

Joint Estimation of Mass and Center of Gravity Position for Distributed Drive Electric Vehicles Using Dual Robust Embedded Cubature Kalman Filter


Abstract
:1. Introduction
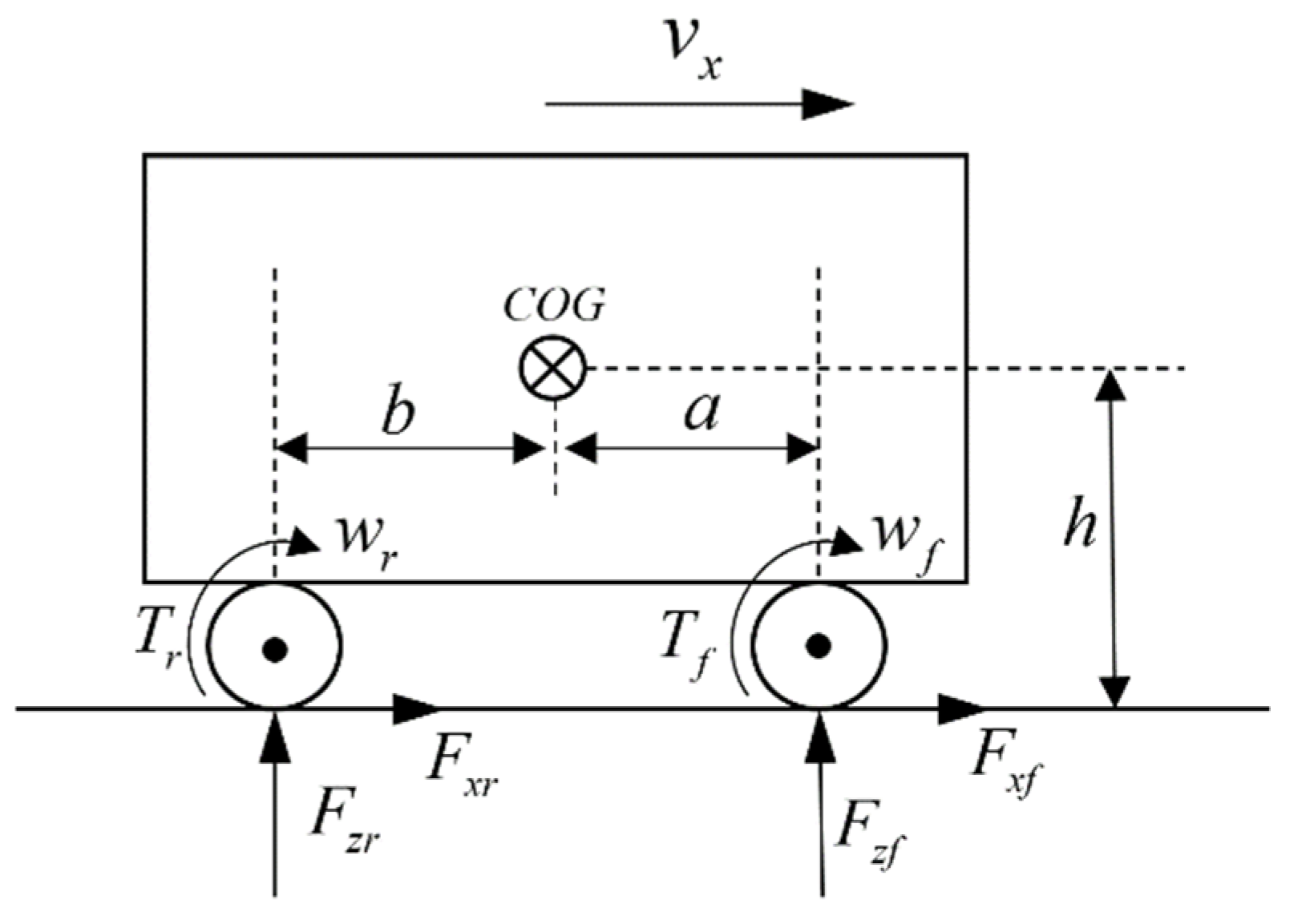
2. Vehicle Model and Problem Formulation
3. Methodology
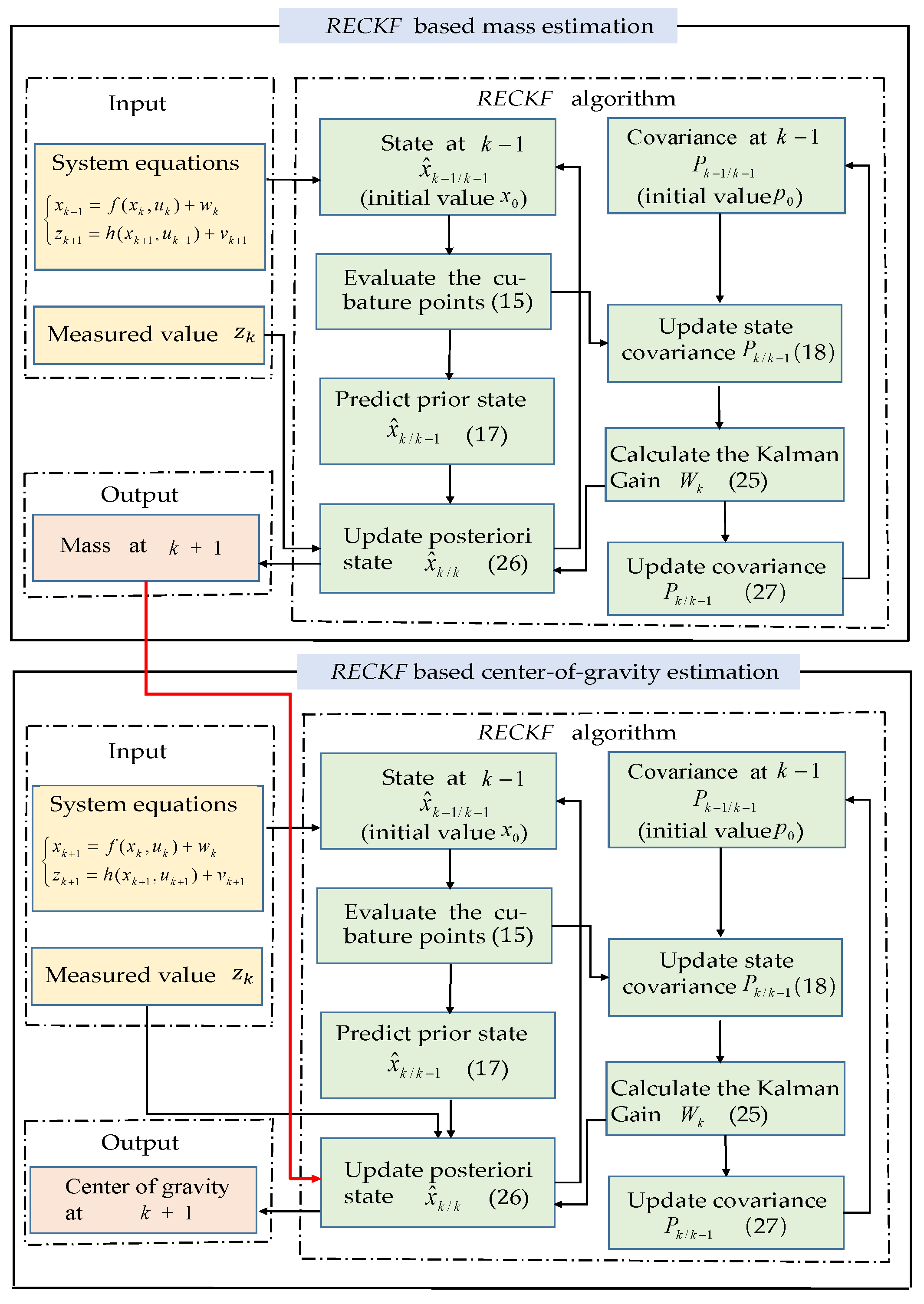
3.1. The RECKF
- (1)
- Initialization:
- (2)
- Time prediction:
- (3)
- Measurement prediction:
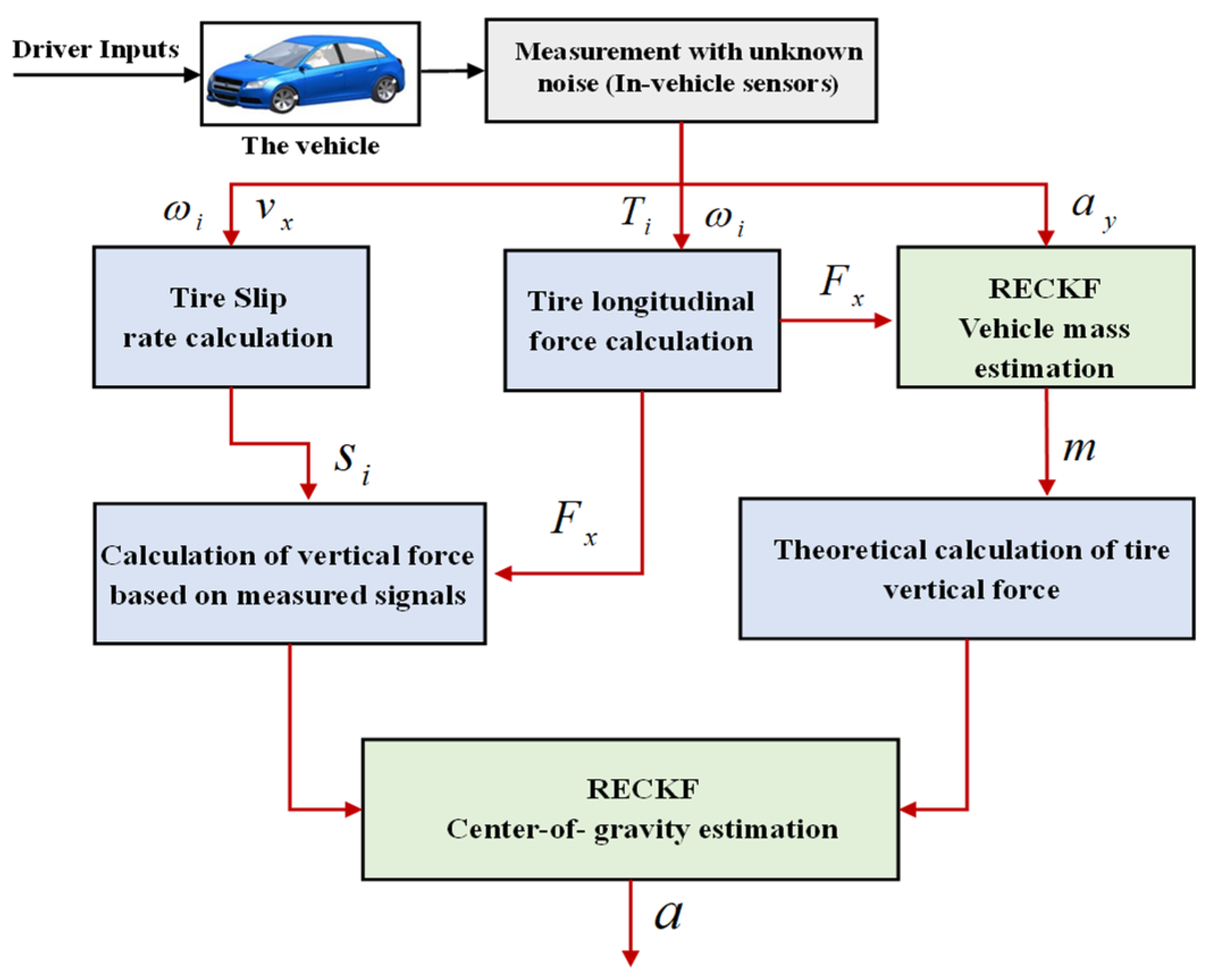
3.2. The Flowchart of Joint Estimation
4. Results and Discussion
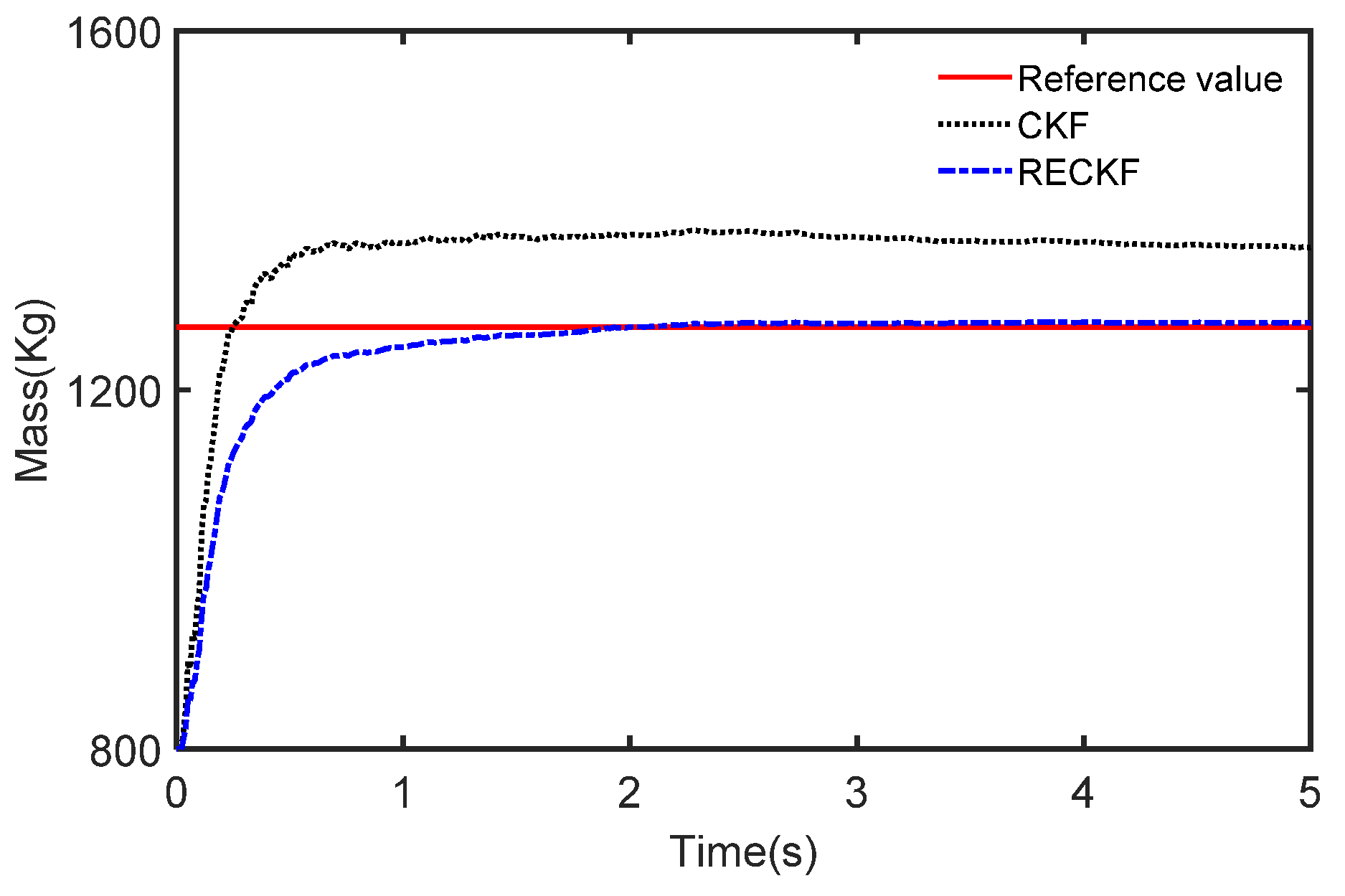
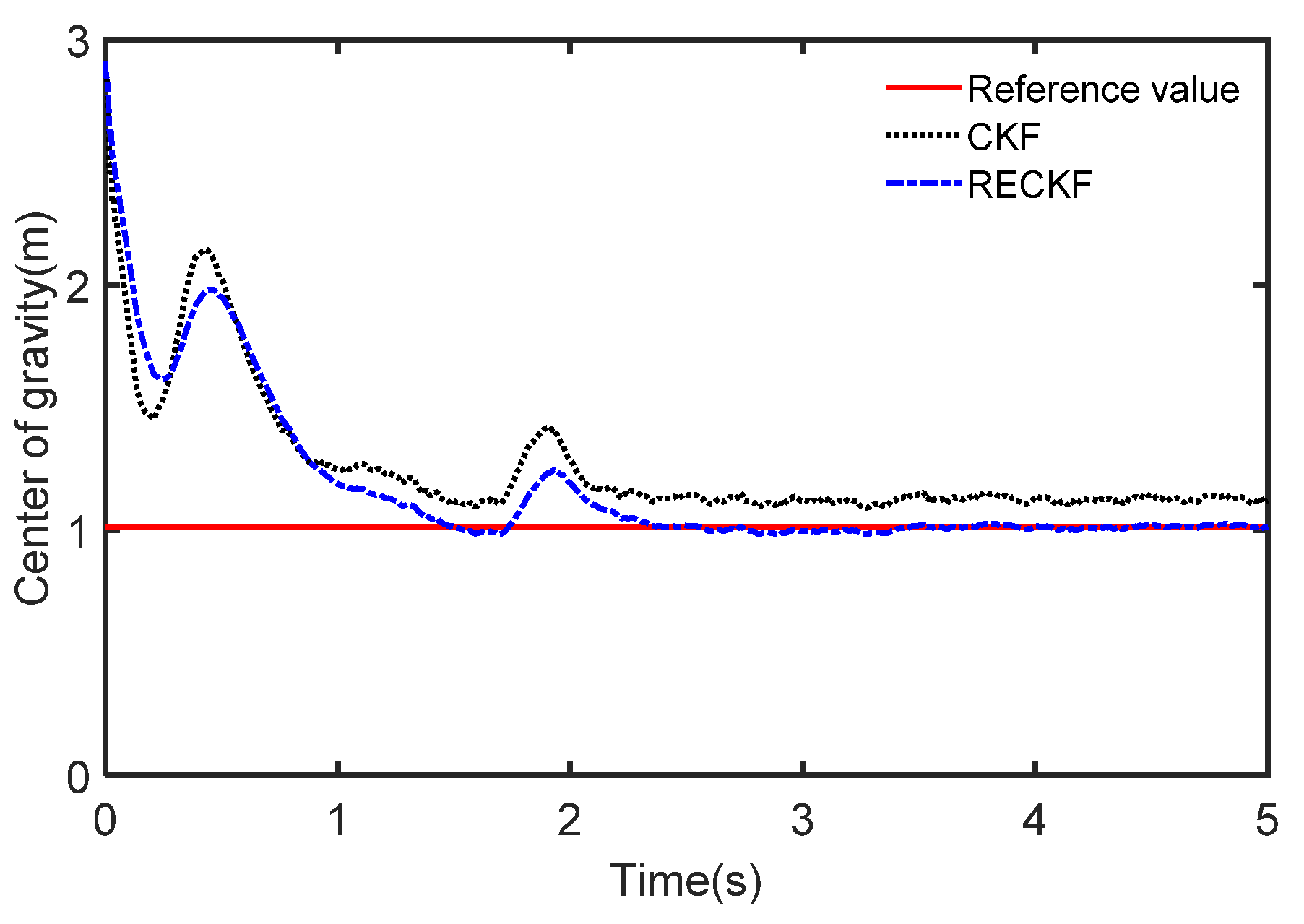
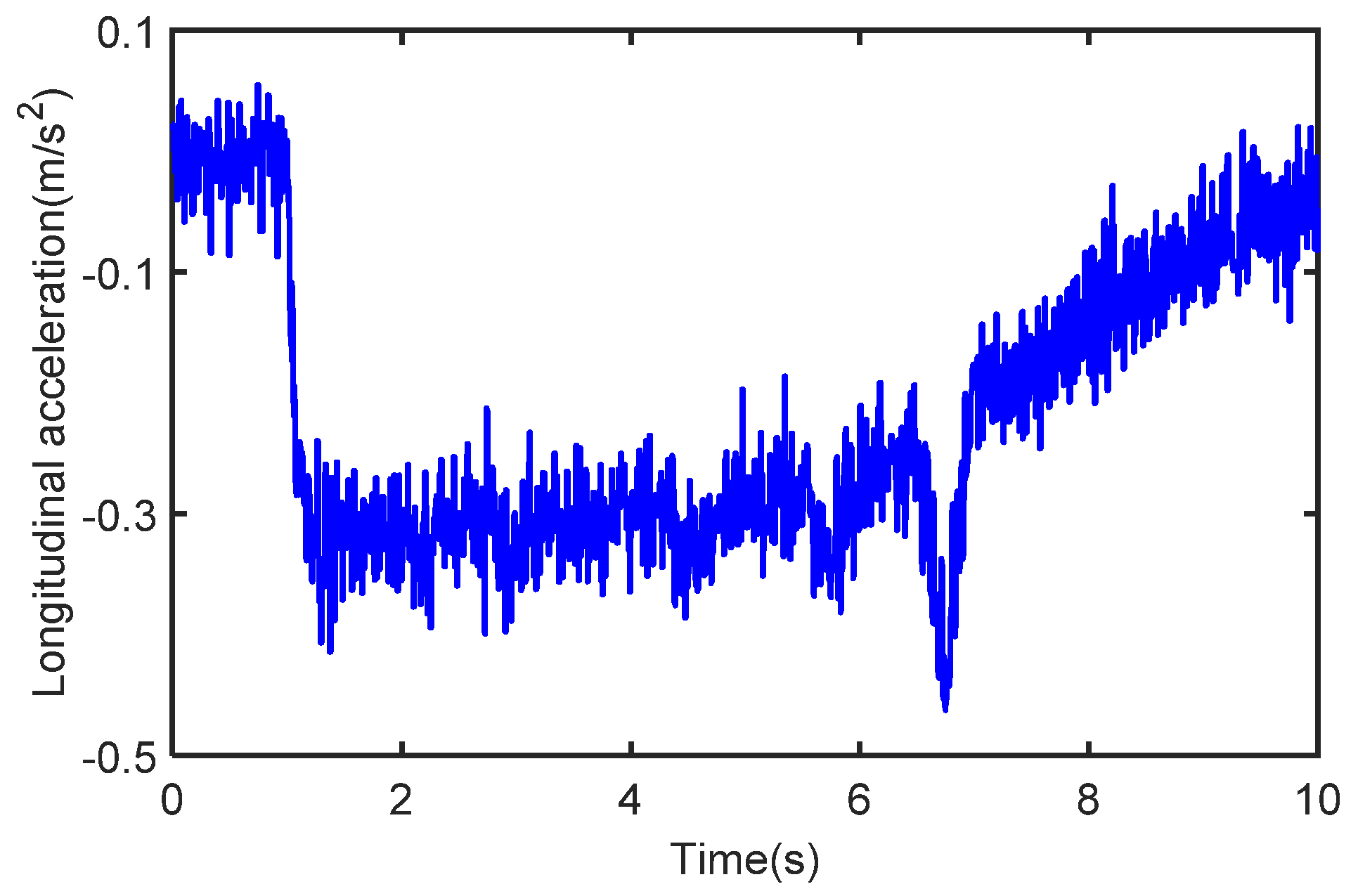
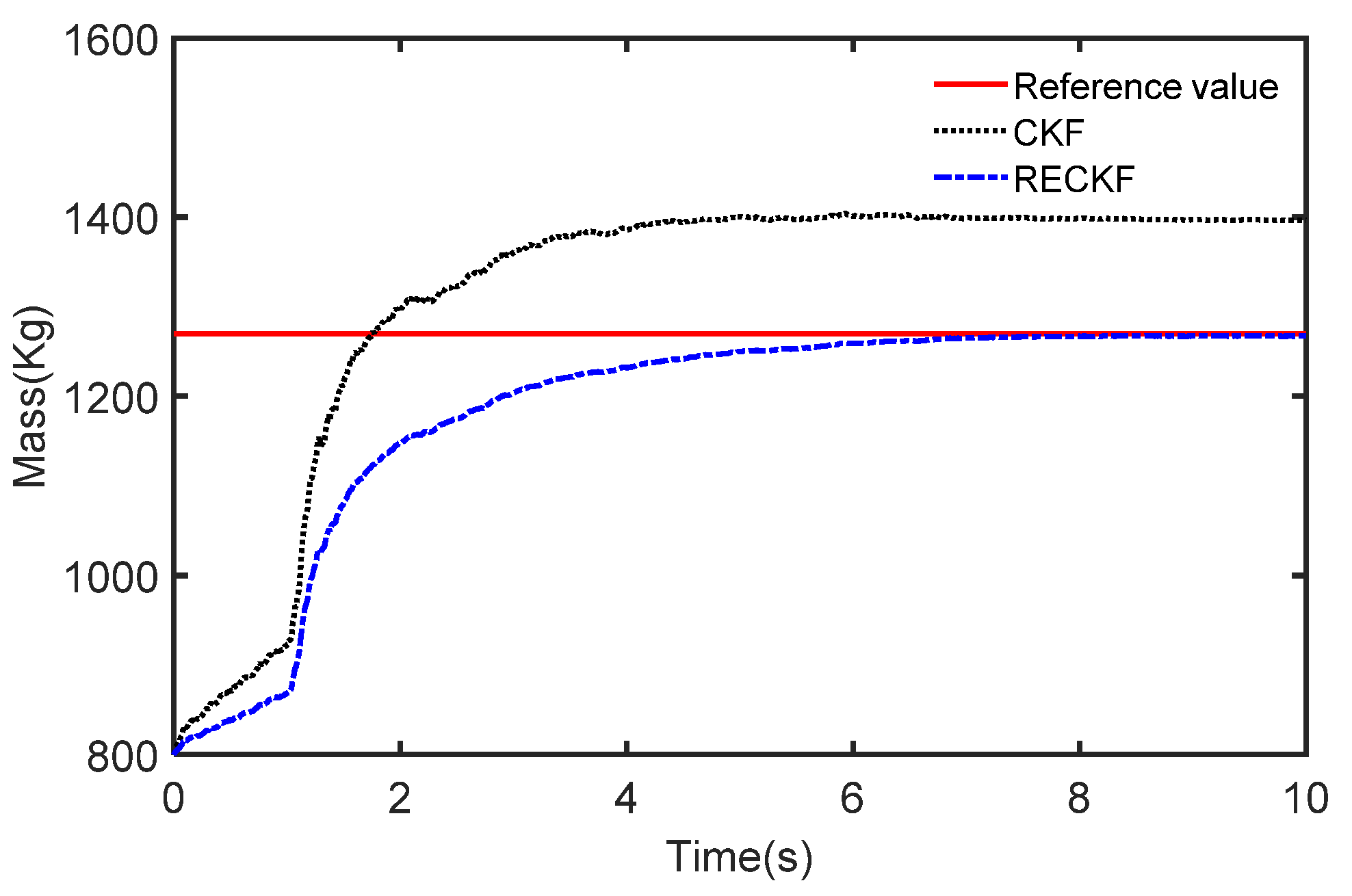
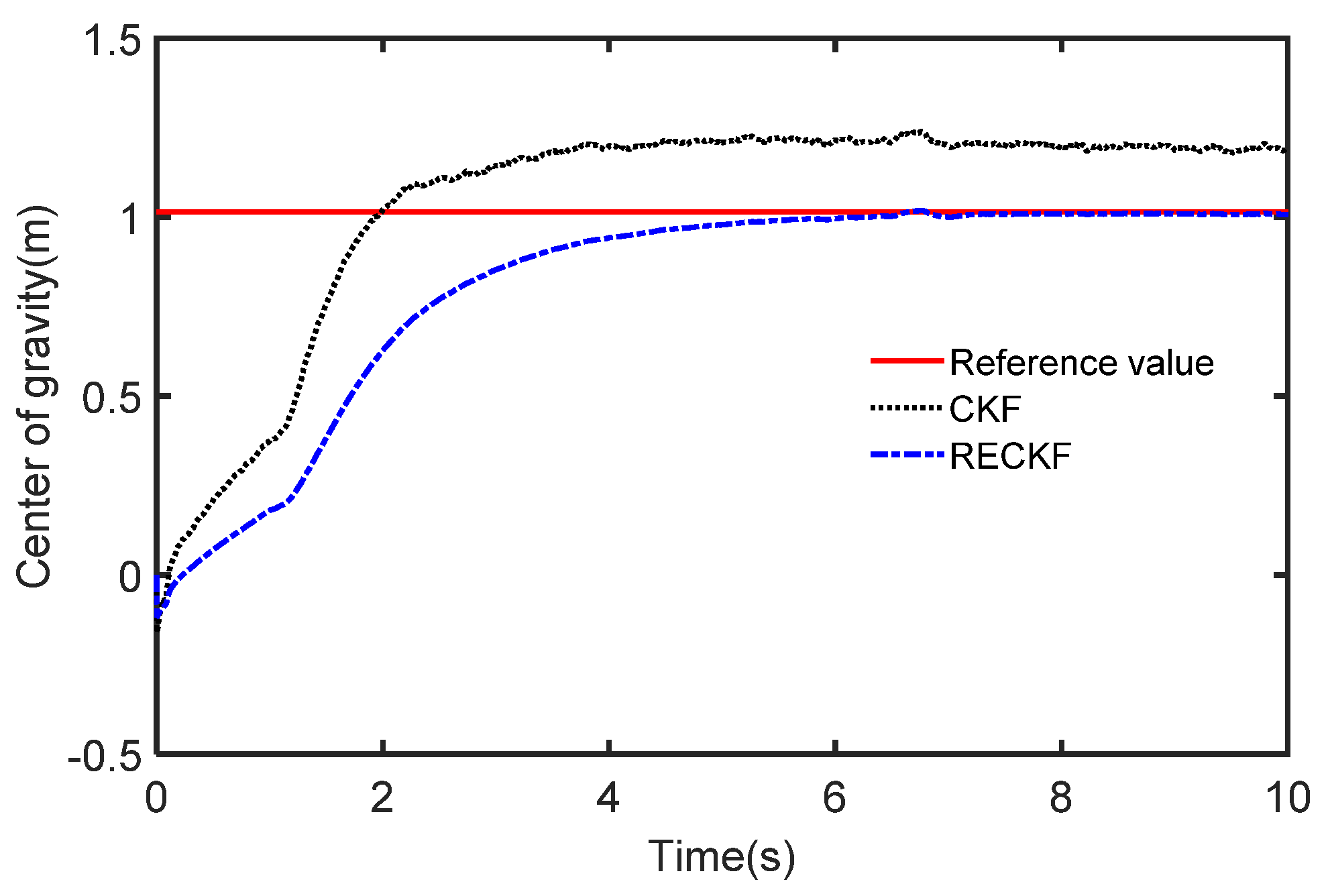
4.1. Acceleration Test
4.2. Deceleration Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Wang, Y.; Hu, J.; Wang, F.; Dong, H.; Yan, Y.; Ren, Y.; Zhou, C.; Yin, G. Tire Road Friction Coefficient Estimation: Review and Research Perspectives. Chin. J. Mech. Eng. 2022, 35, 1–11. [Google Scholar] [CrossRef]
