
Real-Time and Offline Evaluation of Myoelectric Pattern Recognition for the Decoding of Hand Movements

 ,
,  and
and 
Abstract
:1. Introduction
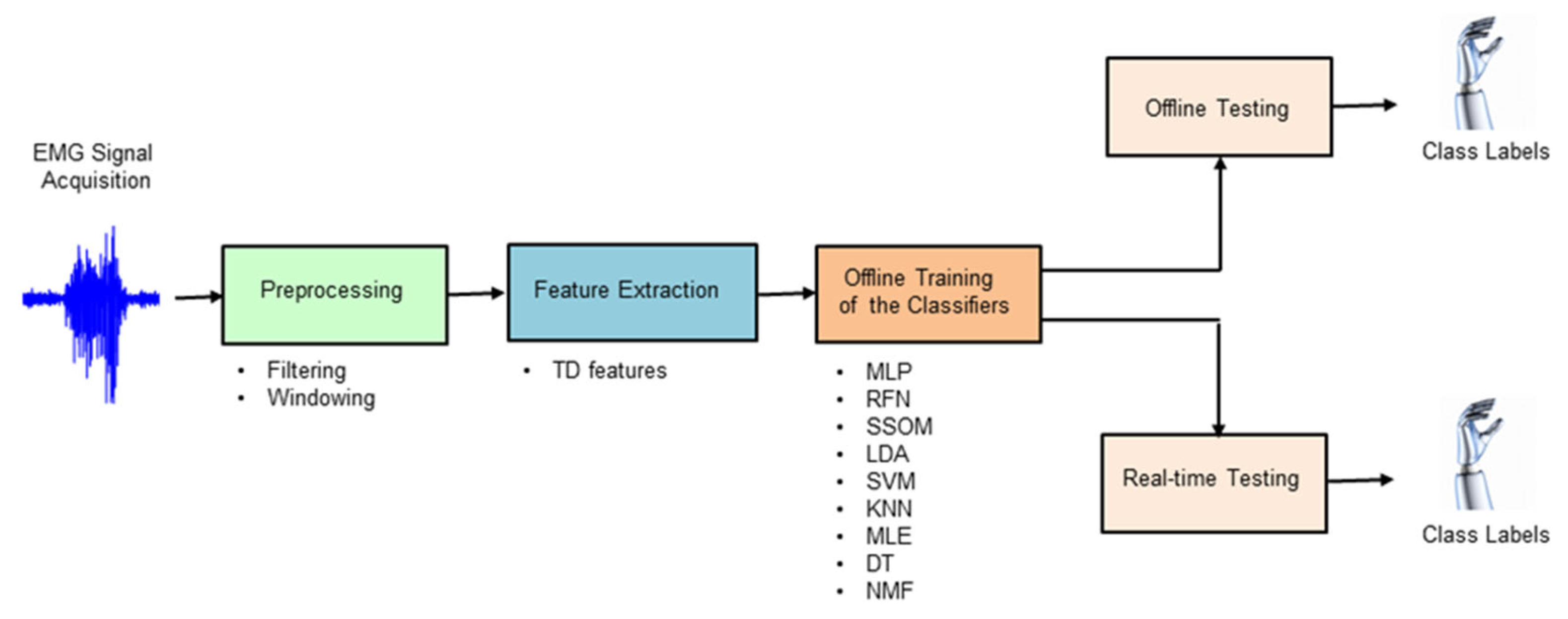
2. Materials and Methods
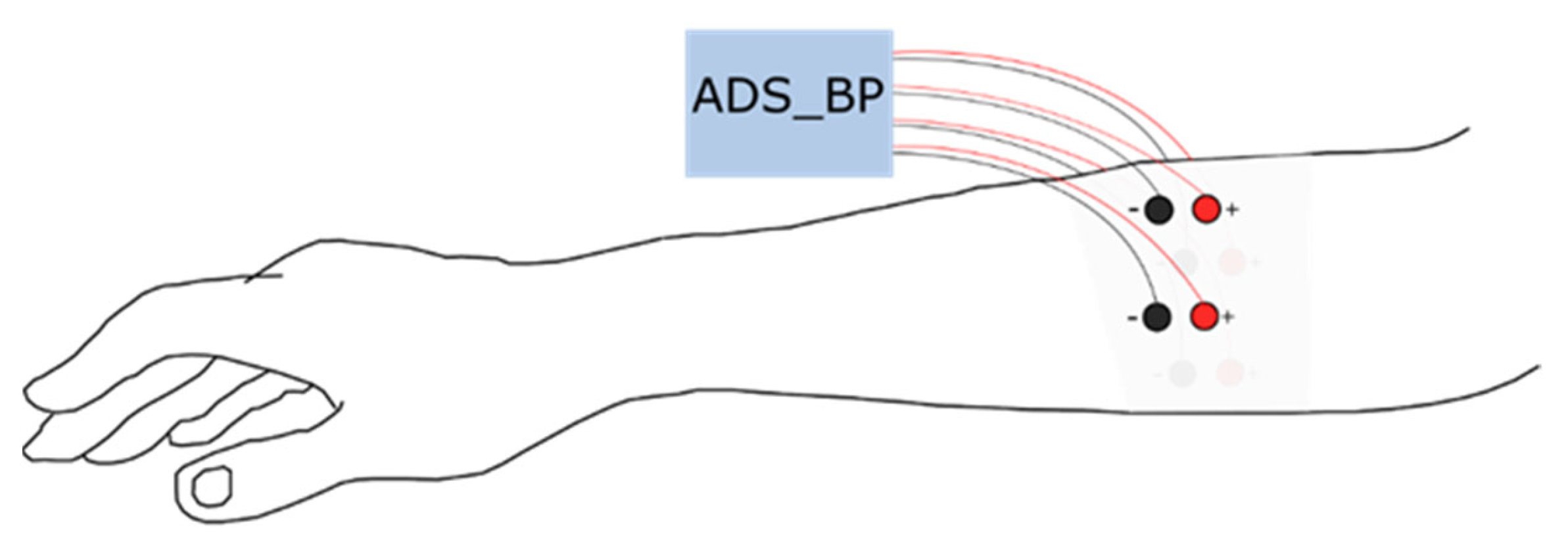
2.1. EMG Data Acquisition
2.2. Preprocessing
2.3. Feature Extraction
- Mean Absolute Value (MAV)
- Zero Crossings (ZC)
- Slope Sign Changes (SSC)
- Waveform Length
2.4. Classification
2.4.1. Multilayer Perceptron (MLP)
2.4.2. Regulatory Feedback Networks (RFN)
2.4.3. Supervised Self-Organized Map (SSOM)
2.4.4. Linear Discriminant Analysis (LDA)
2.4.5. Support Vector Machine (SVM)
2.4.6. K-Nearest Neighbor (KNN)
2.4.7. Maximum Likelihood Estimation (MLE)
2.4.8. Decision Tree (DT)
2.4.9. Non-Negative Matrix Factorization (NMF)
2.5. Evaluation
3. Results
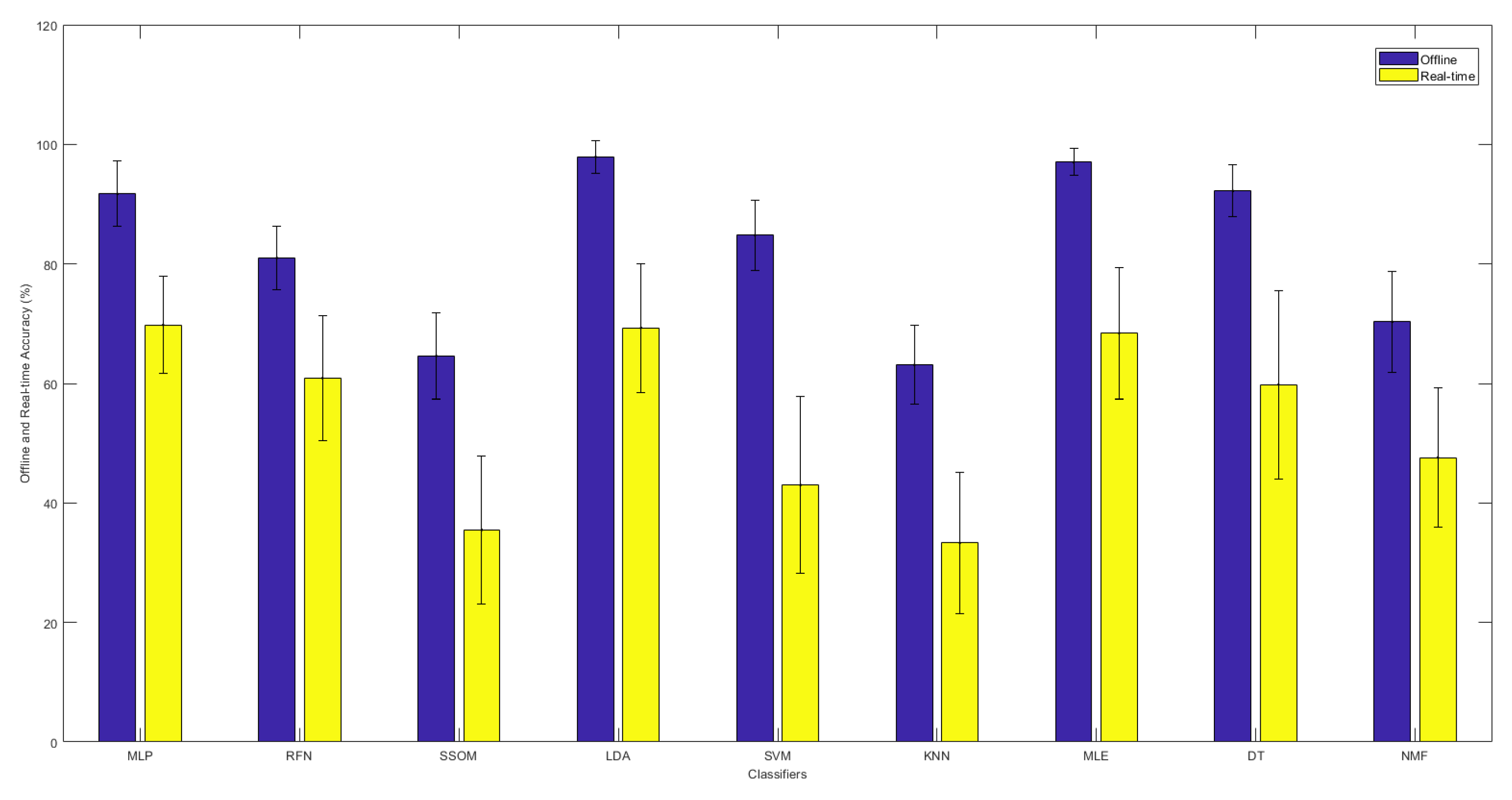
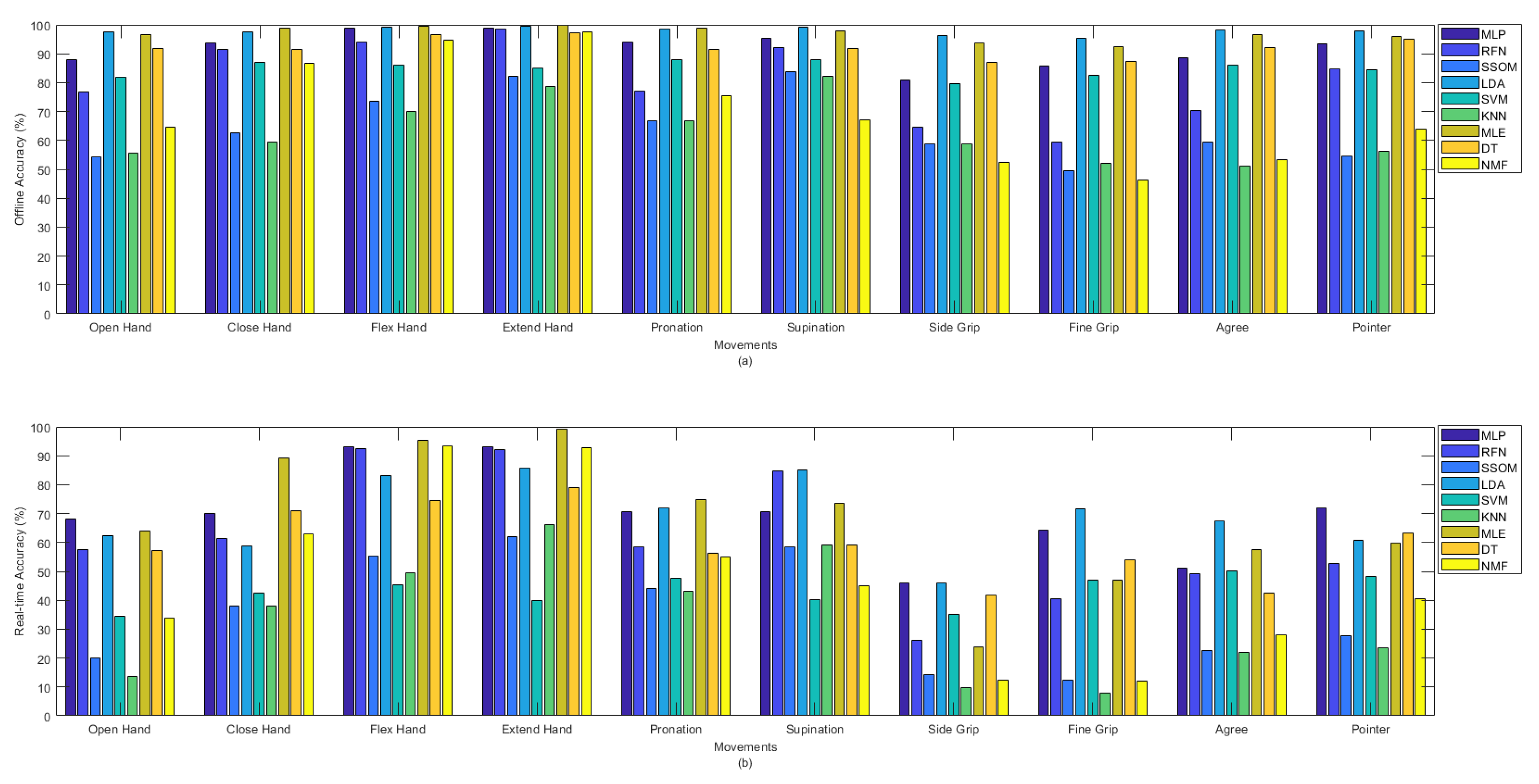
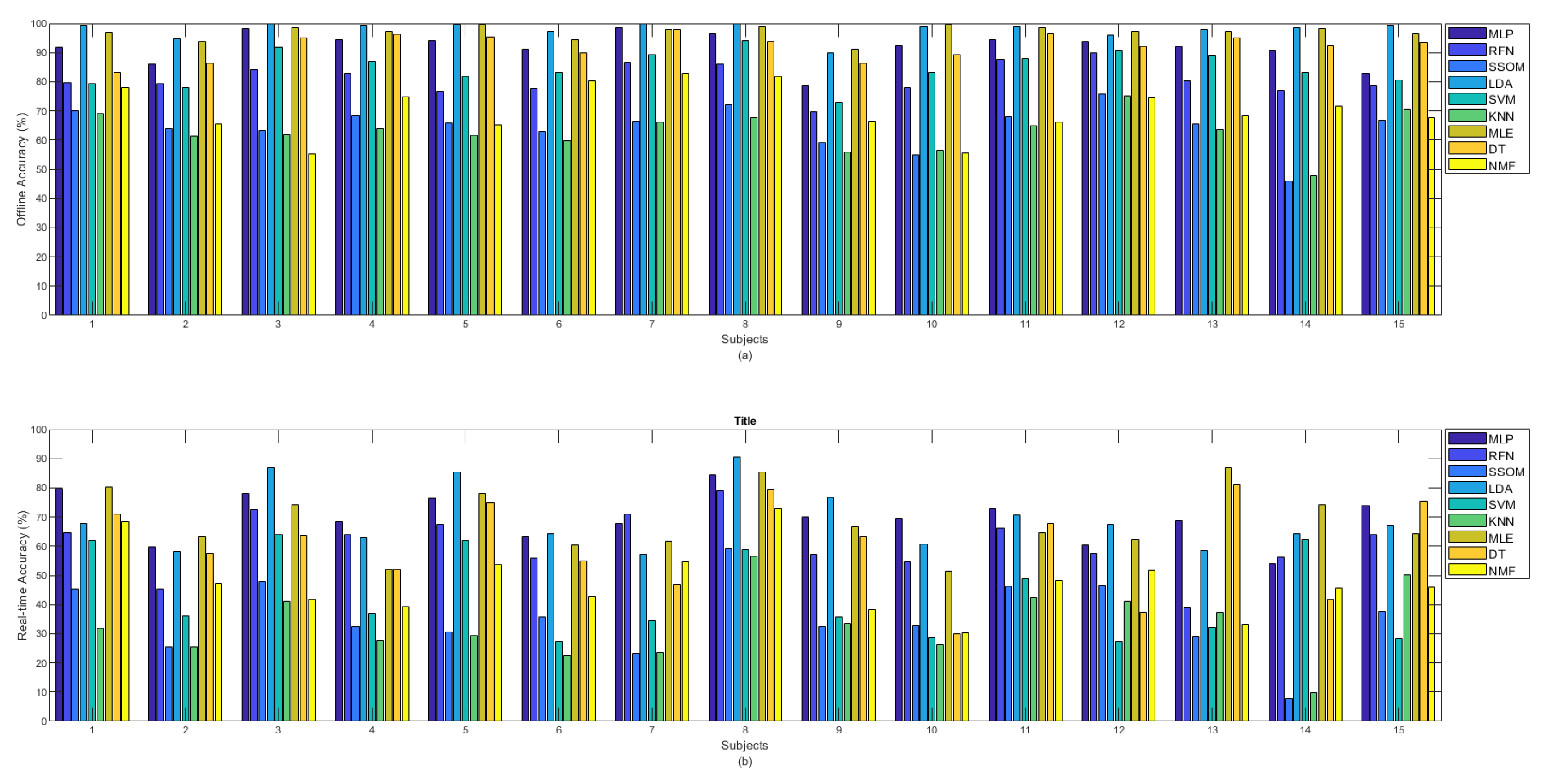
3.1. Accuracy
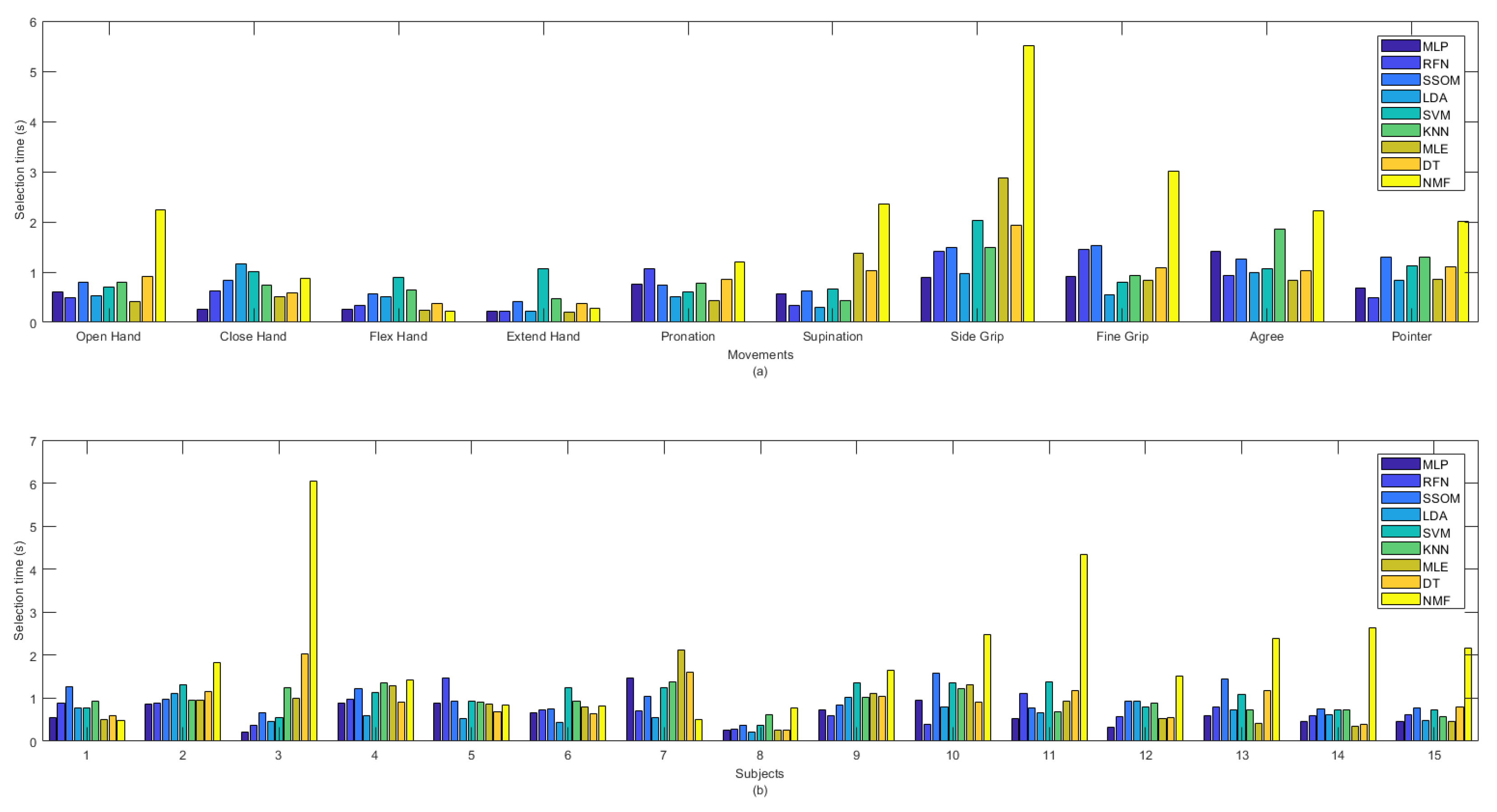
3.2. Selection Time
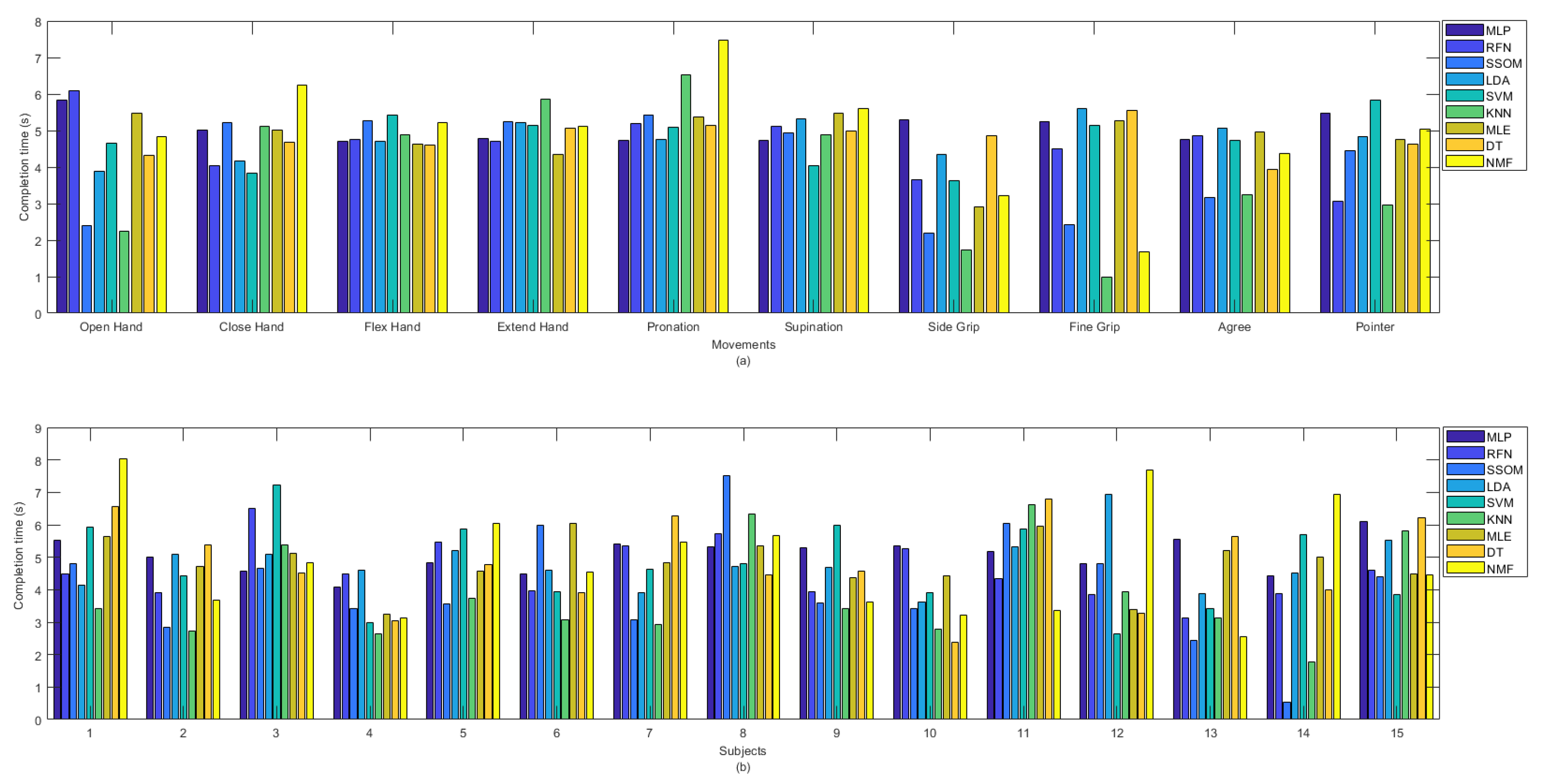
3.3. Completion Time
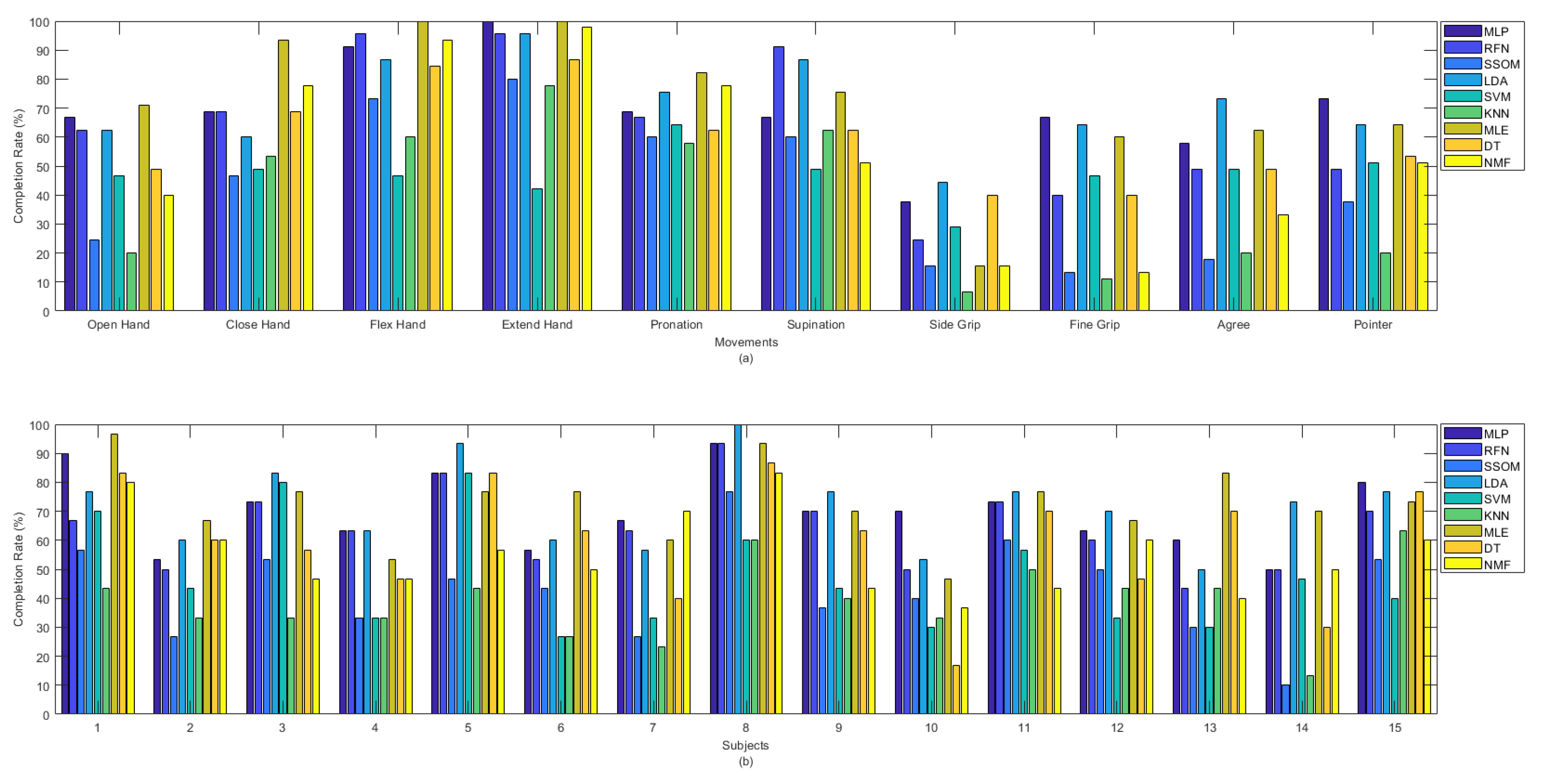
3.4. Completion Rate
4. Discussion
4.1. Offline and Real-Time Performance
4.2. Trends in Offline and Real-Time Performance Metrics
4.3. Comparison with Existing Literature
4.4. Effect of Classifier Properties on Performance Metrics
