
A Novel Carrier Loop Based on Coarse-to-Fine Weighted Adaptive Kalman Filter for Weak Communication-Positioning Integrated Signal


Abstract
:1. Introduction
2. System Model
2.1. Signal Model
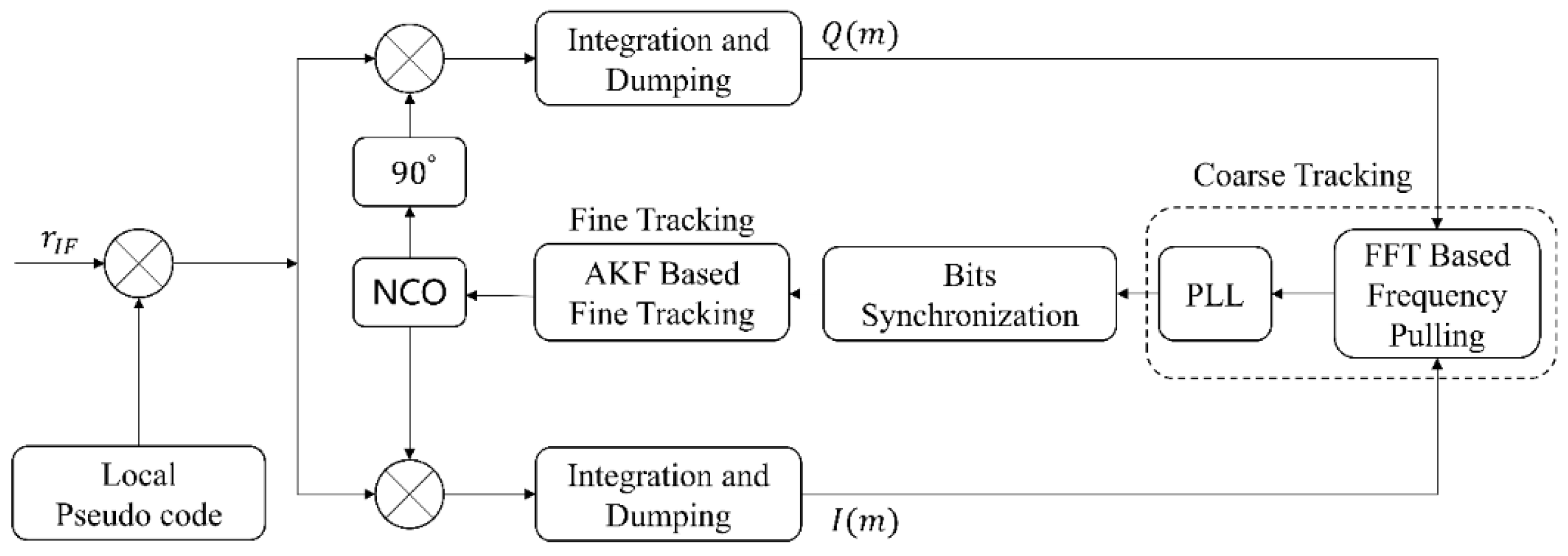
2.2. Traditional Coarse-to-Fine Carrier Tracking Scheme
3. Proposed Weighted Adaptive Kalman-Filter-Based Coarse-To-Fine Carrier Tracking Loop
3.1. WAKF-Based Fine Carrier Tracking Algorithm
3.2. Coarse-to-Fine WAKF-Based Carrier Tracking Algorithm
- Initialize FFT points in the coarse tracking stage, and the bandwidth of the second-order phase-locked loop;
- The first step of coarse tracking: First, The times of loop updates in the carrier frequency pulling process is configured as , and the loop stores the integral values of the I/Q channels in sequence every , and obtains the integral value sequence of length and then performs an FFT operation on the sequence S′(m) to obtain the index corresponding to the maximum amplitude, and obtain the residual carrier frequency estimation value according to Formula (9). The second step of rough tracking: after completing the frequency pulling, the loop enters the second-order phase-locked loop for stable tracking, and the loop adjusts the carrier NCO every ;
- The coarse tracking stage ends when the bit synchronization is successful. The tracking loop can enter the fine tracking loop based on the WAKF algorithm from the coarse tracking stage. If bit synchronization is unsuccessful, the loop remains in the coarse tracking stage.
- The loop enters the fine tracking stage. The process noise covariance matrix and the measurement noise covariance matrix , the state vector matrix , and the state vector error covariance matrix are initialized. The loop based on the WAKF algorithm updates the loop every integration time . After the bit synchronization is successful, the integration value is not affected by the navigation data, and the integration time can be lengthened to realize the tracking of weak signals. The estimation of carrier phase and carrier frequency is achieved by the previously mentioned WAKF algorithm iterative equations. The carrier NCO performs loop adjustment according to the result output by the WAKF algorithm.
