





Design and Control of Monolithic Compliant Gripper Using Shape Memory Alloy Wires


Abstract
:1. Introduction
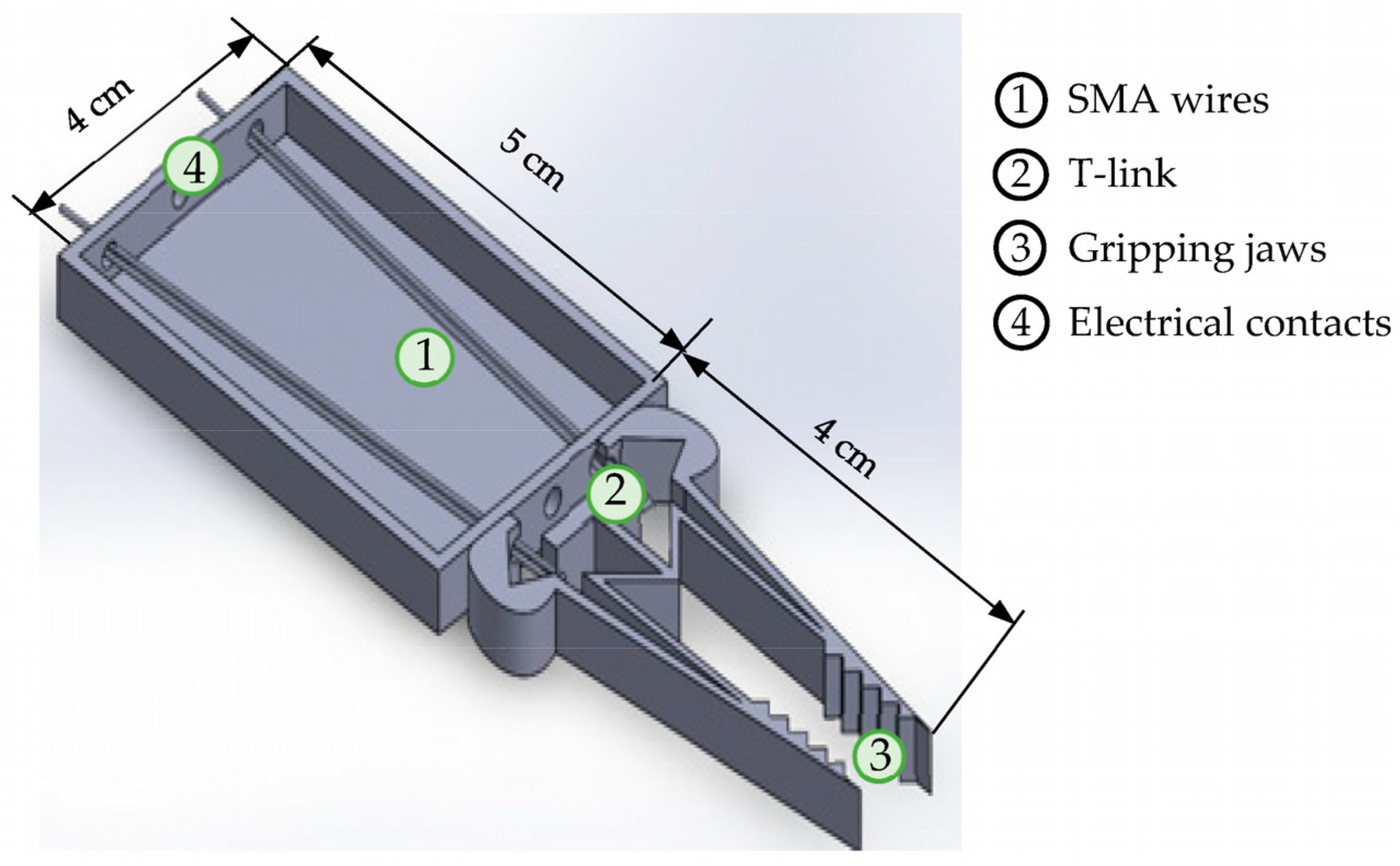
2. Structural Realization of the Gripping Mechanism
3. Analysis of the SMA Wire Integrated Compliant Mechanism
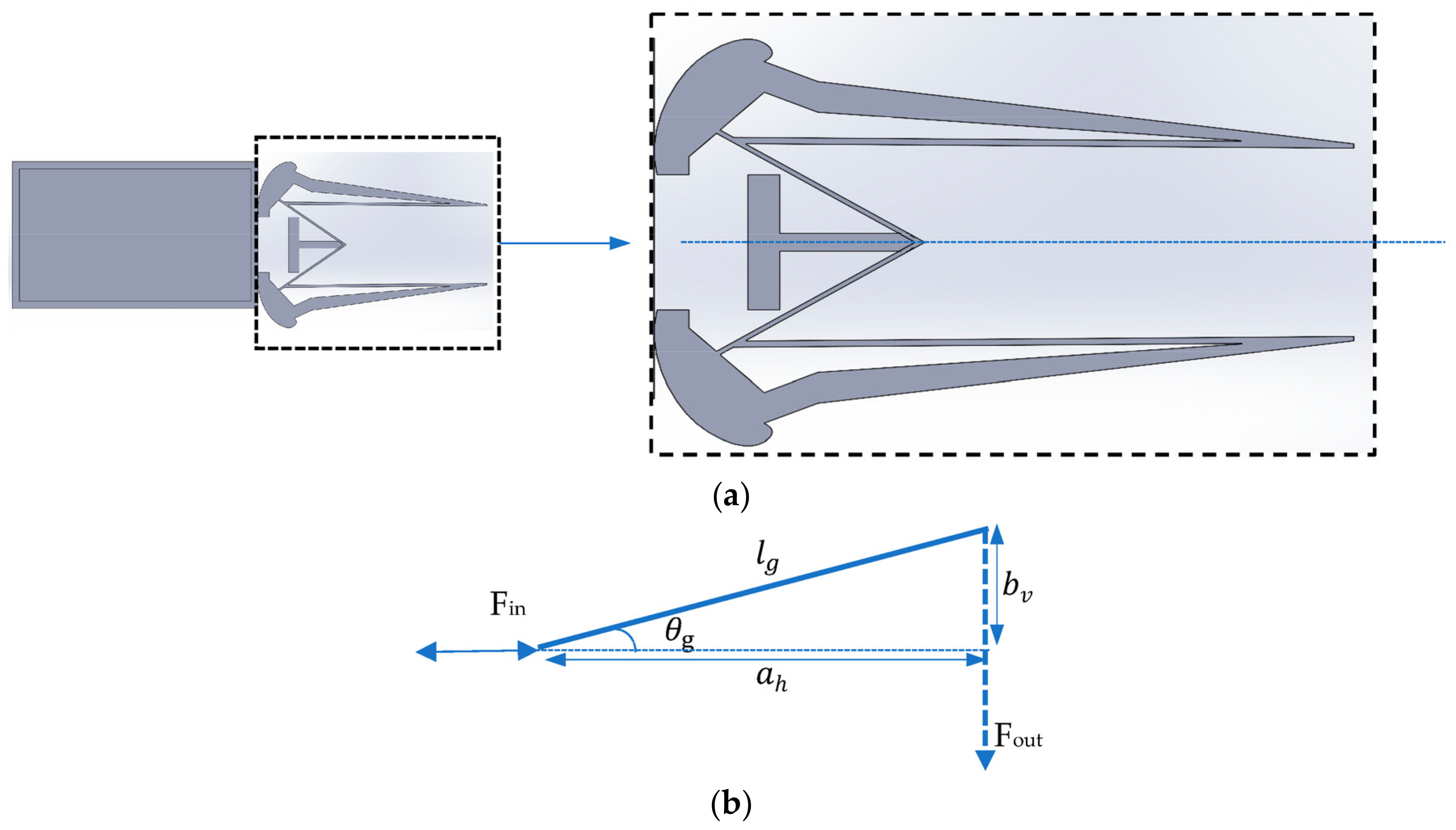
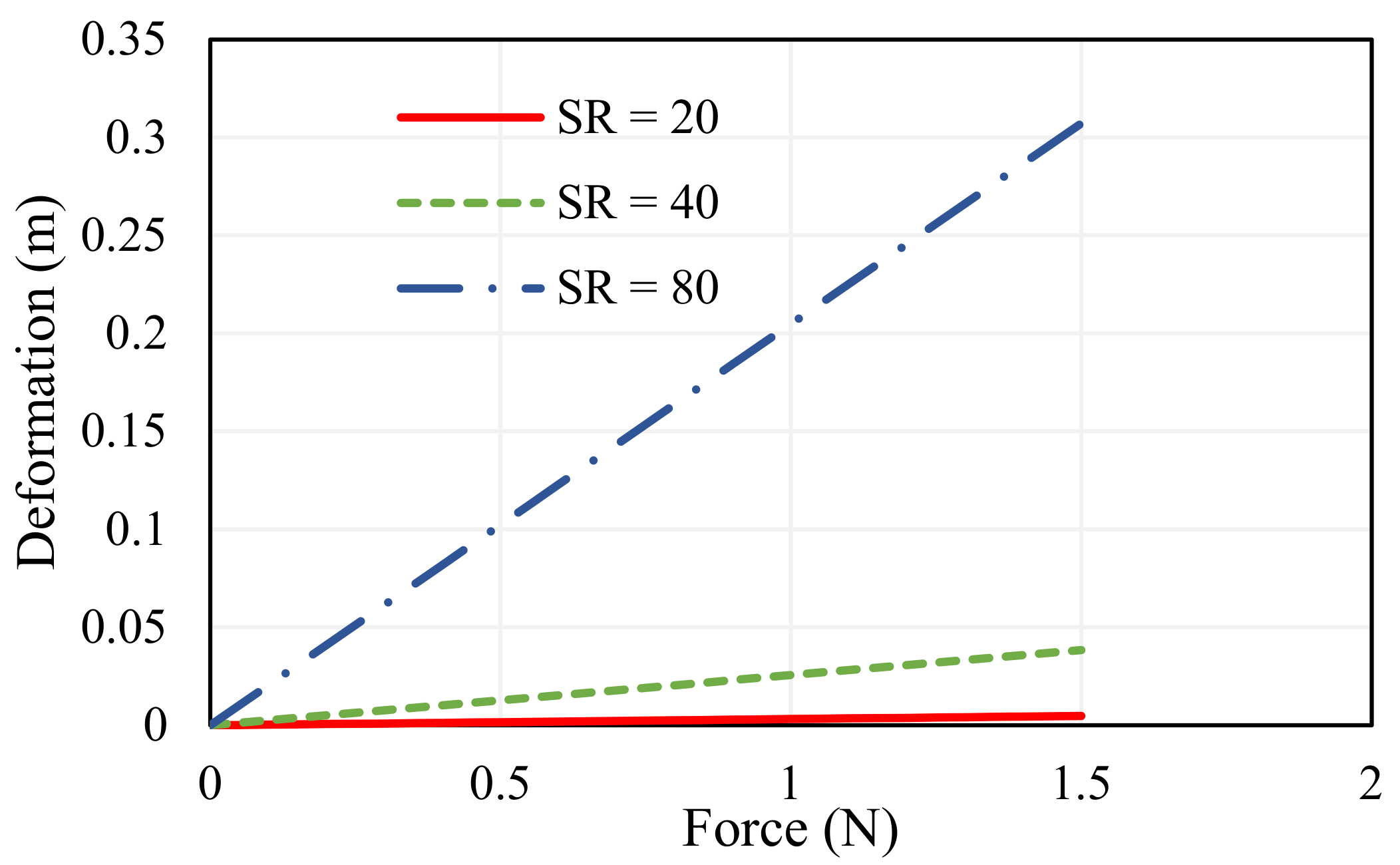
3.1. Mathematical Analysis of the Compliant Structure
3.2. Analysis on the Selection of SMA Wire Actuator
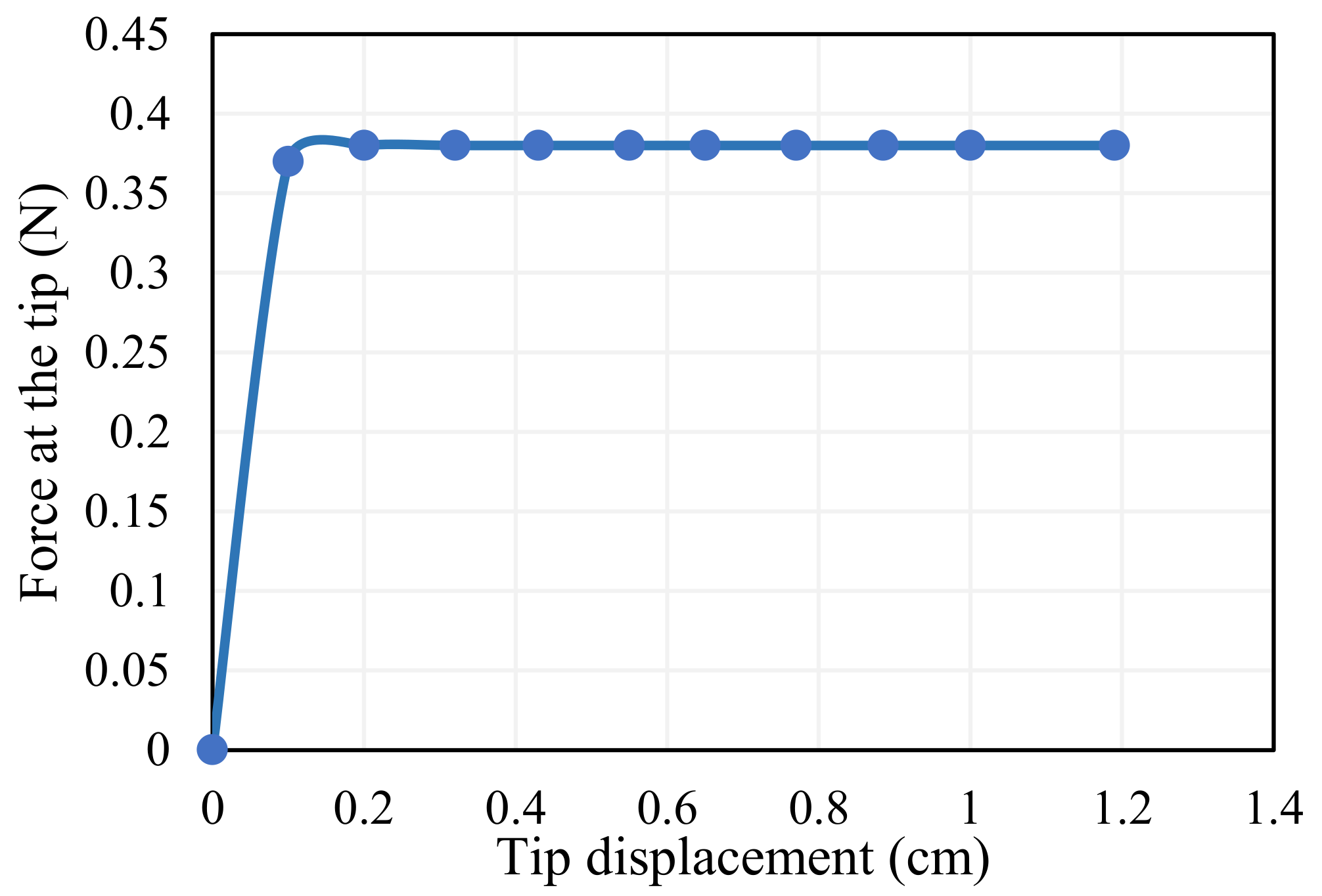
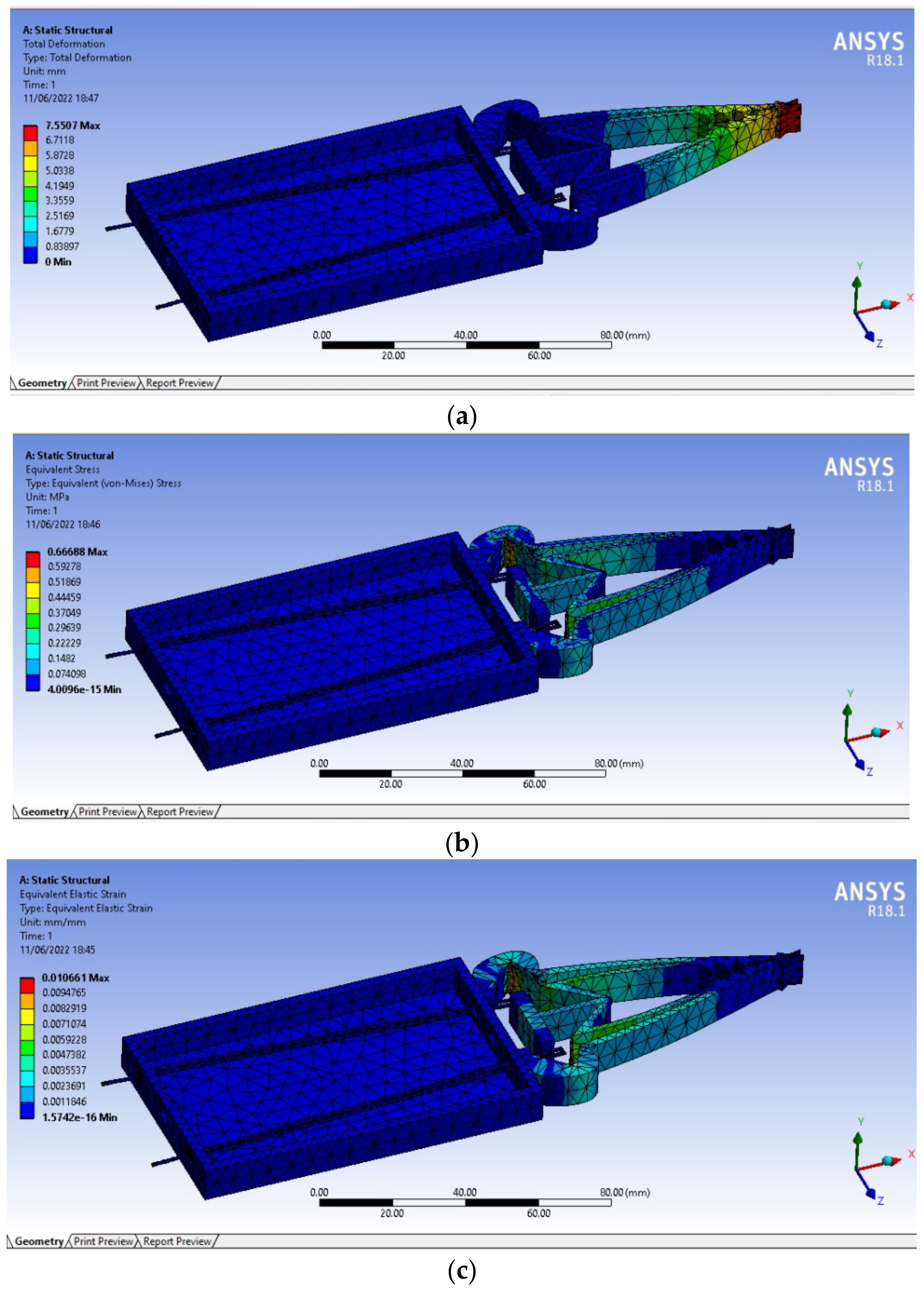
3.3. Analysis Using ANSYS
4. Characteristics of SMA Wire and Compliant Mechanism
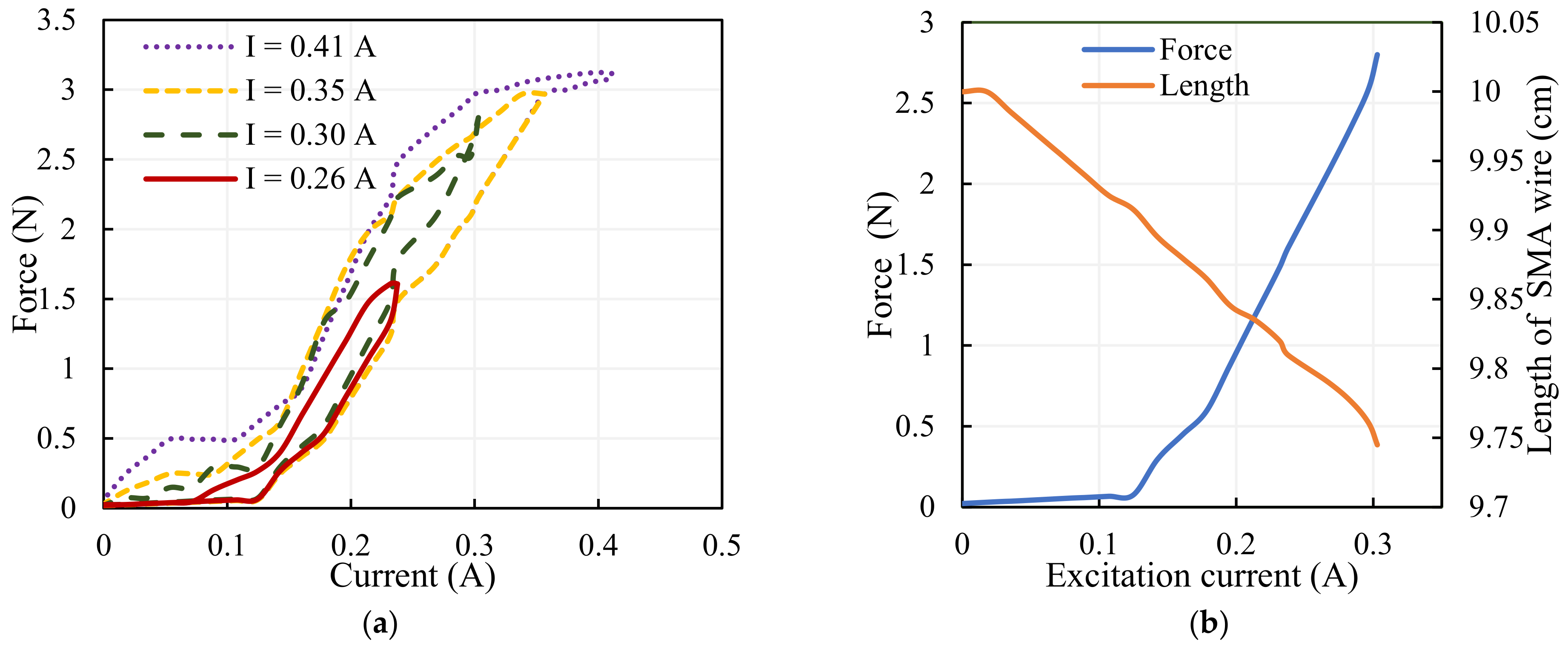
4.1. Characterization of SMA Wire
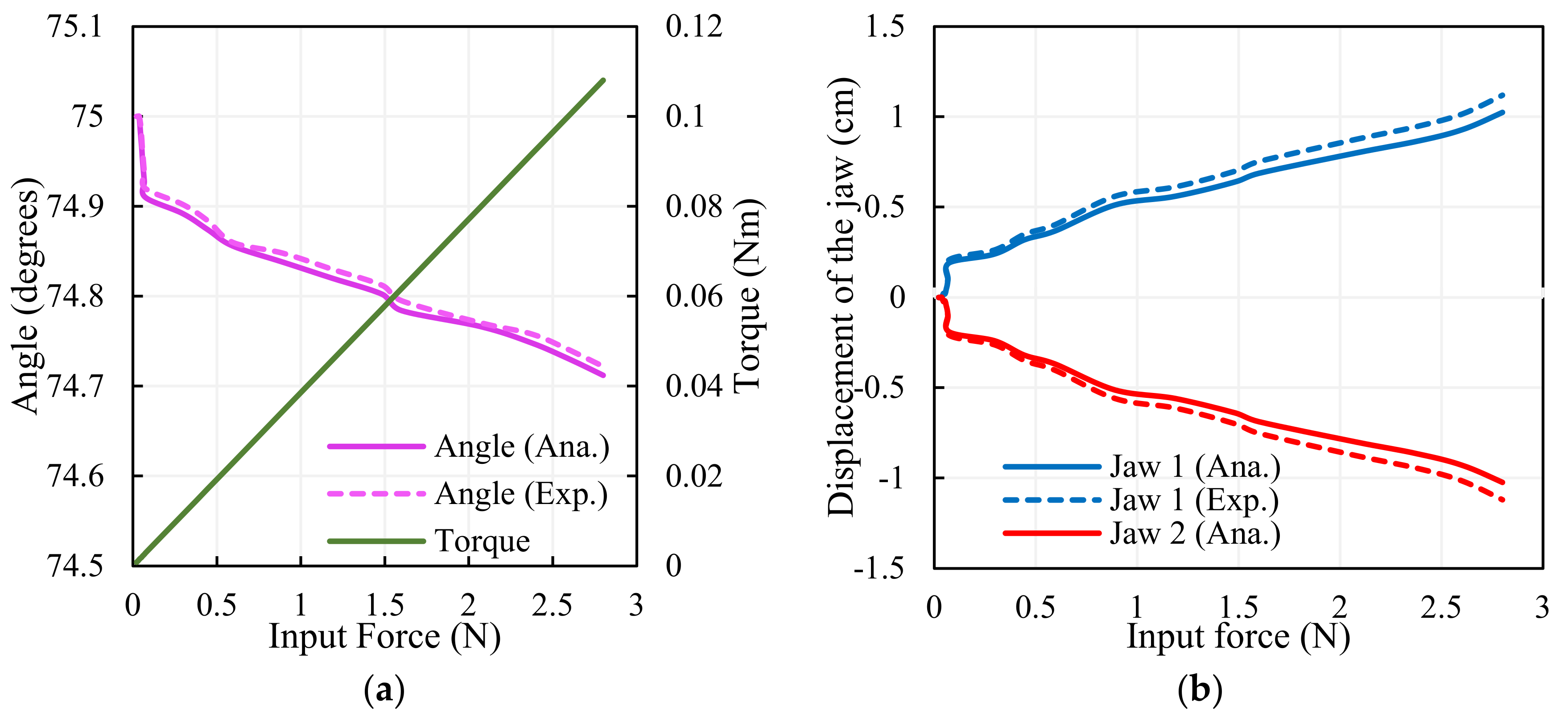
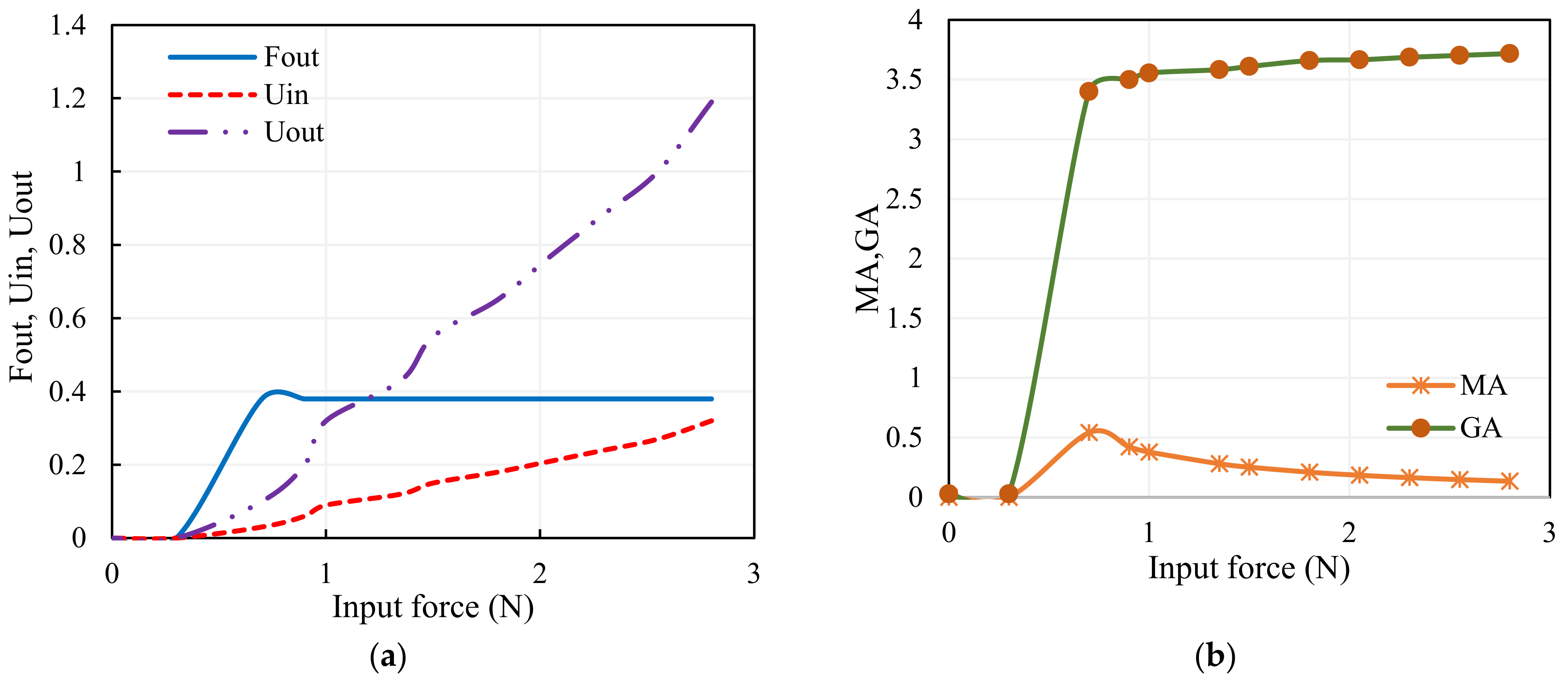
4.2. Characteristic Features of the Compliant Mechanism
5. Principle and Operation of the SMA Gripper
6. Controlled Implementation of the Gripping System
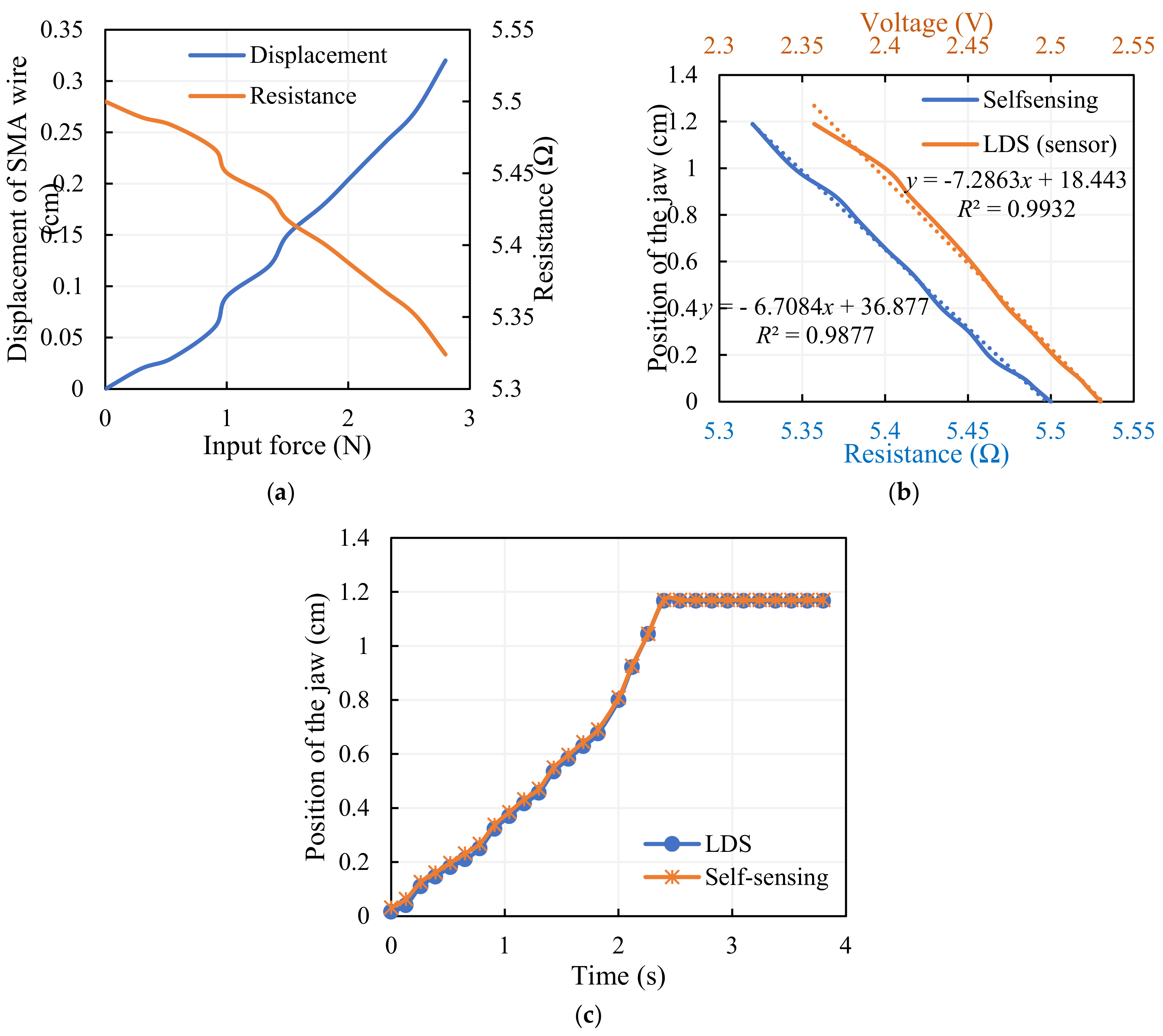
6.1. Self-Sensing Actuation
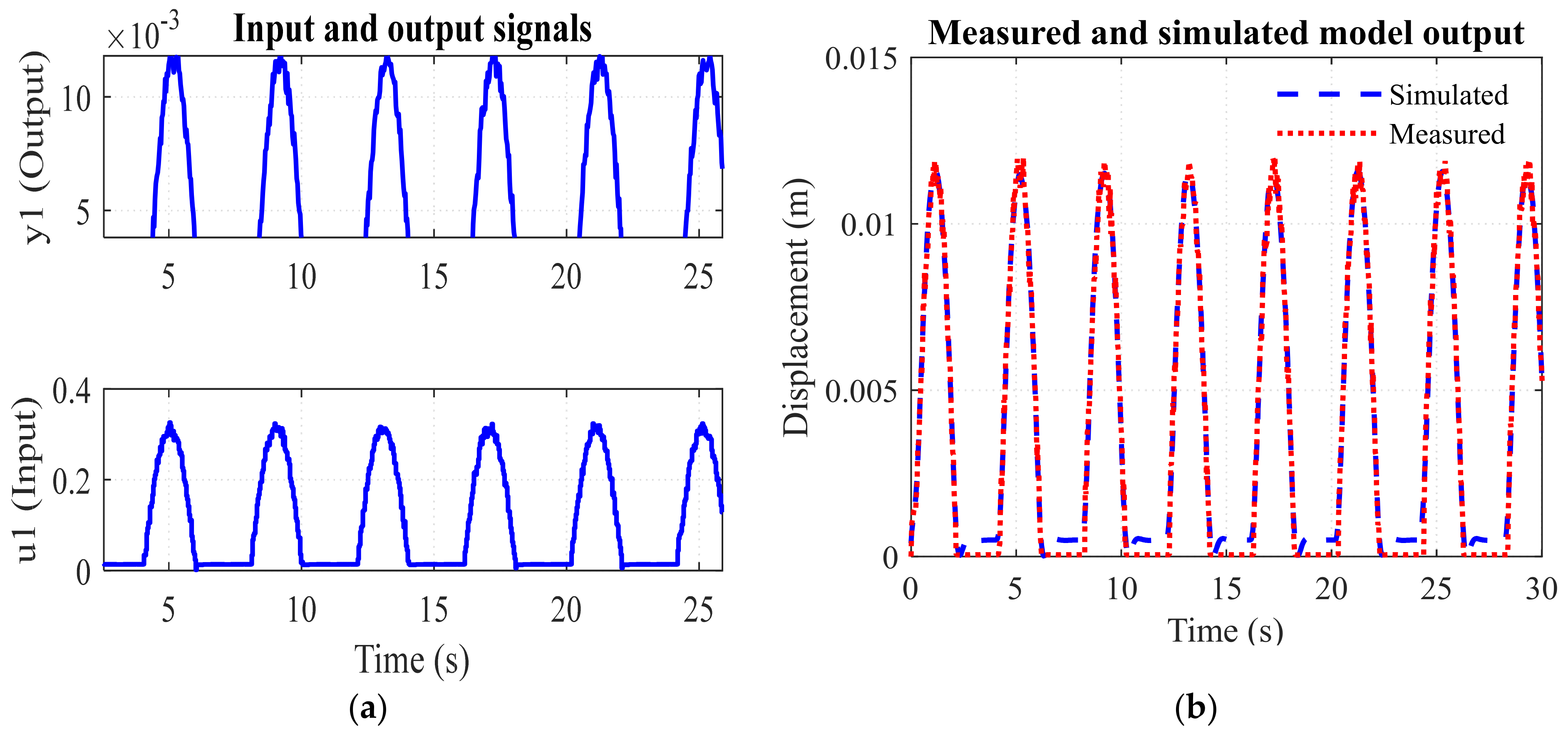
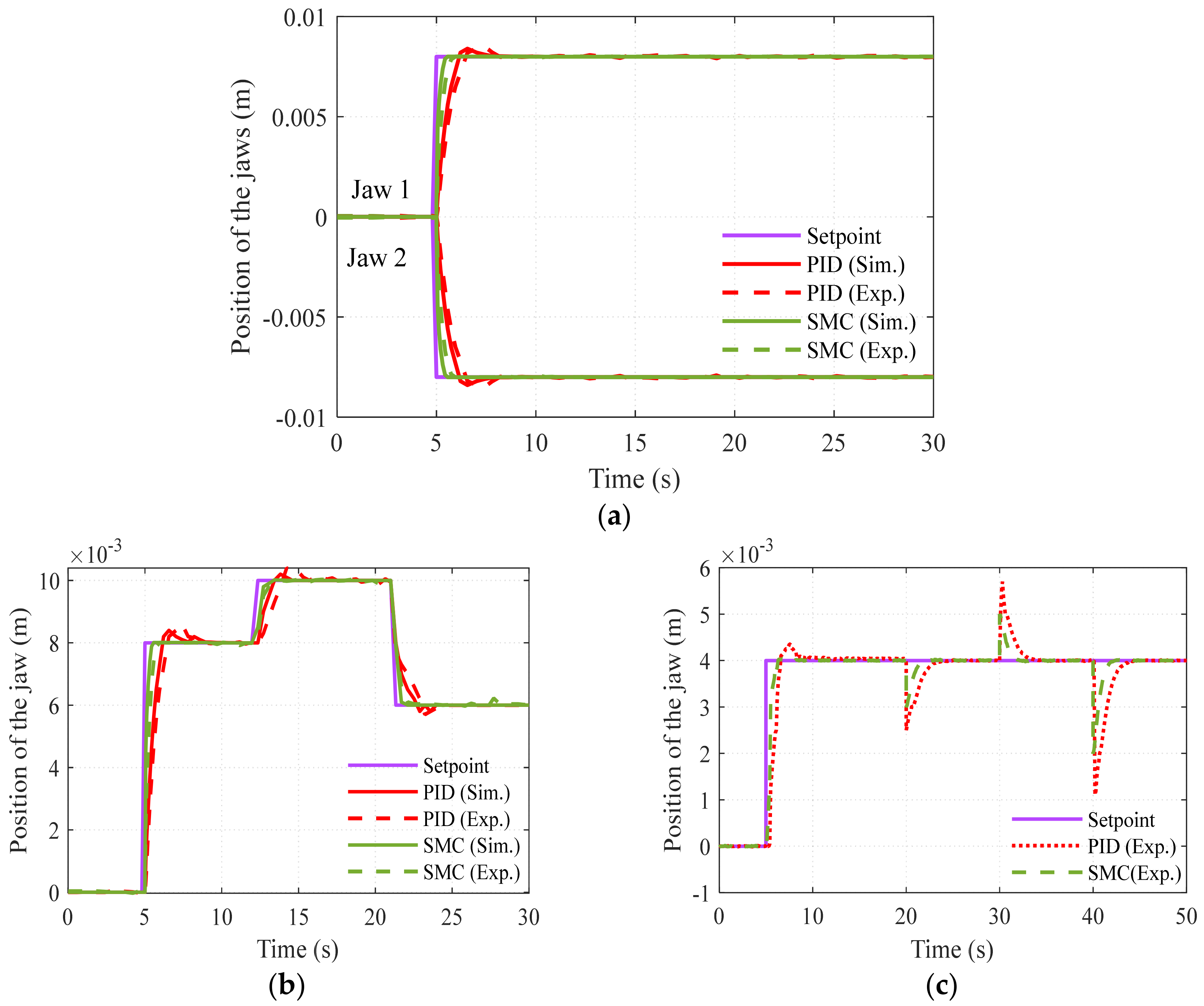
6.2. System Identification and Implementation of Control Strategy
