
Minimum Length Scheduling for Multi-Cell Full Duplex Wireless Powered Communication Networks


Abstract
:1. Introduction
1.1. Related Works
1.2. Contributions
- We propose an optimization framework for the minimization of the schedule length in a full-duplex multi-cell WPCN for the first time in the literature. The framework considers the concurrent transmissions of the users, and incorporates the non-linear energy harvesting model for a full-duplex WPCN, in which the HAPs and users both operate in full-duplex mode.
- We formulate a mixed-integer non-linear optimization problem to minimize the schedule length. The formulated optimization problem is non-convex and generally hard to solve for the global optimal solution. As a solution strategy, we perform decomposition of the optimization problem into the power control problem and scheduling problem.
- For the power control problem, we propose an optimal polynomial time algorithm based on the evaluation of the Perron–Frobenius conditions.
- For the scheduling problem, we propose a heuristic algorithm based on the maximization of the number of concurrently transmitting users within a transmission slot by maximizing the allowable interference on each user without violating their signal-to-noise-ratio (SNR) requirements.
1.3. Organization of the Paper
2. System Model and Assumptions
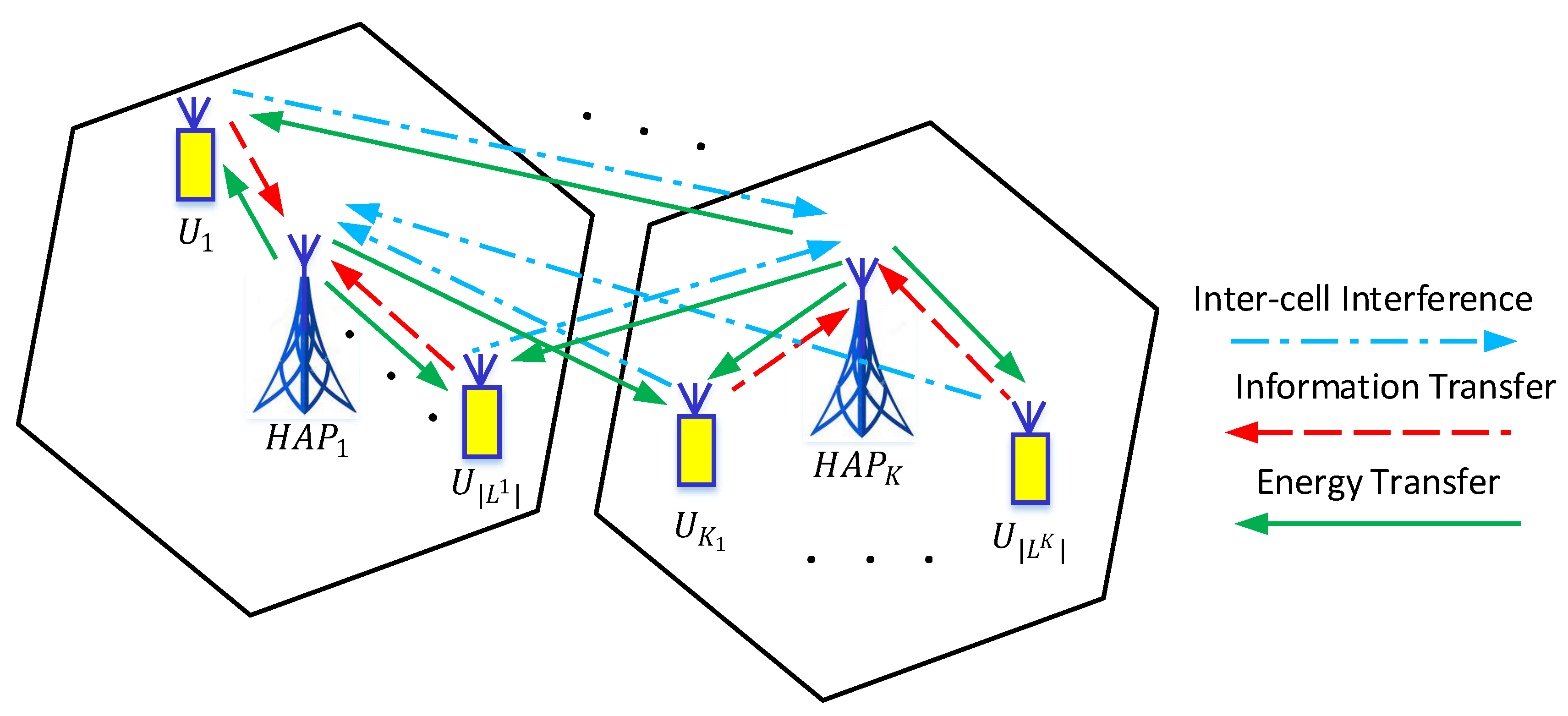
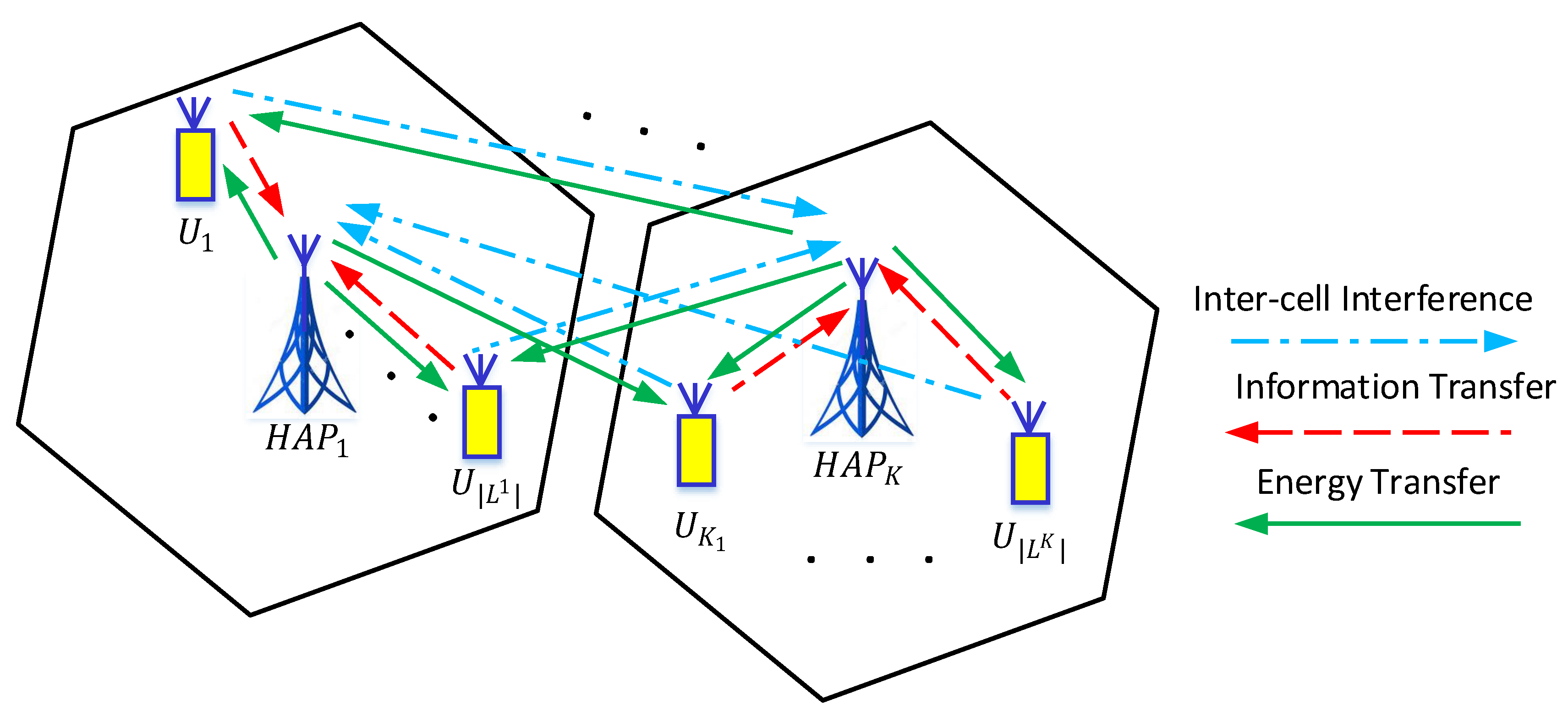
- We consider a multi-cell WPCN, which consists of K HAPs and N users denoted by as shown in Figure 1. All the HAPs and users are equipped with a full-duplex antenna. The HAPs are connected to a stable power line and transmit at a constant power continuously. On the other hand, users do not have any external power supply and can only harvest energy from the HAPs. The harvested energy is stored in a rechargeable battery with initial level for user n, where , and capacity . The users can harvest energy from all the HAPs but only transmit information to a single HAP to which they are connected to. The set of users connected to HAP k is denoted by for such that . The important symbols used in this paper and their definitions are given in Table 1.