4. Simulation and Analysis
4.1. Simulation and Real Data Tests
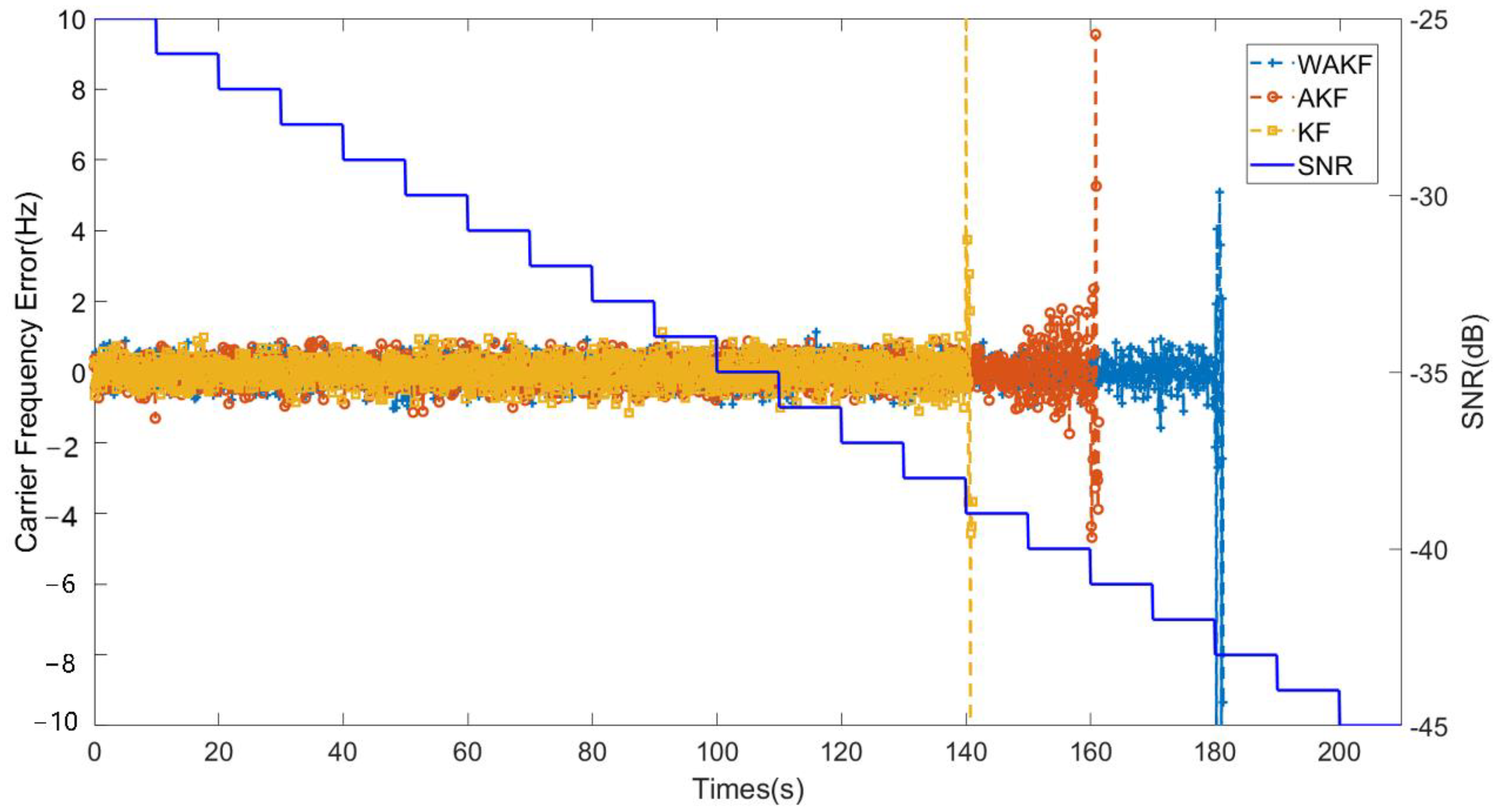
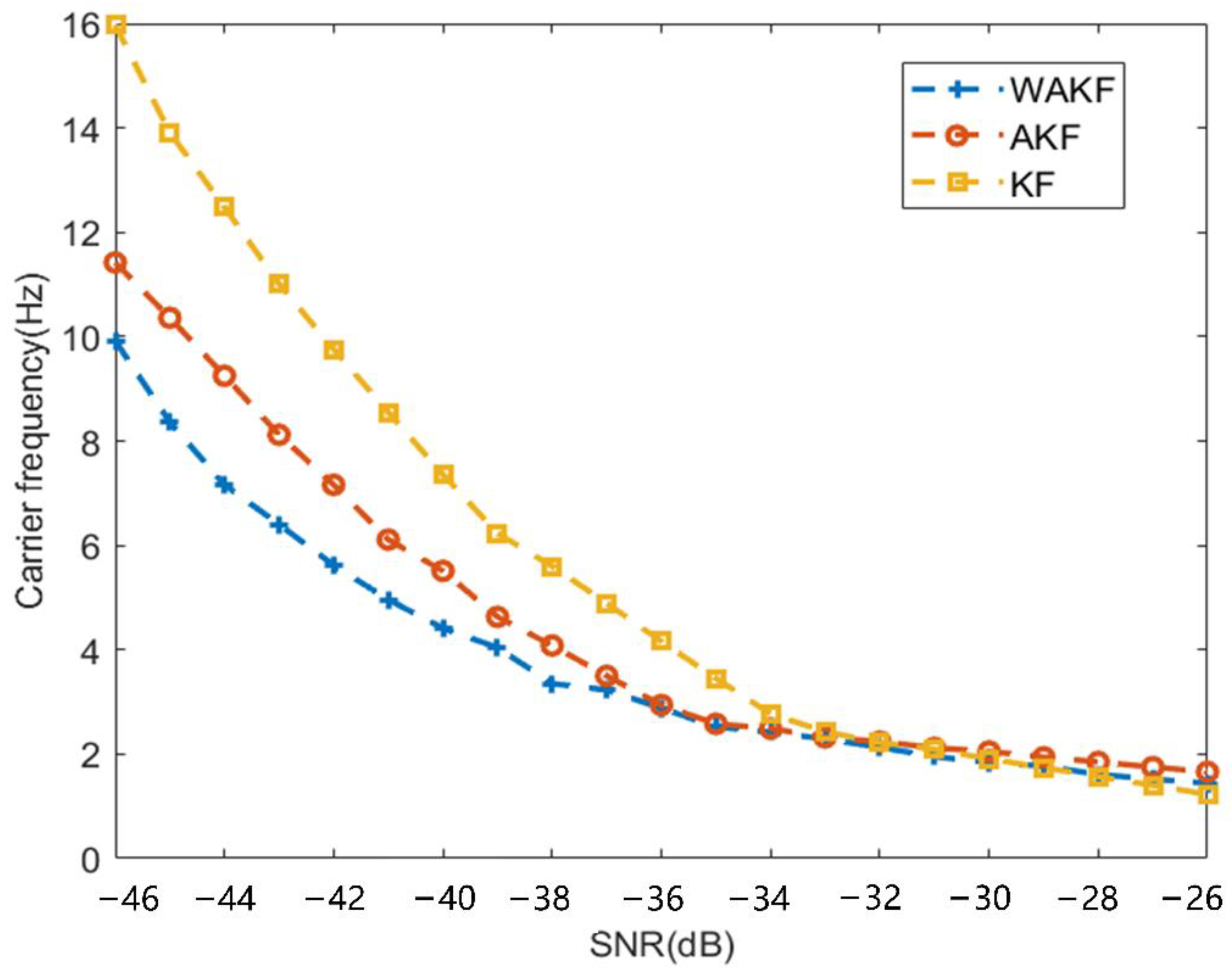
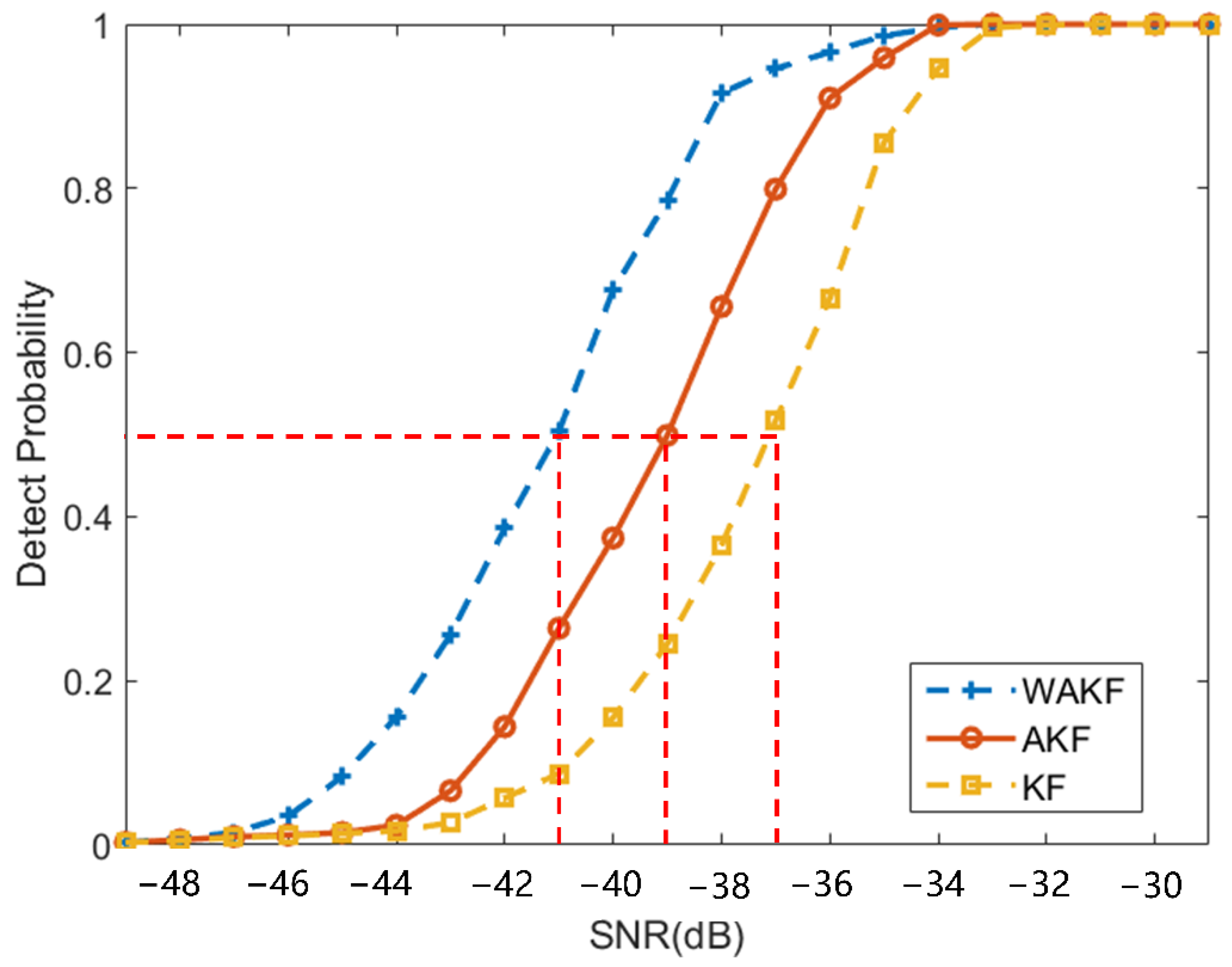
4.1.1. Tracking Sensitivity
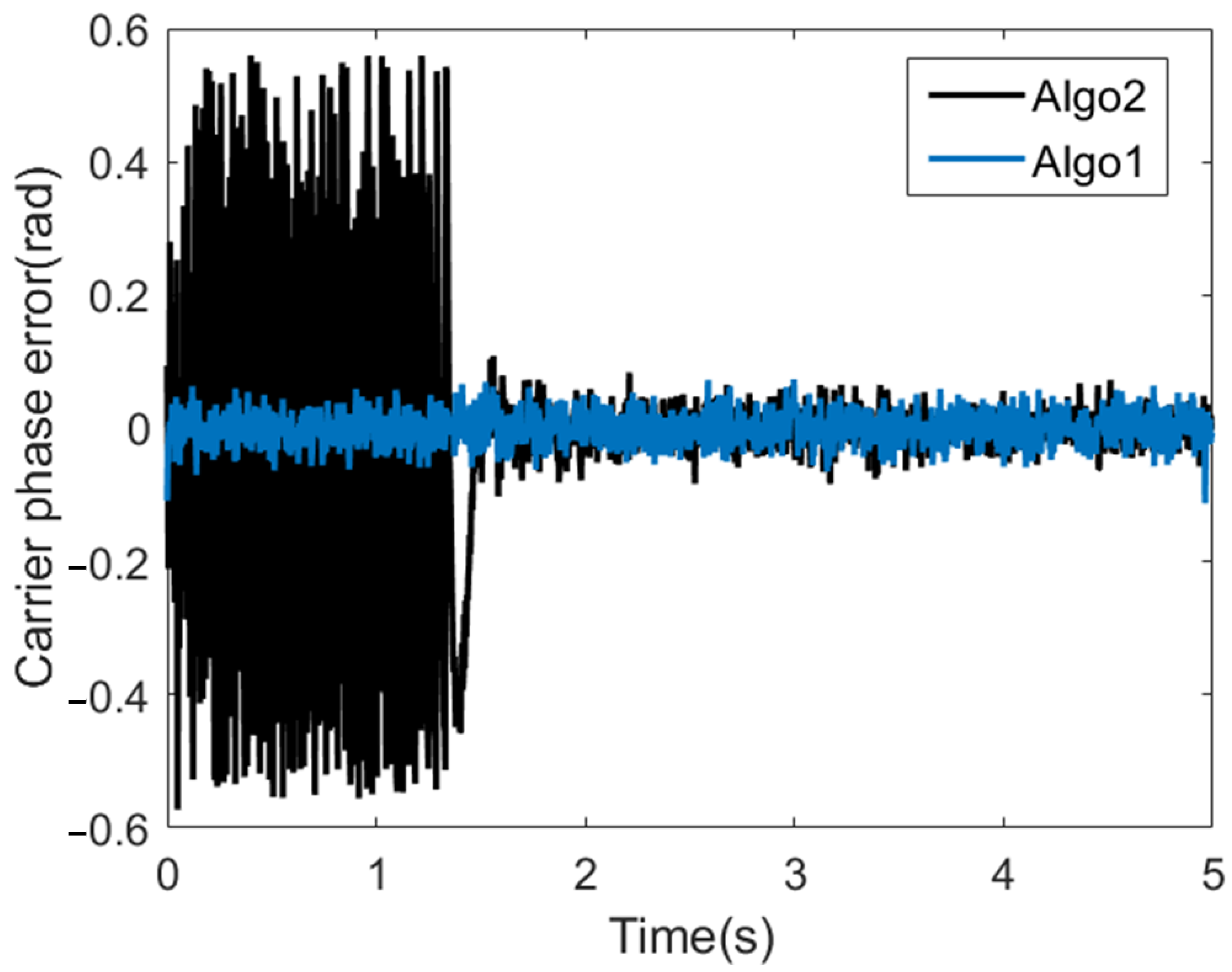
4.1.2. Convergence Speed
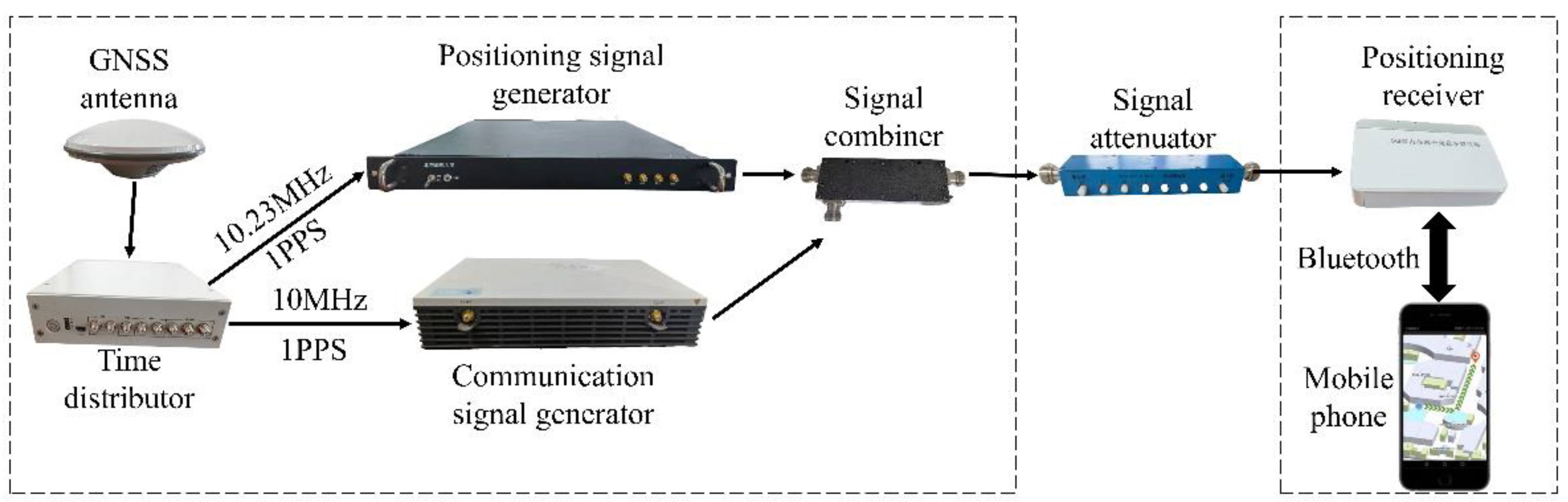
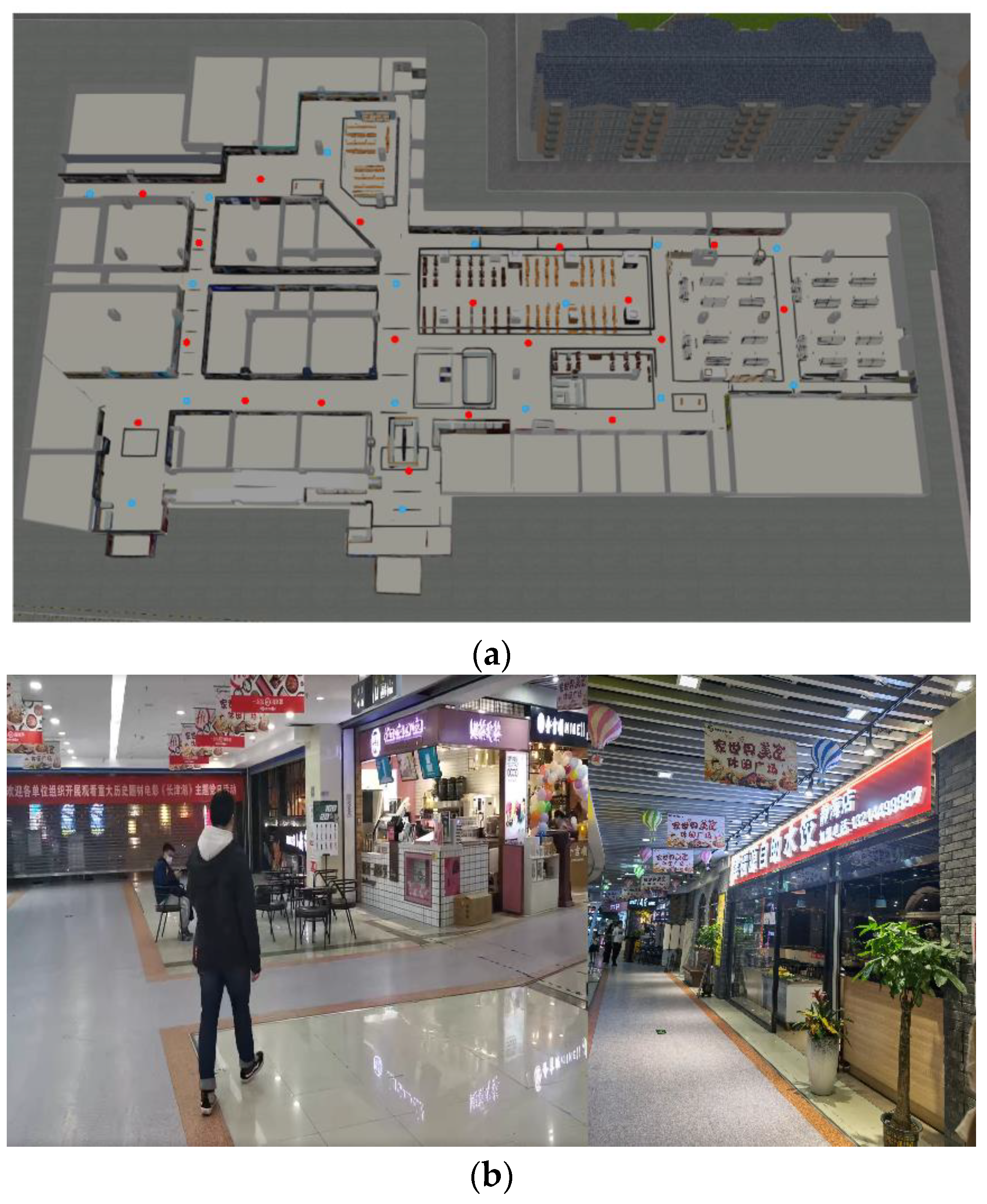
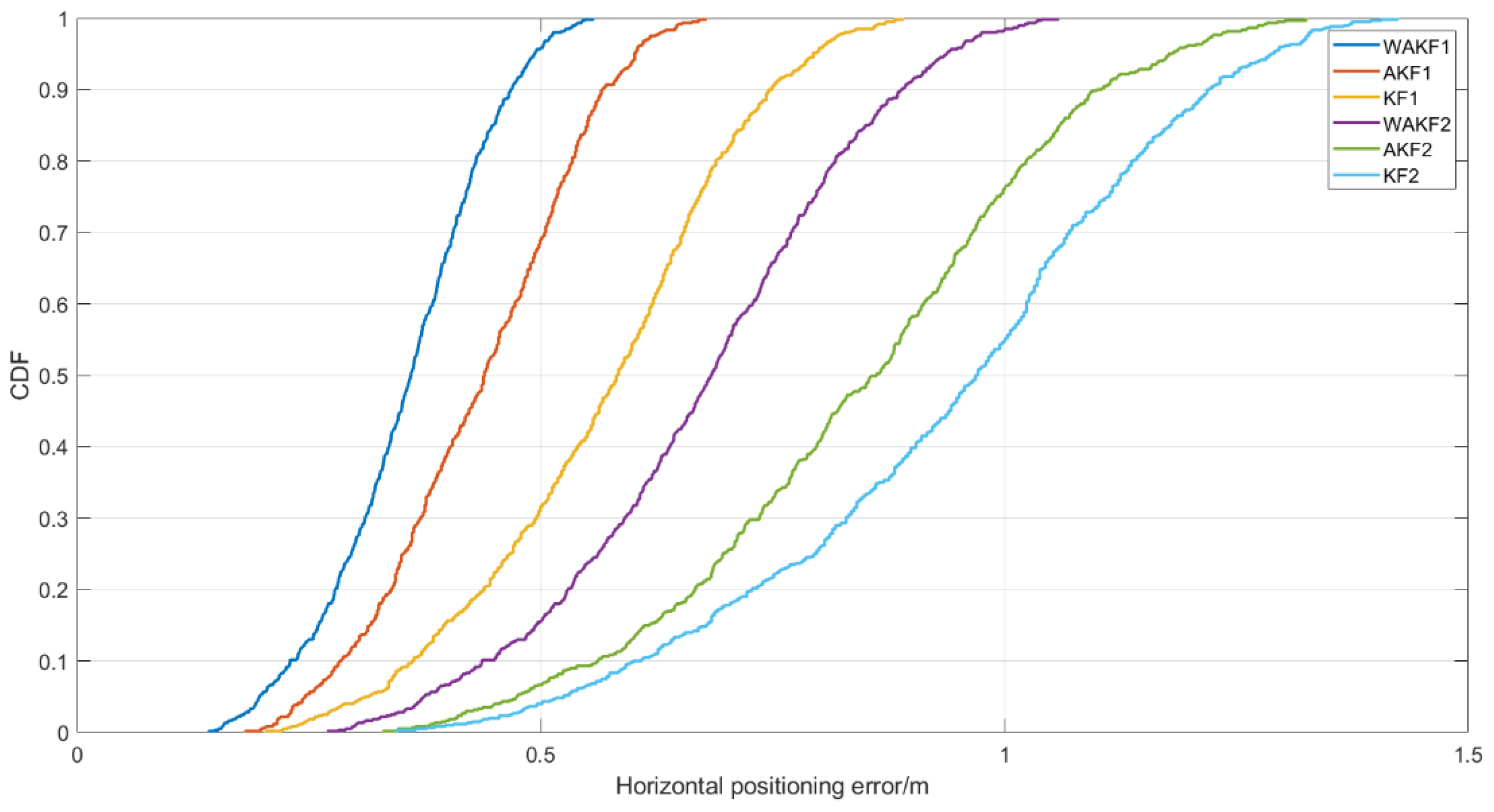
4.2. Real Data Tests
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Seco-Granados, G.; Lopez-Salcedo, J.A.; Jimenez-Banos, D.; Lopez-Risueno, G. Challenges in Indoor Global Navigation Satellite Systems Unveiling its core features in signal processing. IEEE Signal Process. Mag. 2012, 29, 108–131. [Google Scholar] [CrossRef]
- Ren, T.; Petovello, M.G. A Stand-Alone Approach for High-Sensitivity GNSS Receivers in Signal-Challenged Environment. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2438–2448. [Google Scholar] [CrossRef]
- Yin, L.; Ni, Q.; Deng, Z. A GNSS/5G Integrated Positioning Methodology in D2D Communication Networks. IEEE J. Sel. Areas Commun. 2018, 36, 351–362. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. Location Fingerprinting With Bluetooth Low Energy Beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Canton Paterna, V.; Calveras Auge, A.; Paradells Aspas, J.; Perez Bullones, M.A. A Bluetooth Low Energy Indoor Positioning System with Channel Diversity, Weighted Trilateration and Kalman Filtering. Sensors 2017, 17, 2927. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, W.; Xue, M.; Yu, H.; Tang, H.; Lin, A. Augmentation of Fingerprints for Indoor WiFi Localization Based on Gaussian Process Regression. IEEE Trans. Veh. Technol. 2018, 67, 10896–10905. [Google Scholar] [CrossRef]
- Koo, J.; Cha, H. Unsupervised Locating of WiFi Access Points Using Smartphones. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2012, 42, 1341–1353. [Google Scholar] [CrossRef]
- Tian, Q.; Wang, K.I.K.; Salcic, Z. A Low-Cost INS and UWB Fusion Pedestrian Tracking System. IEEE Sens. J. 2019, 19, 3733–3740. [Google Scholar] [CrossRef]
- Brida, P.; Machaj, J.; Benikovsky, J.; Duha, J. An Experimental Evaluation of AGA Algorithm for RSS Positioning in GSM Networks. Elektron. Elektrotechnika 2010, 104, 113–118. [Google Scholar]
