
GC-MLP: Graph Convolution MLP for Point Cloud Analysis

Abstract
1. Introduction
- (a)
- We propose a point cloud processing method based on adaptive weight graph convolution multilayer perceptron. The adaptive weight method greatly improves the flexibility of the algorithm by defining convolution filters at any relative position, and then calculating the aggregate weights on all adjacent points.
- (b)
- We propose a convolution multilayer perceptron, which improves the generalization performance through convolutional sparse links, and improves the model capacity through MLP’s dynamic weights and global receptive field. The experimental results show that our proposed algorithm achieves the state of the art on both classification and segmentation benchmark datasets.
2. Related Work
2.1. Projection-Based Networks
2.2. Voxel-Based Networks
2.3. Point-Based Networks
3. Methods
3.1. Overview
3.2. Adaptive Weight Graph Convolution Multilayer Perceptron
3.3. Convolution Multilayer Perceptron
4. Experimental Results and Analysis
4.1. Classification
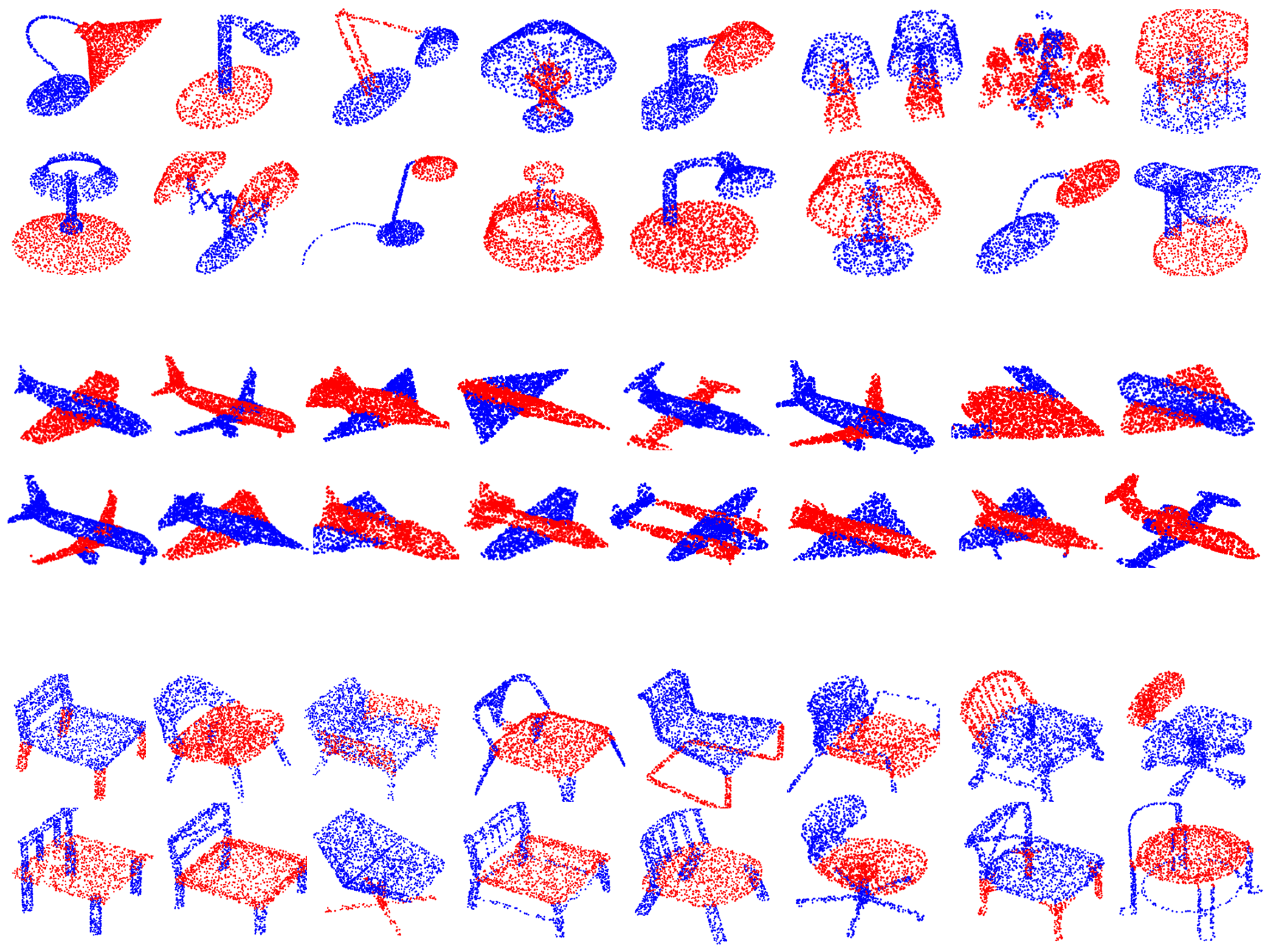
4.2. Part Segmentation
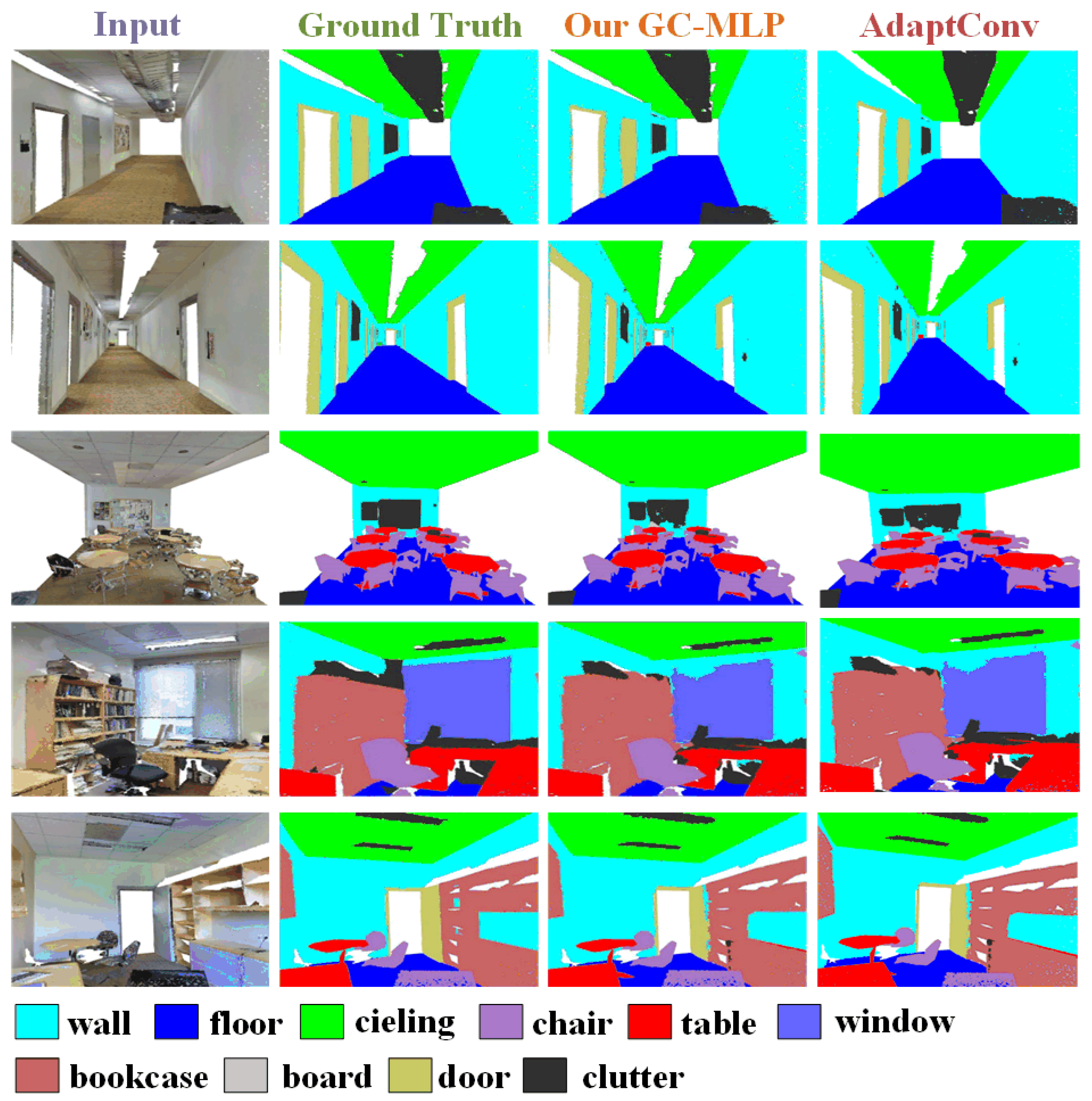
4.3. Indoor Scene Segmentation
4.4. Ablation Studies
4.5. Robustness Test
4.6. Efficiency
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Su, H.; Maji, S.; Kalogerakis, E.; Learned-Miller, E. Multi-view convolutional neural networks for 3d shape recognition. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 945–953. [Google Scholar]
- Kanezaki, A.; Matsushita, Y.; Nishida, Y. Rotationnet: Joint object categorization and pose estimation using multiviews from unsupervised viewpoints. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 5010–5019. [Google Scholar]
- Ben-Shabat, Y.; Lindenbaum, M.; Fischer, A. 3dmfv: Three-dimensional point cloud classification in real-time using convolutional neural networks. IEEE Robot. Autom. Lett. 2018, 3, 3145–3152. [Google Scholar] [CrossRef]
- Meng, H.Y.; Gao, L.; Lai, Y.K.; Manocha, D. Vv-net: Voxel vae net with group convolutions for point cloud segmentation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27–28 October 2019; pp. 8500–8508. [Google Scholar]
