
SC-AOF: A Sliding Camera and Asymmetric Optical-Flow-Based Blending Method for Image Stitching

Abstract
1. Introduction
- The SC-AOF method innovatively uses an approach based on sliding camera to reduce perspective deformation. Combined with either a global projection model or a local projection model, this method can effectively reduce the perspective deformation.
- An optical-flow-based image alignment and blending method is adopted to further mitigate misalignment and improve the stitching quality of the mosaic generated by a global projection model.
- Each step in the SC-AOF method can be combined with other methods to improve the stitching quality of those methods.
2. Related Works
3. Methodology
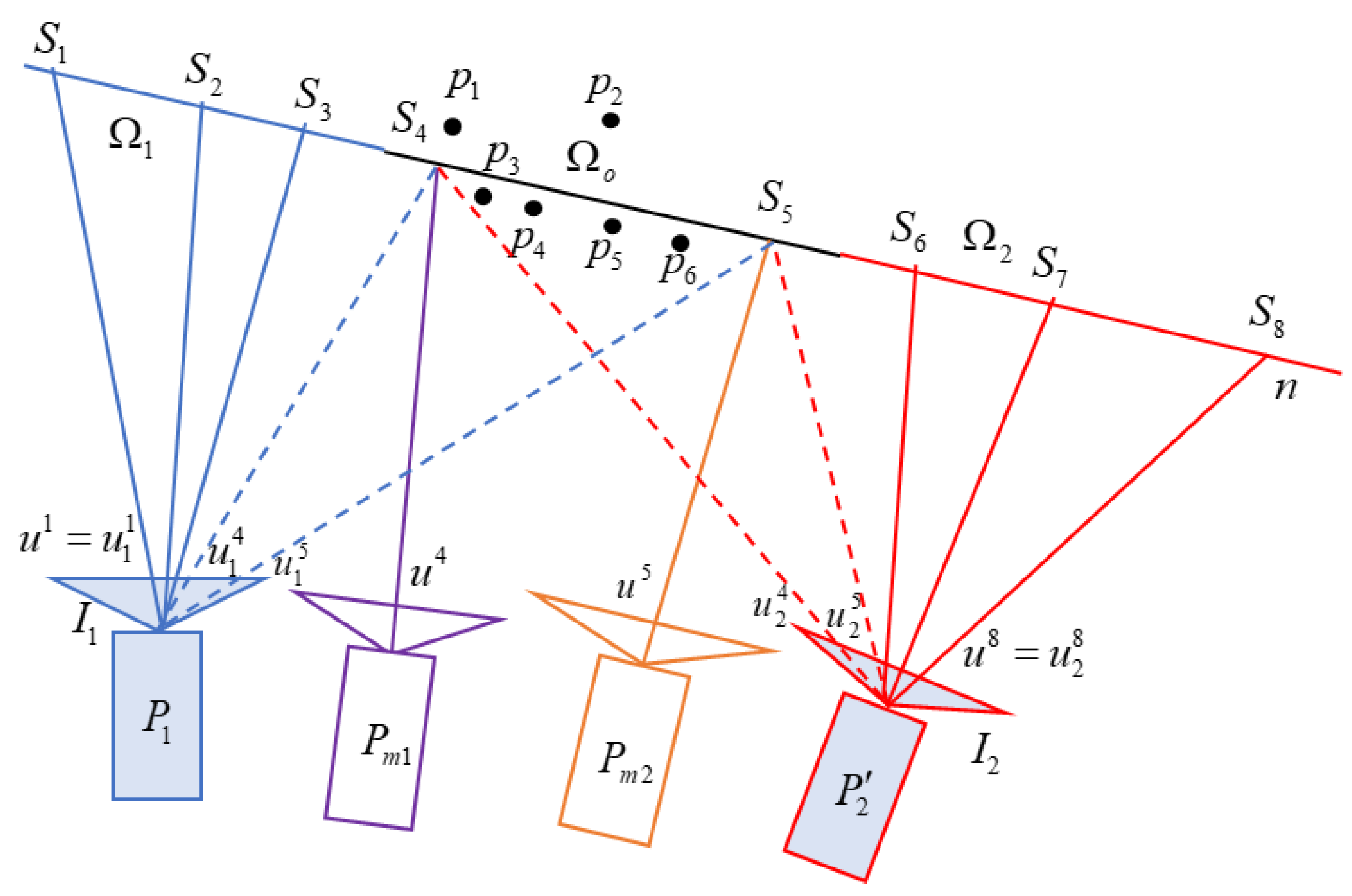
3.1. SC: Viewpoint Preservation Based on Sliding Camera
3.1.1. SC Stitching Process
3.1.2. Global Projection Surface Calculation
3.1.3. Projection Matrix Adjustment and Sliding Camera Generation
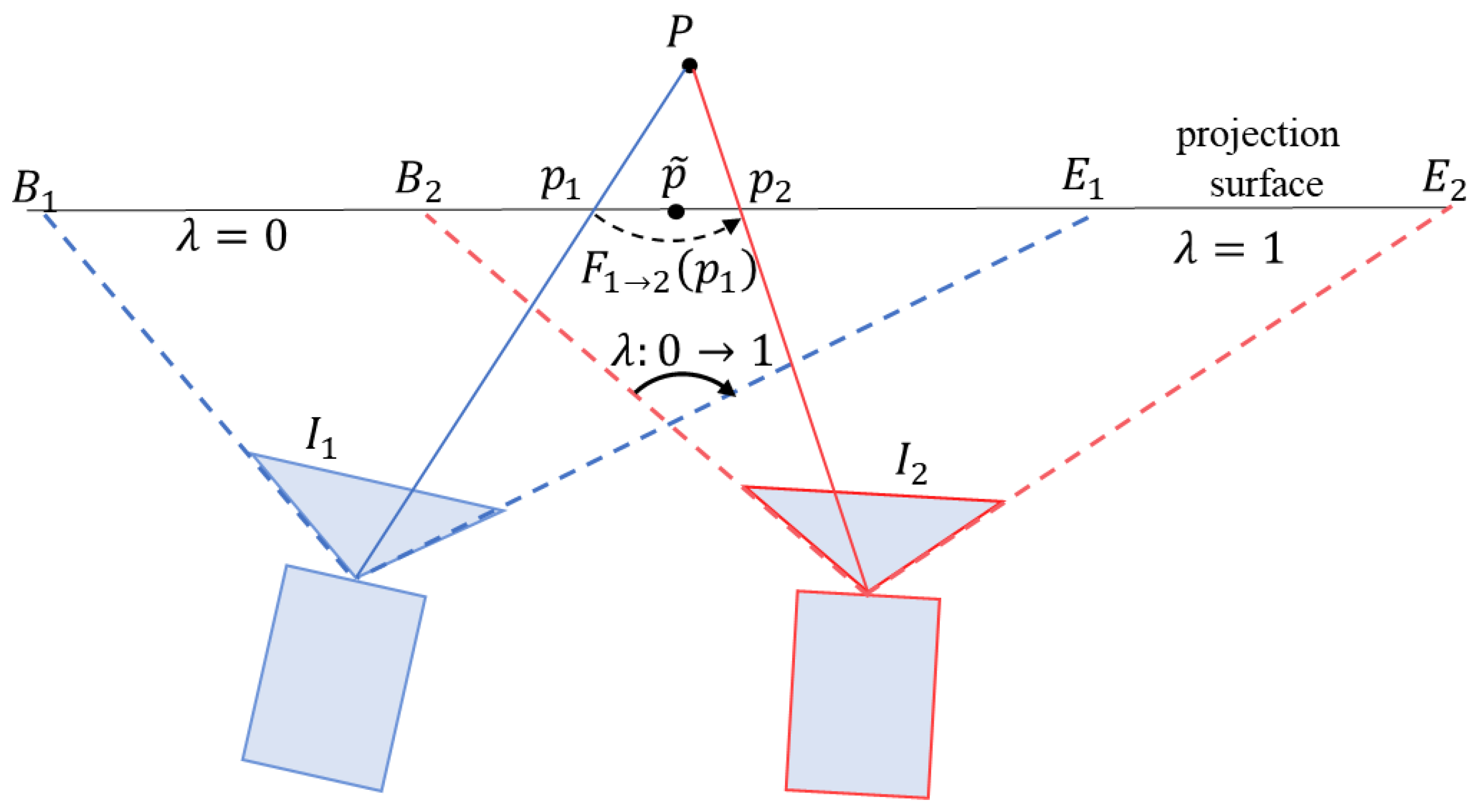
3.2. AOF: Image Alignment Based on Asymmetric Optical Flow
3.2.1. Image Blending Process of AOF
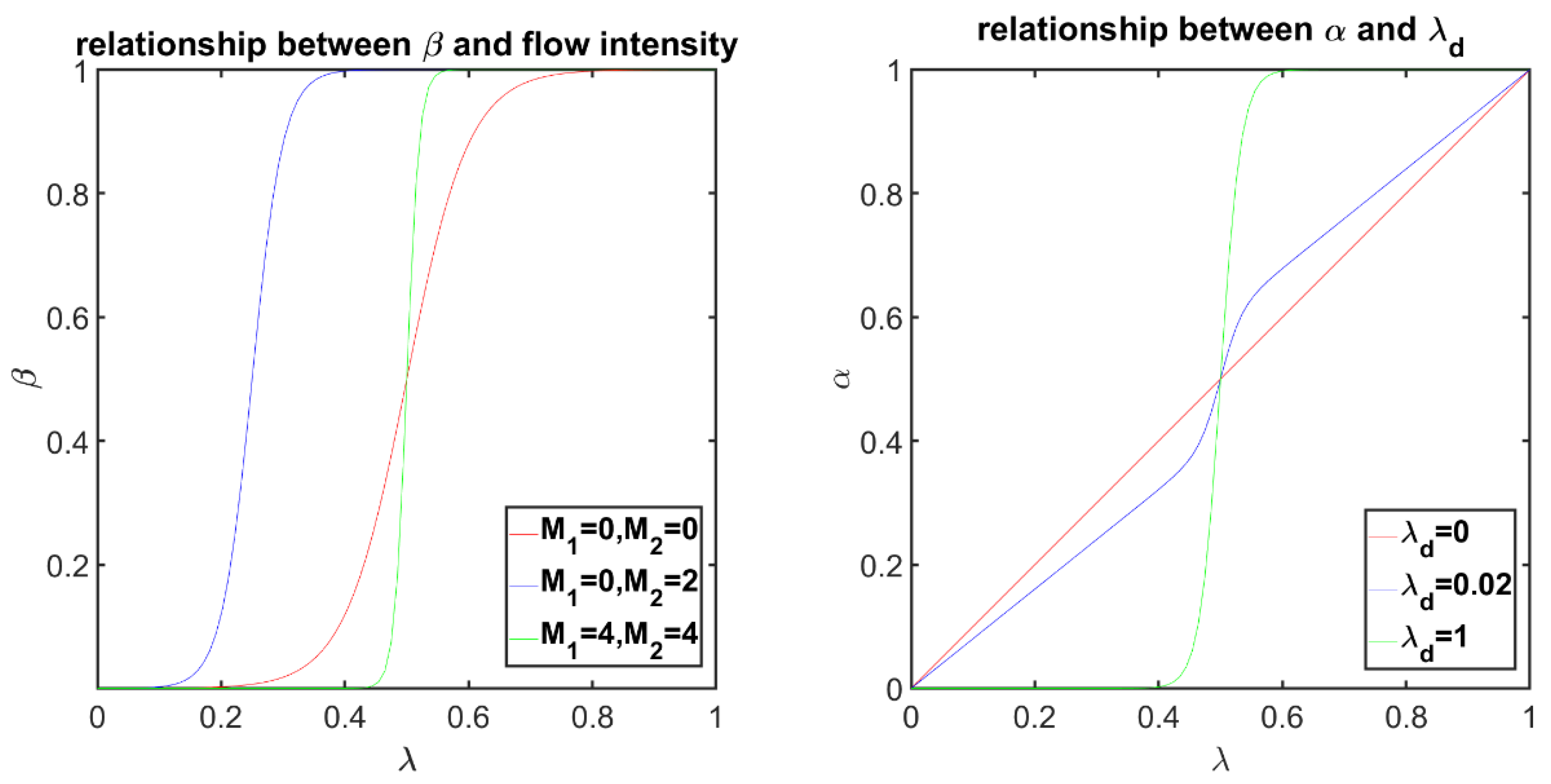
3.2.2. Calculation of Asymmetric Optical Flow
3.3. Estimation of Image Intrinsic and Extrinsic Parameters
4. Experiment
4.1. Effectiveness Analysis of SC-AOF Method
- The first two experiments compare typical methods for solving perspective deformation and local alignment, respectively, and all the methods in the first two experiments are included in the third experiment to show the superiority of the SC-AOF method in all aspects.
