
Wearable Ball-Impact Piezoelectric Multi-Converters for Low-Frequency Energy Harvesting from Human Motion

 ,
,  ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
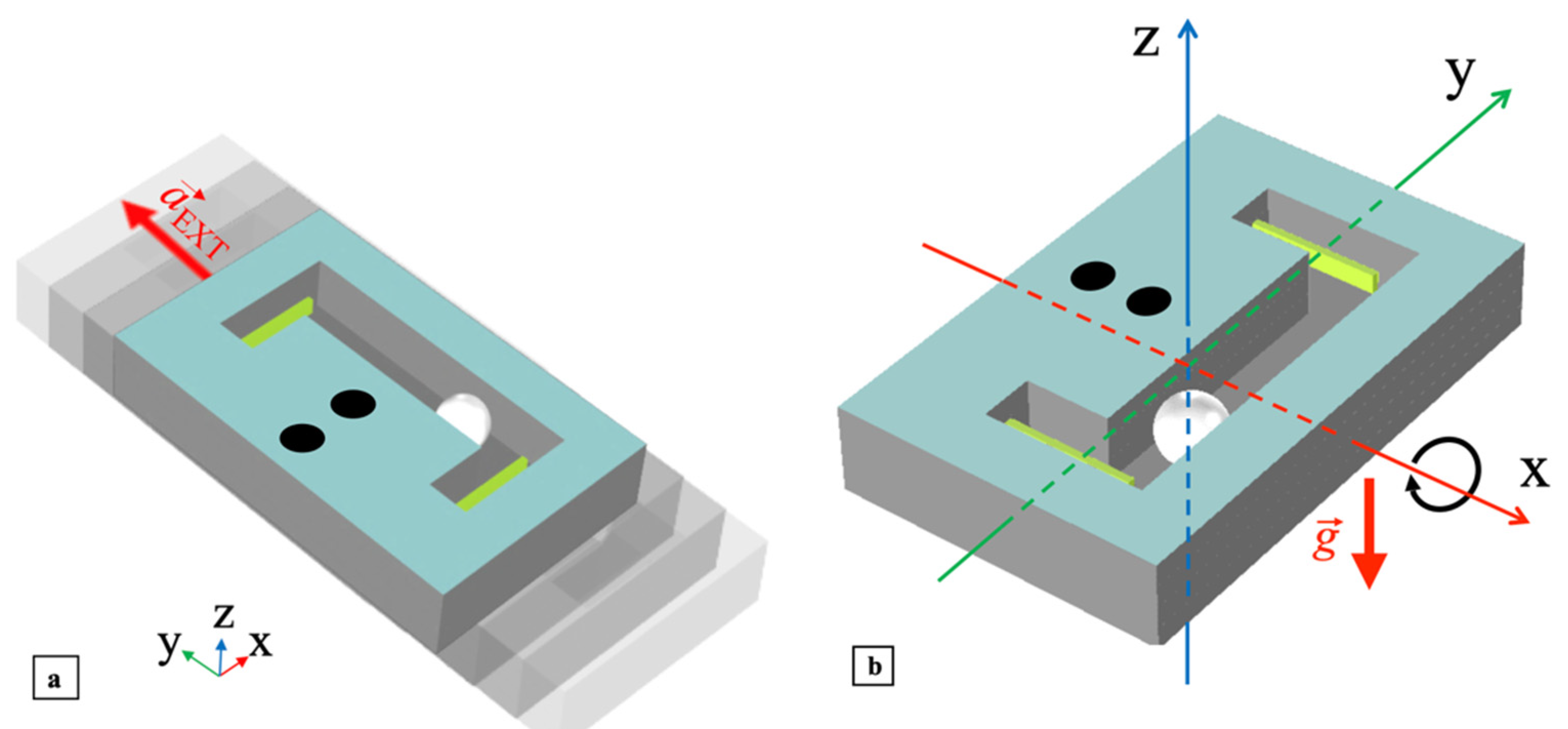
2. Mono-Axial and Bi-Axial Ball-Impact Multi-Converter Piezoelectric Harvester Description
3. Analytical Modelling of a Transverse Ball Impact on a Cantilever Tip
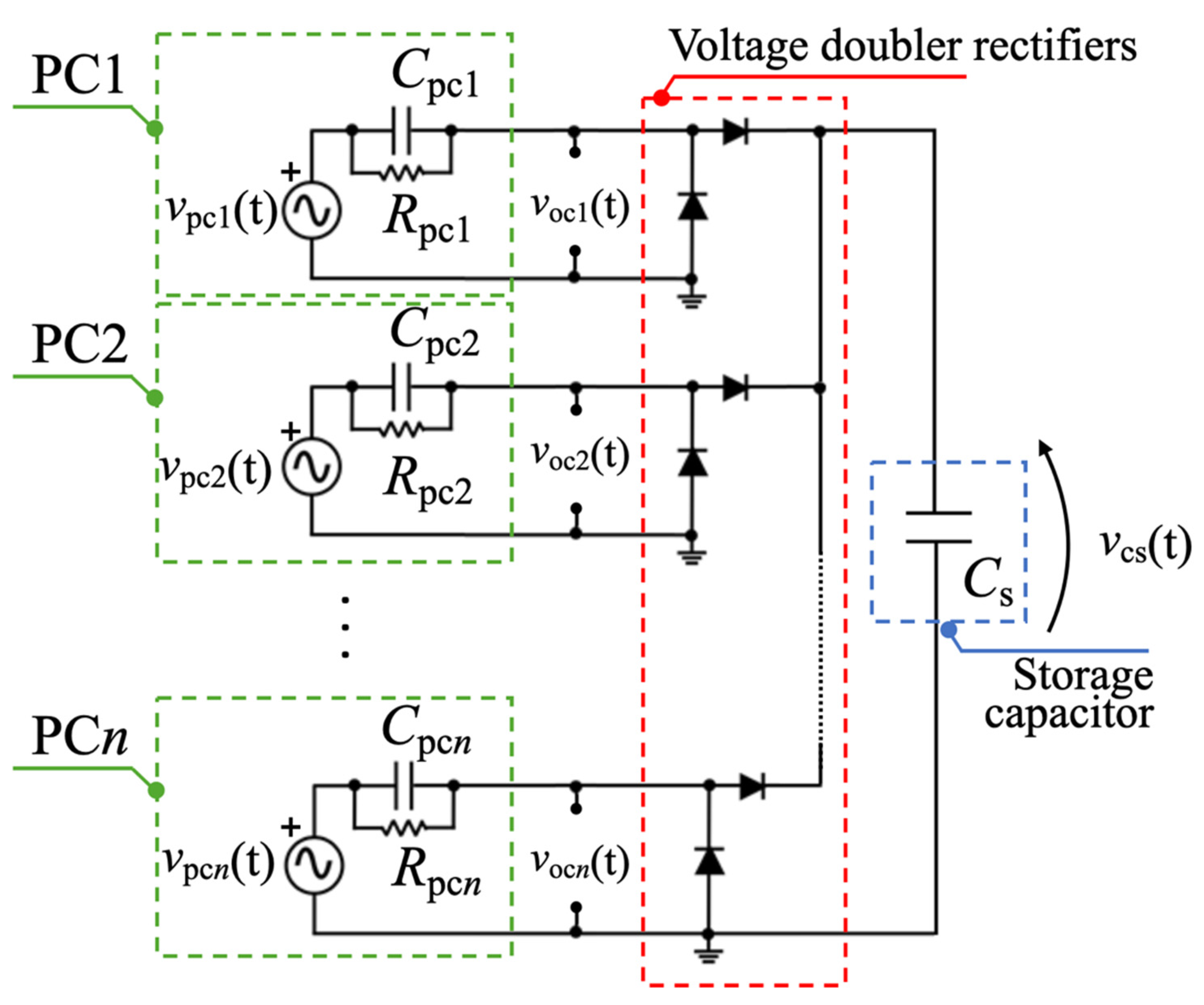
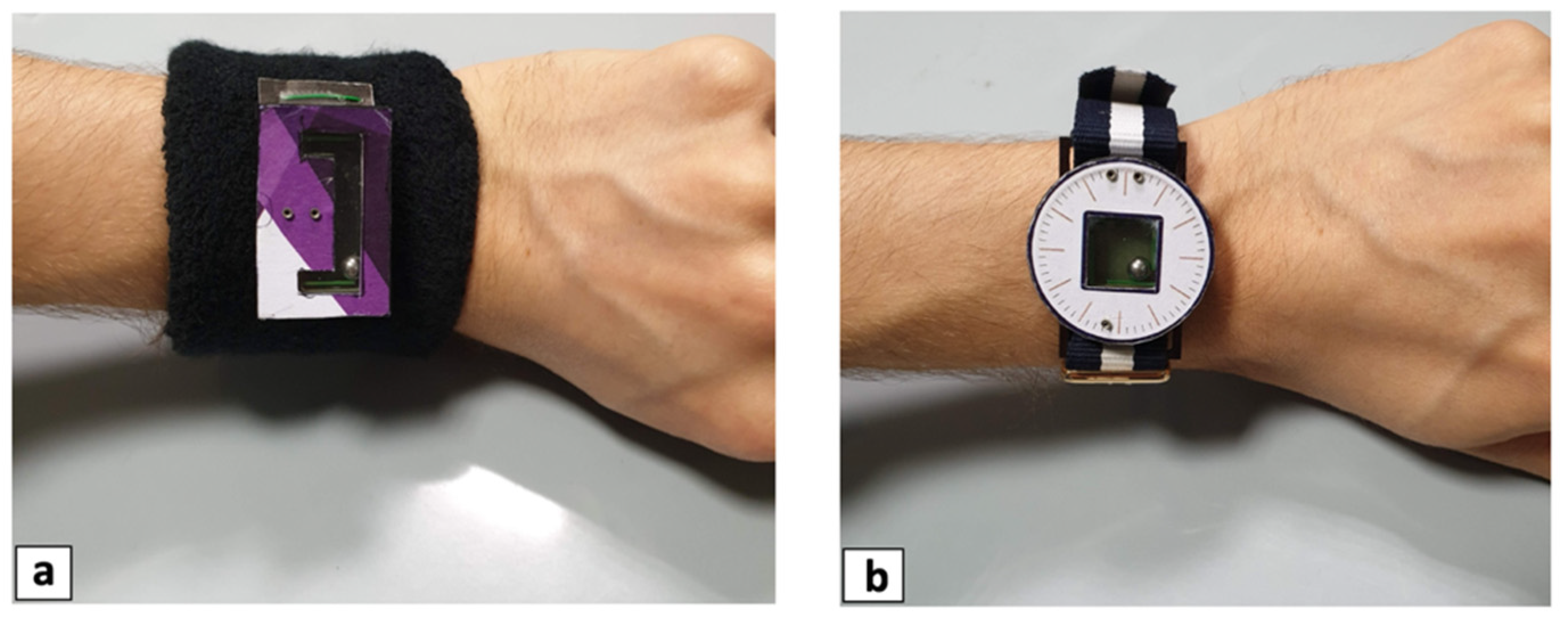
4. Prototypes and Electrical Configurations
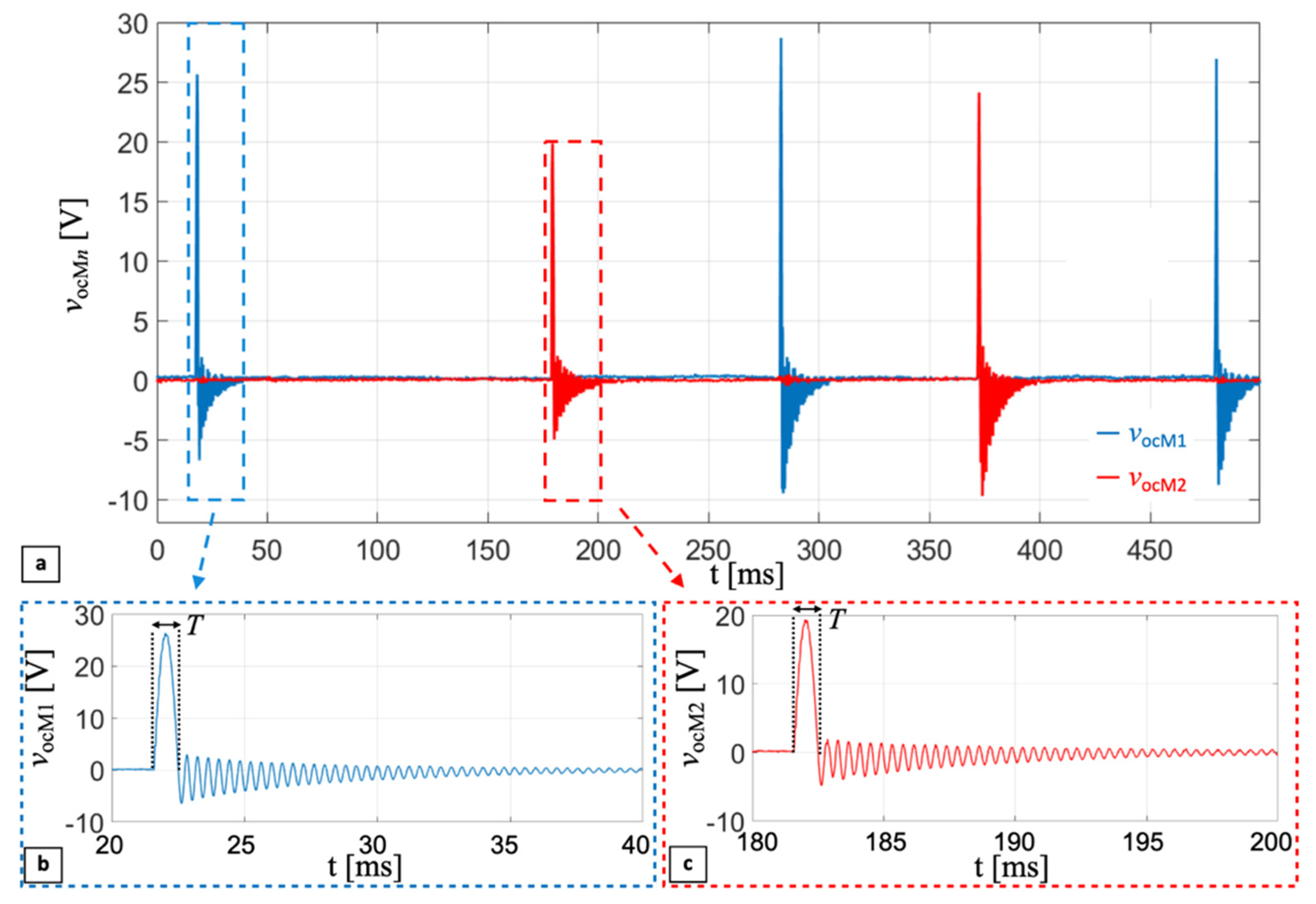
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Grand View Research. Wearable Technology Market Size, Share & Trends Analysis Report by Product (Wrist-Wear, Eye-Wear & Head-Wear, Foot-Wear, Neck-Wear, Body-Wear), by Application, by Region, and Segment Forecasts, 2020–2027. 2020. Available online: https://www.grandviewresearch.com/industry-analysis/wearable-technology-market (accessed on 13 January 2022).
- Zhao, Y.; Wang, B.; Hojaiji, H.; Lin, S.; Lin, H.; Zhu, J.; Yeung, C.; Emaminejad, S. An Adhesive and Corrosion-Resistant Biomarker Sensing Film for Biosmart Wearable Consumer Electronics. JMEMS Lett. 2020, 29, 1112–1114. [Google Scholar] [CrossRef]
- Cascales, J.P.; Roussakis, E.; Witthauer, L.; Goss, A.; Li, X.; Chen, Y.; Marks, H.L.; Evans, C.L. Wearable device for remote monitoring of transcutaneous tissue oxygenation. Biomed. Opt. Express 2020, 11, 14. [Google Scholar] [CrossRef]
- Mazzaracchio, V.; Fiore, L.; Nappi, S.; Marrocco, G.; Arduini, F. Medium-distance affordable, flexible and wireless epidermal sensor for pH monitoring in sweat. Talanta 2021, 222, 10. [Google Scholar] [CrossRef] [PubMed]
- Haghi, M.; Thurow, K.; Stoll, R. Wearable Devices in Medical Internet of Things: Scientific Research and Commercially Available Devices. Healthc. Inform. Res. 2017, 23, 4–15. [Google Scholar] [CrossRef] [PubMed]