- Zhou, H.; Jia, F.; Jing, H.; Liu, Z.; Güvenç, L. Coordinated Longitudinal and Lateral Motion Control for Four Wheel Independent Motor-Drive Electric Vehicle. IEEE Trans. Veh. Technol. 2018, 67, 3782–3790. [Google Scholar] [CrossRef]
- Wang, Y.; Yan, Y.; Shen, T.; Bai, S.; Hu, J.; Xu, L.; Yin, G. An Event-Triggered Scheme for State Estimation of Preceding Vehicles under Connected Vehicle Environment. IEEE Trans. Intell. Veh. 2022, 1–10. [Google Scholar] [CrossRef]
- Wang, C.; Wang, Z.; Zhang, L.; Cao, D.; Dorrell, D.G. A vehicle rollover evaluation system based on enabling state and parameter estimation. IEEE Trans. Ind. Inform. 2020, 17, 4003–4013. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, W. A Safety Reinforced Cooperative Adaptive Cruise Control Strategy Accounting for Dynamic Vehicle-to-Vehicle Communication Failure. Sensors 2021, 21, 6158. [Google Scholar] [CrossRef]
- Wang, Y.; Yin, G.; Li, Y.; Ullah, S.; Zhuang, W.; Wang, J.; Zhang, N.; Geng, K. Self-learning control for coordinated collision avoidance of automated vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 1149–1163. [Google Scholar] [CrossRef]
