Estimating the Volume of Unknown Inclusions in an Electrically Conducting Body with Voltage Measurements


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Material and Methods
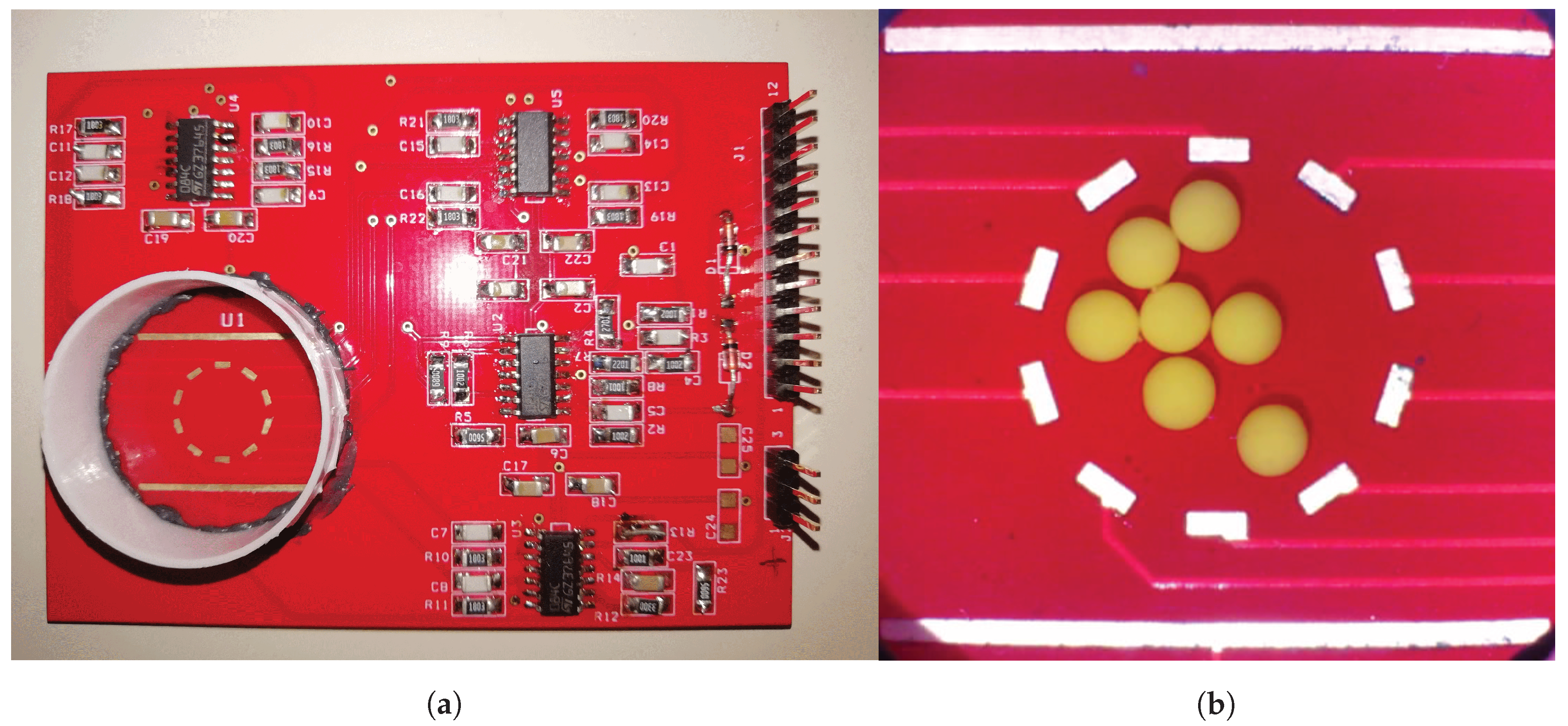
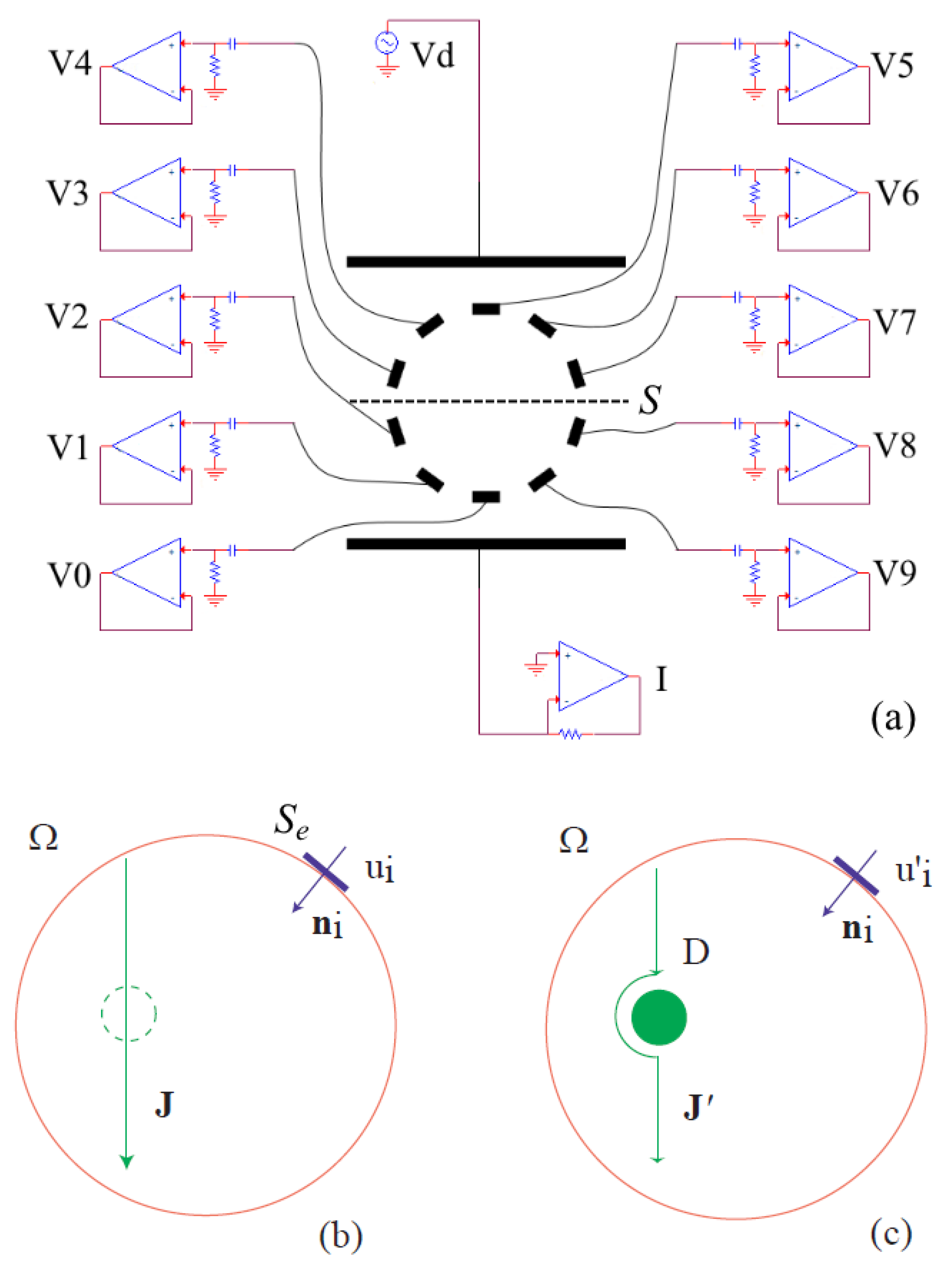
2.1. Sensor Description
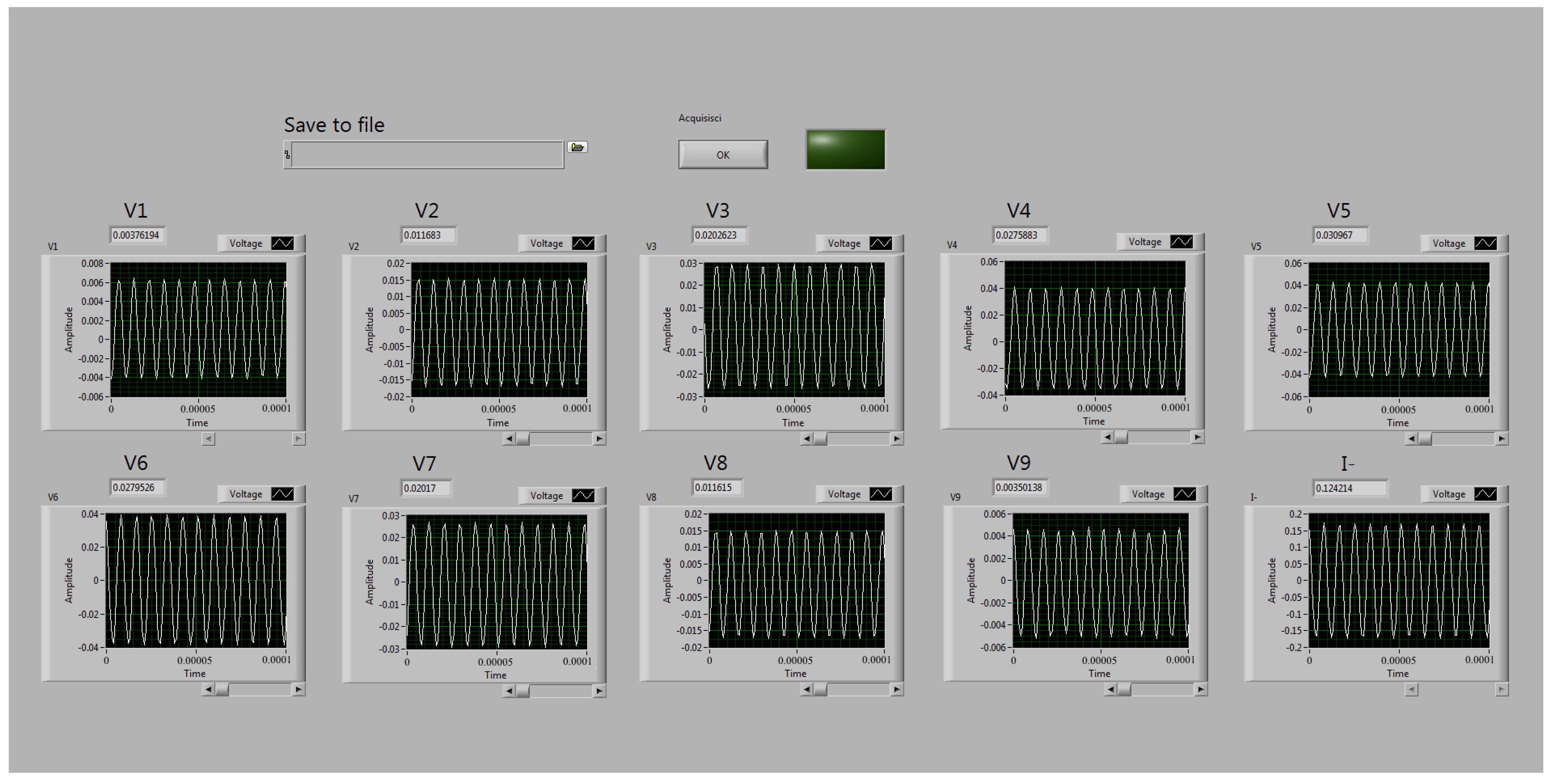
2.2. Data Acquisition
2.3. Modelling and Volume Reconstruction Formula
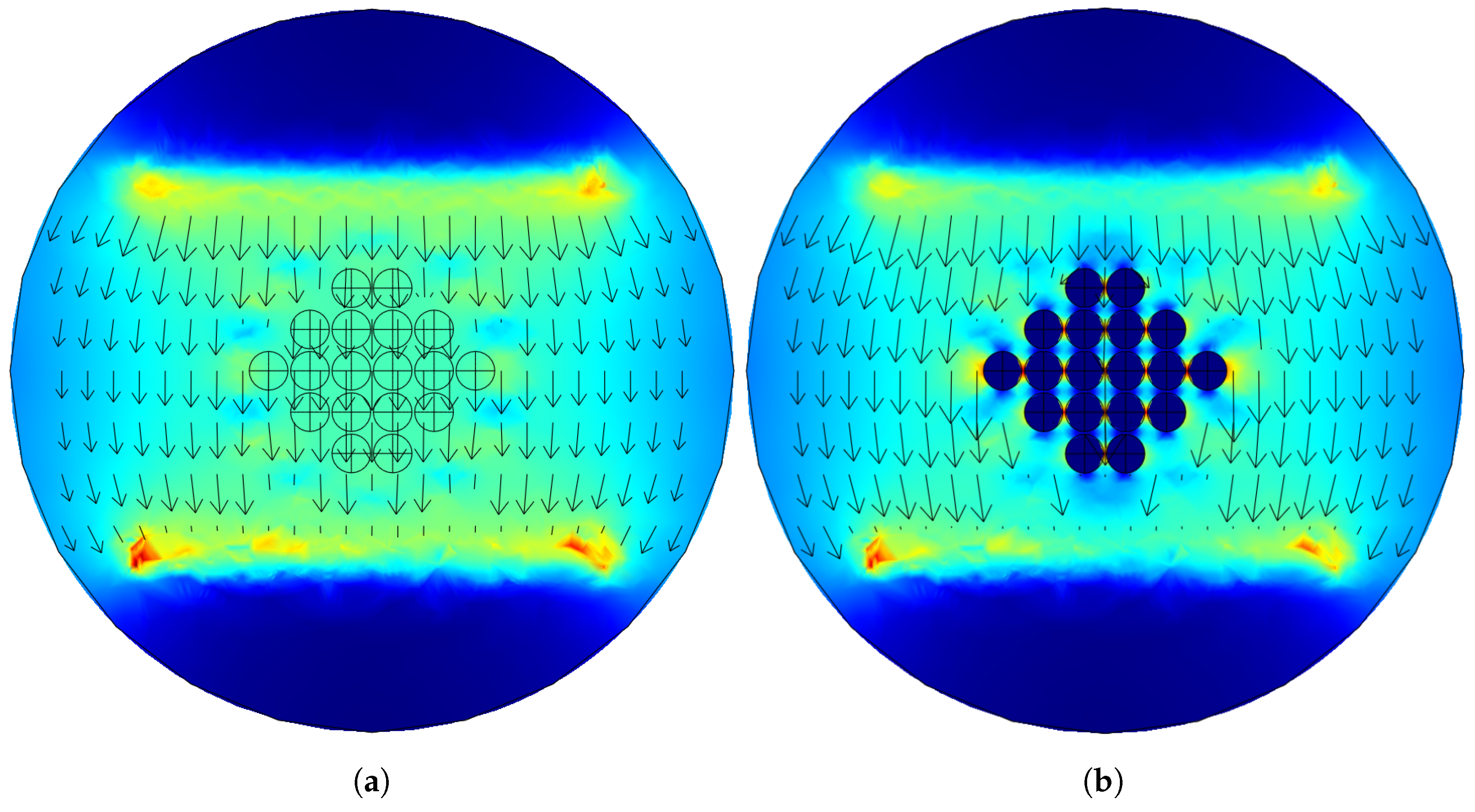
3. FEM Simulations
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rymarczyk, T.; Klosowski, G.; Kozlowski, E. A Non-Destructive System Based on Electrical Tomography and Machine Learning to Analyze the Moisture of Buildings. Sensors 2018, 18, 2285. [Google Scholar] [CrossRef] [PubMed]
- Rymarczyk, T.; Tchorzewski, P.; Sikora, J. Implementation of Electrical Impedance Tomography for Analysis of Building Moisture Conditions. Compel Int. J. Comput. Math. Electr. Electron. Eng. 2018, 37, 1837–1861. [Google Scholar] [CrossRef]
- Rymarczyk, T.; Tchorzewski, P. Analysis of Historical Wall Dampness Using Electrical Tomography Measuring System. Int. J. Appl. Electromagn. Mech. 2018. [Google Scholar] [CrossRef]
