
Fall Detection for Shipboard Seafarers Based on Optimized BlazePose and LSTM


 ,
,
Abstract
:1. Introduction
2. Related Works
3. Fall Detection Algorithm for Shipboard Seafarers Based on BlazePose and LSTM
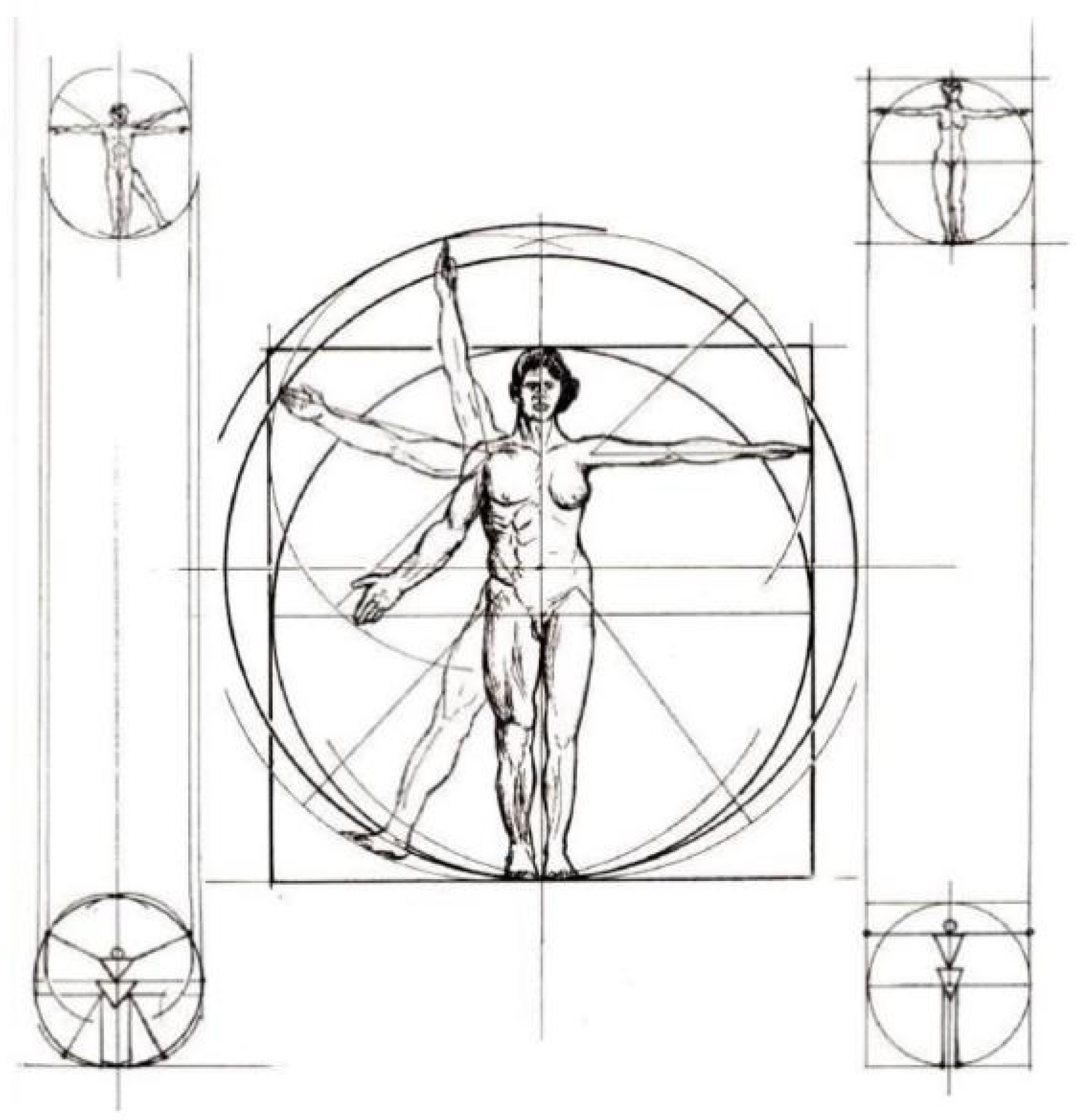
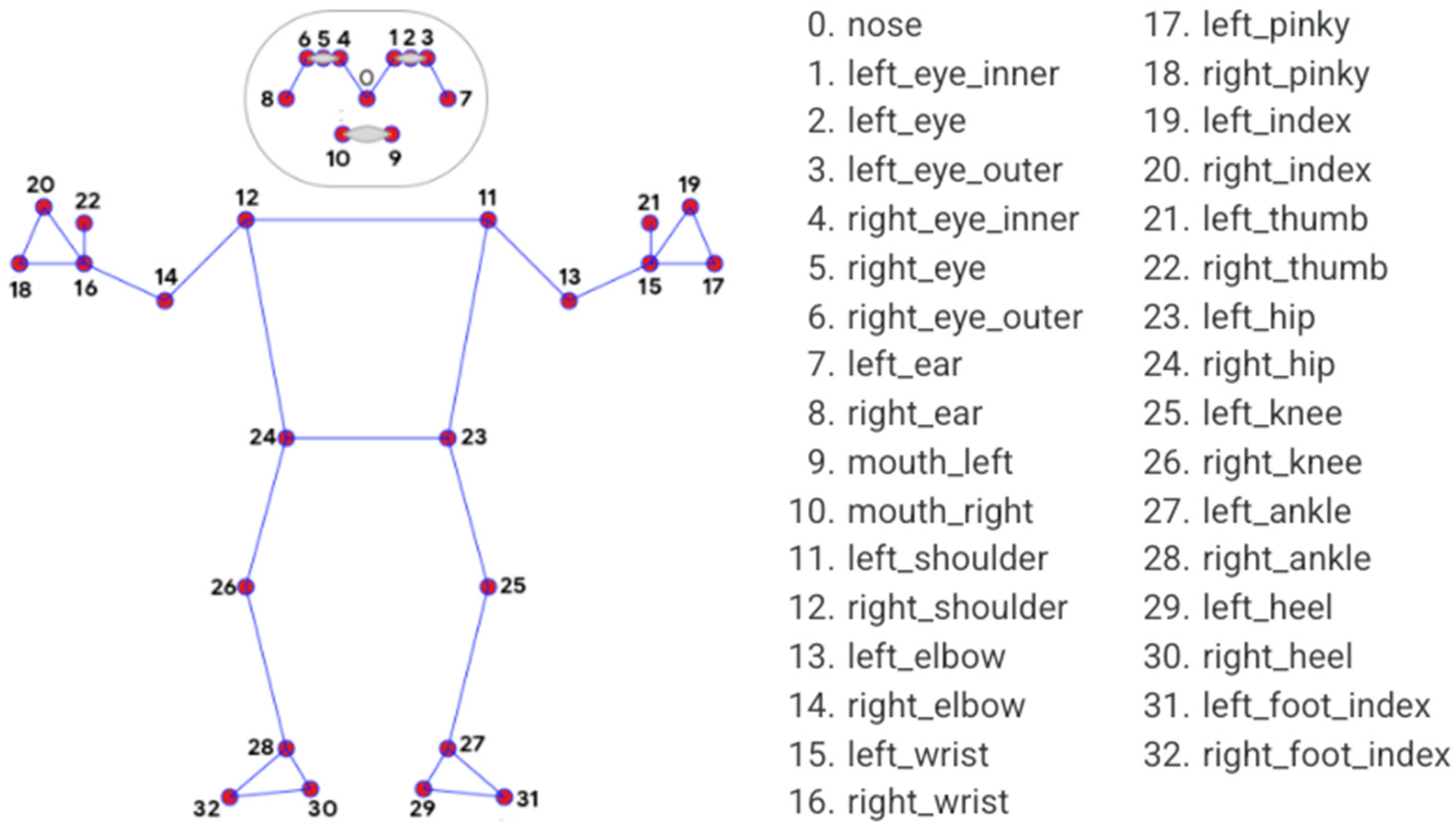
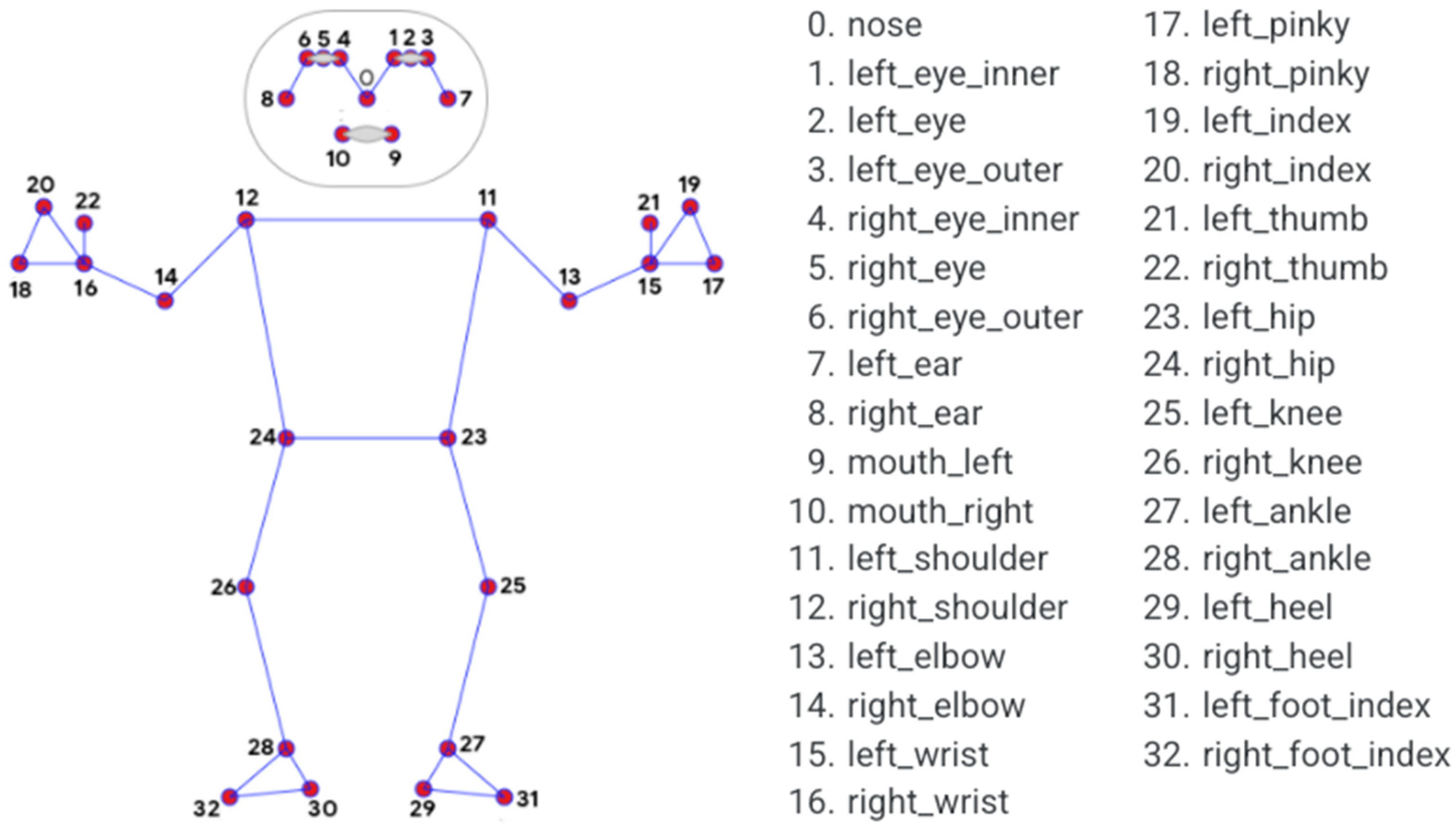
3.1. Human Body Key Point Extraction Network Based on BlazePose
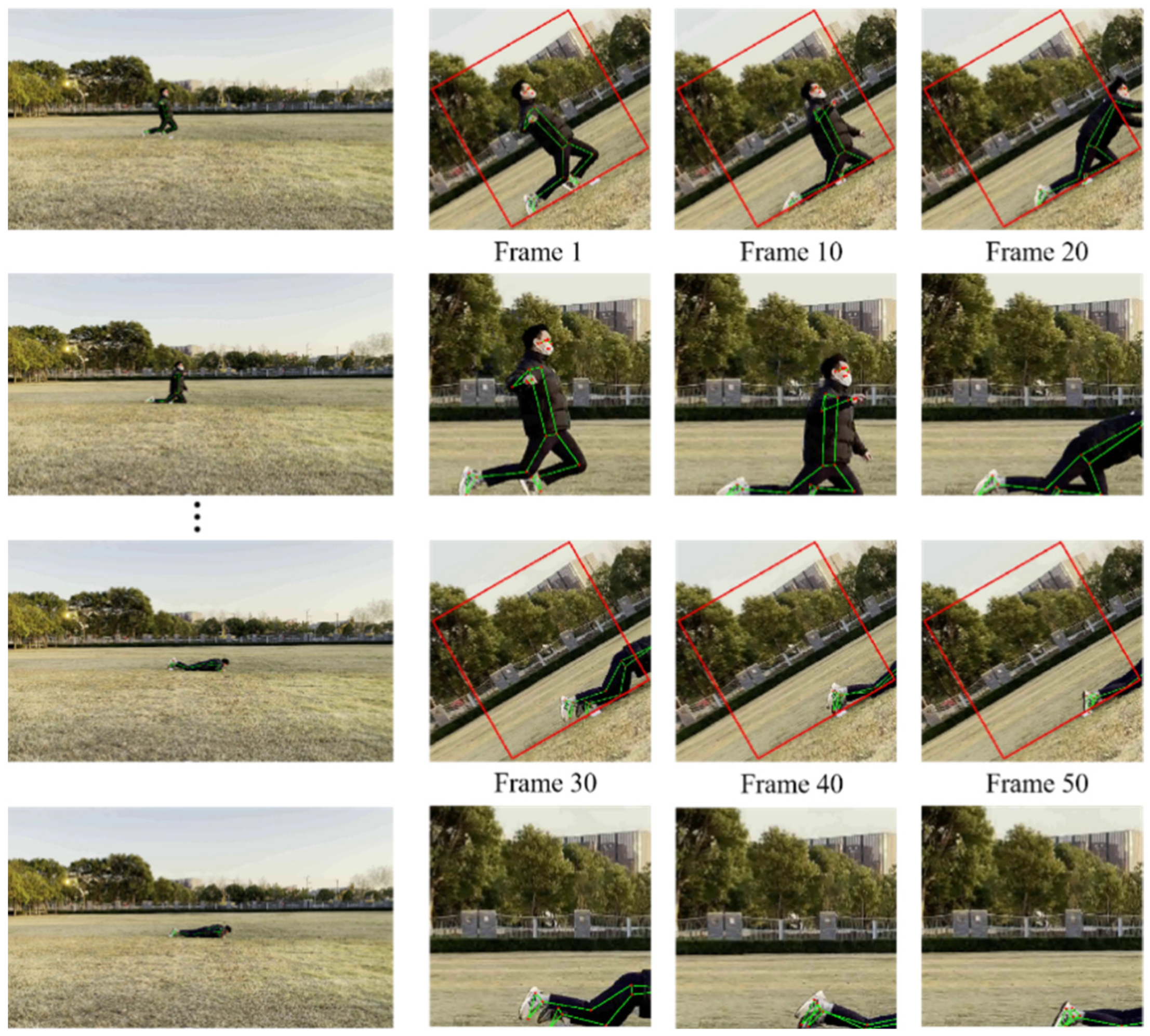
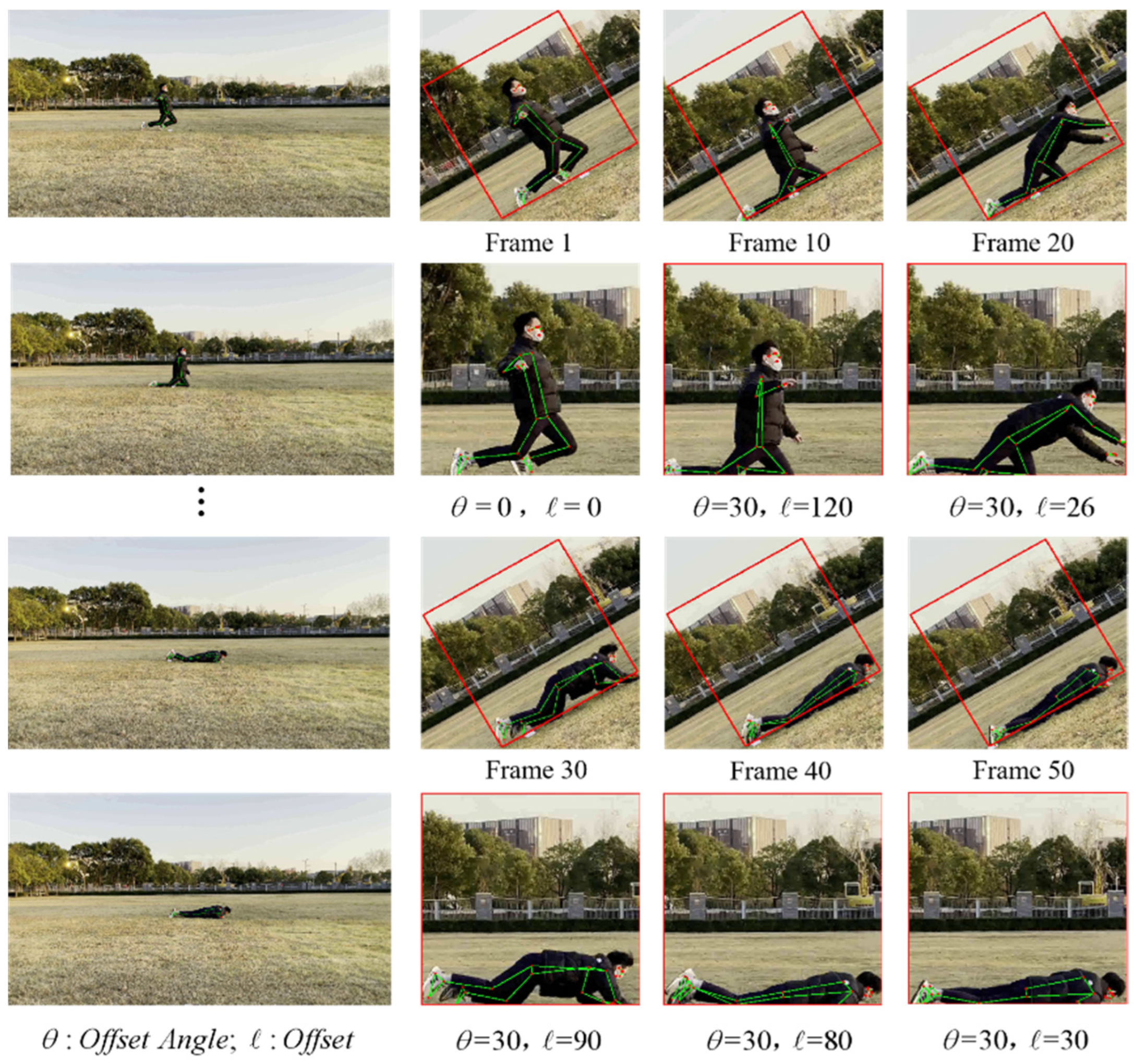
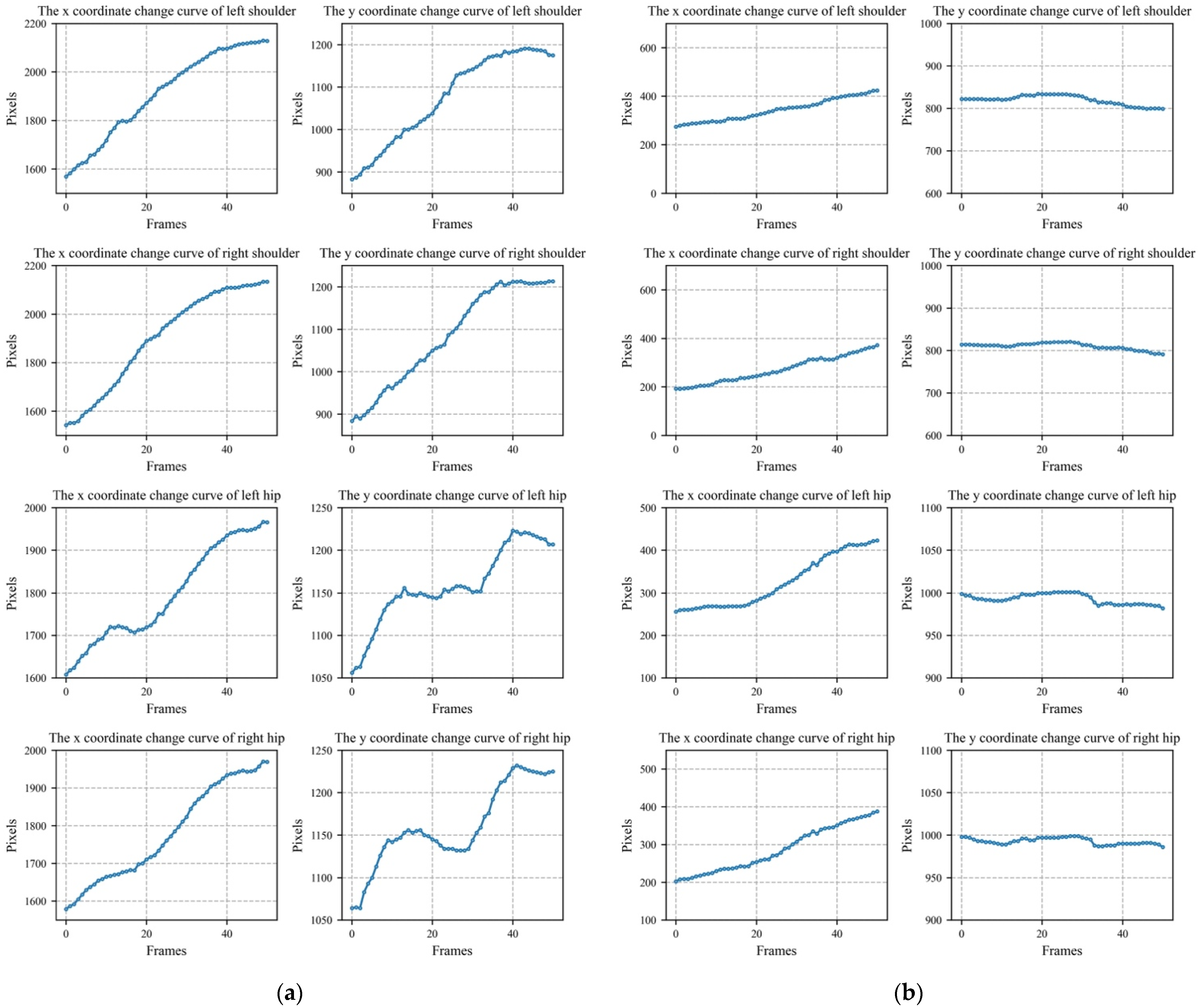
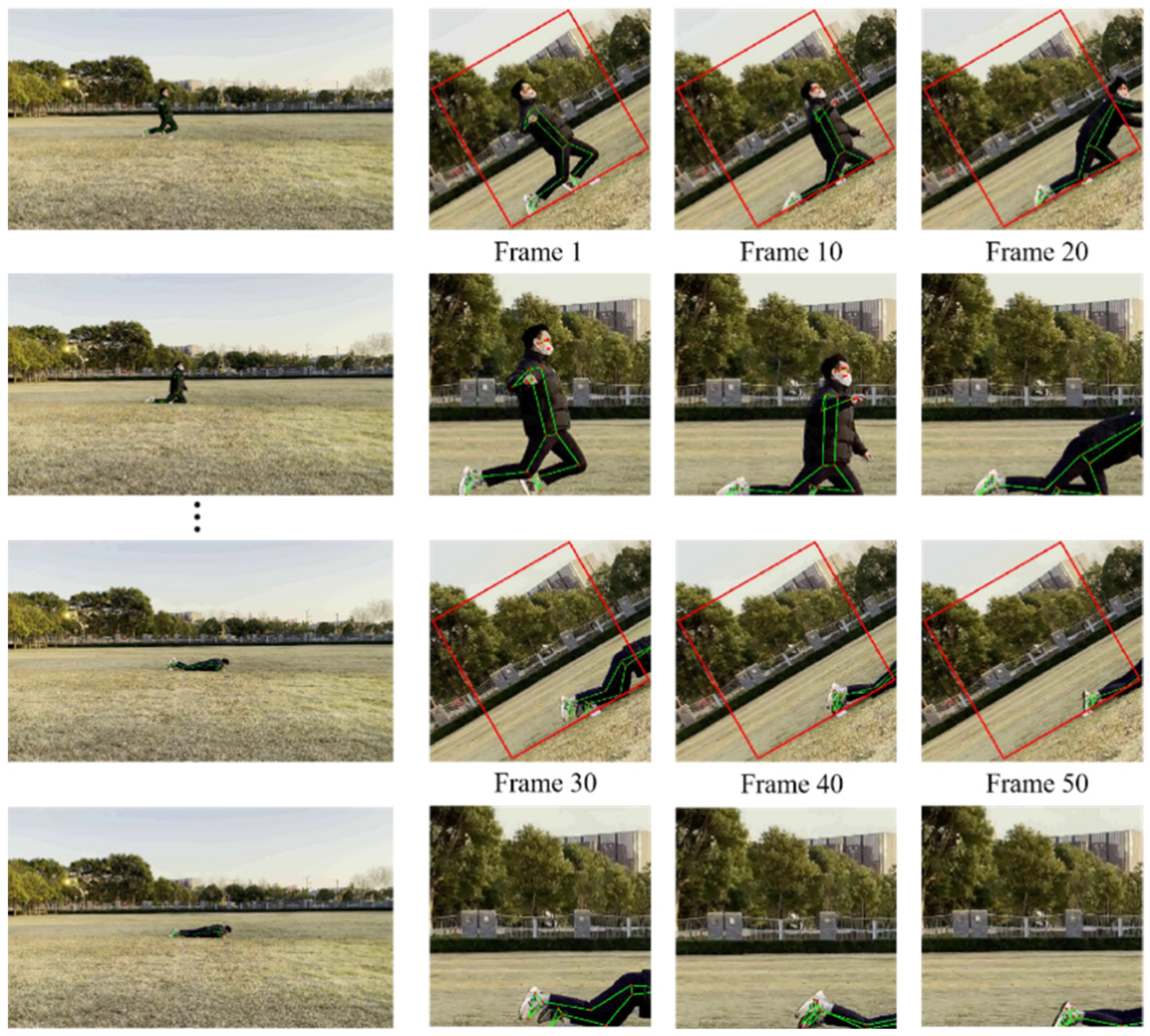
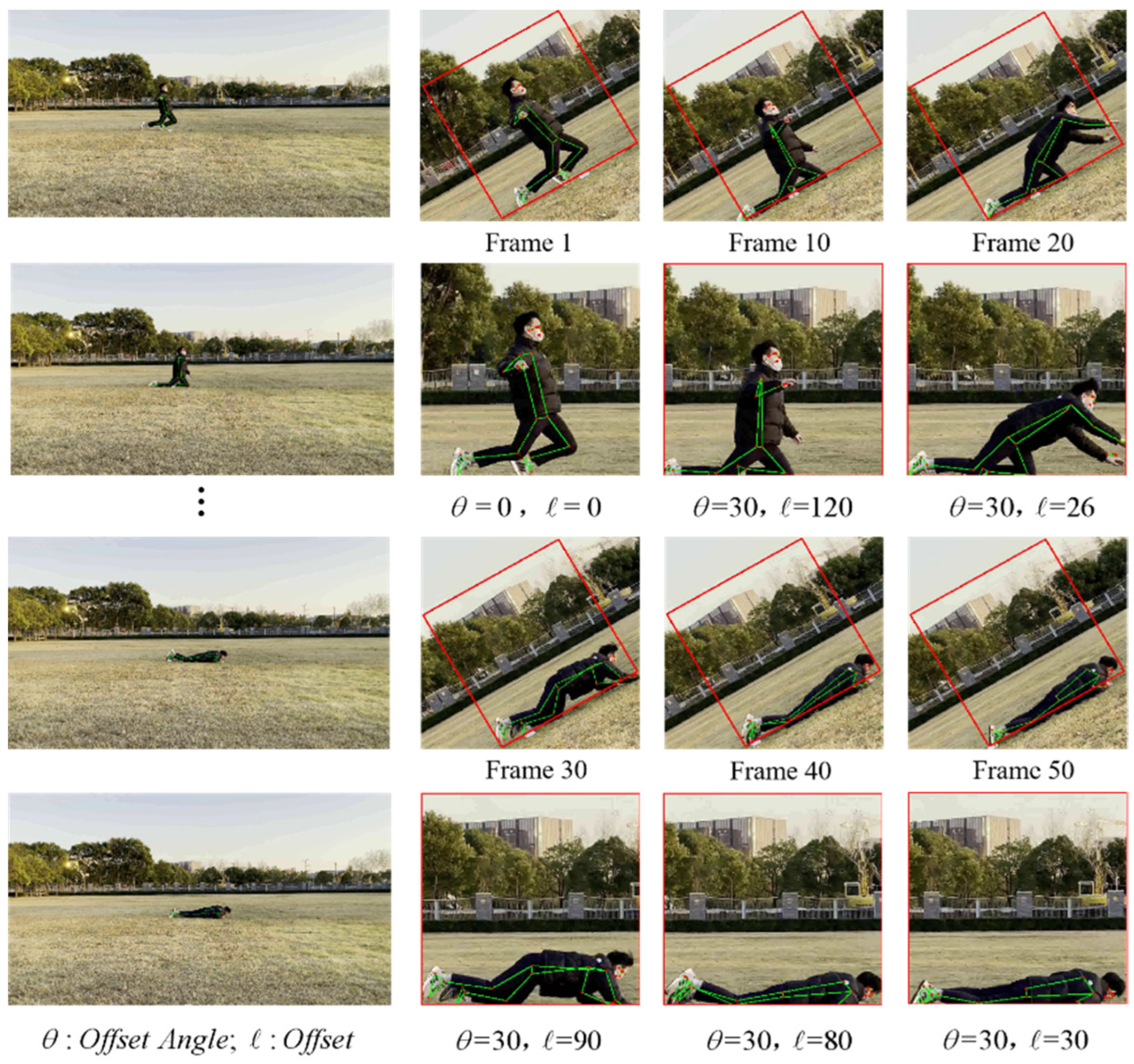
3.2. Optimized Bounding-Box Detector Based on Offset Vector
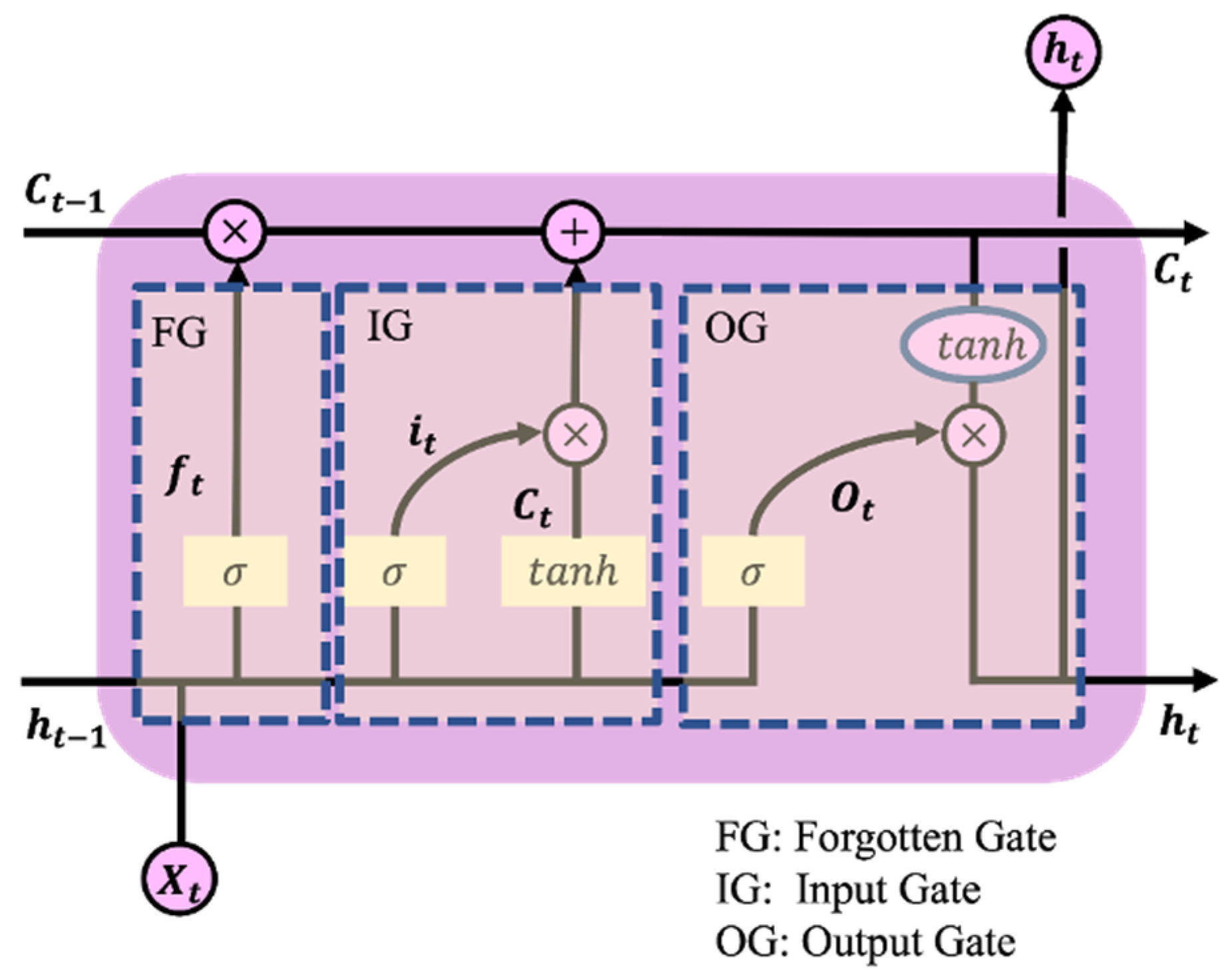
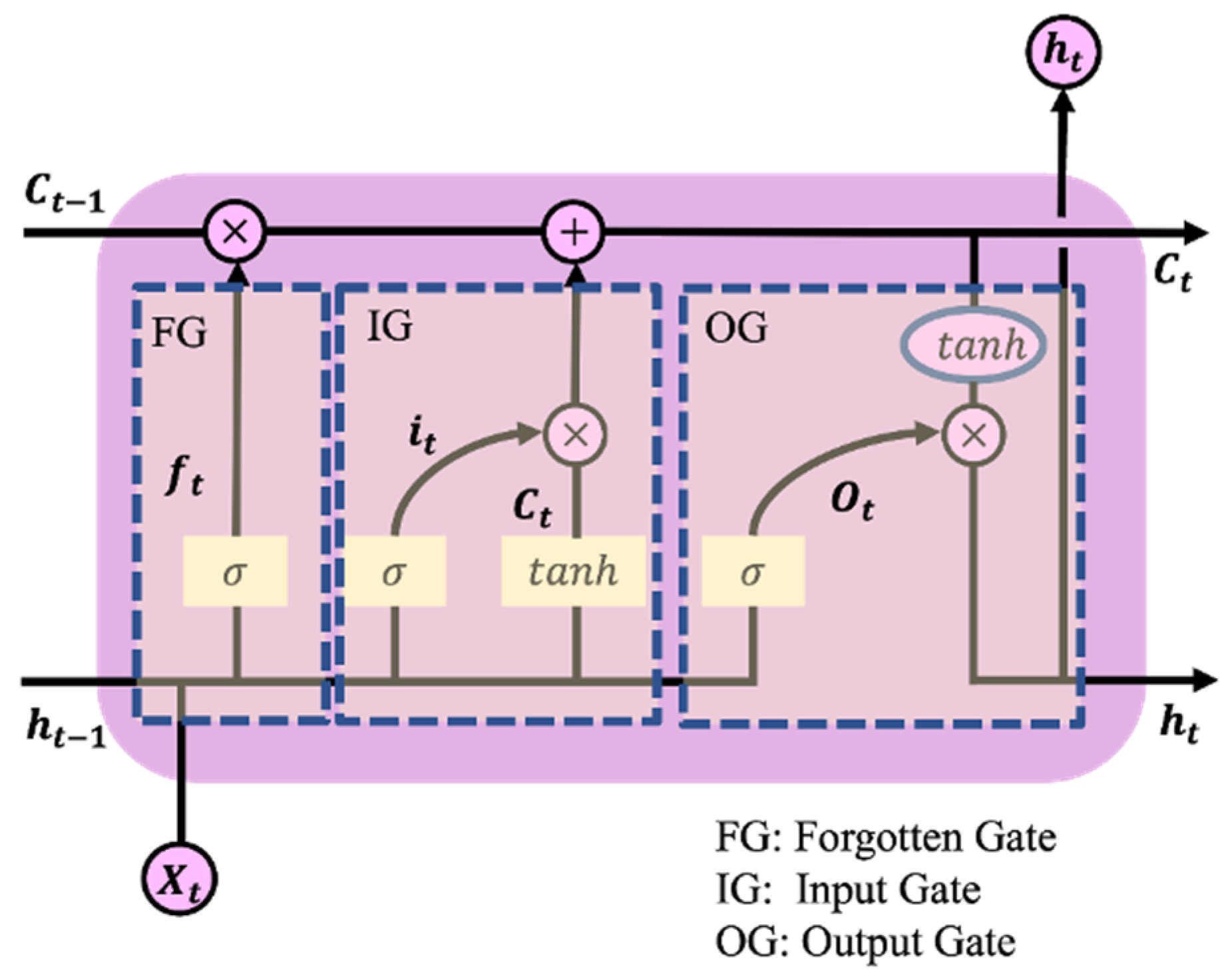
3.3. Long Short-Term Memory Neural Networks
4. Dataset and Experimental Analysis
4.1. Experimental Dataset
4.2. Experimental Environment
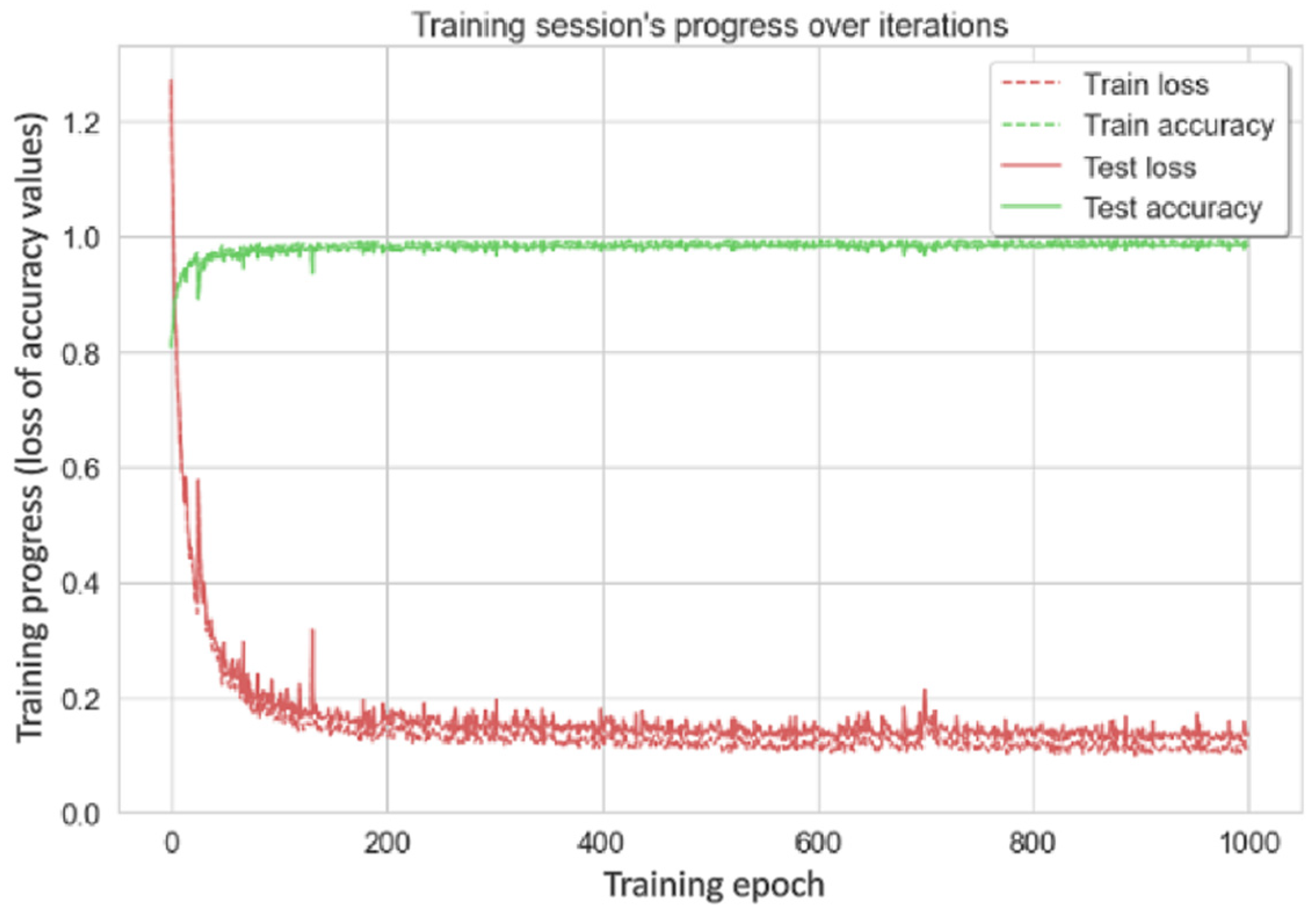
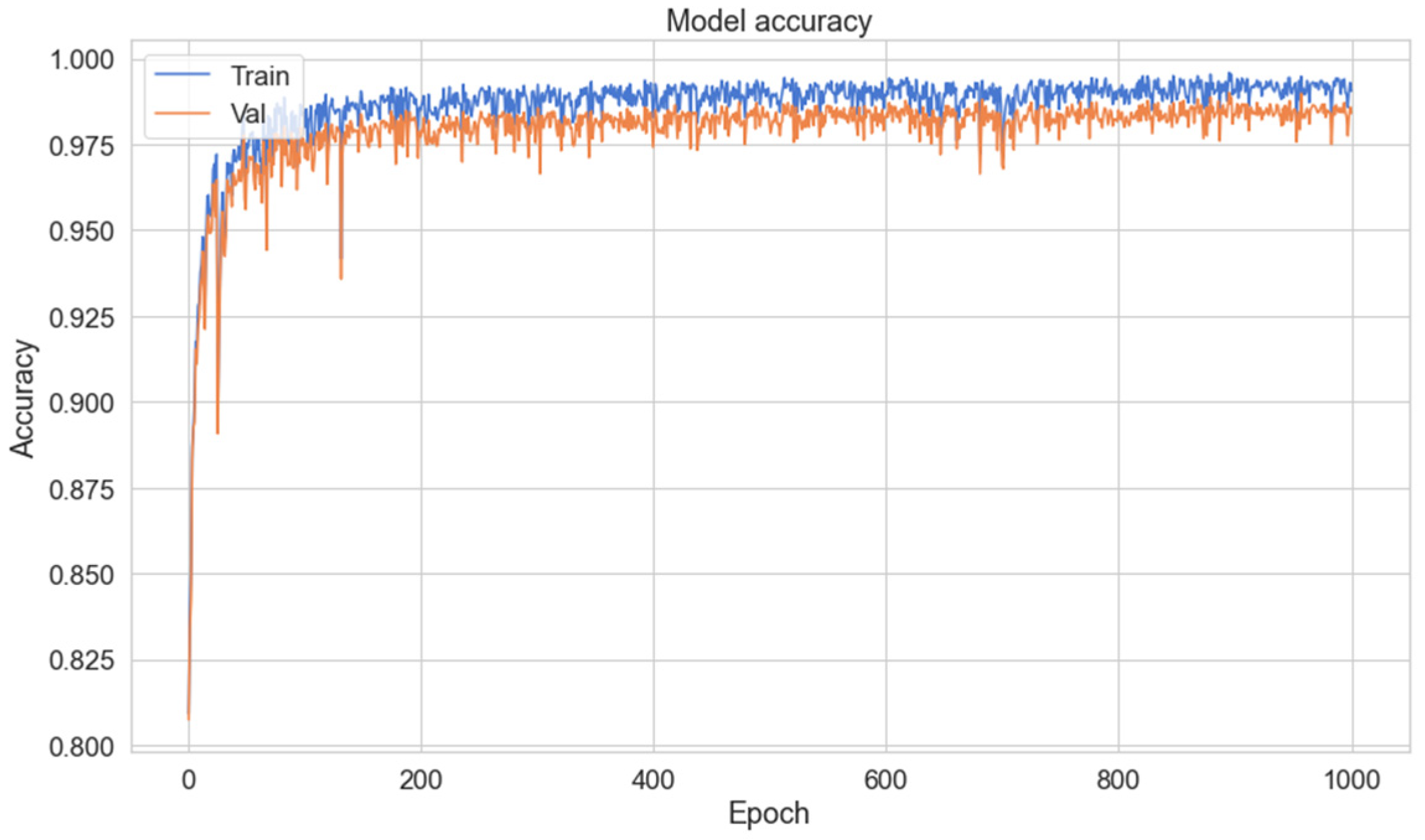
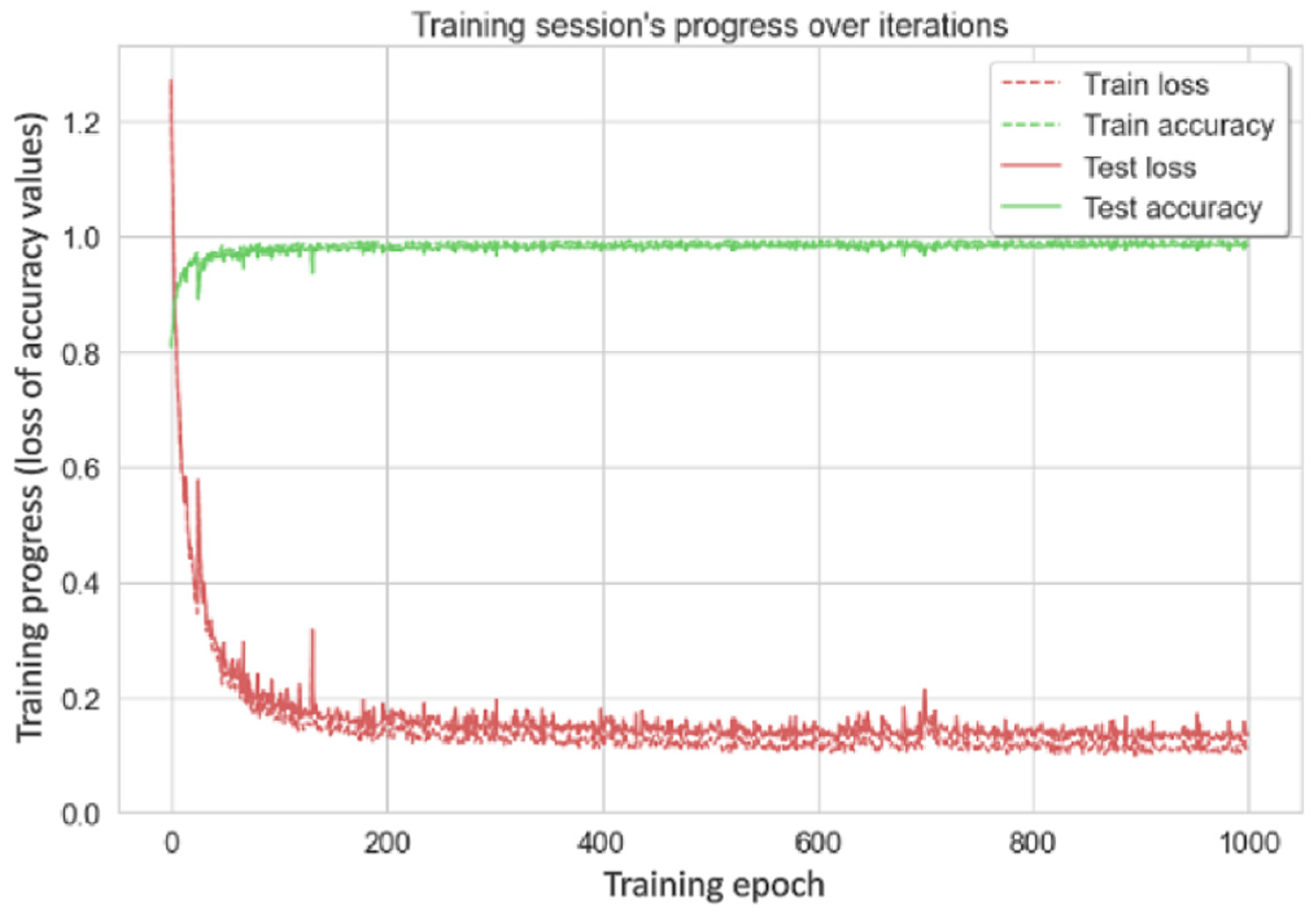
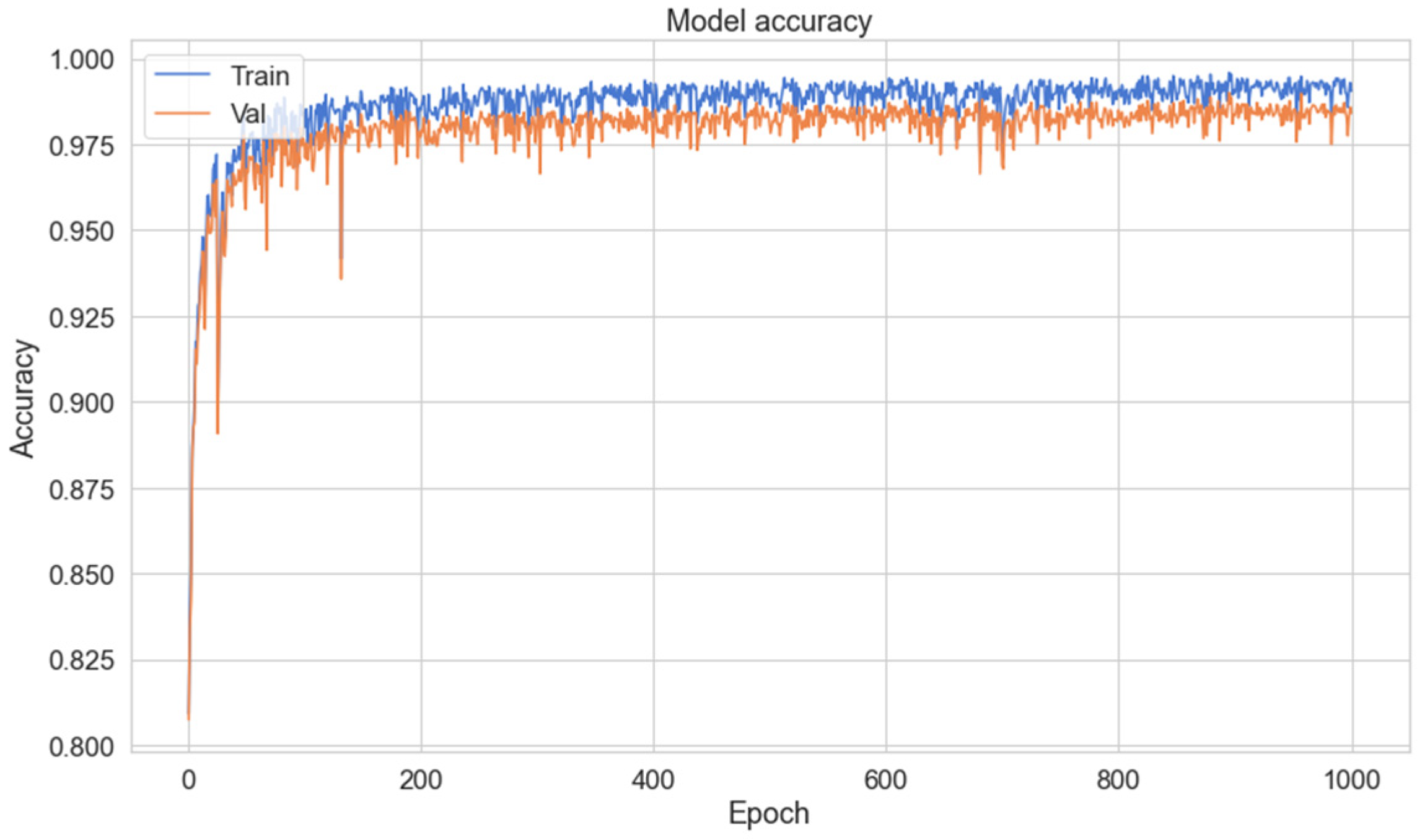
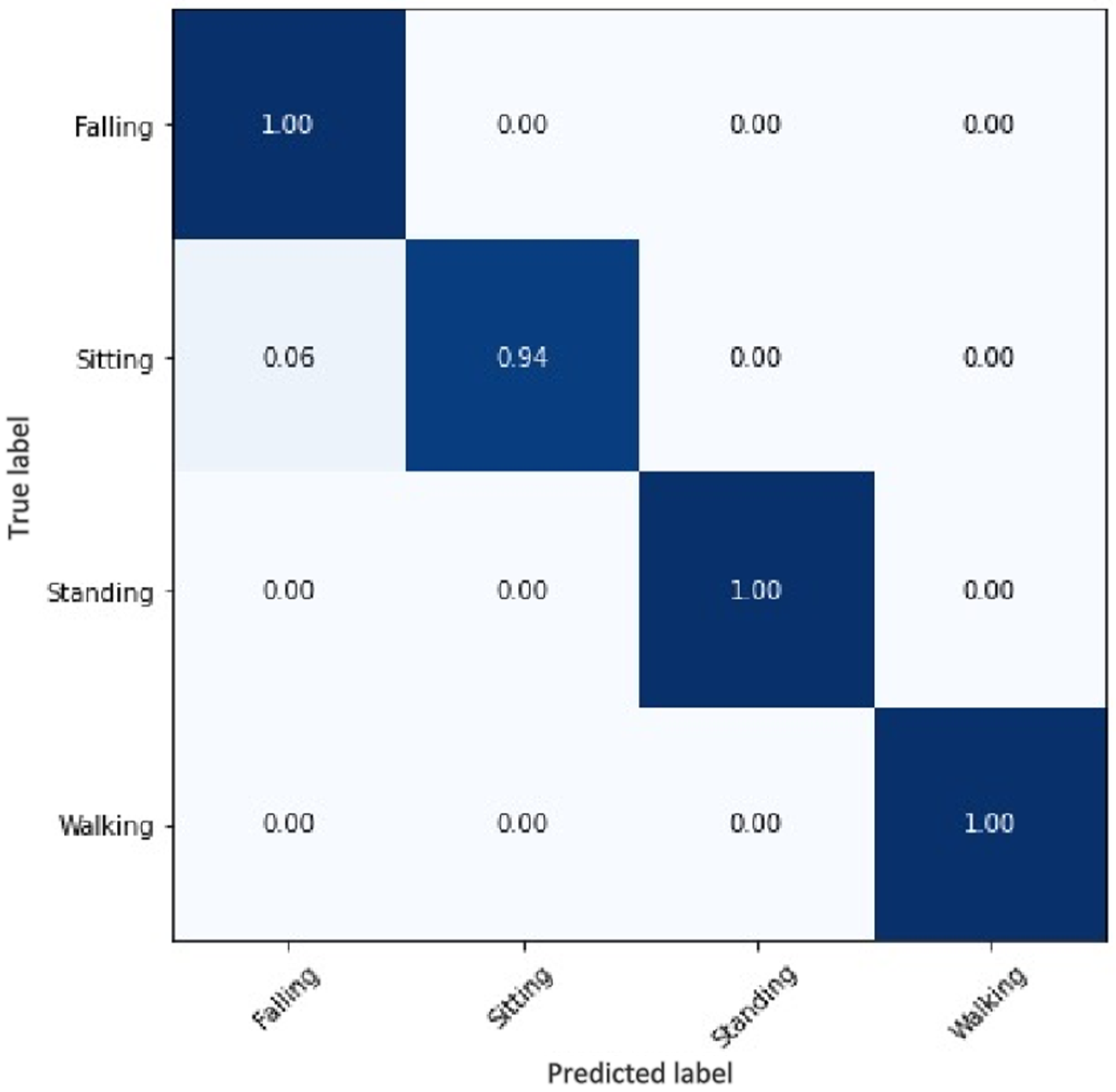
4.3. Experimental Results
4.4. Generalization Experiment of Seafarer Fall Detection on Ships Underway
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lan, H.; Ma, X.; Qiao, W.; Ma, L. On the causation of seafarers’ unsafe acts using grounded theory and association rule. Reliab. Eng. Syst. Saf. 2022, 223, 108498. [Google Scholar] [CrossRef]
