1. Introduction
In recent years, location-based services related to daily life and work have been launched [
1]. For large indoor areas, such as factories, hospitals, and shopping malls, the ability to locate moving targets inside them in real time is necessary for purposes such as navigation, surveillance, and business model optimization [
2]. The commonly employed techniques for indoor wireless localization techniques encompass Wi-Fi, radio frequency identification (RFID), ultra-wideband (UWB), long-range radio (LoRa), bluetooth low energy (BLE), and ZigBee, etc. [
3,
4,
5,
6]. The increasing density of Wi-Fi coverage and the widespread adoption of mobile devices equipped with wireless network interface controllers have significantly enhanced the ubiquity of Wi-Fi-based localization technologies, eliminating the need for additional hardware. For Wi-Fi-based localization technology, the wireless access points (APs) are used as the anchor nodes (ANs) to form a wireless sensor network (WSN), and the target is considered as the blind node. The AP measures the radio signal parameters emitted by the target for localization, such as time of arrival (TOA) [
7], time difference of arrival (TDOA) [
8], angle of arrival (AOA) [
9], received signal strength indication (RSSI) [
10], etc. Measuring the target RSSI requires neither clock synchronization nor antenna arrays, and has a lower cost, so RSSI-based localization methods are more promising for application and have received wide attention from scholars [
11].
The RSSI-based localization problem consists in the need to obtain the distance information between the target and AN using the target RSSI samples measured by the ANs, and then obtain the target location estimate with the distance information. The essence of this localization problem is the obtention of the maximum likelihood estimation (MLE) of the target location [
12,
13]. However, this problem is a nonconvex optimization problem with multiple locally optimal solutions. Moreover, the complexity of the indoor Wi-Fi channel leads to drastic fluctuations in the RSSI measured by the ANs, which leads to a reduction in the accuracy of the traditional iterative methods for solving the target location. The search for ways in which RSSI can be effectively used to localize target with superior accuracy has become a hot issue in the field of indoor localization.
To improve the accuracy of the RSSI-based localization, it is necessary to improve the accuracy of the RSSI for the target characterized by AN. RSSI samples measured by the AN are processed, such as mean filter [
14], Kalman filter [
15], Gaussian filter [
16], etc., to reduce the influence of random factors and improve the accuracy of the target RSSI. However, existing methods for treating RSSI do not consider the restriction on the number of RSSI samples. During real-time localization, the number of RSSI samples measured by AN is mostly limited due to the limited frequency of RSSI measurements, which leads to degraded performance of these methods.
For non-convexity of the RSSI-based localization problem, commonly used methods include the convex relaxation method [
17,
18,
19,
20,
21] and objective function approximation method [
22,
23]. The convex relaxation method transforms a nonconvex optimization problem into a convex optimization problem by relaxing the constraints to find a globally optimal solution. Typical convex relaxation methods contain the semidefinite programming (SDP) algorithm [
17], the second-order cone programming (SOCP) algorithm [
20,
21], etc. Despite the better accuracy, the computational complexity of the convex relaxation method is significant. The objective function approximation method approximates the original problem in order to find the global optimal solution of the approximated problem. Typical methods include weighted least squares (WLS) [
22], squared range least squares (SRLS) [
23], etc. Although the objective function approximation method has a relatively simple computational procedure, the approximation procedure introduces additional errors that lead to lower localization accuracy. Existing methods for solving the non-convexity of localization problems fail to balance accuracy and computational complexity at the same time, thus failing to meet the demand for high-precision real-time localization.
To address the localization error and the computational cost caused by RSSI fluctuation and non-convexity of the localization problem during real-time localization, in this paper, an RSSI-based AP cluster localization (APCL) method is proposed for high-precision real-time localization of indoor mobile targets. First, the AP cluster is proposed to form the AN in order to increase the number of RSSI samples measured by a single AN. Then, the optimal RSSI of the target is estimated from the samples measured by AN to reduce the error due to fluctuations. Finally, the MLE problem is constructed as an eigenvalue problem and the global optimal solution can be solved directly and quickly to reduce the error and computational complexity due to non-convexity. The main contributions of this paper are as follows.
- (1)
It is proposed to construct the AN in the form of an AP cluster, and use the AP cluster to obtain multiple RSSI samples of a single AN. The proposed target RSSI estimation method is based on a limited number of RSSI samples, and the optimal RSSI estimation is beneficial to improve the target localization accuracy.
- (2)
A method is proposed to transform the RSSI-based localization problem into an eigenvalue problem, which can well solve the nonconvex problem and obtain the global optimal solution with great accuracy and low computational complexity.
The rest of the paper is organized as follows: In
Section 2, the problem studied in this paper is described. Theoretical analysis on utilizing multiple APs for establishing an AN is presented in
Section 3. The method presented in
Section 4 is used to estimate the optimal RSSI of a target using samples from AP cluster measurements. In
Section 5, a way to transform the MLE problem into an eigenvalue problem is described. The proposed APCL method is summarized in
Section 6. The Cramer–Rao lower bound (CRLB) of the localization method which utilizes the AP cluster to form the AN is analyzed in
Section 7. The computational complexity of the APCL method is analyzed in
Section 8. Several simulations and experimental results are discussed in
Section 9 and
Section 10, respectively. Finally, some conclusions are given for the paper in
Section 11. Key notations are given in
Table 1.
