4.1. Controller Analysis Considering Secondary Objectives
The design of the kinematic controllers proposed in this paper was based on numerical methods tools. To facilitate the search for the solution of a set of equations, a system can be represented in a matrix structure, where theorems and axioms of linear algebra are applied. In this way, it is considered the first-order differential equation:
where
represents the output of the system to be the controller with initial conditions
,
is the first derivative with respect to time, and
is the control action. Furthermore,
becomes
in the discrete time with
, where
represents the proposed sampling time respecting the Nyquist theorem, and
are the samples of the continuous response.
Given that the state and the control action on the time instant
are known, the system’s state at instant
can be approximated by Euler’s method [
27] as
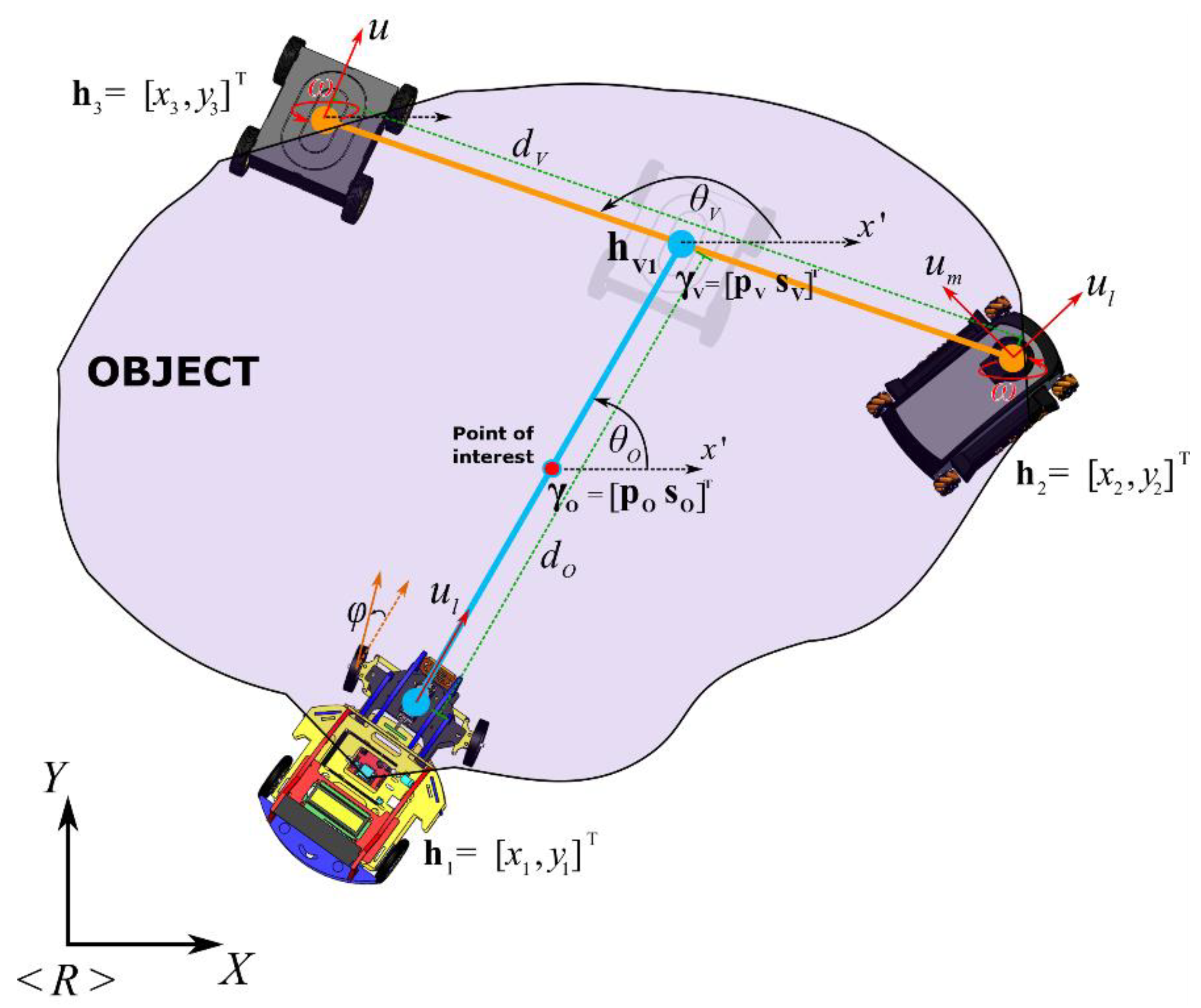
The design of the kinematic controller was based on the kinematic transformation of the mobile vehicles cooperation. In order to design a formation controller or a path following, the kinematic transformation can be approximated as:
where
contains the characteristics of both the positioning and the formation of all the robotic systems in the case of the formation controller or the positioning information of the object in the case of the path following.
