Three-Dimensional Measurement Method of Four-View Stereo Vision Based on Gaussian Process Regression

Abstract
:1. Introduction
2. Measurement Principle
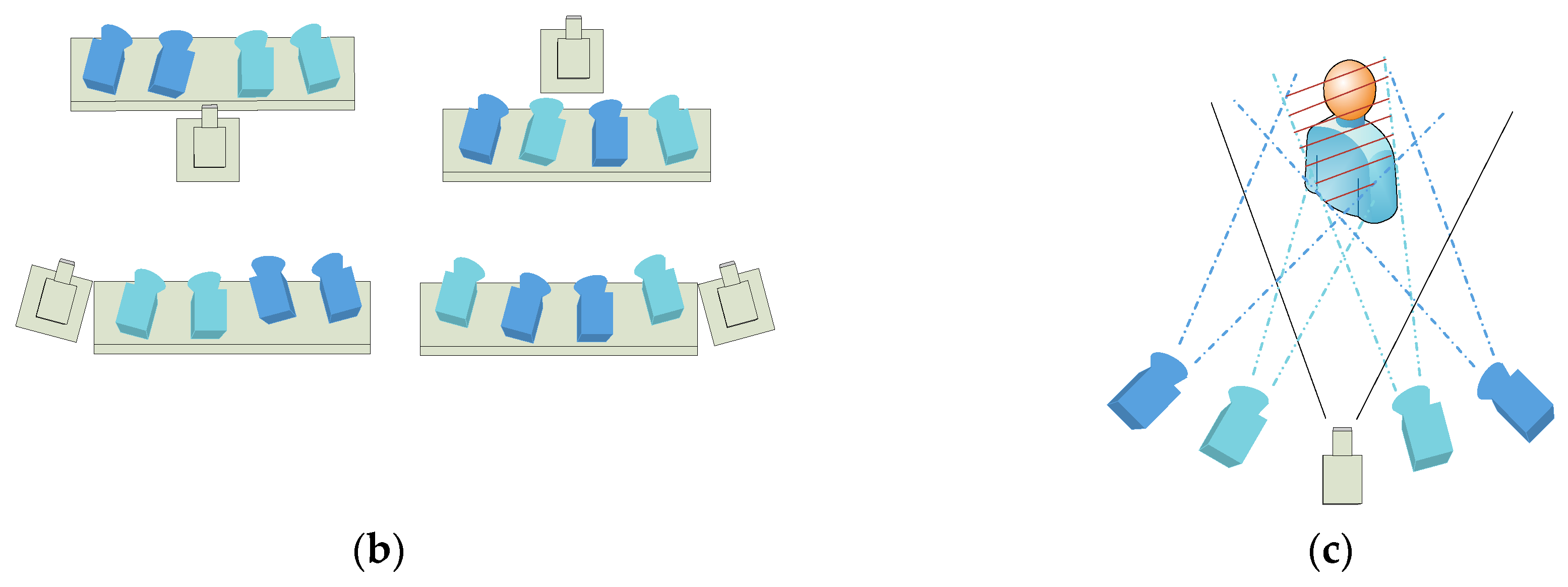
2.1. Measurement System
2.2. Measurement Principle
3. Optimization Method
3.1. GP
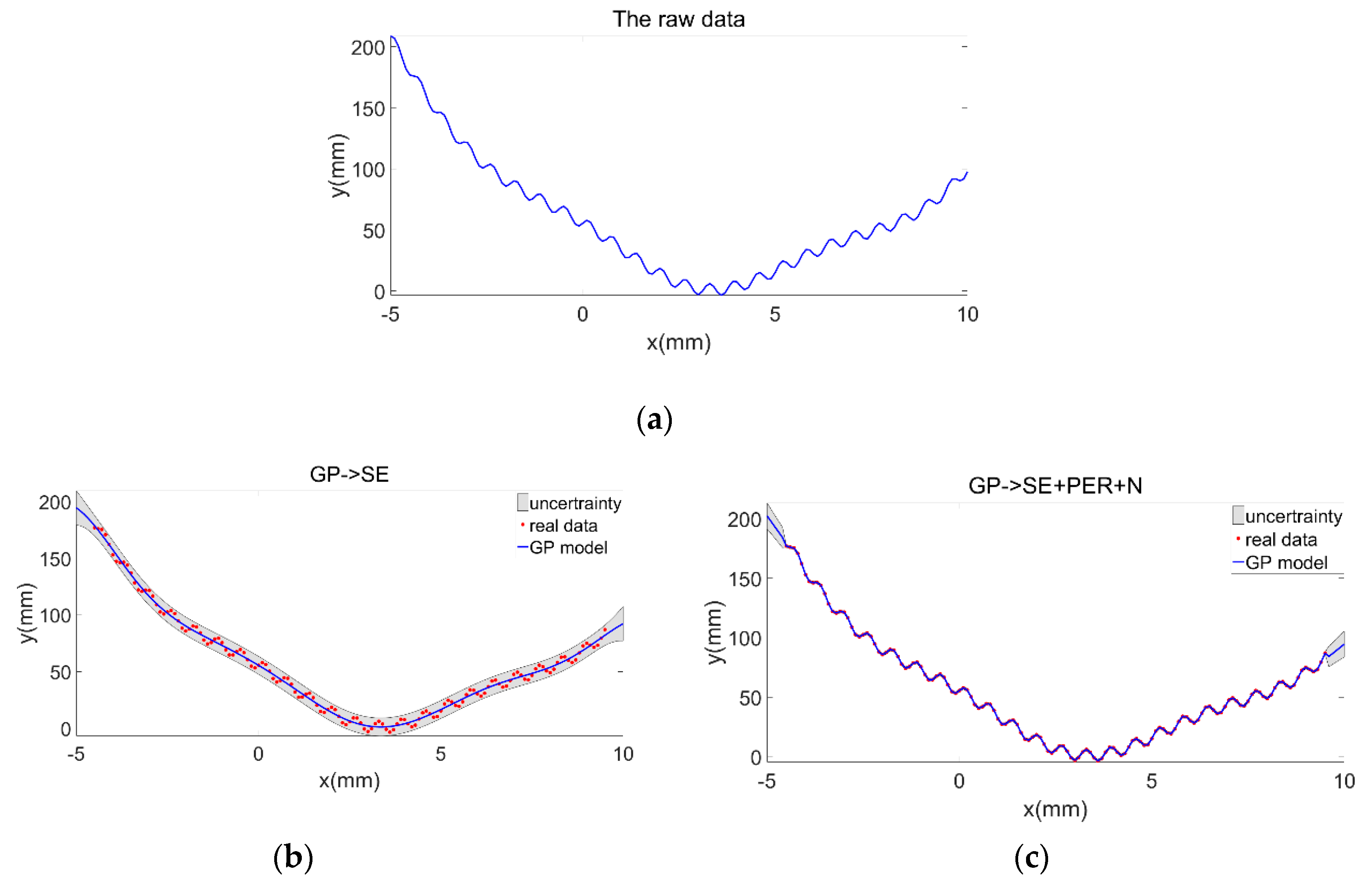
3.2. Covariance Kernel Function Selection
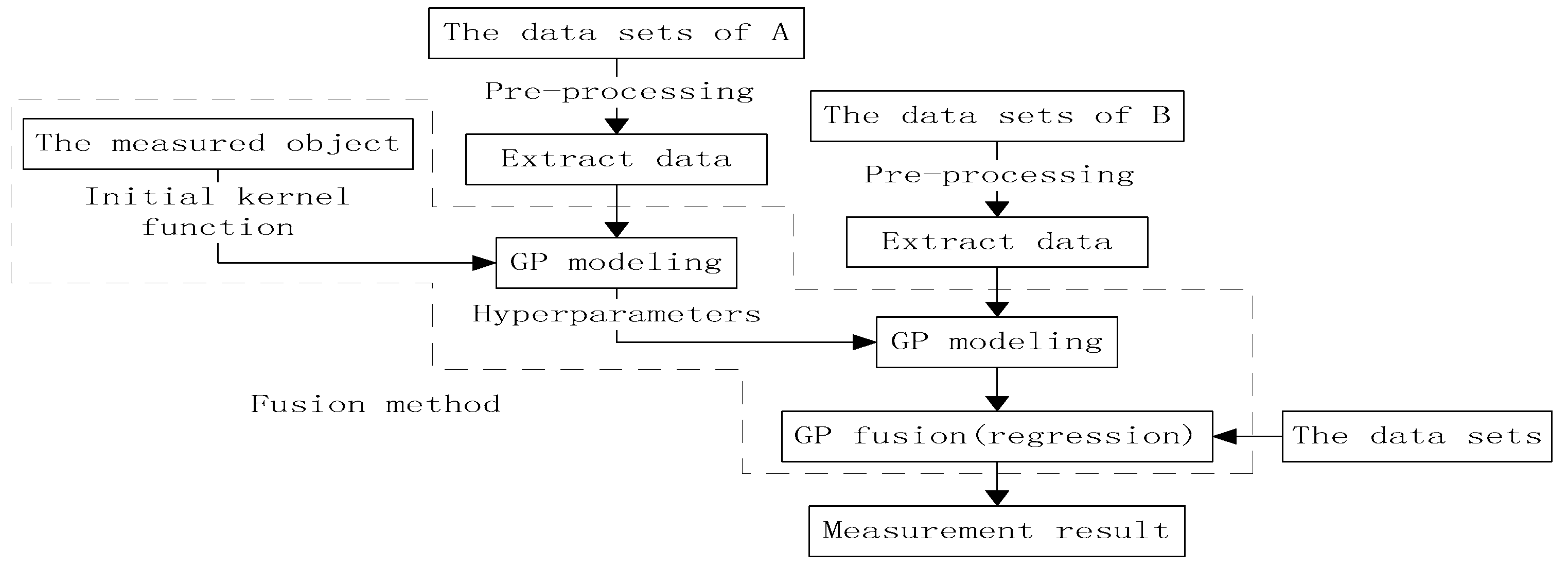
3.3. GP-Based Sampling and Data Fusion
4. Experimental and Discussion
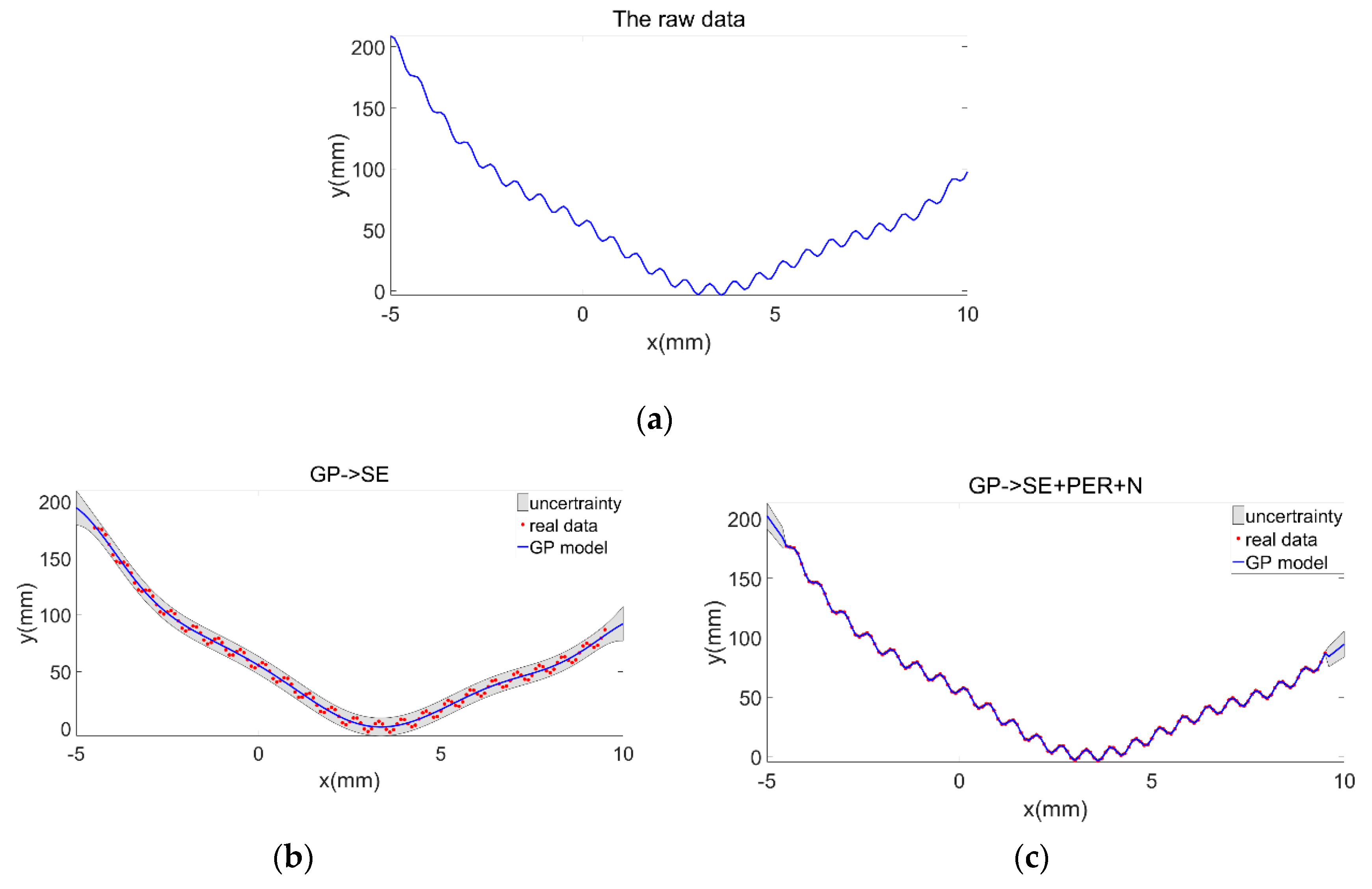
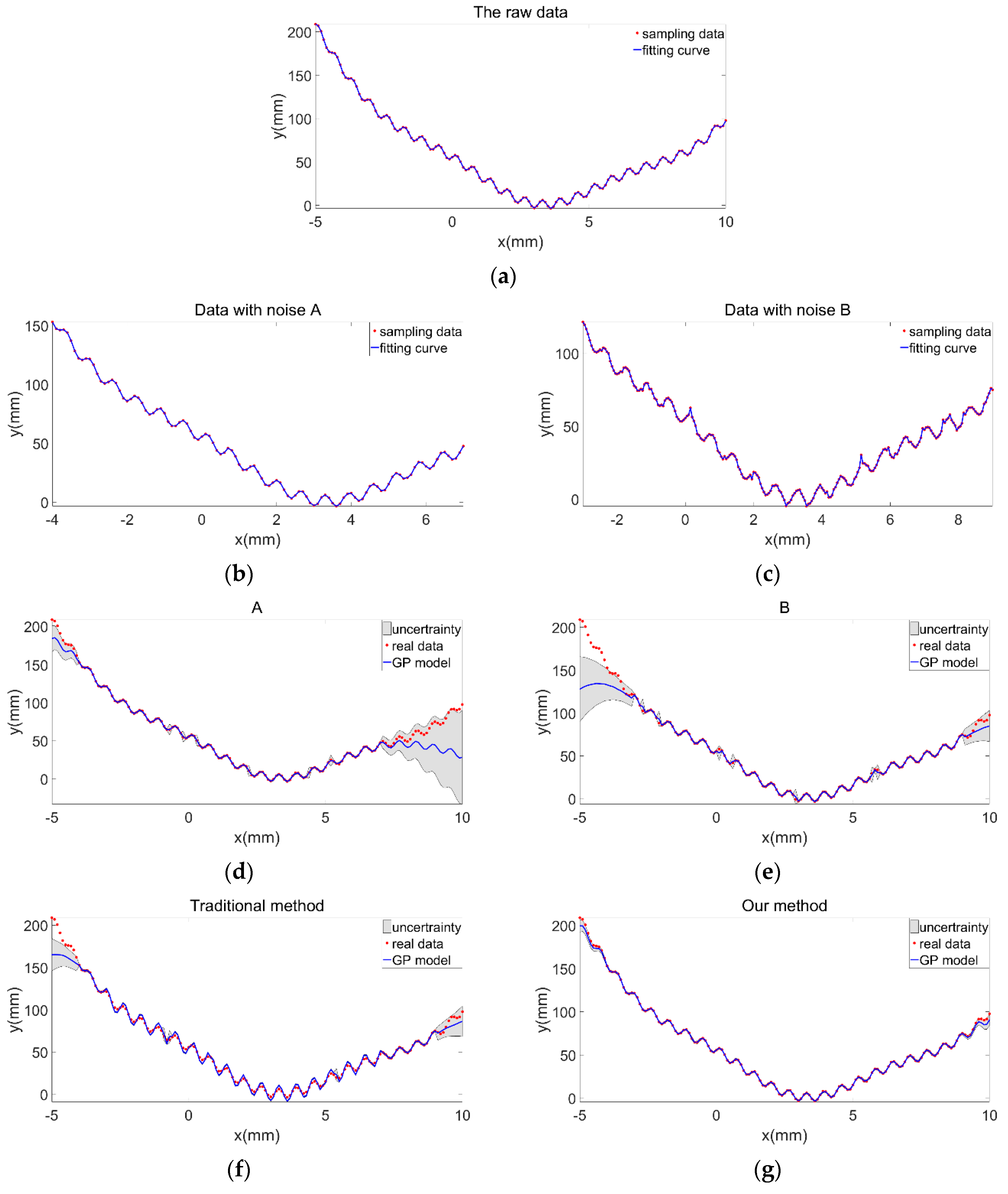
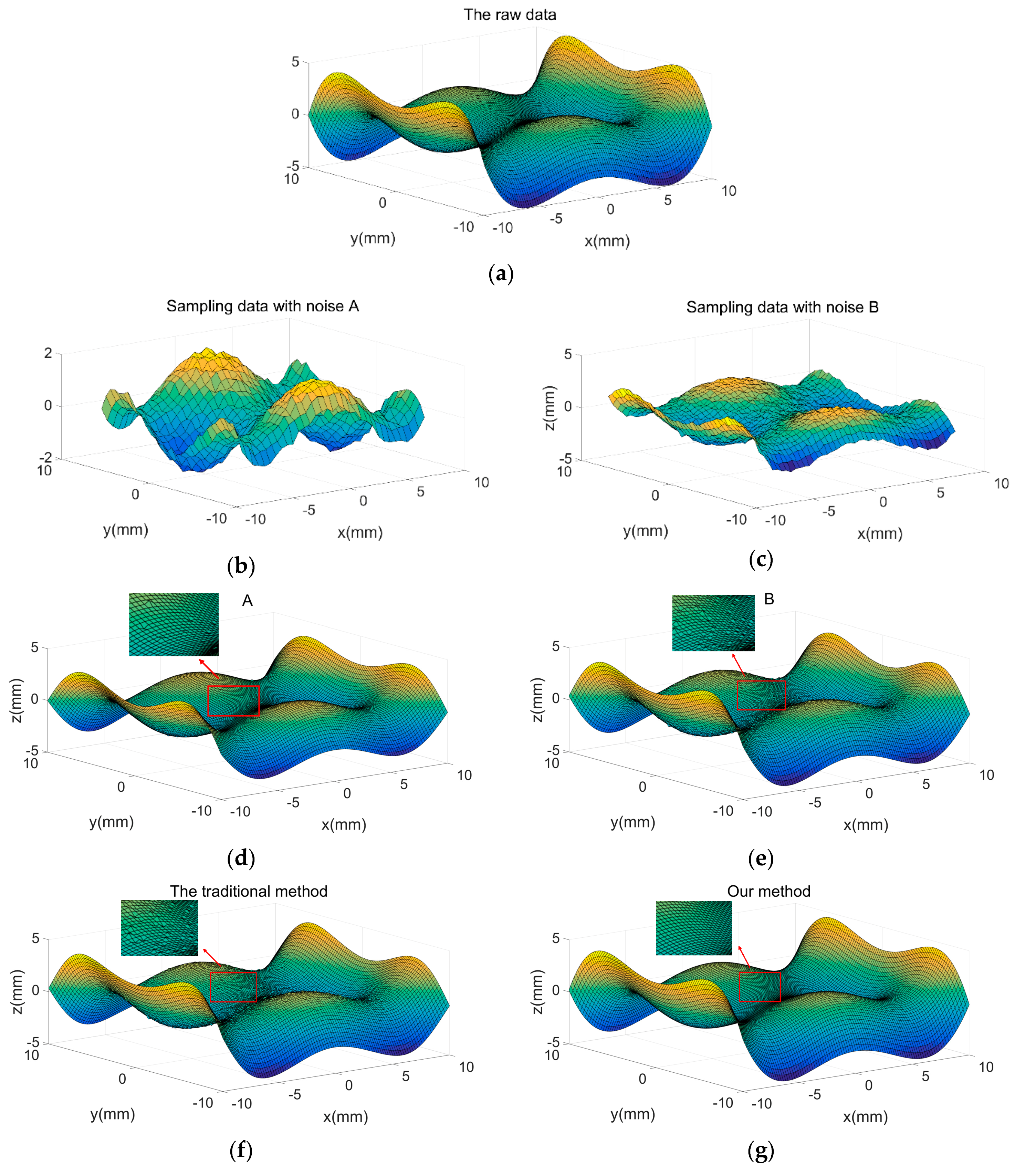
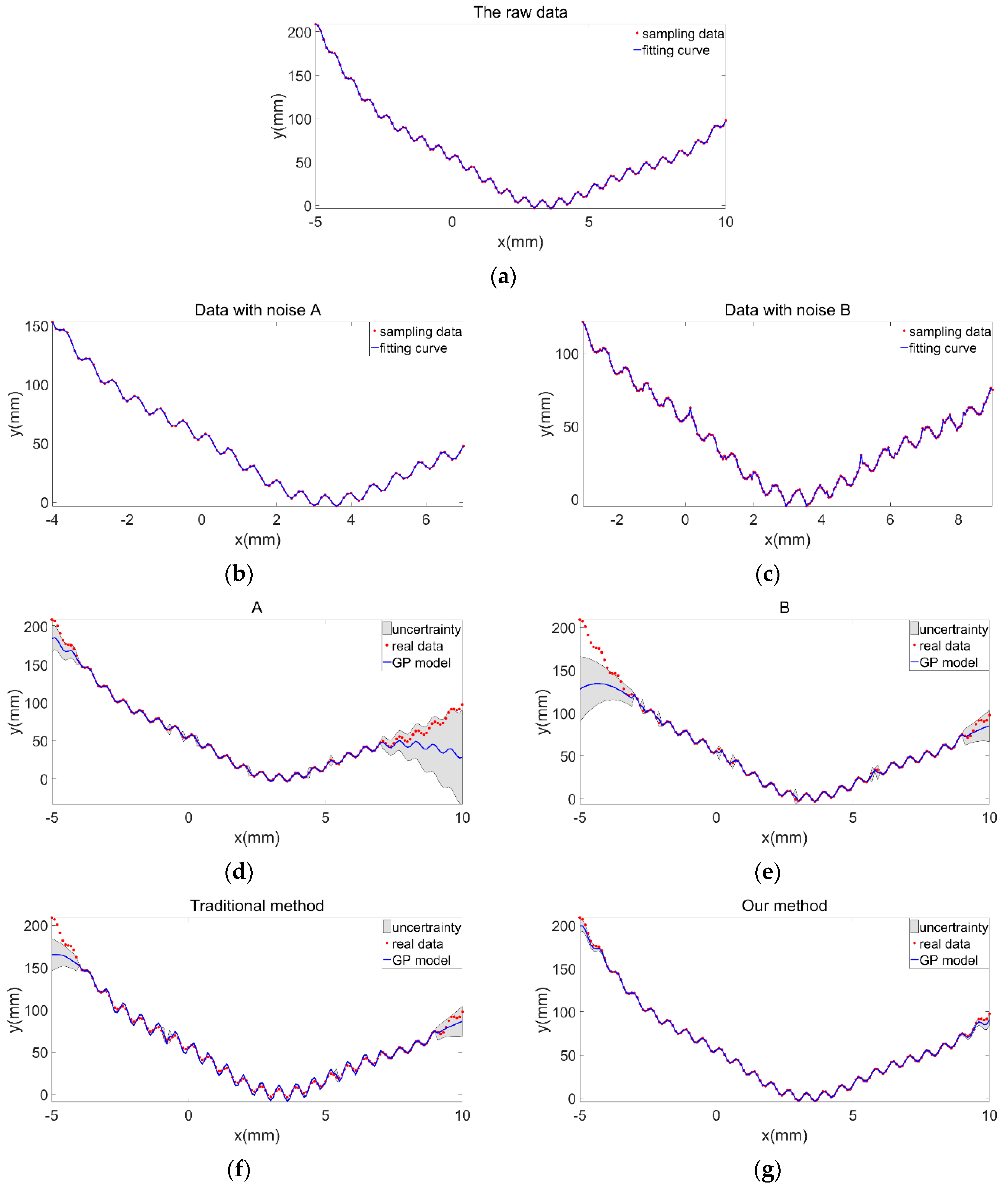
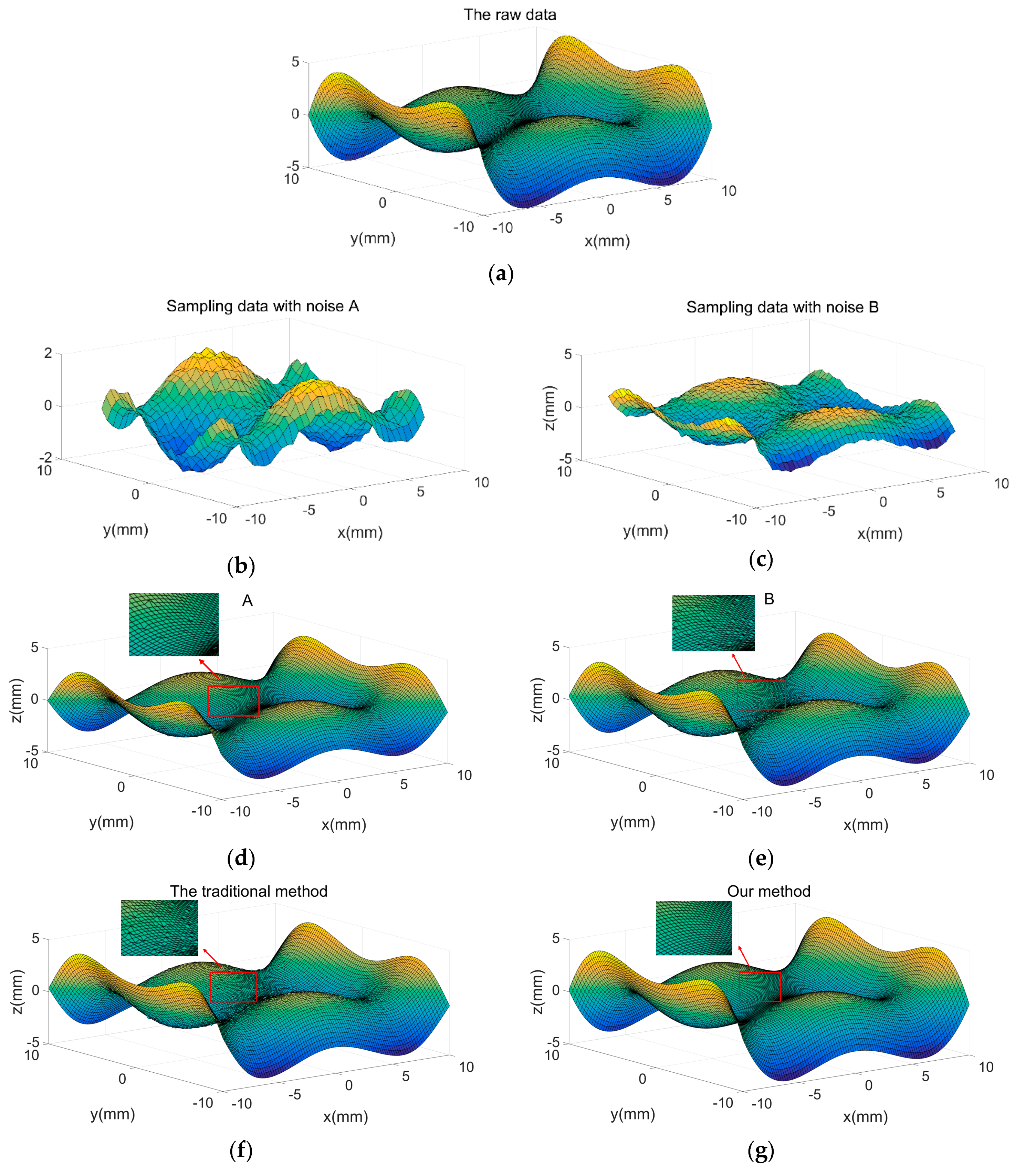
4.1. Simulation Examples and Analysis
4.2. Experimental Preparation
4.3. Experimental Results and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Geng, J. Structured-light 3D surface imaging: A tutorial. Adv. Opt. Photonics 2011, 3, 128–160. [Google Scholar] [CrossRef]
- Zhang, S. High-speed 3-D shape measurement with structured light methods: A review. Opt. Laser Eng. 2018, 106, 119–131. [Google Scholar] [CrossRef]