2. Problem Statement
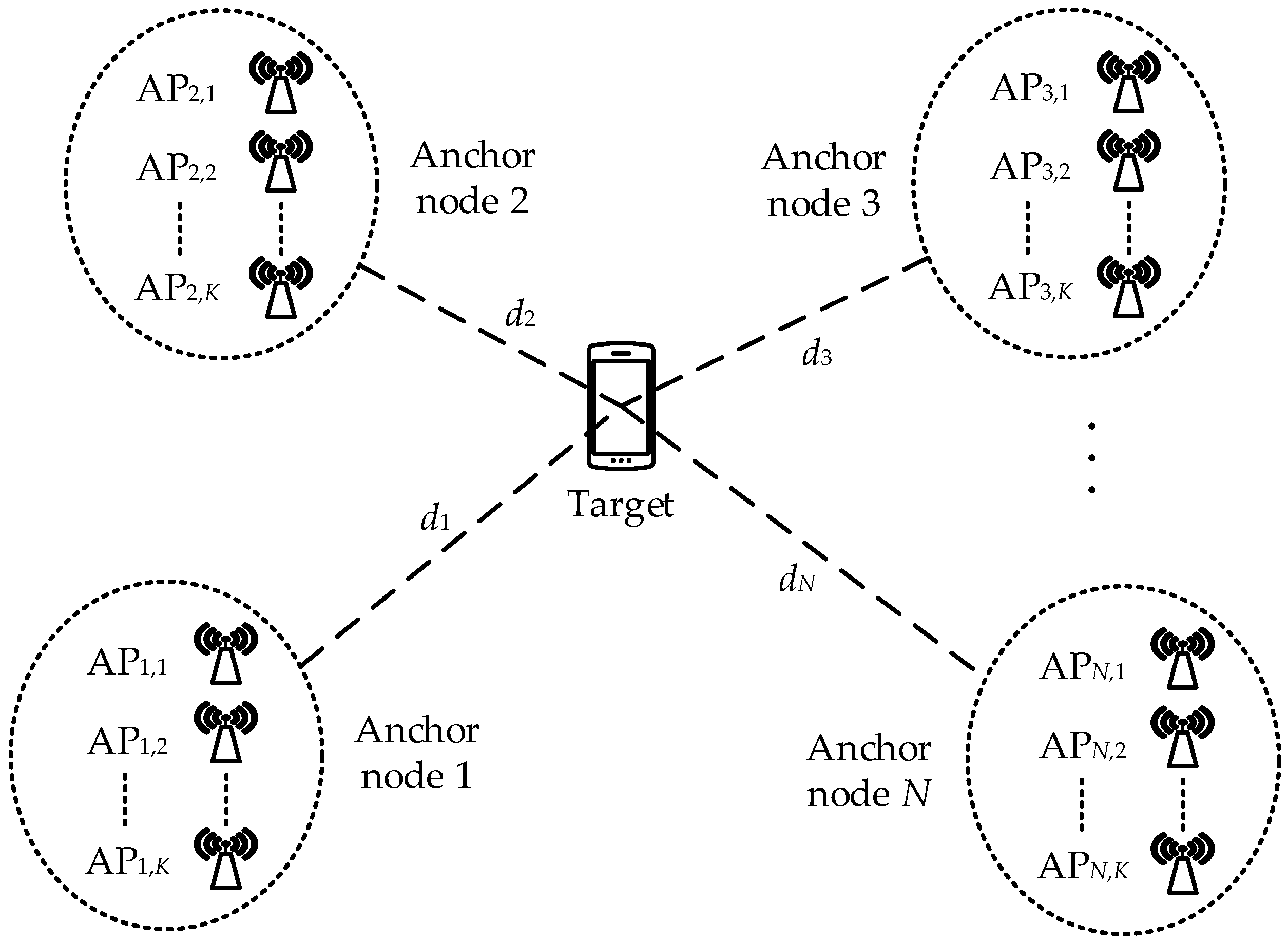
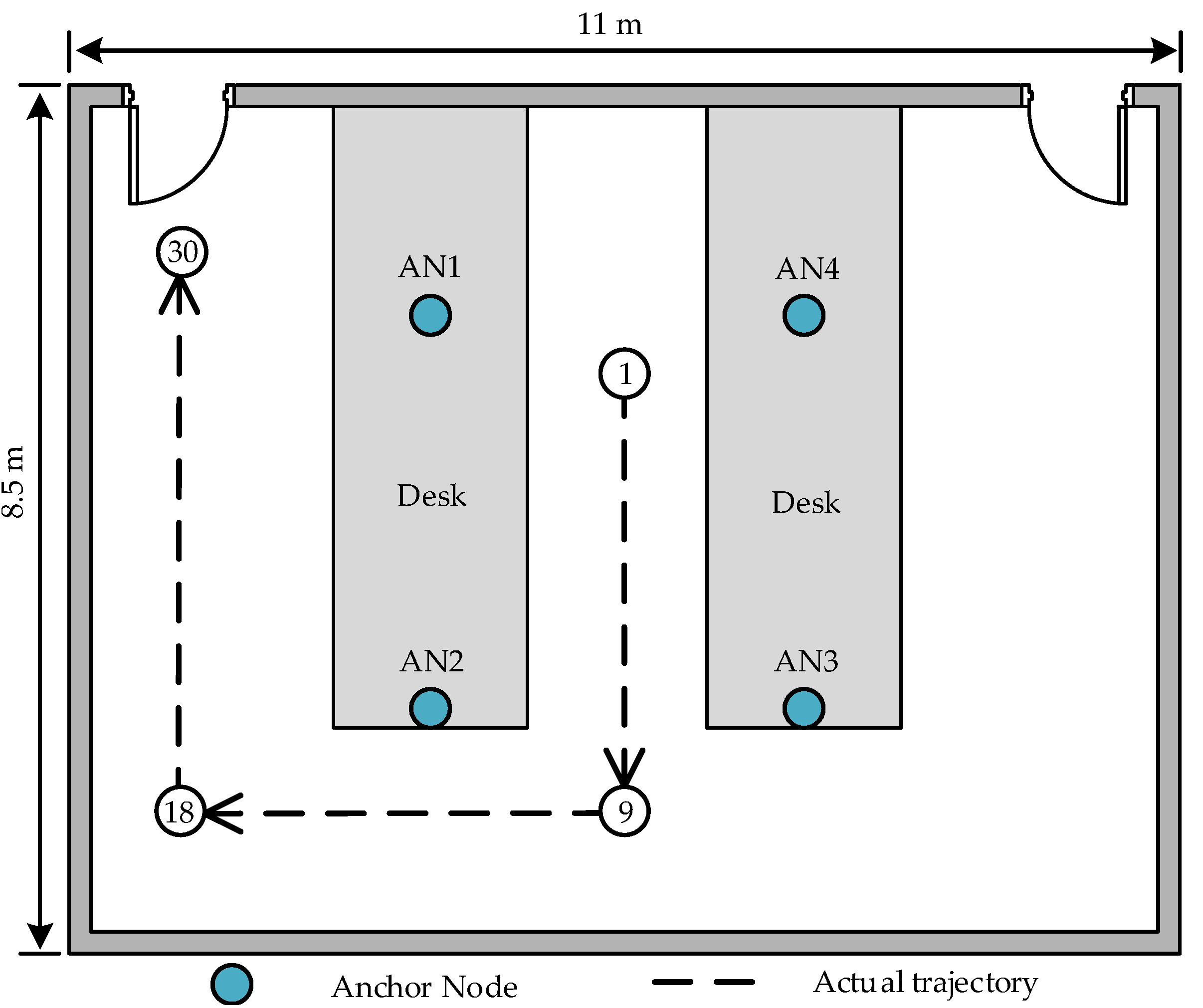
We consider a target in a WSN comprising
N ANs, where each AN is composed of a cluster of
K APs located in close proximity to each other, as depicted in
Figure 1. The location of the
nth AN within the WSN is known and represented by position vector
. On the other hand, position vector
indicates the unknown position of the target. Consequently, we can express the distance between the target and the
nth AN as
where
is the Frobenius norm. It is evident that the localization system depicted in
Figure 1 conforms to a conventional WSN localization system when
.
