1. Introduction
The World Health Organization estimates that approximately 15% of the global population has some form of disability, with 2–4% experiencing severe functional difficulties [
1]. Danemayer et al. [
2] reported that the use of mobility devices (including prostheses, wheelchairs, intelligent power wheelchairs, etc.) ranged from 0.9 to 17.6% among patients with mobility challenges. As one of the most prevalent mobility aids, wheelchairs can significantly enhance the quality of life for people with disabilities and facilitate their participation in social activities.
However, individuals with hand or upper limb disadvantages may find it challenging to use conventional power wheelchairs. Cojocaru et al. [
3] found that over half of powered wheelchair users experienced difficulties learning to maneuver a conventional powered wheelchair. To improve mobility for people with disabilities and promote dignified participation in social activities, researchers have explored various wheelchair interaction methods. A comprehensive guide by Marco et al. [
4] explores the utilization of computer vision in healthcare to enhance the quality of life for individuals with disabilities. Moreover, a range of interaction techniques has been employed in power wheelchair human–computer interactions, such as voice control [
5,
6,
7], Sip-and-Puff interfaces [
8], Brain–Computer interfaces [
9,
10,
11], Tongue Drive Systems [
12], EMG-based interfaces [
13,
14], and eye-control interfaces [
15,
16,
17]. These methods reduce the physical, perceptual, and cognitive skills required to operate a power wheelchair for a broader range of people with disabilities. However, some interaction methods face limitations in their commercialization potential due to factors such as the high environmental impact, control overloading, difficulty of use, and high cost.
With the widespread recognition and acceptance of user-centered design in recent years, humanized power wheelchair interaction systems have become the trend. Eye control is an intuitive and natural input method that many researchers have utilized in designing power wheelchairs. Power wheelchairs based on visual input are divided into blink-controlled and gaze-controlled. In the case of blink-controlled power wheelchairs, blinks are often used as signals to start and stop the system or to indicate the desired direction based on the number of blinks. Li et al. [
18] designed an EOG-based switch with blinking as a condition for switching. If the user blinks in sync with the blinking of the switch button, the blink is judged to be intentional, and an on/off command is issued. Huang et al. [
19] proposed a wheelchair robotic arm system that utilizes EEG and EOG signals. In their approach, blinking and eyebrow raising were employed as preselection and validation steps, respectively. The button can only trigger the corresponding command after it has been preselected and verified. Choudhari et al. [
20] proposed a wheelchair system using one, two, and three voluntary blinks to control different commands: a single voluntary blink for forward and stop, two voluntary blinks for a left turn, and three voluntary blinks for a right turn. Blink-controlled power wheelchairs have a high degree of command accuracy, but frequent blinking may disrupt the user experience.
Eye-tracking wheelchair interaction systems using gaze control can be categorized into two types: gaze at the screen and gaze at the environment. Some researchers [
17,
21,
22] have proposed systems that drive wheelchairs by gazing at a screen. In such systems, users can control the wheelchair by gazing at buttons or modules on a display, such as forward, left, right, back, and stop. Sunny et al. [
23] developed a gaze control architecture for a wheelchair with a graphical user interface and a 6DoF robotic arm. The user can use the assisted robotic arm with the help of eye tracking and control the wheelchair to move by gazing at the wheelchair control interface on the graphical interface, which includes four buttons: forward, left, right, and backward. Although driving the wheelchair by looking at buttons on the display can increase the reliability of interpreting users’ intentions, there is a risk that users will need to shift their gaze from the environment to the display during use. Dahmani et al. [
15] employed convolutional neural networks by inputting images of users’ eyes and processing them to determine the gaze direction to direct the wheelchair. However, this method uses two small cameras fixed to the frames of glasses to capture images of users’ eyes, with cameras facing users’ pupils, potentially causing discomfort. Ishizuka et al. [
24] proposed a system based on gaze detection and environment recognition to enable movement in unknown environments by combining gaze information from eye tracking and obstacle information from LiDAR. However, the study’s experimental results primarily showed results related to turning, without elaborating on the overall movement effect.
Previous research indicates that eye-tracking technology is a natural and intuitive input method for individuals with disabilities to operate power wheelchairs, thereby improving their quality of life. However, gaps in research remain in terms of analyzing user requirements and the overall design process. To address these gaps, this study develops a gaze-controlled system for power wheelchairs using the extended FBS model and the MosCow method. The study analyzes the genuine needs of disabled users and describes the entire design process systematically. The system uses an eye-tracking device to detect users’ gaze positions and determine the wheelchair’s direction of motion. The system’s development and evaluation transpired in three phases, with aims and methods detailed in
Table 1. In the first stage, literature research and user interviews identify potential user needs, and then functional requirements are defined through an extended FBS model. In the second stage, requirement prioritization is analyzed using the MosCow method, and the wheelchair system is designed to meet functional requirements based on M-level and S-level requirements. The final phase encompasses system evaluation.
In the subsequent sections, we will introduce and discuss each of these three stages.
2. Defining the Functional Requirements of the System
In this section, we conducted literature research and user interviews to gain a preliminary understanding of user needs for wheelchair interaction systems. To better address user needs, we employed the extended FBS model to analyze and transform the preliminary requirements, resulting in more scientific and objective user requirements. Throughout this process, we took into account the user’s basic situation, daily challenges, and expectations for future wheelchairs.
2.1. Method
2.1.1. Literature Research
Yuan et al. [
25] employed the Analytic Hierarchy Process (AHP) and Kano Model to categorize wheelchairs into three levels based on their features and characteristics. The three levels identified were low-level wheelchairs, which offer basic dimensions and affordability; mid-level wheelchairs, which emphasize comfort and cost effectiveness; and high-level wheelchairs, which provide comfort, optimal functionality, and innovation. Meanwhile, Rice et al. [
26] examined falls among wheelchair users, many of whom require assistance to recover and may remain on the floor for 10 minutes or longer. Moreover, the researchers [
27] conducted semi-structured interviews with a cohort of 20 wheelchair users, revealing that 70% of the participants expressed fear of falling, while 80% of them acknowledged requiring assistance for recovery. Pellichero et al. [
28] also investigated wheelchair use safety. Frank et al. [
29] conducted a study on the pain and discomfort experienced by power wheelchair users who believed their pain was related to the wheelchair. Additionally, Viswanathan et al. [
30] conducted surveys and found that wheelchair users want the ability to choose different levels of smart wheelchair control based on their physical condition and scenarios while expressing concerns about safety. In a cross-sectional study based on personal interviews, Sarour et al. [
31] identified safety, comfort, and weight as the paramount concerns among wheelchair users.