- Villani, V.; Righi, M.; Sabattini, L.; Secchi, C. Wearable Devices for the Assessment of Cognitive Effort for Human–Robot Interaction. IEEE Sens. J. 2020, 20, 13047–13056. [Google Scholar] [CrossRef]
- Tang, G.; Shi, Q.; Zhang, Z.; He, T.; Sun, Z.; Lee, C. Hybridized wearable patch as a multi-parameter and multi-functional human-machine interface. Nano Energy 2021, 81, 13. [Google Scholar] [CrossRef]
- Schiewe, A.; Krekhov, A.; Kerber, F.; Daiber, F.; Krüger, J. A Study on Real-Time Visualizations During Sports Activities on Smartwatches. In Proceedings of the 19th International Conference on Mobile and Ubiquitous Multimedia, Essen, Germany, 18–31 November 2020. [Google Scholar] [CrossRef]
- Trung, T.Q.; Lee, N.E. Flexible and stretchable physical sensor integrated platforms for wearable human-activity monitoring and personal healthcare. Adv. Mater. 2016, 28, 4338–4372. [Google Scholar] [CrossRef]
- Maharjan, P.; Toyabur, R.M.; Park, J.Y. A human locomotion inspired hybrid nanogenerator for wrist-wearable electronic device and sensor applications. Nano Energy 2018, 46, 383–395. [Google Scholar] [CrossRef]
- Gemelli, M.; Sakauchi, R.; Block, T.; Scheiermann, S. Low cost MEMS based systems augmenting location and navigation performance in consumer and industrial electronics applications. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 1439–1443. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, D.; Wub, Z.S.; Lei, W. Micro-supercapacitors powered integrated system for flexible electronics Energy. Storage Mater. 2020, 32, 402–417. [Google Scholar] [CrossRef]
- Xiwei, M.; He, Z.; Wenbo, L.; Zisheng, X.; Jiangjiang, D.; Liang, H.; Bin, H.; Jun, Z. Piezoelectrets for wearable energy harvesters and sensors. Nano Energy 2019, 65, 22. [Google Scholar] [CrossRef]
- Srivastava, G.; Dixit, A.; Kumar, A.; Shukla, S. Review of Ultra-Low-Power CMOS Amplifier for Bio-electronic. Adv. Intell. Syst. Comput. 2021, 1168, 432–443. [Google Scholar] [CrossRef]
