Evaluation of Several Feature Detectors/Extractors on Underwater Images towards vSLAM

Abstract
1. Introduction
1.1. Related Work
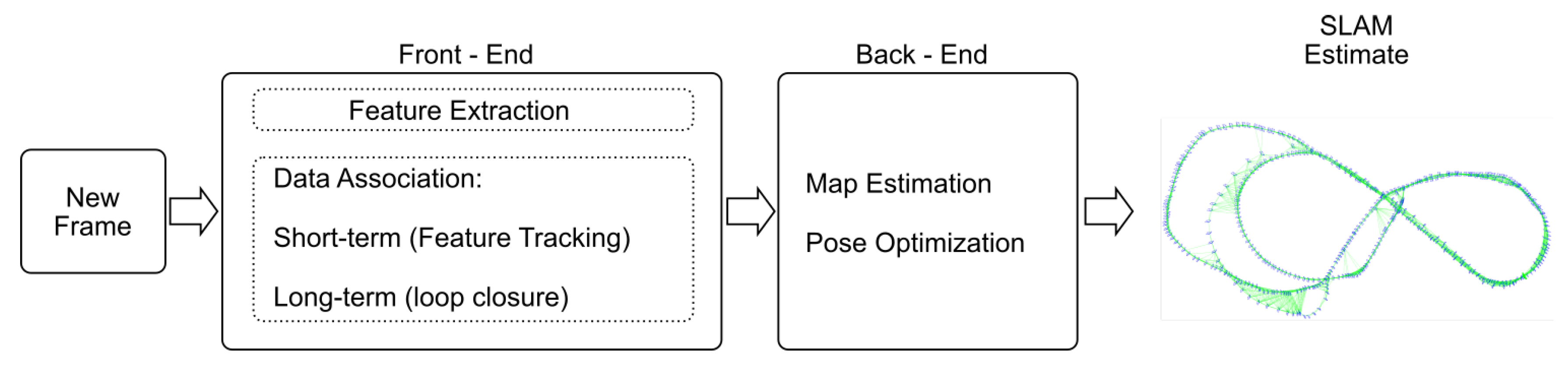
1.2. Feature Detectors in Visual SLAM
1.3. Feature Detectors Evaluation
2. Selected Feature Detectors and Descriptors
2.1. Scale Invariant Feature Transform (SIFT)
2.2. Speeded-Up Robust Features (SURF)
2.3. Oriented FAST and Rotated BRIEF (ORB)
2.4. Binary Robust Invariant Scalable Keypoints (BRISK)
2.5. Accelerated-KAZE (AKAZE)
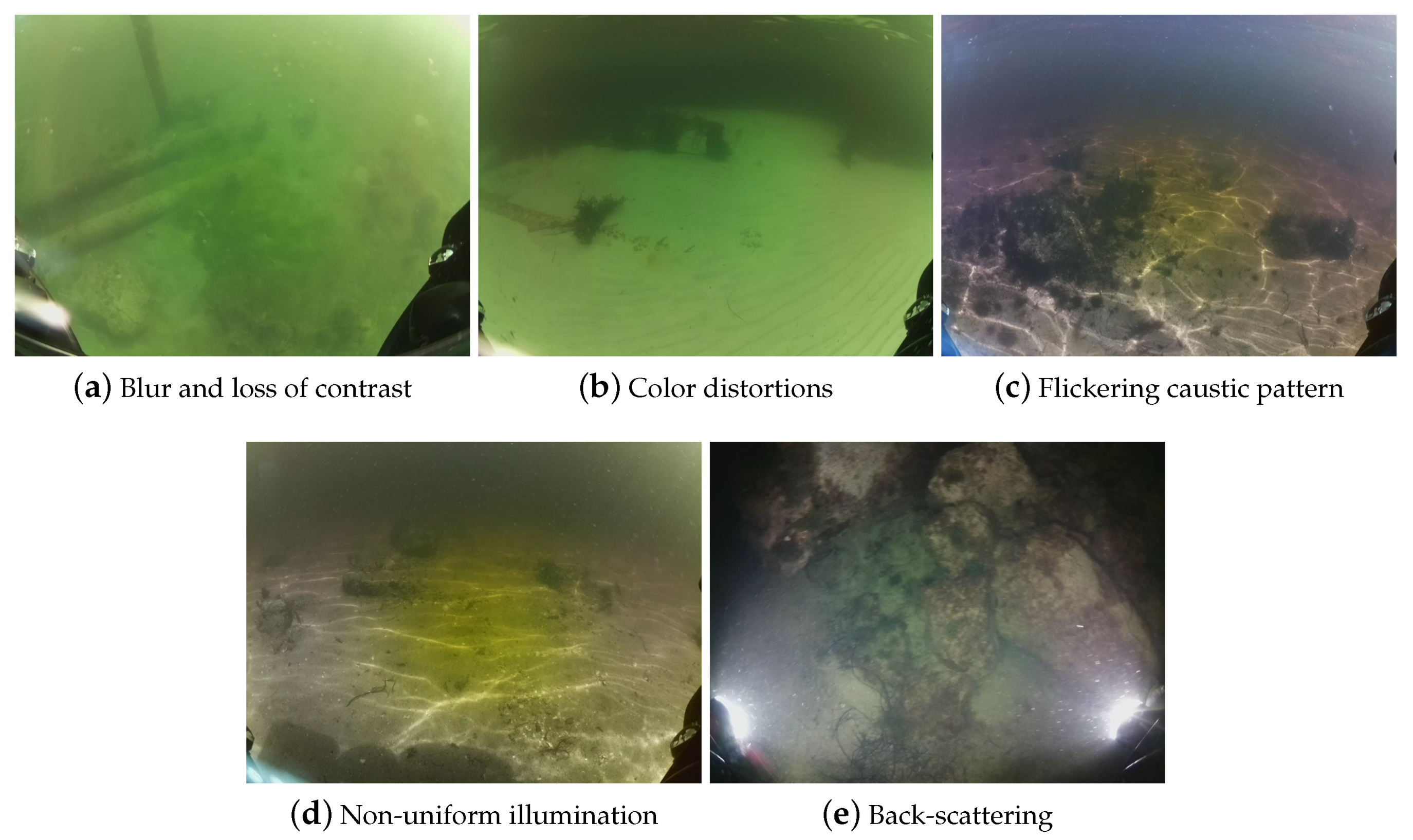
3. Underwater Monocular Images
Underwater Image Enhancement
4. Evaluation Framework
4.1. Detectable Features in Underwater Images
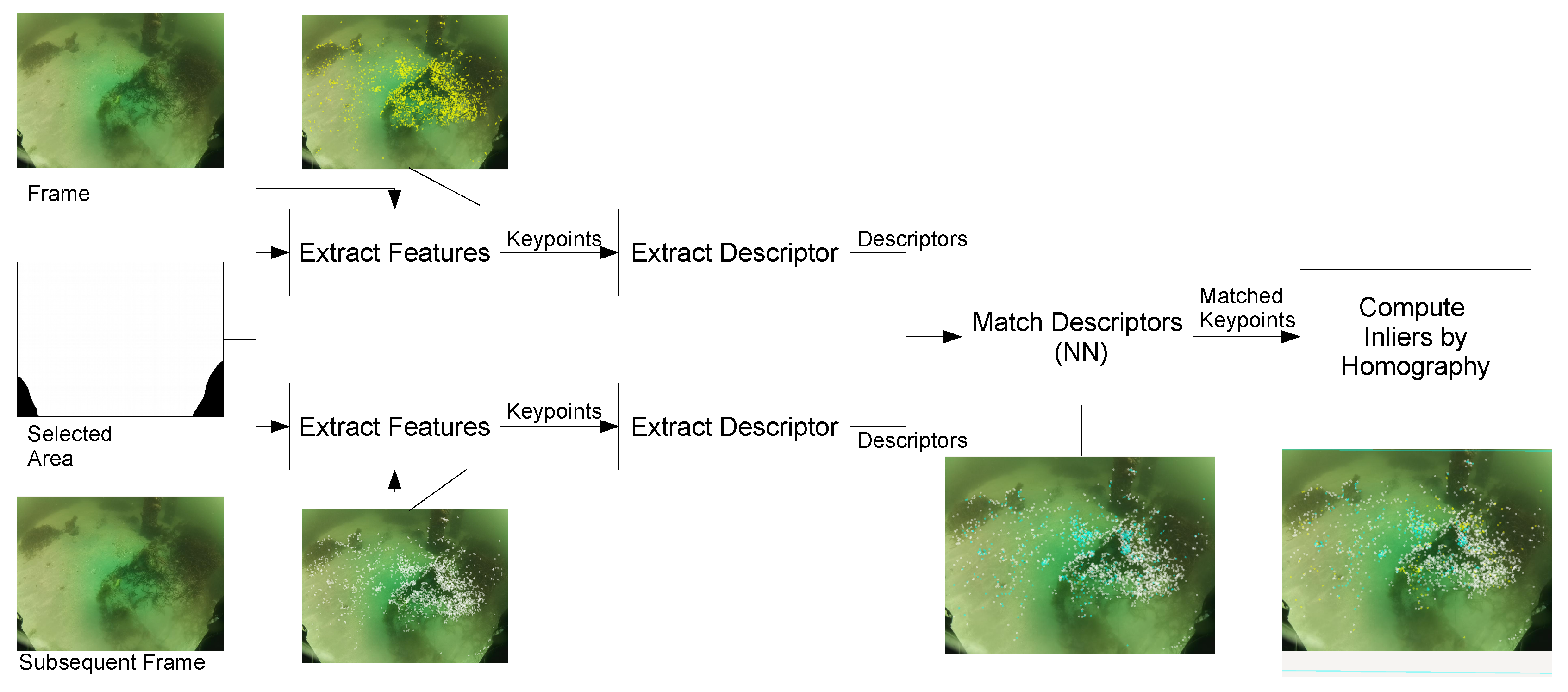
4.2. Frame Sequence Matching
4.3. Datasets
4.4. Experimental Setup
5. Results and Discussion
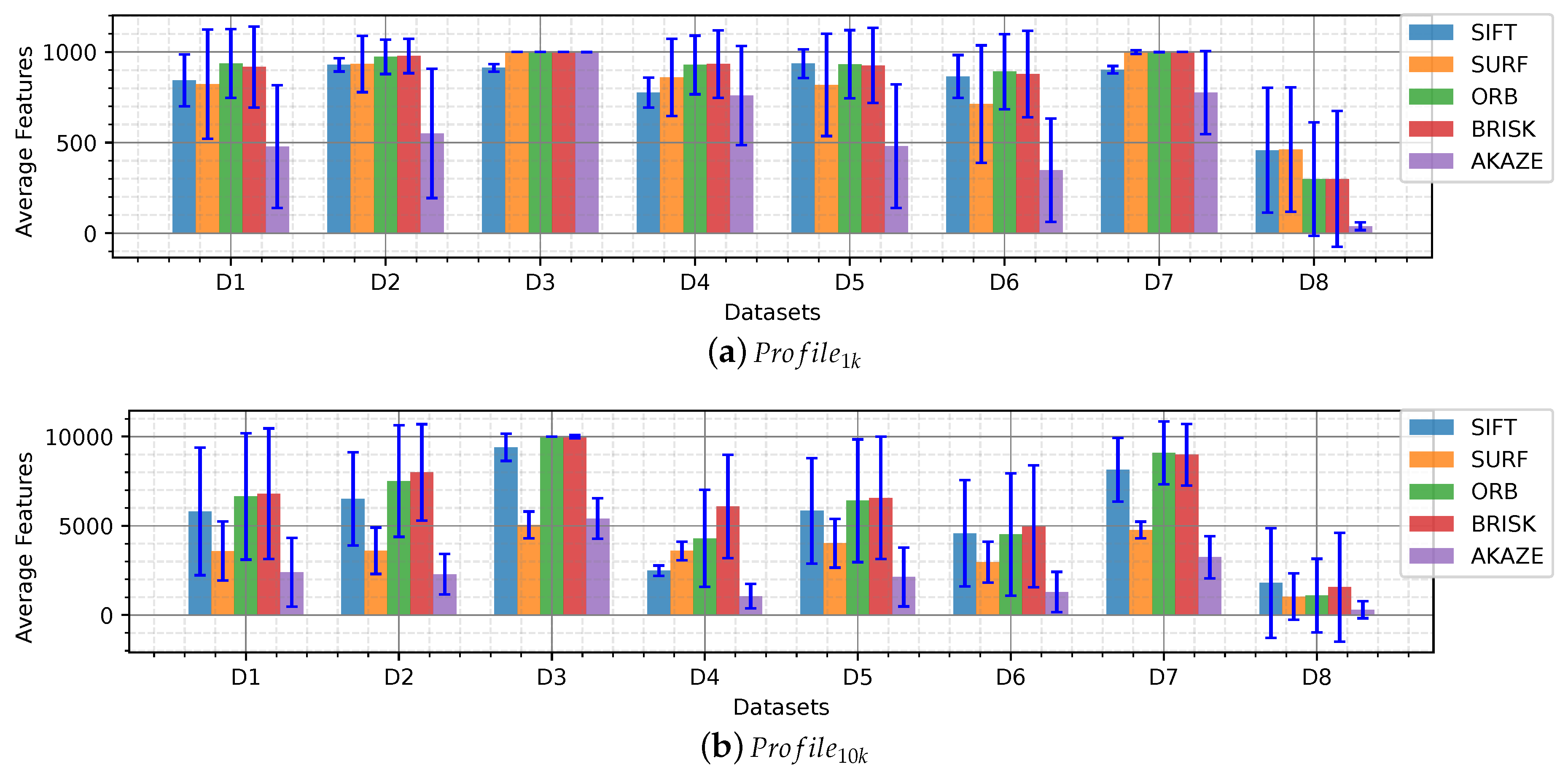
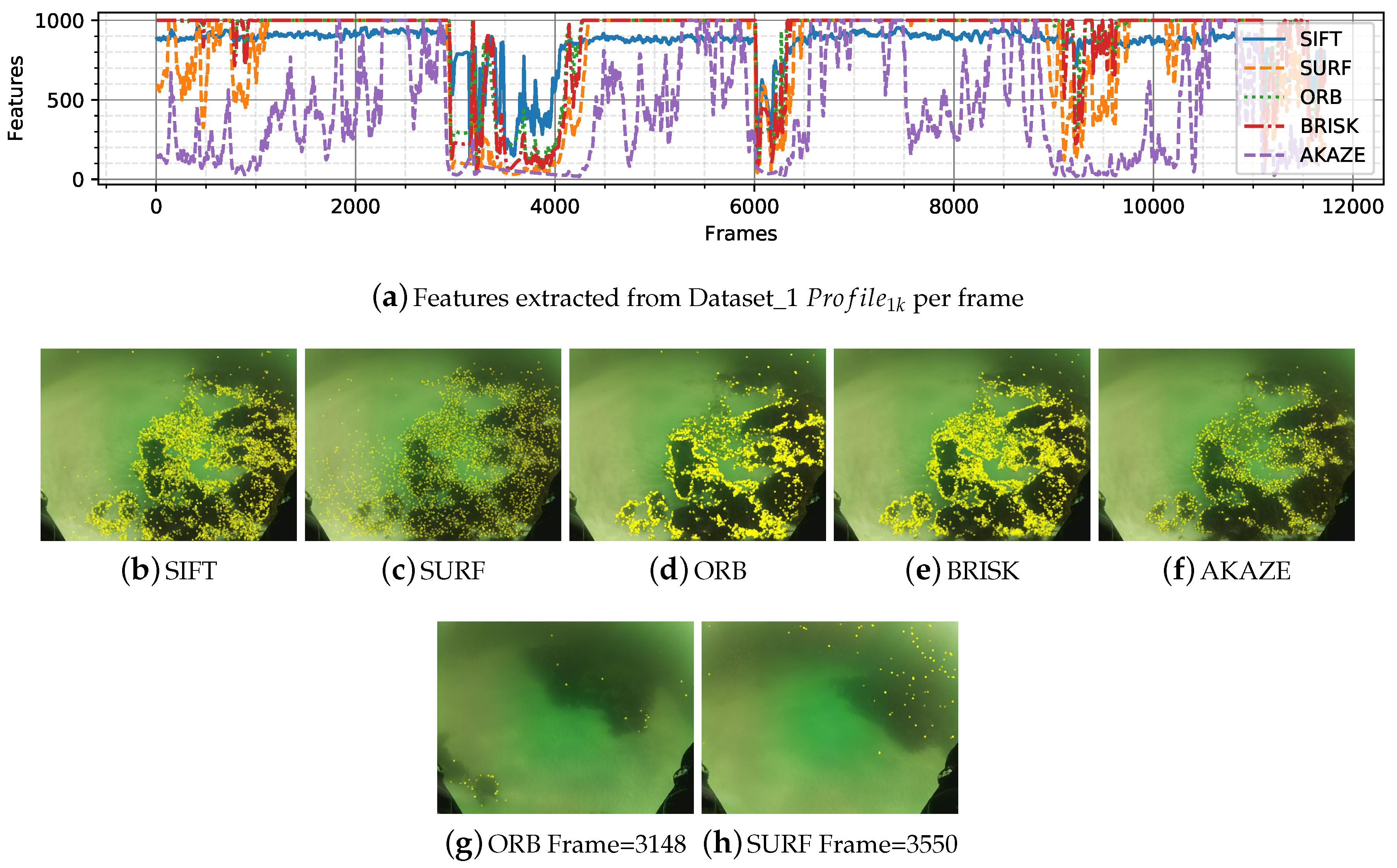
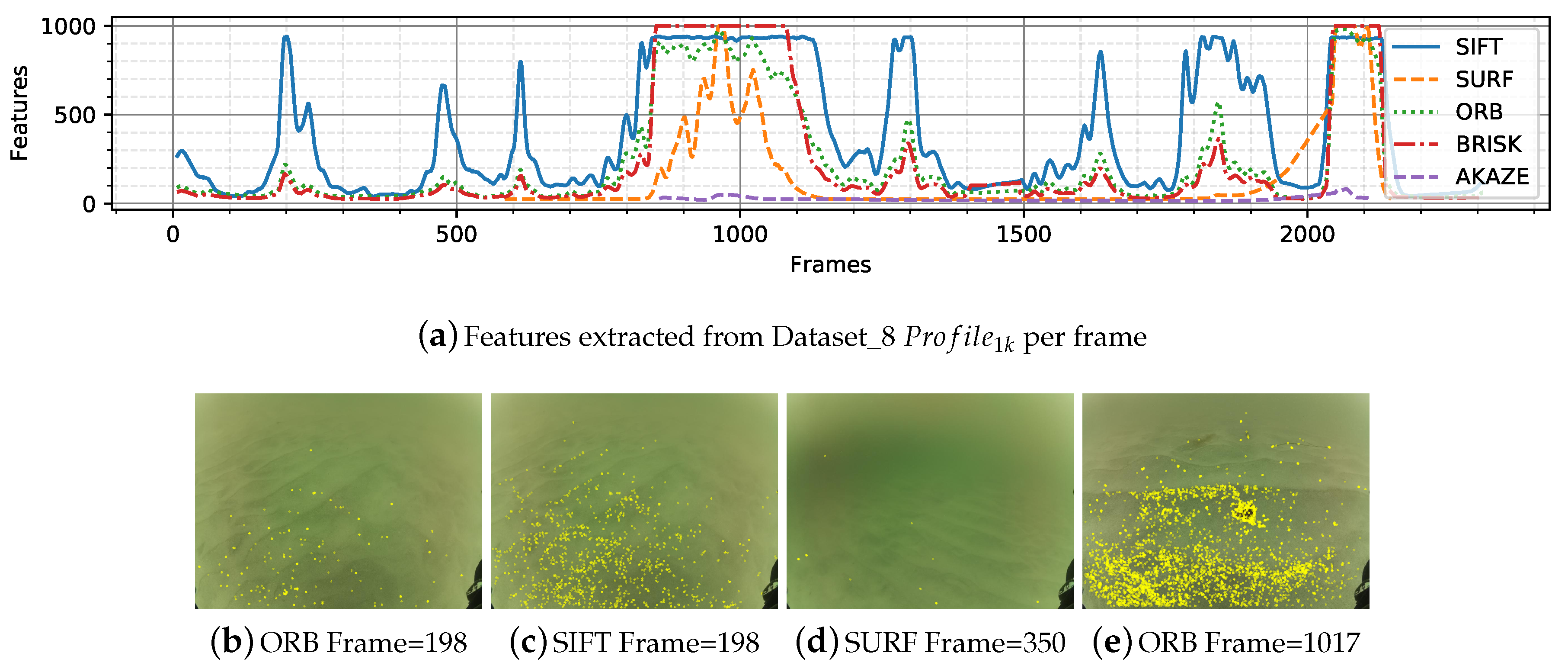
5.1. Detectable Features in Underwater Images
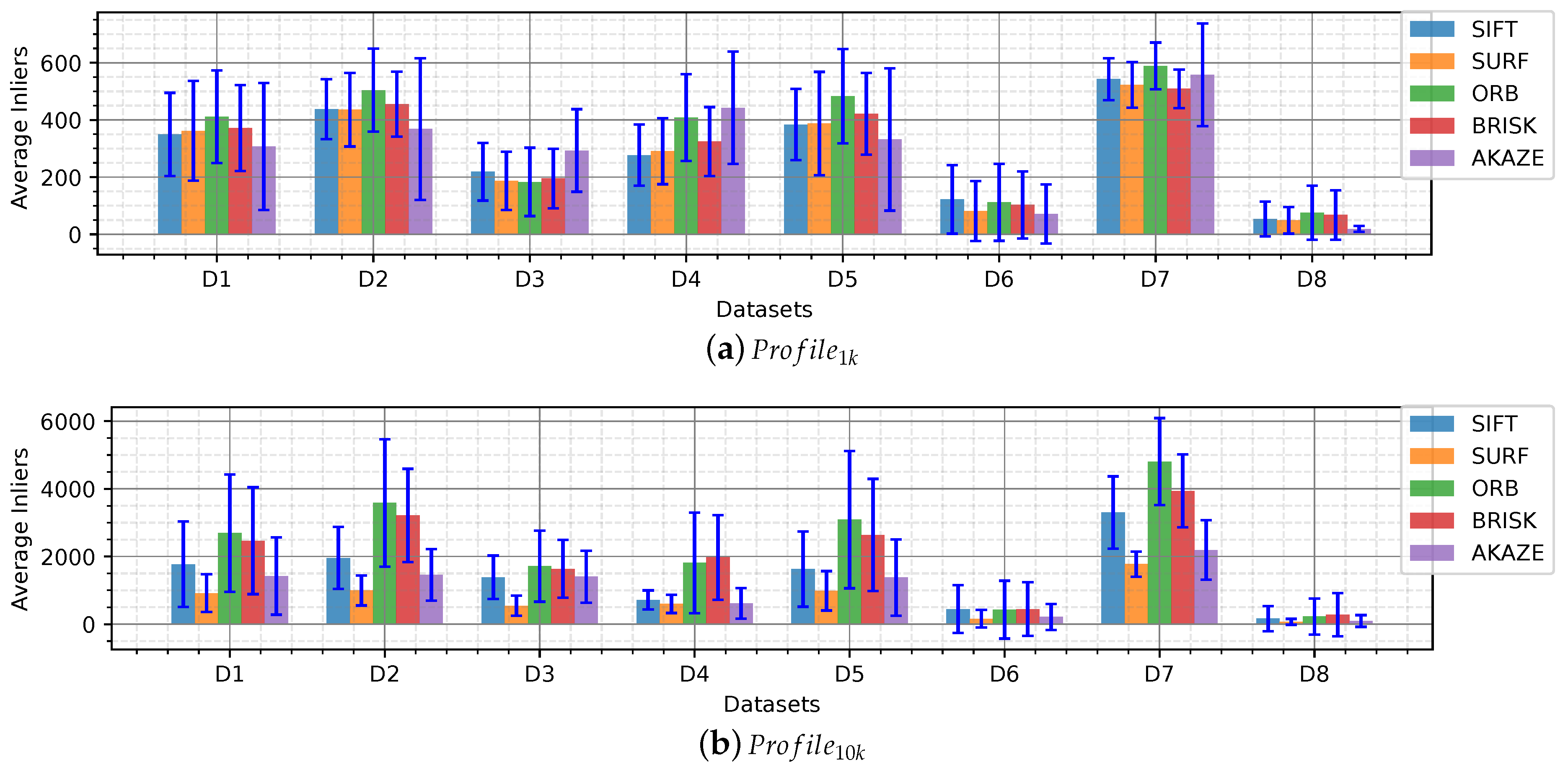
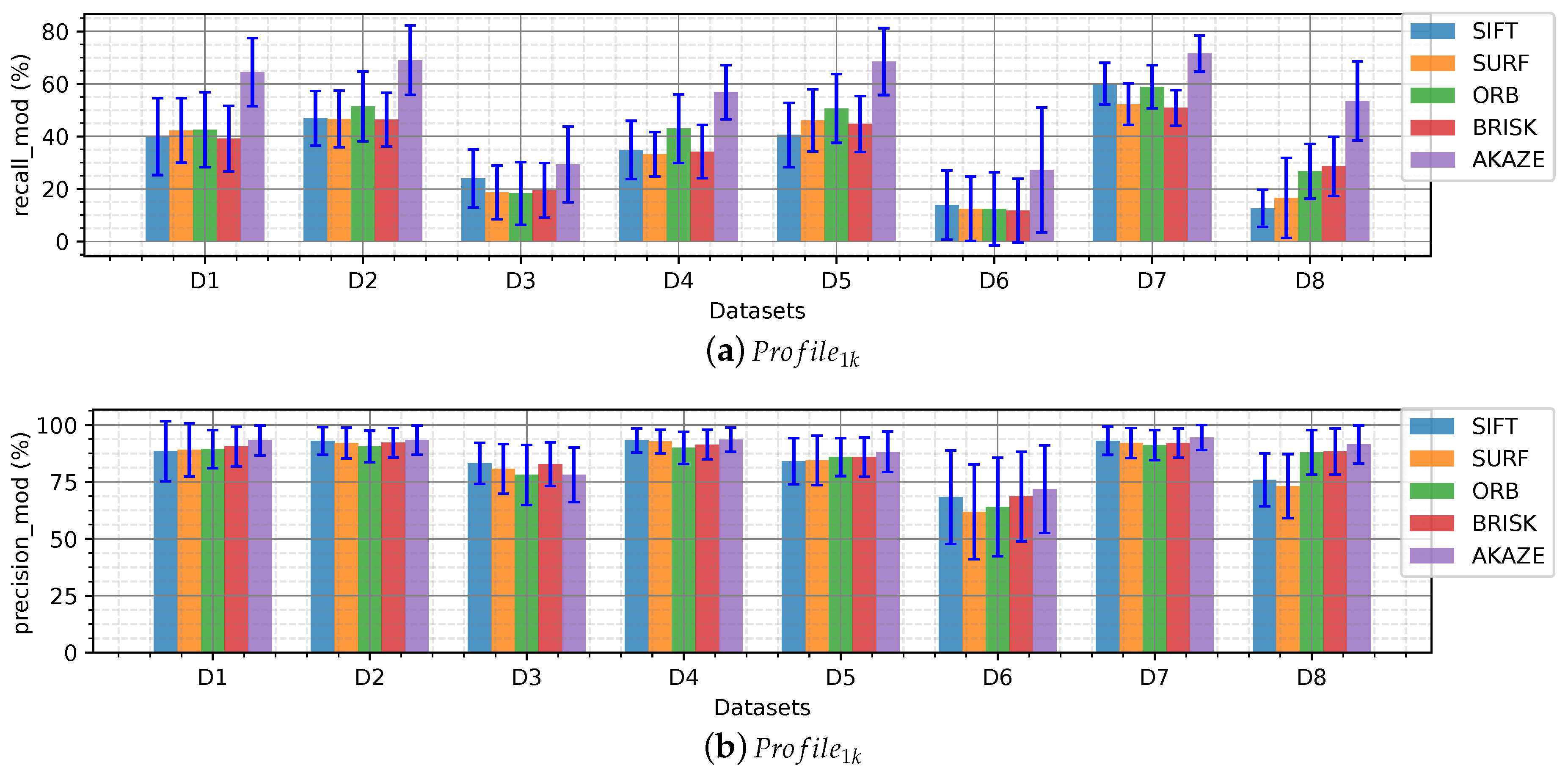
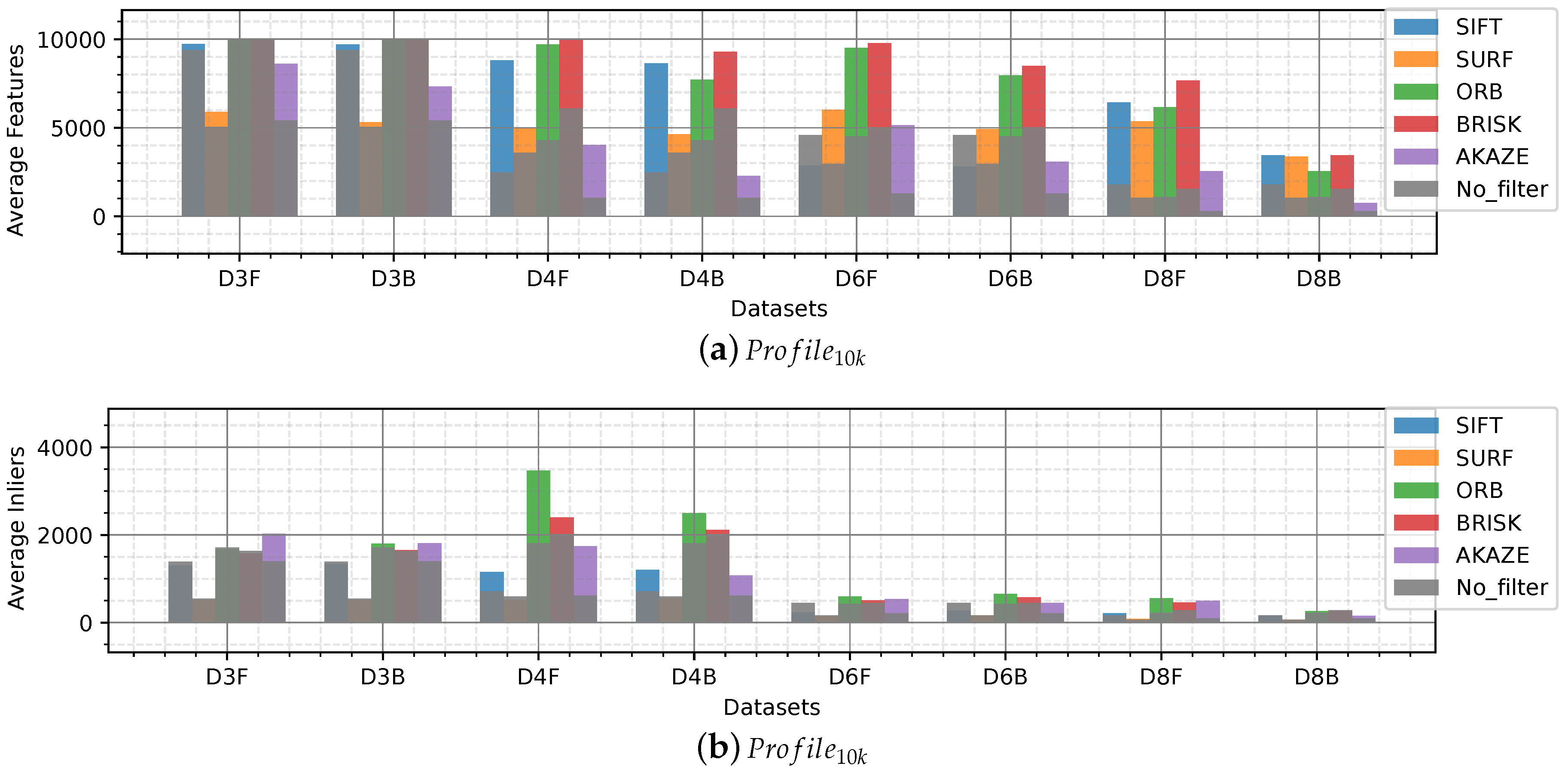
5.2. Frame Sequence Matching
5.3. Image Enhancement
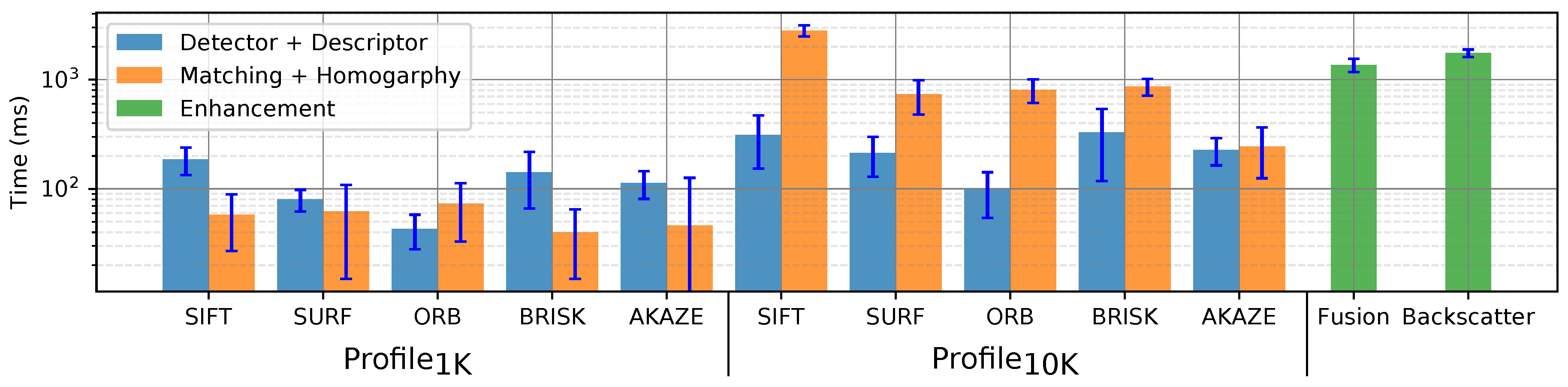
5.4. Processing Time
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| SLAM | Simultaneous Localization and Mapping |
| vSLAM | Visual SLAM |
| SLAM | Simultaneous Localization and Mapping |
| vSLAM | Visual SLAM |
| SIFT | Scale Invariant Feature Transform |
| SURF | Speeded-Up Robust Features |
| BRIEF | Binary Robust Independent Elementary Features |
| ORB | Oriented FAST and Rotated BRIEF |
| BRISK | Binary Robust Invariant Scalable Keypoints |
| AKAZE | Accelerated-KAZE |
References