4.5. Sources for Bias and Variability
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Englehart, K.; Hudgins, B.; Parker, P.; Stevenson, M. Classification of the myoelectric signal using time-frequency based representations. Med. Eng. Phys. 1999, 21, 431–438. [Google Scholar] [CrossRef]
- Scheme, E.J.; Englehart, K.B.; Hudgins, B.S. Selective Classification for Improved Robustness of Myoelectric Control Under Nonideal Conditions. IEEE Trans. Biomed. Eng. 2011, 58, 1698–1705. [Google Scholar] [CrossRef] [PubMed]
- Oskoei, M.A.; Hu, H. GA-based Feature Subset Selection for Myoelectric Classification. In 2006 IEEE International Conference on Robotics and Biomimetics; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2006; pp. 1465–1470. [Google Scholar]
- Hudgins, B.; Parker, P.A.; Scott, R. The Recognition Of Myoelectric Patterns For Prosthetic Limb Control. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, New Orleans, LA, USA, 4–7 November 1988; pp. 2040–2041. [Google Scholar]
- Phinyomark, A.; Scheme, E. An Investigation of Temporally Inspired Time Domain Features for Electromyographic Pattern Recognition. In Proceedings of the 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–22 July 2018; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA; pp. 5236–5240. [Google Scholar]
