Abstract
This paper proposes a time- and event-triggered hybrid scheduling for remote state estimation with limited communication resources. A smart sensor observes a physical process and decides whether to send the local state estimate to a remote estimator via a wireless communication channel; the estimator computes the state estimate of the process according to the received data packets and the known scheduling mechanism. Based on the existing optimal time-triggered scheduling, we employ a stochastic event trigger to save precious communication chances and further improve the estimation performance. The minimum mean-squared error (MMSE) state estimate is derived since the Gaussian property is preserved. The estimation performance upper bound and communication rate are analyzed. The main results are illustrated by numerical examples.
1. Introduction
In the last two decades, control systems utilizing wireless networks have seen extensive application due to the rapid and advanced development of sensing, information processing, and communication technologies. They have been extensively applied in industry manufacturing, target tracking and localization, smart grid, automobiles, and unmanned aerial vehicles [1,2,3,4,5].
In practical applications, the majority of sensors rely on battery power, and the replacement of batteries can be both expensive and time-consuming. This issue becomes even more challenging in extreme environments where battery replacement may be impossible. Additionally, the limited bandwidth of wireless communication poses another constraint. Therefore, the scheduling of sensor transmissions becomes a crucial concern in addressing these challenges. One direction is the time-triggered scheduling approach. For example, Savage and La Scala [6] investigated the sensor scheduling for Gauss–Markov systems, and simple index policies were proved to be optimal. Shi et al. [7] studied the two-sensor scheduling problem and constructed an optimal periodic schedule minimizing the estimation error and satisfying the energy and communication bandwidth constraints. Yang and Shi [8] provided an explicit form of the optimal sensor data scheduling with limited communication resources during a finite time horizon. Wang et al. [9] proposed an energy-aware sensor scheduling for target surveillance applications. Usually, such scheduling approaches are well designed in advance, i.e., sensors periodically transmit their data at fixed intervals, regardless of the significance or relevance of the information being transmitted. This can lead to inefficient resource usage, especially when the data being transmitted remain unchanged or are not significant.
In contrast, event-triggered scheduling operates based on the occurrence of specific events or conditions. Instead of transmitting data at fixed intervals, sensors only transmit data when certain predefined events or conditions are met. These events or conditions can be based on thresholds, changes in data values, or other predefined triggers. By transmitting data only when necessary, event-triggered scheduling can significantly reduce the amount of communication required and conserve sensor resources such as battery power and network bandwidth. In the context of remote state estimation, Wu et al. [10] proposed a deterministic event trigger based on the transformed innovation term and an approximate estimator was derived. Han et al. [11] proposed a stochastic event trigger and investigated the state estimation performance. Hu et al. [12] designed a recursive event-triggered state estimation with randomly switching topologies and multiple missing measurements. Wang and Liu [13] further investigated the event-triggered state estimation against denial-of-service (DoS) attacks. Yan et al. [14] proposed a novel adaptive memory-event-triggered mechanism to choose the control signals. For networked nonlinear interconnected systems, Gu et al. [15] provided an adaptive event-triggered scheme and derived the sufficient conditions for stability. Overall, event-triggered scheduling offers a promising approach to optimize the utilization of real-time information, guarantee the system performance, and conserve sensor communication resources. In addition to scheduling, the associated state