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV Navigation and Localization: A Review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Younes, G.; Asmar, D.; Shammas, E.; Zelek, J. Keyframe-Based Monocular SLAM: Design, Survey, and Future Directions. Robot. Auton. Syst. 2017, 98, 67–88. [Google Scholar] [CrossRef]
- Gil, A.; Mozos, O.M.; Ballesta, M.; Reinoso, O. A Comparative Evaluation of Interest Point Detectors and Local Descriptors for Visual SLAM. Mach. Vis. Appl. 2010, 21, 905–920. [Google Scholar] [CrossRef]
- Tareen, S.A.K.; Saleem, Z. A Comparative Analysis of SIFT, SURF, KAZE, AKAZE, ORB, and BRISK. In Proceedings of the 2018 International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 3–4 March 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Işık, Ş. A Comparative Evaluation of Well-Known Feature Detectors and Descriptors. Int. J. Appl. Math. Electron. Comput. 2014, 3, 1. [Google Scholar] [CrossRef]
- Fuentes-Pacheco, J.; Ruiz-Ascencio, J.; Rendón-Mancha, J.M. Visual Simultaneous Localization and Mapping: A Survey. Artif. Intell. Rev. 2015, 43, 55–81. [Google Scholar] [CrossRef]
- Klippenstein, J.; Zhang, H. Performance Evaluation of Visual SLAM Using Several Feature Extractors. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009; pp. 1574–1581. [Google Scholar] [CrossRef]
- Aulinas, J.; Carreras, M.; Llado, X.; Salvi, J.; Garcia, R.; Prados, R.; Petillot, Y.R. Feature Extraction for Underwater Visual SLAM. In Proceedings of the OCEANS 2011 IEEE-Spain, Santander, Spain, 6–9 June 2011; pp. 1–7. [Google Scholar] [CrossRef]
