Abstract
To improve the efficiency of in-wharf vessels and out-wharf vessels in seaports, taking into account the characteristics of vessel speeds that are not fixed, a vessel scheduling method with whole voyage constraints is proposed. Based on multi-time constraints, the concept of a minimum safety time interval (MSTI) is clarified to make the mathematical formula more compact and easier to understand. Combining the time window concept, a calculation method for the navigable time window constrained by tidal height and drafts for vessels is proposed. In addition, the nonlinear global constraint problem is converted into a linear problem discretely. With the minimum average waiting time as the goal, the genetic algorithm (GA) is designed to optimize the reformulated vessel scheduling problem (VSP). The scheduling methods under different priorities, such as the first-in-first-out principle, the largest-draft-vessel-first-service principle, and the random service principle are compared and analyzed experimentally with the simulation data. The results indicate that the reformulated and simplified VSP model has a smaller relative error compared with the general priority scheduling rules and is versatile, can effectively improve the efficiency of vessel optimization scheduling, and can ensure traffic safety.
1. Introduction
The port management department manages the entry and exit operations of most ships through a service with a fixed timetable. With the development of large-scale ships, the capacity of ships in port waters has gradually become restricted. For example, in the port of Tianjin shown in Figure 1, formerly known as the port of Tanggu, all ship movements and major operations must be consistent with the directive requirement of the Tianjin Port Group’s Operations Department. When sailing on the main fairway that is area A in Figure 1, the under-keel clearance (UKC) shall not be less than 1.7 m. When one-way navigation is applied, a vessel shall keep a safe distance of more than six times her own vessel’s length with other vessels. Therefore, the control of the vessel traffic requires further consideration of many factors involving the depth of the port waters, the height of the tide, the ship’s draft, the time or speed of the ship entering and leaving the port, the estimated time of arrival (ETA), etc.
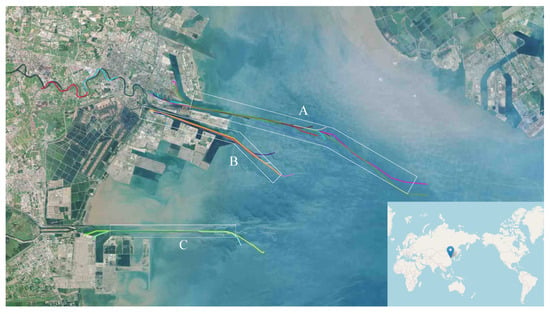
Figure 1.
Research port area and the trajectory of in-wharf vessels and out-wharf vessels.
To overcome the problem of low manual scheduling efficiency, some works had been presented from the view of the reduction of occupied time in berth, anchorage, or the channel. Many studies focus on increasing navigation efficiency in inland ports, seaports, and waterways through applying simulation techniques. Some of these works adopt the idea of collision-free routing to control the traffic at a canal. Günther, E. et al. [1,2] designed a successive shortest path algorithm respecting blocked time windows to solve the optimization problem of ship traffic control at the Kiel Canal by constructing conflict-free dynamic routes for the ships one after another. Lübbecke, E. et al. [3] further integrate two algorithms that address collision avoidance to solve the combinatorial optimization problem of ship traffic control at the Kiel Canal: one is train scheduling on a single-track railway network and the other is collision-free routing for automated guided vehicles. Moreover, a fast heuristic was developed which can make the average time consumed be less than two minutes to plan all ships for one day. Meisel, F. [4] and Skjæveland, G. [5] extended the MIP model of Lübbecke, E. et al. [3] by deciding speeds of vessels rather than assuming constant given speeds. Andersen, T. et al. [6] further extended the previous works on traffic control of the Kiel Canal considering the uncertainty characteristic of the time of arrival at the entrance to the canal. Moreover, some other works focus on heuristic algorithms and mathematical models to optimize the navigation plan. Muñuzuri, J. [7] utilized an exhaustive search algorithm for the optimal scheduling at inland waterways subject to tidal variations in depth. Considering the effect of the periodic tide, Kelareva, E. [8] proposed CP and MIP methods for ship scheduling. Zhang, B. [9,10] established two scheduling models for the vessel through the one-way channel and compound channel, respectively, with a genetic algorithm (GA). Most research on vessel scheduling problems (VSP) concerns how to obtain a baseline schedule in a static and deterministic environment with complete information [11,12,13].
Studies on the vessel transportation scheduling solution for entering and leaving ports have largely focused on a single aspect of channel usage efficiency or berth operation. However, few have considered coordination between channel and berth resource demands. With regard to this problem, Guo Zijian et al. [14] proposed an integrated scheduling model which can simultaneously optimize the vessel sequence, lay-by berth allocation, and de-ballasting plan. The integrated optimization model of the berth allocation problem (BAP) and VSP in a seaport with a one-way navigation channel were constructed by Zhang, X. et al. [15] and Liu, B. et al. [16]. Zhang, X. et al. [17] also reduced the total scheduling time by more than 40% for a one-way port-channel unitizing multi-objective genetic algorithm (MOGA). Based on an analysis of the navigation mode and the traffic conflicts in a compound waterway, the optimization model was expanded to solve the VSP in a compound waterway of a large harbor by Zhang, X. [18]. Lalla-Ruiz et al. [19] introduced the waterway ship scheduling problem (WSSP) where the goal is to minimize the ship’s waiting time on the Yangtze Estuary (Shanghai) with greedy heuristics (GH) and simulated annealing (SA). Hill, A. and Lalla-Ruiz et al. [20] reconstructed the ship scheduling model under multi-mode resource constraints which considered the management of inbound and outbound ships. Considering the effect of traffic conflicts in the Huanghua coal port where multi-harbor basins share a restricted channel, Li, J. et al. [21] developed a heuristic algorithm to tackle the mode by integrating the non-dominated sorting genetic algorithm II (NSGA-II) and Tabu Search (TS). Dulebenets, M. A. [22,23] provided a comprehensive multi-objective optimization model to tackle the VSP in liner shipping and summarized critical literature and future research directions. Kang, L. [24] formulated the uncertain ship arrival and tugging times for container ports as a finite set of discrete scenarios and proposed a mixed-integer linear programming model. Ulusçu, Ö. S. [25,26] modeled the waiting time approximation in queueing systems with multi-types of class-dependent interruptions. Except for this, all the other studies are the deterministic models for tugboat scheduling optimization [27,28,29,30,31].