Table 2 provides a comprehensive summary of these requirements. Users prioritize several key factors that greatly influence their wheelchair experience. Ensuring safety, optimizing comfort, maintaining cost effectiveness, and facilitating easy operation are the primary considerations that underscore their essential needs. By addressing these aspects, wheelchair designs can better meet the expectations and requirements of users, leading to enhanced satisfaction and overall usability.
2.1.2. User Interviews
We interviewed two long-term users of power wheelchairs via online and telephone platforms. One participant had paraplegia while the other had progressive muscular dystrophy. Both individuals had more than 4 years of experience using wheelchairs and had used three different models. During the interviews, we inquired about their personal background, wheelchair usage experience, and future expectations for wheelchairs. Participants reported that wheelchairs are necessary for daily activities and provide significant assistance in daily life. Their primary concerns included collisions, rollovers, and obstacles encountered due to poor control and complex driving situations. They expressed a desire for future wheelchairs to be safer, more easily controllable, and more cost-effective. With respect to the gaze-controlled wheelchair, they expected it to be safe, accurate, easy to control, comfortable, visually appealing, and affordable.
2.1.3. The Extended FBS Model
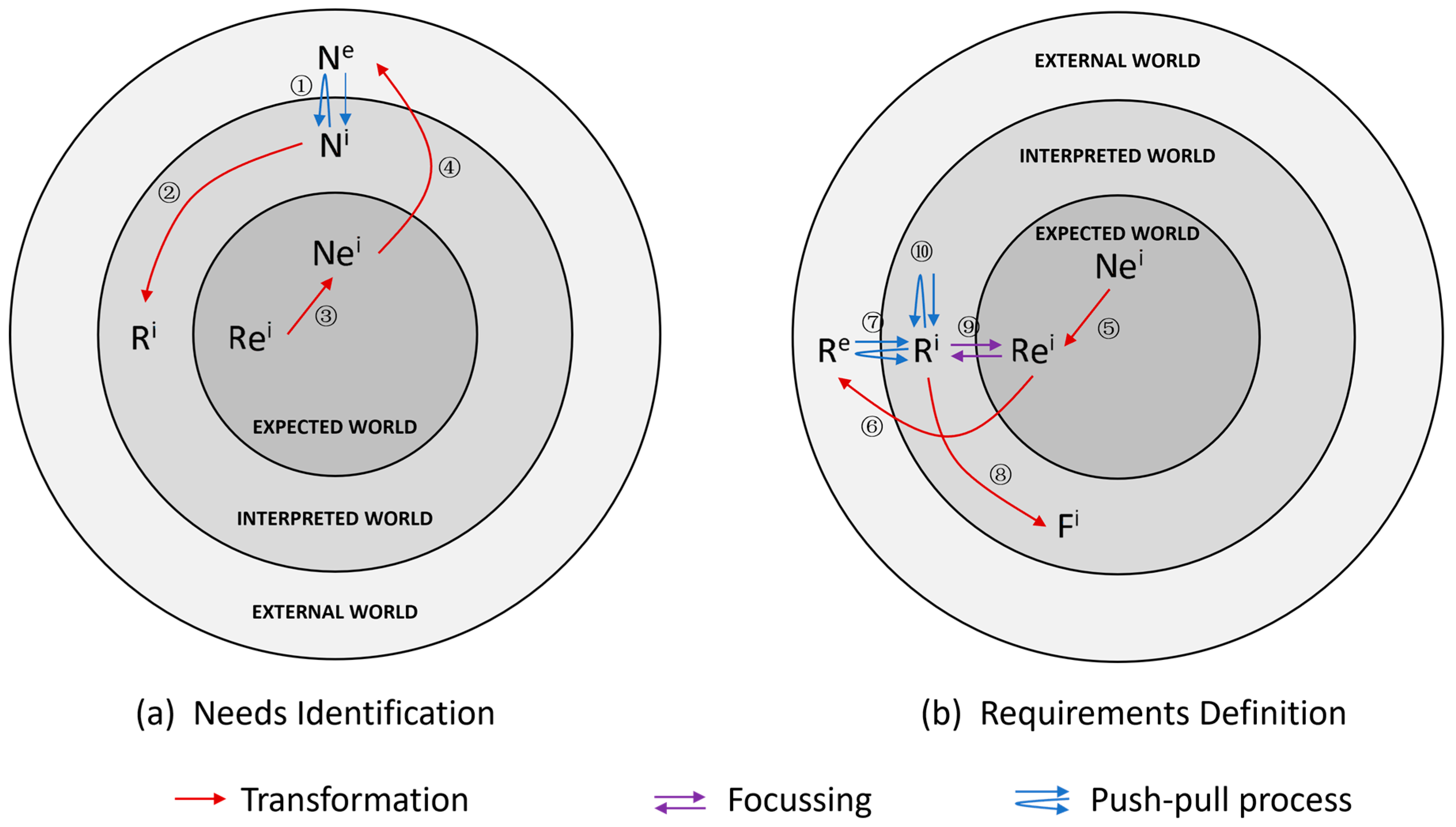
To circumvent the limitations of a traditional user requirement analysis through research and interviews, this study employed the Extended Function–Behavior–Structure (FBS) model for analyzing potential user requirements during the early stages of system design, providing a reference for subsequent design processes. Gero et al. [
32,
33] initially proposed the FBS framework, which describes design activities by connecting the external world, interpreted world, and expected world through three variables: Function (F), Behavior (B), and Structure (S) variables. The design activity’s outcome involves effecting change in the external world by focusing on the goals achieved in the expected world. Cascini et al. [
31] further developed and refined the model by integrating two new variables, Needs (N) and Requirements (R), within the FBS framework’s three worlds, ultimately proposing the Extended FBS model [
34], as illustrated in
Figure 1.
In this context, ‘Ne’ denotes ‘Needs in the External World’, while ‘Ni’ signifies ‘Needs in the Interpreted World’ and ‘Nei’ represents ‘Needs in the Expected World’. Similarly, ‘Re’ stands for ‘Requirements in the External World’, ‘Ri’ refers to ‘Requirements in the Interpreted World’, and ‘Rei’ corresponds to ‘Requirements in the Expected World’. Lastly, ‘Fi’ is indicative of ‘Functions in the Interpreted World’.
