
Design and Performance Evaluation of a “Fixed-Point” Spar Buoy Equipped with a Piezoelectric Energy Harvesting Unit for Floating Near-Shore Applications †

 ,
,  ,
,  ,
, 

Abstract
1. Introduction
2. Preliminary Study
2.1. “Fixed-Point” Spar Buoy
2.2. Wave Motion Measurement
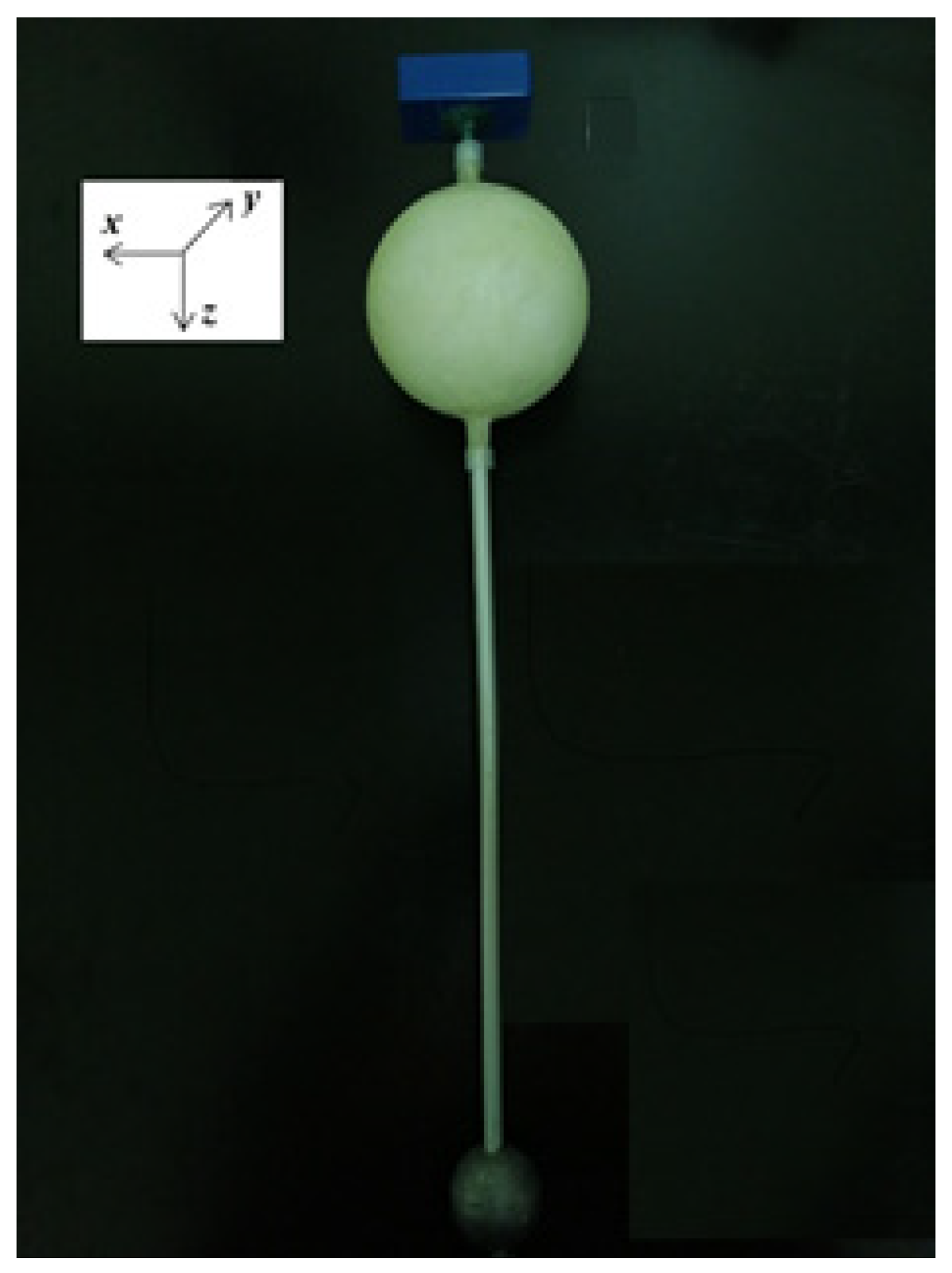
2.3. Spar-Buoy Scaled Model
3. Materials and Methods
3.1. Piezoelectric Energy Harvester
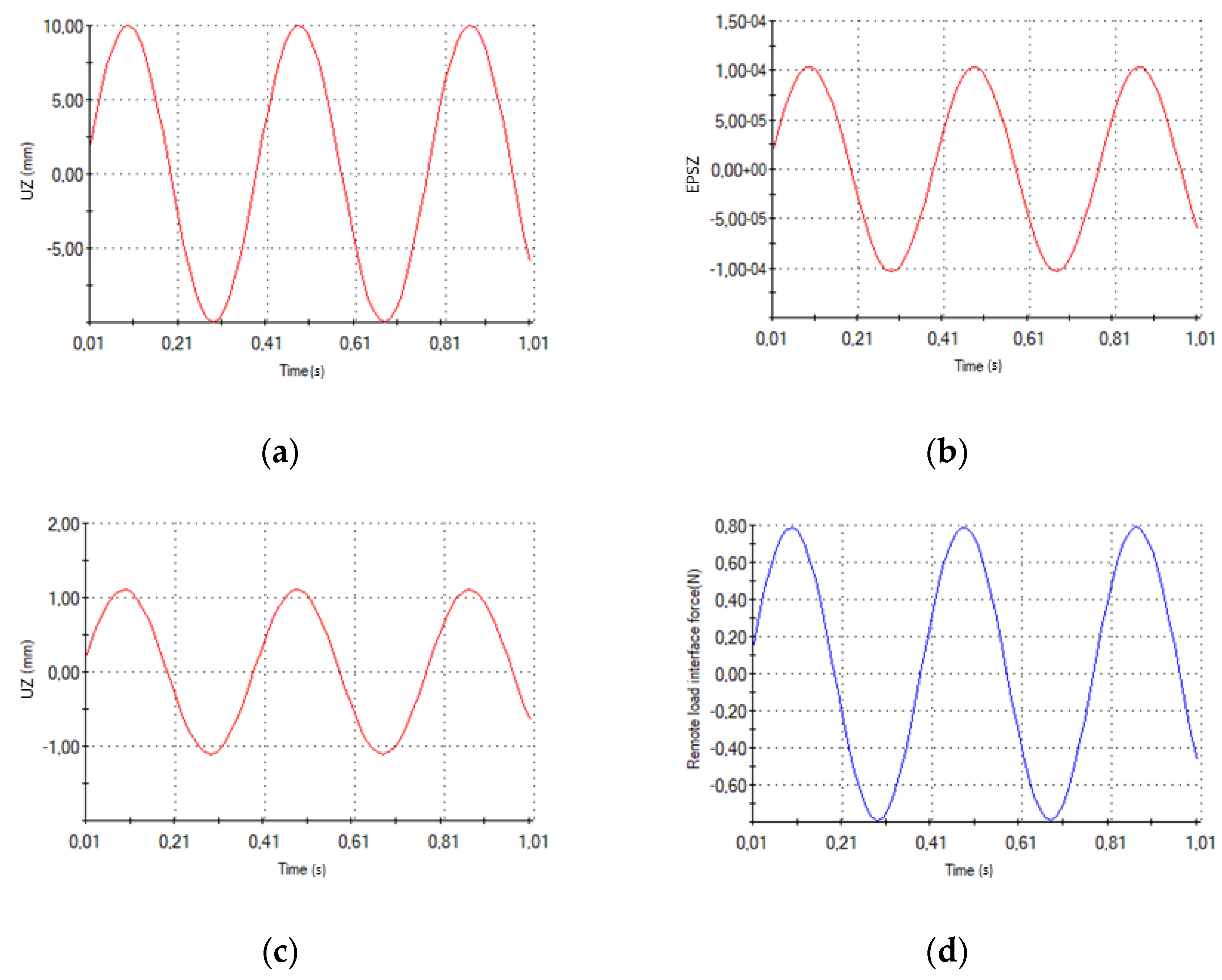
3.2. Numerical Simulation of Piezoelectric Energy Harvester
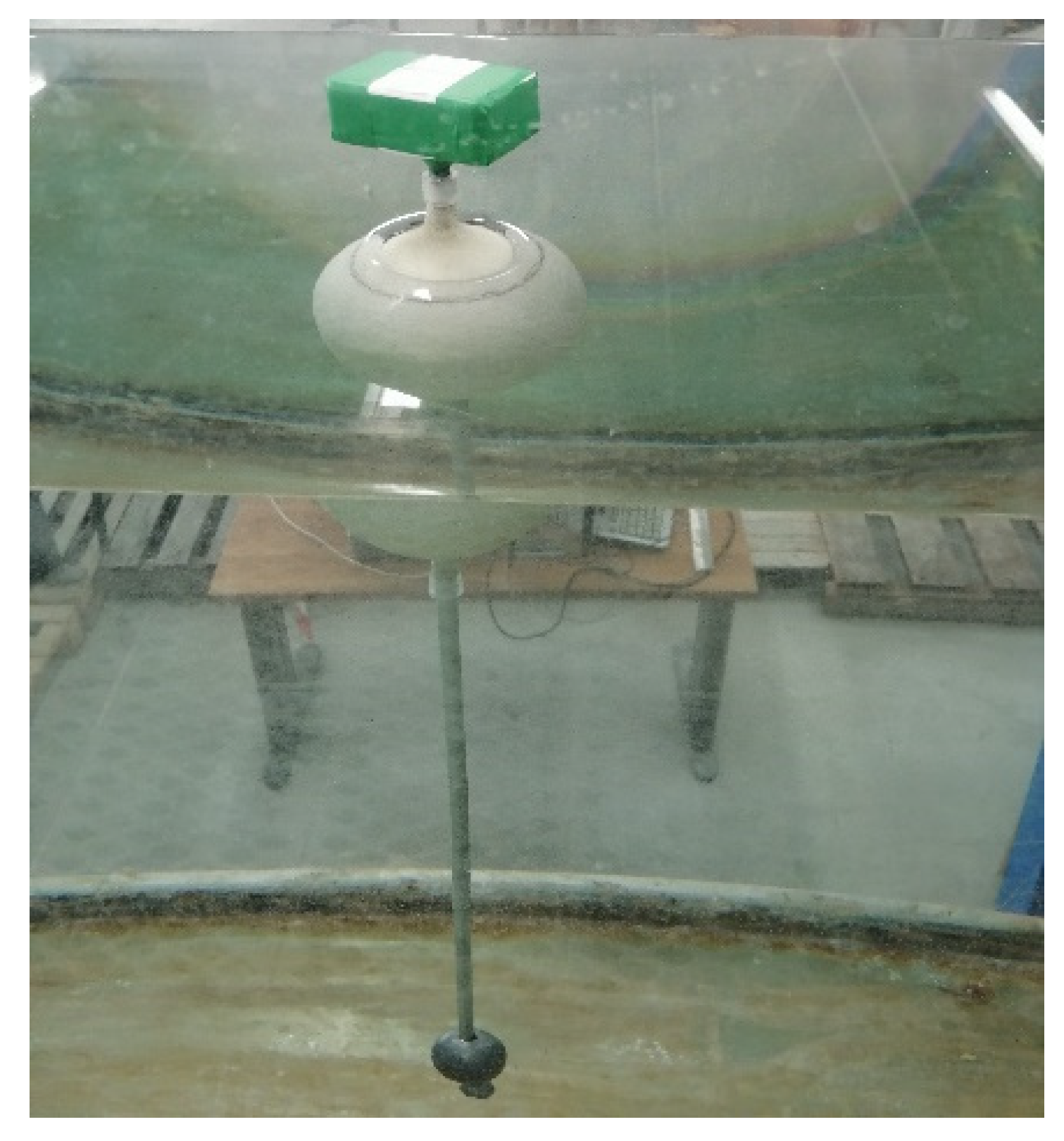
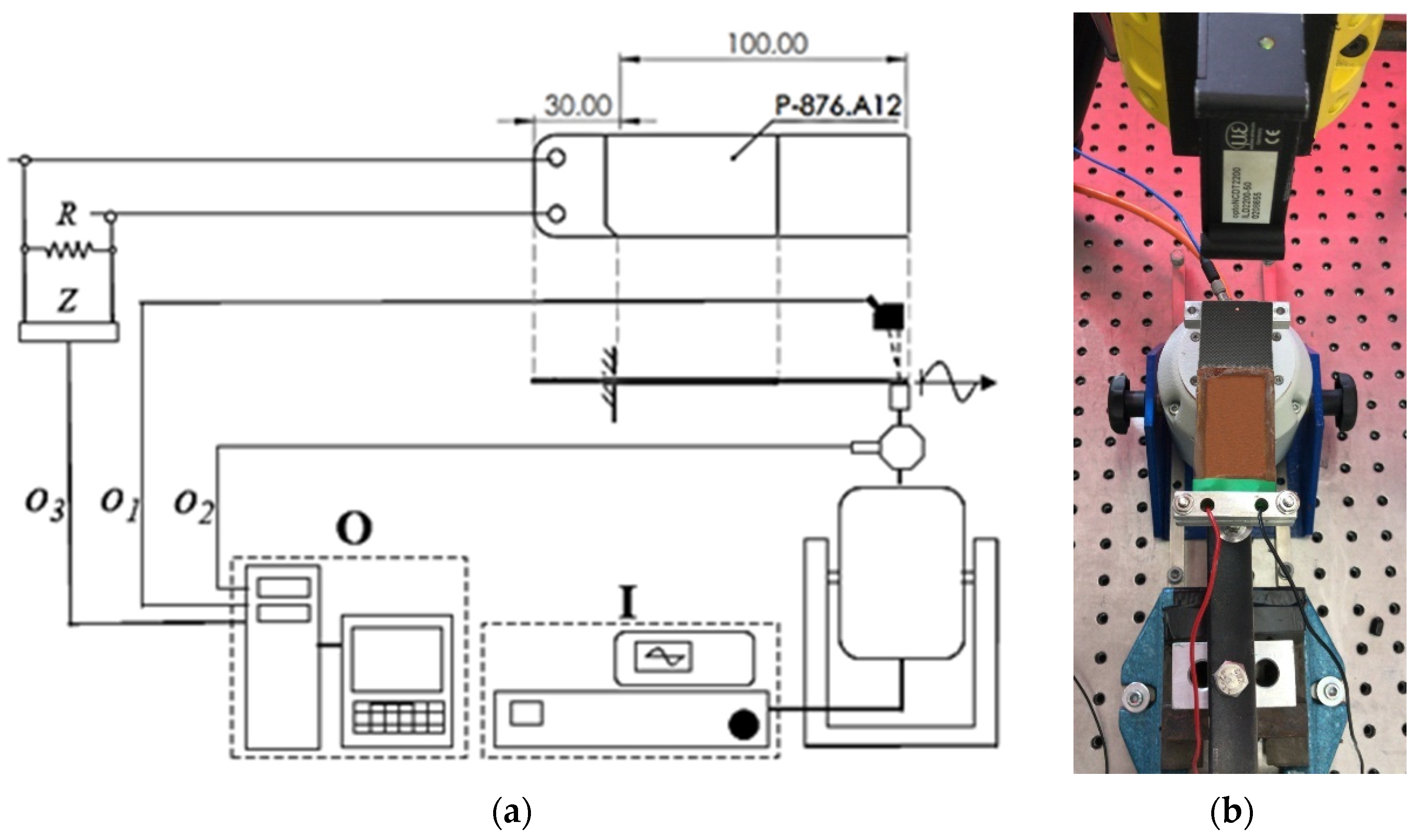
3.3. Experimental Setup
4. Experimental Results
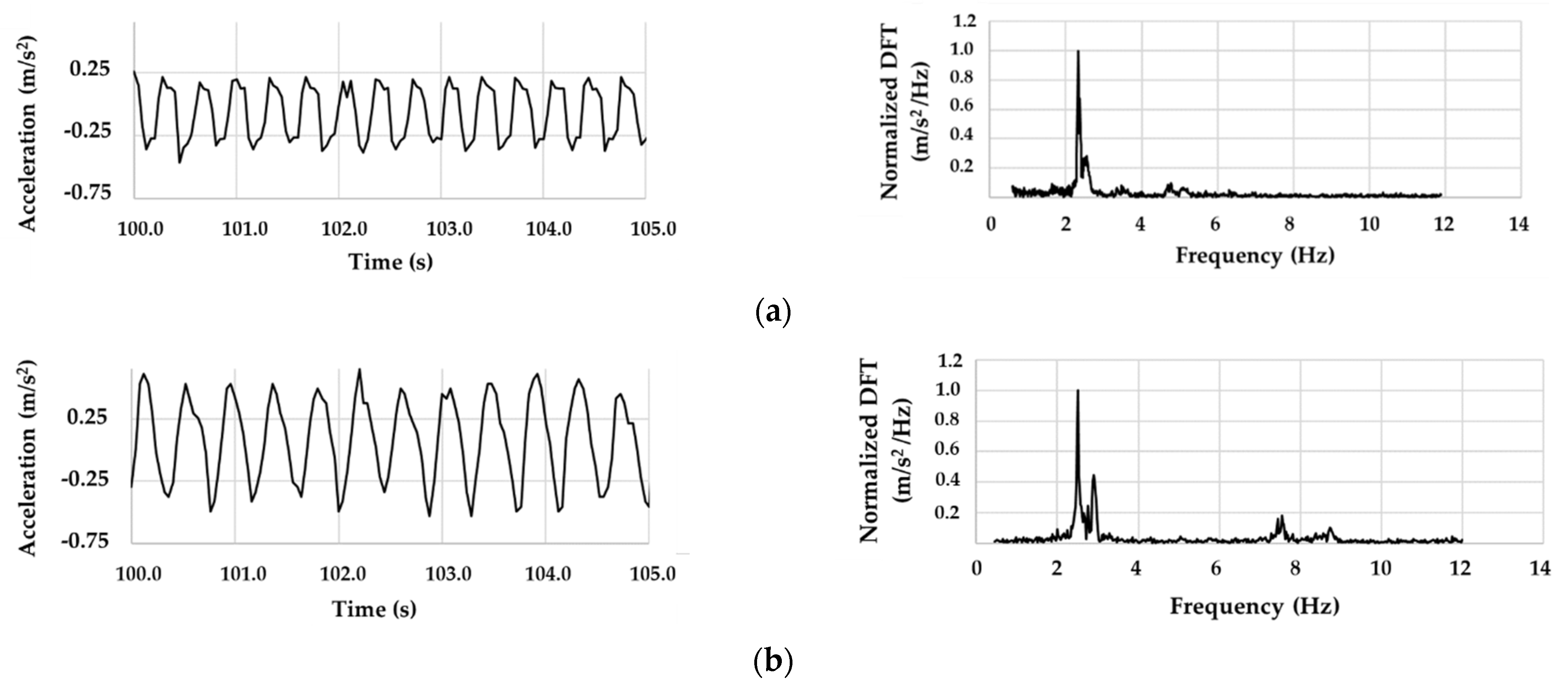
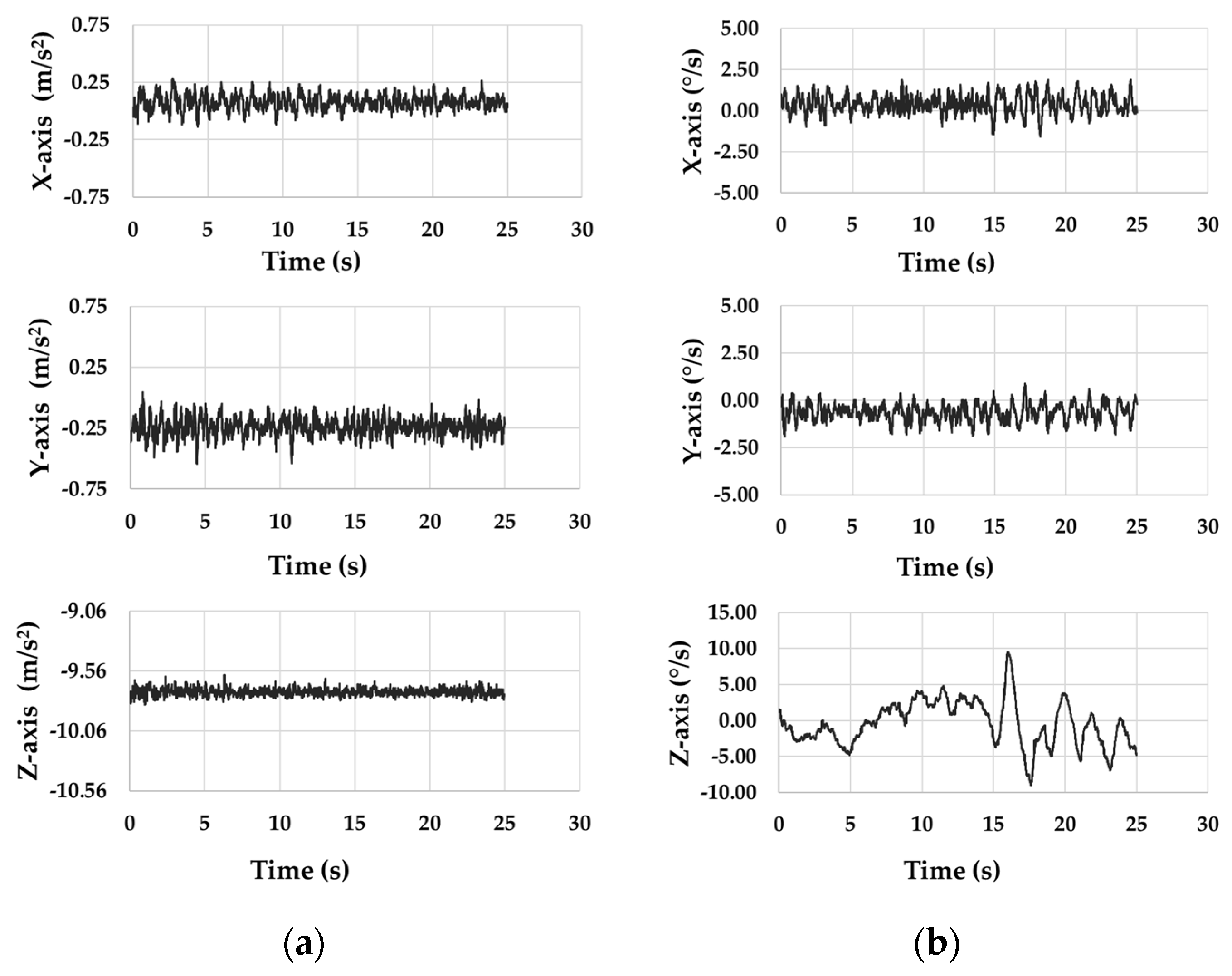
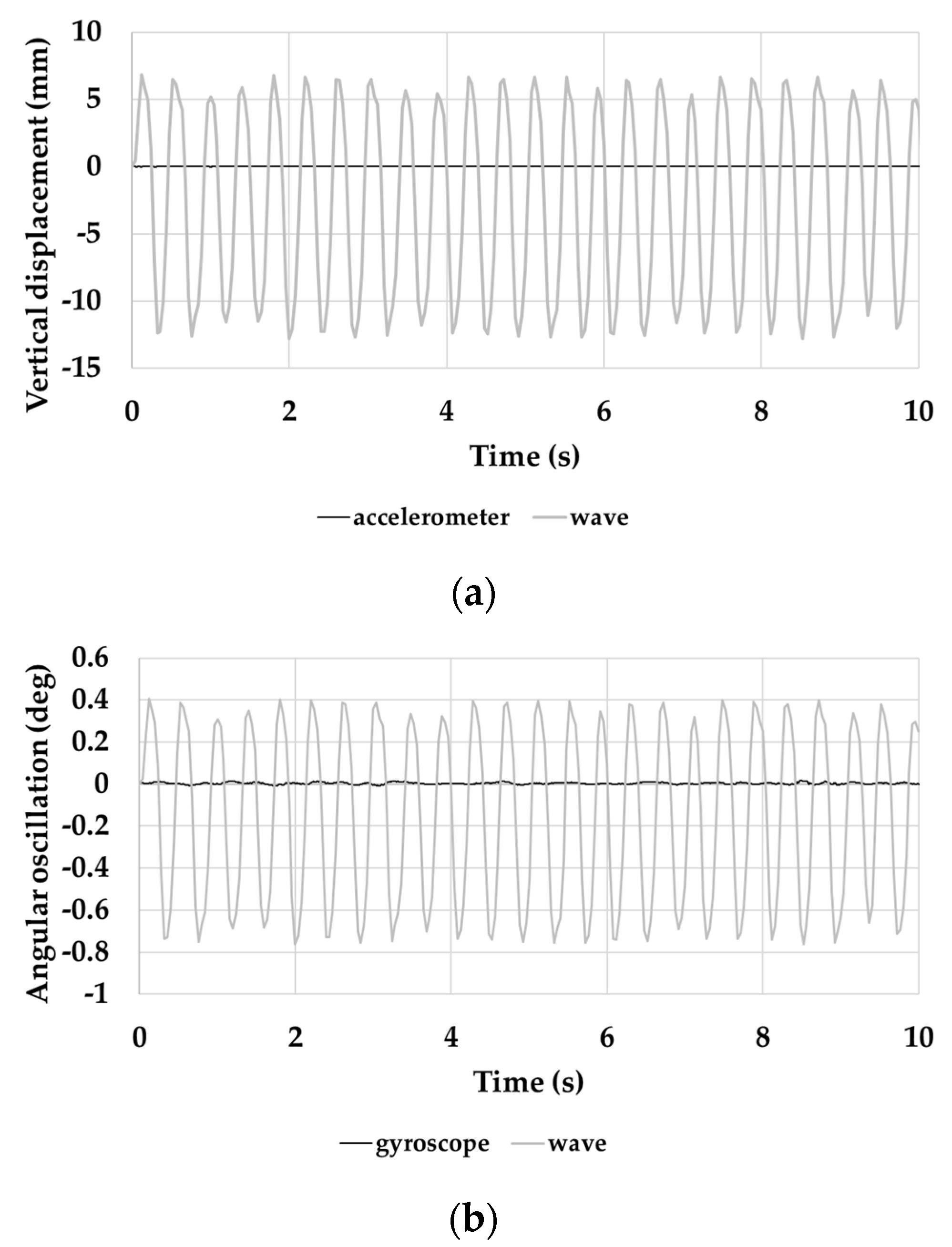
4.1. “Fixed-Point” Conditions
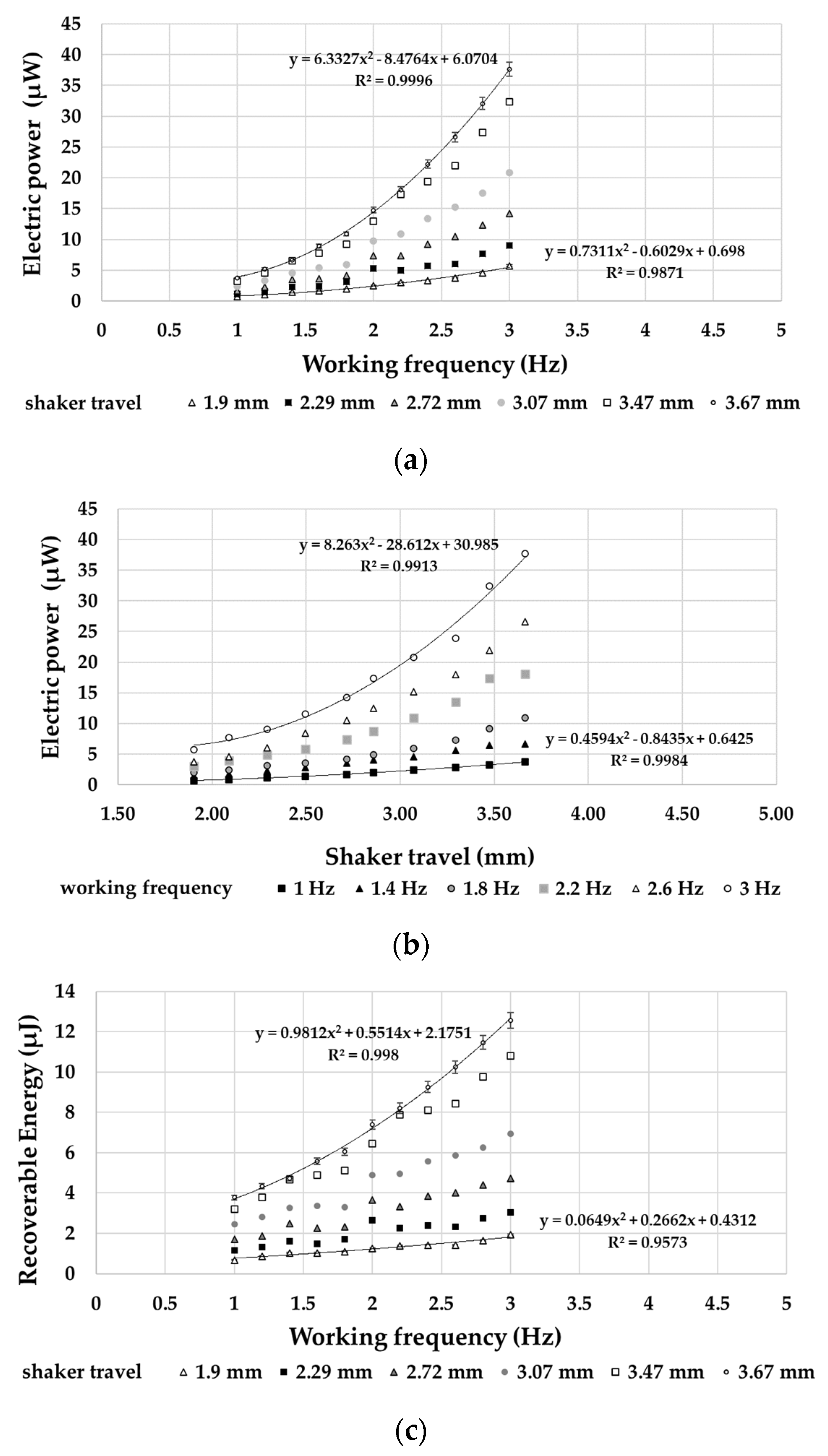
4.2. PPT as Energy Harvester
4.3. Reaction Forces Measurement
5. Data Analysis and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol | Units | Description |
| x | (mm) | forcing excitation function |
| X0 | (mm) | forcing excitation magnitude |
| y | (mm) | response excitation function |
| Y0 | (mm) | response excitation magnitude |
| g | (deg) | angular oscillation |
| m | (kg) | mass |
| b | (mm2/s) | cinematic viscosity |
| βcr | (mm2/s) | critical viscosity |
| k | (N/mm) | stiffness |
| ω | (rad) | pulsation |
| ω0 | (rad) | natural pulsation |
| φ | (rad) | phase of the transfer function |
| λ | pulsation ratio | |
| τ | viscosity ratio | |
| g | (m/s2) | gravity acceleration |
| t | (s) | time |
| T | (s) | wave period |
| f | (Hz) | wave frequency |