- Yorkey, T.J.; Webster, J.G.; Tompkins, W.J. Comparing Reconstruction Algorithms for Electrical Impedance Tomography. IEEE Trans. Biomed. Eng. 1987, 34, 843–852. [Google Scholar] [CrossRef] [PubMed]
- Polydorides, N.; Lionheart, W.R.B. A Matlab toolkit for three-dimensional electrical impedance tomography: A contribution to the Electrical Impedance and Diffuse Optical Reconstruction Software project. Meas. Sci. Technol. 2002, 13, 1871. [Google Scholar] [CrossRef]
- Henderson, R.P.; Webster, J.G. An Impedance Camera for Spatially Specific Measurements of the Thorax. IEEE Trans. Biomed. Eng. 1978, 25, 250–254. [Google Scholar] [CrossRef] [PubMed]
- Barber, D.C.; Brown, B.H. Applied Potential Tomography. J. Phys. E Sci. Instrum. 1984, 17, 723–733. [Google Scholar] [CrossRef]
- Barber, D.C.; Brown, B.H.; Freeston, I.L. Imaging Spatial distributions of resistivity using Applied Potential Tomography. Electron. Lett. 1983, 19, 93–95. [Google Scholar] [CrossRef]
- Cheney, M.; Isaacson, D.; Newell, J. Electrical Impedance Tomography. SIAM Rev. 1999, 41, 85–101. [Google Scholar] [CrossRef]