In summary, the current vessel sequence arrangement operations ignore variables in realistic situations such as the sailing speed through the channel, equipment failures, and other unforeseen events. These previous studies listed in Table 1 did not consider that the sailing speed is not fixed, shown in Figure 2, during the implementation of the optimal plan; therefore, the optimal result based on the constant speed cannot clearly represent the situation of practical implementation. Thus, the major objective of this study is to tackle the vessel scheduling optimization problem based on variable speed in a one-way navigation channel. However, different from the above-mentioned deterministic optimization work [32], there are many theories about uncertainty optimization and they have been well-applied in other fields, such as fuzzy programming, stochastic optimization, and robust optimization [33]. For the VSP under uncertainty, all of the above uncertain theories can be utilized to model the problem from different perspectives. In this study, the vessel scheduling optimization problem based on variable speed in a one-way navigation channel was tackled by extending the local safety distance constraint problem at the entrance and exit of the channel to the global safety distance constraint problem for the entire channel.

Table 1.
Contributions to related studies on the VSP.
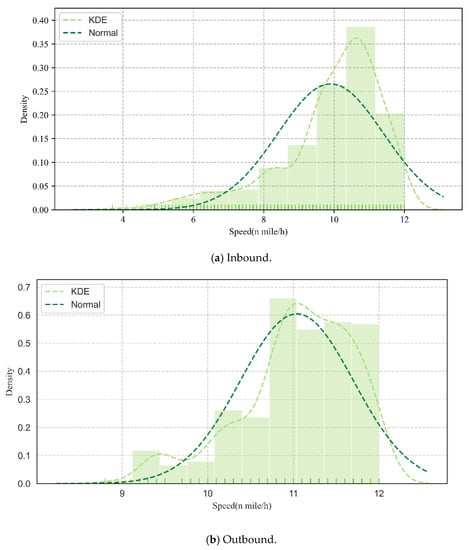
Figure 2.
Speed distribution of in-wharf vessels and out-wharf vessels in March 2015. Where the lighter dashed line represents the kernel density distribution curve of speed, the darker dotted line indicates the normal distribution curve of speed, the short solid line indicates the statistical speed data, and the histogram indicates the density distribution of speed intervals.
The following studies consist of five sections. Section 2 states the vessel scheduling problem and the whole operation process as well as different encounter situations in a one-way waterway. Section 3 introduces the assumptions and limitations for the proposed VSP model and develops the mathematical model of vessel scheduling under indeterminate speed. Besides, a concept of Minimum safety time interval (MSTI) is also proposed in Section 3 to reduce time constraints by integrating multi-time constraints. A heuristic algorithm GA to optimize the scheduling solution is designed in Section 4. In Section 5, numerical experimental analysis is carried out to compare the efficiency between different methods for optimal scheduling and verify the effectiveness of the proposed VSP model. Section 6 concludes the attribution of this study and the future work.
2. Problem Settings
Vessel scheduling optimization aims to arrange the sequence of in-wharf vessels and out-wharfs vessels that change in real-time while reducing the waiting time of vessels and the occupancy rate of resources such as waterways, anchorages, and berths as much as possible [34]. In the actual production process of the port, vessel scheduling includes three major resources. The most concerned is the channel and berth resource optimization problem. In a one-way waterway, there are four types of encounter situations including following, keep away, overtaking, and head-to-head shown in Figure 3b. Due to the fact that the waterway cannot be shared by more than one vessel, another vessel needs to wait out of the waterway until the waterway is clear because there exists a conflict, which is referred to as the head-to-head situation shown as in Figure 3b. The encounter type of keeping away means that the speed of the rear vessel is slower than the front vessel in the same direction, and the other encounter situations are also differentiated based on the direction and magnitude of the speed. Generally, the speed of in-wharf vessels and out-wharf vessels does not remain constant; therefore, the related research just considering the fixed speed [9,10,14,15,16,17,18] will be difficult to apply to actual production. In reality, constrained by different operation tasks, vessels usually enter or exit the channel from different waters during both the in-wharf process and out-wharf process [33]. Therefore, the position of entering or exiting the channel is not fixed, which would be different with different operation tasks. For convenience, as shown in Figure 3b, the one-way channel studied in this research was assumed to have the same position for entering the channel from anchorage, open sea, or berth or exiting the channel in the above three waters.
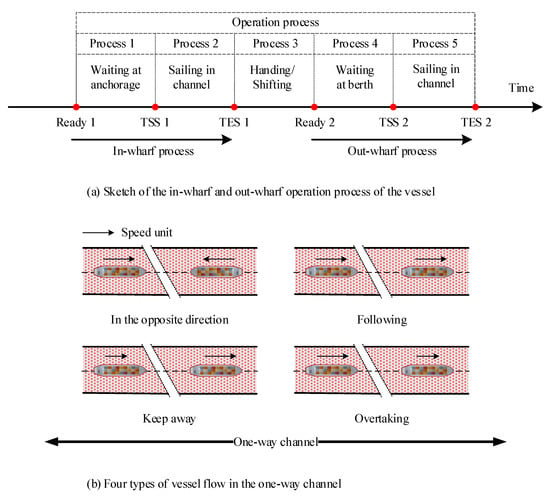
Figure 3.
Schematic diagram of the ship operation process and traffic flow.
In the actual production process of the port, the whole operation process can be divided into 5 parts as shown in Figure 3a, which includes multi-time constraints such as the estimated time of arrival (ETA), time of start scheduling (TSS), time of end scheduling (TES), delaying time (DT), and navigable time windows (NTW) with the tidal constraint. The vessel can enter the channel until the allotted time (TSS 1 or TSS 2), and before this, the vessel needs to wait at the anchorage, open sea, or berth from ETA to TSS (Process 1 or Process 4). Therefore, what we need to determine is the TSS of vessels according to the related time constraint considering the requirement of safe distance for adjacent vessels, and then determine the assigned order of vessels based on TSS.
3. Vessel Scheduling Optimization Model Formulation
3.1. Assumptions and Limitations
Considering the actual situation of port production, a series of assumptions are defined as follows:
- There are sufficient berths and anchorage resources, and only the issue of ship entry and exit sequence is considered.
- All the relevant time parameters of ships entering and leaving the port are known in advance, and the trajectory in the channel is also known [16].
- The channel has only one entry position and one exit position where no overtaking is allowed.
- We assume that the safe navigation distance between ships in the same direction is six times the length of the ship behind, and the safe threshold is 12 min in the opposite direction [15,17,18].