- Since the averaging methods generally underperform compared to linear blending ones, all methods to be compared adopt linear blending to achieve the best performance.
- All methods other than ours use the parameters recommended by their proposers. Our SC-AOF method has the following parameter settings in optical-flow-based image blending: 10, 100, and 10.
4.1.1. Perspective Deformation Reduction
4.1.2. Local Alignment
- The APAP method performs fairly well in most images, though with some alignment errors. This is because the moving DLT method smooths the mosaics to some extent.
- The TFT-generated stitched image is of excellent quality in planar areas. But when there is a sudden depth change in the scene, there are serious distortions. This is because large errors appear when calculating planes using three vertices of a triangle in the area with sudden depth changes.
- The REW method has large alignment errors in the planar area and aligns the images better than the APAP and TFT method in all other scenes. This is because the fewer feature points in the planar area might be filtered out as mismatched points by the REW method.
- APAP and AANAP have high scores on all image pairs, but the scores are lower than our method and REW, proving that APAP and AANAP blur mosaics to some extent.
- When SPHP is not combined with APAP, only the global homography is used to align the images, resulting in lower scores compared to other methods.
- TFT has higher scores on the datasets except for the building dataset. TFT can improve alignment accuracy but also bring instability.
- SPW combines quasi-homography and content-preserving warping to align images, which add other constraints while also reducing the accuracy of alignment, resulting in lower scores compared to REW and our method.
- Both REW and our method use a global homography matrix to coarsely align the images. Afterwards, in REW and our method, a deformation field and optical flow are applied to further align the images, respectively. Therefore, both methods have higher scores and robustness than other methods.
4.1.3. Stitching Speed Comparison
4.1.4. Overall Scoring for All the Methods
- The subjective scoring of perspective deformation reduction. The scores from 0 to 2, respectively, indicate severe deformation, slight relief of deformation, and less deformation.
- The subjective scoring of local alignment. The score ranges from 0 to 2, where 0 indicates obvious ghosting in many regions, 1 indicates few or mild mismatches, and 2 indicates no apparent alignment errors.
- The objective scoring of local alignment. The score ranges from 0 to 3. We define the mean and standard deviation of the SSIM values of different methods on the same image pair as and , the SSIM of current method is , the score of the method is 0, 1, 2 and 3, respectively, when satisfies , , and .
- The scoring of running time. Like the objective scoring for local alignment, we score 0 when the running time of the method is greater than the mean plus standard deviation. When the time is less than the mean plus standard deviation and greater than the mean, the score is 1. The score is 2 when the time is less than the mean and greater than the mean minus standard deviation. Otherwise, the score is 3.