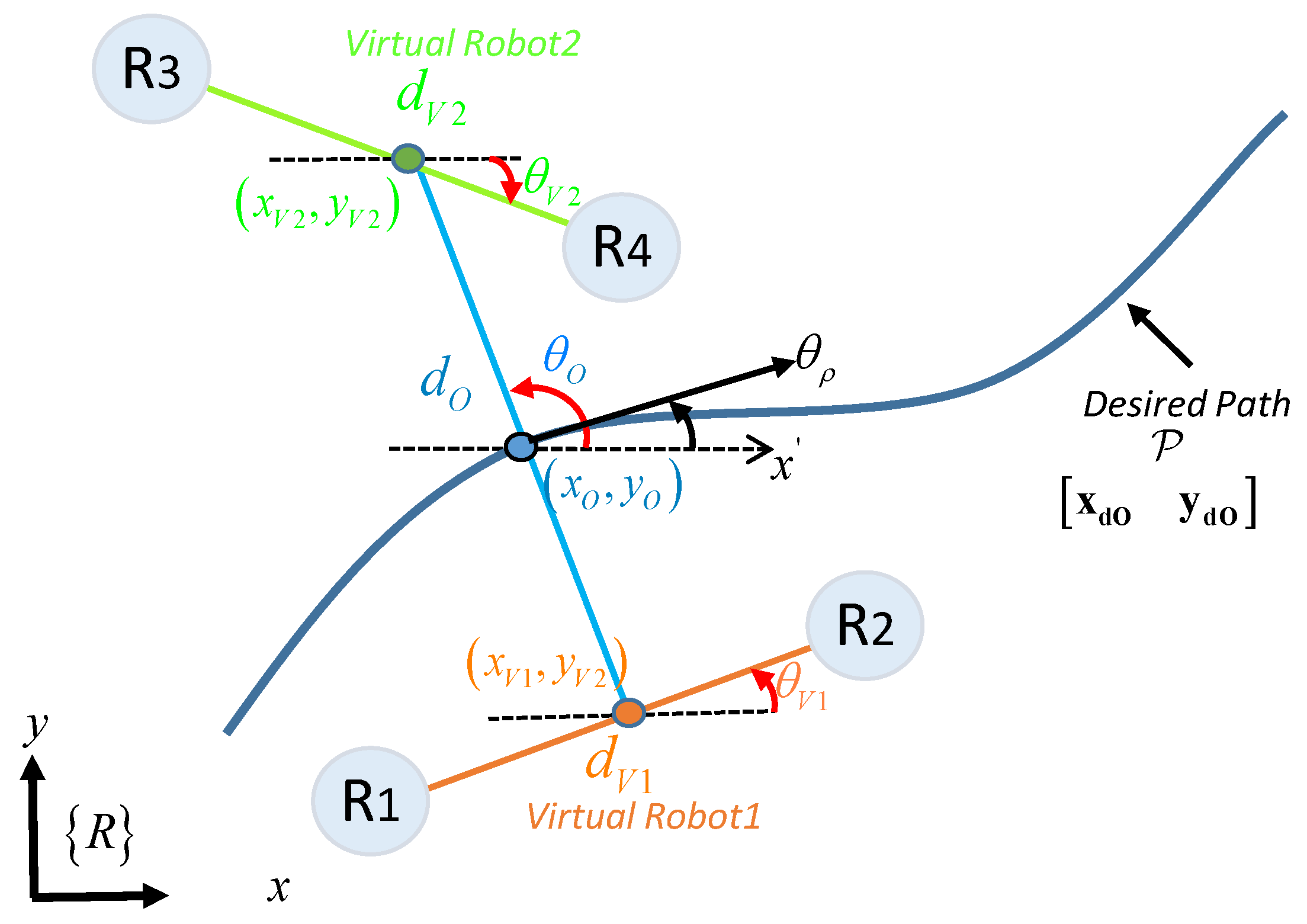
It is important to mention that following a path consists of maintaining the position and orientation of the object to be transported within a predefined route without parameterization in time. In this way, the control objective is to position the object at the closest point of the marked path P at the desired velocity
. To reach this goal, the following expression is considered,
where
is a point of the desired path with the desired shape at the previous instant of
and
is a diagonal matrix that weights control errors
, defined as:
with
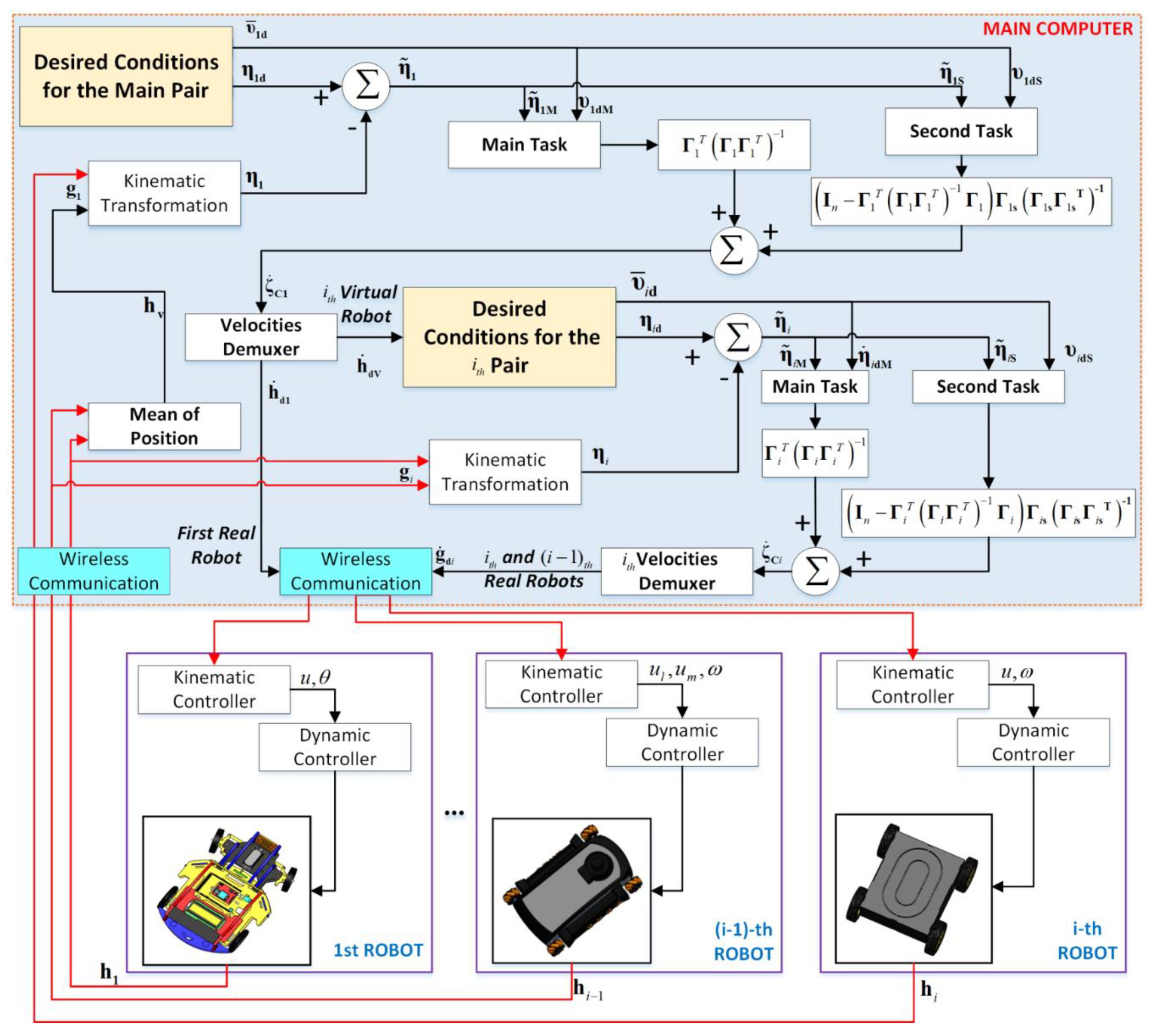
represents the error vector at the outputs of the controller (see
Figure 3), and
that represents each of the states of formation of the cooperative control. Now, Equations (9) and (10) can be considered to generate the system of equations
which let us rewrite the system as
, where
,
, and
, with
. In this way, the control actions are defined as
. In case
is quadratic (with
),
has a direct inverse solution, otherwise, it must be necessary to use a method to solve the pseudoinverse problem, given by:
Remark 2: The pseudo-inverse here applied was that introduced by Moore and Penrose. It has the property that it thus distributes the coefficients of the redundant columns in the solution that the sum of squares of these coefficients was minimized [28]. Unfortunately, in cases where loses rank, it is known that the pseudo-inverse approach will not always avoid singular configurations. In singularities, the original task is replaced by a solution of which does not precisely correspond to the original one. By means of the use of the Gram-Schmidt algorithm or the Singular Value Decomposition, pseudoinverses can be constructed in which the singularities can be avoided, but that is beyond the scope of this work. Furthermore, it is said that a system of linear equations is homogeneous if it can be written in the form
. Now, assuming that the configuration of the robotic system (13) is redundant, the Jacobian matrix
has more unknowns than equations (
) with range
for each
, and taking into account that the homogenous equation has a not trivial solution, the system could have infinite solutions. In this case, suppose the equation
is consistent for a
given and letting
be a particular solution, the solution is the set of all the vectors of the form
with
as any solution of the homogeneous system
.
A viable solution method is to formulate the problem as a constrained linear optimization problem
yielding the particular solution
On the other hand, the null space of
in
is the set of velocities that do not produce any effect over the actions of the heterogeneous robotic set. In that case, it is necessary to rethink the cost function, expressing it as
that yields the homogeneous solution
Thereby, inserting Equations (16) and (18) into (14), it yields the proposed law of control
where the first term on the left-hand side is the particular solution
and second term
of this equation belong to the null space of
.
For the purposes of this work, the second term in Equation (19) represents the projection on the null space of the robotic systems, where
is an arbitrary vector that contains the velocities associated with the shape and orientations of the robotic set. Therefore, any value given to
will affect the internal structure of the formation only, but not the final control of the first objective at all. The null space created by the high-level task matrix allows each velocity to be projected onto that space, where the sub-tasks compete to solve the problem in different ways. However, the velocities of the second task need to be calculated and included in