| M | (kg) | spar buoy or scale model mass |
| d | (mm) | spar buoy or scale model diameter |
| S | (mm) | buoy sinking |
| He | (mm) | emerged height of the spherical cap |
| L | (mm) | barycentric length between spherical cap and ballast |
| B | (N) | Buoyancy |
| λvert | vertical oscillations pulsations ratio | |
| λang | angular oscillations pulsations ratio | |
| wd | (mm) | wave magnitude |
| I | experimental setup signals generator | |
| O | experimental setup signals acquisition | |
| o1 | linear displacement signal | |
| o2 | load cell signal | |
| o3 | PPT voltage signal | |
| R | (kΩ) | load resistance |
| Z | (MΩ) | load impedance |
| Vpk-pk | (V) | PPT peak-to-peak voltage |
| P | (mW) | harvested electric power |
| E | (mJ) | harvested electric energy |
References
- Albaladejo, C.; Soto, F.; Torres, R.; Sánchez, P.; López, J.A. A Low-Cost Sensor Buoy System for Monitoring Shallow Marine Environments. Sensors 2012, 12, 9613–9634. [Google Scholar] [CrossRef]
- Schirinzi, G.F.; Llorca, M.; Serò, R.; Moyano, E.; Barcelò, D.; Abad, E.; Farrè, M. Trace analysis of polystyrene microplastics in natural water. Chemosphere 2019, 236, 124321. [Google Scholar] [CrossRef] [PubMed]
- Savoca, S.; Capillo, G.; Mancuso, M.; Faggio, C.; Panarello, G.; Crupi, R.; MBonsignore, M.; D’Urso, L.; Compagnini, G.; Neri, F.; et al. Detection of artificial cellulose microfibers in Boops boops from the northern coasts of Sicily (Central Mediterranean). Sci. Total Environ. 2019, 691, 455–465. [Google Scholar] [CrossRef] [PubMed]