- Zeytinci, M.B.; Sari, V.; Harmanci, F.K.; Anarim, E.; Akar, M. Location estimation using RSS measurements with unknown path loss exponents. Eurasip J. Wirel. Commun. Netw. 2013, 2013, 178. [Google Scholar] [CrossRef] [Green Version]
- del Peral-Rosado, J.A.; Raulefs, R.; Lopez-Salcedo, J.A.; Seco-Granados, G. Survey of Cellular Mobile Radio Localization Methods: From 1G to 5G. IEEE Commun. Surv. Tutor. 2018, 20, 1124–1148. [Google Scholar] [CrossRef]
- Menta, E.Y.; Malm, N.; Jantti, R.; Ruttik, K.; Costa, M.; Leppanen, K. On the Performance of AoA-Based Localization in 5G Ultra-Dense Networks. IEEE Access 2019, 7, 33870–33880. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Camarinha-Matos, L.M.; Oliveira, L.B. Distributed Localization with Complemented RSS and AOA Measurements: Theory and Methods. Appl. Sci. 2020, 10, 272. [Google Scholar] [CrossRef] [Green Version]
- Sivers, M.; Fokin, G. LTE Positioning Accuracy Performance Evaluation; Springer: Cham, Switzerland, 2015; pp. 393–406. [Google Scholar]
- Deng, Z.; Jia, B.; Tang, S.; Fu, X.; Mo, J. Fine Frequency Acquisition Scheme in Weak Signal Environment for a Communication and Navigation Fusion System. Electronics 2019, 8, 829. [Google Scholar] [CrossRef] [Green Version]