- Ram, S.K.; Das, B.B.; Pati, B.; Panigrahi, C.; Mahapatra, K.K. SEHS: Solar Energy Harvesting System for IoT Edge Node Devices Progress. Adv. Intell. Syst. Comput. 2021, 1199, 432–443. [Google Scholar] [CrossRef]
- Pellegrinelli, G.; Baù, M.; Cerini, F.; Dalola, S.; Ferrari, M.; Ferrari, V. Portable Energy-Logger Circuit for the Experimental Evaluation of Energy Harvesting Solutions from Motion for Wearable Autonomous Sensors. In Proceedings of the Eurosensors 2014, Brescia, Italy, 7–10 September 2014; Volume 87, pp. 1230–1233. [Google Scholar] [CrossRef]
- Ferrari, M.; Baù, M.; Cerini, F.; Ferrari, V. Impact-Enhanced Multi-Beam Piezoelectric Converter for Energy Harvesting in Autonomous Sensors. In Proceedings of the Eurosensors 2012, Krakow, Poland, 9–12 September 2012; pp. 418–421. [Google Scholar] [CrossRef]
- Ferrari, M.; Ferrari, V.; Guizzetti, M.; Marioli, D. An autonomous battery-less sensor module powered by piezoelectric energy harvesting with RF transmission of multiple measurement signals. Smart Mater. Struct. 2009, 18, 9. [Google Scholar] [CrossRef]
- Erturun, U.; Eisape, A.; West, J.E. Design and analysis of a vibration energy harvester using push-pull electrostatic conversion. Smart Mater. Struct. 2020, 29, 12. [Google Scholar] [CrossRef]
- Tao, Z.; Wu, H.; Li, H.; Li, H.; Xu, T.; Sun, J.; Wang, W. Theoretical model and analysis of an electromagnetic vibration energy harvester with nonlinear damping and stiffness based on 3D MEMS coils. J. Phys. D Appl. Phys. 2020, 53, 12. [Google Scholar] [CrossRef]
- Zhu, D.; Evans, L. Numerical analysis of an electromagnetic energy harvester driven by multiple magnetic forces under pulse excitation. Smart Mater. Struct. 2018, 27, 13. [Google Scholar] [CrossRef]
- Hall, R.G.; Rashidi, R. Multi-Directional Universal Energy Harvesting Ball. Micromachines 2021, 12, 457. [Google Scholar] [CrossRef]
- Pan, H.Y.; Qi, L.F.; Zhang, X.T.; Zhang, Z.T.; Salman, W.; Yuan, Y.P.; Wang, C.B. A portable renewable solar energy-powered cooling system based on wireless power transfer for a vehicle cabin. Appl. Energy 2017, 195, 334–343. [Google Scholar] [CrossRef]