- Roset, X.; Trullos, E.; Artero-Delgado, C.; Prat, J.; Del Rio, J.; Massana, I.; Carbonell, M.; Barco de la Torre, G.; Mihai Toma, D. Real-Time Seismic Data from the Bottom Sea. Sensors 2018, 18, 1132. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.Y.; Kim, H.S.; Kong, D.S.; Choi, M.; Kim, H.B.; Lee, J.H.; Murillo, G.; Lee, M.; Jung, J.H. Floating buoy-based triboelectric nanogenerator for an effective vibrational energy harvesting from irregular and random water waves in wild sea. Nano Energy 2018, 45, 247–254. [Google Scholar] [CrossRef]
- Balfour, C.A.; Howarth, M.J.; Smithson, M.J.; Jones, D.S.; Pugh, J. The Use of Ships of Opportunity for Irish Sea Based Oceanographic Measurements. In Proceedings of the IEEE Conference OCEANS, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Chenbing, Z.; Xinpeng, W.; Xiyao, L.; Suoping, Z.; Haitao, W. A small buoy for flux measurement in air-sea boundary layer. In Proceedings of the 13th IEEE International Conference on Electronic Measurement & Instruments (ICEMI 2017), Yangzhou, China, 20–22 October 2017. [Google Scholar] [CrossRef]
- Cella, U.M.; Shuley, N.; Johnstone, R. Wireless Sensor Networks in Coastal Marine Environments: A Study Case Outcome. In Proceedings of the IV International Workshop on UnderWater Networks, Berkeley, CA, USA, 3 November 2009; pp. 1–8. [Google Scholar] [CrossRef]
- Emery, L.R.; Smith McNeal, D.; Hughes, B.; Swick, W.; MacMahan, J. Autonomous Collection of River Parameters Using Drifting Buoys. In Proceedings of the IEEE Conference OCEANS, Seattle, WA, USA, 20–23 September 2010; pp. 1–7. [Google Scholar] [CrossRef]