- Yin, L.; Cao, J.; Lin, K.; Deng, Z.; Ni, Q. A Novel Positioning-Communication Integrated Signal in Wireless Communication Systems. IEEE Wirel. Commun. Lett. 2019, 8, 1353–1356. [Google Scholar] [CrossRef]
- Deng, Z.; Yu, Y.; Yuan, X.; Wan, N.; Yang, L. Situation and development tendency of indoor positioning. China Commun. 2013, 10, 42–55. [Google Scholar] [CrossRef]
- Deng, Z.; Mo, J.; Jia, B.; Bian, X. An Acquisition Scheme Based on a Matched Filter for Novel Communication and Navigation Fusion Signals. Sensors 2017, 17, 1766. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Bian, X.; Deng, Z.; Mo, J.; Jia, B. A Novel Carrier Loop Algorithm Based on Maximum Likelihood Estimation (MLE) and Kalman Filter (KF) for Weak TC-OFDM Signals. Sensors 2018, 18, 2256. [Google Scholar] [CrossRef] [Green Version]
- Mo, J.; Deng, Z.; Jia, B.; Jiang, H.; Bian, X. A Novel FLL-Assisted PLL With Fuzzy Control for TC-OFDM Carrier Signal Tracking. IEEE Access 2018, 6, 52447–52459. [Google Scholar] [CrossRef]
- Christopher, H.; Elliott, K. Understanding GPS Principles and Applications, 2nd ed.; Artech: Morristown, NJ, USA, 2005; p. 1. [Google Scholar]
