1. Introduction
The modeling of bicycle rider control is a common research topic. Van Lunteren et al. [
1] used classical control methods to model rider control in order to study the effect of drugs, alcohol, and other factors on the ability of the rider to stabilize a bicycle. In a control-theoretical study, Hess et al. [
2] developed a bicycle rider model that is similar to an aircraft pilot model. This model includes gain values, a second-order filter, and a preview time.
Another approach to modeling rider control is optimal control. Schwab [
3] used an LQR (Linear Quadratic Regulator) controller with full state feedback to determine the control that is required for a rider to stabilize a bicycle when leaning and steering. Sharp [
4] also used LQR but for optimal control tracking with a road preview for a bicycle. Ryuma Hatano et al. [
5] derived an accurate bicycle model that describes its characteristic behavior. A state-dependent Riccati equation (SDRE) control was applied to the model to achieve stabilization. David Rodriguez-Rosa et al. [
1,
6] proposed a design for an adaptive controller for an autonomous bicycle. The controller is robust to disturbances, such as wind or uneven surfaces, and minimizes the energy that is required for lateral stabilization of the bicycle. Amit Ailon et al. [
7] proposed a control method that stabilizes the bicycle at a desired lean angle for a non-linear non-minimum phase model of a two-wheeled vehicle. Lyapunov stability theory is used to establish a continuous feedback loop for the steering input signal that obtains exponential stability at a desired lean angle.
In a review of the application of optimal control theory in vehicle dynamics, Sharp and Peng [
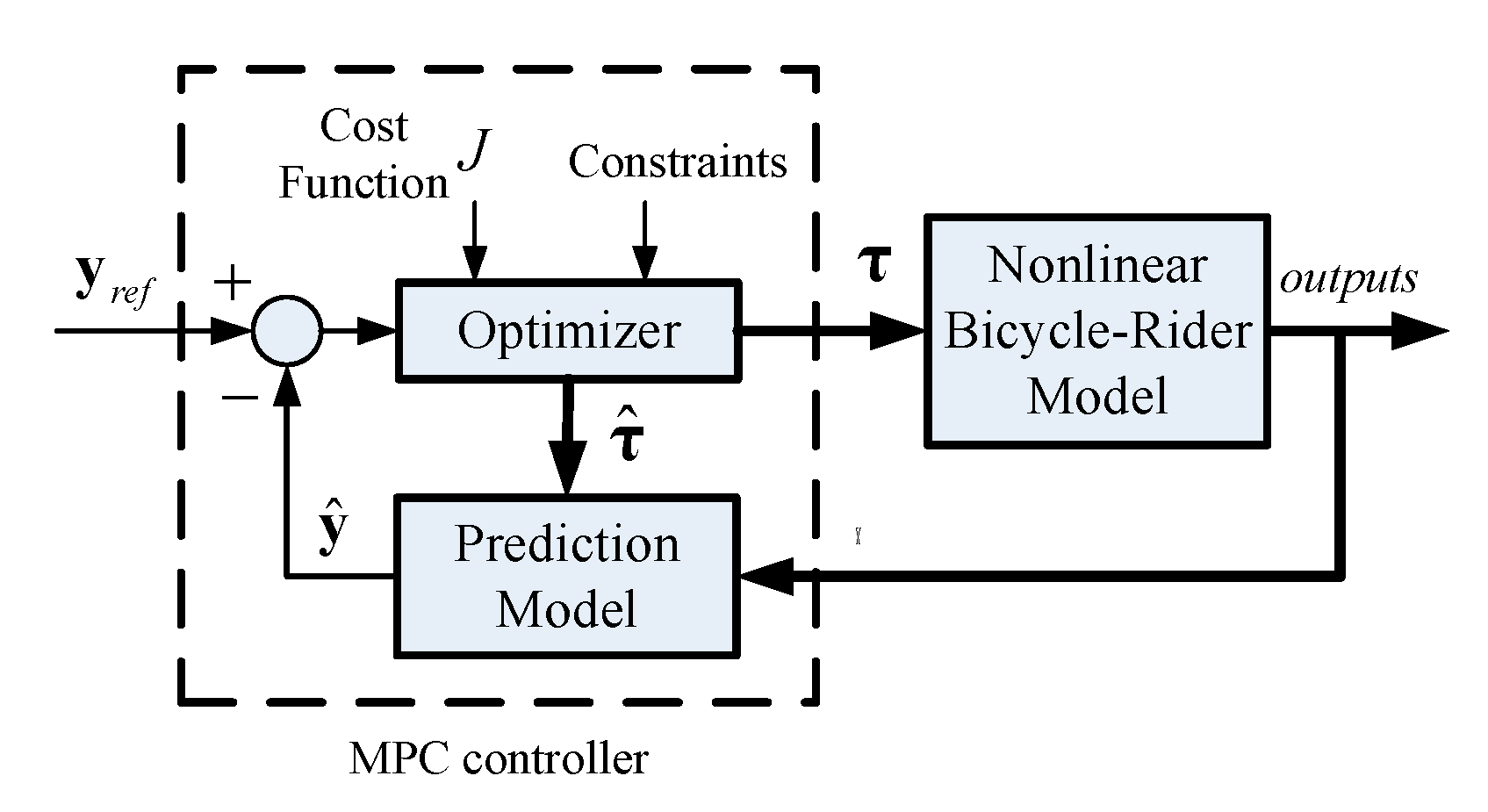
8] noted that model predictive control (MPC) is a promising solution for modeling drivers and riders because its characteristics are pertinent to driving and riding strategies. This method accounts for the vehicle dynamics, the driver/rider skills that are associated with a system prediction model, and the variation in the cost function for the optimization problem. The view of the driver/rider while riding and the physical limitations of the situation are simulated by using preview reference information and the ability of MPC to deal with constraints. Dole et al. [
9] used predictive control theory to model a car driver’s steering inputs during a yaw-sideslip incident. A comparison the results for an unconstrained MPC and a LQR with signal preview showed that MPC allows optimal control with an abbreviated prediction horizon.
For a single-track vehicle, Frezza et al. [
10] used MPC to develop models of motorcycle racers. The models allow good control in simulating a set of more than 70 maneuvers with different vehicle models. Rowell et al. [