3.2. Vessel Scheduling Optimization Model
One-way channel ‘A’ in Figure 1 is an example which is used to illustrate the optimization process of vessel scheduling. We assume that there are two in-wharf vessels and three out-wharf vessels. The in-wharf vessels are labeled 1 and 2, while the out-wharf vessels are labeled 3, 4, and 5, respectively. Table 2 is a sample of a vessel plan which includes the identifiers (e.g., ship name, mmsi, imo, call sign), module parameters (e.g., length, width, draft), information about entry or exit from the seaport (e.g., estimated time of arrival, start time, end time, state, etc.), and some other relevant information. Actually, in practice, before the plan is scheduled, we only know some key information from Table 2 as listed in Table 3, which involves the environment information as shown in Table 2, the movement types, and some other information about entry or exit from the seaport.
Table 2.
Sample vessel plan.
Table 3.
Sample general VSP instance.
Table 4 is a brief analysis of the vessel schedules of the two in-wharf vessels and three out-wharf vessels with 120 kinds of schedule solutions for VSP optimization. Furthermore, if there are in-wharf vessels and out-wharf vessels, there would be possible timing sequence combinations based on the theory of arrangement and combination. Therefore, the larger the number of vessels, the longer the number of timing sequences. The enumeration method would not be applicable to solve the problem. The following section specifically proposes a MILP model to optimize the schedule of vessels passing through the one-way waterway under variable speed.
Table 4.
VSP optimization sequence analysis.
3.2.1. Scheduling Optimization Model for VSP
One general VSP model contains many time parameters; the sets, parameters, and decision variables utilized in the following section are defined in Table 5.
Table 5.
Notation.
A general VSP model contains many time parameters; for example, the relationship between the time at the end of the channel and the time at the entrance of the channel can be stated as Equation (1).
After determining the relevant time parameters, the objective function for vessel waiting is obtained, which is defined as the actual time of start scheduling to enter the conflict areas as shown in Figure 3 in a one-way waterway, minus the estimated time of arrival. Therefore, the total waiting time for all vessels to pass through a one-way waterway is shown as Equation (2).
Furthermore, the objective function can be defined as Equation (3).
Equation (4) states the relationship between the estimated time of arrival and the scheduled time.
The depth safety can be constrained by the time window of the tide shown in Equations (5) and (6), where Equation (5) guarantees that the time at the entrance of any channel is greater than the lower bound of the time window. Formula (6) ensures the time at the end of the final channel in the channel chain is less than the upper bound of the time window.
The safety distance between adjacent vessels in the same direction can be stated by Equations (7) and (8), which state the relationship of the entrance time and the exit time of two adjacent vessels in the schedule in the same direction.
To transform the formula into a normal style that can be optimized by a commercial solver, Equations (7) and (8) can be transformed as Formulas (9)–(11). Constraint (11) ensures Equations (9) and (10) can have the same sequential relationship between two vessels sailing at the entrance and end of the channel.
Because these Formulas (9)–(11) are non-linear, we must further transform them according to the linear constraint by using 0–1 variables as Formulas (12) and (13).
Equations (12) and (13) can be further expressed as Formulas (14)–(17) by introducing a sufficiently large positive constant .
After multi-step conversion, Formulas (9) and (10) are linearized into formulas (14)–(17). Constraints (14) and (15) guarantee that the time interval of any two vessels scheduled at the entrance of a channel is greater than the safe time interval in the same direction. Constraints (16) and (17) ensure the time interval of any two vessels scheduled at the end of a channel is greater than the safe time interval in the same direction.
The safety distance between adjacent vessels in the opposite direction can be stated by constraint (18), which is to ensure the safety between any vessels in the opposite direction. Adopting the same conversion theory as Formulas (12) and (13), the nonlinear constraints can be transformed into linear constraints as formulas (19, 20) by introducing a 0–1 variable . , which means the vessel precedes , 1 otherwise.
Since the time decision variable has a serious impact on optimization efficiency, an upper limit is set for the time at the end of a channel shown as Constraint (21), where is greater than 1.
Above all, the general scheduling of the in-wharf and out-wharf vessels consists of a mixed-integer linear programming model shown as in Formula (22).
3.2.2. Improved Scheduling Optimization Model Based on Variable Speed
Based on the scheduling optimization model Formula (22), the optimal schedule result of the sample in Table 3 is shown in Table 6, which includes different results optimized by different priorities. Figure 4 shows the Gantt diagram of the best solution by GA. Figure 5 shows the diagram of temporal-spatial trajectories optimized by LDVFS and GA, where S1, S2, and S3 indicate the different stages of a voyage. From Figure 5, we can find that due to the existence of variable speed, if just considering the safety threshold at the entrance and exit points of the channel (stage S1 and stage S3) shown as Formula (22) instead of the whole process, the safety distance in stage S2 cannot be ensured.
Table 6.
Sample VSP instance and its optimal solution.
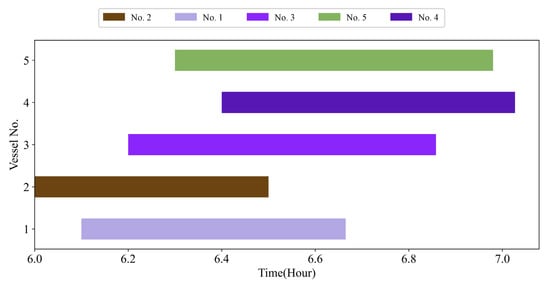
Figure 4.
Optimal Gantt for the sample instance.
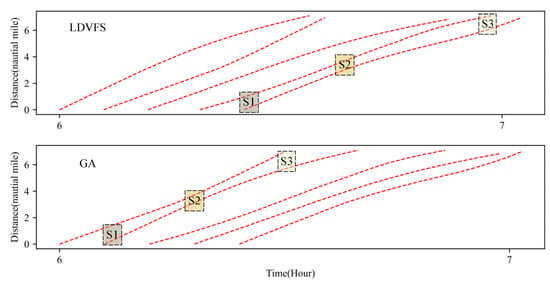
Figure 5.
Optimal trajectories for the sample instance.
To tackle this problem, considering variable speed, an improved scheduling optimization model was constructed. Because the trajectory of a ship continues, the safe navigation distance therefore needs to guarantee the whole process during sailing in the channel, not just in the entrance and exit shown as in Constraints (14–17) and (20–21).