- Lopez-Salcedo, J.A.; Del Peral-Rosado, J.A.; Seco-Granados, G. Survey on Robust Carrier Tracking Techniques. IEEE Commun. Surv. Tutor. 2014, 16, 670–688. [Google Scholar] [CrossRef]
- Betz, J.W.; Kolodziejski, K.R. Generalized Theory of Code Tracking with an Early-Late Discriminator Part I: Lower Bound and Coherent Processing. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1538–1556. [Google Scholar] [CrossRef]
- Curran, J.T.; Lachapelle, G.; Murphy, C.C. Improving the Design of Frequency Lock Loops for GNSS Receivers. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 850–868. [Google Scholar] [CrossRef]
- Won, J.-H.; Pany, T.; Eissfeller, B. Characteristics of Kalman Filters for GNSS Signal Tracking Loop. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3671–3681. [Google Scholar] [CrossRef]
- Tian, Y.; Suwoyo, H.; Wang, W.; Mbemba, D.; Li, L. An AEKF-SLAM Algorithm with Recursive Noise Statistic Based on MLE and EM. J. Intell. Robot. Syst. 2020, 97, 339–355. [Google Scholar] [CrossRef]
- Liu, K.; Zhao, W.; Sun, B.; Wu, P.; Zhu, D.; Zhang, P. Application of Updated Sage–Husa Adaptive Kalman Filter in the Navigation of a Translational Sprinkler Irrigation Machine. Water 2019, 11, 1269. [Google Scholar] [CrossRef] [Green Version]