estimation is also quite important. Sinopoli et al. [16] examined the estimation performance in relation to the measurement packet arrival rate when random packet dropouts occur. Malyavej and Savkin [17] quantized the measurement for a digital communication channel with bit-rate limits and created an encoder and decoder pair to achieve the optimal state estimation via a channel with restricted capacity. Furthermore, Wang et al. [18] investigated the variance-constrained robust estimation in the presence of random delays and packet dropouts in the channel with restricted communication capacity. However, it is worth noting that the communication capacity constraint in the aforementioned works primarily focuses on the transmission bit. In contrast, our work aims to make transmission decisions based on real-time information. Even when the sensor chooses not to transmit, the remote estimator can utilize the sensor’s behavior to extract additional information and enhance estimation performance.
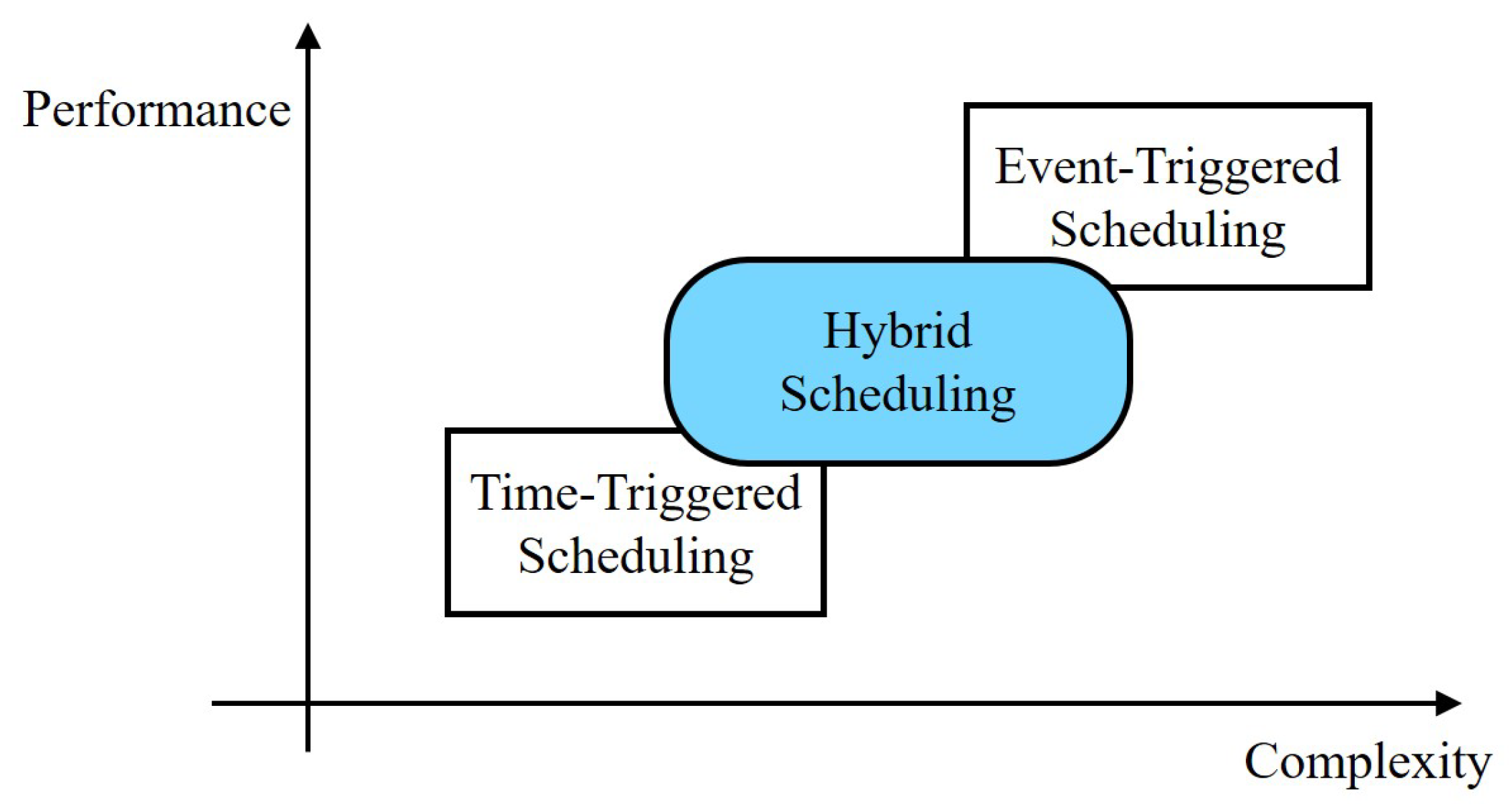
In this paper, we propose a hybrid time- and event-triggered scheduling approach, which keeps the simplicity of time-triggered scheduling and also further exploits the real-time measurement information to improve communication utilization through the event-triggered mechanism, as shown in Figure 1. Based on the optimal periodic time-triggered scheduling, a stochastic event trigger is employed to check the significance of the measurement and decide whether to transmit it.
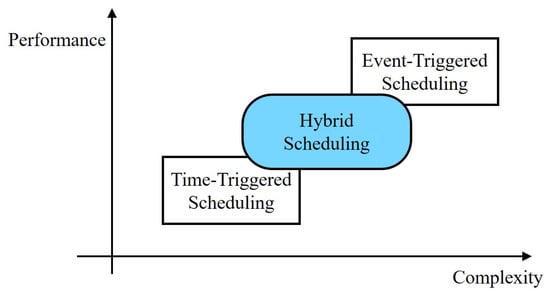
Figure 1.
The hybrid scheduling provides a trade-off between the time-triggered scheduling and event-triggered scheduling in terms of computation complexity and state estimation quality.
The main contributions of this work are summarized as follows.
- In this work, we develop a hybrid scheduling for remote state estimation with a smart sensor. We combine a stochastic event trigger with an optimal periodic time trigger to enhance the estimation performance while preserving the communication rate.
- Under the proposed hybrid scheduling, the Gaussian property of the state estimator is preserved, and we derive the MMSE state estimator. To the best of our knowledge, it is the first time that an MMSE state estimator has been developed for the combination of a stochastic event trigger and an optimal periodic time trigger.
- For the proposed hybrid scheduling, we provide the upper bound of the state estimation error covariance. Moreover, for the stable system, we characterize the transmission probability at the scheduled time, which is decided by the original optimal time trigger. The stochastic transmission implies the communication resource preservation brought by the stochastic event trigger.
The remainder of this paper is organized as follows. Section 2 introduces the setup of the scheduling and remote estimation. The problem of interest is proposed. Section 3 provides the main theoretical results. The time- and event-triggered scheduling is proposed, and its performance is analyzed. Section 4 provides simulations and interpretations. Section 5 draws conclusions.
Notations: is the set of positive integers. is the time index. denotes the set of real numbers. is the n-dimensional Euclidean space. () is the set of positive semi-definite (definite) matrices. When (), we simply write (). The identity matrix with size n is represented by . The superscript , , , and stand for the transpose, trace, determinant, and spectral radius of a matrix, respectively. is the probability of a random variable. denotes the expectation of a random variable, and denotes the conditional expectation. denotes a Gaussian distribution with the mean and covariance . For functions and , is defined as and is defined as with . For , denotes the largest integer less than or equal to x. The -norm of a vector is denoted by .
2. Preliminaries
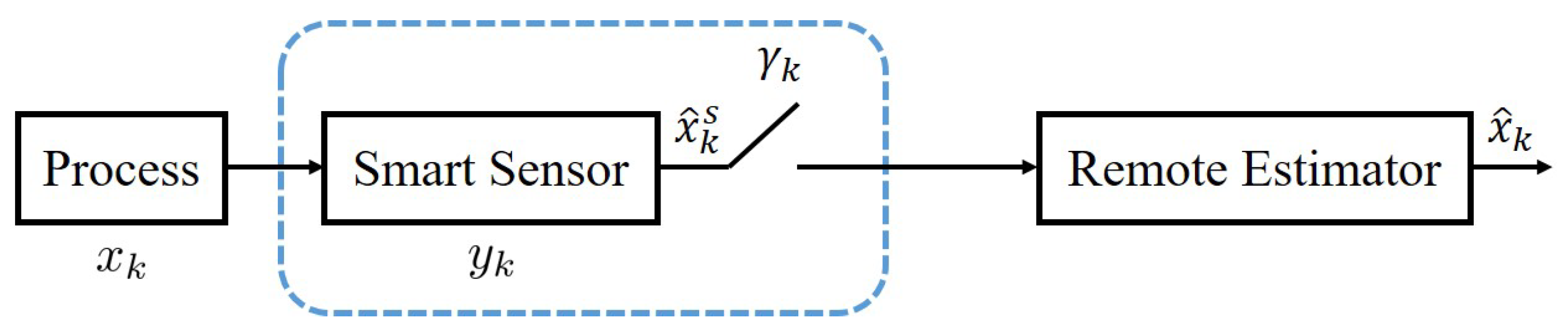
Consider a system as illustrated in Figure 2. A physical process, a smart sensor, and a remote estimator are involved. In this section, we present the mathematical model of the process and smart sensor. For general scheduling approaches, the estimation process is introduced. The scheduling problem under limited communication resources is provided.