- Meireles, M.; Lourenço, R.; Dias, A.; Almeida, J.M.; Silva, H.; Martins, A. Real Time Visual SLAM for Underwater Robotic Inspection. In Proceedings of the 2014 Oceans-St. John’s, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Burguera, A.; Bonin-Font, F.; Oliver, G. Towards Robust Image Registration for Underwater Visual Slam. In Proceedings of the International Conference on Computer Vision, Theory and Applications (VISSAP), Lisbon, Portugal, 5–8 January 2014; pp. 539–544. [Google Scholar] [CrossRef]
- Iqbal, K.; Salam, R.A.; Osman, A.; Talib, A.Z. Underwater Image Enhancement Using an Integrated Colour Model. IAENG Int. J. Comput. Sci. 2007, 34. [Google Scholar]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Huletski, A.; Kartashov, D.; Krinkin, K. Evaluation of the Modern Visual SLAM Methods. In Proceedings of the 2015 Artificial Intelligence and Natural Language and Information Extraction, Social Media and Web Search FRUCT Conference (AINL-ISMW FRUCT), St. Petersburg, Russia, 9–14 November 2015; pp. 19–25. [Google Scholar] [CrossRef]
- Quattrini Li, A.; Coskun, A.; Doherty, S.M.; Ghasemlou, S.; Jagtap, A.S.; Modasshir, M.; Rahman, S.; Singh, A.; Xanthidis, M.; O’Kane, J.M.; et al. Experimental Comparison of Open Source Vision-Based State Estimation Algorithms. In 2016 International Symposium on Experimental Robotics; Kulić, D., Nakamura, Y., Khatib, O., Venture, G., Eds.; Springer: Cham, Switzerland, 2017; Volume 1, pp. 775–786. [Google Scholar] [CrossRef]
- Mikolajczyk, K.; Schmid, C. A Performance Evaluation of Local Descriptors. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1615–1630. [Google Scholar] [CrossRef] [PubMed]
- Ke, Y.; Sukthankar, R. PCA-SIFT: A More Distinctive Representation for Local Image Descriptors. In Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2004), Washington, DC, USA, 27 June–2 July 2004; Volume 2, pp. II-506–II-513. [Google Scholar] [CrossRef]
