

BA-CLM: A Globally Consistent 3D LiDAR Mapping Based on Bundle Adjustment Cost Factors

 ,
,
Abstract
1. Introduction
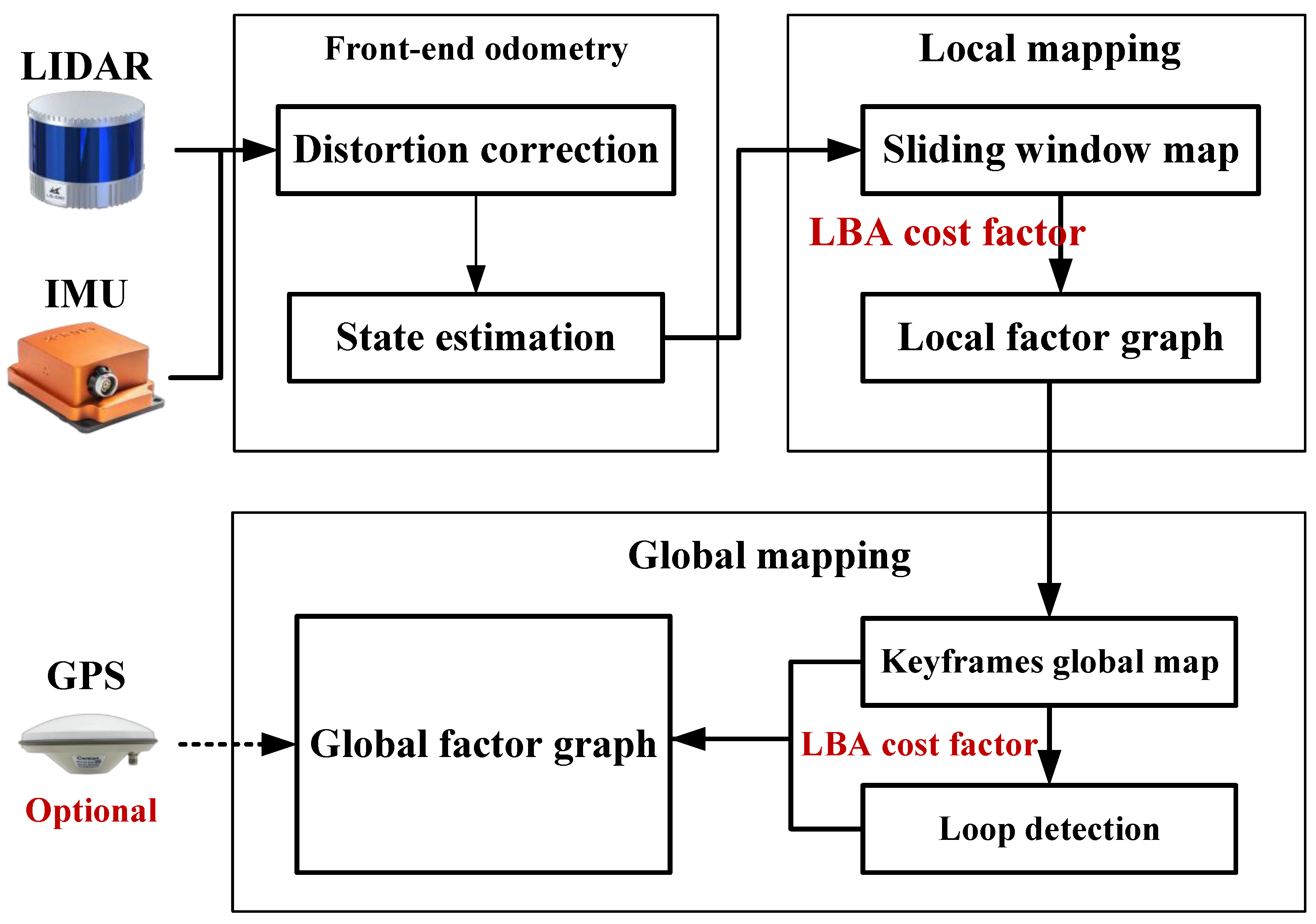
- A voxel-based multivariate LBA cost factor is proposed for consistent mapping, which is created from a synthesized multi-resolution voxel map.
- A real-time globally consistent 3D LiDAR mapping framework (see Figure 1) is presented based on the LBA cost factor and CPU parallel computing.