11] made use of PC to model lane-change maneuvers for a motorcycle. The feasibility of predictive control was verified by the simulation results for various weighting matrices and preview distances.
Recently, Massaro [
12,
13] presented a virtual rider that used predictive control to guide a non-linear motorcycle along target profiles for roll angle and speed. The control inputs for this virtual rider are comparable to a real rider’s inputs, as measured during a real maneuver. Although MPC is suited to modeling both a car driver and a motorcycle rider, few studies have used MPC to model a bicycle rider.
There are many applications based on the gyroscopic effect in a large range of technical fields. This effect has been used for both active and passive stabilization of unstable dynamic systems due to its ability to generate a large torque and a fast response. Townsend and Shenoi [
14] discussed the gyroscopic effect and applied it to stabilize a ship’s roll motion. In the field of aeronautical engineering, the gyroscopic effect is widely used to guide the altitudes of spacecraft and satellites in space [
15,
16]. In addition, Lemus et al. [
17,
18] conducted experiments using an inverted pendulum test bench instead of a real human to enhance human balance, which is also based on the gyroscopic effect.
Cycling contributes many benefits, such as being healthy and environment-friendly, as well as easing traffic congestion. Therefore, more governments are promoting and encouraging their citizens to cycle. However, cyclists have a relatively high injury risk for road crashes [
19]. Hence, improving the bicycle’s stability is highly demanded and has become the subject of many studies. Steering using the handlebars [
20,
21] and the gyroscopic effect of spinning flywheels are used to stabilize a bicycle. P.Y. Lam [
22] used a control moment gyro as an actuator to stabilize a small bicycle. By using a PD (Proportional and Differential) controller, the bicycle was successfully balanced and could move forward and backwards, and could turn through a small angle. H. Yetkin et al. [
23] proposed an autonomous bicycle, and it was controlled by the gyroscopic effect of a flywheel.
A sliding mode control algorithm is applied for stabilization and has been experimentally proven to provide good performance. Hsieh [
24] proposed a gyroscopic balancer for a rider-less bicycle that stabilizes a bicycle that is stationary or moving forward. In Reference [
25], Chi extended this work by developing an adaptive fuzzy sliding mode controller for the balancer system. To develop an active safety system for single-track vehicles, Różewicz et al. [
26] proposed a mathematical model of a bicycle that is steered by a control moment gyro.