- Zhang, T.; Zhou, L.; Ammari, H.; Seo, J.K. Electrical Impedance Spectroscopy-Based Defect Sensing Technique in Estimating Cracks. Sensors 2015, 15, 10909–10922. [Google Scholar] [CrossRef]
- Avery, J.; Dowrick, T.; Faulkner, M.; Goren, N.; Holder, D. A Versatile and Reproducible Multi-Frequency Electrical Impedance Tomography System. Sensors 2017, 17, 280. [Google Scholar] [CrossRef] [PubMed]
- Russo, S.; Nefti-Meziani, S.; Carbonaro, N.; Tognetti, A. A Quantitative Evaluation of Drive Pattern Selection for Optimizing EIT-Based Stretchable Sensors. Sensors 2017, 17, 1999. [Google Scholar] [CrossRef] [PubMed]
- Dupré, A.; Mylvaganam, S. A Simultaneous and Continuous Excitation Method for High-Speed Electrical Impedance Tomography with Reduced Transients and Noise Sensitivity. Sensors 2018, 18, 1013. [Google Scholar] [CrossRef] [PubMed]
- Affanni, A.; Chiorboli, G.; Codecasa, L.; Cozzi, M.; Marco, L.D.; Mazzucato, M.; Morandi, C.; Specogna, R.; Tartagni, M.; Trevisan, F. A novel inversion technique for imaging thrombus volume in microchannels fusing optical and impedance data. IEEE Trans. Magn. 2014, 50, 1021–1024. [Google Scholar] [CrossRef]