- Kwok, A.; Martinez, S. Deployment of Drifters in a Piecewise-constant Flow Environment. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 September 2010; pp. 6584–6589. [Google Scholar] [CrossRef]
- Choi, J.K.; Shiraishi, T.; Tanaka, T.; Kondo, H. Safe operation of an autonomous underwater towed vehicle: Towed force monitoring and control. Autom. Constr. 2011, 20, 1012–1019. [Google Scholar] [CrossRef]
- Masmitja, I.; Masmitja, G.; Gonzalez, J.; Shariat-Panahi, S.; Gomariz, S. Development of a control system for an Autonomous Underwater Vehicle. In Proceedings of the 2010 IEEE/OES Autonomous Underwater Vehicles (AUV), Monterey, CA, USA, 1–3 September 2010. [Google Scholar] [CrossRef]
- Duraibabu, D.B.; Poeggel, S.; Omerdic, E.; Capocci, R.; Lewis, E.; Newe, T.; Leen, G.; Toal, D.; Dooly, G. An Optical Fibre Depth (Pressure) Sensor for Remote Operated Vehicles in Underwater Applications. Sensors 2017, 17, 406. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Calmant, S.; Seyler, F.; Cretaux, J.F. Monitoring Continental Surface Waters by Satellite Altimetry. Surv. Geophys. 2009, 25, 247–269. [Google Scholar] [CrossRef]
- Quattrocchi, A.; Freni, F.; Montanini, R. Self-heat generation of embedded piezoceramic patches used for fabrication of smart materials. Sens. Actuator A Phys. 2018, 280, 513–520. [Google Scholar] [CrossRef]
- Sternini, S.; Quattrocchi, A.; Montanini, R. A match coefficient approach for damage imaging in structural components by ultrasonic synthetic aperture focus. Proc. Eng. 2017, 199, 1544–1549. [Google Scholar] [CrossRef]