4.2. Compatibility of SC-AOF Method
4.2.1. SC Module Compatibility Analysis
- Use the global similarity transformation to project onto the coordinate system to calculate the size and mesh vertices of the mosaic;
- Use Equations (6)–(9) to calculate the weights of mesh vertices and the projection matrix, replace the homography in (2) with the homography matrix in local alignment model, and bring them into (12) to compute the warped images and blend them.
4.2.2. Blending Module Compatibility Analysis
- Generate two projected images using one of the other algorithms and calculate the blending parameters based on the overlapping areas;
- Set the optical flow value to be 0, replace linear blending parameter with in Equation (17) to blend warped images, preserve the blending band width in the low-frequency area and narrow the blending width in the high-frequency area to obtain a better image stitching effect.
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Description |
|---|---|
| , | the source image pair and the final mosaic |
| the global projection plane | |
| the non-overlapping area of | |
| the overlapping area of and | |
| the camera projection matrix of | |
| the projection matrix of | |
| the adjusted projection matrix of to unify the pixel coordinates of and | |
| the non-homogeneous coordinate of the pixel in | |
| the homogeneous coordinate of the pixel in | |
| the non-homogeneous coordinate of the pixel in | |
| the homogeneous coordinate of the pixel in | |
| the sampling points on the plane which are projected onto in | |
| the 3D scene points | |
| the cameras corresponding to and | |
| the internal parameter matrices of | |
| the 3 by 3 identity matrix | |
| the rotation matrix and location of the optical center of in coordinate system | |
| normalized coordinates of and | |
| the similarity matrix between and | |
| the rotation matrix and translation vector corresponding to | |
| the internal parameter matrix, the rotation matrix and the translation vector corresponding to | |
| the quaternions corresponding to , and | |
| the homography between and | |
| the warped image of using | |
| the optical flow of in which makes | |
| the pixel in and corresponding pixel in | |
| the optical flow magnitude of and | |
| the softmax function’s shape coefficien and the optical flow’s enhancement coefficient | |
| the weight which makes transition from to linearly | |
| the softmax weight to transition from to fastly | |
| the linear combinationof and which makes the transition of from to depends on the color difference | |
| the color difference and the hyperbolic tangent function of the color difference | |
| the optical flow of | |
| the error function of used for solving the optimal optical flow | |
| the optical flow’s alignment error, consistency error and penalty for large value | |
| the i-th homography transforming to and the corresponding inlier set | |
| the initial set and the final inlier set of matched feature points | |
| the projection errors of the epipolar constraint and of the infinite homography constraint | |
| the robust kernel function to reduce the impact of false matches to optimization |
| Abbreviation | Meaning |
|---|---|
| SC | sliding camera, proposed by us to solve the perspective deformation |
| AOF | asymmetric optical flow, proposed by us to slove the local alignment |
| APAP | as-projective-as-possible, used to solve the local alignment by location-dependent homography warping |
| DLT | direct linear transform, used for estimating the parameters of the homography |
| REW | robust elastic warping, used to improve the local alignment using deformation fields |
| TPS | thin-plate spline, used to compute deformation fields corresponding to matched feature points |