- The efficiency and effectiveness of the proposed work are extensively validated on multiple public and self-collected LiDAR datasets.
2. Related Work
2.1. Graph-Based LiDAR SLAM
2.2. LiDAR Bundle Adjustment
2.3. Voxel Map
3. Methodology
3.1. LiDAR Bundle Adjustment Cost Factor
3.2. Multi-Resolution Voxel Map
3.3. Global Mapping Framework
3.3.1. Local Mapping Module
| Algorithm 1: Local Mapping |
 |
3.3.2. Global Mapping Module
3.4. Implementation Detail
4. Evaluation
4.1. Public Datasets
4.1.1. KITTI and M2DGR
4.1.2. NCLT
4.2. Self-Collected Dataset
4.3. Runtime Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, W.; Cai, Y.; He, D.; Lin, J.; Zhang, F. FAST-LIO2: Fast Direct LiDAR-Inertial Odometry. IEEE Trans. Robot. 2022, 38, 2053–2073. [Google Scholar] [CrossRef]
- He, D.; Xu, W.; Chen, N.; Kong, F.; Yuan, C.; Zhang, F. Point-LIO: Robust High-Bandwidth Light Detection and Ranging Inertial Odometry. Adv. Intell. Syst. 2023, 5, 2200459. [Google Scholar] [CrossRef]
- Chen, Z.; Xu, Y.; Yuan, S.; Xie, L. iG-LIO: An Incremental GICP-based Tightly-coupled LiDAR-inertial Odometry. IEEE Robot. Autom. Lett. 2024, 9, 1883–1890. [Google Scholar] [CrossRef]
- Borrmann, D.; Elseberg, J.; Lingemann, K.; Nüchter, A.; Hertzberg, J. Globally consistent 3D mapping with scan matching. Robot. Auton. Syst. 2008, 56, 130–142. [Google Scholar] [CrossRef]
- Koide, K.; Yokozuka, M.; Oishi, S.; Banno, A. Globally Consistent 3D LiDAR Mapping With GPU-Accelerated GICP Matching Cost Factors. IEEE Robot. Autom. Lett. 2021, 6, 8591–8598. [Google Scholar] [CrossRef]
- Segal, A.; Haehnel, D.; Thrun, S. Generalized-icp. In Proceedings of the Robotics: Science and Systems, Seattle, WA, USA, 28 June–1 July 2009; Volume 2, p. 435. [Google Scholar]
- Liu, Z.; Zhang, F. BALM: Bundle Adjustment for Lidar Mapping. IEEE Robot. Autom. Lett. 2021, 6, 3184–3191. [Google Scholar] [CrossRef]
- Kim, G.; Kim, A. Scan Context: Egocentric Spatial Descriptor for Place Recognition Within 3D Point Cloud Map. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4802–4809. [Google Scholar] [CrossRef]
- Grisetti, G.; Kümmerle, R.; Stachniss, C.; Burgard, W. A Tutorial on Graph-Based SLAM. IEEE Intell. Transp. Syst. Mag. 2010, 2, 31–43. [Google Scholar] [CrossRef]
- Moré, J.J. The Levenberg-Marquardt algorithm: Implementation and theory. In Proceedings of the Numerical Analysis: Proceedings of the Biennial Conference, Dundee, UK, 28 June–1 July 1977; Springer: Berlin/Heidelberg, Germany, 2006; pp. 105–116. [Google Scholar]
- Kaess, M.; Ranganathan, A.; Dellaert, F. iSAM: Incremental Smoothing and Mapping. IEEE Trans. Robot. 2008, 24, 1365–1378. [Google Scholar] [CrossRef]
- Mendes, E.; Koch, P.; Lacroix, S. ICP-based pose-graph SLAM. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 195–200. [Google Scholar]
- Chen, X.; Milioto, A.; Palazzolo, E.; Giguère, P.; Behley, J.; Stachniss, C. SuMa++: Efficient LiDAR-based Semantic SLAM. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 4530–4537. [Google Scholar] [CrossRef]
- Li, K.; Li, M.; Hanebeck, U.D. Towards high-performance solid-state-lidar-inertial odometry and mapping. IEEE Robot. Autom. Lett. 2021, 6, 5167–5174. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 5135–5142. [Google Scholar] [CrossRef]
- Pan, Y.; Xiao, P.; He, Y.; Shao, Z.; Li, Z. MULLS: Versatile LiDAR SLAM via multi-metric linear least square. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 11633–11640. [Google Scholar]
