
Research on the Fault Diagnosis Method of an Internal Gear Pump Based on a Convolutional Auto-Encoder and PSO-LSSVM

Abstract
:1. Introduction
2. Proposed Method
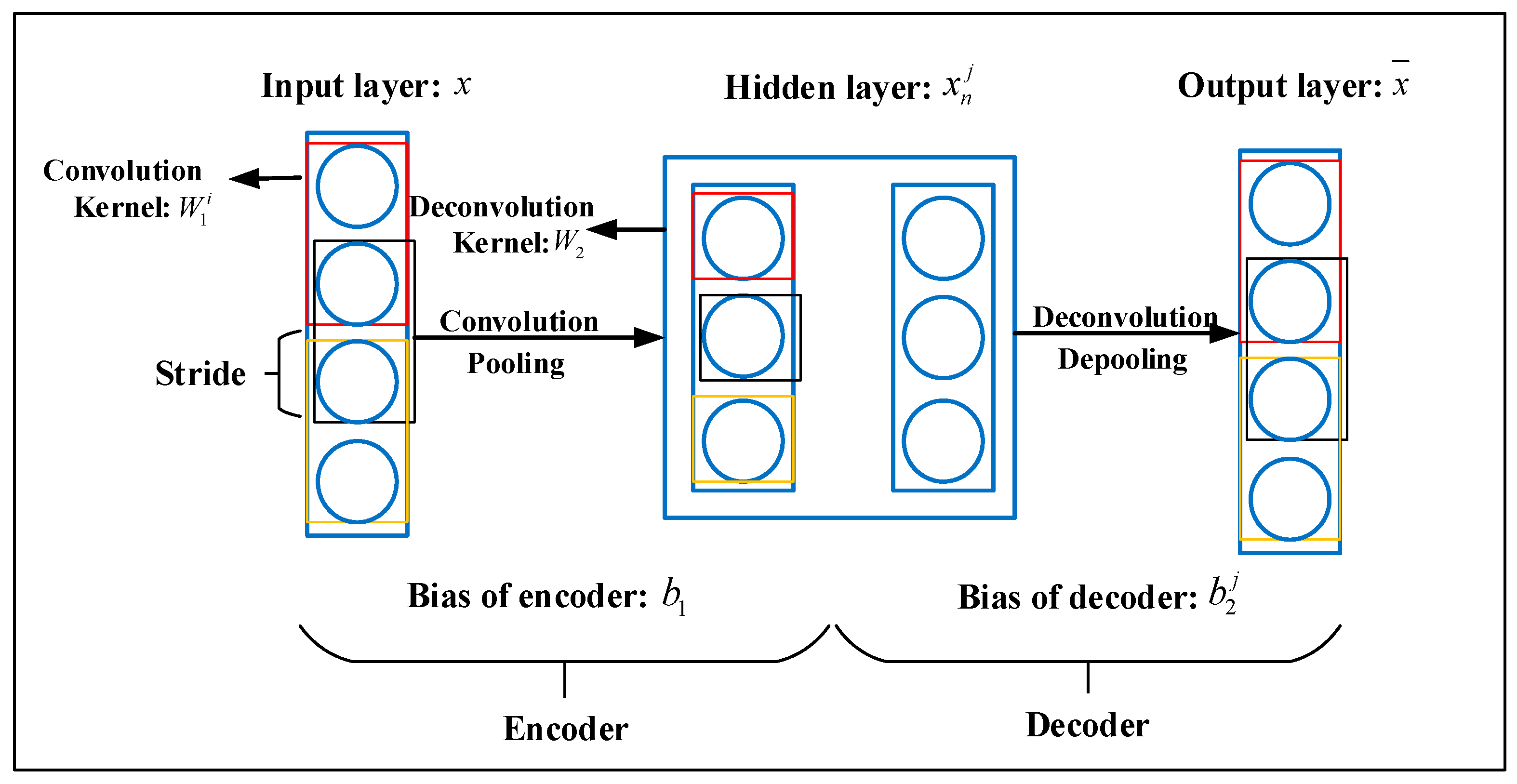