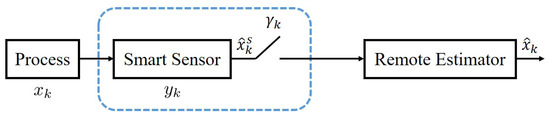
Figure 2.
Traditional system diagram.
2.1. Process and Smart Sensor
A discrete-time linear time-invariant (LTI) process is as follows:
where is the process state at time k, and is an i.i.d. zero-mean Gaussian noise with covariance . A smart sensor observes the process and obtains a measurement, , at time k:
where and is another i.i.d. zero-mean Gaussian noise with covariance . The process noise, , the measurement noise, , and the initial state, , are mutually uncorrelated. The pair is assumed to be controllable, and is observable.
Furthermore, the smart sensor has certain computation capabilities and is capable of running a local Kalman filter based on the collected measurements. Its MMSE state estimate, , and the corresponding error covariance, , are denoted as
where is the information set of the smart sensor at time k. They are computed via a Kalman filter as follows:
where and are the a priori state estimate and the associated estimation error covariance. The recursion begins from and . From [19], the estimation error covariance of the Kalman filter converges to a unique value, , no matter what the initial value is. For presentation brevity, we denote the operators as
We assume that both the a priori and a posteriori error covariances at the smart sensor have already reached the steady states, and let
where is the unique positive semi-definite solution to and is the unique positive semi-definite solution to . This results in a steady-state local Kalman filter with a fixed gain, .
2.2. Transmission with Limited Communication Resources
The smart sensor transmits its local estimate, , to the remote estimator via a wireless communication channel. However, in the implementation of a wireless network, sensors are often impossible to recharge; meanwhile, the data transmission usually consumes most of the sensor power. Hence, the transmission chances of the sensors are limited and scarce. We assume that the smart sensor has, at most, times available to communicate with the remote estimator during a finite time horizon, , where . The smart sensor needs to decide at which time instances to transmit the local estimates. The indicator variable is used to denote the transmission. If the local state estimate, , is transmitted at time k, ; otherwise, .
2.3. Remote Estimator
Based on the received data packets, the remote estimator computes the MMSE state estimate, , and this and the corresponding estimation error covariance are defined as
where is the information set of the remote estimator at time k. They follow the recursion [20]:
The initial values are and .
2.4. Problem of Interest
We consider a sensor scheduling problem in the context of remote state estimation. The purpose is to minimize the average state estimation error covariance during a finite time horizon, as follows:
We aim to propose a time- and event-triggered hybrid sensor scheduling policy under the communication resource constraint .
3. Time- and Event-Triggered Hybrid Sensor Scheduling
In this section, we attempt to sufficiently utilize the limited communication chances to optimize the estimation performance of the remote estimator. First, we present the optimal pure time-triggered scheduling and then the stochastic event-triggered mechanism. Finally, we combine both scheduling policies and propose a hybrid approach to further improve the estimation performance.
3.1. Optimal Time-Triggered Scheduling
Before providing the optimal time-triggered scheduling, we define some necessary variables and parameters. For each transmission policy satisfying , we define a transmission time index sequence , where and is the time instance when . Let , and , . Define and . The optimal time-triggered scheduling is presented by the following theorem [21,22].
Lemma 1.
A necessary and sufficient condition for the scheduling policy to be optimal is that and the associated ’s satisfy
Furthermore, among all the ’s, N of them are equal to , and of them are equal to M. The corresponding state estimation error covariance is
Proof
(Proof of Lemma 1). See Theorem 3.2 in [22]. □
Remark 1.
The intuitive representation of Lemma 1 is that the transmission times of the sensor should be distributed as uniformly as possible.
3.2. Stochastic Event-Triggered Scheduling
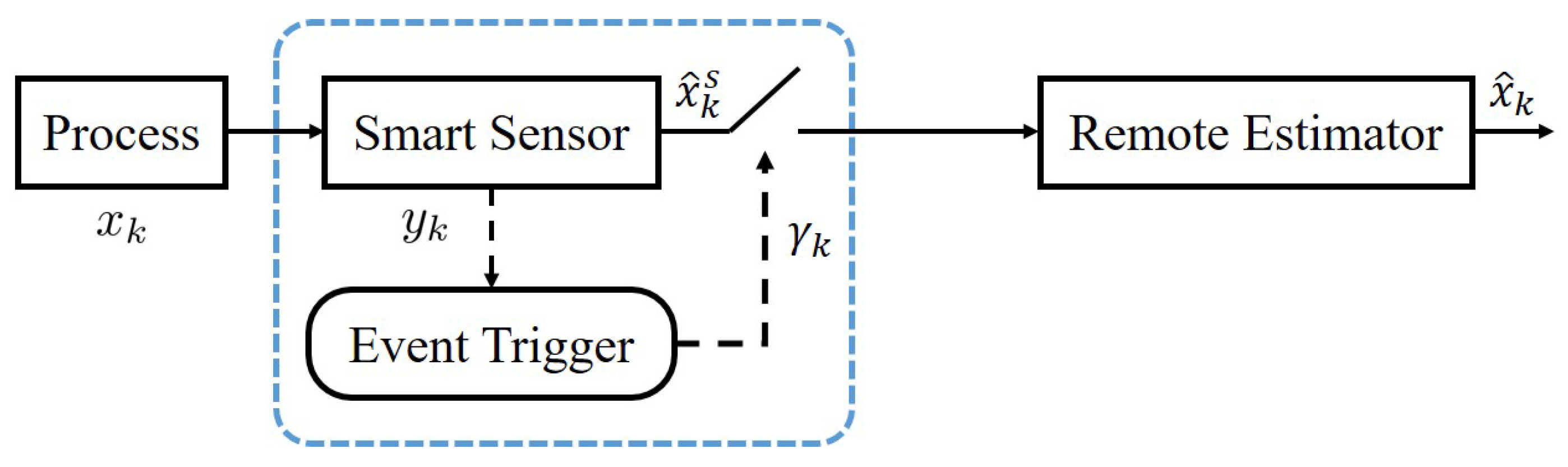
The time-triggered scheduling policy is offline, which means it is designed before the process operation and consequently is unable to use real-time information. We attempt to employ an online scheduling policy where the smart sensor follows a stochastic decision rule, aiming to further save communication resources. Before combining both scheduling policies, we introduce the real-time event-triggered scheduling policy, as shown in Figure 3.