- Johansson, J.; Solli, M.; Maki, A. An Evaluation of Local Feature Detectors and Descriptors for Infrared Images. In European Conference on Computer Vision; Springer: Amsterdam, The Netherlands, 2016; pp. 711–723. [Google Scholar]
- Pieropan, A.; Björkman, M.; Bergström, N.; Kragic, D. Feature Descriptors for Tracking by Detection: A Benchmark. arXiv 2016, arXiv:cs/1607.06178. [Google Scholar]
- Qu, X.; Soheilian, B.; Habets, E.; Paparoditis, N. Evaluation of SIFT and SURF for Vision Based Localization. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B3, 685–692. [Google Scholar] [CrossRef]
- Lowe, D.G. Object Recognition from Local Scale-Invariant Features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; Volume 2, pp. 1150–1157. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. SURF: Speeded Up Robust Features. In Computer Vision—ECCV 2006; Leonardis, A., Bischof, H., Pinz, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 404–417. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An Efficient Alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar] [CrossRef]
- Alcantarilla, P.F.; Solutions, T. Fast Explicit Diffusion for Accelerated Features in Nonlinear Scale Spaces. IEEE Trans. Pattern Anal. Mach. Intell. (TPAMI) 2011, 34, 1281–1298. [Google Scholar]
- Leutenegger, S.; Chli, M.; Siegwart, R.Y. BRISK: Binary Robust Invariant Scalable Keypoints. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2548–2555. [Google Scholar] [CrossRef]
- Khan, N.Y.; McCane, B.; Wyvill, G. SIFT and SURF Performance Evaluation against Various Image Deformations on Benchmark Dataset. In Proceedings of the 2011 International Conference on Digital Image Computing: Techniques and Applications, Noosa, QLD, Australia, 6–8 December 2011; pp. 501–506. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Viola, P.; Jones, M. Rapid Object Detection Using a Boosted Cascade of Simple Features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2001), Kauai, HI, USA, 8–14 December 2001; Volume 1, pp. I-511–I-518. [Google Scholar] [CrossRef]