- Shenoy, P.; Miller, K.J.; Crawford, B.; Rao, R.P.N. Online Electromyographic Control of a Robotic Prosthesis. IEEE Trans. Biomed. Eng. 2008, 55, 1128–1135. [Google Scholar] [CrossRef] [PubMed]
- Geng, Y.; Sabatini, A.M.; Weir, R.; Li, G. Improving the Robustness of Real-Time Myoelectric Pattern Recognition against Arm Position Changes in Transradial Amputees. BioMed Res. Int. 2017, 2017, 5090454. [Google Scholar] [CrossRef] [PubMed]
- Guo, S.; Pang, M.; Gao, B.; Hirata, H.; Ishihara, H. Comparison of sEMG-Based Feature Extraction and Motion Classification Methods for Upper-Limb Movement. Sensors 2015, 15, 9022–9038. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.; Oskoei, M.A.; Hu, O. Multi-finger myoelectric signals for controlling a virtual robotic prosthetic hand. Int. J. Model. Identif. Control 2017, 27, 181. [Google Scholar] [CrossRef] [Green Version]
- Ortiz-Catalan, M.; Brånemark, R.; Håkansson, B. BioPatRec: A modular research platform for the control of artificial limbs based on pattern recognition algorithms. Source Code Biol. Med. 2013, 8, 11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krasoulis, A.; Kyranou, I.; Erden, M.S.; Nazarpour, K.; Vijayakumar, S. Improved prosthetic hand control with concur-rent use of myoelectric and inertial measurements. J. Neuroeng. Rehabil. 2017, 14, 71. [Google Scholar] [CrossRef]