- Feng, S.; Zhang, L.; Zuo, C.; Tao, T.; Chen, Q.; Gu, G. High dynamic range 3-D measurements with fringe projection profilometry: A review. Meas. Sci. Technol. 2018, 29, 122001. [Google Scholar] [CrossRef]
- Peng, J.; Xu, W.; Liang, B.; Wu, A.G. Pose Measurement and Motion Estimation of Space Non-cooperative Targets based on Laser Radar and Stereo-vision Fusion. IEEE Sens. J. 2018, 19, 3008–3019. [Google Scholar] [CrossRef]
- Peng, J.; Xu, X.; Liang, B.; Wu, A. Virtual Stereo-vision Measurement of Non-cooperative Space Targets for a Dual-arm Space Robot. IEEE Trans. Instrum. Meas. 2019, 1–13. [Google Scholar] [CrossRef]
- Peng, J.; Xu, W.; Yuan, H. An Efficient Pose Measurement Method of a Space Non-Cooperative Target Based on Stereo Vision. IEEE Access 2017, 5, 22344–22362. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, B.; Huang, J.; Wu, Z.; Zeng, Z. Flexible 3D reconstruction method based on phase-matching in multi-sensor system. Opt. Express 2016, 24, 7299–7318. [Google Scholar] [CrossRef]