- De Cillis, F.; De Simio, F.; Guido, F.; Incalzi, R.A.; Setola, R. Fall-detection solution for mobile platforms using accelerometer and gyroscope data. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Williams, J.; Hill, R.R.; Pignatiello, J.J., Jr.; Chicken, E. Wavelet analysis of variance box plot. J. Appl. Stat. 2021, 1–28. [Google Scholar] [CrossRef]
- Lu, N.; Wu, Y.; Feng, L.; Song, J. Deep Learning for Fall Detection: Three-Dimensional CNN Combined with LSTM on Video Kinematic Data. IEEE J. Biomed. Health Inform. 2018, 23, 314–323. [Google Scholar] [CrossRef]
- Li, H.; Shrestha, A.; Heidari, H.; Le Kernec, J.; Fioranelli, F. Bi-LSTM Network for Multimodal Continuous Human Activity Recognition and Fall Detection. IEEE Sens. J. 2019, 20, 1191–1201. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.-B.; Dong, Z.; Kuan, W.-K.; Huang, Y.-F. A Framework for Fall Detection Based on OpenPose Skeleton and LSTM/GRU Models. Appl. Sci. 2020, 11, 329. [Google Scholar] [CrossRef]
- Xu, C.; Xu, Y.; Xu, Z.; Guo, B.; Zhang, C.; Huang, J.; Deng, X. Fall Detection in Elevator Cages Based on XGBoost and LSTM. In Proceedings of the 2021 26th International Conference on Automation and Computing (ICAC), Portsmouth, UK, 2–4 September 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar]
- Bazarevsky, V.; Grishchenko, I.; Raveendran, K.; Zhu, T.; Zhang, F.; Grundmann, M. Blazepose: On-device real-time body pose tracking. arXiv 2020, arXiv:2006.10204. [Google Scholar]
- Wang, B.; Guo, L.; Zhang, H.; Guo, Y.-X. A Millimetre-Wave Radar-Based Fall Detection Method Using Line Kernel Convolutional Neural Network. IEEE Sens. J. 2020, 20, 13364–13370. [Google Scholar] [CrossRef]