In the Extended FBS model, needs represent an expression of a perceived undesirable or ideal situation, which can be extracted by observing user behavior or perceived or assumed by the designer. Requirements refer to measurable attributes associated with one or more needs. The Extended FBS model describes the processes of need identification and requirement definition, consisting of the following steps:
① Investigating user needs Ne in the external world and generating interpretations of needs Ni.
② transforming Ni into a preliminary requirement Ri.
③ Translating the initially expected requirements Rei into Nei, ensuring that unprovided user needs are considered.
④ Transforming Nei into Ne and then verifying the expected requirements with the user and, if negative feedback is received, reinterpreting Ne through steps ① and ②.
⑤ Transforming Nei into Rei variables.
⑥ Expanding Rei to more or the equal number of Re.
⑦ Deriving and interpreting Re into Ri (with the help of design experience).
⑧ Transforming part of Ri into Fi.
⑨ Further focus on Ri as Rei to obtain the initial design requirements.
⑩ Refining Ri through design experience and further derivation of new design requirements.
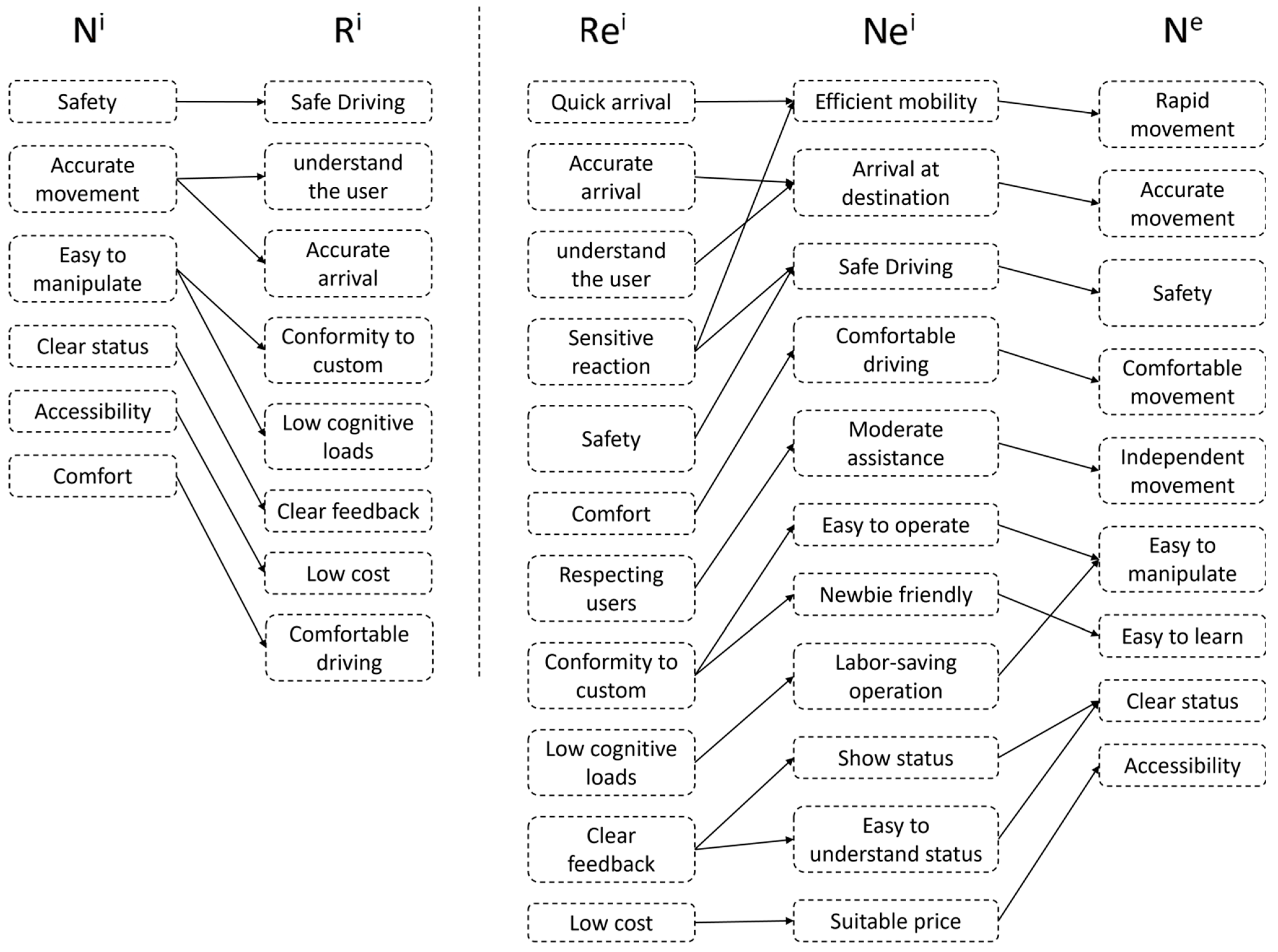
2.2. Results
To avoid the drawbacks of a traditional user needs analysis relying solely on research interviews, this study employed the Extended FBS model to identify the results of literature research and user interviews. First, the external user needs N
i obtained from the research are transformed into R
i, which allows for the aggregation of needs by category. Second, Re
i is transformed into Ne
i by fully considering the necessary requirements not mentioned by the user, and then further verifying with the user to confirm the expected requirements. The results of the need identification based on the Extended FBS model are illustrated in
Figure 2.