- Montanini, R.; Quattrocchi, A. Experimental characterization of cantilever-type piezoelectric generator operating at resonance for vibration energy harvesting. AIP Conf. Proc. 2016, 1740, 060003. [Google Scholar] [CrossRef]
- Prandle, D. Operational oceanography—A view ahead. Coast. Eng. 2000, 41, 353–359. [Google Scholar] [CrossRef]
- Alizzio, D.; Bonfanti, M.; Donato, N.; Faraci, C.; Grasso, G.; Lo Savio, F.; Montanini, R.; Quattrocchi, A. Design and verification of a “Fixed-Point” spar buoy scale model for a “Lab on Sea” unit. In Proceedings of the 2020 IMEKO TC-19 International Workshop on Metrology for the Sea IMEKO TC-19 2020, Naples, Italy, 5–7 October 2020; pp. 27–32. [Google Scholar]
- Lin, P.; Li, C.W. Wave–current interaction with a vertical square. Ocean Eng. 2003, 20, 855–876. [Google Scholar] [CrossRef]
- Sahin, B.; Adil Ozturk, N.; Akilli, H. Horseshoe vortex system in the vicinity of the vertical cylinder mounted on a flat plate. Flow Meas. Instrum. 2007, 18, 57–68. [Google Scholar] [CrossRef]
- McCormick, M.E. Ocean Engineering Mechanics: With Applications; Cambridge University: Cambridge, UK, 2010; ISBN 978-0-521-85952-3. [Google Scholar]
- Diana, G.; Cheli, F. Dinamica dei Sistemi Meccanici; Polipress: Krakow, Poland, 2010; Volume 1, pp. 146–157. ISBN 8873980651. [Google Scholar]
- Alizzio, D.; Lo Savio, F.; Grasso, G.M.; Bonfanti, M. Proposal of a water shallow tank for long and capillary-gravity waves based on a numerical simulation. In Proceedings of the CEUR Workshop 2020, Online, 9 July 2020; Volume 2768, pp. 66–71. [Google Scholar]