- Affanni, A.; Specogna, R.; Trevisan, F. Ex vivo time evolution of thrombus growth through optical and electrical impedance data fusion. J. Phys. Conf. Ser. 2013, 459, 012016. [Google Scholar] [CrossRef]
- Affanni, A.; Specogna, R.; Trevisan, F. Combined electro-optical imaging for the time evolution of white thrombus growth in artificial capillaries. IEEE Trans. Instrum. Meas. 2013, 62, 2954–2959. [Google Scholar] [CrossRef]
- De Zanet, D.; Battiston, M.; Lombardi, E.; Specogna, R.; Trevisan, F.; Marco, L.D.; Affanni, A.; Mazzucato, M. Impedance biosensor for real-time monitoring and prediction of thrombotic individual profile in flowing blood. PLoS ONE 2017, 12, e018494. [Google Scholar] [CrossRef]
- Rosset, E.; Alessandrini, G. The Inverse Conductivity Problem with One Measurement: Bounds on the Size of the Unknown Object. SIAM J. Appl. Math. 1998, 58, 1060–1071. [Google Scholar] [CrossRef]
- Alessandrini, G.; Rosset, E.; Seo, J. Optimal size estimates for the inverse conductivity problem with one measurement. Proc. Am. Math. Soc. 2000, 128, 53–64. [Google Scholar] [CrossRef]