Considering the actual trajectories of vessels, the safety requirement between any vessels can be illustrated by the temporal-spatial trajectory shown in Figure 6, which is an illustration of vessels navigating with variable speed in a one-way channel. Since the speed is variable when vessels are sailing in the channel, the vessel should therefore satisfy the minimum safety spacing requirements at any time in the same direction instead of just satisfying the safety requirement at the entrance and exit of the channel as in conflict areas 1 and 2 in Figure 6a, where vessel B and vessel C are sailing in the same direction, and vessel A is sailing in the opposite direction. When determining the sequence, as for those in the same direction as shown with vessel B and vessel C in Figure 6, the distance of the conflict areas in the channel between adjacent vessels needs to be greater than the safety threshold. As for those vessels in opposite direction as shown in vessel A and vessel B in Figure 6, the time difference and needs to have the same sign. The distance in all conflict areas between vessels at the same direction can be expressed as Equation (25), which is needed to be greater than the safety requirement set as 6 times the length of the vessel under the same movement type, where denotes the sailing distance of the vessel from the entrance of the channel, and is the sailing speed of the vessel at the time in the planning horizon . As for vessels in opposite directions, the safety threshold is set as 12 min (0.2 h), which can be constrained by Formula (24).
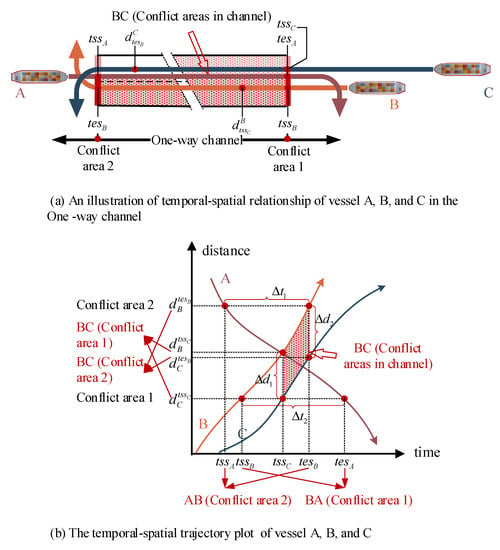
Figure 6.
An illustration of vessels navigating with variable speed in a one-way channel.
The speed of the vessel can be expressed at any time.
The initial and the termination state should satisfy the following constraints, where is the start sailing speed of the vessel , is the end sailing speed of the vessel , and is the length of the channel.
We assume as a sufficiently small positive constant, then . The formula (26) can be discretized as follows.
The safety distance of adjacent vessels in Constraint (23) can be transformed as follows.
Considering that formula (23) is non-linear, it is transformed into a discrete type defined as Formula (29). Based on Figure 6, the minimum safety time interval (MSTI) was defined as shown in Figure 7, which can ensure the adjacent vessels (A and B) have the safety distance in the entire conflict area both in the same direction and the opposite direction. The safety distance Constraint (29) is expressed as Formula (30) by introducing the parameter MSTI. In this paper, we just need to obtain the value of MSTI, where is the time threshold which can ensure that the distance of adjacent vessels satisfies the safety requirements.
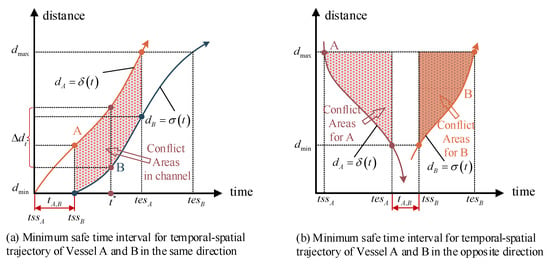
Figure 7.
The minimum safe time window between two vessels.
Utilizing the same transform method as Constraint (9), Constraint (30) can be transformed as Formulas (31)–(32) by introducing variables .
Above all, the model for vessel scheduling optimization based on speed variable can be shown as Formula (33), where the constraints are linear; therefore, this model consists of mixed-integer linear programming (MILP) that can be optimized by CPLEX solution solver of MATLAB or PYTHON.
4. Solution Approach
The optimization time of traditional commercial solvers (such as CPLEX) is directly proportional to the size of the problem; that is, as the problem size increases, the optimization time will also increase. Besides, the ship scheduling problem is a daily problem. In reality, it needs to be solved frequently considering the influence of the port operating environment, such as vessels requiring entry the port early, postponing port entry, and cancelling plans, etc. Therefore, a solution method that can provide an acceptable solution in reasonable computational times is required. To tackle this problem, on the one hand, three common-priority rule policies [35] were provided to verify the accuracy of the optimization results.
- First-in first-out (FIFO): a priority-based scheduling method and one of the manual scheduling methods. Specifically, the order of entry and exit is arranged according to the time of arrival at the port; that is, the ship that arrives first has the priority to use the channel.
- Large draft vessel first-served (LDVFS): a priority-based scheduling method and one of the manual scheduling methods. The sequence for in-wharf vessels and out-wharf vessels is arranged based on the draft. Generally, ships with larger drafts have poor maneuverability, and ports should pay more attention to them. Therefore, some ships with larger drafts are given priority to dispatch.
- Random served (RS): the sequence of both in-wharf vessels and out-wharf vessels is generated randomly. The rationale behind this is that the operator can dynamically determine the sequence of ships entering and leaving the channel without adopting a specific strategy.
On the other hand, we proposed an approach to solve the vessel scheduling problem considering variable speed (VSP*) which is based on our original GA-based vessel scheduling system (GA-VSS). Here, we briefly introduce the solution approach for VSP*.
Genetic algorithm is a popular heuristic algorithm in terms of the objective function value. It has been utilized to tackle many vessel scheduling optimization problems [9,10,15,17,18]. In this paper, single-layer real number initialization is utilized. Each individual is represented as a series of numbers, where the number on the chromosome is the assigned order. The initial population is formed by all those individuals, which are randomly generated. The advantage of this encoding and initialization method is that it is easy to encode the scheduling plan into the chromosome, and it is easy to decode and understand. The partially-matched crossover (PMX) method is used as the crossover operator. The roulette wheel selection criterion is used in GA-VSS. For a mutation operator, we combine three methods including local reverse mutation, exchange mutation, and insertion mutation. In each iteration, when a mutation operation is required, one of the above three methods is randomly selected. As for the illegal solution, we adopt the category by introducing a penalty function as formula (34), where a certain penalty is imposed on the illegal solution by adding a significant large positive constant M. Elite selection is utilized to select the top N individuals with the best fitness from the parent and offspring after the crossover operation and the mutation operation, where N is the number of both in-wharf vessels and out-wharf vessels.