- Maturana, D.; Scherer, S. Voxnet: A 3d convolutional neural network for real-time object recognition. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 922–928. [Google Scholar]
- Hu, Q.; Yang, B.; Xie, L.; Rosa, S.; Guo, Y.; Wang, Z.; Trigoni, N.; Markham, A. Randla-net: Efficient semantic segmentation of large-scale point clouds. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 11108–11117. [Google Scholar]
- Huang, Q.; Wang, W.; Neumann, U. Recurrent slice networks for 3d segmentation of point clouds. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2626–2635. [Google Scholar]
- Jiang, L.; Zhao, H.; Liu, S.; Shen, X.; Fu, C.W.; Jia, J. Hierarchical point-edge interaction network for point cloud semantic segmentation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27–28 October 2019; pp. 10433–10441. [Google Scholar]
- Thomas, H.; Qi, C.R.; Deschaud, J.E.; Marcotegui, B.; Goulette, F.; Guibas, L.J. Kpconv: Flexible and deformable convolution for point clouds. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27–28 October 2019; pp. 6411–6420. [Google Scholar]
- Qiu, S.; Anwar, S.; Barnes, N. Dense-resolution network for point cloud classification and segmentation. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 3–8 January 2021; pp. 3813–3822. [Google Scholar]
- Wang, L.; Huang, Y.; Hou, Y.; Zhang, S.; Shan, J. Graph attention convolution for point cloud semantic segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 10296–10305. [Google Scholar]
- Wang, Y.; Sun, Y.; Liu, Z.; Sarma, S.E.; Bronstein, M.M.; Solomon, J.M. Dynamic graph cnn for learning on point clouds. ACM Trans. Graph. (Tog) 2019, 38, 1–12. [Google Scholar] [CrossRef]
- Lin, Z.H.; Huang, S.Y.; Wang, Y.C.F. Convolution in the cloud: Learning deformable kernels in 3d graph convolution networks for point cloud analysis. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 1800–1809. [Google Scholar]
- Yu, T.; Meng, J.; Yuan, J. Multi-view harmonized bilinear network for 3d object recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 186–194. [Google Scholar]