- Usmani, S.; Saboor, A.; Haris, M.; Khan, M.; Park, H. Latest Research Trends in Fall Detection and Prevention Using Machine Learning: A Systematic Review. Sensors 2021, 21, 5134. [Google Scholar] [CrossRef]
- Liang, S.; Chu, T.; Lin, D.; Ning, Y.; Li, H.; Zhao, G. Pre-impact alarm system for fall detection using MEMS sensors and HMM-based SVM classifier. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, Hawaii, 17–21 July 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Bucinskas, V.; Dzedzickis, A.; Rozene, J.; Subaciute-Zemaitiene, J.; Satkauskas, I.; Uvarovas, V.; Bobina, R.; Morkvenaite-Vilkonciene, I. Wearable Feet Pressure Sensor for Human Gait and Falling Diagnosis. Sensors 2021, 21, 5240. [Google Scholar] [CrossRef]
- Yuan, X.; Yu, S.; Dan, Q.; Wang, G.; Liu, S. Fall detection analysis with wearable MEMS-based sensors. In Proceedings of the 2015 16th International Conference on Electronic Packaging Technology (ICEPT), Changsha, China, 11–14 August 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Desai, K.; Mane, P.; Dsilva, M.; Zare, A.; Shingala, P.; Ambawade, D. A novel machine learning based wearable belt for fall detection. In Proceedings of the 2020 IEEE International Conference on Computing, Power and Communication Technologies (GUCON), Greater Noida, India, 2–4 September 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Abdo, H.; Amin, K.M.; Hamad, A.M. Fall detection based on RetinaNet and MobileNet convolutional neural networks. In Proceedings of the 2020 15th International