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Choi, H.; Koc, M. Design and feasibility tests of a flexible gripper based on inflatable rubber pockets. Int. J. Mach. Tools Manuf. 2006, 46, 1350–1361. [Google Scholar] [CrossRef]
- Birglen, L.; Schlicht, T. A statistical review of industrial robotic grippers. Robot. Comput. Manuf. 2018, 49, 88–97. [Google Scholar] [CrossRef]
- Zhong, Z.W.; Yeong, C.K. Development of a gripper using SMA wire. Sens. Actuators A Phys. 2006, 126, 375–381. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar]
- Bertetto, A.M.; Ruggiu, M. A two degree of freedom gripper actuated by SMA with flexure hinges. J. Robot. Syst. 2003, 20, 649–657. [Google Scholar] [CrossRef]
- Faridi Rad, N.; Yousefi-Koma, A.; Rezaei, H.; Bazrafshani, M.A. Design and Fabrication of a Gripper Actuated by Shape Memory Alloy Spring. In Proceedings of the 4th International Conference on Robotics and Mechatronics (ICROM), Tehran, Iran, 26–28 October 2016; pp. 455–458. [Google Scholar]
- Chandan, G.K.; Kanchan, B.K.; Premkumar, R.; Karthik, R. Design and experimental analysis of gripper for shape memory alloy actuation. Int. J. Eng. Res. 2016, 5, 236–240. [Google Scholar]