- Ghosh, S.; Ray, R.; Vadali, S.R.K.; Shome, S.N.; Nandy, S. Reliable Pose Estimation of Underwater Dock Using Single Camera: A Scene Invariant Approach. Mach. Vis. Appl. 2016, 27, 221–236. [Google Scholar] [CrossRef]
- Trabes, E.; Jordan, M.A. Self-Tuning of a Sunlight-Deflickering Filter for Moving Scenes Underwater. In Proceedings of the 2015 XVI Workshop on Information Processing and Control (RPIC), Cordoba, Argentina, 6–9 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Tsiotsios, C.; Angelopoulou, M.E.; Davison, A.J.; Kim, T.K. Effective Backscatter Approximation for Photometry in Murky Water. arXiv 2016, arXiv:cs/1604.08789. [Google Scholar]
- Wang, R.; Wang, Y.; Zhang, J.; Fu, X. Review on Underwater Image Restoration and Enhancement Algorithms. In Proceedings of the 7th International Conference on Internet Multimedia Computing and Service, ICIMCS ’15, Zhangjiajie, China, 19–21 August 2015; ACM: New York, NY, USA, 2015; pp. 56:1–56:6. [Google Scholar] [CrossRef]
- Gracias, N.; Negahdaripour, S.; Neumann, L.; Prados, R.; Garcia, R. A Motion Compensated Filtering Approach to Remove Sunlight Flicker in Shallow Water Images. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–7. [Google Scholar] [CrossRef]
- Dai, Z.; Wang, X.; Yang, J. Approach to Sunflicker Removal for Underwater Image. J. Electron. Imaging 2015, 24, 061206. [Google Scholar] [CrossRef]
- Shihavuddin, A.; Gracias, N.; Garcia, R. Online Sunflicker Removal Using Dynamic Texture Prediction. In Proceedings of the VISAPP 2012 International Conference on Computer Vision Theory and Applications, Rome, Italy, 24–26 February 2012; Volume 1. [Google Scholar]