2.1. Convolutional Auto-Encoder
2.2. Multi-Scale Permutation Entropy
2.3. Particle Swarm Optimization–Least Squares Support Vector Machine
3. Fault Diagnosis Model for Internal Gear Pumps
4. Experiments and Results
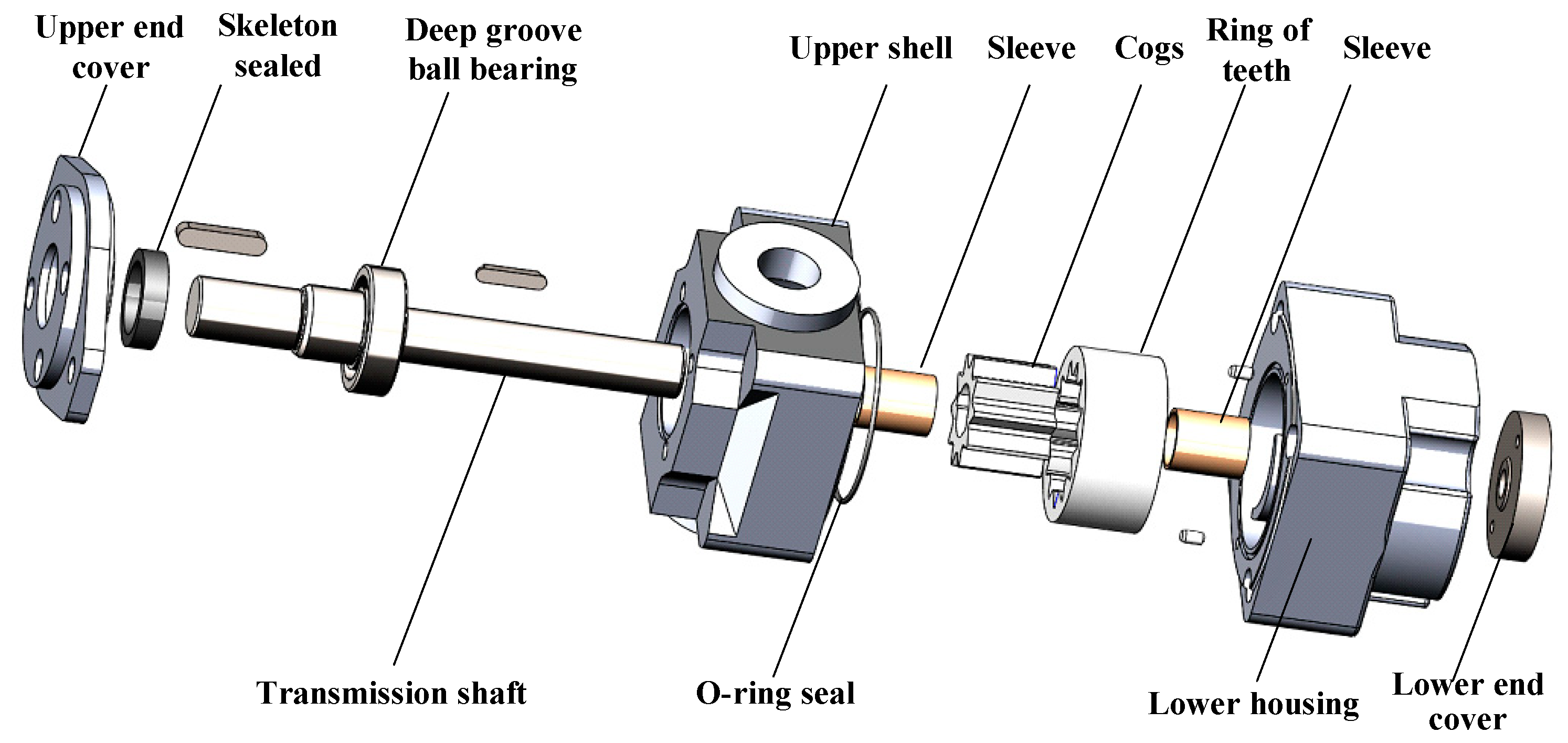
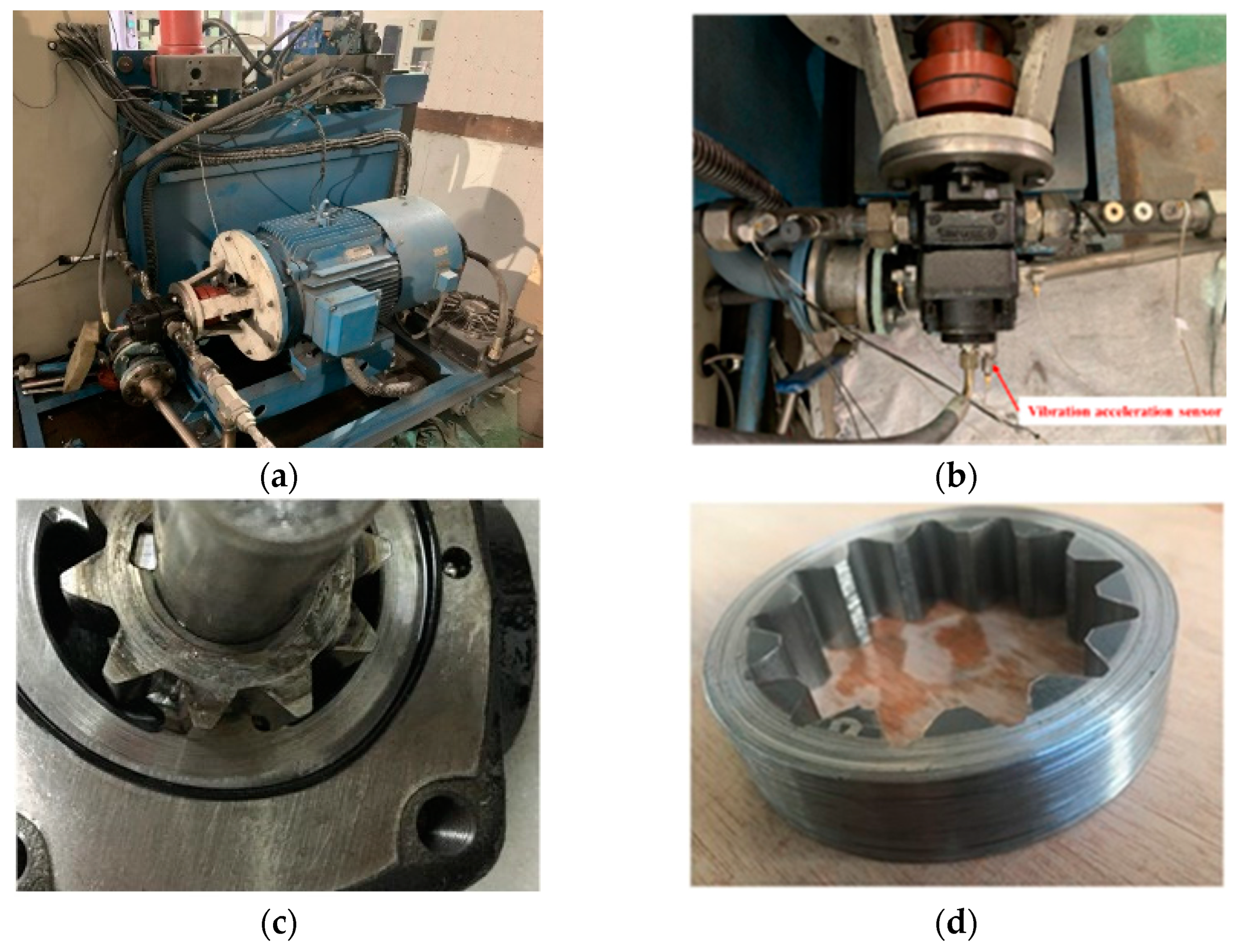
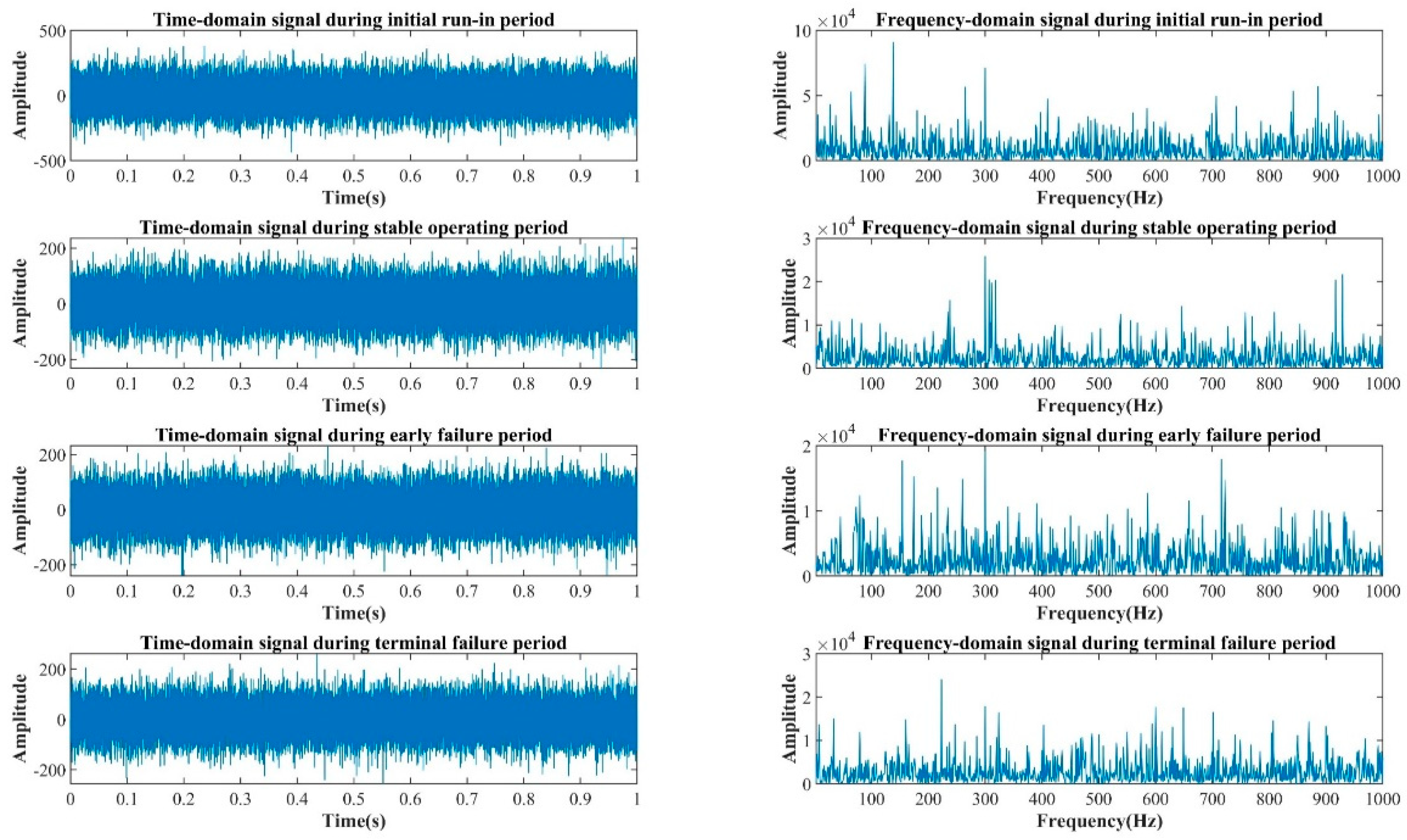
4.1. Accelerated Life Testing
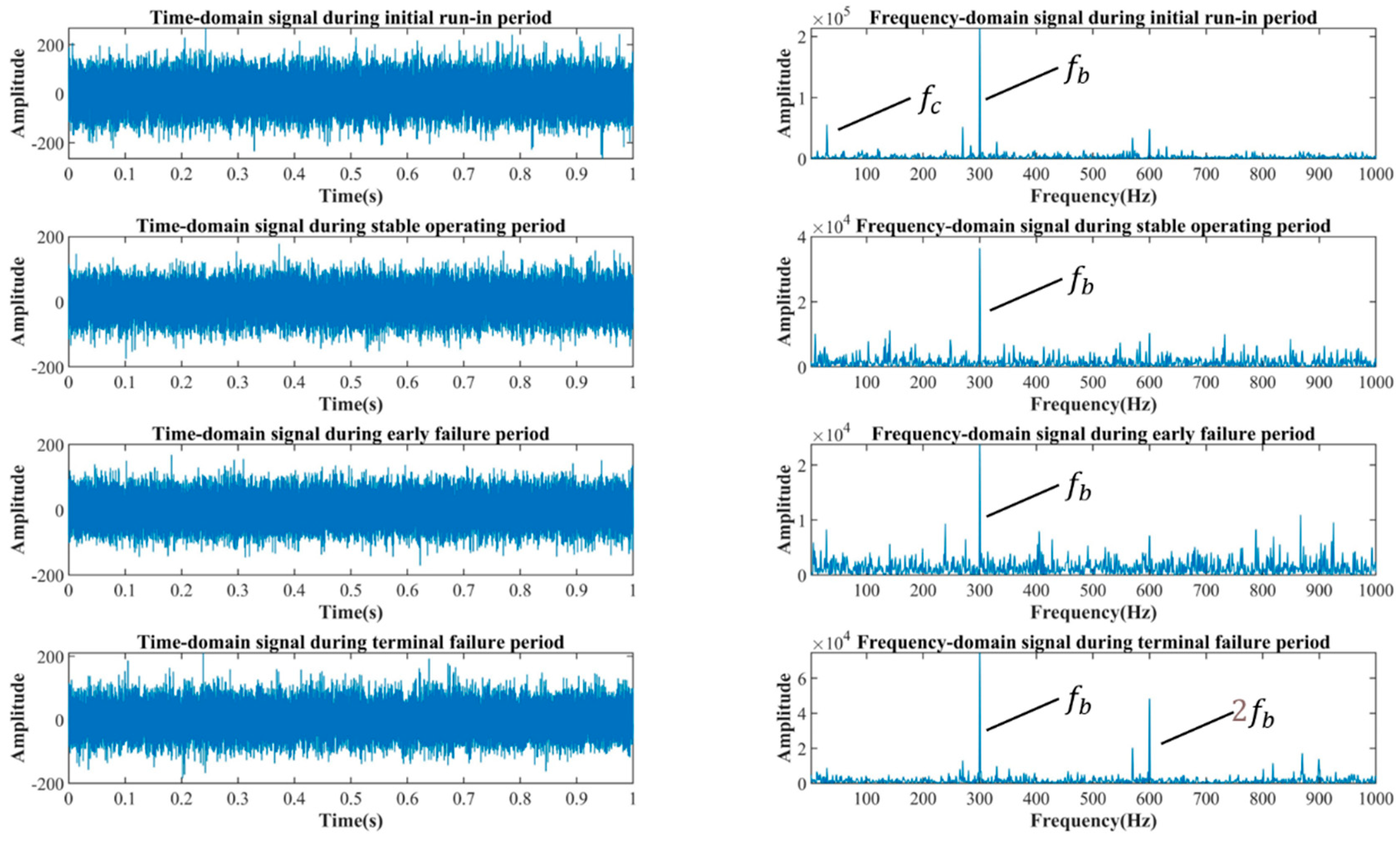