Conference on Computer Engineering and Systems (ICCES), Cairo, Egypt, 15–16 December 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Chen, Y.; Du, R.; Luo, K.; Xiao, Y. Fall detection system based on real-time pose estimation and SVM. In Proceedings of the 2021 IEEE 2nd International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE), Nanchang, China, 26–28 March 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar]
- Ramirez, H.; Velastin, S.A.; Aguayo, P.; Fabregas, E.; Farias, G. Human Activity Recognition by Sequences of Skeleton Features. Sensors 2022, 22, 3991. [Google Scholar] [CrossRef]
- Bourke, A.K.; O’brien, J.V.; Lyons, G.M. Evaluation of a threshold-based triaxial accelerometer fall detection algorithm. Gait Posture 2007, 26, 194–199. [Google Scholar] [CrossRef] [PubMed]
- Rastogi, S.; Singh, J. A systematic review on machine learning for fall detection system. Comput. Intell. 2021, 37, 951–974. [Google Scholar] [CrossRef]
- Hussain, F.; Hussain, F.; Ehatisham-Ul-Haq, M.; Azam, M.A. Activity-Aware Fall Detection and Recognition Based on Wearable Sensors. IEEE Sens. J. 2019, 19, 4528–4536. [Google Scholar] [CrossRef]
- Singha, R.G.; Lad, M.; Shipurkar, G.M.; Rohekar, M.; Chauhan, C.; Rathod, N. Dynamic Pose Diagnosis with BlazePose and LSTM for Spinal Dysfunction Risk Estimation. In Proceedings of the 2022 4th International Conference on Smart Systems and Inventive Technology (ICSSIT), Tirunelveli, India, 20–22 January 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar]