- AbuZaiter, A.; Nafea, M.; Ali, M.S.M. Development of a shape-memory-alloy micromanipulator based on integrated bimorph microactuators. Mechatronics 2016, 38, 16–28. [Google Scholar] [CrossRef]
- Lim, G.; Park, K.; Sugihara, M.; Minami, K.; Esash, M. Future of active catheters. Sens. Actuators A Phys. 1996, 56, 113–121. [Google Scholar] [CrossRef]
- Lee, J.H.; Chung, Y.S.; Rodrigue, H. Long Shape Memory Alloy Tendon-Based Soft Robotic Actuators and Implementation as a Soft Gripper. Sci. Rep. 2019, 9, 11251. [Google Scholar] [CrossRef]
- Li, J.; Yin, H.; Tan, Y. A novel variable stiffness soft finger actuated by shape memory alloy. Int. J. Appl. Electromagn. Mech. 2017, 53, 727–733. [Google Scholar] [CrossRef]
- Rodrigue, H.; Wang, W.; Kim, D.R.; Ahn, S.H. Curved Shape Memory Alloy-based Soft Actuators and Application to Soft Gripper. Compos. Struct. 2017, 176, 398–406. [Google Scholar] [CrossRef]
- Pan, J.; Yu, J.; Pei, X. A novel shape memory alloy actuated soft gripper imitated hand behavior. Front. Mech. Eng. 2022, 17, 44. [Google Scholar] [CrossRef]