Performance discrepancies among APs in a WSN can be rectified through device calibration during the initial setup, thereby ensuring uniform performance across all APs within the network. The received RSSI of a target detected by the
kth AP in the
nth AN is denoted as
. Based on the log-normal model for RSSI measurements [
24],
can be mathematically expressed as
where
represents the RSSI of the target, which is measured by the AP at a distance of 1 m in an ideal environment. The symbol
denotes the path loss exponent in the localization environment. Additionally,
signifies the shadow fading term for the
kth AP in the
nth AN. Significantly, these shadow fading terms at different APs are commonly modeled as independent and identically distributed Gaussian random variables with zero mean and variance
[
17,
18,
19,
20].
For the
nth AN, the
K APs within it are capable of obtaining
K RSSI measurements from the target, which collectively form the set of RSSI samples measured by this AN:
Using the samples in
, an appropriate method can be employed to obtain the optimal estimate
of the target RSSI for the
nth AN. By substituting
into Equation (
2), it is possible to estimate the distance between the
nth AN and the target
Based on the optimal estimates of the target RSSI for
N ANs, the likelihood function regarding the target location can be derived from the model presented in Equation (
2):
By utilizing Equations (
4) and (
5), it can be further simplified as
According to Equation (
1), it can be inferred that
is a function of
. Therefore, the maximization of the likelihood function presented in Equation (
6) is equivalent to the minimization the cost function with respect to
:
For the purpose of enhancing the subsequent cost function
minimization, we opt for
over
due to its superior convenience. Evidently, the target location estimation can be achieved by efficiently minimizing
:
As observed from the aforementioned analysis, there are three issues that need to be addressed in order to acquire the location estimate of the target: first, constructing an AP cluster in which multiple APs function collectively as a unified AN; second, determining the optimal RSSI estimate of the target based on ; finally, minimizing the cost function to obtain the maximum likelihood estimate of the target location.
3. Establishing an AN with Multiple APs
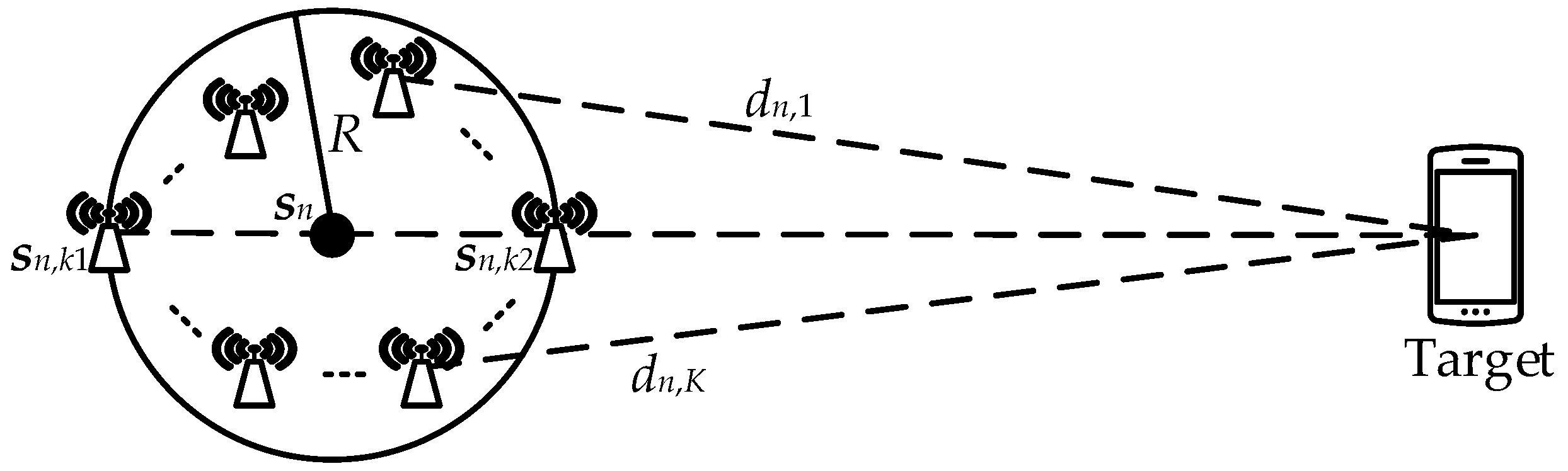
The
K APs comprising an AN are assumed to be positioned in a circular arrangement with a radius of
R, centered at the location of AN, as shown in
Figure 2. In the graph, the position vector of the
kth AP is
, and
represents the distance between the target and the
kth AP. It can be seen from the geometric relationship in the graph that for any two
and
, there exists
The equality in Equation (
9) holds when the
k1th and
k2th APs are positioned on the straight line connecting AN and the target, with separate circles on both sides of AN. The current layout of the two APs is evidently the worst. Assuming
, the RSSI from both APs satisfies
. Disregarding noise, Equation (
2) can be utilized to derive this relationship:
The measurement accuracy of RSSI by AP in practical is typically 1 dBm. Therefore, the two APs are considered to belong to the same AN when the difference between the theoretical measurements of
and
is less than 1 dBm. Hence,
It can be obtained from Equation (
11) that
The value of the maximum radius
of the smallest circle surrounding the AP cluster is evidently influenced by both distance
between the target and AN and environmental parameter
. The constraint on the radius of the AP cluster is relatively relaxed for targets located at a distance. The layout of WSN in indoor positioning applications typically exceeds 10 m, and the distance between the target and the sensor is seldom less than 1 m. Hence,
in Equation (
12) may have a value of 1 m. The value range of environmental parameter
was analyzed and provided in [
25]. Under the condition of natural logarithm,
. Consequently, Equation (
12) yields
cm.
The antennas of the multiple APs that constitute the AP cluster should be strategically positioned in a circular arrangement with a radius not exceeding . The center of the circle corresponds to the AN position.