5. Numerical Simulation and Analysis
5.1. Simulation Setting
In this study, instances of different scales were randomly generated with the simulation data list in Table 7. As shown in Table 8, 13 instances were randomly generated from 18 vessels based on the index combination. We have conducted 13 sets of experiments with 5 ships, 10 ships, 15 ships, and 18 ships, respectively, to verify the effectiveness of the proposed model and the designed solution algorithm.
Table 7.
Basic data of ship scheduling optimization.
Table 8.
Experimental case.
In Table 7, the number of experimental vessels is 18. The basic data simulates the situation of the main channel of Tianjin Port, which is affected by the tide height. In this study, we assume the channel can only be accessed through one-way navigation. The tide data uses the hourly tide height data of a certain day in Tianjin Port, shown in Table 9. Figure 8 shows all trajectories of in-wharf vessels and all trajectories of out-wharf vessels during the channel, where all the sailing speeds of the vessels are different, and all of the space−time trajectories start at the estimated time of arrival.
Table 9.
Hourly tide height data for a certain day in Tianjin Port.
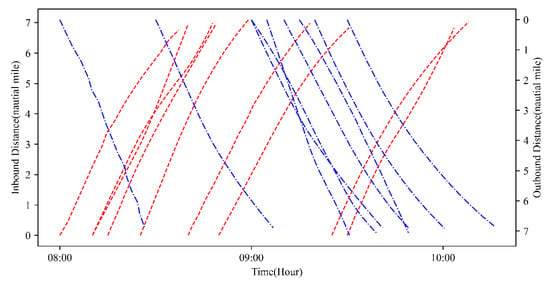
Figure 8.
Temporal−spatial trajectories of 18 vessels.
The relevant parameter settings of GA are as follows: the number of individual vessels in the population is set to the number of vessels in different instances, the population size is set to 10, the mutation probability is 0.8, the maximum number of iterations is set to 2000, the maximum number of iterations is set to 300 when the optimal solution is continuous, and the maximum value M is set to 1000.
5.2. Data Preprocessing
With analysis of the proposed optimal scheduling model, we find that we need to preprocess the above basic data. According to our original GA-based vessel scheduling system (GA-VSS), the result of data processing is shown as follows. Figure 9 is the value of MSTI between any two vessels in Table 7, where the detailed data are listed in Appendix A Table A1. The pseudocode for calculating the value of MSTI is presented in Appendix A Table A2. Figure 10 shows the navigable time windows under the constraint of tide height, where the detailed data is listed in Table 10. The line segment in Figure 10 represents the navigable time windows of the vessels, and the red point indicates the estimated time of arrival.

Figure 9.
The minimum safe time interval of 18 vessels.
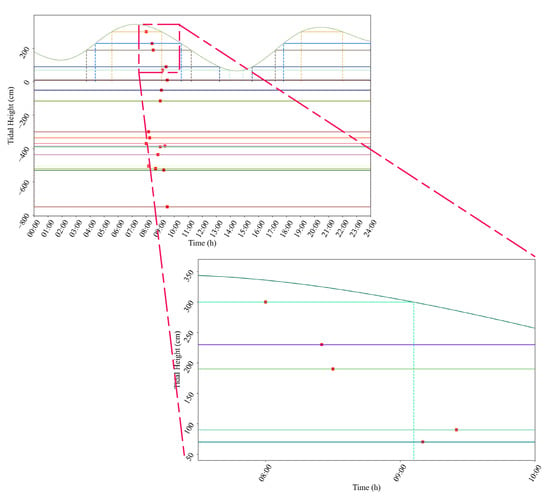
Figure 10.
Ship navigable time window under the constraint of tide height.
Table 10.
Navigable time windows constrained by tidal height.
5.3. Comparison between Different Methodologies
As mentioned before, the improved vessel scheduling optimization model is MILP; therefore, it can be directly solved by commercial solution solver CPLEX. In the following, we would analyze the effectiveness of the VSP model considering the variable speed with different optimal scheduling methods.
The final solution obtained by the GA method is shown in Table 11. Comparing it to the solution in Table 12, we can observe that the proposed GA method can also obtain a result similar to the final solution obtained by the CPLEX solver, where the relative error was smaller than other methods.
Table 11.
Optimal results of 18 vessel experiment using GA.
Table 12.
Comparisons between CPLEX, FIFO, LDVFS, RS, and GA of instance “Inst_18_1”.
Figure 11 is the iteration convergence diagram of instance “Inst_18_1” including the minimum waiting time and the average time for waiting of each generation, where the iteration ends at generation 648, and the value of the best solution remains unchanged at generation 348. To better understand the relationship between the optimization results of Table 11, the parallel coordinate graph of the optimal result was presented in Figure 12, which indicates the connection between each attribute, such as sailing time, the assigned order, the selected index of vessels, the vessels’ numbers, etc. For example, the third attribute refers to the index of the ship, and its value corresponds to ship number one to one. The fourth attribute is the numerical value corresponding to the optimization solution after the third attribute is renumbered from left to right to 1–18. Figure 13 is the Gantt diagram of the optimization result of instance “Inst_18_1”, from which the schedule of vessels can be identified. Figure 14 is the result of the decision variable in the vessel scheduling optimization model. According to the 0–1 variables in each row or column of Figure 14, the final ship dispatch sequence can be obtained. Figure 15 shows the space−time trajectories of the optimal solution of instance “Inst_18-1”, where the conversion status and the makespan can also be obtained. Compared with Figure 5, it can in the future validate the advantage of the indeterminate speed model.
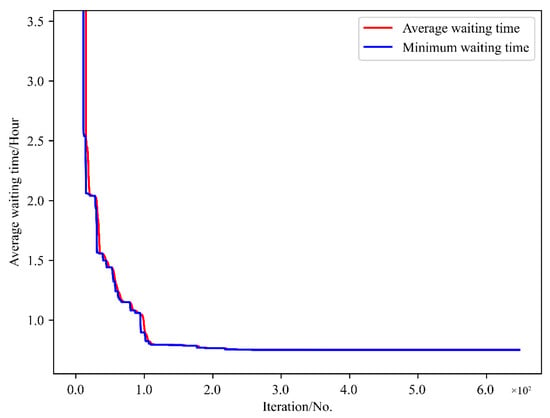
Figure 11.
Iteration convergence diagram of instance “Inst_18_1”.
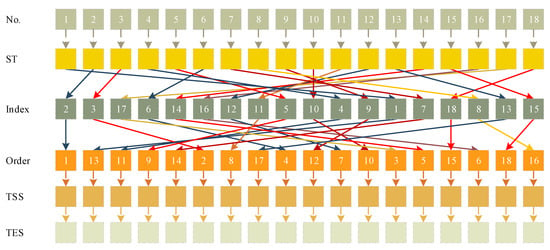
Figure 12.