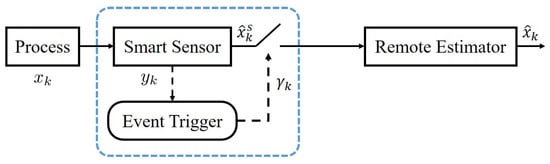
Figure 3.
Scheduling with an event trigger.
Generally, the event-triggered scheduling means that the smart sensor transmits the data packet only when a triggering condition is satisfied. For example, , where and are pre-specified, is a usually deployed condition. Under this event-triggered mechanism, when the condition is met at time k, the smart sensor does not need to transmit , which saves the communication resource. Meanwhile, although not receiving , the remote estimator knows that is around the value b and could compute a better state estimate rather than simply carrying out the time update . This is called a deterministic trigger. However, these kinds of triggering conditions cause a truncated probability density function at the remote estimator side [10,21,23], and the MMSE state estimates cannot preserve the Gaussian property anymore. Consequently, the Kalman filtering procedure cannot provide an MMSE estimation performance.
To address this problem, we propose a stochastic event trigger. In the stochastic event-triggered mechanism, the smart sensor generates an i.i.d. random variable, , following a uniform distribution over at time k. Then, the smart sensor compares with the value of . The function , and is given by
where and are given parameters. The triggering condition is described as follows:
Remark 2
(The stochastic event trigger). The triggering condition is stochastic. Similar event triggers are proposed in [11,24]. This trigger has the same purpose as the truncated one: if the value of is closer to b, the result of is closer to 1, and consequently, the condition is more likely to be triggered. The intuitive interpretation of the mechanism is that once the estimator does not receive any data packet at the pre-scheduled time instance k, it knows that is close to b. Compared with a deterministic truncated trigger such as , the advantage of using the stochastic trigger is that it simplifies the estimation procedure: it preserves the Gaussian property of the state estimator, which can be found in the succeeding theorem.
Before presenting the main result, we define and as the a priori state estimate and the associated estimation error covariance. Let . The following lemma is also needed, and its proof can be found in the Appendix A.
Lemma 2.
For block matrices and being
where , , and , we let
Then, we have
Theorem 1
(Virtual Sensor). When with a stochastic event trigger (12), at the remote estimator side, conditioned on follows the Gaussian distribution , while conditioned on follows the Gaussian distribution . It is equivalent for the estimator to receive from a virtual sensor, where
and . Correspondingly, the MMSE estimator computes and as follows:
Proof ofTheorem 1.
We prove the argument by mathematical induction. For , since , conditioned on follows , we first focus on the a posteriori estimation process. We assume that for , conditioned on follows , where and . Then, the joint conditional probability density function of and given is
where is the covariance of given :
and
In Equation (23), the second equality holds due to the Bayes’ theorem, and the third equality holds because is conditionally independent of and given . The last equality is directly derived from the induction assumption and the stochastic event trigger condition (12). For in Equation (24), we aim to put the ’s together using the following procedure. Define . Then, it is re-arranged mainly by completing the square.
For notation brevity, we define
To further simplify the above variables, we have
where Equation (29) is derived by the direct product computing of block matrices, as stated in the proof of Lemma 2. Then, based on Lemma 2, Equations (26) and (27) can be re-written as
where Equation (32) is obtained by the matrix inversion lemma. Recalling Equation (25) and Lemma 2, we have
where
Hence, the joint conditional probability density function of and given is
Due to the definition of a probability density function, i.e., its integral equals one, we obtain
which implies that and are jointly Gaussian conditioned on , , and . Then, we can conclude that conditioned on follows a Gaussian distribution, , as Equations (21) and (22) show.
Finally, we consider the a priori estimation process. According to the mathematical induction procedure, we assume that for , conditioned on follows . Then, and , which completes the proof. □
Remark 3.
Theorem 1 reveals that although the smart sensor does not transmit at time k, the remote estimator could compute a more accurate state estimate via Equation (21) instead of the a priori state estimate with the proposed stochastic event-triggered scheduling.