4.2. CAE-Based Signal Preprocessing
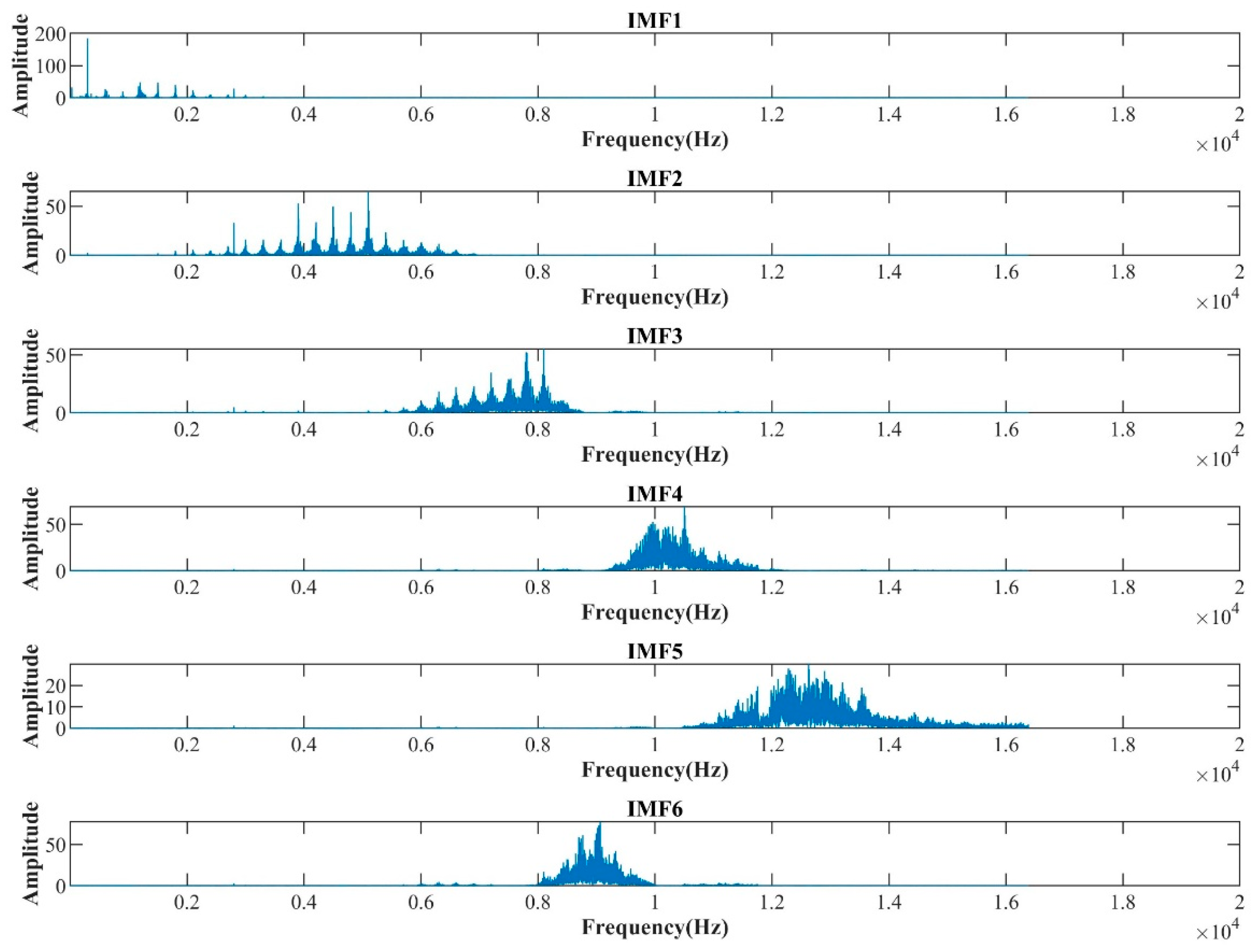
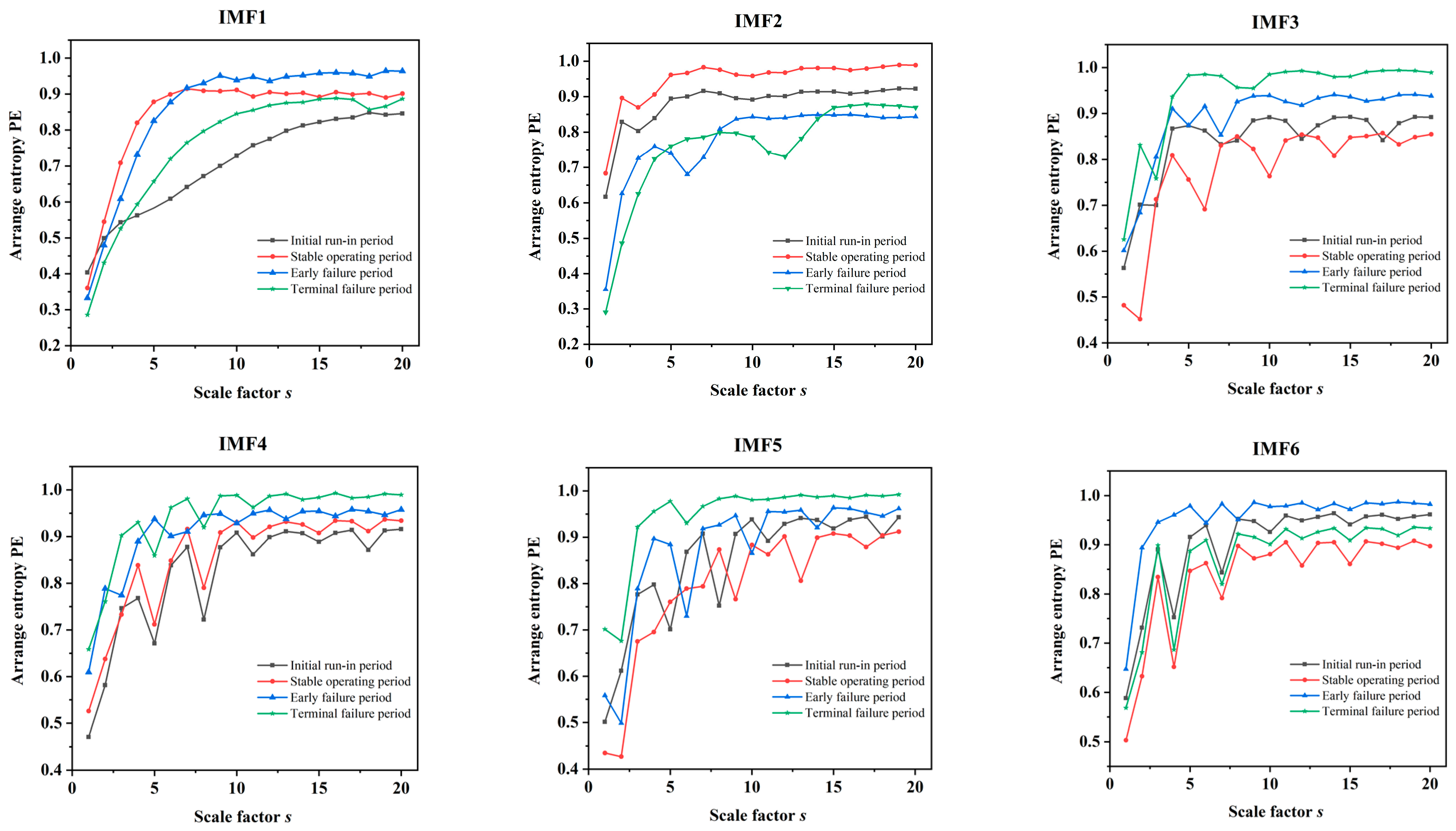
4.3. VMD–MPE-Based Signal Feature Extraction
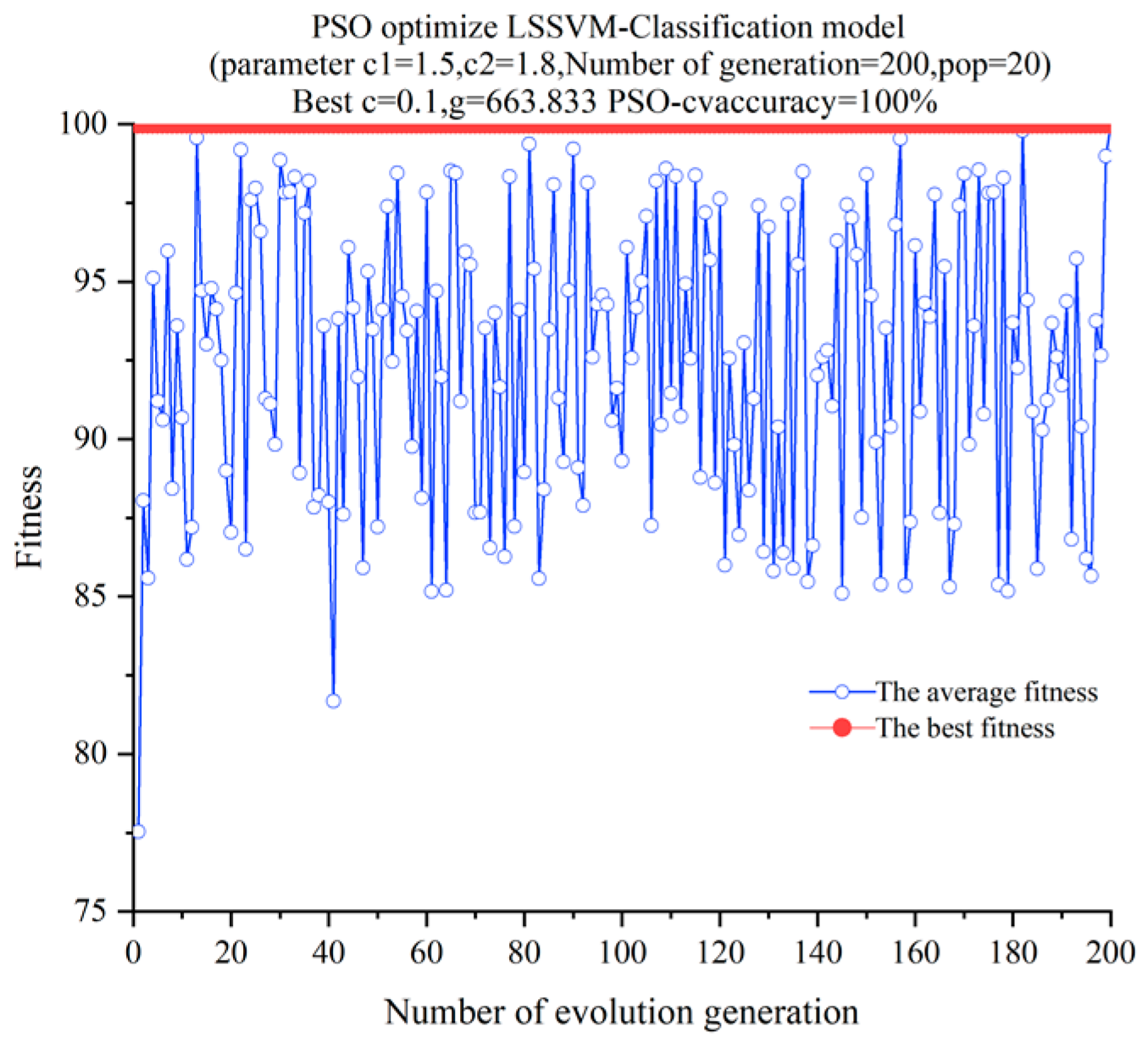