- Jiralerspong, T.; Nakanishi, E.; Liu, C.; Ishikawa, J. Experimental study of real-time classification of 17voluntary move-ments for multi-degree myoelectric prosthetic hand. Appl. Sci. 2017, 1163, 7. [Google Scholar]
- Ortiz-Catalan, M.; Håkansson, B.; Brånemark, R. Real-Time and Simultaneous Control of Artificial Limbs Based on Pat-tern Recognition Algorithms. IEEE Trans. Neural. Syst. Rehabil. Eng. 2014, 22, 756–764. [Google Scholar] [CrossRef] [PubMed]
- Kuiken, T.A. Targeted Muscle Reinnervation for Real-time Myoelectric Control of Multifunction Artificial Arms. JAMA 2009, 301, 619–628. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Parajuli, N.; Sreenivasan, N.; Bifulco, P.; Cesarelli, M.; Savino, S.; Niola, V.; Esposito, D.; Hamilton, T.J.; Naik, G.R.; Gunawardana, U.; et al. Real-Time EMG Based Pattern Recognition Control for Hand Prostheses: A Review on Existing Methods, Challenges and Future Implementation. Sensors 2019, 19, 4596. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abbaspour, S.; Lindén, M.; GholamHosseini, H.; Naber, A.; Ortiz-Catalan, M. Evaluation of surface EMG-based recogni-tion algorithms for decoding hand movements. Med. Biol. Eng. Comput. 2020, 58, 83–100. [Google Scholar] [CrossRef] [Green Version]