- Tatarchenko, M.; Park, J.; Koltun, V.; Zhou, Q.Y. Tangent convolutions for dense prediction in 3d. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 3887–3896. [Google Scholar]
- Lin, Y.; Yan, Z.; Huang, H.; Du, D.; Liu, L.; Cui, S.; Han, X. Fpconv: Learning local flattening for point convolution. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 4293–4302. [Google Scholar]
- Lang, A.H.; Vora, S.; Caesar, H.; Zhou, L.; Yang, J.; Beijbom, O. Pointpillars: Fast encoders for object detection from point clouds. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 12697–12705. [Google Scholar]
- Li, H.T.; Todd, Z.; Bielski, N.; Carroll, F. 3d lidar point-cloud projection operator and transfer machine learning for effective road surface features detection and segmentation. Vis. Comput. 2022, 38, 1759–1774. [Google Scholar] [CrossRef]
- Le, T.; Duan, Y. Pointgrid: A deep network for 3d shape understanding. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 9204–9214. [Google Scholar]
- Choy, C.; Gwak, J.; Savarese, S. 4d spatio-temporal convnets: Minkowski convolutional neural networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3075–3084. [Google Scholar]
- Riegler, G.; Osman Ulusoy, A.; Geiger, A. Octnet: Learning deep 3d representations at high resolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 3577–3586. [Google Scholar]
- Klokov, R.; Lempitsky, V. Escape from cells: Deep kd-networks for the recognition of 3d point cloud models. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 863–872. [Google Scholar]
- Park, C.; Jeong, Y.; Cho, M.; Park, J. Fast point transformer. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–24 June 2022; pp. 16949–16958. [Google Scholar]
- Yang, J.; Zhang, Q.; Ni, B.; Li, L.; Liu, J.; Zhou, M.; Tian, Q. Modeling point clouds with self-attention and gumbel subset sampling. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3323–3332. [Google Scholar]
- Zhao, H.; Jiang, L.; Fu, C.W.; Jia, J. Pointweb: Enhancing local neighborhood features for point cloud processing. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 5565–5573. [Google Scholar]