- Jeong, D.; Kim, S.; Lee, J.; Choi, S.B.; Kim, M.; Lee, H. Estimation of tire load and vehicle parameters using intelligent tires combined with vehicle dynamics. IEEE Trans. Instrum. Meas. 2020, 70, 1–12. [Google Scholar] [CrossRef]
- Deng, Z.; Chu, D.; Tian, F.; He, Y.; Wu, C.; Hu, Z.; Pei, X. Online estimation for vehicle center of gravity height based on unscented Kalman filter. In Proceedings of the 2017 4th International Conference on Transportation Information and Safety (ICTIS), Banff, AB, Canada, 8–10 August 2017; pp. 33–36. [Google Scholar]
- Zhang, Y.; Zhang, Y.; Ai, Z.; Feng, Y.; Zhang, J.; Murphey, Y. Estimation of electric mining haul trucks’ mass and road slope using dual level reinforcement estimator. IEEE Trans. Veh. Technol. 2019, 68, 10627–10638. [Google Scholar] [CrossRef]
- Kim, I.; Kim, H.; Bang, J.; Huh, K. Development of estimation algorithms for vehicle’s mass and road grade. Int. J. Automot. Technol. 2013, 14, 889–895. [Google Scholar] [CrossRef]
- Chu, W.; Luo, Y.; Luo, J.; Li, K. Vehicle mass and road slope estimates for electric vehicles. J. Tsinghua Univ. 2014, 54, 724–728. [Google Scholar]