- Bilski, P.; Mazurek, P.; Wagner, J.; Winiecki, W. Application of Decision trees to the Fall Detection of elderly People using Depth-based sensors. In Proceedings of the IEEE International Conference on Intelligent Data Acqut and Advanced Computing Systems (IDAACS 2015), Prague, Czech Republic, 30 August–4 September 2015. [Google Scholar]
- Younis, B.; Ali, J.; Farman, H. Fall Detection System Using Novel Median Deviated Ternary Patterns and SVM. In Proceedings of the 2021 4th International Symposium on Advanced Electrical and Communication Technologies (ISAECT), Virtual, 6–8 December 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar]
- Shi, J.; Chen, D.; Wang, M. Pre-Impact Fall Detection with CNN-Based Class Activation Mapping Method. Sensors 2020, 20, 4750. [Google Scholar] [CrossRef] [PubMed]
- Musci, M.; De Martini, D.; Blago, N.; Facchinetti, T.; Piastra, M. Online fall detection using recurrent neural networks. arXiv 2018, arXiv:1804.04976. [Google Scholar]
- Queralta, J.P.; Gia, T.N.; Tenhunen, H.; Westerlund, T. Edge-AI in LoRa-based health monitoring: Fall detection system with fog computing and LSTM recurrent neural networks. In Proceedings of the 2019 42nd International Conference on Telecommunications and Signal Processing (TSP), Budapest, Hungary, 1–3 July 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Maitre, J.; Bouchard, K.; Gaboury, S. Fall Detection with UWB Radars and CNN-LSTM Architecture. IEEE J. Biomed. Health Inform. 2020, 25, 1273–1283. [Google Scholar] [CrossRef]