3.3. Hybrid Scheduling
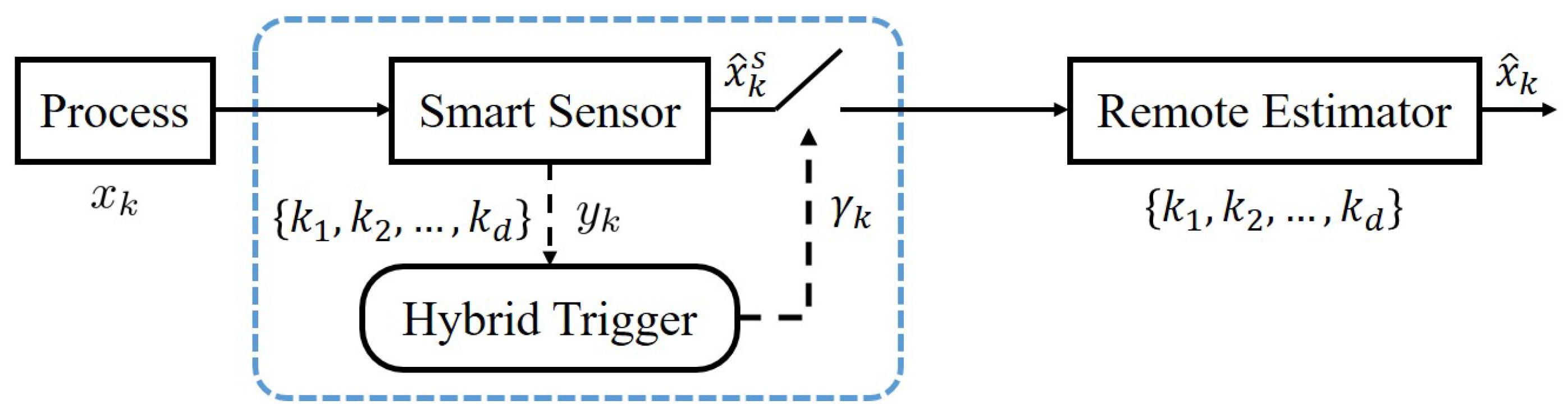
In this subsection, we provide a time- and event-triggered hybrid approach for the sensor scheduling problem, which is illustrated in Figure 4 and summarized in Algorithm 1.
| Algorithm 1 Time- and Event-Triggered Hybrid Sensor Scheduling and Estimation |
|
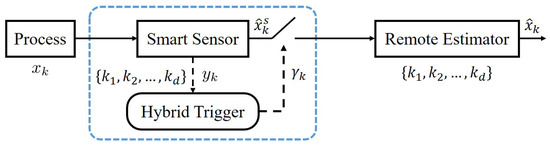
Figure 4.
Hybrid scheduling diagram.
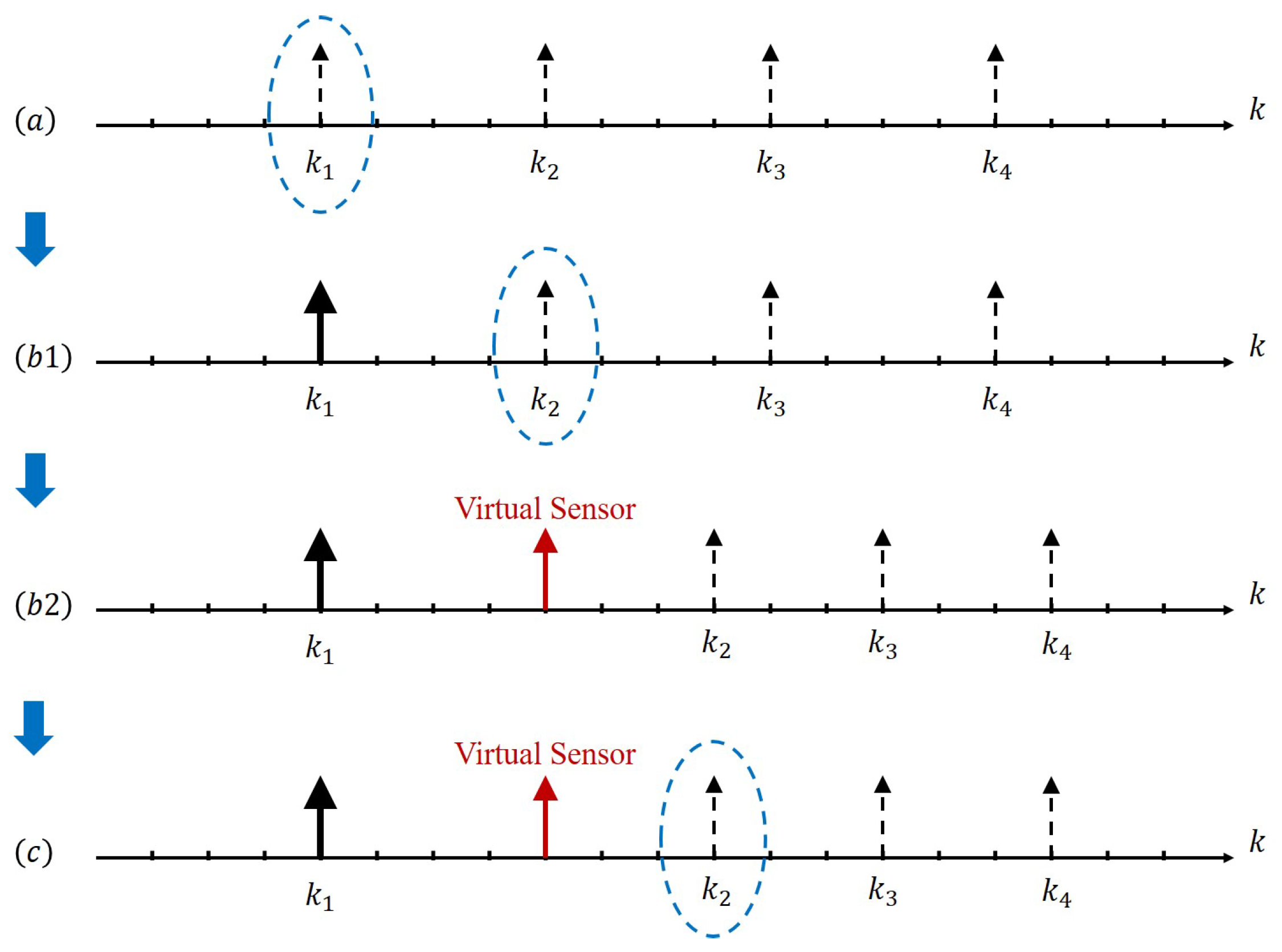
The illustration of Algorithm 1 can be found in Figure 5. The key idea is stated as follows. The smart sensor first follows the optimal time-triggered scheduling and checks the triggering condition at each scheduled transmission time. Once the event trigger works, the transmission of this time is saved for future use, while the remote estimator is equivalent to receiving a measurement from a virtual sensor. Since one chance of transmission is saved, the remaining transmission times are re-scheduled according to the optimal time-triggered scheduling within the remaining time duration.