- Koide, K.; Yokozuka, M.; Oishi, S.; Banno, A. Globally Consistent and Tightly Coupled 3D LiDAR Inertial Mapping. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 5622–5628. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Tardós, J.D. Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef]
- Campos, C.; Elvira, R.; Rodríguez, J.J.G.; Montiel, J.M.; Tardós, J.D. Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam. IEEE Trans. Robot. 2021, 37, 1874–1890. [Google Scholar] [CrossRef]
- Gopinath, S.; Dantu, K.; Ko, S.Y. Improving the Performance of Local Bundle Adjustment for Visual-Inertial SLAM with Efficient Use of GPU Resources. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 6239–6245. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, X.; Zhang, F. Efficient and Consistent Bundle Adjustment on Lidar Point Clouds. IEEE Trans. Robot. 2023, 39, 4366–4386. [Google Scholar] [CrossRef]
- Li, R.; Zhang, X.; Zhang, S.; Yuan, J.; Liu, H.; Wu, S. BA-LIOM: Tightly coupled laser-inertial odometry and mapping with bundle adjustment. Robotica 2024, 42, 684–700. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Z.; Kong, F.; Zhang, F. Large-Scale LiDAR Consistent Mapping Using Hierarchical LiDAR Bundle Adjustment. IEEE Robot. Autom. Lett. 2023, 8, 1523–1530. [Google Scholar] [CrossRef]
- Nießner, M.; Zollhöfer, M.; Izadi, S.; Stamminger, M. Real-time 3D reconstruction at scale using voxel hashing. ACM Trans. Graph. (ToG) 2013, 32, 1–11. [Google Scholar] [CrossRef]
- Bai, C.; Xiao, T.; Chen, Y.; Wang, H.; Zhang, F.; Gao, X. Faster-LIO: Lightweight Tightly Coupled Lidar-Inertial Odometry Using Parallel Sparse Incremental Voxels. IEEE Robot. Autom. Lett. 2022, 7, 4861–4868. [Google Scholar] [CrossRef]
- Wu, C.; You, Y.; Yuan, Y.; Kong, X.; Zhang, Y.; Li, Q.; Zhao, K. VoxelMap++: Mergeable Voxel Mapping Method for Online LiDAR (-Inertial) Odometry. IEEE Robot. Autom. Lett. 2023, 9, 427–434. [Google Scholar] [CrossRef]
- Koide, K.; Yokozuka, M.; Oishi, S.; Banno, A. Voxelized GICP for Fast and Accurate 3D Point Cloud Registration. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 11054–11059. [Google Scholar] [CrossRef]
- Abdi, H.; Williams, L.J. Principal component analysis. Wiley Interdiscip. Rev. Comput. Stat. 2010, 2, 433–459. [Google Scholar] [CrossRef]
- Peng, F.G.; Liu, Y.; Ji, D.H.; Liu, J.R.; Qi, G.T. The method of mass LIDAR point cloud visualization based on “Point Cloud Pyramid”. In Proceedings of the 2012 International Conference on Measurement, Information and Control, Harbin, China, 18–20 May 2012; Volume 1, pp. 177–180. [Google Scholar] [CrossRef]
- Yang, H.; Shi, J.; Carlone, L. Teaser: Fast and certifiable point cloud registration. IEEE Trans. Robot. 2020, 37, 314–333. [Google Scholar] [CrossRef]
- Biber, P.; Strasser, W. The normal distributions transform: A new approach to laser scan matching. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27–31 October 2003; Volume 3, pp. 2743–2748. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for autonomous driving? The kitti vision benchmark suite. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 3354–3361. [Google Scholar]
- Yin, J.; Li, A.; Li, T.; Yu, W.; Zou, D. M2dgr: A multi-sensor and multi-scenario slam dataset for ground robots. IEEE Robot. Autom. Lett. 2021, 7, 2266–2273. [Google Scholar] [CrossRef]