- We consider the time division multiple access (TDMA) protocol within each cell for the uplink information transmission. The TDMA is more power efficient since it allows the users to keep their transmitter circuitry inactive until their particular allocated time slot. One of the HAP works as the central HAP, i.e., central gateway and network manager in WirelessHART or system manager in International Society of Automation (ISA) 100.11a [31]. During the initialization phase, all the HAPs collect the channel state information (CSI) from the users and share it with the central HAP. The central HAP then runs the algorithm and shares the resulting resource allocation, scheduling decisions, and synchronization information by using a beacon transmitted to all the HAPs.Since the focus of this study is to design a resource allocation and scheduling algorithm, the mechanisms for synchronization are out of scope of this paper and can be found in [32]. The total time in which the system remains operational is partitioned into frames, and each frame is further divided into M variable length non-overlapping time slots. In each time slot, a subset of users from different cells transmits their information simultaneously to their respective HAP. No intra-cell interference exists except the self interference at the HAP due to full duplex operational mode. However, simultaneous transmitting users from different cells may create interference to each other.
- The uplink information transmission and downlink energy transfer channels are assumed to be different. The uplink channel gain from user n to HAP k is denoted by , and the downlink channel gain from HAP k to user n is denoted by . We assume that all the channels are quasi-static, i.e., the channel gains remain the same in the current frame and can vary independently in the next frame [12,33,34,35]. We further assume that the channel state information is perfectly known at the HAP [8,35,36].
- We assume that user n has a traffic demand bits to be transmitted in each frame.
- We assume that each user allocated to the transmission slot m transmits information at constant rate r if the SNR of user n is above a fixed threshold aswhere is the transmit power of user n, W is the channel bandwidth, is the noise density, represents the interference created by the energy radiation by the HAPs including self-interference and interference from the other HAPs, and the term is the interference at the HAP to which user n is connected from other users that are concurrently transmitting information in slot m.
- We consider a realistic non-linear energy harvesting model [37], in which the energy harvesting rate for user n iswhere is a constant to guarantee zero-input zero-output response; is the maximum harvested power during saturation; and is the logistic function related to user n. a and b are the positive constants related to the non-linear charging rate with respect to the input power and turn-on threshold, respectively. For a given energy harvesting circuit, the parameters , a and b are determined by curve fitting.
- We assume that the users can harvest energy from all the HAPs, and the total power received by user n is given as follows:
3. Minimum Length Scheduling Problem Formulation
Solution Framework
- For a given set of concurrently transmitting users, we formulate the optimization problem to determine the minimum transmission slot length and the corresponding transmit power vector while considering the maximum transmit power constraint, traffic demand, and energy causality of the users. We first show that the power control problem is a feasibility problem, and then, by using the Perron–Frobenius condition, we find the optimal power vector if the problem is feasible.
- Determining the power vector and transmission slot length for a given set of users reduces the problem to the optimization of the concurrently transmitting users within a transmission slot. For the scheduling problem, we exploit the affordable interference levels of all the users and group them based on these interference levels while considering the maximum transmit power and energy causality of the users.