- Achilli, G.M.; Logozzo, S.; Valigi, M.C. An Educational Test Rig for Kinesthetic Learning of Mechanisms for Underactuated Robotic Hands. Robotics 2022, 11, 115. [Google Scholar] [CrossRef]
- Dragusanu, M.; Achilli, G.M.; Valigi, M.C.; Prattichizzo, D.; Malvezzi, M.; Salvietti, G. The Wavejoints: A Novel Methodology to Design Soft-Rigid Grippers Made by Monolithic 3D Printed Fingers with Adjustable Joint Stiffness. In Proceeding of the International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 6173–6179. [Google Scholar] [CrossRef]
- Roch, I.; Bidaud, P.; Collard, D.; Buchaillot, L. Fabrication and characterization of an SU-8 gripper actuated by a shape memory alloy thin film. J. Micromech. Microeng. 2003, 13, 330–336. [Google Scholar] [CrossRef]
- Dollar, A.; Howe, R. A robust compliant grasper via shape deposition manufacturing. IEEE/ASME Trans. Mechatron. 2006, 11, 154–161. [Google Scholar] [CrossRef]
- Lee, K.-M. Design criteria for developing an automated live-bird transfer system. IEEE Trans. Robot. Autom. 2001, 17, 483–490. [Google Scholar] [CrossRef]
- Kota, S.; Hetrick, J.; Li, Z.; Saggere, L. Tailoring unconventional actuators using compliant transmissions: Design methods and applications. IEEE/ASME Trans. Mechatron. 1999, 4, 396–408. [Google Scholar] [CrossRef]