Parallel coordinate graph of experimental result.
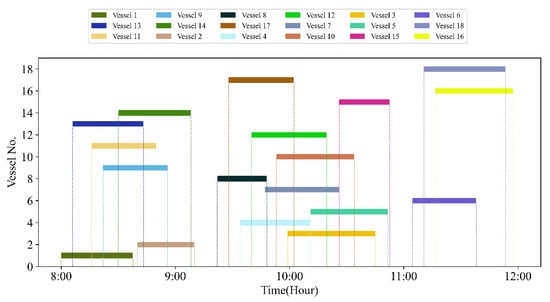
Figure 13.
Gantt diagram of the optimization result of “Inst_18_1”.
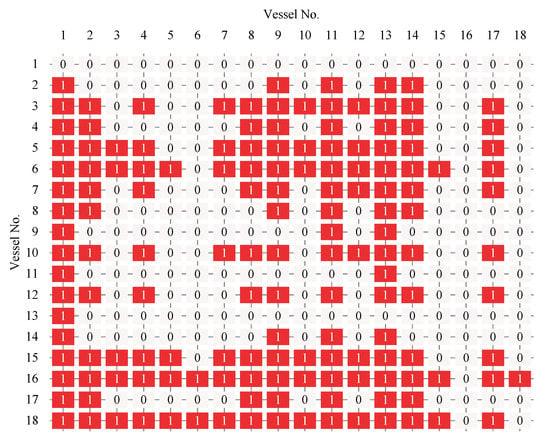
Figure 14.
The result of decision variable of instance “Inst_18_1”.
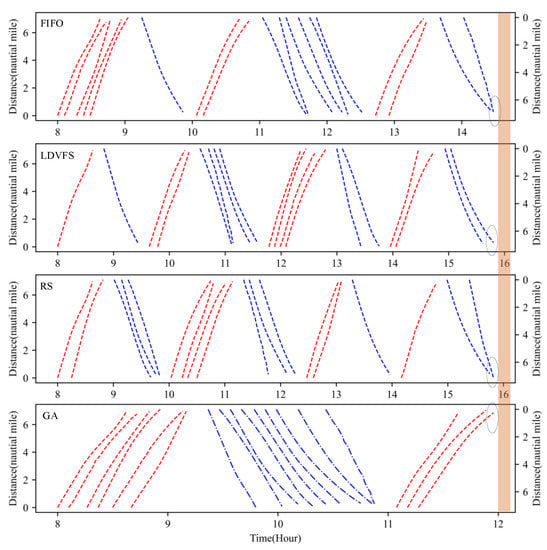
Figure 15.
Space−time trajectories of the solutions of different heuristics.
With regard to the stability of the proposed method, the comparison between different scales of instance was carried out as shown in Table 13. The proposed model was optimized by CPLEX solver, FIFO, LDVFS, RS, and GA method. The difference rate was expressed as ‘GAP’ (GAP = (near-optimal solution—exact solution)/ exact solution * 100%). Table 13 indicates that the solution obtained by the GA method has a higher quality for any scale of instances than the general scheduling method. Comparing the calculation time of the CPU in Table 12 and Table 13, it can be found that for small-scale problems, the proposed GA method is less efficient than CPLEX. However, for relatively large-scale problems, the proposed method is more efficient than CPLEX. Considering that hundreds of vessel dispatch operations should be carried out, the presented GA method will be more practical than CPLEX solver and other priority rules, and it also can reduce the waiting time of in-wharf vessels and out-wharf vessels.
Table 13.
Comparisons between CPLEX, FIFO, LDVFS, RS, and GA.
6. Conclusions and Future Work
This research aims to minimize the average waiting time of the continuous vessel scheduling problem by considering the uncertain speed of vessels. Based on this, the proposed VSP model was simplified by introducing the concept of MSTI, which integrated the multiple time constraints of the model and reduced the complexity of understanding. The problem is first modeled as a MILP model and solved by GA within reasonable execution time. Numerical experimental comparative analysis is conducted to compare both the innovation between the indeterminate velocity model and fixed velocity model and the accuracy between CPLEX solver and GA. The contributions made in this study can be summarized in the following results—it can be concluded that:
- The designed heuristic solution method has higher optimization accuracy than general priority scheduling methods such as FIFO, LDVFS, RS, etc. Besides, it can obtain the near-optimal solution for both small-scale instances and large-scale instances.
- Based on the proposed VSP model, the concept of MSTI was proposed for better understanding which reduced the number of constraints by integrating the time constraints of the proposed VSP model.
- The model built based on variable speed has obvious efficiency in optimization solutions. Compared with the fixed-speed scheduling model, it also has obvious practicality in spatio-temporal trajectory and can ensure the safety of the whole voyage.
To sum up, we revealed the safety constraint mechanism under the whole voyage in the continuous vessel scheduling model, simplified and linearized the proposed vessel model, and proposed a heuristic algorithm for improving the efficiency of optimal scheduling. This study not only can validate the advantages of the indeterminate speed model but also improve the working efficiency and provide decisions for port operators. In the future, such a method can continue to be applied to other targeted ports and waterways.
Author Contributions
Conceptualization, D.L.; methodology, D.L.; software, D.L.; validation, D.L., G.S., and K.H.; formal analysis, D.L.; investigation, D.L.; resources, G.S.; data curation, G.S.; writing—original draft preparation, D.L.; writing—review and editing, K.H.; visualization, D.L.; supervision, G.S. and K.H.; project administration, G.S.; funding acquisition, G.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research and the APC were funded by The Fundamental Research Funds for the Central Universities, grant number 3132020134, 3132020139, 3132021125.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors are grateful to the editors and reviewers for their constructive comments and suggestions. Thanks are also given for the technical support provided by the School of Navigation and Tianjin VTS Center.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Table A1.
Pseudocode of calculating the value of MSTI.
Table A1.
Pseudocode of calculating the value of MSTI.
| Pseudocode of Calculating the Value of MSTI |
|---|
Input the basic data of vessels which includes the identified number MMSI, movement type IO, length LEN, sailing time ST, and the navigable time windows NTW; the threshold of safety distance ; the index of the case ; the optimal scheduling sequence ;; the track of vessels .
|
|
Table A2.
MSTI.
Table A2.