- Zhang, H.; Chau, L.P. Removing Backscatter to Enhance the Visibility of Underwater Object. Master’s Thesis, Nanyang Technological University, Singapore, 2016. [Google Scholar]
- Qu, C.; Bi, D.Y.; Sui, P.; Chao, A.N.; Wang, Y.F. Robust Dehaze Algorithm for Degraded Image of CMOS Image Sensors. Sensors 2017, 17, 2175. [Google Scholar] [CrossRef] [PubMed]
- He, R.; Wang, Z.; Xiong, H.; Feng, D.D. Single Image Dehazing with White Balance Correction and Image Decomposition. In Proceedings of the 2012 International Conference on Digital Image Computing Techniques and Applications (DICTA), Fremantle, WA, Australia, 3–5 December 2012; pp. 1–7. [Google Scholar] [CrossRef]
- Kim, J.H.; Jang, W.D.; Sim, J.Y.; Kim, C.S. Optimized Contrast Enhancement for Real-Time Image and Video Dehazing. J. Vis. Commun. Image Represent. 2013, 24, 410–425. [Google Scholar] [CrossRef]
- Ding, X.; Wang, Y.; Zhang, J.; Fu, X. Underwater Image Dehaze Using Scene Depth Estimation with Adaptive Color Correction. In Proceedings of the OCEANS 2017—Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Huang, Z.; Wan, L.; Sheng, M.; Zou, J.; Song, J. An Underwater Image Enhancement Method for Simultaneous Localization and Mapping of Autonomous Underwater Vehicle. In Proceedings of the 2019 3rd International Conference on Robotics and Automation Sciences (ICRAS), Wuhan, China, 1–3 June 2019; pp. 137–142. [Google Scholar]
- Treibitz, T.; Schechner, Y.Y. Active Polarization Descattering. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 385–399. [Google Scholar] [CrossRef] [PubMed]