- Kreiss, S.; Lorenzo, B.; Alexandre, A. Openpifpaf: Composite fields for semantic keypoint detection and spatio-temporal association. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Taylor, J.; Shotton, J.; Sharp, T.; Fitzgibbon, A. The Vitruvian manifold: Inferring dense correspondences for one-shot human pose estimation. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Hasan, M.; Islam, S.; Abdullah, S. Robust Pose-Based Human Fall Detection Using Recurrent Neural Network. In Proceedings of the 2019 IEEE International Conference on Robotics, Automation, Artificial-intelligence and Internet-of-Things (RAAICON), Dhaka, Bangladesh, 29 November–1 December 2019; pp. 48–51. [Google Scholar]
- Lee, D.-W.; Jun, K.; Naheem, K.; Kim, M.S. Deep Neural Network–Based Double-Check Method for Fall Detection Using IMU-L Sensor and RGB Camera Data. IEEE Access 2021, 9, 48064–48079. [Google Scholar] [CrossRef]
- Juneau, P.; Baddour, N.; Burger, H.; Bavec, A.; Lemaire, E.D. Comparison of Decision Tree and Long Short-Term Memory Approaches for Automated Foot Strike Detection in Lower Extremity Amputee Populations. Sensors 2021, 21, 6974. [Google Scholar] [CrossRef]
- Yan, H.; Qin, Y.; Xiang, S.; Wang, Y.; Chen, H. Long-term gear life prediction based on ordered neurons LSTM neural networks. Measurement 2020, 165, 108205. [Google Scholar] [CrossRef]
- Yang, J.; Peng, Y.; Xie, J.; Wang, P. Remaining Useful Life Prediction Method for Bearings Based on LSTM with Uncertainty Quantification. Sensors 2022, 22, 4549. [Google Scholar] [CrossRef] [PubMed]