- Kim, D.-H.; Kim, B.; Kang, H. Development of a piezoelectric polymer-based sensorized microgripper for microassembly and micromanipulation. Microsyst. Technol. 2004, 10, 275–280. [Google Scholar] [CrossRef]
- Yan, S.; Liu, X.; Xu, F.; Wang, J. A Gripper Actuated by a Pair of Differential SMA Springs. J. Intell. Mater. Syst. Struct. 2006, 18, 459–466. [Google Scholar] [CrossRef]
- Duc, T.C.; Lau, G.-K.; Creemer, J.F.; Sarro, P.M. Electrothermal Microgripper With Large Jaw Displacement and Integrated Force Sensors. J. Microelectromech. Syst. 2008, 17, 1546–1555. [Google Scholar] [CrossRef]
- Lan, C.-C.; Lin, C.-M.; Fan, C.-H. A Self-Sensing Microgripper Module With Wide Handling Ranges. IEEE/ASME Trans. Mechatronics 2010, 16, 141–150. [Google Scholar] [CrossRef]
- Karimi, S.; Konh, B. Self-sensing feedback control of multiple interacting shape memory alloy actuators in a 3D steerable active needle. J. Intell. Mater. Syst. Struct. 2020, 31, 1524–1540. [Google Scholar] [CrossRef]
- Joshi, R.S.; Mitra, A.C.; Kandharkar, S.R. Design and Analysis of Compliant Micro-gripper Using Pseudo Rigid Body Model(PRBM). Mater. Today Proc. 2017, 4, 1701–1707. [Google Scholar] [CrossRef]