- Song, Q.; Liu, R. Weighted adaptive filtering algorithm for carrier tracking of deep space signal. Chin. J. Aeronaut. 2015, 28, 1236–1244. [Google Scholar] [CrossRef] [Green Version]
- Yan, K.; Ziedan, N.I.; Zhang, H.; Guo, W.; Niu, X.; Liu, J. Weak GPS signal tracking using FFT discriminator in open loop receiver. GPS Solut. 2014, 20, 225–237. [Google Scholar] [CrossRef]
- Cilden Guler, D.; Hajiyev, C. SVD-aided EKF attitude estimation with UD factorized measurement noise covariance. Asian J. Control 2018, 21, 1423–1432. [Google Scholar] [CrossRef]
- Tangudu, J.; Ramasubramanian, K.; Subburaj, K.; Khanna, S.; Chomal, S. Techniques to enhance GNSS signal acquisition and tracking sensitivity. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbéliard/Belfort, France, 28–31 October 2013; pp. 1–10. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Length of PRN code | 10,230 |
| Code rate | 10.23 MHz |
| Sampling rate | 50 MHz |
| Noise baseband of PLL in coarse tracking stage | 10 Hz |
| in coarse tracking stage | 5 ms |
| in fine tracking stage | 10 ms |
| Signal (dBm) | −128 | −129 | −130 | −131 | −132 | −133 | −134 | −135 | −136 | −137 |
|---|---|---|---|---|---|---|---|---|---|---|