- Mrozek, D.; Koczur, A.; Małysiak-Mrozek, B. Fall detection in older adults with mobile IoT devices and machine learning in the cloud and on the edge. Inf. Sci. 2020, 537, 132–147. [Google Scholar] [CrossRef]
- Lina, W.; Ding, J. Behavior detection method of OpenPose combined with Yolo network. In Proceedings of the 2020 International Conference on Communications, Information System and Computer Engineering (CISCE), Kuala Lumpur, Malaysia, 3–5 July 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Casilari, E.; Lora-Rivera, R.; García-Lagos, F. A Study on the Application of Convolutional Neural Networks to Fall Detection Evaluated with Multiple Public Datasets. Sensors 2020, 20, 1466. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Musci, M.; De Martini, D.; Blago, N.; Facchinetti, T.; Piastra, M. Online Fall Detection Using Recurrent Neural Networks on Smart Wearable Devices. IEEE Trans. Emerg. Top. Comput. 2020, 9, 1276–1289. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network | Comparison | ||
|---|---|---|---|
| Accuracy | Verify Image | Image Resolution | |
| LSTM | 89% | 500 | 1920 × 1080 |
| RNN | 36% | 500 | 1920 × 1080 |
| LSTM | 97% | 100 | 720 × 480 |
| RNN | 91% | 100 | 720 × 480 |
| Sample | Age | Height | Weight | Sex | Environment |
|---|---|---|---|---|---|
| Sample 1 | 24 | 168 cm | 62 Kg | Male | Field |
| Sample 2 | 25 | 162 cm | 47 Kg | Female | Field |
| Sample 3 | 39 | 176 cm | 74 Kg | Male | Cabin |
| Dataset Source | Data Quantity | Data Proportion | Data Acquisition Equipment |
|---|---|---|---|
| Self-made dataset | 3770 | 33.38% | RGB Camera |