- Wang, Z.L.; Chen, J.; Lin, L. Progress in triboelectric nanogenerators as a new energy technology and self-powered sensors. Energy Environ. Sci. 2015, 8, 2250–2282. [Google Scholar] [CrossRef]
- Bowen, C.R.; Taylor, J.; Leboulbar, E.; Zabek, D.; Chauhan, A.; Vaish, R. Pyroelectric materials and devices for energy harvesting applications. Energy Environ. Sci. 2014, 7, 3836–3856. [Google Scholar] [CrossRef]
- Tang, M.; Guan, Q.; Wu, X.; Zeng, X.; Zhang, Z.; Yuan, Y. A high-efficiency multidirectional wind energy harvester based on impact effect for self-powered wireless sensors in the grid. Smart Mater. Struct. 2019, 28, 13. [Google Scholar] [CrossRef]
- Gafforelli, G.; Ardito, R.; Corigliano, A. Improved one-dimensional model of piezoelectric laminates for energy harvesters including three-dimensional effects. Compos. Struct. 2015, 127, 369–381. [Google Scholar] [CrossRef]
- Ardito, R.; Corigliano, A.; Gafforelli, G.; Valzasina, C.; Procopio, F.; Zafalon, R. Advanced model for fast assessment of piezoelectric micro energy harvesters. Front. Mater. 2016, 3, 9. [Google Scholar] [CrossRef]
- Maamera, B.; Boughamourac, A.; Fath El-Babd, A.M.R.; Francise, L.A.; Tounsi, F. A review on design improvements and techniques for mechanical energy harvesting using piezoelectric and electromagnetic schemes. Energy Convers. Manag. 2019, 199, 23. [Google Scholar] [CrossRef]
- Procopio, F.; Valsazina, C.; Corigliano, A.; Ardito, R.; Gafforelli, G. Piezoelectric Transducer for an Energy-Harvesting System. U.S. Patent US20150035409 A1, 5 February 2015. [Google Scholar]
- Yu, X.; Liang, X.; Krishnamoorthy, R.; Jiang, W.; Zhang, L.; Ma, L.; Zhu, P.; Hu, Y.; Sun, R.; Wong, C.P. Transparent and flexible hybrid nanogenerator with welded silver nanowire networks as the electrodes for mechanical energy harvesting and physiological signal monitoring. Smart Mater. Struct. 2020, 29, 11. [Google Scholar] [CrossRef]