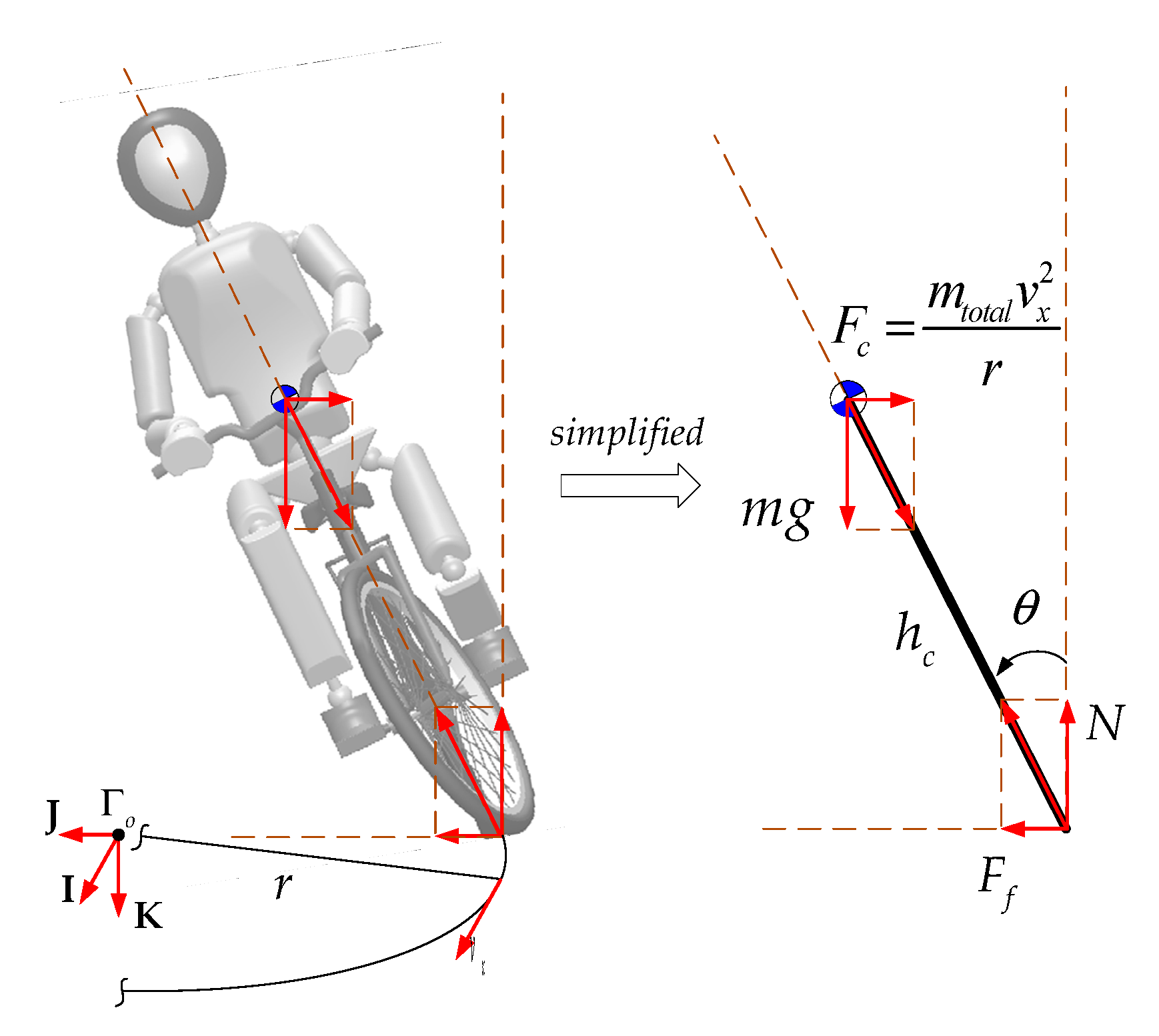
A review of the research on the behavior of a bicycle under the gyroscopic effect of two spinning flywheels shows that an active stabilization assistant system used in single-track vehicles is possible. This system increases the bicycle’s stability and controllability and enhances the rider’s comfort and safety. If it is under the assumption that the rider’s body is fixed to the bicycle frame and that there is no slipping at the contact points between the road surface and the tires, the balancing problem for a bicycle is the same as the problem of balancing an inverted pendulum.
An inverted pendulum used as a benchmark for the balancing problem is common in studies that pertain to control theory, robotics, and vehicle engineering. In Reference [
27], this method is used to simulate an electric bicycle with power steering systems. A gyroscopic inverted pendulum is applied to benchmark an adaptive control algorithm for a single-wheeled pendulum robot in Reference [
28]. The experiments proved that the pendulum model with the single-wheel pendulum robot was valid. Similarly, an inverted pendulum is used to analyze the validity of a stabilizing device before applying it to a bicycle [
29].
In a previous work by the authors, an active stabilizing assistant system (ASAS) for a bicycle that uses the gyroscopic effect of two flywheels was designed. A model predictive controller (MPC) was used to control the system and the efficacy of this controller was verified via experiment in References [
21,
30]. In order to determine the system’s performance, this study determines the efficacy of the ASAS when interacting with the rider’s control actions.