- Mastinu, E.; Hakansson, B.; Ortiz-Catalan, M. Low-cost, open source bioelectric signal acquisition system. In Proceedings of the 2017 IEEE 14th International Conference on Wearable and Implantable Body Sensor Networks (BSN), Eindhoven, The Netherlands, 9–12 May 2017; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA; pp. 19–22. [Google Scholar]
- Farfán, F.D.; Politti, J.C.; Felice, C.J. Evaluation of EMG processing techniques using Information Theory. Biomed. Eng. Online 2010, 9, 72. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ortiz-Catalan, M.; Brånemark, R.; Håkansson, B. Biologically Inspired Algorithms Applied to Prosthetic Control. In Biomedical Engineering; ACTA Press: Innsbruck, Austria, 2012; pp. 35–44. [Google Scholar]
- Smith, L.H.; Hargrove, L.J.; Lock, B.A.; Kuiken, T.A. Determining the optimal window length for pattern recogni-tion-based myoelectric control: Balancing the competing effects of classification error and controller delay. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 19, 186–192. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zecca, M.; Micera, S.; Carrozza, M.C.; Dario, P. Control of Multifunctional Prosthetic Hands by Processing the Electromyographic Signal. Crit. Rev. Biomed. Eng. 2002, 30, 459–485. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tenore, F.V.G.; Ramos-Murguialday, A.; Fahmy, A.; Acharya, S.; Etienne-Cummings, R.; Thakor, N. Decoding of Individuated Finger Movements Using Surface Electromyography. IEEE Trans. Biomed. Eng. 2009, 56, 1427–1434. [Google Scholar] [CrossRef] [PubMed]
- Zardoshti-Kermani, M.; Wheeler, B.; Badie, K.; Hashemi, R. EMG feature evaluation for movement control of upper extremity prostheses. IEEE Trans. Rehabil. Eng. 1995, 3, 324–333. [Google Scholar] [CrossRef]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Feature reduction and selection for EMG signal classification. Expert Syst. Appl. 2012, 39, 7420–7431. [Google Scholar] [CrossRef]
- Hudgins, B.; Parker, P.; Scott, R.N. A new strategy for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 1993, 40, 82–94. [Google Scholar] [CrossRef] [PubMed]
- Ortiz-Catalan, M.; Håkansson, B.; Brånemark, R. Real-time classification of simultaneous hand and wrist motions using Artificial Neural Networks with variable threshold outputs. In Proceedings of the XXXIV International Conference on Artificial Neural Networks (ICANN), Amsterdam, The Netherlands, 15–16 May 2013. [Google Scholar]
- Achler, T.; Amir, E. Input feedback networks: Classification and inference based on network structure. Artif. Gen. Intell. Proc. 2008, 171, 15–26. [Google Scholar]