| TFT | triangular facet approximation, using scene triangular facet estimating to improve the local alignment |
| NIS | natural image stitching, a local alignment method using the depth map |
| SPHP | shape preserving half projective, solving perspective deformation by gradually changing the resultant warp from projective to similarity |
| AANAP | adaptive as-natural-as-possible, a method to solve perspective deformation |
| GSP | global similarity prior, used to align images and reduce deformation |
| SPW | single-projective warp, which adopts the quasi-homography warp to mitigate projective distortion and preserve single perspective |
| SPSO | structure preservation and seam optimization, a method can obtain precise alignment while preserving local and global image structures. |
| GES-GSP | geometric structure preserving-global similarity prior, based on GSP to futher protect the large-scale geometric structure from distortion |
| SIFT | scale-invariant feature transform, a feature detection and description method |
| SURF | speed-up robust feature, a feature detection and description method, faster than SIFT |
| KNN | k-nearest neighbor, a feature matching method |
| RAFT | recurrent all-pairs field transforms, estimating optical flow based on deep learning |
| RANSAC | random sample consensus, used to filter outliers and estimate model parameters |
Appendix B












| APAP | AANAP | SPHP | TFT | REW | SPW | Ours | |
|---|---|---|---|---|---|---|---|
| roundabout | 0.85 | 0.86 | 0.77 | 0.86 | 0.86 | 0.76 | 0.87 |
| fence | 0.93 | 0.95 | 0.81 | 0.95 | 0.95 | 0.93 | 0.95 |
| railtracks | 0.77 | 0.90 | 0.62 | 0.92 | 0.85 | 0.77 | 0.94 |
| temple | 0.90 | 0.91 | 0.73 | 0.95 | 0.94 | 0.85 | 0.96 |
| corner | 0.98 | 0.97 | 0.91 | 0.73 | 0.98 | 0.97 | 0.96 |
| shelf | 0.98 | 0.98 | 0.84 | 0.95 | 0.97 | 0.96 | 0.97 |
| standing-he | 0.72 | 0.77 | 0.64 | 0.35 | 0.78 | 0.71 | 0.84 |
| foundation | 0.75 | 0.78 | 0.58 | 0.83 | 0.76 | 0.71 | 0.80 |
| guardbar | 0.74 | 0.74 | 0.58 | 0.79 | 0.77 | 0.65 | 0.76 |
| office | 0.79 | 0.78 | 0.55 | 0.84 | 0.65 | 0.75 | 0.88 |
| plantain | 0.85 | 0.85 | 0.67 | 0.31 | 0.82 | 0.85 | 0.90 |
| building4 | 0.71 | 0.72 | 0.58 | 0.73 | 0.74 | 0.70 | 0.78 |
| potberry | 0.89 | 0.89 | 0.68 | 0.93 | 0.87 | 0.82 | 0.91 |
| lawn | 0.92 | 0.95 | 0.79 | 0.95 | 0.95 | 0.93 | 0.95 |
| worktable | 0.87 | 0.84 | 0.59 | 0.86 | 0.97 | 0.85 | 0.97 |

References
- Abbadi, N.K.E.L.; Al Hassani, S.A.; Abdulkhaleq, A.H. A review over panoramic image stitching techniques. J. Phys. Conf. Ser. 2021, 1999, 012115. [Google Scholar] [CrossRef]
- Gómez-Reyes, J.K.; Benítez-Rangel, J.P.; Morales-Hernández, L.A.; Resendiz-Ochoa, E.; Camarillo-Gomez, K.A. Image mosaicing applied on UAVs survey. Appl. Sci. 2022, 12, 2729. [Google Scholar] [CrossRef]
- Xu, Q.; Chen, J.; Luo, L.; Gong, W.; Wang, Y. UAV image stitching based on mesh-guided deformation and ground constraint. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 4465–4475. [Google Scholar] [CrossRef]
- Wen, S.; Wang, X.; Zhang, W.; Wang, G.; Huang, M.; Yu, B. Structure Preservation and Seam Optimization for Parallax-Tolerant Image Stitching. IEEE Access 2022, 10, 78713–78725. [Google Scholar] [CrossRef]
- Tang, W.; Jia, F.; Wang, X. An improved adaptive triangular mesh-based image warping method. Front. Neurorobotics 2023, 16, 1042429. [Google Scholar] [CrossRef]
- Li, J.; Deng, B.; Tang, R.; Wang, Z.; Yan, Y. Local-adaptive image alignment based on triangular facet approximation. IEEE Trans. Image Process. 2019, 29, 2356–2369. [Google Scholar] [CrossRef] [PubMed]
- Lee, K.Y.; Sim, J.Y. Warping residual based image stitching for large parallax. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 16–18 June 2020; pp. 8198–8206. [Google Scholar]