- Lo Savio, F.; Bonfanti, M. A novel device for measuring the ultrasonic wave velocity and the thickness of hyperelastic materials under quasi-static deformations. Polym. Test. 2019, 74, 235–244. [Google Scholar] [CrossRef]
- Ma, W.; Eric Ross, L. Strain-gradient-induced electric polarization in lead zirconate titanate ceramics. Appl. Phys. Lett. 2003, 82, 3293–3295. [Google Scholar] [CrossRef]
- Quattrocchi, A.; Freni, F.; Montanini, R. Power Conversion Efficiency of Cantilever-Type Vibration Energy Harvesters Based on Piezoceramic Films. IEEE Trans. Instrum. Meas. 2020, 70, 1500109. [Google Scholar] [CrossRef]
- Ramadass, Y.K.; Chandrakasan, A.P. An efficient piezoelectric energy harvesting interface circuit using a bias-flip rectifier and shared inductor. IEEE J. Solid-State Circuits 2009, 45, 189–204. [Google Scholar] [CrossRef]
- De Caro, S.; Montanini, R.; Panarello, S.; Quattrocchi, A.; Scimone, T.; Testa, A. A PZT-based energy harvester with working point optimization. In Proceedings of the 6th International Conference on Clean Electrical Power (ICCEP 2020), Santa Margherita Ligure, Italy, 27–29 June 2020; pp. 699–704. [Google Scholar] [CrossRef]
- Quattrocchi, A.; Montanini, R.; De Caro, S.; Panarello, S.; Scimone, T.; Foti, S.; Testa, A. A New Approach for Impedance Tracking of Piezoelectric Vibration Energy Harvesters Based on a Zeta Converter. Sensors 2020, 20, 5862. [Google Scholar] [CrossRef]
- Lu, C.; Tsui, C.Y.; Ki, W.H. Vibration Energy Scavenging System with Maximum Power Tracking for Micropower Applications. IEEE Trans. Very Large Scale Integr. VLSI Syst. 2011, 19, 2109–2119. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| d | S | B | He | M | L | λvert | λang |