- Wang, Y.; Geng, K.; Xu, L.; Ren, Y.; Dong, H.; Yin, G. Estimation of Sideslip Angle and Tire Cornering Stiffness Using Fuzzy Adaptive Robust Cubature Kalman Filter. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 1451–1462. [Google Scholar] [CrossRef]
- Lingman, P.; Schmidtbauer, B. Road slope and vehicle mass estimation using Kalman filtering. Veh. Syst. Dyn. 2002, 37, 12–23. [Google Scholar] [CrossRef]
- Eriksson, A. Implementation and Evaluation of a Mass Estimation Algorithm; KTH: Stockholm, Sweden, 2009. [Google Scholar]
- Winstead, V.; Kolmanovsky, I.V. Estimation of road grade and vehicle mass via model predictive control. In Proceedings of the IEEE Conference on Control Applications, Toronto, ON, Canada, 28–31 August 2005; IEEE: New York, NY, USA, 2005; pp. 1588–1593. [Google Scholar]
- Altmannshofer, S.; Endisch, C. Robust vehicle mass and driving resistance estimation. In Proceedings of the American control conference (ACC), Boston, MA, USA, 6–8 July 2016; IEEE: New York, NY, USA, 2016; pp. 6869–6874. [Google Scholar]
- Cai, L.; Wang, H.; Jia, T.; Peng, P.; Pi, D.; Wang, E. Two-layer structure algorithm for estimation of commercial vehicle mass. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 378–389. [Google Scholar] [CrossRef]