- Zhu, S.; Zhang, Y.; Zhang, J.; Hu, H.; Zhang, Y. ISGTA: An effective approach for multi-image stitching based on gradual transformation matrix. Signal Image Video Process. 2023, 17, 3811–3820. [Google Scholar] [CrossRef]
- Zaragoza, J.; Chin, T.J.; Brown, M.S.; Suter, D. As-Projective-As-Possible Image Stitching with Moving DLT. In Proceedings of the Computer Vision and Pattern Recognition (CVPR), Portland, OR, USA, 25–27 June 2013. [Google Scholar]
- Li, J.; Wang, Z.; Lai, S.; Zhai, Y.; Zhang, M. Parallax-tolerant image stitching based on robust elastic warping. IEEE Trans. Multimed. 2017, 20, 1672–1687. [Google Scholar] [CrossRef]
- Xue, F.; Zheng, D. Elastic Warping with Global Linear Constraints for Parallax Image Stitching. In Proceedings of the 2023 15th International Conference on Advanced Computational Intelligence (ICACI), Seoul, Republic of Korea, 6–9 May 2023; pp. 1–6. [Google Scholar]
- Liao, T.; Li, N. Natural Image Stitching Using Depth Maps. arXiv 2022, arXiv:2202.06276. [Google Scholar]
- Cong, Y.; Wang, Y.; Hou, W.; Pang, W. Feature Correspondences Increase and Hybrid Terms Optimization Warp for Image Stitching. Entropy 2023, 25, 106. [Google Scholar] [CrossRef]
- Chang, C.H.; Sato, Y.; Chuang, Y.Y. Shape-preserving half-projective warps for image stitching. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 3254–3261. [Google Scholar]
- Chen, J.; Li, Z.; Peng, C.; Wang, Y.; Gong, W. UAV image stitching based on optimal seam and half-projective warp. Remote Sens. 2022, 14, 1068. [Google Scholar] [CrossRef]
- Lin, C.-C.; Pankanti, S.U.; Ramamurthy, K.N.; Aravkin, A.Y. Adaptive as-natural-as-possible image stitching. In Proceedings of the Computer Vision & Pattern Recognition, Boston, MA, USA, 7–10 June 2015. [Google Scholar] [CrossRef]
- Chen, Y.; Chuang, Y. Natural Image Stitching with the Global Similarity Prior. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; Springer International Publishing: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Cui, J.; Liu, M.; Zhang, Z.; Yang, S.; Ning, J. Robust UAV thermal infrared remote sensing images stitching via overlap-prior-based global similarity prior model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 270–282. [Google Scholar] [CrossRef]
- Liao, T.; Li, N. Single-perspective warps in natural image stitching. IEEE Trans. Image Process. 2019, 29, 724–735. [Google Scholar] [CrossRef]
- Li, N.; Xu, Y.; Wang, C. Quasi-homography warps in image stitching. IEEE Trans. Multimed. 2017, 20, 1365–1375. [Google Scholar] [CrossRef]
- Du, P.; Ning, J.; Cui, J.; Huang, S.; Wang, X.; Wang, J. Geometric Structure Preserving Warp for Natural Image Stitching. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–24 June 2022; pp. 3688–3696. [Google Scholar]
- Bertel, T.; Campbell, N.D.F.; Richardt, C. Megaparallax: Casual 360 panoramas with motion parallax. IEEE Trans. Vis. Comput. Graph. 2019, 25, 1828–1835. [Google Scholar] [CrossRef]
- Meng, M.; Liu, S. High-quality Panorama Stitching based on Asymmetric Bidirectional Optical Flow. In Proceedings of the 2020 5th International Conference on Computational Intelligence and Applications (ICCIA), Virtual, 19–21 June 2020; pp. 118–122. [Google Scholar]
- Hofinger, M.; Bulò, S.R.; Porzi, L.; Knapitsch, A.; Pock, T.; Kontschieder, P. Improving optical flow on a pyramid level. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; Springer International Publishing: Cham, Switzerland, 2020; pp. 770–786. [Google Scholar]
- Shah, S.T.H.; Xiang, X. Traditional and modern strategies for optical flow: An investigation. SN Appl. Sci. 2021, 3, 289. [Google Scholar] [CrossRef]
- Zhai, M.; Xiang, X.; Lv, N.; Kong, X. Optical flow and scene flow estimation: A survey. Pattern Recognit. 2021, 114, 107861. [Google Scholar] [CrossRef]
- Liu, C.; Yuen, J.; Torralba, A. Sift flow: Dense correspondence across scenes and its applications. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 978–994. [Google Scholar] [CrossRef]