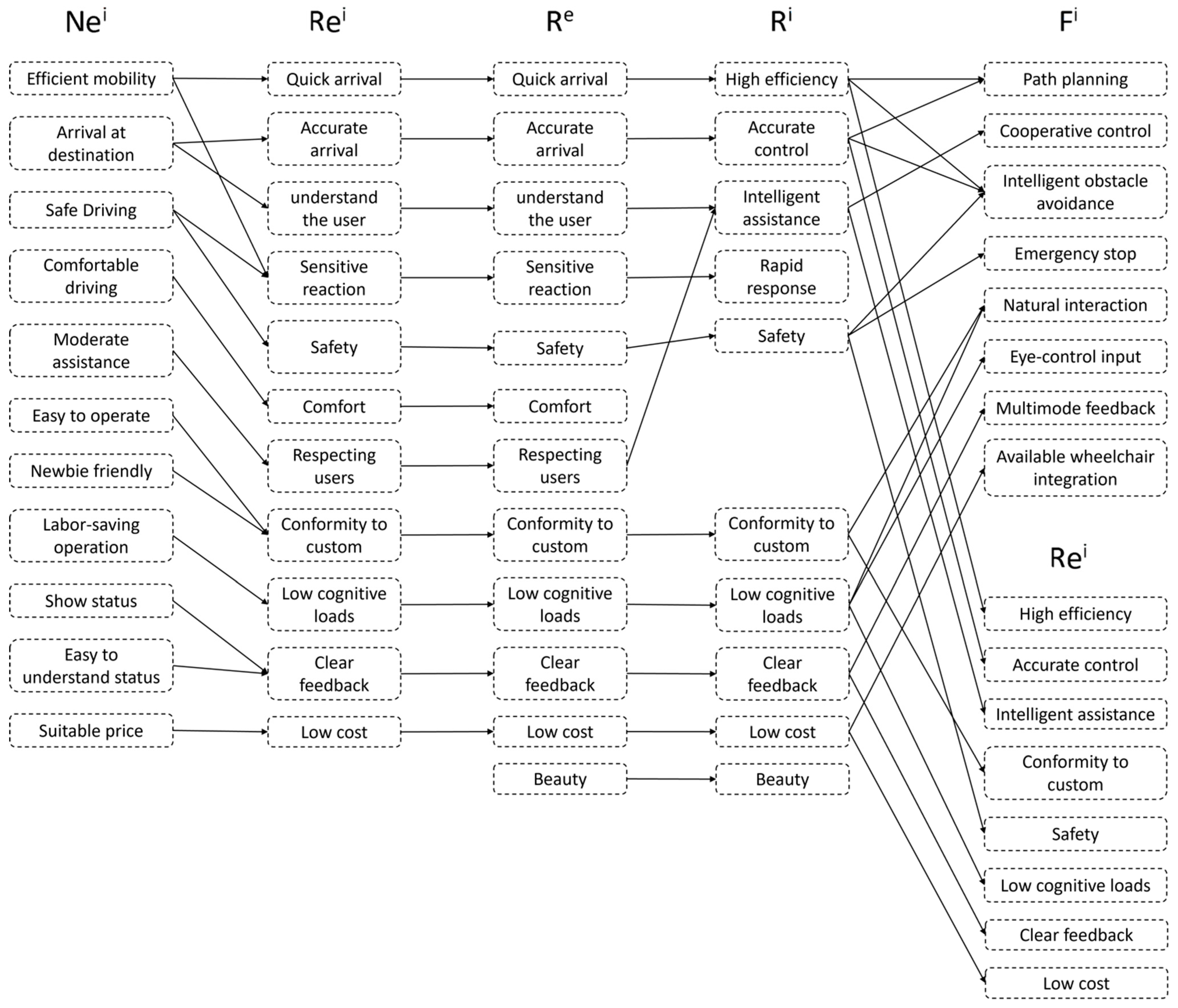
Upon obtaining Ne
i, the design requirements are defined, as illustrated in
Figure 3. First, Re
i is transformed and expanded into R
e; second, R
e is derived into R
i with the assistance of design experience; finally, a portion of R
i is converted into F
i, and R
i is further refined into Re
i to obtain the initial design requirements.
According to
Figure 3, users expected wheelchairs to include needs such as high efficiency, accurate control, intelligent assistance, safety, custom conformity, a low load, clear feedback, and a low cost. These expectations include functions such as path planning, collaborative control, intelligent obstacle avoidance, an emergency stop, natural interaction, eye-control input, multimodal feedback, and integration with existing wheelchairs.
2.3. Summary of This Section
This section aims to identify the needs and challenges of wheelchair users through literature research and user interviews. To ensure the objectivity and accuracy of the user requirements, we applied the extended FBS model to analyze and transform the preliminary requirements. Based on this, we established that the ideal wheelchair should possess the following needs: high efficiency, accurate control, intelligent assistance, safety, custom conformity, a low weight, clear feedback, and a low cost. Additionally, users expect the wheelchair to have several functions, including path planning, collaborative control, intelligent obstacle avoidance, an emergency stop, natural interaction, eye-controlled input, multimodal feedback, and integration with existing wheelchairs.
5. Conclusions
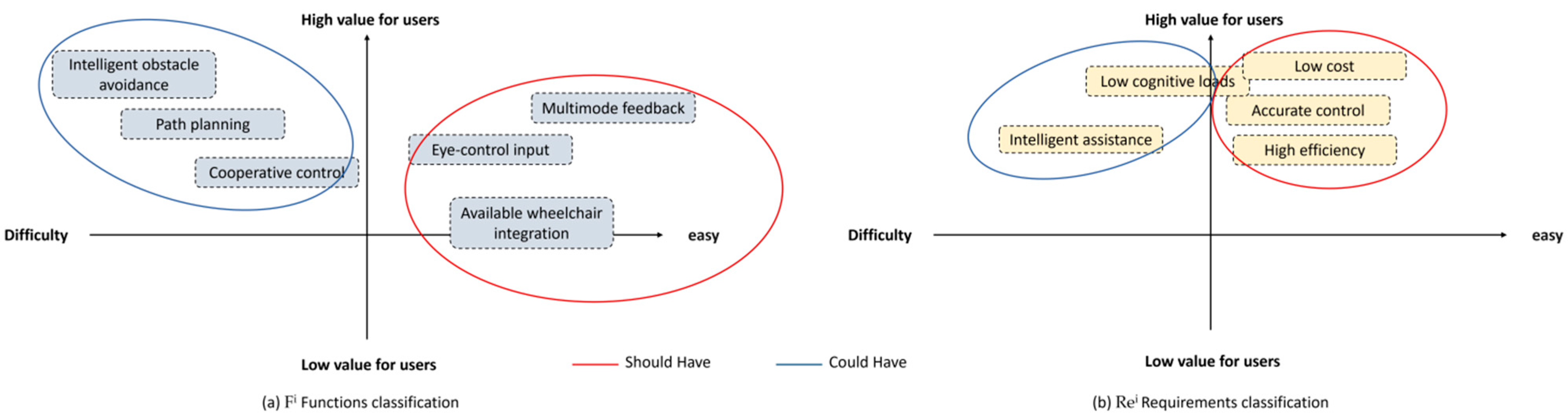
This study presents a gaze-controlled system for power wheelchairs, utilizing the extended FBS model and the MosCow method. We began by conducting a comprehensive analysis of user requirements derived from literature research and user interviews, according to the extended FBS model. Subsequently, the MosCow method was used to prioritize and categorize the identified user requirements into “Must Have” and “Should Have” categories. Based on these requirements, we developed an intuitive and efficient gaze-controlled system for power wheelchairs, designed to assist individuals facing manual control challenges who struggle to use a joystick.