, being
where
is the Jacobian matrix, which contains the secondary objectives.
Remark 3: The consideration of having more than one robot working on the same purpose allows achieving secondary tasks at the same time collectively. To achieve these objectives, a behavior-based controller can be implemented to split tasks into sub-objectives, solving problems separately, and finally combining them to obtain the final solution.
4.2. Formation and Following Control
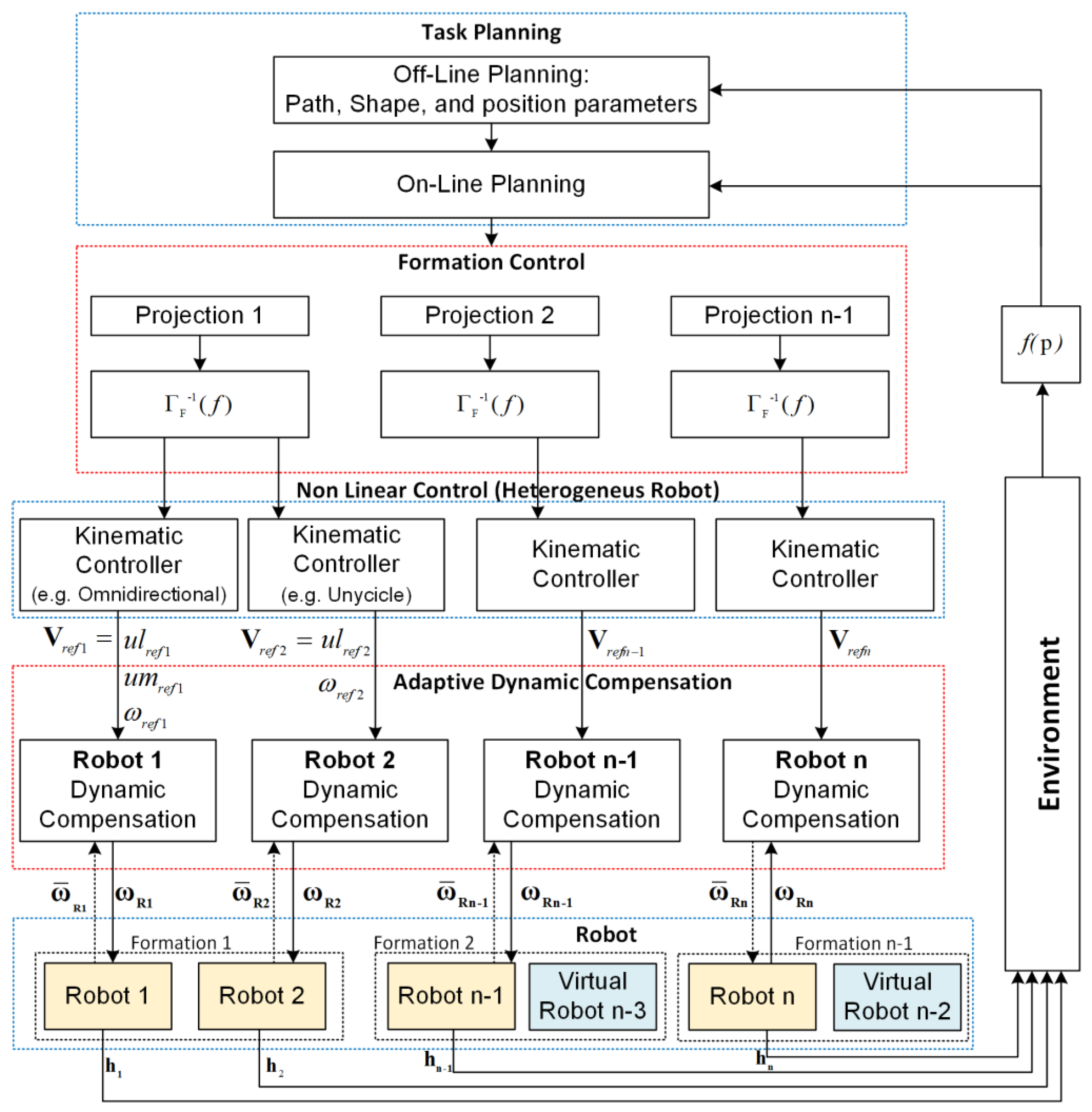
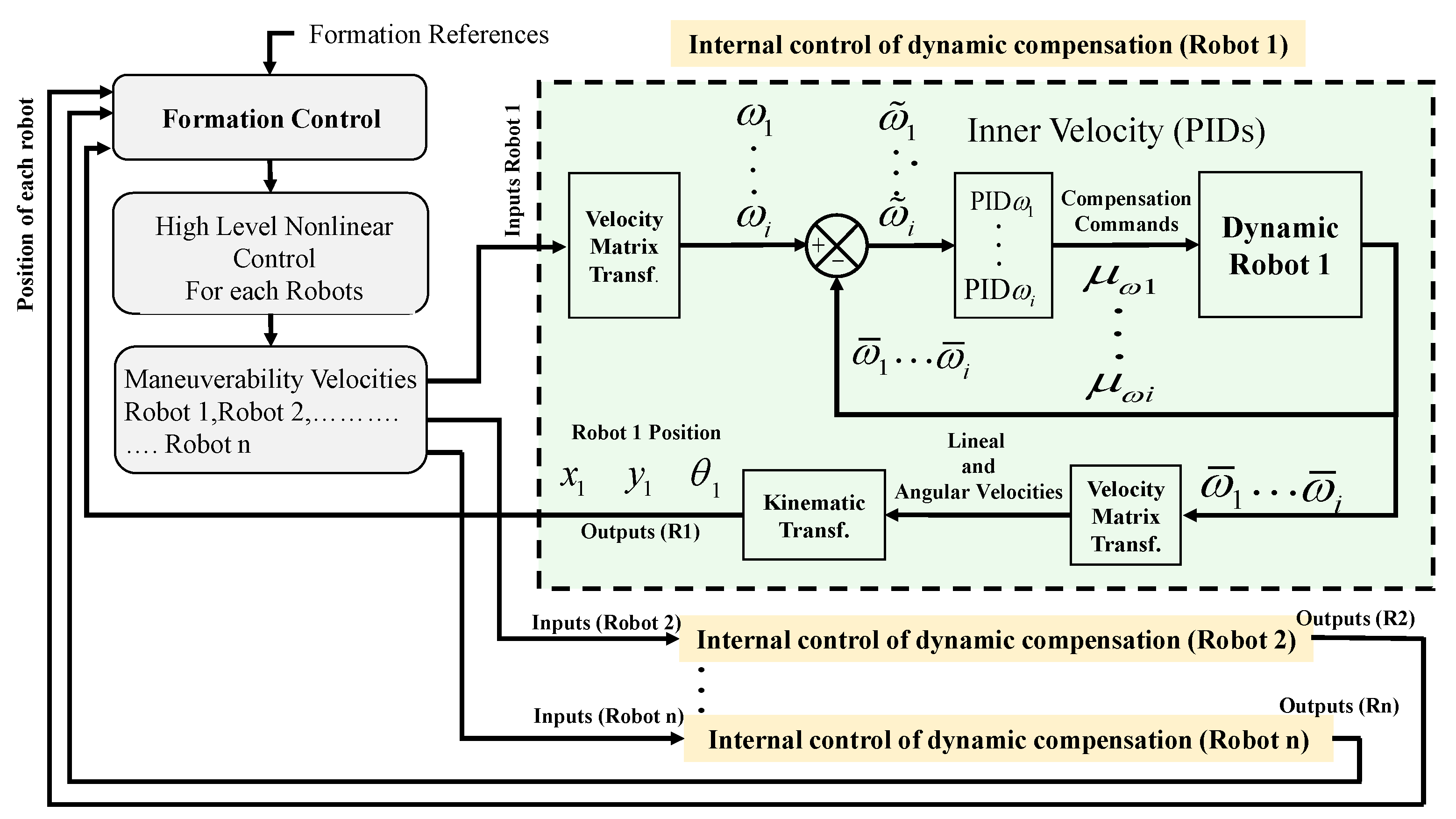
The cooperative control of heterogeneous mobiles considers that the type of robots incorporated into the formation system includes its own kinematic controller and a dynamic compensator, therefore, for the formation control, the type of system included is transparent. This section briefly describes the basic control scheme to maintain the formation of many robotic systems, a basis to integrate more robots in a scalable way.
Figure 3 shows the control structure implemented for this work, denoting both the controllers which maintain the formation, orientation, and following of the desired path and the controllers that correct the final actions of each robot.
The adoption of the null-space approach was due to the possibility of treating tasks and subtasks separately, which were unified at the end to get the control actions. Since the main task does not conflict with the secondary task, the designer of the controllers selected the task hierarchy. By means of this, different control objectives can be achieved, e.g., maximum manipulability, energy saving, obstacle avoidance, and so on [
29]. In this case, the main task was to reach that the set of robots followed a path, while the secondary task was to maintain the geometric shape and orientation of every projection formed by the vehicles.
The unified Jacobian matrix in Equation (9) contains both the first derivatives corresponding to the positions of the center point of a formation, as well as the distance and the orientation between the two robots forming the projection. For the calculation of different control actions, it is taken into account that the Jacobian matrix in Equation (9) is divided into two parts:
where
are the first derivatives of the midpoint positions of the projection,
are the first derivatives of the distance and orientation angle,
corresponds to the first variable to be calculated and
the second variable to calculate.