- Zhao, S.; Zhao, L.; Zhang, Z.; Zhou, E.; Metaxas, D. Global matching with overlapping attention for optical flow estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–24 June June 2022; pp. 17592–17601. [Google Scholar]
- Rao, S.; Wang, H. Robust optical flow estimation via edge preserving filtering. Signal Process. Image Commun. 2021, 96, 116309. [Google Scholar] [CrossRef]
- Jeong, J.; Lin, J.; Porikli, F.; Kwak, N. Imposing consistency for optical flow estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–24 June 2022; pp. 3181–3191. [Google Scholar]
- Anderson, R.; Gallup, D.; Barron, J.T.; Kontkanen, J.; Snavely, N.; Hernández, C.; Agarwal, S.; Seitz, S.M. Jump: Virtual reality video. ACM Trans. Graph. (TOG) 2016, 35, 1–13. [Google Scholar] [CrossRef]
- Teed, Z.; Deng, J. Raft: Recurrent all-pairs field transforms for optical flow. In Proceedings of the Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part II 16. Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 402–419. [Google Scholar]
- Huang, Z.; Shi, X.; Zhang, C.; Wang, Q.; Cheung, K.C.; Qin, H.; Dai, J.; Li, H. Flowformer: A transformer architecture for optical flow. In Proceedings of the European Conference on Computer Vision, Tel Aviv, Israel, 23–27 October 2022; Springer Nature: Cham, Switzerland, 2022; pp. 668–685. [Google Scholar]
- Available online: https://github.com/facebookarchive/Surround360 (accessed on 1 January 2022).
- Zhang, Y. Camera calibration. In 3-D Computer Vision: Principles, Algorithms and Applications; Springer Nature: Singapore, 2023; pp. 37–65. [Google Scholar]
- Zhang, Y.; Zhao, X.; Qian, D. Learning-Based Framework for Camera Calibration with Distortion Correction and High Precision Feature Detection. arXiv 2022, arXiv:2202.00158. [Google Scholar]
- Fang, J.; Vasiljevic, I.; Guizilini, V.; Ambrus, R.; Shakhnarovich, G.; Gaidon, A.; Walter, M.R. Self-supervised camera self-calibration from video. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 8468–8475. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]













| APAP | AANAP | SPHP | TFT | REW | SPW | Ours | |
|---|---|---|---|---|---|---|---|
| building1 | 0.88 | 0.87 | 0.75 | 0.88 | 0.89 | 0.86 | 0.90 |
| building2 | 0.82 | 0.82 | 0.75 | 0.92 | 0.76 | 0.81 | 0.93 |
| garden | 0.90 | 0.92 | 0.81 | 0.82 | 0.95 | 0.92 | 0.93 |
| building3 | 0.93 | 0.94 | 0.89 | 0.70 | 0.96 | 0.90 | 0.96 |
| school | 0.89 | 0.91 | 0.67 | 0.90 | 0.91 | 0.87 | 0.93 |
| wall | 0.83 | 0.91 | 0.68 | 0.90 | 0.82 | 0.81 | 0.92 |
| park-square | 0.95 | 0.96 | 0.80 | 0.97 | 0.97 | 0.95 | 0.97 |
| cabinet | 0.91 | 0.91 | 0.87 | 0.89 | 0.98 | 0.92 | 0.96 |
| campus-square | 0.92 | 0.94 | 0.84 | 0.95 | 0.98 | 0.93 | 0.97 |
| racetracks | 0.74 | 0.79 | 0.68 | 0.86 | 0.83 | 0.70 | 0.85 |
| APAP | AANAP | SPHP | TFT | REW | SPW | Ours | |
|---|---|---|---|---|---|---|---|
| building1 | 1 + 2 + 2 + 2 = 7 | 2 + 2 + 2 + 0 = 6 | 2 + 2 + 0 + 2 = 6 | 1 + 2 + 2 + 1 = 6 | 1 + 2 + 2 + 3 = 8 | 1 + 2 + 1 + 2 = 6 | 2 + 2 + 2 + 2 = 8 |
| building2 | 0 + 1 + 1 + 2 = 4 | 1 + 2 + 1 + 0 = 4 | 2 + 0 + 0 + 2 = 4 | 1 + 0 + 3 + 0 = 4 | 1 + 2 + 0 + 3 = 6 | 1 + 1 + 1 + 2 = 5 | 2 + 2 + 3 + 2 = 9 |
| garden | 1 + 2 + 2 + 1 = 6 | 2 + 2 + 2 + 0 = 6 | 2 + 1 + 0 + 1 = 4 | 1 + 1 + 0 + 2 = 4 | 1 + 2 + 3 + 3 = 9 | 2 + 2 + 2 + 1 = 7 | 2 + 2 + 3 + 2 = 9 |
| building3 | 1 + 1 + 2 + 2 = 6 | 2 + 1 + 2 + 0 = 5 | 2 + 2 + 1 + 2 = 7 | 0 + 0 + 0 + 0 = 0 | 1 + 2 + 2 + 3 = 8 | 1 + 2 + 2 + 2 = 7 | 2 + 2 + 2 + 2 = 8 |
| school | 0 + 2 + 2 + 2 = 6 | 2 + 2 + 2 + 0 = 6 | 2 + 2 + 0 + 2 = 6 | 0 + 2 + 2 + 2 = 6 | 0 + 2 + 2 + 2 = 6 | 1 + 2 + 2 + 2 = 7 | 2 + 2 + 2 + 2 = 8 |
| wall | 0 + 1 + 1 + 2 = 4 | 2 + 2 + 2 + 0 = 6 | 2 + 0 + 0 + 2 = 4 | 1 + 2 + 2 + 1 = 6 | 1 + 1 + 1 + 2 = 5 | 0 + 1 + 1 + 2 = 4 | 2 + 2 + 3 + 2 = 9 |