4. Power Control Problem
5. Scheduling
| Algorithm 1 Constant Rate Scheduling Algorithm (CRSA) |
Input: A set of users |
Output: Simultaneously transmitting user set in each slot , transmission time for each |
slot , transmit power vector |
| 1: , , , , |
| 2: determine , for all |
| 3: while |
| 4: |
| 5: if |
| 6: |
| 7: end if |
| 8: for |
| 9: if |
| 10: |
| 11: |
| 12: |
| 13: 2: |
| 14: end if |
| 15: end for |
| 16: evaluate interference of user n to s, for all |
| 17: |
| 18: , for all |
| 19: |
| 20: for |
| 21: if |
| 22: |
| 23: sort in descending order of |
| 24: for |
| 25: if |
| 26: if |
| 27: |
| 28: |
| 29: |
| 30: break, |
| 31: end if |
| 32: else |
| 33: break, |
| 34: end if |
| 35: end for |
| 36: end if |
| 37: end for |
| 38: |
| 39: |
| 40: |
| 41: |
| 42: end while |
6. Simulation Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jejdling, F. The Ericsson Mobility Report; Ericsson: Stockholm, Sweden, 2020. [Google Scholar]
- Blanckenstein, J.; Klaue, J.; Karl, H. A Survey of Low-Power Transceivers and Their Applications. IEEE Circuits Syst. Mag. 2015, 15, 6–17. [Google Scholar] [CrossRef]
- Iqbal, M.S.; Sadi, Y.; Coleri, S. Minimum Length Scheduling for Discrete-Rate Full-Duplex Wireless Powered Communication Networks. IEEE Trans. Wirel. Commun. 2021, 1. [Google Scholar] [CrossRef]
- Zhou, X.; Zhang, R.; Ho, C.K. Wireless Information and Power Transfer: Architecture Design and Rate-Energy Tradeoff. IEEE Trans. Commun. 2013, 61, 4754–4767. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Zhang, R.; Chua, K.C. Wireless Information and Power Transfer: A Dynamic Power Splitting Approach. IEEE Trans. Commun. 2013, 61, 3990–4001. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Jiang, Y.; Gao, Y.; Sang, L.; Yang, D. On Buffer-Constrained Throughput of a Wireless-Powered Communication System. IEEE J. Sel. Areas Commun. 2019, 37, 283–297. [Google Scholar] [CrossRef] [Green Version]
- Gupta, A.; Singh, K.; Sellathurai, M. Time-Switching EH-Based Joint Relay Selection and Resource Allocation Algorithms for Multi-User Multi-Carrier AF Relay Networks. IEEE Trans. Green Commun. Netw. 2019, 3, 505–522. [Google Scholar] [CrossRef]
- Ju, H.; Zhang, R. Throughput Maximization in Wireless Powered Communication Networks. IEEE Trans. Wirel. Commun. 2014, 13, 418–428. [Google Scholar] [CrossRef] [Green Version]
- Guo, C.; Liao, B.; Huang, L. Time Allocation and Load Balancing in Multi-Cell Wireless Powered Communication Networks. IEEE Access 2016, 4, 7795–7805. [Google Scholar] [CrossRef]
- Kwan, J.C.; Fapojuwo, A.O. Radio Frequency Energy Harvesting and Data Rate Optimization in Wireless Information and Power Transfer Sensor Networks. IEEE Sensors J. 2017, 17, 4862–4874. [Google Scholar] [CrossRef]
- Shen, S.; Qian, J.; Cheng, D.; Yang, K.; Zhang, G. A Sum-Utility Maximization Approach for Fairness Resource Allocation in Wireless Powered Body Area Networks. IEEE Access 2019, 7, 20014–20022. [Google Scholar] [CrossRef]
- He, C.; Liang, J.; Qian, G.; Guo, C.; Feng, D. Optimal Time Allocation in Multi-Cell Wireless Powered Communication Networks. IEEE Access 2019, 7, 26519–26526. [Google Scholar] [CrossRef]
- Kwan, J.C.; Fapojuwo, A.O. Performance Optimization of a Multi-Source, Multi-Sensor Beamforming Wireless Powered Communication Network With Backscatter. IEEE Sensors J. 2019, 19, 10898–10909. [Google Scholar] [CrossRef]