Considering the proposed splitting in Equation (21), differentiated controls can be proposed to achieve both the primary and secondary objectives. The work proposes as the main objective of the point of interest
(redefined as
for the application of the proposed controller) follows a profile not parameterized in time, with a velocity
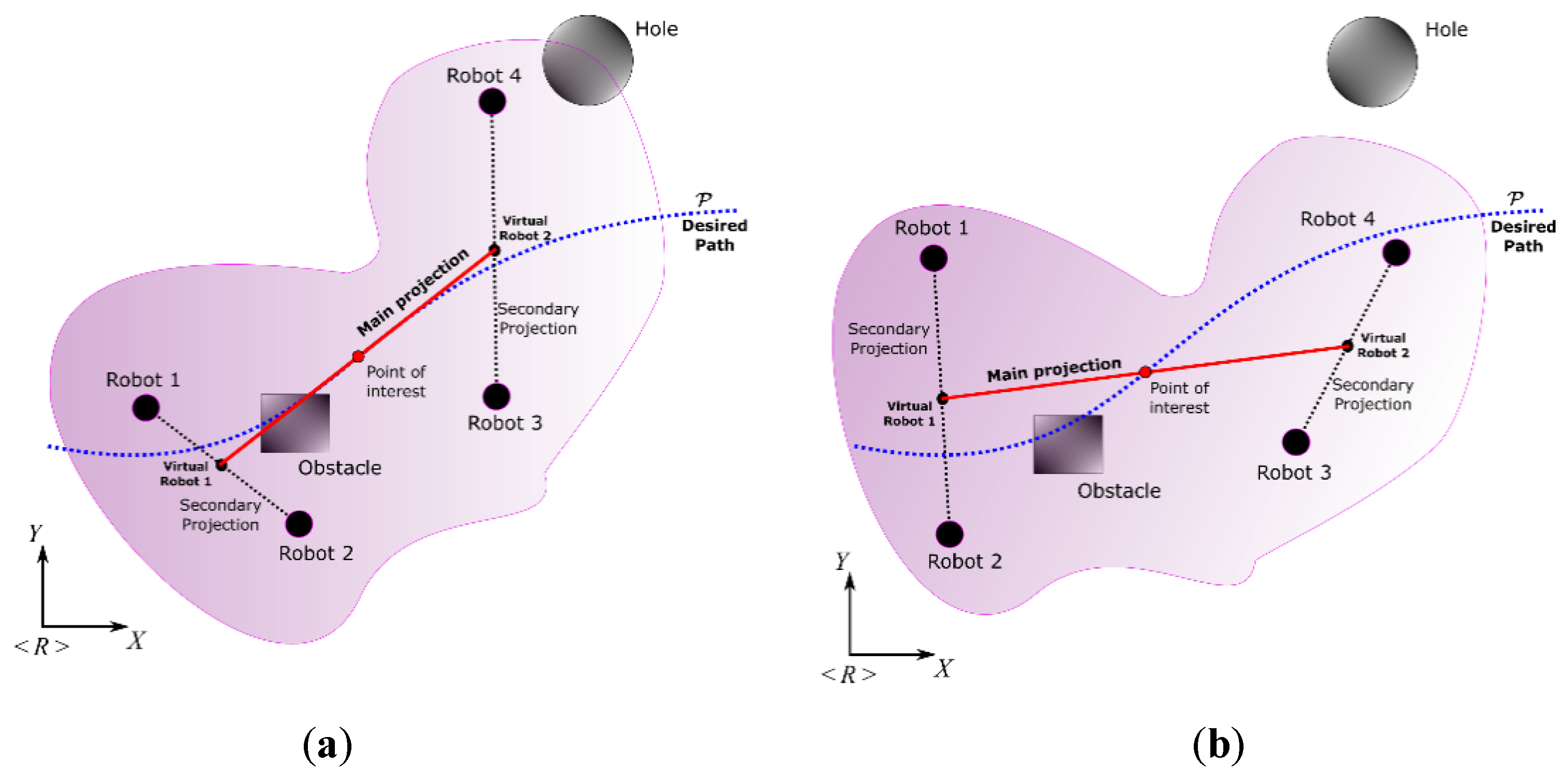
imposed by the designer. On the other hand, the secondary objective was to modify the formation of robotic systems, as long as they did not conflict with satisfying the first objective. Having a formation based on projections, the main projection
plays an important role since it is the basis for calculating the velocities that the rest of the projections will adopt to fulfill the tasks. Additionally, having a main straight line that can be projected and oriented according to the requirements of the controller designer allows locating the robotic systems to be agreed upon. Contrast the possibilities (a) and (b) of
Figure 4; the first projection has a different length and orientation to the second projection. However, the main objective was achieved in both, where the variation in distances and secondary orientations did not conflict with the main task. The following paragraphs describe the characteristics mentioned in more detail.