| park-square | 1 + 2 + 2 + 2 = 7 | 1 + 2 + 2 + 0 = 5 | 2 + 0 + 0 + 1 = 3 | 1 + 2 + 2 + 2 = 7 | 1 + 2 + 2 + 3 = 8 | 1 + 2 + 2 + 0 = 5 | 2 + 2 + 2 + 2 = 8 |
| cabinet | 1 + 1 + 1 + 2 = 5 | 2 + 1 + 1 + 0 = 4 | 2 + 2 + 0 + 2 = 6 | 2 + 0 + 1 + 2 = 5 | 2 + 2 + 3 + 2 = 9 | 1 + 2 + 2 + 2 = 7 | 2 + 2 + 3 + 2 = 9 |
| campus-square | 0 + 2 + 1 + 2 = 5 | 1 + 2 + 2 + 0 = 5 | 2 + 2 + 0 + 2 = 6 | 0 + 2 + 2 + 2 = 6 | 0 + 2 + 3 + 3 = 8 | 0 + 2 + 1 + 2 = 5 | 2 + 2 + 2 + 2 = 8 |
| racetracks | 2 + 1 + 1 + 2 = 6 | 2 + 1 + 2 + 0 = 5 | 2 + 0 + 0 + 1 = 3 | 2 + 2 + 3 + 2 = 9 | 2 + 2 + 2 + 3 = 9 | 1 + 1 + 0 + 1 = 3 | 2 + 2 + 3 + 2 = 9 |
| roundabout | 2 + 2 + 2 + 2 = 8 | 2 + 2 + 2 + 0 = 6 | 2 + 2 + 0 + 1 = 5 | 2 + 1 + 2 + 1 = 6 | 2 + 2 + 2 + 2 = 8 | 2 + 2 + 0 + 2 = 6 | 2 + 2 + 2 + 2 = 8 |
| fence | 1 + 2 + 2 + 2 = 7 | 2 + 2 + 2 + 0 = 6 | 2 + 1 + 0 + 2 = 5 | 1 + 1 + 2 + 1 = 5 | 1 + 2 + 2 + 2 = 7 | 2 + 2 + 2 + 2 = 8 | 2 + 2 + 2 + 2 = 8 |
| railtracks | 2 + 1 + 1 + 2 = 6 | 2 + 2 + 2 + 0 = 6 | 2 + 0 + 0 + 2 = 4 | 2 + 2 + 2 + 2 = 8 | 2 + 2 + 2 + 2 = 8 | 2 + 1 + 1 + 0 = 4 | 2 + 2 + 3 + 2 = 9 |
| temple | 1 + 2 + 2 + 2 = 7 | 2 + 2 + 2 + 0 = 6 | 2 + 2 + 0 + 2 = 6 | 1 + 1 + 2 + 2 = 4 | 1 + 2 + 2 + 2 = 7 | 1 + 1 + 1 + 2 = 5 | 2 + 2 + 2 + 2 = 8 |
| corner | 2 + 2 + 2 + 1 = 7 | 2 + 1 + 2 + 0 = 5 | 2 + 1 + 1 + 2 = 6 | 2 + 0 + 0 + 2 = 4 | 2 + 2 + 2 + 2 = 8 | 2 + 1 + 2 + 2 = 7 | 2 + 2 + 2 + 2 = 8 |
| shelf | 2 + 2 + 2 + 1 = 7 | 2 + 2 + 2 + 0 = 6 | 2 + 2 + 0 + 2 = 6 | 2 + 1 + 2 + 2 = 7 | 2 + 2 + 2 + 3 = 9 | 2 + 2 + 2 + 1 = 7 | 2 + 2 + 2 + 2 = 8 |
| standing-he | 1 + 1 + 2 + 2 = 6 | 2 + 1 + 1 + 1 = 5 | 2 + 1 + 1 + 2 = 6 | 0 + 0 + 1 + 2 = 3 | 1 + 1 + 2 + 2 = 6 | 1 + 1 + 2 + 0 = 4 | 2 + 1 + 3 + 2 = 8 |
| foundation | 1 + 2 + 2 + 2 = 7 | 2 + 2 + 2 + 0 = 6 | 2 + 2 + 0 + 2 = 6 | 1 + 1 + 3 + 2 = 7 | 2 + 2 + 2 + 2 = 8 | 1 + 2 + 1 + 0 = 4 | 2 + 2 + 2 + 2 = 8 |
| guardbar | 1 + 1 + 2 + 1 = 5 | 2 + 1 + 2 + 0 = 5 | 2 + 1 + 0 + 2 = 5 | 1 + 1 + 3 + 2 = 7 | 1 + 1 + 2 + 2 = 6 | 1 + 1 + 1 + 1 = 4 | 2 + 1 + 2 + 2 = 7 |
| office | 1 + 1 + 2 + 2 = 6 | 2 + 1 + 2 + 0 = 5 | 2 + 1 + 0 + 2 = 5 | 0 + 1 + 2 + 1 = 4 | 1 + 1 + 1 + 3 = 6 | 0 + 1 + 2 + 1 = 4 | 2 + 2 + 3 + 2 = 9 |
| plantain | 1 + 2 + 2 + 2 = 7 | 1 + 2 + 2 + 0 = 5 | 2 + 2 + 1 + 2 = 7 | 0 + 0 + 0 + 1 = 1 | 2 + 1 + 2 + 3 = 8 | 1 + 2 + 2 + 2 = 7 | 2 + 2 + 2 + 2 = 8 |
| building4 | 1 + 1 + 2 + 1 = 5 | 2 + 1 + 2 + 0 = 5 | 2 + 1 + 0 + 2 = 5 | 1 + 1 + 2 + 2 = 6 | 1 + 2 + 2 + 2 = 7 | 1 + 2 + 1 + 2 = 6 | 2 + 2 + 3 + 2 = 9 |
| potberry | 2 + 2 + 2 + 2 = 8 | 2 + 2 + 2 + 2 = 8 | 2 + 2 + 0 + 2 = 6 | 2 + 2 + 2 + 1 = 7 | 2 + 1 + 2 + 3 = 8 | 1 + 1 + 1 + 0 = 3 | 2 + 2 + 2 + 2 = 8 |
| lawn | 1 + 2 + 2 + 2 = 7 | 1 + 2 + 2 + 2 = 7 | 2 + 2 + 0 + 0 = 4 | 1 + 2 + 2 + 1 = 6 | 1 + 2 + 2 + 3 = 8 | 1 + 2 + 2 + 1 = 6 | 2 + 2 + 2 + 2 = 8 |
| worktable | 2 + 1 + 2 + 2 = 7 | 2 + 1 + 1 + 0 = 4 | 1 + 1 + 0 + 2 = 4 | 2 + 0 + 2 + 2 = 6 | 2 + 2 + 2 + 2 = 8 | 2 + 1 + 2 + 0 = 5 | 2 + 2 + 2 + 2 = 8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, J.; Li, Q.; Liang, Y.; Zhou, L. SC-AOF: A Sliding Camera and Asymmetric Optical-Flow-Based Blending Method for Image Stitching. Sensors 2024, 24, 4035. https://doi.org/10.3390/s24134035
Chang J, Li Q, Liang Y, Zhou L. SC-AOF: A Sliding Camera and Asymmetric Optical-Flow-Based Blending Method for Image Stitching. Sensors. 2024; 24(13):4035. https://doi.org/10.3390/s24134035
Chicago/Turabian StyleChang, Jiayi, Qing Li, Yanju Liang, and Liguo Zhou. 2024. "SC-AOF: A Sliding Camera and Asymmetric Optical-Flow-Based Blending Method for Image Stitching" Sensors 24, no. 13: 4035. https://doi.org/10.3390/s24134035
APA StyleChang, J., Li, Q., Liang, Y., & Zhou, L. (2024). SC-AOF: A Sliding Camera and Asymmetric Optical-Flow-Based Blending Method for Image Stitching. Sensors, 24(13), 4035. https://doi.org/10.3390/s24134035