- Sheikh, M.; Asghar, M.A.; Bibi, R.; Malik, M.N.; Shorfuzzaman, M.; Mehmood, R.M.; Kim, S.H. DFT-Net: Deep feature transformation based network for object categorization and part segmentation in 3-dimensional point clouds. Sensors 2022, 22, 2512. [Google Scholar] [CrossRef] [PubMed]
- Han, X.F.; Jin, Y.F.; Cheng, H.X.; Xiao, G.Q. Dual transformer for point cloud analysis. IEEE Trans. Multimed. 2022, 1–10. [Google Scholar] [CrossRef]
- Yan, X.; Zheng, C.; Li, Z.; Wang, S.; Cui, S. Pointasnl: Robust point clouds processing using nonlocal neural networks with adaptive sampling. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 5589–5598. [Google Scholar]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. Pointnet: Deep learning on point sets for 3d classification and segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 652–660. [Google Scholar]
- Li, J.; Chen, B.M.; Lee, G.H. So-net: Self-organizing network for point cloud analysis. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 9397–9406. [Google Scholar]
- Xu, M.; Zhang, J.; Zhou, Z.; Xu, M.; Qi, X.; Qiao, Y. Learning geometry-disentangled representation for complementary understanding of 3d object point cloud. In Proceedings of the AAAI Conference on Artificial Intelligence, Vancouver, BC, USA, 2–9 February 2021; Volume 35, pp. 3056–3064. [Google Scholar]
- Xu, M.; Zhou, Z.; Qiao, Y. Geometry sharing network for 3d point cloud classification and segmentation. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 12500–12507. [Google Scholar]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. Adv. Neural Inf. Process. Syst. 2017, 30, 5105–5114. [Google Scholar]
- Wang, G.; Zhai, Q.; Liu, H. Cross self-attention network for 3d point cloud. Knowl. Based Syst. 2022, 247, 108769. [Google Scholar] [CrossRef]
- Li, Y.; Bu, R.; Sun, M.; Wu, W.; Di, X.; Chen, B. Pointcnn: Convolution on x-transformed points. Adv. Neural Inf. Process. Syst. 2018, 31. Available online: https://proceedings.neurips.cc/paper/2018/hash/f5f8590cd58a54e94377e6ae2eded4d9-Abstract.html (accessed on 24 October 2022).