- Treibitz, T.; Schechner, Y.Y. Instant 3Descatter. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; Volume 2, pp. 1861–1868. [Google Scholar] [CrossRef]
- Murez, Z.; Treibitz, T.; Ramamoorthi, R.; Kriegman, D.J. Photometric Stereo in a Scattering Medium. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1880–1891. [Google Scholar] [CrossRef] [PubMed]
- Ancuti, C.; Ancuti, C.O.; Haber, T.; Bekaert, P. Enhancing Underwater Images and Videos by Fusion. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, (CVPR2012), Providence, RI, USA, 16–21 June 2012; pp. 81–88. [Google Scholar] [CrossRef]
- Se, S.; Lowe, D.; Little, J. Vision-Based Mobile Robot Localization and Mapping Using Scale-Invariant Features, In Proceedings of the 2001 ICRA, IEEE International Conference on Robotics and Automation (Cat. No.01CH37164), Seoul, Korea, 21–26 May 2001; Volume 2, pp. 2051–2058. [Google Scholar] [CrossRef]
- Miro, J.V.; Zhou, W.; Dissanayake, G. Towards Vision Based Navigation in Large Indoor Environments. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 2096–2102. [Google Scholar] [CrossRef]
- Bradski, G. The OpenCV Library. 2000. Available online: http://www.drdobbs.com/open-source/the-opencv-library/184404319 (accessed on 29 May 2020).
- Labbé, M. Find-Object. 2011. Available online: http://introlab.github.io/find-object (accessed on 29 May 2020).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detector/Descriptor | Features to Detect | Size of Descriptor | Parameters |
|---|---|---|---|
| SIFT | Blobs | 128 Bytes | Contrast Theshold, Sigma |
| SURF | Blobs | 128 Float | Hessian Threshold |
| ORB | Corners | 32 Bytes | Fast Threshold, Max Features |
| BRISK | Corners | 64 Bytes | BRISK_threshold |
| AKAZE | Blobs | 61 Bytes | AKAZE_threshold |
| Max Features | 1000 | 10,000 |
| Threshold | ||