|---|---|---|---|---|---|---|---|
| (mm) | (mm) | (N) | (mm) | (kg) | (mm) | ||
| 600 | 500 | 1052.5 | 100 | 57.5 | 2000 | 10.62 | 5.67 |
| d | S | B | He | M | L | λvert | λang |
|---|---|---|---|---|---|---|---|
| (mm) | (mm) | (N) | (mm) | (kg) | (mm) | ||
| 100 | 86 | 3.98 | 14 | 0.45 | 370 | 12.73 | 14.69 |
| FEA Specifications | Measure Unit | Carbon Fiber (band) | Kapton (PPT) | Epoxy Resin (ribs) |
|---|---|---|---|---|
| Elastic modulus | (GPa) | 70 | 2.07 | 2.415 |
| Poisson ratio | 0.3 | 0.39 | 0.35 | |
| Effective Length | (mm) | 350 | ||
| Width | (mm) | 35 | ||
| Thickness | (mm) | 1 | ||
| Solid Mesh Nodes | 18,746 | |||
| Solid Mesh Elements | 8556 | |||
| Maximum Element size | (mm) | 4.546 | ||
| Tolerance | (mm) | 0.2273 | ||
| Percentage of elements with Aspect Ratio < 3 | (%) | 0.409 | ||
| Percentage of elements with Aspect Ratio > 10 | (%) | 23.9 | ||
| Maximum Aspect Ratio | 34.565 | |||
| Maximum Jacobian | 10.18 | |||
| Contacts between parts | bonded | |||
| Boundary Conditions: | ||||
| Maximum Remote Displacement | (mm) | 10 (at 350 mm from fixed joint) | ||
| Simulation Time Duration | (s) | 1 | ||
| Fixed Time Step | (s) | 0.04 | ||
| Max | Min | Mean Value | St. Deviation | |
|---|---|---|---|---|
| (m/s2) | (m/s2) | (m/s2) | (m/s2) | |
| X-axis | 0.28449 | −0.13734 | 0.07633 | 0.065729 |
| Y-axis | 0.04905 | −0.53955 | −0.2377 | 0.075556 |
| Z-axis | −9.59418 | −9.83943 | −9.73372 | 0.029311 |
| Max | Min | Mean Value | St. Deviation | |
|---|---|---|---|---|