- Lei, Y.; Fu, Y.; Liu, K.; Zeng, H.; Zhang, Y. Vehicle mass and road grade estimation based on extended Kalman filter. Trans. Chin. Soc. Agric. Mach 2014, 45, 9–13. [Google Scholar]
- Torabi, S.; Wahde, M.; Hartono, P. Road grade and vehicle mass estimation for heavy-duty vehicles using feedforward neural networks. In Proceedings of the 4th International Conference on Intelligent Transportation Engineering (ICITE), Singapore, 6–8 September 2019; pp. 316–321. [Google Scholar]
- Korayem, A.; Khajepour, A.; Fidan, B. Trailer mass estimation using system model-based and machine learning approaches. IEEE Trans. Veh. Technol. 2020, 69, 12536–12546. [Google Scholar] [CrossRef]
- Wesemeier, D.; Isermann, R. Identification of vehicle parameters using stationary driving maneuvers. Control. Eng. Pract. 2009, 17, 1426–1431. [Google Scholar] [CrossRef]
- Lee, J.; Hyun, D.; Han, K.; Choi, S. Real-time longitudinal location estimation of vehicle center of gravity. Int. J. Automot. Technol. 2018, 19, 651–658. [Google Scholar] [CrossRef]
- Zaheer, M.H.; Yoon, P. Estimation of mobile robot’s center of gravity for rollover detection. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 6–10 July 2020; IEEE: New York, NY, USA, 2020; pp. 1567–1572. [Google Scholar]
- Huang, X.; Wang, J. Real-time estimation of center of gravity position for lightweight vehicles using combined AKF–EKF method. IEEE Trans. Veh. Technol. 2014, 63, 4221–4231. [Google Scholar] [CrossRef]
- Cheng, S.; Li, L.; Chen, J. Fusion algorithm design based on adaptive SCKF and integral correction for sideslip angle observation. IEEE Trans. Ind. Electron. 2018, 65, 5754–5763. [Google Scholar] [CrossRef]
- Wang, J.; Alexander, L.; Rajamani, R. Friction estimation on high way vehicles using longitudinal measurements. J. Dyn. Syst. Meas. Control. 2004, 126, 265–275. [Google Scholar] [CrossRef]
- Mu, J.; Tian, F.; Wang, C.; Gao, W.; Cheng, J. Robust Fractional Embedded Cubature Kalman Filter for Fractional Nonlinear Stochastic System. Int. J. Control. Autom. Syst. 2022, 20, 3549–3560. [Google Scholar] [CrossRef]