- Xue, B.; Cao, L.; Han, D.; Bai, X.; Zhou, F.; Jiang, Z. A DAISY descriptor based multi-view stereo method for large-scale scenes. J. Vis. Commun. Image Represent. 2016, 35, 15–24. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Slaughter, D.C.; Maloof, J.N.; Sinha, N. Plant phenotyping using multi-view stereo vision with structured lights. In Proceedings of the SPIE Commercial + Scientific Sensing and Imaging, Baltimore, MD, USA, 17–21 April 2016. [Google Scholar]
- Valsaraj, A.; Barik, A.; Vishak, P.V.; Midhun, K.M. Stereo vision system implemented on FPGA. Procedia Technol. 2016, 24, 1105–1112. [Google Scholar] [CrossRef]
- Dehnavi, M.; Eshghi, M. FPGA based real-time on-road stereo vision system. J. Syst. Archit. 2017, 81, 32–43. [Google Scholar] [CrossRef]
- Domínguez-Morales, M.; Domínguez-Morales, J.P.; Jiménez-Fernández, Á.; Linares-Barranco, A.; Jiménez-Moreno, G. Stereo Matching in Address-Event-Representation (AER) Bio-Inspired Binocular Systems in a Field-Programmable Gate Array (FPGA). Electron. 2019, 8, 410. [Google Scholar] [CrossRef]
- Peng, J.; Liu, Y. FPGA-based parallel hardware architecture for SIFT algorithm. In Proceedings of the IEEE International Conference on Real-time Computing & Robotics, Angkor Wat, Cambodia, 6–9 June 2016. [Google Scholar]