- Lagoudas, D.C. Shape Memory Alloys, Modeling and Engineering Applications; Springer Science: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Trimmer, B.A.; Lin, H.-T.; Baryshyan, A.; Leisk, G.; Kaplan, D. Towards a Biomorphic Soft Robot: Design Constraints and Solutions. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Rome, Italy, 24–27 June 2012; pp. 599–605. [Google Scholar]
- Pedersen, C.B.W.; Fleck, N.A.; Ananthasuresh, G.K. Design of a Compliant Mechanism to Modify an Actuator Characteristic to Deliver a Constant Output Force. J. Mech. Des. 2006, 128, 1101–1112. [Google Scholar] [CrossRef]
- Kumar, R.G.; Ananthasuresh, G.K. A Study of Mechanical Advantage in Compliant Mechanisms. In Proceedings of the 1st International and 16th National Conference on Machines and Mechanisms (iNaCoMM2013), Roorkee, India, 18–20 December 2013. [Google Scholar]
- Ruth, D.J.S.; Sohn, J.W.; Dhanalakshmi, K.; Choi, S.B. Control Aspects of Shape Memory Alloys in Robotics Applications: A Review over the Last Decade. Sensors 2022, 22, 4860. [Google Scholar] [CrossRef]
- Ali, H.F.M.; Khan, A.M.; Baek, H.; Shin, B.; Kim, Y. Modeling and control of a finger-like mechanism using bending shape memory alloys. Microsyst. Technol. 2021, 27, 2481–2492. [Google Scholar] [CrossRef]
- Ashrafiuon, H.; Jala, V.R. Sliding mode control of mechanical systems actuated by shape memory alloy. J. Dyn. Syst. Meas. Control. 2009, 131, 1–6. [Google Scholar] [CrossRef]
- Keshtkar, N.; Keshtkar, S.; Poznyak, A. Deflection Sliding Mode Control of a Flexible Bar Using a Shape Memory Alloy Actuator with an Uncertainty Model. Appl. Sci. 2020, 10, 471. [Google Scholar] [CrossRef]
- Slotine, J.-J.E. Sliding controller design for non-linear systems. Int. J. Control. 1984, 40, 421–434. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SMA Wire Actuator | Gripping Arm | ||
|---|---|---|---|
| Material | NiTiNOL | Material | ABS |
| Diameter (m) | 10.15 × 10−3 | Length (m) | 0.04 |
| Length (m) | 0.10 | Width (m) | 0.004 |
| Pull force (N) | 3.14 | Thickness (m) | 0.001 |
| Density (kg/m3) | 6450 | Density (kg/m3) | 1000 |
| Resistance (Ω/m) | 55 | Stiffness (N/m) | 31.25 |
| Transition temperature (°C) | 70 | Young’s modulus (GPa) | 2 |