| URFall public dataset | 2995 | 26.52% | Kinect Camera |
| FDD public dataset | 4527 | 40.09% | RGB Camera |
| Experimental Conditions | Parameters |
|---|---|
| CPU | Intel(R) Xeon(R) CPU E5-1650 v2 @ 3.50 GHz 3.50 GHz |
| GPU | GeForce GTX970 |
| Memory | 8 G |
| Hard disk | 1 T |
| System | Windows 10 Professional Edition |
| Language | python3.8 |
| Frame | TensorFlow1.15.5 |
| Software | Jupyter Notebook |
| Models | Accuracy | Specificity |
|---|---|---|
| OpenPose-YOLO | 95.43% | 96.8% |
| CNN | 96.97% | 95.44% |
| Stacked LSTM | 96.94% | 97.15% |
| BlazePose–LSTM (Ours) | 100% | 98.5% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Liu, X.; Hu, Y.; Shi, J.; Chen, X.; Zhao, J.; Wang, S.; Hu, Q. Fall Detection for Shipboard Seafarers Based on Optimized BlazePose and LSTM. Sensors 2022, 22, 5449. https://doi.org/10.3390/s22145449
Liu W, Liu X, Hu Y, Shi J, Chen X, Zhao J, Wang S, Hu Q. Fall Detection for Shipboard Seafarers Based on Optimized BlazePose and LSTM. Sensors. 2022; 22(14):5449. https://doi.org/10.3390/s22145449
Chicago/Turabian StyleLiu, Wei, Xu Liu, Yuan Hu, Jie Shi, Xinqiang Chen, Jiansen Zhao, Shengzheng Wang, and Qingsong Hu. 2022. "Fall Detection for Shipboard Seafarers Based on Optimized BlazePose and LSTM" Sensors 22, no. 14: 5449. https://doi.org/10.3390/s22145449
APA StyleLiu, W., Liu, X., Hu, Y., Shi, J., Chen, X., Zhao, J., Wang, S., & Hu, Q. (2022). Fall Detection for Shipboard Seafarers Based on Optimized BlazePose and LSTM. Sensors, 22(14), 5449. https://doi.org/10.3390/s22145449