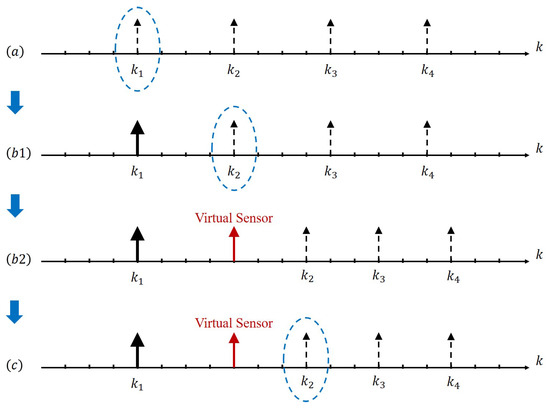
Figure 5.
A realization under the proposed hybrid scheduling for and . (a) The optimal time-triggered scheduling is uniformly distributed. When , check the event triggering condition. (b1) The triggering condition is not satisfied, and the smart sensor transmits . When , again check the event triggering condition. (b2) The triggering condition is satisfied, and a virtual sensor transmission happens. One real transmission chance is saved. The new optimal time-triggered scheduling is obtained. (c) Check the event triggering condition for the following ’s.
3.4. Performance Analysis
In this subsection, we aim to analyze the estimation performance induced by the proposed time- and event-triggered scheduling.
We first define two operators, and , as
When the smart sensor transmits , we have ; when the sensor does not transmit for , we have ; otherwise, we have . During the finite time horizon , the state estimation error covariance at time t is the result brought by t consecutive operators, including r, , and h. For example, is induced by d times the operator r, times the operator , and times the operator h, where . The order of these operators is determined by the implemented scheduling policy. The upper bound of the estimation error covariance is provided as follows.
Theorem 2.
With the time- and event-triggered scheduling proposed in Algorithm 1, the average state estimation error covariance during a finite time horizon, T, is upper bounded by
Proof of Theorem 2.
First, for the affine operator h, we know the following property [25]:
For the operator , we have
and by the error covariance definition.
Then, we consider the state estimation error covariance at the terminal time, which is induced by T operators, as follows
where . We revisit the operators from to . We begin with the terminal operator, . When , for given , there exists according to the inequality (36). Then, we go through the operators in the order . Whenever we find an operator , we replace it by h and obtain a new operator sequence, which consists of times h and d times r. Since is non-decreasing and affine in X, the new operator sequence results in a larger average state estimation error covariance, J. Furthermore, based on Theorem 3.1 in [26], times grouped h would maximize J. As a consequence, J is upper bounded by , which is caused by times the consecutive operator h and d times the operator r. □
Remark 4.
Note that the upper bound will not be achieved with the proposed time- and event-triggered scheduling in Algorithm 1. Even in the worst case, the hybrid scheduling would lead to a better estimation performance.
Moreover, we also investigate the communication rate. Since the real transmissions always happen d times during the time horizon , the communication rate for the whole time duration is . As for each time instance , the probability of transmitting is provided in the following lemma. It is considered for stable systems, i.e., , and we assume that the system has entered the steady state. Then, we have and , where and .
Lemma 3.
When the system is stable, the probability of transmitting for is
Proof of Lemma 3.
From the linearity of the system, is Gaussian distributed with a mean of zero and a covariance of . From the triggering condition, we have
By completing the square, we have
where the equality holds based on the matrix inversion lemma. Since the integral of a Gaussian probability density function equals one, we obtain
which concludes the proof. □
4. Simulation Examples
In this section, we take the linearized discrete-time model of a simplified longitudinal flight system (see [27] for more details) as an example to illustrate the effectiveness of the proposed time- and event-triggered hybrid scheduling. The state variable indicates the pitch angle, the pitch rate, and the normal velocity. The system parameters are as follows:
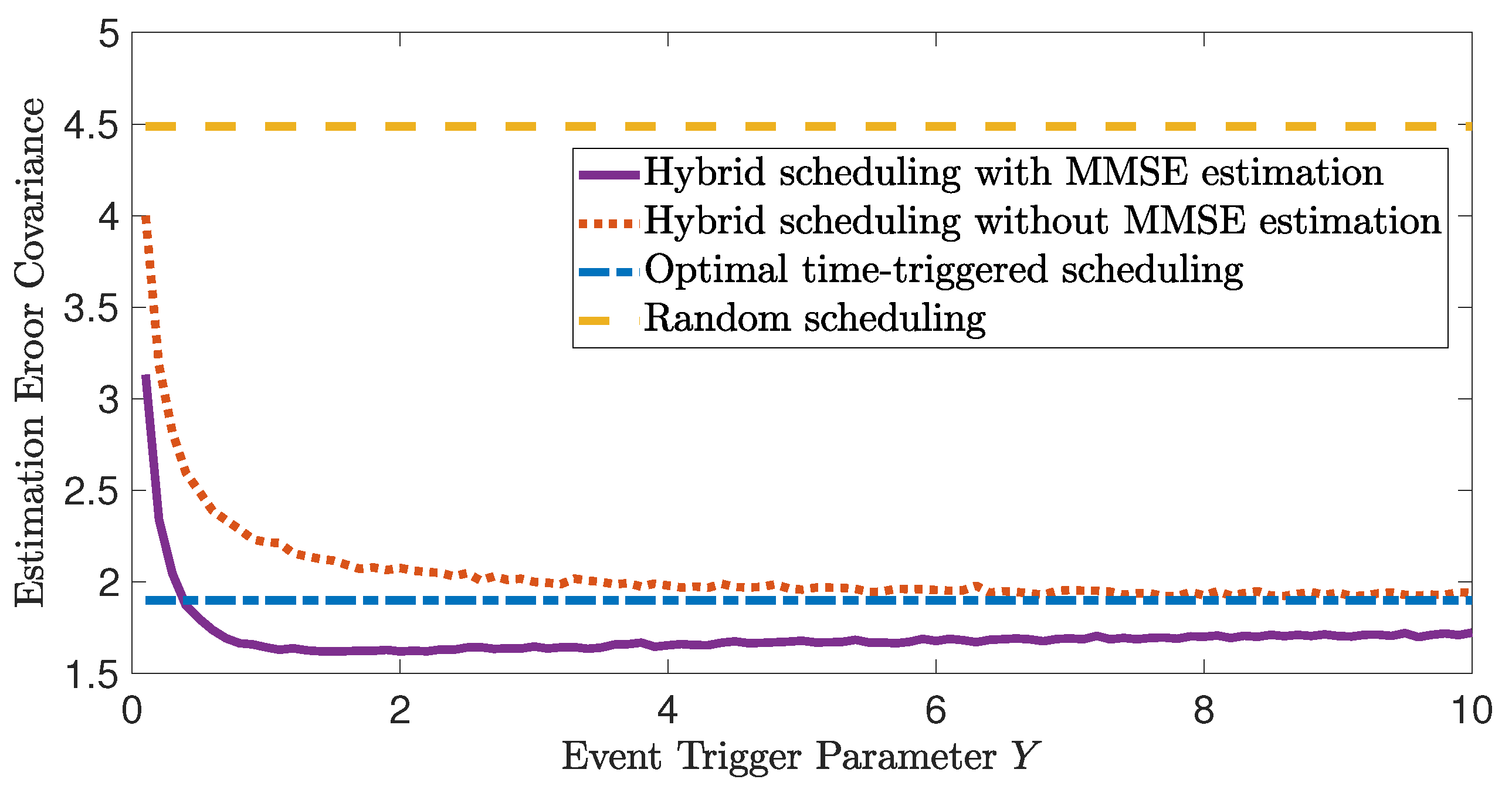