4. Estimating the Optimal RSSI of a Target
According to the log-normal model presented in Equation (
2), there exists an approximate logarithmic relationship between the RSSI measurement error and the ranging error, resulting in a wider range of variation in the ranging errors compared to RSSI measurement errors. To enhance target localization accuracy, the primary task is to improve the precision of RSSI used for ranging by preprocessing AN-measured RSSI samples to obtain the optimal RSSI estimate of target [
26].
Since the shadow fading term, which is responsible for RSSI fluctuations, follows a zero-mean Gaussian distribution, the optimal estimate
of the target RSSI for the
nth AN can be obtained by the following equation:
Then, the solution of Equation (
13) is the sample mean
of
:
Obviously, the accuracy of
is closely related to
K. When
K reaches a certain threshold, highly accurate results for
can be yielded from Equation (
14). However, due to cost considerations, typically only two or three APs are deployed by a single AN at a time. In such cases, the use of sample mean
as
can lead to significant error, and it thus necessitates the development of a new method for determining
.
Replacing
in Equation (
4) with the sample
in
yields the corresponding distance estimate
. It is evident that a more reliable estimate can be obtained by utilizing a larger
resulting in a smaller
. Therefore, employing the distance estimates to define weights
where
represents the estimated distance obtained by substituting
in Equation (
4) with the sample mean
. By incorporating the weights illustrated in Equations (
15), Equations (
14) can be adjusted as
where
is utilized for weight normalization, representing the cumulative sum of weights assigned to all APs within the
nth AN, denoted as
.
5. Revising the MLE for Determining the Location of the Target
Performing a first-order Taylor expansion of
in the cost function
at
yields
Substituting Equation (
17) and Equation (
1) into Equation (
7), we obtain the following expression:
It can be observed that cost function
is a weighted aggregation of the error functions of the ANs where
serves as the weight factor. The process of weight normalization is executed:
where
is utilized for weight normalization. Subsequently, the cost function
can be updated as
Minimizing
is equivalent to determining
that yields a first-order derivative of
equal to zero, thereby solving the following equation:
Assuming
,
represents the weighted location vector of
N AN’s coordinates. Relocating the coordinate origin to
yields
Therefore, we have
. By substituting Equation (
22) into Equation (
21), we obtain
Consequently, we have
where
and
where
is the second-order identity matrix.
From Equation (
25), it is evident that
holds, thus enabling the possibility of performing an eigenvalue decomposition on
:
where
is a diagonal matrix composed of the eigenvalues obtained from
,
is a unitary matrix consisting of the eigenvectors derived from
. Considering
and
, we can deduce
and
accordingly. By substituting
,
, and Equation (
27) into Equation (
24), followed by pre-multiplying with
, we obtain
By further performing the Hadamard product of Equation (
28) with
, we obtain
where ⊙ denotes the Hadamard product operation, and
denotes the transformation of a column vector into a diagonal matrix. Therefore, we obtain
where
1 denotes a two-dimensional column vector consisting of all elements equal to one.
By integrating Equations (
28)–(
30), a matrix is formulated:
where
, and
is a 5 × 5 matrix that can be represented as
where
is a matrix of size
, consisting entirely of zero elements,
is the eigenvector of
, and
corresponds to the eigenvalue associated with
. As per Equation (
30), we can infer that
equals the sum of the first two elements in
.
The eigenvalue decomposition of
yields
where
is a diagonal matrix composed of
, which represent the eigenvalues of
,
is the matrix consisting of
, which are the corresponding eigenvectors of
and are normalized. However, since the sum of the first two elements in each row of
does not equal to
, it cannot be directly used to extract
. Therefore, scaling
with
and adjusting for the sum of its first two elements is necessary before extracting the third and fourth elements as an estimate for
:
where
. Based on this, it is possible to derive an estimate of the potential target location:
With varying
, distinct
can be obtained and subsequently substituted into Equation (
20) to compute the values of the cost function
. The
that minimizes
is then selected as the estimate for the target location.
6. APCL Method
As mentioned above, the APCL method proposed in this paper comprises two relatively independent components: one aims to achieve the optimal RSSI estimation of the target by utilizing the RSSI measurements obtained from each AP in the AN, and the other focuses on solving the maximum likelihood estimate of the target location within the WSN.
The algorithm for estimating the optimal RSSI from an AN to a target is known as the relative distance weighting (RDW) algorithm, which is summarized in Algorithm
Section 6. For the
nth AN, the RDW algorithm first uses all the RSSI samples
measured by this AN and the sample mean
to calculate the corresponding distance estimates
and
based on the log-normal model. Then, weights
are assigned to each sample according to their respective distances. Finally, the optimal estimate of target RSSI is obtained by normalizing the weighted sum of all RSSI samples, as demonstrated in Equation (
16). By traversing all ANs, we can obtain
.
| Algorithm 1 Relative distance weighting for estimating the optimal RSSI of the target. |
| Input: and , parameters of the log-normal model, and , a set of RSSI samples measured by each AN |
| Output: , a set of optimal estimates of the target RSSI for each AN |
| 1: for do |
| 2: Calculate the sample mean and its corresponding distance estimate for the n-th AN; |
| 3: Refine the distance estimates for samples in the nth AN; |
| 4: The weights corresponding to all APs within the nth AN can be obtained by substituting and into Equation (15); |
| 5: Calculate the sum of to obtain ; |
| 6: Substitute , and into Equation (16) to obtain the optimal estimate of the target RSSI for the nth AN. |
| 7: end for |
| 8: return |
After obtaining the optimal RSSI estimate of the target for each AN, an eigenvector-based target localization (ETL) algorithm is proposed in this paper to obtain the maximum likelihood estimate of the target location. The algorithm is summarized in Algorithm
Section 6. The first two steps of the ETL algorithm constitute the initialization phase. According to
, the distance estimates
between each AN and the target can be calculated in order to obtain the normalized weights
for each AN. Steps 3 to 8 represent the second phase of the ETL algorithm, with its main objective being the construction of data matrix
. To simplify the process of minimizing cost function
as depicted in Equation (
20), a weighted location vector is employed. By translating the coordinate system, we transform the problem of minimizing
into that shown in Equation (
24). Subsequently, we perform variable substitution on Equation (
24) using
to obtain Equation (
28). Based on Equations (
28), Equation (
31) is constructed using the Hadamard product. The data matrix
is constructed with the eigenvalues matrix
and the vector
as in Equation (
32). The final phase of the ETL algorithm involves obtaining the corresponding eigenvalue matrix
and the eigenvector matrix
through the eigenvalue decomposition of
. Each pair of eigenvalue
and eigenvector
can be used to derive a potential target location estimate
. The
that minimizes
is selected as the estimated target location
.