(a) Path following controller
To achieve that the center of the projection
follows the desired path, the proposed controller is defined by
where
is the first part of the general Jacobian that determines the characteristics of the robotic set to follow the desired path, with
. The obtained response in
are two pairs of velocities that will be applied to the robots located at the ends of the projection, whether physical or virtual. These velocities are due to maintain the point of interest in the desired path but leaving aside the errors of the distance between the robots and the angle formed with respect to
. It is important to note that the main projection (where the point of interest of the transported object is located) can have the desired velocity, in this case,
, while the rest of projections will have velocities generated by the main controller, i.e.,
.
(b) Formation and Guidance Control
This part of the control allows the establishment of the desired formation
as a secondary objective, providing flexibility to projection modifications between the robots in applications where the tasks of the tracking targets were required, e.g., given the presence of the obstacles on the road. The second part of the Jacobian matrix is considered in this controller, which provides the characteristics of formation and orientation
of both robotic systems. In this way, the controller is defined by
Contrary to a), this controller aims to correct the shape of the
projection, zeroing distance errors between the robots, and general orientation of the robotic pair.
(c) Unified Controller
This section defines the priority in the control tasks that the group of robots will have. The work proposes the positioning control of the point of interest (in this case, the midpoint of the main projection). Therefore, the task that does not conflict with the main control objective is the form and orientation of the projection. Based on (19), the proposed final controller is presented in the form
where the second part of this controller shows the attempt to correct the errors so long as it does not interfere with the main task, which is carried out by the first part of the controller. This fusion allows having the desired velocities for the pair of robots that form the
projection.
Remark 4: Cases (a), (b), and (c) are applicable to one of thepossible projections, requiringcontrollers to be programmed as projections exist. This facilitates the scalability of the system, while at the same time making the robotics set more flexible by giving desired parameters to each of the projections at any time.
Remark 5: In the case study,can be imposed by the controller designer, but it must be directly related to the error reduction, i.e., a velocity can be configured with which the shape is corrected to desired parameters, but it must have a null value in the event the objectives are achieved, otherwise, errors caused by the same correction action can appear. One way to solve this is to force it to be immersed within the weight given by.
(d) Stability Analysis
Rewriting the proposed control law (24) in a way
where
and
represent a pseudo-inverse matrix notation, the analysis can be developed in a simpler manner.
Now, the analysis is done for the control of the main objective, in addition, it is considered that the secondary objective of the formation is not affected when Equation (25) is multiplied by
.
then, as
and
, Equation (26) is reduced to
The stability analysis for Equation (27) is done by means of the feedback, i.e., if it is considered that Equation (21) be perfect tracking then,
, and taking into account that the error for the primary objective is defined as
such that
therefore, replacing the velocity for the main objective
in Equation (28) and also considering that the desired velocity for the path is
:
Next, the differential derivative is applied to obtain
and the same way to
, then the expression
Simplifying
and grouping Equation (30) with the current states
and the previous state
there is
Now, taking account that
and
represent the current error and the previous error, respectively, Equation (31) is reduced to
and grouping similar terms, it results that
The primary objective error
is separated to have the following expression
therefore, stability in discrete time is realized by the
Z transform, and taking account the analysis for each diagonal matrix value
so
Finally, the poles of the function obtained in the following way are analyzed:
Thus, for the control to be stable, the
Z plane pole must be inside the unit circle. Therefore, the values of the diagonal matrix must be considered as
, hence the control error
come close to being zero when
, then the system is asymptotically stable.
Now, as a second step, we proceed to effectuate the analysis for the secondary objective of formation. In a similar way to the primary objective, multiply both members of the control law by
, then Equation (25) it is written as:
According to [
28], where an important property of Jacobian matrices is analyzed when one does not have a conflict between them, i.e., that it is feasible to fulfill the two tasks simultaneously and completely, it results that
Therefore, if Equations (36) in (37) are replaced, the below expression is obtained:
Additionally, considering Equation (21) to be perfect tracking, there is
. Performing a similar procedure of analysis that Equations (27) in (39), it is concluded in the same way that
, therefore the values of the diagonal matrix must be considered as
, hence the control error
come close to being zero when
, then the system is asymptotically stable.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}