- Lee, M.; Chen, C.Y.; Wang, S.; Cha, S.N.; Park, Y.J.; Kim, J.M.; Chou, L.J.; Wang, Z.L. A hybrid piezoelectric structure for wearable nanogenerators. Adv. Mater. 2012, 24, 1759–1764. [Google Scholar] [CrossRef] [PubMed]
- Baù, M.; Alghisi, D.; Dalola, S.; Ferrari, M.; Ferrari, V. Multi-frequency array of nonlinear piezoelectric converters for vibration energy harvesting. Smart Mater. Struct. 2020, 29, 085047. [Google Scholar] [CrossRef]
- Cai, M.; Liao, W.H. Enhanced electromagnetic wrist-worn energy harvester using repulsive magnetic spring. Mech. Syst. Signal Process. 2021, 150, 17. [Google Scholar] [CrossRef]
- Xiao, H.; Wang, X. A review of piezoelectric vibration energy harvesting techniques. Int. Rev. Mech. Eng. 2014, 8, 609–620. [Google Scholar]
- Yang, G.; Tian, M.Z.; Huang, P.; Fu, Y.F.; Li, Y.Q.; Fu, Y.Q.; Wang, X.Q.; Li, Y.; Hu, N.; Fu, S.Y. Flexible pressure sensor with a tunable pressure-detecting range for various human motions. Carbon 2021, 173, 736–743. [Google Scholar] [CrossRef]
- Mitcheson, P.D.; Green, T.C.; Yeatman, E.M.; Holmes, A.S. Architectures for Vibration-Driven Micropower Generators. J. Microelectromech. Syst. 2004, 13, 429–440. [Google Scholar] [CrossRef]
- Yang, J.; Yin, L.; Tan, J.; Zhao, Z.; Wang, G. Transition mechanism and dynamic behaviors of a multi-stable piezoelectric energy harvester with magnetic interaction. J. Sound Vib. 2021, 501, 116074. [Google Scholar] [CrossRef]
- Cai, M.; Liao, W.H. High Power Density Inertial Energy Harvester Without Additional Proof Mass for Wearables. IEEE Internet Things J. 2020, 8, 297–308. [Google Scholar] [CrossRef]
- Karimpour, H.; Eftekhari, M. Exploiting double jumping phenomenon for broadening bandwidth of an energy harvesting device. Mech. Syst. Signal Process. 2020, 139, 18. [Google Scholar] [CrossRef]