The initial value . We set and the available communication chances as . Then, from the optimal time-triggered scheduling in Lemma 1, one transmission time index sequence is . The associated average state estimation error covariance trace is . As a comparison, we calculate the average estimation error covariance of the random scheduling, which randomly chooses 10 time instances to transmit within the interval . The result is . To examine the performance of the proposed hybrid scheduling (Algorithm 1), we set and let Y take a value in . The average state estimation error covariance trace with respect to the event trigger parameter Y is depicted in Figure 6 with a purple line. As a comparison, the state estimation of the situation where only the time updates (18) and (19) are performed when is plotted with a red dotted line. Since the purple line is generated through the utilization of the proposed MMSE state estimation, it consistently demonstrates superior performance compared to the identical hybrid scheduling approach without MMSE estimation. Note that all of the above-mentioned curves are obtained by running 10,000 simulations. It can be found that when , the proposed hybrid scheduling achieves the best performance, with . In addition, with the increase in Y, the estimation error covariance of the proposed hybrid scheduling decreases first and then approaches the optimal time-triggered scheduling. This is because when Y is small, the result of the triggering condition (12) is always . Then, situations where all of the communication chances are saved until the end of the time interval may happen, which will induce a worse estimation performance compared with the optimal time-triggered scheduling. When Y is large enough, the result of the triggering condition (12) is more likely to be , which is exactly the optimal time-triggered scheduling. When Y is chosen appropriately, the event trigger works and saves the communication resource when the estimation performance is good. The precious transmission chance is allocated for the remaining time interval. Note that the performance upper bound is .
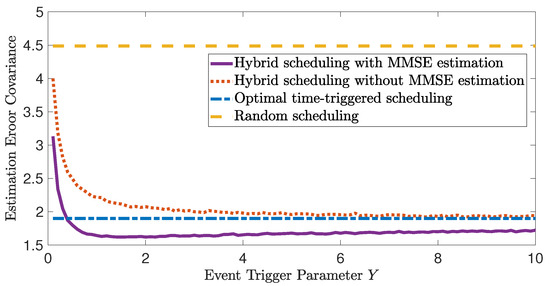
Figure 6.
Illustration of the effectiveness of the hybrid scheduling and MMSE estimation.
5. Conclusions and Future Work
In this paper, we investigated a sensor scheduling problem for the remote state estimation with limited communication resources. Based on the existing optimal time-triggered scheduling, a stochastic event trigger was provided. The MMSE state estimate was derived since the Gaussian property was preserved. Hence, we proposed a hybrid scheduling approach. The estimation performance at the remote estimator was enhanced compared with the time-triggered scheduling under the same communication rate.
With the purpose of extending the finite-time-horizon result, one possible future direction is to investigate the infinite-time-horizon optimization problem with a limited communication rate. Additionally, it would be interesting to investigate the design of the parameters of the event trigger. Parameter optimization problems could be formulated to achieve a better state estimation performance.
Author Contributions
Conceptualization and methodology, Y.N. and C.Y.; software, Y.N.; writing—original draft preparation, Y.N.; writing—review and editing, X.L. and C.Y.; supervision, Y.N. and C.Y.; funding acquisition, Y.N. and C.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China under Grant 62303196, 62336005, and 61973163, the Fundamental Research Funds for the Central Universities, JUSRP122048, the Basic Research Funds of Wuxi Taihu Light Project under Grant K20221005, and the 111 Project under Grant B23008.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. Proof of Lemma 2
Define a block matrix such that , where , , and . Then, we have
Furthermore, there is
By calculating the product of the above three matrices, we have
Similar to the decomposition procedure (A1) for , we have
Combining Equations (A4) and (A5), we obtain
Since , we have , which implies . Hence, for Equation (A3), we have
Again, can be decomposed as follows:
By computing the product of the above three matrices, we obtain
Then, for in Equation (A2), we can further derive
where the second equality holds because of and Equations (A4) and (A6). The third equality results from
which is directly induced by the matrix inversion lemma.
Finally, Equations (A6), (A7) and (A10) are all derived, and the proof is finished.