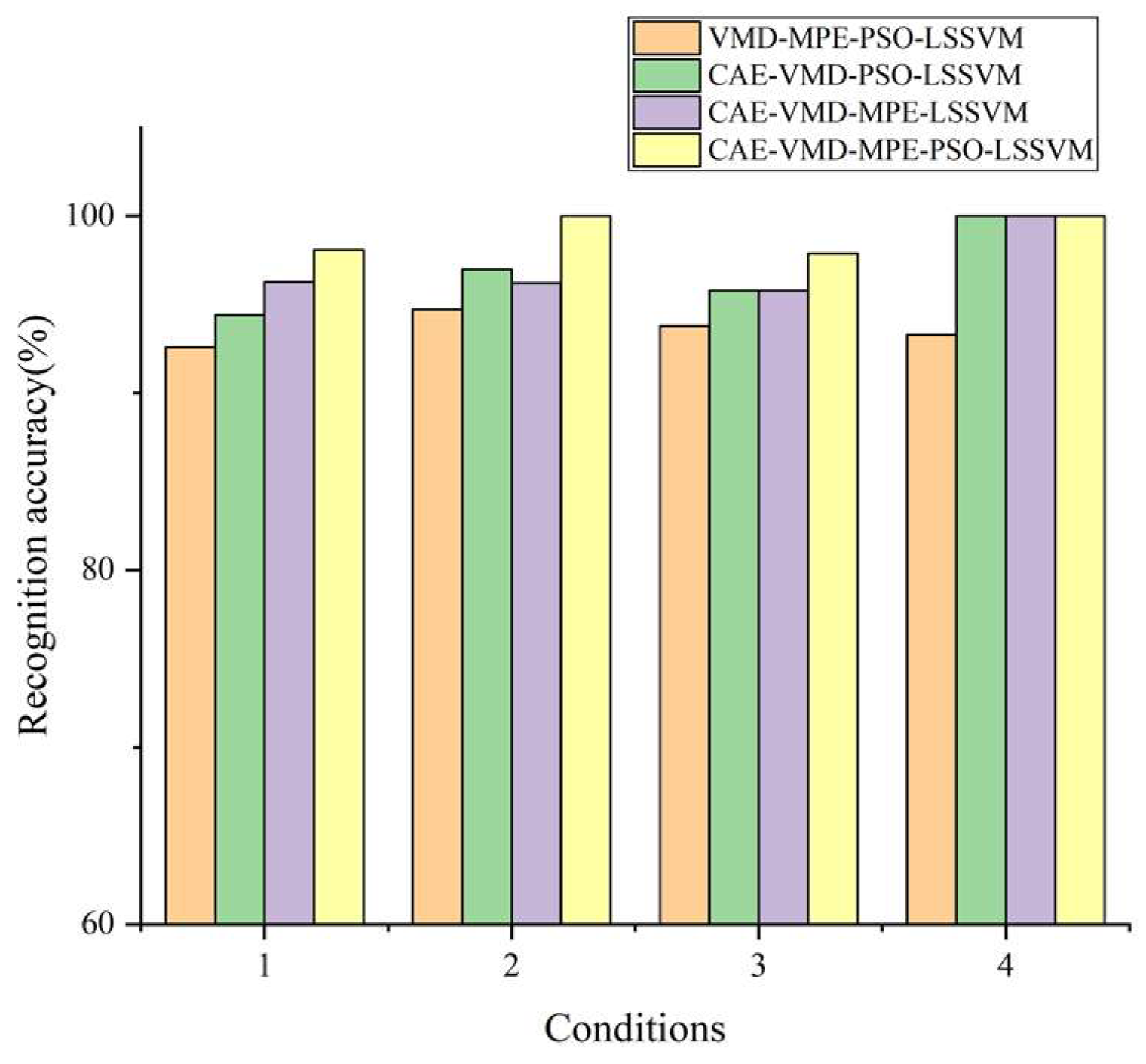
4.4. PSO–LSSVM-Based Pattern Recognition
5. Conclusions
- (1)
- The CAE–VMD–MPE–PSO–LSSVM fault diagnosis model accurately determined the operating state of the internal gear pump; consequently, accurate fault diagnosis was accomplished. A comparative analysis revealed that the proposed method for diagnosing faults in internal gear pumps is more effective and accurate than other methods.