- Salik, E.D.; Gurur Onalan, A.; Coleri, S. Minimum Length Scheduling for Multi-Cell Wireless Powered Communication Networks. In Proceedings of the 2020 IEEE 31st Annual International Symposium on Personal, Indoor and Mobile Radio Communications, London, UK, 31 August–3 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Sabharwal, A.; Schniter, P.; Guo, D.; Bliss, D.W.; Rangarajan, S.; Wichman, R. In-band Full-duplex Wireless: Challenges and Opportunities. IEEE J. Sel. Areas Commun. 2014, 32, 1637–1652. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Yu, F.R.; Ji, H.; Leung, V.C.M.; Li, X. In-band Full-duplex Relaying: A survey, Research Issues and Challenges. IEEE Commun. Surv. Tutor. 2015, 17, 500–524. [Google Scholar] [CrossRef]
- Sultan, R.; Seddik, K.G.; Han, Z.; Aazhang, B. Joint Transmitter-Receiver Optimization and Self-Interference Suppression in Full-Duplex MIMO Systems. IEEE Trans. Veh. Technol. 2021, 70, 6913–6929. [Google Scholar] [CrossRef]
- Singh, K.; Wang, K.; Biswas, S.; Ding, Z.; Khan, F.A.; Ratnarajah, T. Resource Optimization in Full Duplex Non-Orthogonal Multiple Access Systems. IEEE Trans. Wirel. Commun. 2019, 18, 4312–4325. [Google Scholar] [CrossRef] [Green Version]
- Bharadia, D.; McMilin, E.; Katti, S. Full Duplex Radios. ACM SIGCOMM Comput. Commun. Rev. 2013, 43, 375–386. [Google Scholar] [CrossRef]
- Duarte, M.; Sabharwal, A. Full-duplex Wireless Communications using Off-the-shelf Radios: Feasibility and First Results. In Proceedings of the Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 7–10 November 2010; pp. 1558–1562. [Google Scholar]
- Amjad, M.S.; Nawaz, H.; Ozsoy, K.; Gurbuz, O.; Tekin, I. A Low-Complexity Full-Duplex Radio Implementation With a Single Antenna. IEEE Trans. Veh. Technol. 2018, 67, 2206–2218. [Google Scholar] [CrossRef]
- Korpi, D.; Tamminen, J.; Turunen, M.; Huusari, T.; Choi, Y.S.; Anttila, L.; Talwar, S.; Valkama, M. Full-duplex mobile device: Pushing the limits. IEEE Commun. Mag. 2016, 54, 80–87. [Google Scholar] [CrossRef] [Green Version]
- Shao, C.; Roh, H.; Kim, T.; Lee, W. Multisource wireless energy harvesting-based medium access control for rechargeable sensors. IEEE Trans. Consum. Electron. 2016, 62, 119–127. [Google Scholar] [CrossRef]
- Iqbal, M.S.; Sadi, Y.; Coleri, S. Minimum Length Scheduling for Full Duplex Time-Critical Wireless Powered Communication Networks. IEEE Trans. Wirel. Commun. 2020, 19, 5993–6006. [Google Scholar] [CrossRef]
- Iqbal, M.S.; Sadi, Y.; Coleri, S. Throughput Maximization for Full Duplex Wireless Powered Communication Networks. In Proceedings of the IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Morsi, R.; Michalopoulos, D.S.; Schober, R. Performance Analysis of Near-Optimal Energy Buffer Aided Wireless Powered Communication. IEEE Trans. Wirel. Commun. 2018, 17, 863–881. [Google Scholar] [CrossRef] [Green Version]
- Morsi, R.; Michalopoulos, D.S.; Schober, R. On-off transmission policy for wireless powered communication with energy storage. In Proceedings of the 2014 48th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 2–5 November 2014; pp. 1676–1682. [Google Scholar]
- Iqbal, M.S.; Sadi, Y.; Coleri, S. Optimal On-Off Transmission Schemes for Full Duplex Wireless Powered Communication Networks. In Proceedings of the IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom), Odessa, Ukraine, 26–29 May 2020; pp. 1–6. [Google Scholar]
- Iqbal, M.S.; Sadi, Y.; Coleri Ergen, S. Minimum Length Scheduling for Discrete Rate Based Full Duplex Wireless Powered Communication Networks. In Ad-Hoc, Mobile, and Wireless Networks; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 343–354. [Google Scholar]