- Gafforelli, G.; Xu, R.; Corigliano, A.; Kim, S.G. Experimental verification of a bridge-shaped, nonlinear vibration energy harvester. Appl. Phys. Lett. 2014, 105, 203901. [Google Scholar] [CrossRef]
- Gafforelli, G.; Xu, R.; Corigliano, A.; Kim, S.G. Modelling of a bridge-shaped nonlinear piezoelectric energy harvester. J. Phys. Conf. Ser. 2014, 476, 179–187. [Google Scholar] [CrossRef]
- Rui, X.; Zhang, Y.; Zeng, Z.; Yue, G.; Huang, X.; Li, J. Design and analysis of a broadband three-beam impact piezoelectric energy harvester for low-frequency rotational motion. Mech. Syst. Signal Process. 2021, 149, 107307. [Google Scholar] [CrossRef]
- Speciale, A.; Ardito, R.; Baù, M.; Ferrari, M.; Ferrari, V.; Frangi, A. Snap-through buckling mechanism for frequency-up conversion in piezoelectric energy harvesting. Appl. Sci. 2020, 10, 3614. [Google Scholar] [CrossRef]
- He, X.; Siong, K.; Li, S.; Dong, L.; Jiang, S. Modeling and experimental verification of an impact-based piezoelectric vibration energy harvester with a rolling proof mass. Sens. Actuators A 2017, 259, 171–179. [Google Scholar] [CrossRef]
- Alghisi, D.; Dalola, S.; Ferrari, M.; Ferrari, V. Triaxial ball-impact piezoelectric converter for autonomous sensors exploiting energy harvesting from vibrations and human motion. Sens. Actuators A 2015, 233, 569–581. [Google Scholar] [CrossRef]
- Yi, Z.; Yang, B.; Zhang, W.; Wu, Y.; Liu, J. Batteryless Tire Pressure Real-Time Monitoring System Driven by an Ultralow Frequency Piezoelectric Rotational Energy Harvester. IEEE Trans. Ind. Electron. 2021, 68, 3192–3201. [Google Scholar] [CrossRef]
- Fang, S.; Wang, S.; Zhou, S.; Yang, Z.; Liao, W.H. Exploiting the advantages of the centrifugal softening effect in rotational impact energy harvesting. Appl. Phys. Lett. 2020, 116, 063903. [Google Scholar] [CrossRef]
- Van Minh, L.; Hara, M.; Oguchi, H.; Kuwano, H. Lead-free (K, Na)NbO3 based impact type energy harvesters integrated with a cylindrical cavity for metal ball. In Proceedings of the IEEE 26th International Conference on Micro Electro Mechanical Systems (MEMS), Taipei, Taiwan, 20–24 January 2013; pp. 833–836. [Google Scholar]