- Miller, W.; Lewis, J. Dynamic state estimation in power systems. IEEE Trans. Autom. Control. 1971, 16, 841–846. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| vehicle mass | |
| distance from the center of gravity to the front axle | |
| distance from the center of gravity to the rear axle | |
| longitudinal velocity | |
| driving moments of the rear wheels | |
| driving moments of the front wheels | |
| longitudinal forces at the front wheels | |
| longitudinal forces at the rear wheels | |
| vertical forces at the front wheels | |
| vertical forces at the rear wheels | |
| height of the CG | |
| wheel inertia | |
| rear wheel speeds | |
| front wheel speeds | |
| tire radius | |
| air drag influence coefficient | |
| air density | |
| windward area | |
| weight acceleration | |
| rolling resistance coefficient | |
| longitudinal acceleration |
| Symbol | Variables |
|---|---|
| measurement vector | |
| state transition function | |
| input vector | |
| process noise | |
| output function | |
| measurement noise |
| Symbol | Values |
|---|---|
| Symbol | CKF | RECKF |
|---|---|---|
| m | 111.20 | 76.76 |
| a | 0.3691 | 0.3586 |
| Symbol | CKF | RECKF |
|---|---|---|
| m | 242.33 | 224.44 |
| a | 0.5330 | 0.4663 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Yin, G.; Wu, Z. Joint Estimation of Mass and Center of Gravity Position for Distributed Drive Electric Vehicles Using Dual Robust Embedded Cubature Kalman Filter. Sensors 2022, 22, 10018. https://doi.org/10.3390/s222410018
Zhang Z, Yin G, Wu Z. Joint Estimation of Mass and Center of Gravity Position for Distributed Drive Electric Vehicles Using Dual Robust Embedded Cubature Kalman Filter. Sensors. 2022; 22(24):10018. https://doi.org/10.3390/s222410018
Chicago/Turabian StyleZhang, Zhiguo, Guodong Yin, and Zhixin Wu. 2022. "Joint Estimation of Mass and Center of Gravity Position for Distributed Drive Electric Vehicles Using Dual Robust Embedded Cubature Kalman Filter" Sensors 22, no. 24: 10018. https://doi.org/10.3390/s222410018
APA StyleZhang, Z., Yin, G., & Wu, Z. (2022). Joint Estimation of Mass and Center of Gravity Position for Distributed Drive Electric Vehicles Using Dual Robust Embedded Cubature Kalman Filter. Sensors, 22(24), 10018. https://doi.org/10.3390/s222410018