- Xu, Y.; Fan, T.; Xu, M.; Zeng, L.; Qiao, Y. Spidercnn: Deep learning on point sets with parameterized convolutional filters. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 87–102. [Google Scholar]
- Liu, Y.; Fan, B.; Xiang, S.; Pan, C. Relation-shape convolutional neural network for point cloud analysis. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 8895–8904. [Google Scholar]
- Zhang, Z.; Hua, B.S.; Yeung, S.K. Shellnet: Efficient point cloud convolutional neural networks using concentric shells statistics. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27–28 October 2019; pp. 1607–1616. [Google Scholar]
- Qiu, S.; Anwar, S.; Barnes, N. Geometric back-projection network for point cloud classification. IEEE Trans. Multimed. 2021, 24, 1943–1955. [Google Scholar] [CrossRef]
- Lei, H.; Akhtar, N.; Mian, A. Spherical kernel for efficient graph convolution on 3d point clouds. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 43, 3664–3680. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Chen, H.; Cui, Z.; Timofte, R.; Pollefeys, M.; Chirikjian, G.S.; Van Gool, L. Towards efficient graph convolutional networks for point cloud handling. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 11–18 October 2021; pp. 3752–3762. [Google Scholar]
- Zhou, H.; Feng, Y.; Fang, M.; Wei, M.; Qin, J.; Lu, T. Adaptive graph convolution for point cloud analysis. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 11–18 October 2021; pp. 4965–4974. [Google Scholar]
- Simonovsky, M.; Komodakis, N. Dynamic edge-conditioned filters in convolutional neural networks on graphs. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 3693–3702. [Google Scholar]
- Landrieu, L.; Simonovsky, M. Large-scale point cloud semantic segmentation with superpoint graphs. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4558–4567. [Google Scholar]
- Landrieu, L.; Boussaha, M. Point cloud oversegmentation with graph-structured deep metric learning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 7440–7449. [Google Scholar]
- Yang, F.; Davoine, F.; Wang, H.; Jin, Z. Continuous conditional random field convolution for point cloud segmentation. Pattern Recognit. 2022, 122, 108357. [Google Scholar] [CrossRef]
- Wu, Z.; Song, S.; Khosla, A.; Yu, F.; Zhang, L.; Tang, X.; Xiao, J. 3d shapenets: A deep representation for volumetric shapes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1912–1920. [Google Scholar]
- Yi, L.; Kim, V.G.; Ceylan, D.; Shen, I.C.; Yan, M.; Su, H.; Lu, C.; Huang, Q.; Sheffer, A.; Guibas, L. A scalable active framework for region annotation in 3d shape collections. ACM Trans. Graph. (ToG) 2016, 35, 1–12. [Google Scholar] [CrossRef]
- Armeni, I.; Sener, O.; Zamir, A.R.; Jiang, H.; Brilakis, I.; Fischer, M.; Savarese, S. 3D semantic parsing of large-scale indoor spaces. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 1534–1543. [Google Scholar]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. Pytorch: An imperative style, high-performance deep learning library. Adv. Neural Inf. Process. Syst. 2019, 32. Available online: https://proceedings.neurips.cc/paper/2019/hash/bdbca288fee7f92f2bfa9f7012727740-Abstract.html (accessed on 24 October 2022).