MSTI.
| No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.000 | 0.100 | 0.183 | 0.167 | 0.183 | 0.821 | 0.117 | 0.100 | 0.821 | 0.821 | 0.821 | 0.821 | 0.821 | 0.821 | 0.100 | 0.150 | 0.821 | 0.821 |
| 2 | 0.100 | 0.000 | 0.183 | 0.167 | 0.167 | 0.827 | 0.100 | 0.100 | 0.827 | 0.827 | 0.827 | 0.827 | 0.827 | 0.827 | 0.100 | 0.150 | 0.827 | 0.827 |
| 3 | 0.100 | 0.100 | 0.000 | 0.100 | 0.100 | 0.700 | 0.100 | 0.100 | 0.700 | 0.700 | 0.700 | 0.700 | 0.700 | 0.700 | 0.100 | 0.100 | 0.700 | 0.700 |
| 4 | 0.100 | 0.100 | 0.117 | 0.000 | 0.100 | 0.765 | 0.100 | 0.100 | 0.765 | 0.765 | 0.765 | 0.765 | 0.765 | 0.765 | 0.100 | 0.100 | 0.765 | 0.765 |
| 5 | 0.100 | 0.100 | 0.100 | 0.100 | 0.000 | 0.765 | 0.100 | 0.100 | 0.765 | 0.765 | 0.765 | 0.765 | 0.765 | 0.765 | 0.100 | 0.100 | 0.765 | 0.765 |
| 6 | 0.814 | 0.814 | 0.814 | 0.814 | 0.814 | 0.000 | 0.814 | 0.814 | 0.100 | 0.100 | 0.233 | 0.117 | 0.117 | 0.100 | 0.814 | 0.814 | 0.100 | 0.200 |
| 7 | 0.100 | 0.100 | 0.167 | 0.167 | 0.167 | 0.836 | 0.000 | 0.100 | 0.836 | 0.836 | 0.836 | 0.836 | 0.836 | 0.836 | 0.100 | 0.150 | 0.836 | 0.836 |
| 8 | 0.133 | 0.150 | 0.233 | 0.217 | 0.217 | 0.880 | 0.167 | 0.000 | 0.880 | 0.880 | 0.880 | 0.880 | 0.880 | 0.880 | 0.150 | 0.200 | 0.880 | 0.880 |
| 9 | 0.858 | 0.858 | 0.858 | 0.858 | 0.858 | 0.133 | 0.858 | 0.858 | 0.000 | 0.100 | 0.250 | 0.117 | 0.133 | 0.100 | 0.858 | 0.858 | 0.100 | 0.217 |
| 10 | 0.883 | 0.883 | 0.883 | 0.883 | 0.883 | 0.200 | 0.883 | 0.883 | 0.167 | 0.000 | 0.300 | 0.183 | 0.200 | 0.117 | 0.883 | 0.883 | 0.100 | 0.267 |
| 11 | 0.633 | 0.633 | 0.633 | 0.633 | 0.633 | 0.100 | 0.633 | 0.633 | 0.100 | 0.100 | 0.000 | 0.100 | 0.100 | 0.100 | 0.633 | 0.633 | 0.100 | 0.100 |
| 12 | 0.850 | 0.850 | 0.850 | 0.850 | 0.850 | 0.167 | 0.850 | 0.850 | 0.117 | 0.100 | 0.267 | 0.000 | 0.167 | 0.100 | 0.850 | 0.850 | 0.100 | 0.233 |
| 13 | 0.770 | 0.770 | 0.770 | 0.770 | 0.770 | 0.100 | 0.770 | 0.770 | 0.100 | 0.100 | 0.200 | 0.117 | 0.000 | 0.100 | 0.770 | 0.770 | 0.100 | 0.150 |
| 14 | 0.878 | 0.878 | 0.878 | 0.878 | 0.878 | 0.183 | 0.878 | 0.878 | 0.150 | 0.117 | 0.300 | 0.167 | 0.183 | 0.000 | 0.878 | 0.878 | 0.100 | 0.250 |
| 15 | 0.133 | 0.150 | 0.233 | 0.217 | 0.233 | 0.914 | 0.167 | 0.100 | 0.914 | 0.914 | 0.914 | 0.914 | 0.914 | 0.914 | 0.000 | 0.200 | 0.914 | 0.914 |
| 16 | 0.100 | 0.100 | 0.117 | 0.100 | 0.117 | 0.759 | 0.100 | 0.100 | 0.759 | 0.759 | 0.759 | 0.759 | 0.759 | 0.759 | 0.100 | 0.000 | 0.759 | 0.759 |
| 17 | 0.967 | 0.967 | 0.967 | 0.967 | 0.967 | 0.283 | 0.967 | 0.967 | 0.250 | 0.217 | 0.400 | 0.267 | 0.283 | 0.200 | 0.967 | 0.967 | 0.000 | 0.350 |
| 18 | 0.642 | 0.642 | 0.642 | 0.642 | 0.642 | 0.100 | 0.642 | 0.642 | 0.100 | 0.100 | 0.100 | 0.100 | 0.100 | 0.100 | 0.642 | 0.642 | 0.100 | 0.000 |
References
- Elisabeth, G.; Lübbecke, M.E.; Möhring, R.H. Ship traffic optimization for the Kiel canal. In Proceedings of the TRISTAN VII, Tromsø, Norway, 20–25 June 2010; Volume 104, pp. 1–4. [Google Scholar]
- Elisabeth, G.; Lübbecke, M.E.; Möhring, R.H. Challenges in scheduling when planning the ship traffic on the kiel canal. In Proceedings of the Eraerts, Nymburk, Czech Republic, 19–24 June 2011; Volume 23, pp. 23–25. [Google Scholar]
- Lübbecke, E.; Lübbecke, M.E.; Rolf, H.M. Ship traffic optimization for the Kiel Canal. Oper. Res. 2019, 67, 791–812. [Google Scholar] [CrossRef]
- Meisel, F.; Fagerholt, K. Scheduling two-way ship traffic for the Kiel Canal: Model, extensions and a matheuristic. Comput. Oper. Res. 2019, 106, 119–132. [Google Scholar] [CrossRef]
- Skjæveland, G.; Hilstad, K.V. Ship Traffic Scheduling and Disruption Management for the Kiel Canal-A Simulation-Optimization Approach. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norwegian, 2018. [Google Scholar]
- Andersen, T.; Hove, J.H.; Fagerholt, K.; Meisel, F. Scheduling ships with uncertain arrival times through the Kiel Canal. Mar. Transport. Res. 2021, 2, 1–17. [Google Scholar]
- Muñuzuri, J.; Barbadilla, E.; Escudero-Santana, A.; Onieva, L. Planning navigation in inland waterways with tidal depth restrictions. J. Navig. 2018, 71, 547–564. [Google Scholar] [CrossRef]
- Kelareva, E.; Brand, S.; Kilby, P.; Thiébaux, S.; Wallace, M. CP and MIP methods for ship scheduling with time-varying draft. In Proceedings of the International Conference on Automated Planning and Scheduling, Sao Paulo, Brazil, 25–29 June 2012; Volume 22, pp. 110–118. [Google Scholar]
- Zhang, B.; Zheng, Z. Model and Algorithm for Vessel Scheduling through a One-Way Tidal Channel. J. Waterw Port. Coast. Ocean. Eng. 2020, 146, 1–8. [Google Scholar] [CrossRef]
- Zhang, B.; Zheng, Z. Model and algorithm for vessel scheduling optimisation through the compound channel with the consideration of tide height. Int. J. Shipp. Transport. Logist. 2021, 13, 445–461. [Google Scholar] [CrossRef]