| Algorithm 2 Eigenvector-based target localization algorithm. |
| Input: and , parameters of the log-normal model, , a set of location vectors for each AN, and , a set of optimal target RSSI estimates for each AN |
| Output: , the maximum likelihood estimate of the target location |
| Initialization |
| 1: Substitute into Equation (4) to calculate the estimated distance between each AN and the target; |
| 2: Sum to obtain w, and then calculate the normalized weights for all ANs from Equation (19); |
| Constructing the data matrix |
| 3: Calculate the weighted location vector of N ANs; |
| 4: Based on vector , the new location vector of each AN can be obtained from Equation (22) after translating the coordinate system; |
| 5: Construct the matrix and the vector according to Equations (25) and (26), respectively; |
| 6: Perform the eigenvalue decomposition of matrix to obtain the diagonal matrix consisting of its eigenvalues and the unitary matrix composed of its eigenvectors; |
| 7: Transform the vector to the vector by using ; |
| 8: Substitute and into Equation (32) to construct the data matrix ; |
| Estimation of target location using eigenvalues |
| 9: Perform the eigenvalue decomposition of to obtain the diagonal matrix consisting of the eigenvalues and the matrix composed of the corresponding eigenvectors ; |
| 10: Apply Equation (34) to scale using , and then use Equation (35) to calculate the estimated potential location of the target, denoted as ; |
| 11: By substituting into Equation (20) to calculating the cost function , the that minimizes is utilized as the estimate for the target location, denoted by . |
| 12: return |
Hence, the APCL method initially employs the RDW algorithm to estimate the optimal RSSIs of the target for all ANs based on the set of RSSI samples . Subsequently, it utilizes the ETL algorithm to derive the maximum likelihood estimate of the target location by integrating the location vector information of multiple ANs.
7. Analysis of Cramer–Rao Lower Bound
For a WSN comprising
N ANs, each containing
K APs, based on the log-normal model presented in Equation (
2), the likelihood function for estimating the target location
is
where
S is the amalgamation of the RSSI sample sets obtained from each AN, i.e.,
.
To facilitate the subsequent derivation of the CRLB, it is necessary to define
Obviously,
represents a standard Gaussian random variable, and the independence of
holds for different
n and
k. If
denotes the log-likelihood function, then
The element of the Fisher matrix
in the
i-h row and the
jth column is
where
denotes the mathematical operation of calculating the expected value,
,
and
. Then, we have
where
is a constant. The second derivative of
with respect to
x is
The second term on the right side of Equation (
42) represents a weighted sum of zero mean Gaussian random variables, thereby making it a zero mean Gaussian random variable as well. Hence,
Similarly, we can acquire
By combining Equations (
43)–(
45), we can establish the relationship
, which links the elements of
to
:
Generally, the deviation
is used to characterize the localization error in the WSNs, encompassing errors in both
x and
y directions. Therefore, the CRLB of the localization system can be determined:
As depicted in Equation (
47), the CRLB of the localization system exhibits an inverse proportionality to the arithmetic square root of the number of APs within each AN. In other words, as
K increases, the CRLB decreases accordingly. Therefore, leveraging AP clusters can effectively enhance the localization performance of the system.
8. Complexity Analysis
In addition to localization accuracy, the computational complexity should also be considered as the performance of localization methods. The increase in computational complexity not only results in higher energy consumption, but also leads to longer time consumption for localization, which subsequently affects the accuracy of tracking and localizing moving targets. In the following, we analyze the asymptotic complexity of the APCL method in its worst-case scenario. As the APCL method is composed of both RDW and ETL algorithms, their computational complexities can be calculated separately to obtain that of the entire APCL method.
The operations in the algorithm can be categorized into two groups: numerical and matrix operations. Numerical operations encompass addition, subtraction, multiplication, division, exponentiation, and comparison, while matrix operations involve matrix multiplication, inversion, eigenvalue decomposition, assignment and scalar multiplication. The computational complexity of the numerical operations is evidently . denotes a dimensional matrix. If and hold, then the multiplication of and exhibits a computational complexity of . In case holds, either inversion or eigenvalue decomposition for demonstrates a computational complexity of , while assignment or scalar multiplication of has a computational complexity of .
In the RDW algorithm, it can be found that each of the
N ANs involved in localization performs operations from Step 2 to Step 6, as depicted in Algorithm
Section 6. The operations executed at each step of the RDW algorithm and their corresponding complexities are presented in
Table 2, the sum of the complexities of Steps 2 to 6 is
. Considering that all
N ANs need to perform these operations, the computational complexity of the RDW algorithm is
.
The ETL algorithm, in contrast to the RDW algorithm, incorporates not only numerical operations but also matrix operations. The specific operations executed at each step of the ETL algorithm and their corresponding complexities are presented in
Table 3. In summary, the complexity of the ETL algorithm is
.
Therefore, the computational complexity of the RDW algorithm and the ETL algorithm combined is . To analyze the growth trend of the computational complexity of the APCL method on K and N, we consider only the highest-order term and ignore its constant coefficient, resulting in an asymptotic computational complexity of for the APCL method.