- Carlevaris-Bianco, N.; Ushani, A.K.; Eustice, R.M. University of Michigan North Campus long-term vision and lidar dataset. Int. J. Robot. Res. 2016, 35, 1023–1035. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. LOAM: Lidar odometry and mapping in real-time. In Proceedings of the Robotics: Science and Systems, Berkeley, CA, USA, 12–16 July 2014; Volume 2, pp. 1–9. [Google Scholar]
- Pan, Y.; Zhong, X.; Wiesmann, L.; Posewsky, T.; Behley, J.; Stachniss, C. PIN-SLAM: LiDAR SLAM Using a Point-Based Implicit Neural Representation for Achieving Global Map Consistency. IEEE Trans. Robot. 2024, 1–20. [Google Scholar] [CrossRef]
- Razlaw, J.; Droeschel, D.; Holz, D.; Behnke, S. Evaluation of registration methods for sparse 3D laser scans. In Proceedings of the 2015 European Conference on Mobile Robots (ECMR), Lincoln, UK, 2–4 September 2015; pp. 1–7. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence | BA-CLM | Faster-LIO | FAST-LIO2 | LIO-SAM | BALM2 | HBA | A-LOAM | PIN-SLAM |
|---|---|---|---|---|---|---|---|---|
| M2DGR-S02 * | 1.823 | 2.666 | 2.323 | 4.063 | 2.012 | 1.742 | 5.299 | 2.081 |
| M2DGR-S03 | 0.118 | 0.498 | 0.198 | 0.192 | 0.249 | 0.143 | 0.586 | 0.138 |
| M2DGR-S04 | 0.225 | 1.182 | 0.443 | 1.022 | 0.525 | 0.439 | 2.337 | 0.454 |
| M2DGR-S05 * | 0.295 | 1.182 | 0.378 | 1.022 | 0.601 | 0.278 | 1.364 | 0.581 |
| M2DGR-S06 * | 0.384 | 0.457 | 0.413 | 0.417 | 0.397 | 0.400 | 0.682 | 0.777 |
| M2DGR-S07 * | 10.772 | 11.736 | 11.751 | 28.642 | 11.851 | 9.899 | 28.940 | 16.881 |
| KITTI00 | 1.227 | 4.602 | 3.851 | 8.017 | 2.732 | 1.557 | 19.417 | 1.588 |
| KITTI04 * | 0.361 | 0.752 | 0.555 | 0.743 | 0.633 | 0.565 | 0.593 | 0.326 |
| KITTI06 | 0.272 | 1.044 | 1.296 | 0.872 | 0.677 | 0.532 | 1.189 | 0.434 |
| KITTI07 | 0.935 | 1.456 | 0.883 | 0.639 | 0.623 | 0.548 | 1.301 | 0.419 |
| Sequence | Length [m] | BA-CLM | Faster-LIO |
|---|---|---|---|
| 20120429 | 1.268 | ||
| 20120511 | 2.299 | ||
| 20120615 | 1.863 | ||
| 20130110 | 0.966 | ||
| average [%] | 0.052% | ||
| Sequence | Length [m] | BA-CLM | FAST-LIO2 | LIO-SAM |
|---|---|---|---|---|
| 01 | −1.767 | |||
| 02 | −1.824 | |||
| 03 | −2.113 |
| Step | Time Cost [ms] |
|---|---|
| Point Cloud Voxelization | |
| Multi-resolution Voxel Map Construction | |
| Local Map Optimization | |
| Global Map Optimization | |
| Average Time Per Frame |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, B.; Lin, W.; Ouyang, W.; Shen, C.; Sun, S.; Sun, Y.; Sun, L. BA-CLM: A Globally Consistent 3D LiDAR Mapping Based on Bundle Adjustment Cost Factors. Sensors 2024, 24, 5554. https://doi.org/10.3390/s24175554
Shi B, Lin W, Ouyang W, Shen C, Sun S, Sun Y, Sun L. BA-CLM: A Globally Consistent 3D LiDAR Mapping Based on Bundle Adjustment Cost Factors. Sensors. 2024; 24(17):5554. https://doi.org/10.3390/s24175554
Chicago/Turabian StyleShi, Bohan, Wanbiao Lin, Wenlan Ouyang, Chenyu Shen, Siyang Sun, Yan Sun, and Lei Sun. 2024. "BA-CLM: A Globally Consistent 3D LiDAR Mapping Based on Bundle Adjustment Cost Factors" Sensors 24, no. 17: 5554. https://doi.org/10.3390/s24175554
APA StyleShi, B., Lin, W., Ouyang, W., Shen, C., Sun, S., Sun, Y., & Sun, L. (2024). BA-CLM: A Globally Consistent 3D LiDAR Mapping Based on Bundle Adjustment Cost Factors. Sensors, 24(17), 5554. https://doi.org/10.3390/s24175554