- (2)
- Utilizing a CAE to preprocess the raw signal of an internal gear pump in an environment with complex noise exhibits a positive effect. Effectively suppressing background noise and enhancing operating state features lays a solid foundation for subsequent feature extraction and pattern recognition.
- (3)
- A comparison of the MPE values of the internal gear pump during different operating periods demonstrates that the MPE method is robust and anti-interference is strong, and the signal can be analyzed at various time scales. Therefore, it is possible to accurately characterize the operating state of the internal gear pump.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Gao, Z.; Huo, B.; Zhang, J.; Jiang, Z. Failure investigation of gear teeth fracture of seawater pump in a diesel engine. Eng. Fail. Anal. 2019, 105, 1079–1092. [Google Scholar] [CrossRef]
- Zongbin, C.; Lin, H.; Jian, L. Design and Analysis of Conjugated Straight-Line Internal Gear Pairs. Int. J. Precis. Eng. Manuf. 2021, 22, 1402–1440. [Google Scholar] [CrossRef]
- Escudero, R.; Noel, J.; Elizondo, J.; Kirtley, J. Microgrid fault detection based on wavelet transformation and Park’s vector approach. Electr. Power Syst. Res. 2017, 152, 401–410. [Google Scholar] [CrossRef]
- Al Tobi, M.; Bevan, G.; Wallace, P.; Harrison, D.; Okedu, K.E. Faults diagnosis of a centrifugal pump using multilayer perceptron genetic algorithm back propagation and support vector machine with discrete wavelet transform-based feature extraction. Comput. Intell. 2021, 37, 21–46. [Google Scholar] [CrossRef]
- Tang, B.; Liu, W.; Song, T. Wind turbine fault diagnosis based on Morlet wavelet transformation and Wigner-Ville distribution. Renew. Energy 2010, 35, 2862–2866. [Google Scholar] [CrossRef]
- Gao, M.; Yu, G.; Wang, T. Impulsive Gear Fault Diagnosis Using Adaptive Morlet Wavelet Filter Based on Alpha-Stable Distribution and Kurtogram. IEEE Access 2019, 7, 72283–72296. [Google Scholar] [CrossRef]
- Wang, J.; Du, G.; Zhu, Z.; Shen, C.; He, Q. Fault diagnosis of rotating machines based on the EMD manifold. Mech. Syst. Signal Process. 2020, 135, 106443. [Google Scholar] [CrossRef]
- Cheng, J.; Yu, D.; Yu, Y. The application of energy operator demodulation approach based on EMD in machinery fault diagnosis. Mech. Syst. Signal Process. 2017, 21, 668–677. [Google Scholar]
- Zhao, X.; Patel, T.H.; Zuo, M.J. Multivariate EMD and full spectrum based condition monitoring for rotating machinery. Mech. Syst. Signal Process. 2012, 27, 712–728. [Google Scholar] [CrossRef]
- Ni, Q.; Ji, J.; Feng, K.; Halkon, B. A fault information-guided variational mode decomposition (FIVMD) method for rolling element bearings diagnosis. Mech. Syst. Signal Process. 2021, 164, 108216. [Google Scholar] [CrossRef]
- Ma, S.; Chu, F. Ensemble deep learning-based fault diagnosis of rotor bearing systems. Comput. Ind. 2018, 105, 143–152. [Google Scholar] [CrossRef]
- Liu, S.; Jiang, H.; Wu, Z.; Li, X. Rolling bearing fault diagnosis using variational autoencoding generative adversarial networks with deep regret analysis. Measurement 2020, 168, 108371. [Google Scholar] [CrossRef]
- Hao, S.; Ge, F.X.; Li, Y.; Jiang, J. Multisensor Bearing Fault Diagnosis Based on One-dimensional Convolutional Long Short-Term Memory Networks. Measurement 2020, 159, 107802. [Google Scholar] [CrossRef]
- Fang, Z.; Jia, T.; Chen, Q.; Xu, M.; Yuan, X.; Wu, C. Laser stripe image denoising using convolutional autoencoder. Results Phys. 2018, 11, 96–104. [Google Scholar] [CrossRef]
- Lee, D.; Choi, S.; Kim, H.-J. Performance evaluation of image denoising developed using convolutional denoising autoencoders in chest radiography. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrom. Detect. Assoc. Equip. 2018, 884, 97–104. [Google Scholar] [CrossRef]
- Yang, D.; Karimi, H.R.; Sun, K. Residual wide-kernel deep convolutional auto-encoder for intelligent rotating machinery fault diagnosis with limited samples. Neural Netw. 2021, 141, 133–144. [Google Scholar] [CrossRef] [PubMed]
- Prosvirin, A.E.; Ahmad, Z.; Kim, J.M. Global and Local Feature Extraction Using a Convolutional Autoencoder and Neural Net-works for Diagnosing Centrifugal Pump Mechanical Faults. IEEE Access 2021, 9, 65838–65854. [Google Scholar] [CrossRef]