- Fan, G.; Wang, Y.; Tian, F.; Hao, M.; Wen, Y.; Xu, Y.; Zeng, F.; Lu, W. Impact-driven piezoelectric energy harvester using a pendulum structure for low-frequency vibration. J. Intell. Mater. Syst. Struct. 2021, 32, 1997–2005. [Google Scholar] [CrossRef]
- Ferrari, V. Measuring instrumentation. In Applied Structural and Mechanical Vibrations: Theory, Methods and Measuring Instrumentation; Gatti, P.L., Ferrari, V., Eds.; E&FN SPON Taylor & Francis Group: London, UK, 1999. [Google Scholar]
- Umeda, M.; Nakamura, K.; Ueha, S. Analysis of the transformation of mechanical impact energy to electric energy using piezoelectric vibrator. Jpn. J. Appl. Phys. 1996, 35, 1347–4065. [Google Scholar] [CrossRef]
- Kim, J.E. Dedicated algorithm and software for the integrated analysis of AC and DC electrical outputs of piezoelectric vibration energy harvesters. J. Mech. Sci. Technol. 2014, 28, 4027–4036. [Google Scholar] [CrossRef]
- Rosso, M.; Corigliano, A.; Ardito, R. An investigation on the magnetic interaction for frequency up-converting piezoelectric vibration energy harvesters. In Proceedings of the 2021 IEEE 20th International Conference on Micro and Nanotechnology for Power Generation and Energy Conversion Applications (PowerMEMS), Exeter, UK, 6–8 December 2021; pp. 232–235. [Google Scholar]
- Avant, T.; Cruce, J.; Park, G.; Farinholt, K. Evaluation of energy harvesting conditioning circuits. Proc. SPIE 2012, 83430A. [Google Scholar] [CrossRef]
- Ferrari, M.; Ferrari, V.; Guizzetti, M.; Marioli, D. Investigation on electrical output combination options in a piezoelectric multifrequency converter array for energy harvesting in autonomous sensors. In Proceedings of the Sensor Devices 2010, Venice, Italy, 18–25 July 2010; pp. 258–263. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Parameter | Value |
|---|---|---|