References
- Hespanha, J.P.; Naghshtabrizi, P.; Xu, Y. A survey of recent results in networked control systems. Proc. IEEE 2007, 95, 138–162. [Google Scholar] [CrossRef]
- You, K.Y.; Xie, L.H. Survey of recent progress in networked control systems. Acta Autom. Sin. 2013, 39, 101–117. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L.; Ge, X.; Ding, D.; Ding, L.; Yue, D.; Peng, C. Networked control systems: A survey of trends and techniques. IEEE/CAA J. Autom. Sin. 2020, 7, 1–17. [Google Scholar] [CrossRef]
- Devan, P.A.M.; Hussin, F.A.; Ibrahim, R.; Bingi, K.; Khanday, F.A. A survey on the application of WirelessHART for industrial process monitoring and control. Sensors 2021, 21, 4951. [Google Scholar] [CrossRef]
- Zhao, S.; Huang, B.; Liu, F. Localization of indoor mobile robot using minimum variance unbiased FIR filter. IEEE Trans. Autom. Sci. Eng. 2018, 15, 410–419. [Google Scholar] [CrossRef]
- Savage, C.O.; La Scala, B.F. Optimal scheduling of scalar Gauss-Markov systems with a terminal cost function. IEEE Trans. Autom. Control 2009, 54, 1100–1105. [Google Scholar] [CrossRef]
- Shi, L.; Cheng, P.; Chen, J. Optimal periodic sensor scheduling with limited resources. IEEE Trans. Autom. Control 2011, 56, 2190–2195. [Google Scholar] [CrossRef]
- Yang, C.; Shi, L. Deterministic sensor data scheduling under limited communication resource. IEEE Trans. Signal Process. 2011, 59, 5050–5056. [Google Scholar] [CrossRef]
- Wang, X.; Wang, S.; Ma, J.; Sun, X. Energy-aware scheduling of surveillance in wireless multimedia sensor networks. Sensors 2010, 10, 3100–3125. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Jia, Q.S.; Johansson, K.H.; Shi, L. Event-based sensor data scheduling: Trade-off between communication rate and estimation quality. IEEE Trans. Autom. Control 2013, 58, 1041–1046. [Google Scholar] [CrossRef]
- Han, D.; Mo, Y.; Wu, J.; Weerakkody, S.; Sinopoli, B.; Shi, L. Stochastic event-triggered sensor schedule for remote state estimation. IEEE Trans. Autom. Control 2015, 60, 2661–2675. [Google Scholar] [CrossRef]
- Hu, J.; Wang, Z.; Liu, G.P.; Jia, C.; Williams, J. Event-triggered recursive state estimation for dynamical networks under randomly switching topologies and multiple missing measurements. Automatica 2020, 115, 108908. [Google Scholar] [CrossRef]
- Wang, M.; Liu, H. Event-triggered robust state estimation for nonlinear networked systems with measurement delays against DoS attacks. Sensors 2023, 23, 6553. [Google Scholar] [CrossRef] [PubMed]
- Yan, S.; Gu, Z.; Park, J.H.; Xie, X. Adaptive memory-event-triggered static output control of T–S fuzzy wind turbine systems. IEEE Trans. Fuzzy Syst. 2022, 30, 3894–3904. [Google Scholar] [CrossRef]
- Gu, Z.; Shi, P.; Yue, D.; Ding, Z. Decentralized adaptive event-triggered H∞ filtering for a class of networked nonlinear interconnected systems. IEEE Trans. Cybern. 2019, 49, 1570–1579. [Google Scholar] [CrossRef] [PubMed]
- Sinopoli, B.; Schenato, L.; Franceschetti, M.; Poolla, K.; Jordan, M.I.; Sastry, S.S. Kalman filtering with intermittent observations. IEEE Trans. Autom. Control 2004, 49, 1453–1464. [Google Scholar] [CrossRef]
- Malyavej, V.; Savkin, A.V. The problem of optimal robust Kalman state estimation via limited capacity digital communication channels. Syst. Control Lett. 2005, 54, 283–292. [Google Scholar] [CrossRef]
- Wang, B.; Guo, G.; Gao, X. Variance-constrained robust estimation for discrete-time systems with communication constraints. Math. Probl. Eng. 2014, 2014, 980753. [Google Scholar] [CrossRef]
- Anderson, B.D.; Moore, J.B. Optimal Filtering; Courier Corporation: North Chelmsford, MA, USA, 2012. [Google Scholar]
- Schenato, L. Optimal estimation in networked control systems subject to random delay and packet drop. IEEE Trans. Autom. Control 2008, 53, 1311–1317. [Google Scholar] [CrossRef]
- Shi, L.; Johansson, K.H.; Qiu, L. Time and event-based sensor scheduling for networks with limited communication resources. IFAC Proc. Vol. 2011, 44, 13263–13268. [Google Scholar] [CrossRef]
- Yang, C.; Shi, L.; Ma, W.J. A study of estimation and communication tradeoff using an event-based approach. In Proceedings of the 47th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 3–6 November 2013; pp. 32–36. [Google Scholar]
- Wu, J.; Yuan, Y.; Zhang, H.; Shi, L. How can online schedules improve communication and estimation tradeoff? IEEE Trans. Signal Process. 2013, 61, 1625–1631. [Google Scholar] [CrossRef]
- Han, D.; Mo, Y.; Wu, J.; Sinopoli, B.; Shi, L. Stochastic event-triggered sensor scheduling for remote state estimation. In Proceedings of the 52nd IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013; pp. 6079–6084. [Google Scholar]
- Shi, L.; Epstein, M.; Murray, R.M. Kalman filtering over a packet-dropping network: A probabilistic perspective. IEEE Trans. Autom. Control 2010, 55, 594–604. [Google Scholar] [CrossRef]
- Zhang, H.; Cheng, P.; Shi, L.; Chen, J. Optimal denial-of-service attack scheduling with energy constraint. IEEE Trans. Autom. Control 2015, 60, 3023–3028. [Google Scholar] [CrossRef]
- Chen, J.; Patton, R.J. Robust Model-Based Fault Diagnosis for Dynamic Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 3. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).