- Qian, Q.; Qin, Y.; Wang, Y.; Liu, F. A new deep transfer learning network based on convolutional auto-encoder for mechanical fault diagnosis. Measurement 2021, 178, 109352. [Google Scholar] [CrossRef]
- Yang, C.; Jia, M. Hierarchical multiscale permutation entropy-based feature extraction and fuzzy support tensor machine with pinball loss for bearing fault identification—ScienceDirect. Mech. Syst. Signal Process. 2021, 149, 107182. [Google Scholar] [CrossRef]
- Zhao, D.; Liu, S.; Gu, D.; Sun, X.; Wang, L.; Wei, Y.; Zhang, H. Improved multi-scale entropy and it’s application in rolling bearing fault feature extraction. Measurement 2019, 152, 107361. [Google Scholar] [CrossRef]
- Tan, H.; Xie, S.; Liu, R.; Ma, W. Bearing fault identification based on stacking modified composite multiscale dispersion entropy and optimised support vector machine. Measurement 2021, 186, 110180. [Google Scholar] [CrossRef]
- Zheng, J.; Dong, Z.; Pan, H.; Ni, Q.; Liu, T.; Zhang, J. Composite multi-scale weighted permutation entropy and extreme learning machine based intelligent fault diagnosis for rolling bearing. Measurement 2019, 143, 69–80. [Google Scholar] [CrossRef]
- Chen, W.; Li, J.; Wang, Q.; Han, K. Fault Feature Extraction and Diagnosis of Rolling Bearings Based on Wavelet Thresholding Denoising with CEEMDAN Energy Entropy and PSO-LSSVM. Measurement 2020, 172, 108901. [Google Scholar] [CrossRef]
- Liu, S.; Zhao, R.; Yu, K.; Liao, B.; Zheng, B. A novel real-time modal analysis method for operational time-varying structural systems based on short-time extension of multivariate VMD. Structures 2022, 37, 389–402. [Google Scholar] [CrossRef]
- Wang, Z.; Yao, L.; Chen, G.; Ding, J. Modified multiscale weighted permutation entropy and optimized support vector machine method for rolling bearing fault diagnosis with complex signals. ISA Trans. 2021, 114, 470–484. [Google Scholar] [CrossRef]
- Xu, H.; Chen, G. An intelligent fault identification method of rolling bearings based on LSSVM optimized by im-proved PSO. Mech. Syst. Signal Process. 2013, 35, 167–175. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Layer | Receptive Field Size/Stride/Number of Channels | Activation Function |
|---|---|---|---|
| Block1 | Convolution | (3, 3)/1/32 | ReLU |
| Block2 | Pooling | (2, 2)/2/32 | ReLU |
| Block3 | Convolution | (3, 3)/1/64 | ReLU |
| Block4 | Pooling | (2, 2)/2/64 | ReLU |
| Block5 | Convolution | (3, 3)/1/128 | ReLU |
| Block6 | Pooling | (2, 2)/2/128 | ReLU |
| Block7/Block11 | FC | 1/*/1024 | ReLU |
| Block8/Block10 | FC | 1/*/512 | ReLU |
| Block9 | FC | 1/*/128 | Sigmoid |
| Block12 | Deconvolution | (3, 3)/1/64 | ReLU |
| Block13 | Deconvolution | (3, 3)/1/32 | ReLU |
| Block14 | Deconvolution | (3, 3)/1/1 | Sigmoid |
| Displacement | Maximum Speed | Rated Pressure | Maximum Torque |
|---|---|---|---|
| 20 mL/r | 3000 rpm | 16 MPa | 50 Nm |
| Life Cycle Classification | Performance Tests | Number of Datasets × Dataset Size |
|---|---|---|
| Initial run-in period | [1–9] | 270 × 32,768 |
| Stable operating period | [10–31] | 660 × 32,768 |
| Early failure period | [32–39] | 240 × 32,768 |
| Terminal failure period | 40 | 30 × 32,768 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, J.; Zheng, J.; Chen, Z. Research on the Fault Diagnosis Method of an Internal Gear Pump Based on a Convolutional Auto-Encoder and PSO-LSSVM. Sensors 2022, 22, 9841. https://doi.org/10.3390/s22249841
Liao J, Zheng J, Chen Z. Research on the Fault Diagnosis Method of an Internal Gear Pump Based on a Convolutional Auto-Encoder and PSO-LSSVM. Sensors. 2022; 22(24):9841. https://doi.org/10.3390/s22249841
Chicago/Turabian StyleLiao, Jian, Jianbo Zheng, and Zongbin Chen. 2022. "Research on the Fault Diagnosis Method of an Internal Gear Pump Based on a Convolutional Auto-Encoder and PSO-LSSVM" Sensors 22, no. 24: 9841. https://doi.org/10.3390/s22249841
APA StyleLiao, J., Zheng, J., & Chen, Z. (2022). Research on the Fault Diagnosis Method of an Internal Gear Pump Based on a Convolutional Auto-Encoder and PSO-LSSVM. Sensors, 22(24), 9841. https://doi.org/10.3390/s22249841