| WAKF | Y 1 | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| AKF | Y | Y | Y | Y | Y | Y | Y | Y | - 2 | - |
| KF | Y | Y | Y | Y | Y | Y | - | - | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, X.; Deng, Z.; Liu, J.; Zhang, Z. A Novel Carrier Loop Based on Coarse-to-Fine Weighted Adaptive Kalman Filter for Weak Communication-Positioning Integrated Signal. Sensors 2022, 22, 4068. https://doi.org/10.3390/s22114068
Deng X, Deng Z, Liu J, Zhang Z. A Novel Carrier Loop Based on Coarse-to-Fine Weighted Adaptive Kalman Filter for Weak Communication-Positioning Integrated Signal. Sensors. 2022; 22(11):4068. https://doi.org/10.3390/s22114068
Chicago/Turabian StyleDeng, Xiwen, Zhongliang Deng, Jingrong Liu, and Zhichao Zhang. 2022. "A Novel Carrier Loop Based on Coarse-to-Fine Weighted Adaptive Kalman Filter for Weak Communication-Positioning Integrated Signal" Sensors 22, no. 11: 4068. https://doi.org/10.3390/s22114068
APA StyleDeng, X., Deng, Z., Liu, J., & Zhang, Z. (2022). A Novel Carrier Loop Based on Coarse-to-Fine Weighted Adaptive Kalman Filter for Weak Communication-Positioning Integrated Signal. Sensors, 22(11), 4068. https://doi.org/10.3390/s22114068