- Qi, C.R.; Su, H.; Nießner, M.; Dai, A.; Yan, M.; Guibas, L.J. Volumetric and multi-view cnns for object classification on 3d data. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 5648–5656. [Google Scholar]
- Wang, C.; Samari, B.; Siddiqi, K. Local spectral graph convolution for point set feature learning. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 52–66. [Google Scholar]
- Li, Y.; Lin, Q.; Zhang, Z.; Zhang, L.; Chen, D.; Shuang, F. MFNet: Multi-level feature extraction and fusion network for large-scale point cloud classification. Remote. Sens. 2022, 14, 5707. [Google Scholar] [CrossRef]
- Tchapmi, L.; Choy, C.; Armeni, I.; Gwak, J.; Savarese, S. Segcloud: Semantic segmentation of 3d point clouds. In Proceedings of the 2017 International Conference on 3D Vision (3DV), Qingdao, China, 10–12 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 537–547. [Google Scholar]
- Wang, S.; Suo, S.; Ma, W.C.; Pokrovsky, A.; Urtasun, R. Deep parametric continuous convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2589–2597. [Google Scholar]
- Liu, Z.; Hu, H.; Cao, Y.; Zhang, Z.; Tong, X. A closer look at local aggregation operators in point cloud analysis. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 326–342. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Input | Points | mAcc (%) | OA (%) |
|---|---|---|---|---|
| 3DShapeNetParts [47] | voxel | - | 77.3 | 84.7 |
| VoxNet [5] | voxel | - | 83.0 | 85.9 |
| Subvolume [51] | voxel | - | 86.0 | 89.2 |
| PointNet [29] | xyz | 1k | 86.0 | 89.2 |
| PointNet++ [33] | xyz, normel | 5k | - | 91.9 |
| Kd-Net [22] | xyz | 1k | - | 90.6 |
| SpecGCN [52] | xyz | 1k | - | 92.1 |
| SpiderCNN [36] | xyz, normel | 5k | - | 92.4 |
| PointCNN [35] | xyz | 1k | 88.1 | 92.2 |
| SO-Net [30] | xyz, normel | 5k | - | 93.4 |
| DGCNN [12] | xyz | 1k | 90.2 | 92.9 |
| KPConv [9] | xyz | 1k | - | 92.9 |
| 3D-GCN [13] | xyz | 1k | - | 92.1 |
| PointASNL [28] | xyz, normel | 6.8k | - | 93.2 |
| AdaptConv [42] | xyz | 1k | 90.7 | 93.4 |
| DRNet [10] | xyz | 1k | - | 93.1 |
| CSANet [34] | xyz | 1k | 89.9 | 92.8 |
| MFNet [53] | xyz | 1k | 91.4 | 93.1 |
| ours | xyz | 1k | 91.0 | 93.4 |
| Method | mcIoU | mIoU | Air Plane | Bag | Cap | Car | Chair | Ear Phone | Guitar | Knife | Lamp | Laptop | Motor | Mug | Pistol | Rocket | State | Table |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| KdNet [22] | 77.4 | 82.3 | 80.1 | 74.6 | 74.3 | 70.3 | 88.6 | 73.5 | 90.2 | 87.2 | 81 | 94.9 | 87.4 | 86.7 | 78.1 | 51.8 | 69.3 | 80.3 |
| PointNet [29] | 80.4 | 83.7 | 83.4 | 78.7 | 82.5 | 74.9 | 89.6 | 73 | 91.5 | 85.9 | 80.8 | 95.3 | 65.2 | 93 | 81.2 | 57.9 | 72.8 | 80.6 |
| PointNet++ [33] | 81.9 | 85.1 | 82.4 | 79 | 87.7 | 77.3 | 90.8 | 71.8 | 91 | 85.9 | 83.7 | 95.3 | 71.6 | 94.1 | 81.3 | 58.7 | 76.4 | 82.6 |
| SO-Net [30] | 81 | 84.9 | 82.8 | 77.8 | 88 | 77.3 | 90.6 | 73.5 | 90.7 | 83.9 | 82.8 | 94.8 | 69.1 | 94.2 | 80.9 | 53.1 | 72.9 | 83 |
| DGCNN [12] | 82.3 | 85.2 | 84 | 83.4 | 86.7 | 77.8 | 90.6 | 74.7 | 91.2 | 87.5 | 82.8 | 95.7 | 66.3 | 94.9 | 81.1 | 63.5 | 74.5 | 82.6 |
| PointCNN [35] | - | 86.1 | 84.1 | 86.4 | 86 | 80.8 | 90.6 | 79.7 | 92.3 | 88.4 | 85.3 | 96.1 | 77.2 | 95.3 | 84.2 | 64.2 | 80 | 83 |
| PointASNL [28] | - | 86.1 | 84.1 | 84.7 | 87.9 | 79.7 | 92.2 | 73.7 | 91 | 87.2 | 84.2 | 95.8 | 74.4 | 95.2 | 81 | 63 | 76.3 | 83.2 |