- Haykin, S. Neural Networks: A Comprehensive Foundation, 2nd ed.; Prentice-Hall Inc.: Upper Saddle River, NJ, USA, 1999; p. 842. [Google Scholar]
- Ballabio, D.; Vasighi, M.; Filzmoser, P. Effects of supervised Self Organizing Maps parameters on classification perfor-mance. Anal. Chim. Acta 2013, 765, 45–53. [Google Scholar] [CrossRef] [PubMed]
- Nazmi, N.; Rahman, M.A.A.; Yamamoto, S.-I.; Ahmad, S.A.; Zamzuri, H.; Mazlan, S.A. A Review of Classification Techniques of EMG Signals during Isotonic and Isometric Contractions. Sensors 2016, 16, 1304. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tsai, A.-C.; Hsieh, T.-H.; Luh, J.-J.; Lin, T.-T. A comparison of upper-limb motion pattern recognition using EMG signals during dynamic and isometric muscle contractions. Biomed. Signal. Process. Control 2014, 11, 17–26. [Google Scholar] [CrossRef]
- Shin, S.; Tafreshi, R.; Langari, R. A performance comparison of hand motion EMG classification. In Proceedings of the 2nd Middle East Conference on Biomedical Engineering, Doha, Qatar, 17–20 February 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 353–356. [Google Scholar]
- Hu, Y.H. List of Matlab M-Files Used in ECE/CS/ME 539. Available online: http://homepages.cae.wisc.edu/~ece539/matlab/ (accessed on 28 March 2018).