- Iqbal, M.S.; Sadi, Y.; Coleri, S. Throughput maximization in Discrete Rate Based Full Duplex Wireless Powered Communication Networks. Internet Technol. Lett. 2020, 4, e206. [Google Scholar] [CrossRef]
- HART Communication Foundation. HART Communication Application Guide; HART Communication Foundation: Austin, TX, USA, 2013. [Google Scholar]
- Coleri Ergen, S.; Varaiya, P. PEDAMACS: Power efficient and delay aware medium access protocol for sensor networks. IEEE Trans. Mob. Comput. 2006, 5, 920–930. [Google Scholar] [CrossRef]
- Xu, J.; Liu, L.; Zhang, R. Multiuser MISO Beamforming for Simultaneous Wireless Information and Power Transfer. IEEE Trans. Signal Process. 2014, 62, 4798–4810. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Li, Y.; Rebelatto, J.L.; Uchoa-Filho, B.F.; Vucetic, B. Harvest-then-cooperate: Wireless-powered Cooperative Communications. IEEE Trans. Signal Process. 2015, 63, 1700–1711. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Tao, M.; Ng, D.W.K.; Chen, W.; Schober, R. Energy-Efficient Resource Allocation for Wireless Powered Communication Networks. IEEE Trans. Wirel. Commun. 2016, 15, 2312–2327. [Google Scholar] [CrossRef] [Green Version]
- Kang, X.; Ho, C.K.; Sun, S. Full-Duplex Wireless-Powered Communication Network With Energy Causality. IEEE Trans. Wirel. Commun. 2015, 14, 5539–5551. [Google Scholar] [CrossRef] [Green Version]
- Boshkovska, E.; Ng, D.W.K.; Zlatanov, N.; Schober, R. Practical Non-Linear Energy Harvesting Model and Resource Allocation for SWIPT Systems. IEEE Commun. Lett. 2015, 19, 2082–2085. [Google Scholar] [CrossRef] [Green Version]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: New York, NY, USA, 2004. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| N | Total number of users |
| K | Total number of HAPs |
| M | Total number of time slots |
| Uplink channel gain from user n to HAP k | |
| Downlink channel gain from HAP k to user n | |
| The length of transmission slot m | |
| Transmission rate of user n in slot m | |
| Time slot allocation variable | |
| Data requirement of user n | |
| Transmission rate of user i | |
| Signal-to-noise ratio threshold for user n | |
| Transmit power of HAP | |
| Power of Self-interference at HAP | |
| Transmit power of user n | |
| Interference of user i on HAP j | |
| Maximum transmit power of a user | |
| Energy harvesting rate of user n | |
| Initial battery level of user n | |
| Maximum allowed interference level for user n | |
| Set of concurrently transmitting users | |
| W | Bandwidth |
| Noise density | |
| Total received power by user n | |
| Energy of user n | |
| Path loss exponent |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iqbal, M.S.; Sadi, Y.; Coleri, S. Minimum Length Scheduling for Multi-Cell Full Duplex Wireless Powered Communication Networks. Sensors 2021, 21, 6599. https://doi.org/10.3390/s21196599
Iqbal MS, Sadi Y, Coleri S. Minimum Length Scheduling for Multi-Cell Full Duplex Wireless Powered Communication Networks. Sensors. 2021; 21(19):6599. https://doi.org/10.3390/s21196599
Chicago/Turabian StyleIqbal, Muhammad Shahid, Yalcin Sadi, and Sinem Coleri. 2021. "Minimum Length Scheduling for Multi-Cell Full Duplex Wireless Powered Communication Networks" Sensors 21, no. 19: 6599. https://doi.org/10.3390/s21196599
APA StyleIqbal, M. S., Sadi, Y., & Coleri, S. (2021). Minimum Length Scheduling for Multi-Cell Full Duplex Wireless Powered Communication Networks. Sensors, 21(19), 6599. https://doi.org/10.3390/s21196599