| (°/s) | (°/s) | (°/s) | (°/s) | |
| X-axis | 1.9 | −1.6 | 0.401346 | 0.569683 |
| Y-axis | 0.9 | −1.9 | −0.62611 | 0.472373 |
| Z-axis | 9.5 | −9.0 | −0.3975 | 3.103408 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alizzio, D.; Bonfanti, M.; Donato, N.; Faraci, C.; Grasso, G.M.; Lo Savio, F.; Montanini, R.; Quattrocchi, A. Design and Performance Evaluation of a “Fixed-Point” Spar Buoy Equipped with a Piezoelectric Energy Harvesting Unit for Floating Near-Shore Applications. Sensors 2021, 21, 1912. https://doi.org/10.3390/s21051912
Alizzio D, Bonfanti M, Donato N, Faraci C, Grasso GM, Lo Savio F, Montanini R, Quattrocchi A. Design and Performance Evaluation of a “Fixed-Point” Spar Buoy Equipped with a Piezoelectric Energy Harvesting Unit for Floating Near-Shore Applications. Sensors. 2021; 21(5):1912. https://doi.org/10.3390/s21051912
Chicago/Turabian StyleAlizzio, Damiano, Marco Bonfanti, Nicola Donato, Carla Faraci, Giovanni Maria Grasso, Fabio Lo Savio, Roberto Montanini, and Antonino Quattrocchi. 2021. "Design and Performance Evaluation of a “Fixed-Point” Spar Buoy Equipped with a Piezoelectric Energy Harvesting Unit for Floating Near-Shore Applications" Sensors 21, no. 5: 1912. https://doi.org/10.3390/s21051912
APA StyleAlizzio, D., Bonfanti, M., Donato, N., Faraci, C., Grasso, G. M., Lo Savio, F., Montanini, R., & Quattrocchi, A. (2021). Design and Performance Evaluation of a “Fixed-Point” Spar Buoy Equipped with a Piezoelectric Energy Harvesting Unit for Floating Near-Shore Applications. Sensors, 21(5), 1912. https://doi.org/10.3390/s21051912