- Rani, P.; Sarkar, N.; Liu, C. Maintaining Optimal Challenge in Computer Games through Real-Time Physiological Feedback. In Proceedings of the 1st International Conference on Augmented Cognition, Las Vegas, NV, USA, 22–27 July 2005; pp. 22–27. [Google Scholar]
- Kokol, P.; Mernik, M.; Završnik, J.; Kancler, K.; Malčić, I. Decision Trees Based on Automatic Learning and Their Use in Cardiology. J. Med. Syst. 1994, 9, 201–206. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Ngom, A. The non-negative matrix factorization toolbox for biological data mining. Source Code Biol. Med. 2013, 8, 10. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Ngom, A. Classification approach based on non-negative least squares. Neurocomputing 2013, 118, 41–57. [Google Scholar] [CrossRef]
- Resnik, L.; Etter, K.; Klinger, S.L.; Kambe, C. Using virtual reality environment to facilitate training with advanced up-per-limb prosthesis. J. Rehabil. Res. Dev. 2011, 48, 707–718. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Offline | Real-Time | ||||||
|---|---|---|---|---|---|---|---|
| Accuracy (%) | TrTime (s) | TTime (ms) | Accuracy (%) | SelTime (s) | CompTime (s) | CompRate (%) | |
| MLP | 91.7 b ± 5.47 | 14.9 b ± 0.474 | 0.115 b ± 0.066 | 69.8 a ± 8.16 | 0.657 b ± 0.327 | 5.06 a ± 0.528 | 69.8 ab ± 12.8 |
| RFN | 81.0 c ± 5.25 | 0.442 c ± 0.044 | 0.935 b ± 0.047 | 60.9 bc ± 10.4 | 0.732 b ± 0.310 | 4.60 abc ± 0.895 | 64.2 abc ± 13.7 |
| SSOM | 64.6 e ± 7.20 | 5.85 c ± 0.235 | 0.162 b ± 0.039 | 35.5 ef ± 12.4 | 0.955 b ± 0.316 | 4.07 bc ± 1.69 | 42.9 e ± 16.5 |
| LDA | 97.9 a ± 2.69 | 0.342 c ± 0.058 | 2.20 b ± 0.090 | 69.3 ab ± 10.8 | 0.659 b ± 0.238 | 4.79 ab ± 0.815 | 71.3 a ± 14.4 |
| SVM | 84.8 c ± 5.84 | 0.679 c ± 0.154 | 2.43 b ± 0.139 | 43.0 de ± 14.8 | 1.00 b ± 0.327 | 4.75 ab ± 1.31 | 47.3 de ± 18.6 |
| KNN | 63.1 e ± 6.63 | 0.507 c ± 0.181 | 9.69 b ± 0.628 | 33.3 f ± 11.9 | 0.944 b ± 0.262 | 3.85 c ± 1.48 | 38.9 e ± 13.1 |
| MLE | 97.0 a ± 2.25 | 0.171 c ± 0.036 | 0.150 b ± 0.033 | 68.4 abc ± 11.0 | 0.858 b ± 0.486 | 4.82 ab ± 0.806 | 72.4 a ± 13.3 |
| DT | 92.2 b ± 4.33 | 0.408 c ± 0.151 | 0.642 b ± 0.037 | 59.8 c ± 15.8 | 0.926 b ± 0.462 | 4.78 ab ± 1.34 | 59.6 bc ± 20.4 |
| NMF | 70.3 d ± 8.49 | 46.3 a ± 29.5 | 286.6 a ± 161.5 | 47.6 d ± 11.7 | 1.99 a ± 1.52 | 4.88 ab ± 1.72 | 55.1 cd ± 14.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abbaspour, S.; Naber, A.; Ortiz-Catalan, M.; GholamHosseini, H.; Lindén, M. Real-Time and Offline Evaluation of Myoelectric Pattern Recognition for the Decoding of Hand Movements. Sensors 2021, 21, 5677. https://doi.org/10.3390/s21165677
Abbaspour S, Naber A, Ortiz-Catalan M, GholamHosseini H, Lindén M. Real-Time and Offline Evaluation of Myoelectric Pattern Recognition for the Decoding of Hand Movements. Sensors. 2021; 21(16):5677. https://doi.org/10.3390/s21165677
Chicago/Turabian StyleAbbaspour, Sara, Autumn Naber, Max Ortiz-Catalan, Hamid GholamHosseini, and Maria Lindén. 2021. "Real-Time and Offline Evaluation of Myoelectric Pattern Recognition for the Decoding of Hand Movements" Sensors 21, no. 16: 5677. https://doi.org/10.3390/s21165677
APA StyleAbbaspour, S., Naber, A., Ortiz-Catalan, M., GholamHosseini, H., & Lindén, M. (2021). Real-Time and Offline Evaluation of Myoelectric Pattern Recognition for the Decoding of Hand Movements. Sensors, 21(16), 5677. https://doi.org/10.3390/s21165677