- Chen, Z.L.; Lei, L.; Zhong, H. Container vessel scheduling with bi-directional flows. Oper. Res. Lett. 2007, 35, 186–194. [Google Scholar] [CrossRef]
- Jia, S.; Li, C.L.; Xu, Z. Managing navigation channel traffic and anchorage area utilization of a container port. Transport. Sci. 2019, 53, 728–745. [Google Scholar] [CrossRef]
- Jia, S.; Wu, L.; Meng, Q. Joint scheduling of vessel traffic and pilots in seaport waters. Transport. Sci. 2020, 54, 1495–1515. [Google Scholar] [CrossRef]
- Guo, Z.; Cao, Z.; Wang, W.; Jiang, Y.; Xu, X.; Feng, P. An integrated model for vessel traffic and deballasting scheduling in coal export terminals. Transport. Res. E-Log. 2021, 152, 1–23. [Google Scholar] [CrossRef]
- Zhang, X.; Lin, J.; Guo, Z.; Liu, T. Vessel transportation scheduling optimization based on channel–berth coordination. Ocean. Eng. 2016, 112, 145–152. [Google Scholar] [CrossRef]
- Liu, B.; Li, Z.C.; Sheng, D.; Wang, Y. Integrated planning of berth allocation and vessel sequencing in a seaport with one-way navigation channel. Transport. Res. B-Meth. 2021, 143, 23–47. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, X.; Ji, M.; Yao, S. Vessel scheduling model of a one-way port channel. J. Waterw. Port. Coast. Ocean. Eng. 2017, 143, 1–11. [Google Scholar] [CrossRef]
- Zhang, X.; Li, R.; Chen, X.; Li, J.; Wang, C. Multi-object-based Vessel Traffic Scheduling Optimisation in a Compound Waterway of a Large Harbour. J. Navig. 2019, 72, 609–627. [Google Scholar] [CrossRef]
- Lalla-Ruiz, E.; Shi, X.; Voß, S. The waterway ship scheduling problem. Transport. Res. D-Tr. E. 2018, 60, 191–209. [Google Scholar] [CrossRef]
- Hill, A.; Lalla-Ruiz, E.; Voß, S.; Goycoolea, M. A multi-mode resource-constrained project scheduling reformulation for the waterway ship scheduling problem. J. Sched. 2019, 22, 173–182. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X.; Yang, B.; Wang, N. Vessel traffic scheduling optimization for restricted channel in ports. Comput. Ind. Eng. 2021, 152, 1–13. [Google Scholar] [CrossRef]
- Dulebenets, M.A. A comprehensive multi-objective optimization model for the vessel scheduling problem in liner shipping. Int. J. Prod. Econ. 2018, 196, 293–318. [Google Scholar] [CrossRef]
- Dulebenets, M.A.; Pasha, J.; Abioye, O.F.; Kavoosi, M. Vessel scheduling in liner shipping: A critical literature review and future research needs. Flex. Serv. Manuf. J. 2021, 33, 43–106. [Google Scholar] [CrossRef]
- Kang, L.; Meng, Q.; Tan, K.C. Tugboat scheduling under ship arrival and tugging process time uncertainty. Transport. Res. E-Log. 2020, 144, 1–15. [Google Scholar] [CrossRef]
- Ulusçu, Ö.S.; Altiok, T. Waiting time approximation in single-class queueing systems with multiple types of interruptions: Modeling congestion at waterways entrances. Ann. Oper. Res. 2009, 172, 291–313. [Google Scholar] [CrossRef]
- Ulusçu, Ö.S.; Altiok, T. Waiting time approximation in multi-class queueing systems with multiple types of class-dependent interruptions. Ann. Oper. Res. 2013, 202, 185–195. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Zhu, M.; Kaku, I.; Chen, G.; Wang, M. An improved discrete pso for tugboat assignment problem under a hybrid scheduling rule in container terminal. Math. Probl. Eng. 2014, 2014, 1–10. [Google Scholar] [CrossRef]
- Wei, X.; Jia, S.; Meng, Q.; Tan, K.C. Tugboat scheduling for container ports. Transport. Res. E-Log. 2020, 142, 102071. [Google Scholar] [CrossRef]
- Wu, L.; Jia, S.; Wang, S. Pilotage planning in seaports. Eur. J. Oper. Res. 2020, 287, 90–105. [Google Scholar] [CrossRef]
- Xu, Q.; Mao, J.; Jin, Z. Simulated annealing-based ant colony algorithm for tugboat scheduling optimization. Math. Probl. Eng. 2012, 2012, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Abou Kasm, O.; Diabat, A.; Bierlaire, M. Vessel scheduling with pilotage and tugging considerations. Transport. Res. E-Log. 2021, 148, 1–24. [Google Scholar] [CrossRef]
- Li, S.; Jia, S. The seaport traffic scheduling problem: Formulations and a column-row generation algorithm. Transport. Res. B-Meth. 2019, 128, 158–184. [Google Scholar] [CrossRef]
- Bertsimas, D.; Gupta, V.; Kallus, N. Data-driven robust optimization. Math. Program. 2018, 167, 235–292. [Google Scholar] [CrossRef] [Green Version]
- International Maritime Organization, Resolution, A.857: Guidelines for vessel traffic services, 1997, Volume 15. Available online: http://rise.odessa.ua/texts/A857_20e.php3 (accessed on 13 August 2021).
- Panwalkar, S.S.; Iskander, W. A survey of scheduling rules. Oper. Res. 1977, 25, 45–61. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).