- Lyu, C.; Peng, J.; Zhou, W.; Yang, S.; Liu, Y. Design of a High Speed 360-degree Panoramic Video Acquisition System Based on FPGA and USB 3.0. IEEE Sens. J. 2016. [Google Scholar] [CrossRef]
- Williams, C.K.I.; Rasmussen, C.E. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006; pp. 7–32. [Google Scholar]
- Snelson, E. Flexible and Efficient Gaussian Process Models for Machine Learning. Ph.D. Thesis, University of London, London, UK, 2007. [Google Scholar]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning (Adaptive Computation and Machine Learning); The MIT Press: Cambridge, MA, USA, 2005; pp. 69–106. [Google Scholar]
- Park, C.; Huang, J.Z.; Ding, Y. Domain decomposition approach for fast Gaussian process regression of large spatial data sets. J. Mach. Learn. Res. 2011, 12, 1697–1728. [Google Scholar]
- Song, X.; Jiang, X.; Gao, J.; Cai, Z. Gaussian Process Graph-Based Discriminant Analysis for Hyperspectral Images Classification. Remote Sens. 2019, 11, 2288. [Google Scholar] [CrossRef]
- Colosimo, B.M.; Pacella, M.; Senin, N. Multi-Sensor Data Fusion Via Gaussian Process Models for Dimensional and Geometric Verification. Precis. Eng. 2015, 40, 199–213. [Google Scholar] [CrossRef]
- Yin, Y.; Ren, M.J.; Sun, L.; Kong, L. Gaussian process based multi-scale modelling for precision measurement of complex surfaces. CIRP Annals Manuf. Technol. 2016, 65, 487–490. [Google Scholar] [CrossRef]
- Yin, Y.; Ren, M.J.; Sun, L. Dependant Gaussian processes regression for intelligent sampling of freeform and structured surfaces. CIRP Annals Manuf. Technol. 2017, 66, 511–514. [Google Scholar] [CrossRef]
- Wang, J.; Leach, R.; Jiang, X. Review of the Mathematical Foundations of Data Fusion Techniques in Surface Metrology. Surf. Topogr. Metrol. Prop. 2015, 3, 023001. [Google Scholar] [CrossRef]
- Dumas, A.; Echard, B.; Gayton, N.; Rochat, O.; Dantan, J.Y.; Van Der Veen, S. AKILS: An Active Learning Method Based on Kriging for the Inspection of Large Surfaces. Precis. Eng. 2013, 37, 1–9. [Google Scholar] [CrossRef]
- Richardson, R.R.; Osborne, M.A.; Howey, D.A. Gaussian process regression for forecasting battery state of health. J. Power Sour. 2017, 357, 209–219. [Google Scholar] [CrossRef]