| 3DGCN [13] | 82.1 | 85.1 | 83.1 | 84 | 86.6 | 77.5 | 90.3 | 74.1 | 90.9 | 86.4 | 83.8 | 95.6 | 66.8 | 94.8 | 81.3 | 59.6 | 75.7 | 82.8 |
| AdaptConv [42] | 83.4 | 86.4 | 84.8 | 81.2 | 85.7 | 79.7 | 91.2 | 80.9 | 91.9 | 88.6 | 84.8 | 96.2 | 70.7 | 94.9 | 82.3 | 61 | 75.9 | 84.2 |
| CRFConv [46] | 83.5 | 85.5 | 83.9 | 84.8 | 83.0 | 80.2 | 91.8 | 77.9 | 91.8 | 86.9 | 84.9 | 95.6 | 77.8 | 95.6 | 82.0 | 64.4 | 75.3 | 80.8 |
| ours | 83.6 | 86.1 | 84.8 | 84.8 | 86.2 | 79.5 | 91.4 | 78.7 | 91.2 | 87.8 | 85.5 | 96.1 | 73.6 | 94.8 | 83.4 | 60.8 | 77.3 | 83 |
| Method | mIoU | Ceiling | Floor | Wall | Beam | Column | Window | Door | Table | Chair | Sofa | Book-Case | Board | Clutter |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PointNet [29] | 41.1 | 88.8 | 97.3 | 69.8 | 0.1 | 3.9 | 46.3 | 10.8 | 59 | 52.6 | 5.9 | 40.3 | 26.4 | 33.2 |
| SegCloud [54] | 48.9 | 90.1 | 96.1 | 69.9 | 0 | 18.4 | 38.4 | 23.1 | 70.4 | 75.9 | 40.9 | 58.4 | 13 | 41.6 |
| PointCNN [35] | 57.3 | 92.3 | 98.2 | 79.4 | 0 | 17.6 | 22.8 | 62.1 | 74.4 | 80.6 | 31.7 | 66.7 | 62.1 | 56.7 |
| PCCN [55] | 58.3 | 92.3 | 96.2 | 75.9 | 0.3 | 6 | 69.5 | 63.5 | 66.9 | 65.6 | 47.3 | 68.9 | 59.1 | 46.2 |
| PointWeb [25] | 60.3 | 92 | 98.5 | 79.4 | 0 | 21.1 | 59.7 | 64.8 | 76.3 | 88.3 | 46.9 | 69.3 | 64.9 | 52.5 |
| HPEIN [8] | 61.9 | 91.5 | 98.2 | 81.4 | 0 | 23.3 | 65.3 | 40 | 75.5 | 87.7 | 58.5 | 67.8 | 65.6 | 49.4 |
| GAC [11] | 62.8 | 92.2 | 98.2 | 81.9 | 0 | 20.3 | 59 | 40.8 | 78.5 | 85.8 | 61.7 | 70.7 | 74.6 | 52.8 |
| PointASNL [28] | 62.6 | 94.3 | 98.4 | 79.1 | 0 | 26.7 | 55.2 | 66.2 | 83.3 | 86.8 | 47.6 | 68.3 | 56.4 | 52.1 |
| AdaptConv [42] | 67.9 | 93.9 | 98.4 | 82.2 | 0 | 23.9 | 59.1 | 71.3 | 91.5 | 81.2 | 75.5 | 74.9 | 72.1 | 58.6 |
| CRFConv [46] | 66.2 | 93.3 | 96.3 | 82.2 | 0 | 23.7 | 60.3 | 68.2 | 82.4 | 86.0 | 63.4 | 73.8 | 72.4 | 58.9 |
| ours | 67.2 | 95.2 | 98.5 | 82.7 | 0 | 20.4 | 58.7 | 70 | 91.2 | 81.7 | 76.5 | 66.8 | 68.8 | 62.2 |
| GraphConv | AWConvMLP | ConvMLP | GC-MLP | mAcc (%) | OA (%) | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| First Two Layers | Last Two Layers | |||||||||
| Non | MLP | ResMLP | Non | MLP | ResMLP | |||||
| √ | 89.9 | 92.8 | ||||||||
| √ | 89.6 | 92.6 | ||||||||
| √ | 90.0 | 92.9 | ||||||||
| √ | √ | 90.2 | 92.8 | |||||||
| √ | √ | 91.0 | 93.4 | |||||||
| √ | √ | 90.3 | 93.2 | |||||||
| √ | √ | 90.4 | 93.2 | |||||||
| K | mAcc (%) | OA (%) |
|---|---|---|
| 5 | 88.1 | 92.2 |
| 10 | 90.4 | 93.0 |
| 20 | 91.0 | 93.4 |
| 40 | 90.7 | 93.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Geng, G.; Zhou, P.; Zhang, Q.; Li, Z.; Feng, R. GC-MLP: Graph Convolution MLP for Point Cloud Analysis. Sensors 2022, 22, 9488. https://doi.org/10.3390/s22239488
Wang Y, Geng G, Zhou P, Zhang Q, Li Z, Feng R. GC-MLP: Graph Convolution MLP for Point Cloud Analysis. Sensors. 2022; 22(23):9488. https://doi.org/10.3390/s22239488
Chicago/Turabian StyleWang, Yong, Guohua Geng, Pengbo Zhou, Qi Zhang, Zhan Li, and Ruihang Feng. 2022. "GC-MLP: Graph Convolution MLP for Point Cloud Analysis" Sensors 22, no. 23: 9488. https://doi.org/10.3390/s22239488
APA StyleWang, Y., Geng, G., Zhou, P., Zhang, Q., Li, Z., & Feng, R. (2022). GC-MLP: Graph Convolution MLP for Point Cloud Analysis. Sensors, 22(23), 9488. https://doi.org/10.3390/s22239488