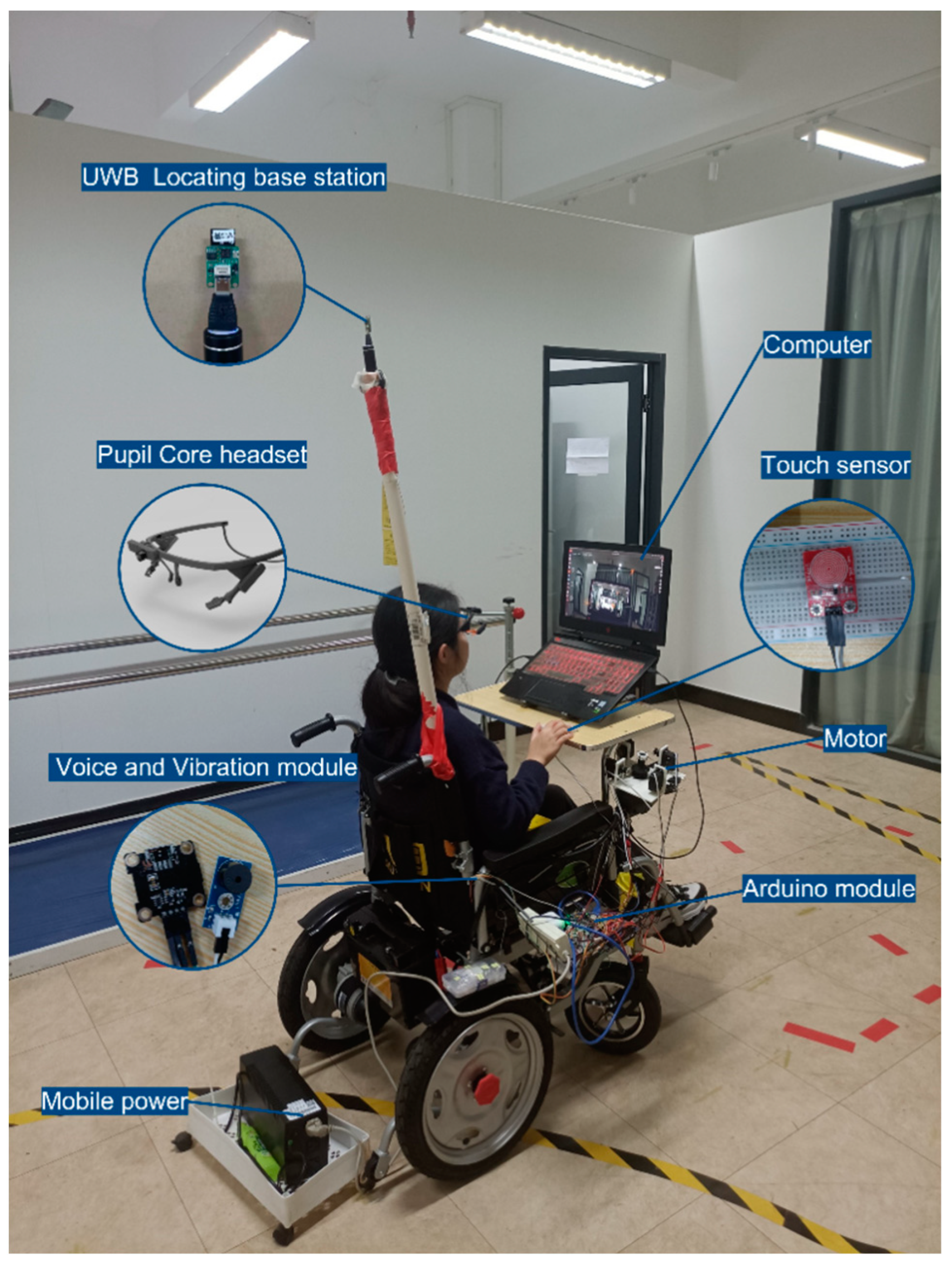
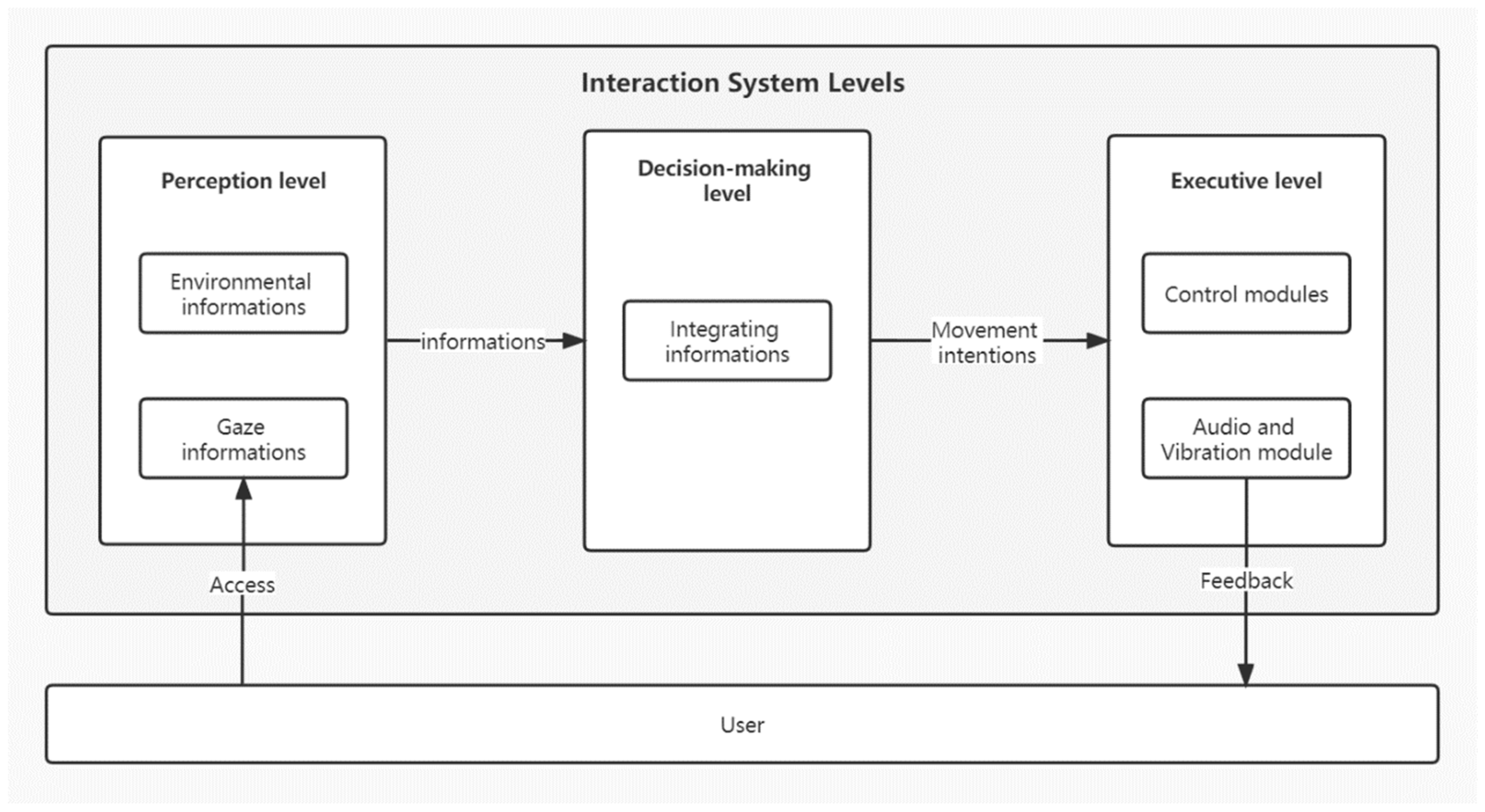
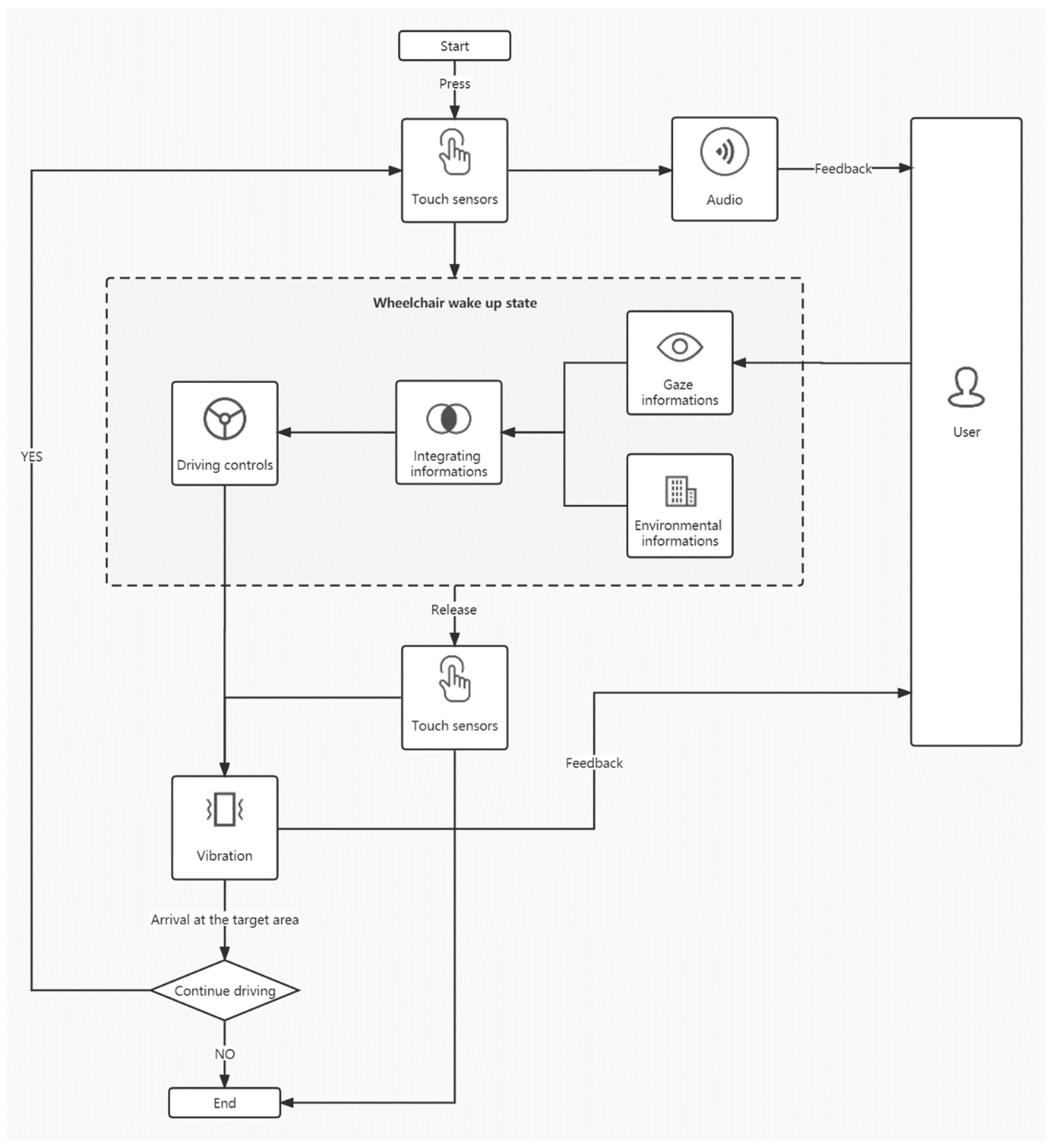
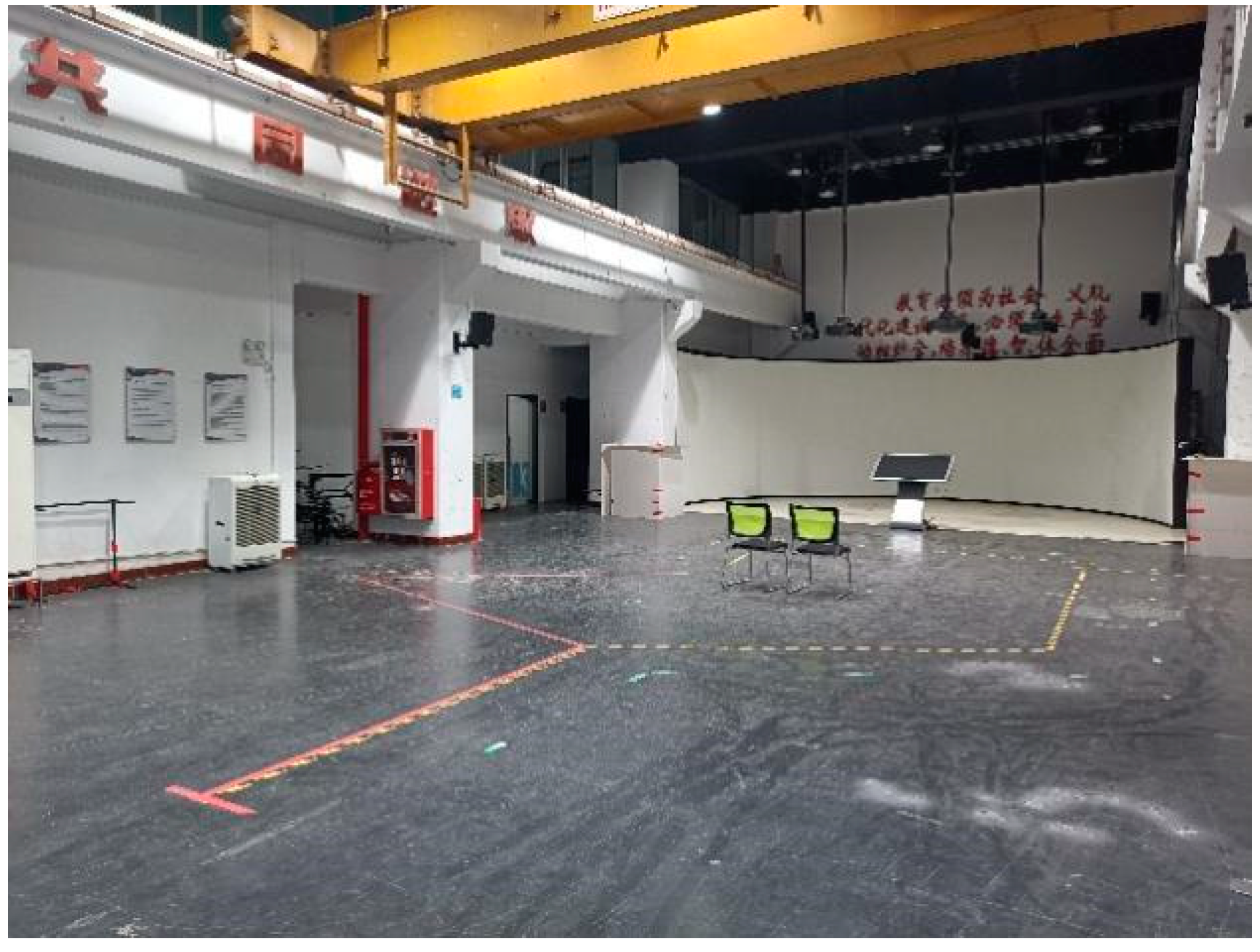
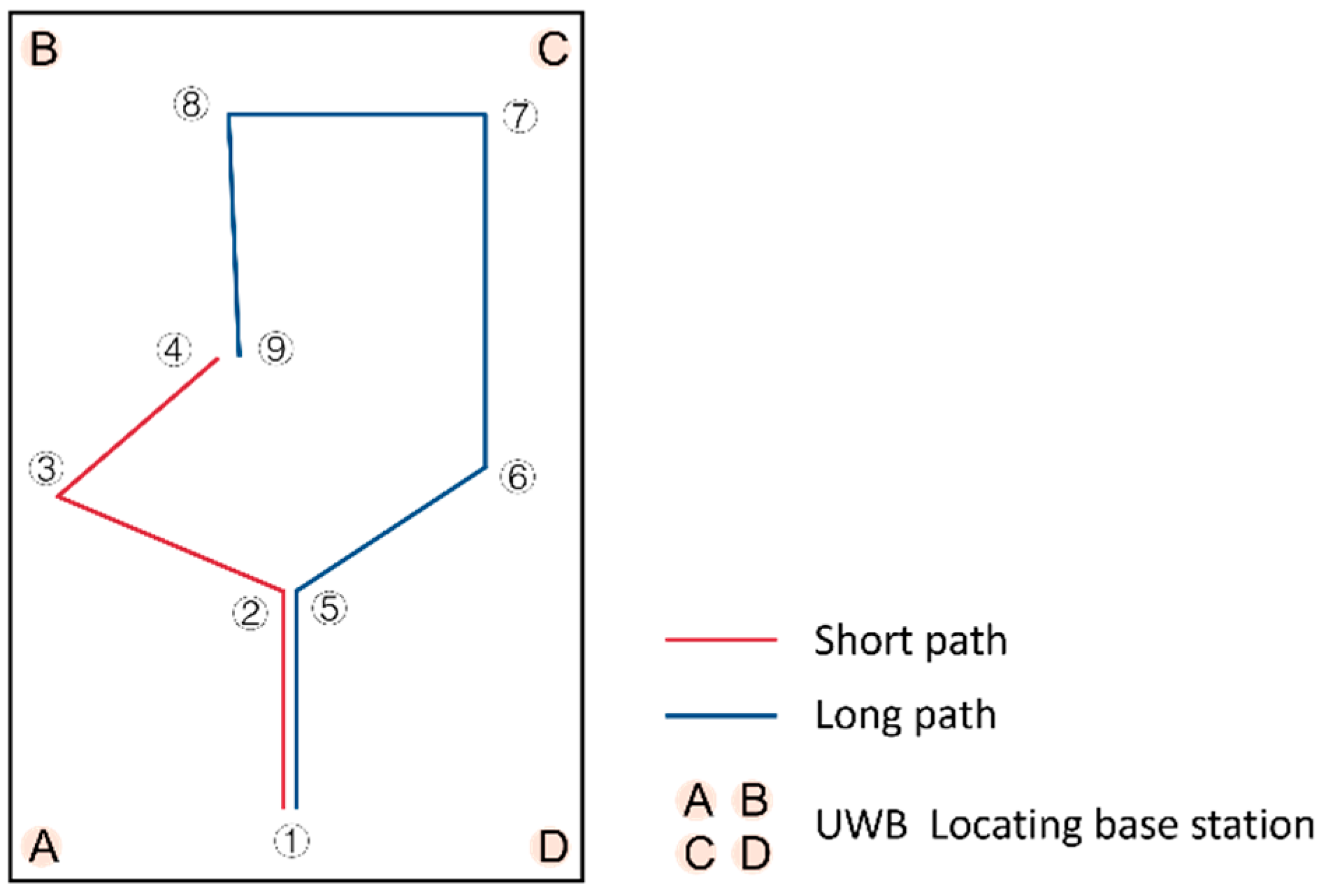
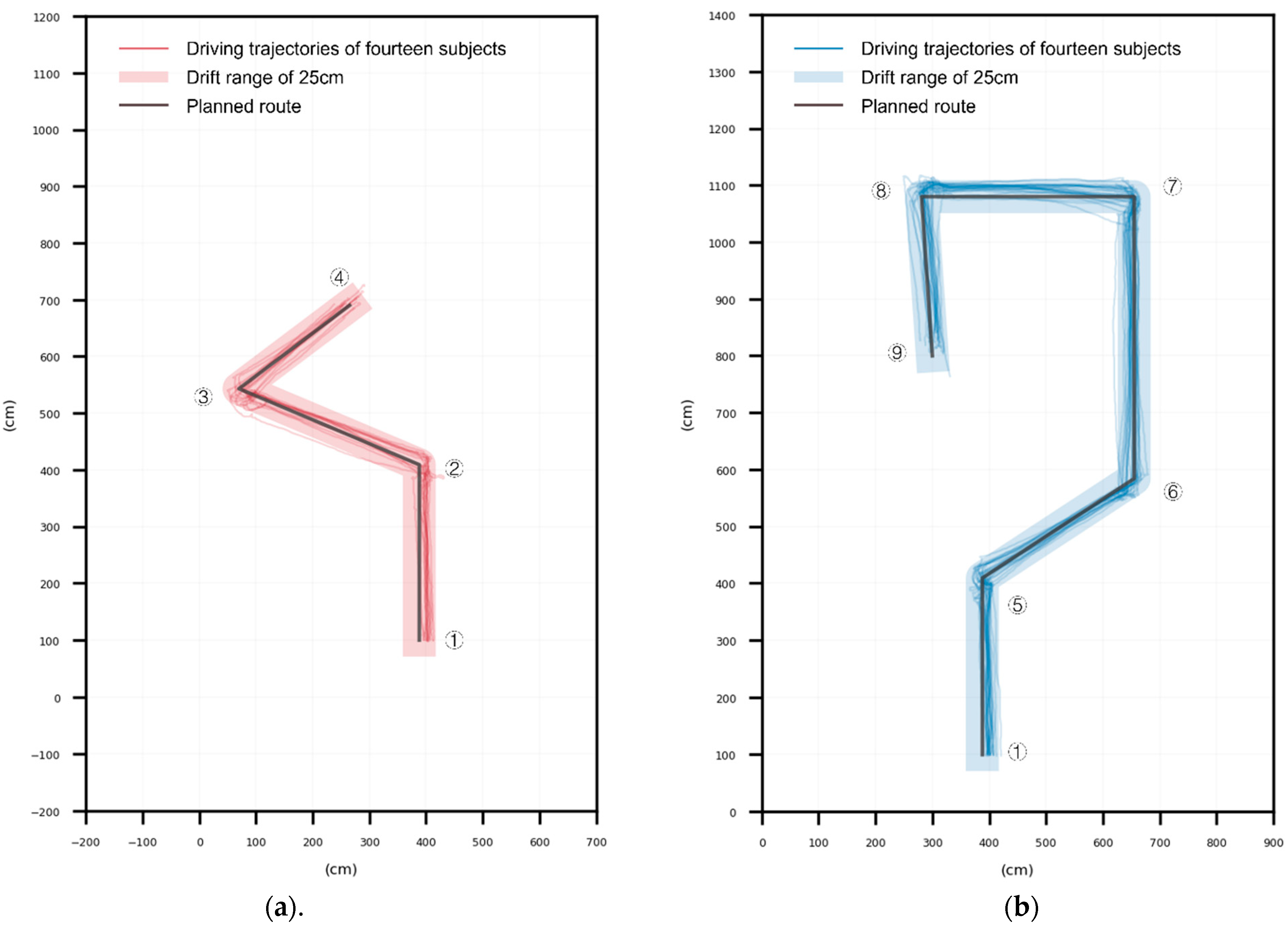
The proposed system aims to reduce complexity while addressing users’ essential needs. To achieve this, critical components such as eye trackers, control modules, audio and vibration modules, and touch sensors are integrated into existing power wheelchairs. The system utilizes a three-level approach of perception, decision making, and execution to allow for the continuous analysis of the user’s intention to move short distances, thus enabling long-distance driving. The system’s effectiveness was verified through gaze-controlled wheelchair driving experiments in a simulated indoor environment. All participants successfully followed the designated route, exhibiting an average drift of less than 20 cm. Moreover, the SUS results suggest that the system possesses good usability, while the satisfaction scale indicates that the subjects expressed high levels of satisfaction with the system.
However, our study has certain limitations. Firstly, due to the impact of COVID-19 and the product being in the initial development stage, we recruited healthy individuals with hands bounded as subjects. Secondly, the system was tested and evaluated exclusively indoors, limiting the assessment of its effectiveness and user experience in outdoor environments. Moreover, the study presents only a preliminary application of the extended FBS model without in-depth optimization and integration.
Despite these limitations, our research successfully demonstrates the process of transitioning from user research to a requirement analysis, design prototype implementation, and testing. By employing the extended FBS model and the MosCow method, we extracted and sorted users’ real requirements, culminating in a valuable concept prototype. We also conducted simulation tests to confirm the system’s effectiveness, usability, and user satisfaction. In future research, we plan to address these limitations and develop a wheelchair system that is more beneficial, easy to use, and accessible for individuals facing manual control challenges.


 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}