| Piezoelectric Converter (PC) | ||
| width | wpc | 1.5 mm |
| height | hpc | 0.6 mm |
| length | lpc | 15 mm |
| capacitance | Cpc | 750 ± 170 pF |
| resistance | Rpc | 1 MΩ |
| Steel Ball | ||
| diameter | db | 5 mm |
| mass | mb | 0.51 g |
| Mono-Axial Harvester | ||
| length | lma | 40 mm |
| width | wma | 25.5 mm |
| height | hma | 8 mm |
| parallelepiped length | lpma | 25.8 mm |
| parallelepiped width | wpma | 6 mm |
| parallelepiped height | hpma | 6.4 mm |
| PC length exposed to impact | lpc0 | 2.5 mm |
| Bi-Axial Harvester | ||
| length | lba | 44 mm |
| height | hba | 8 mm |
| diameter | dba | 36 mm |
| parallelepiped side | spba | 11.6 mm |
| parallelepiped height | hpba | 6.4 mm |
| PC length exposed to impact | lpc0 | 8.05 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nastro, A.; Pienazza, N.; Baù, M.; Aceti, P.; Rouvala, M.; Ardito, R.; Ferrari, M.; Corigliano, A.; Ferrari, V. Wearable Ball-Impact Piezoelectric Multi-Converters for Low-Frequency Energy Harvesting from Human Motion. Sensors 2022, 22, 772. https://doi.org/10.3390/s22030772
Nastro A, Pienazza N, Baù M, Aceti P, Rouvala M, Ardito R, Ferrari M, Corigliano A, Ferrari V. Wearable Ball-Impact Piezoelectric Multi-Converters for Low-Frequency Energy Harvesting from Human Motion. Sensors. 2022; 22(3):772. https://doi.org/10.3390/s22030772
Chicago/Turabian StyleNastro, Alessandro, Nicola Pienazza, Marco Baù, Pietro Aceti, Markku Rouvala, Raffaele Ardito, Marco Ferrari, Alberto Corigliano, and Vittorio Ferrari. 2022. "Wearable Ball-Impact Piezoelectric Multi-Converters for Low-Frequency Energy Harvesting from Human Motion" Sensors 22, no. 3: 772. https://doi.org/10.3390/s22030772
APA StyleNastro, A., Pienazza, N., Baù, M., Aceti, P., Rouvala, M., Ardito, R., Ferrari, M., Corigliano, A., & Ferrari, V. (2022). Wearable Ball-Impact Piezoelectric Multi-Converters for Low-Frequency Energy Harvesting from Human Motion. Sensors, 22(3), 772. https://doi.org/10.3390/s22030772