- Ebden, M. Gaussian processes: A quick introduction. arXiv 2015, arXiv:1505.02965. [Google Scholar]
- Rasmussen, C.E. Gaussian processes in machine learning. Adv. Lect. Mach. Learn. 2004, 3176, 63–71. [Google Scholar]
- Lazaro-Gredilla, M.; Titsias, M.K.; Verrelst, J. Retrieval of biophysical parameters with heteroscedastic Gaussian processes. IEEE Geosci. Remote Sens. Lett. 2014, 11, 838–842. [Google Scholar] [CrossRef]
- Muñoz-González, L.; Lázaro-Gredilla, M.; Figueiras-Vidal, A.R. Divisive Gaussian processes for nonstationary regression. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 1991–2003. [Google Scholar] [CrossRef]
- Valiente, D.; Payá, L.; Jiménez, L.M.; Sebastián, J.M.; Reinoso, Ó. Visual Information Fusion through Bayesian Inference for Adaptive Probability-Oriented Feature Matching. Sensors 2018, 18, 2041. [Google Scholar] [CrossRef]
- GhaffarJadidi, M.; Valls Miro, J.; Dissanayake, G. Gaussian processes autonomous mapping and exploration for range-sensing mobile robots. Auton. Robots 2018, 42, 273–290. [Google Scholar] [CrossRef]