| Controller | Kp | Ki | Kd | ||
|---|---|---|---|---|---|
| PID | 1.1 | 1.4 | 0.2 | - | - |
| SMC | - | - | - | 0.634 | 500 |
| Performance | PID | SMC |
|---|---|---|
| Rise time (s) | 1.5 | 0.61 |
| Settling time (s) | 2.4 | 0.78 |
| Peak overshoot (%) | 3.75 | 0 |
| Steady state error | 0.023 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Then Mozhi, G.; Dhanalakshmi, K.; Choi, S.-B. Design and Control of Monolithic Compliant Gripper Using Shape Memory Alloy Wires. Sensors 2023, 23, 2052. https://doi.org/10.3390/s23042052
Then Mozhi G, Dhanalakshmi K, Choi S-B. Design and Control of Monolithic Compliant Gripper Using Shape Memory Alloy Wires. Sensors. 2023; 23(4):2052. https://doi.org/10.3390/s23042052
Chicago/Turabian StyleThen Mozhi, Ganapathy, Kaliaperumal Dhanalakshmi, and Seung-Bok Choi. 2023. "Design and Control of Monolithic Compliant Gripper Using Shape Memory Alloy Wires" Sensors 23, no. 4: 2052. https://doi.org/10.3390/s23042052
APA StyleThen Mozhi, G., Dhanalakshmi, K., & Choi, S.-B. (2023). Design and Control of Monolithic Compliant Gripper Using Shape Memory Alloy Wires. Sensors, 23(4), 2052. https://doi.org/10.3390/s23042052