- Alessandrini, G.; Rosset, E. Volume bounds of inclusions from physical EIT measurements. Inverse Probl. 2004, 20, 575. [Google Scholar] [CrossRef]
- Alessandrini, G.; Bilotta, A.; Morassi, A.; Rosset, E.; Turco, E. Computing Volume Bounds of Inclusions by EIT Measurements. J. Sci. Comput. 2007, 33, 293. [Google Scholar] [CrossRef]
- Kwon, O.; Seo, J.K. Total size estimation and identification of multiple anomalies in the inverse conductivity problem. Inverse Probl. 2001, 17, 59. [Google Scholar] [CrossRef]
- Kwon, O.; Seo, J.K.; Yoon, J.R. A real time algorithm for the location search of discontinuous conductivities with one measurement. Commun. Pure Appl. Math. 2002, 55, 1–29. [Google Scholar] [CrossRef]
- Kwon, O.; Seo, J.K.; Woo, E.J.; Yoon, J.R. Electrical impedance imaging for searching anomalies. Commun. Korean Math. Soc. 2001, 16, 459–485. [Google Scholar]
- Kwon, O.; Yoon, J.R.; Seo, J.K.; Woo, E.J.; Cho, Y.G. Estimation of anomaly location and size using electrical impedance tomography. IEEE Trans. Biomed. Eng. 2003, 50, 89–96. [Google Scholar] [CrossRef] [PubMed]