- Benavoli, A.; Mangili, F. Gaussian Processes for Bayesian hypothesis tests on regression functions. In Proceedings of the Eighteenth International Conference on Artificial Intelligence and Statistics, San Diego, CA, USA, 9–12 May 2015; pp. 74–82. [Google Scholar]
- Zhao, P.; Wang, Y.; Hu, Q. A feature preserving algorithm for point cloud simplification based on hierarchical clustering. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium, Beijing, China, 10–15 July 2016; pp. 5581–5584. [Google Scholar]
- Vasudevan, S.; Ramos, F.; Nettleton, E.; Durrant-Whyte, H. Heteroscedastic Gaussian processes for data fusion in large scale terrain modeling. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 3452–3459. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
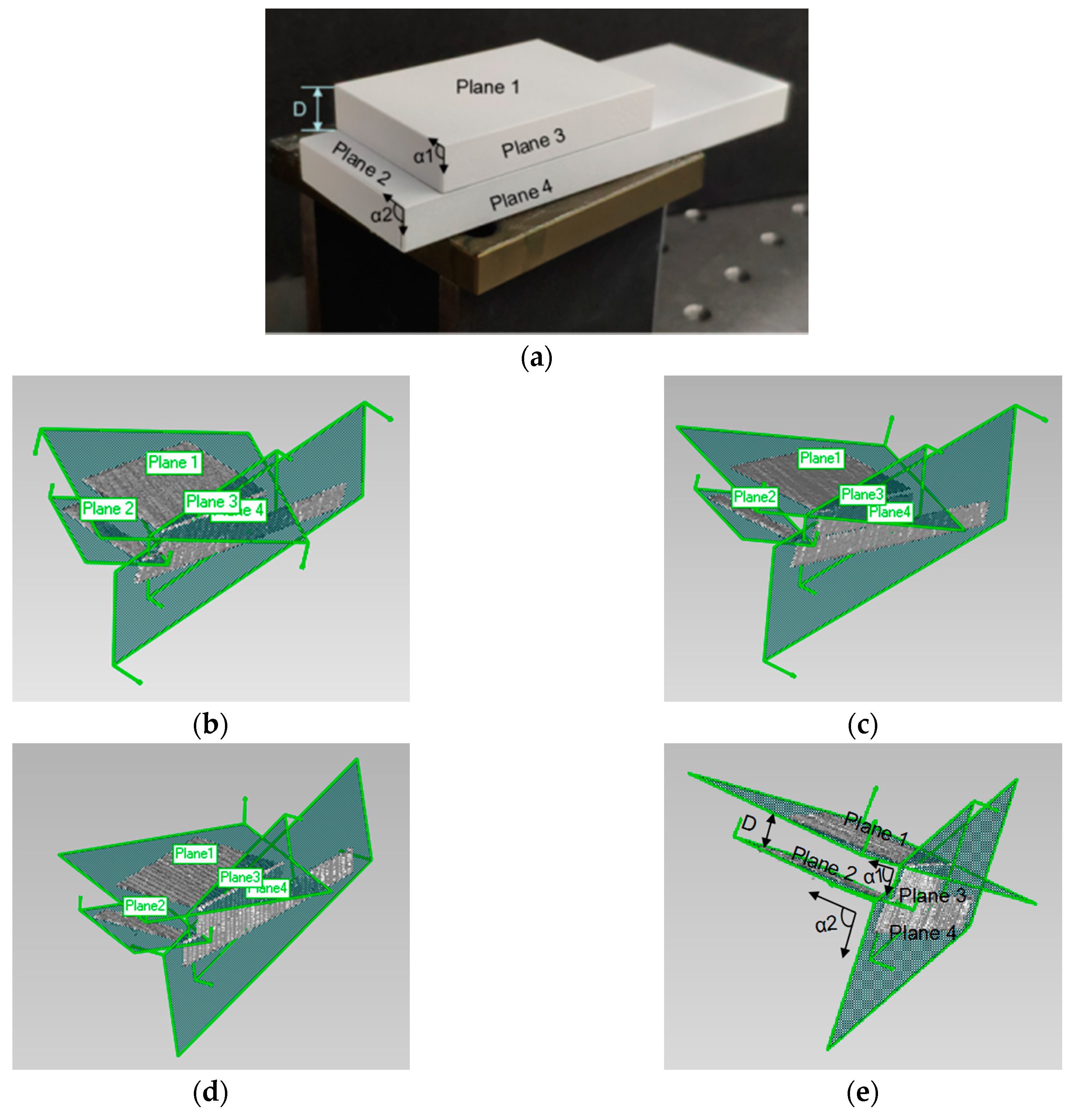
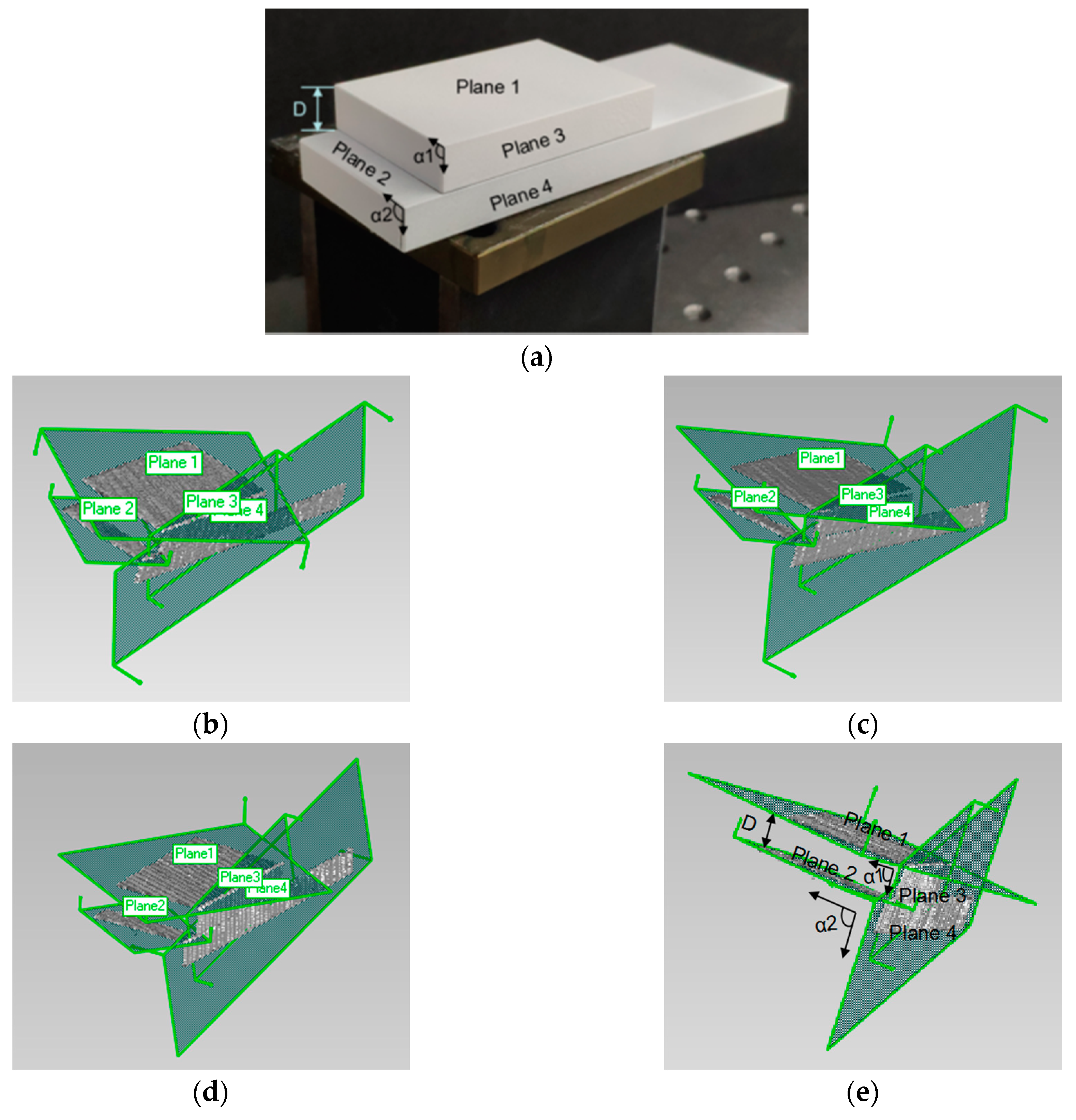
| Actual Value | Measured Value | ||||
|---|---|---|---|---|---|
| Group A | Group B | Traditional Method | Our Method | ||
| D (mm) | 9.023 | 9.125 | 9.147 | 9.094 | 9.058 |
| Absolute error1 (mm) | 0.102 | 0.124 | 0.071 | 0.035 | |