| SIFT Contrast | 0.01 | 0.008 |
| SURF Hessian | 60 | 8 |
| ORB Edge | 32 | 8 |
| BRISK | 10 | 7 |
| AKAZE | 0.0005 | 0.0001 |
| Dataset_1 | Dataset_2 | Dataset_3 | Dataset_4 | Dataset_5 | Dataset_6 | Dataset_7 | Dataset_8 | |
|---|---|---|---|---|---|---|---|---|
| Seafloor | sandy, algae (far), algae (close) | sandy, algae (far) | rocky, algae (far) | sandy, <algae (far) | sandy, algae (far) | sandy | sandy | sandy |
| Objects | poles | rocks | wreck | <debris | >>small rocks | <partial poles | ||
| Light | non-uniform | >>uniform | caustic pattern | night, backscatter | <<non-uniform | caustic pattern | >>uniform | >>uniform |
| Tint | greenish | greenish | natural | natural | greenish | natural | natural | greenish |
| Turbidity | low | low | low | low | low | low | low | low |
| # Frames | 11729 | 5830 | 1929 | 8308 | 9155 | 2514 | 2522 | 2388 |
| Notes | horizontal and vertical poles | little algae on rocks | robot shadow | wavy pattern on sand |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hidalgo, F.; Bräunl, T. Evaluation of Several Feature Detectors/Extractors on Underwater Images towards vSLAM. Sensors 2020, 20, 4343. https://doi.org/10.3390/s20154343
Hidalgo F, Bräunl T. Evaluation of Several Feature Detectors/Extractors on Underwater Images towards vSLAM. Sensors. 2020; 20(15):4343. https://doi.org/10.3390/s20154343
Chicago/Turabian StyleHidalgo, Franco, and Thomas Bräunl. 2020. "Evaluation of Several Feature Detectors/Extractors on Underwater Images towards vSLAM" Sensors 20, no. 15: 4343. https://doi.org/10.3390/s20154343
APA StyleHidalgo, F., & Bräunl, T. (2020). Evaluation of Several Feature Detectors/Extractors on Underwater Images towards vSLAM. Sensors, 20(15), 4343. https://doi.org/10.3390/s20154343