- Trevisan, F.; Affanni, A.; Specogna, R.; De Marco, L.; Mazzucato, M.; Battiston, M. Apparatus for Analyzing the Process of Formation of Aggregates in a Biological Fluid and Corresponding Method of Analysis. U.S. Patent 20160047827A1, 18 February 2016. [Google Scholar]






© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Affanni, A.; Specogna, R.; Trevisan, F. Estimating the Volume of Unknown Inclusions in an Electrically Conducting Body with Voltage Measurements. Sensors 2019, 19, 637. https://doi.org/10.3390/s19030637
Affanni A, Specogna R, Trevisan F. Estimating the Volume of Unknown Inclusions in an Electrically Conducting Body with Voltage Measurements. Sensors. 2019; 19(3):637. https://doi.org/10.3390/s19030637
Chicago/Turabian StyleAffanni, Antonio, Ruben Specogna, and Francesco Trevisan. 2019. "Estimating the Volume of Unknown Inclusions in an Electrically Conducting Body with Voltage Measurements" Sensors 19, no. 3: 637. https://doi.org/10.3390/s19030637
APA StyleAffanni, A., Specogna, R., & Trevisan, F. (2019). Estimating the Volume of Unknown Inclusions in an Electrically Conducting Body with Voltage Measurements. Sensors, 19(3), 637. https://doi.org/10.3390/s19030637