| α1 (°) | 90.81 | 90.932 | 91.017 | 90.912 | 90.908 |
| Absolute error2 (°) | 0.122 | 0.207 | 0.102 | 0.098 | |
| α2 (°) | 90.82 | 90.914 | 90.993 | 90.933 | 90.902 |
| Absolute error3 (°) | 0.094 | 0.173 | 0.113 | 0.082 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, M.; Zhang, Z.; Zeng, D.; Peng, T. Three-Dimensional Measurement Method of Four-View Stereo Vision Based on Gaussian Process Regression. Sensors 2019, 19, 4486. https://doi.org/10.3390/s19204486
Gong M, Zhang Z, Zeng D, Peng T. Three-Dimensional Measurement Method of Four-View Stereo Vision Based on Gaussian Process Regression. Sensors. 2019; 19(20):4486. https://doi.org/10.3390/s19204486
Chicago/Turabian StyleGong, Miao, Zhijiang Zhang, Dan Zeng, and Tao Peng. 2019. "Three-Dimensional Measurement Method of Four-View Stereo Vision Based on Gaussian Process Regression" Sensors 19, no. 20: 4486. https://doi.org/10.3390/s19204486
APA StyleGong, M., Zhang, Z., Zeng, D., & Peng, T. (2019). Three-Dimensional Measurement Method of Four-View Stereo Vision Based on Gaussian Process Regression. Sensors, 19(20), 4486. https://doi.org/10.3390/s19204486