11. Conclusions
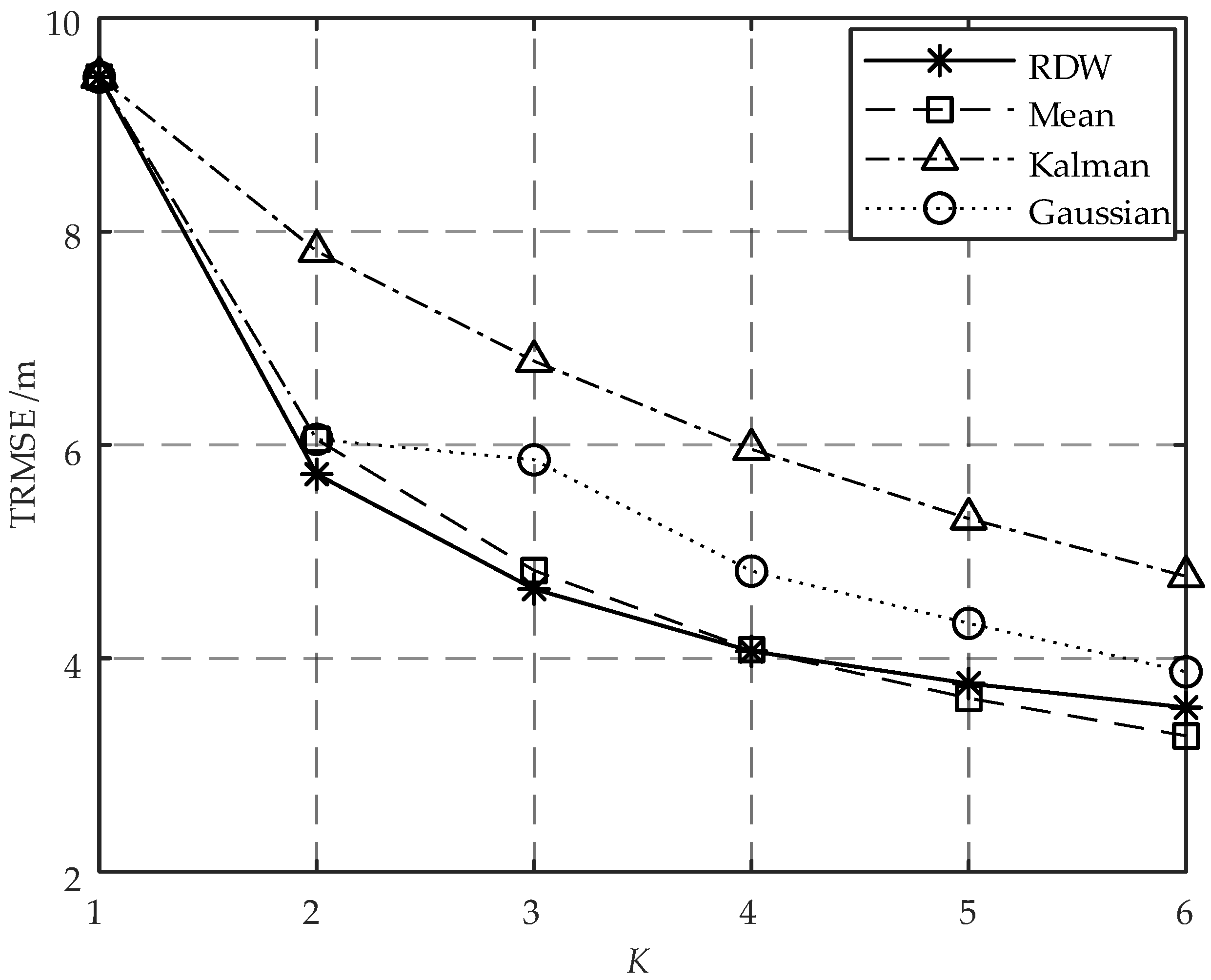
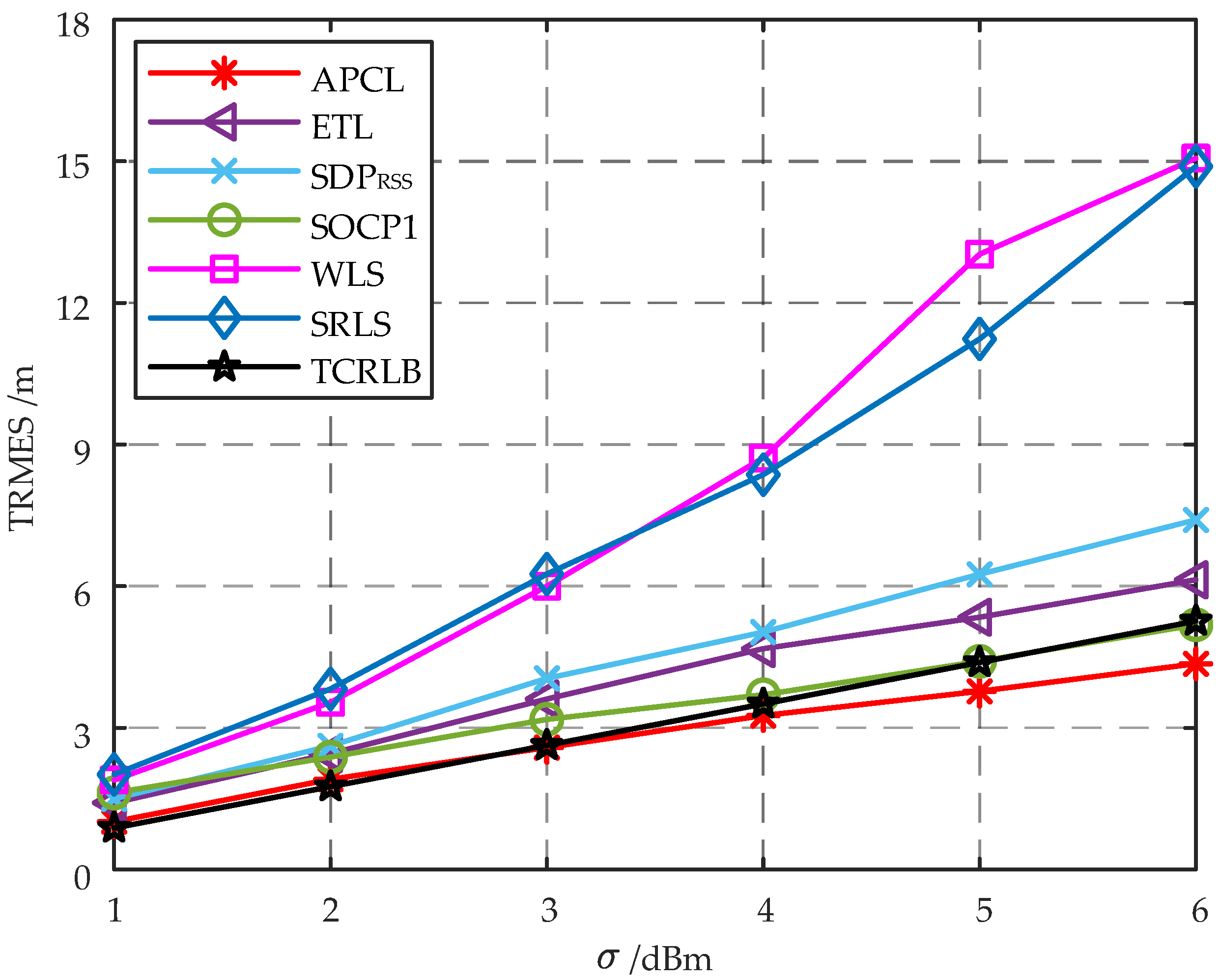
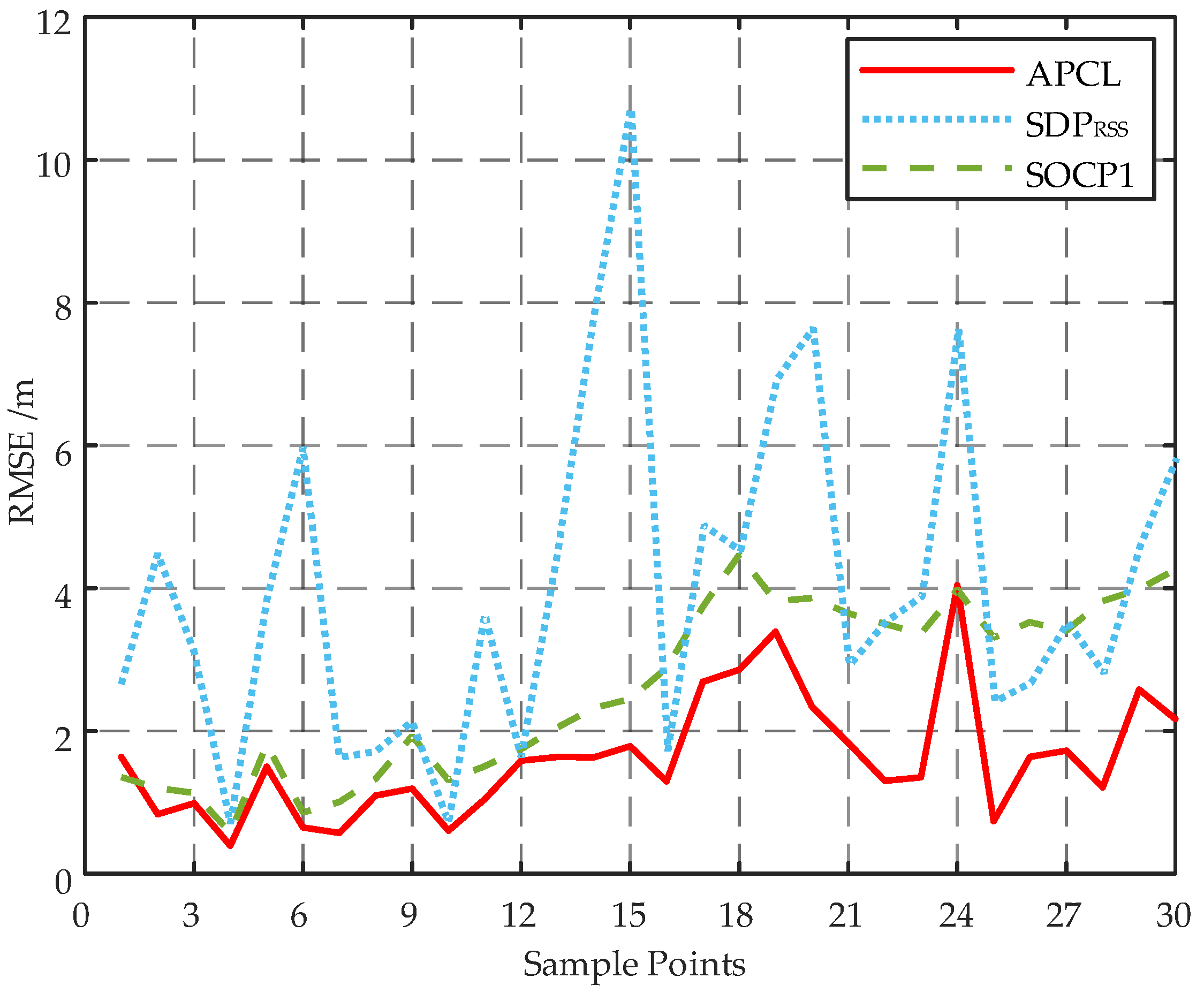
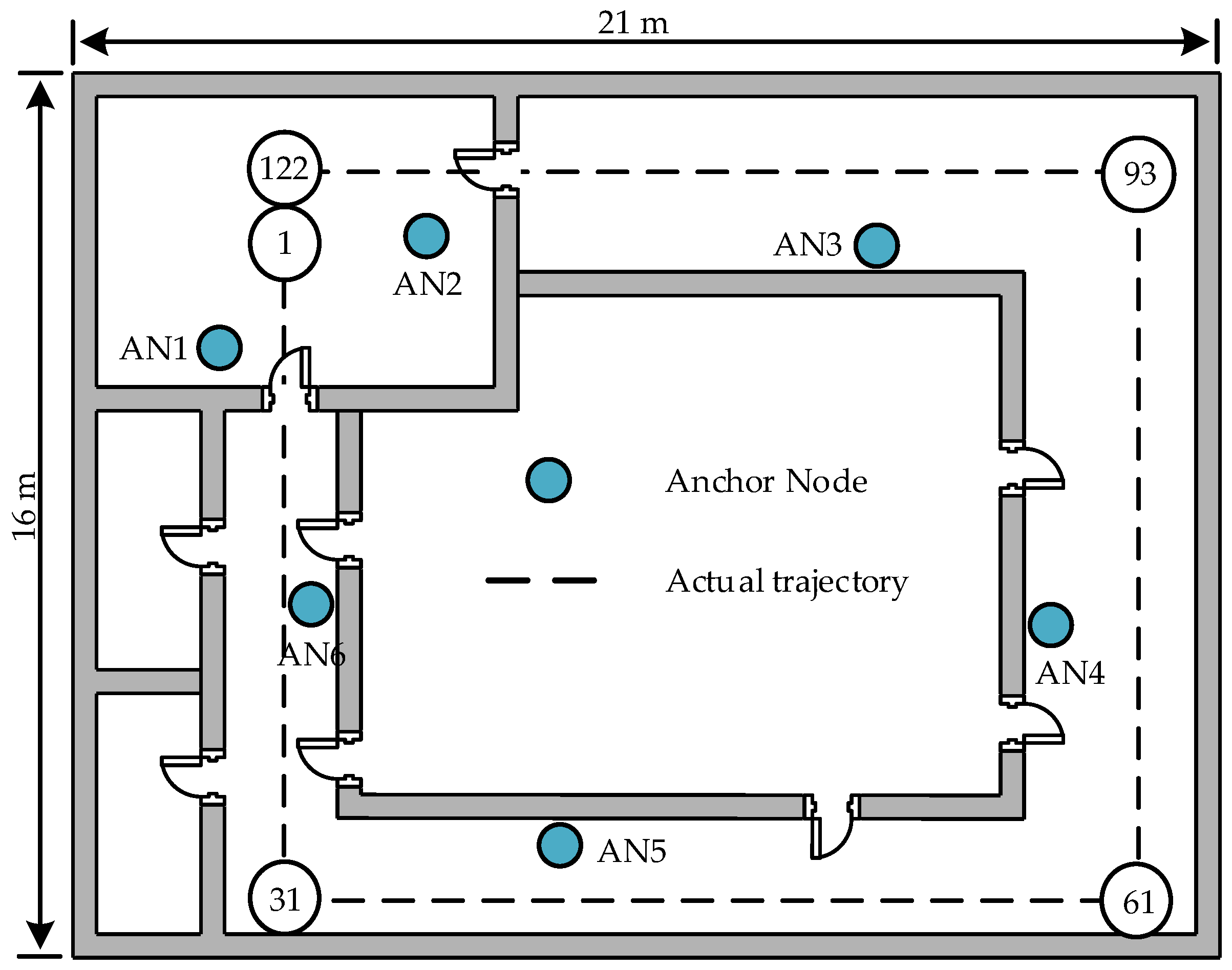
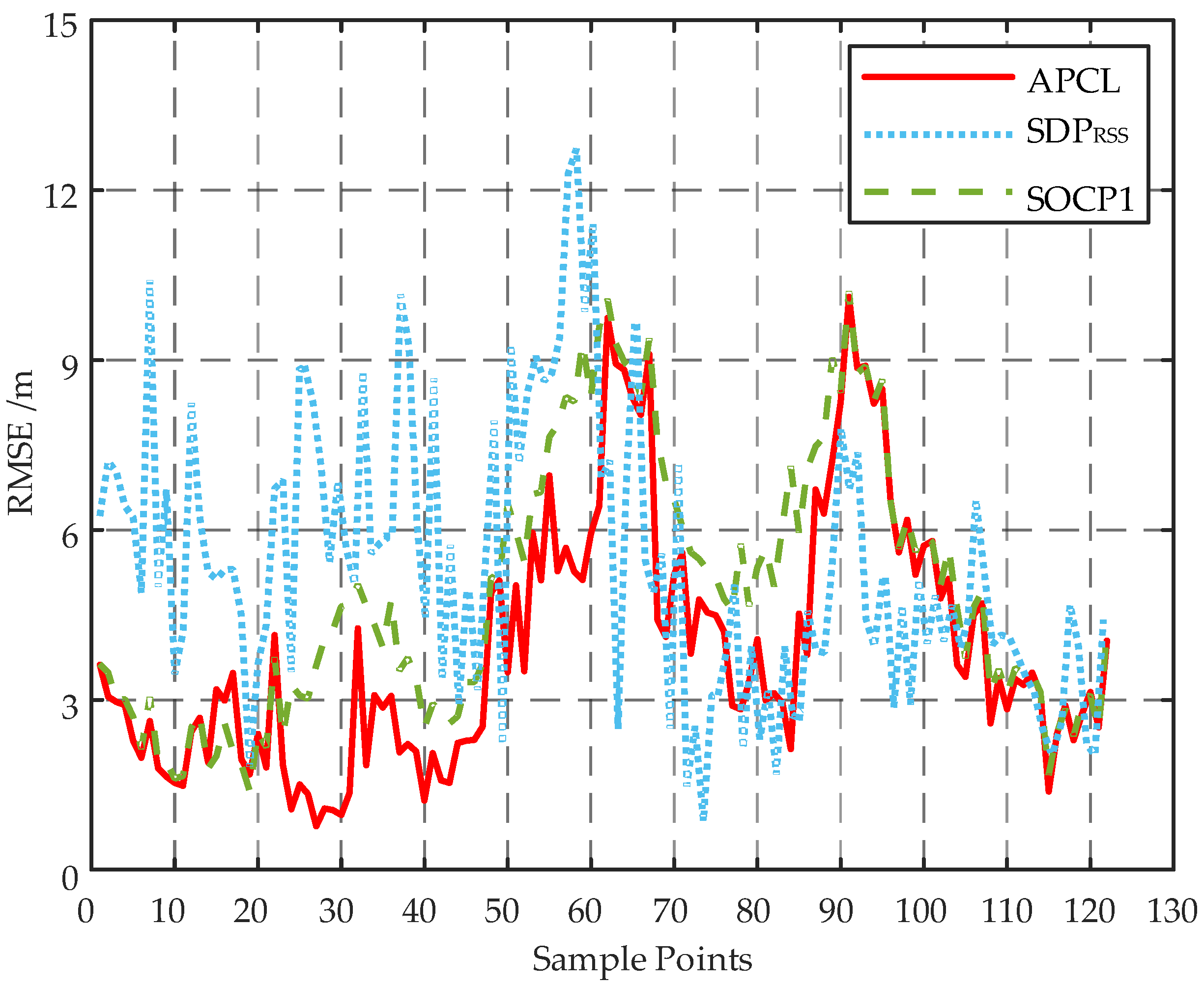
The APCL method proposed in this paper is a technique for achieving active target localization using a WSN constructed by the AP clusters. The APCL method comprises the RDW algorithm for estimating RSSI of the target, followed by the ETL algorithm for localization. The RDW algorithm utilizes target RSSI samples acquired from the AP cluster to estimate the optimal RSSI of the target. In scenarios with limited sample sizes, the RDW algorithm exhibits superior advantages and achieves significantly higher accuracy in estimating the target RSSI compared to mean filter, Kalman filter, and Gaussian filter. The ETL algorithm transforms the MLE problem into an eigenvalue problem by constructing the eigenvalue equation using the estimated RSSI of each AN. The approach enables fast and accurate estimation of the target position. The positioning accuracy of the ETL algorithm is comparable to that of convex relaxation method while surpassing WLS and SRLS algorithms. The APCL method, consisting of the RDW and ETL algorithms, exhibits superior positioning accuracy, minimal positioning time, and low computational complexity. In the actual indoor positioning scenarios, the APCL method demonstrates more stable performance. Consequently, when compared to classical localization algorithms, the APCL method demonstrates significantly superior performance in terms of both positioning accuracy and average positioning time. Its high precision and efficient localization make it particularly suitable for indoor mobile target tracking.
The proposed method effectively reduces the computational effort of localization and achieves high accuracy. However, it necessitates prior knowledge of the parameters in the log-normal model for the localization scene. Further research is warranted to explore how to extend this paper’s method to target localization when environmental parameters are unknown. In addition, the proposed method assumes that all APs within the AP cluster possess identical hardware parameters. However, further research is required to address device heterogeneity and enhance the applicability of this approach.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}