Using gyroscopic effects of spinning wheels to stabilize a bicycle was studied in various studies as described in the literature review. Since most of these researches aimed to develop a rider-less autonomous bicycle, the complex dynamic behaviors of the rider when controlling the bicycle are ignored. Although the bicycles in these literatures could be balanced at low speeds and under disturbances, there are difficulties in making a turn. In order to avoid a continuous rotation in the gimbal angles of the flywheels, the bicycles are kept upright and turned at a very low longitudinal speed. This affects the main advantage of single-track vehicles: high mobility. In this paper, we develop an ASAS to assist the riders in stabilizing the bicycles. In order to assert the assisting performances of the ASAS, interactions between the rider’s control actions and the bicycle are considered. The ASAS in this study is aimed to become integrated with a bicycle as a type of single-track vehicle with more stability and high mobility.
The rest of this paper is organized as follows. In
Section 2, the system model of a bicycle with ASAS is presented. In
Section 3, the control strategies for a bicycle–rider system with ASAS are described.
Section 4 discusses the results of control simulations and
Section 5 provides conclusions.
2. System Modeling
In this section, a dynamic model of a bicycle with a rider is introduced. The active assistant system modeling is then established using the gyroscopic effect. A complete model of the bicycle–rider system with ASAS is then developed to allow simulation.
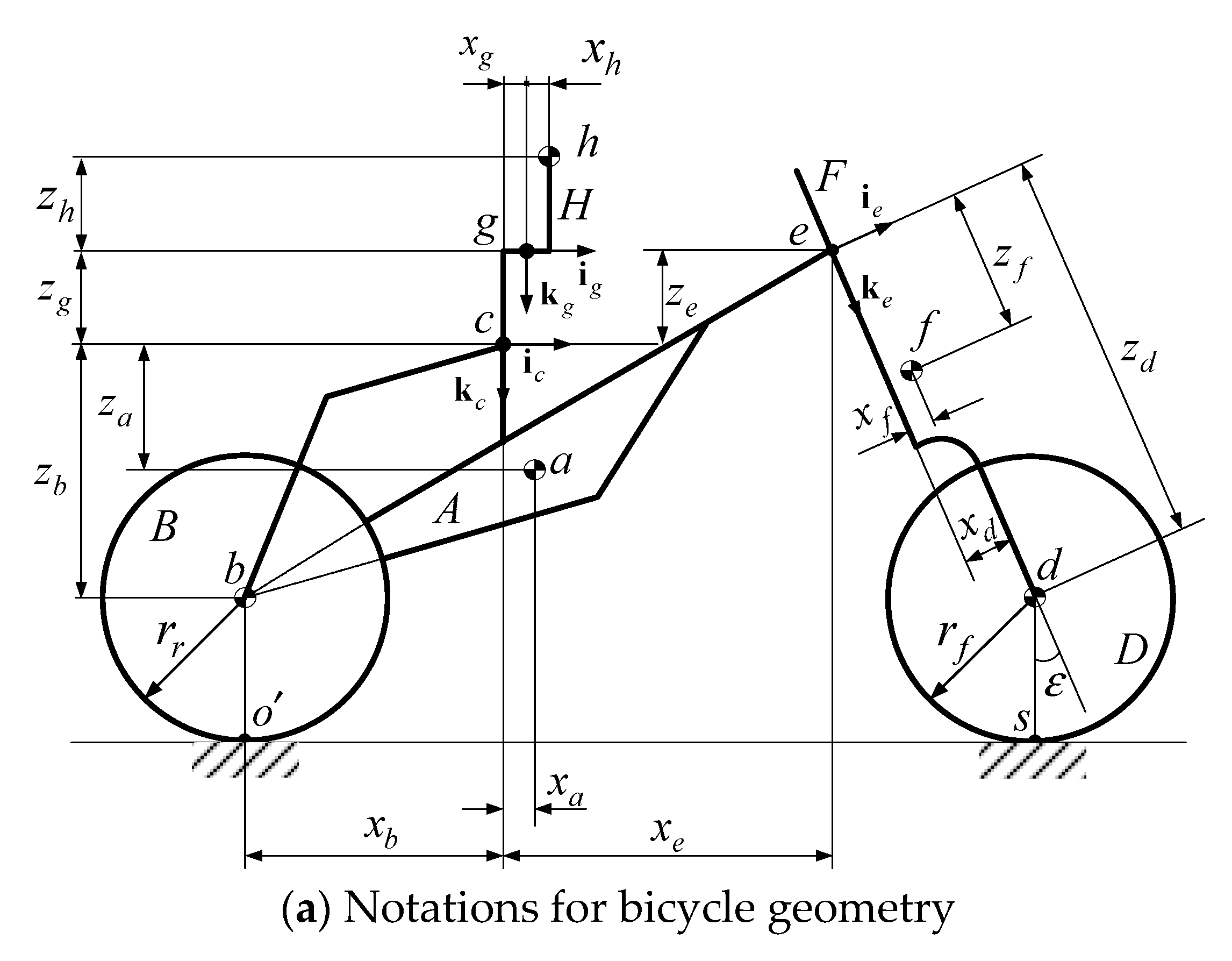
2.1. Bicycle–Rider System
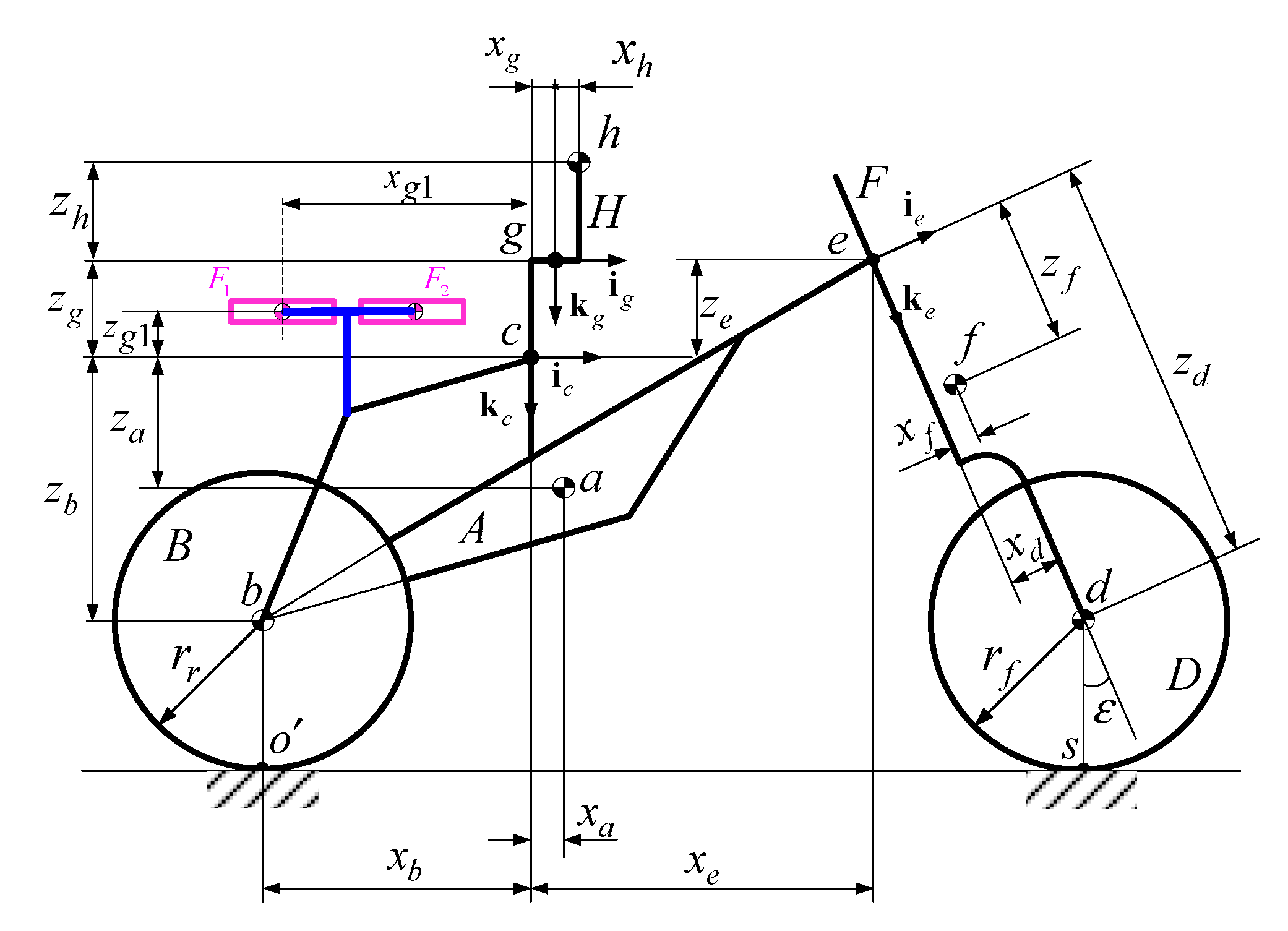
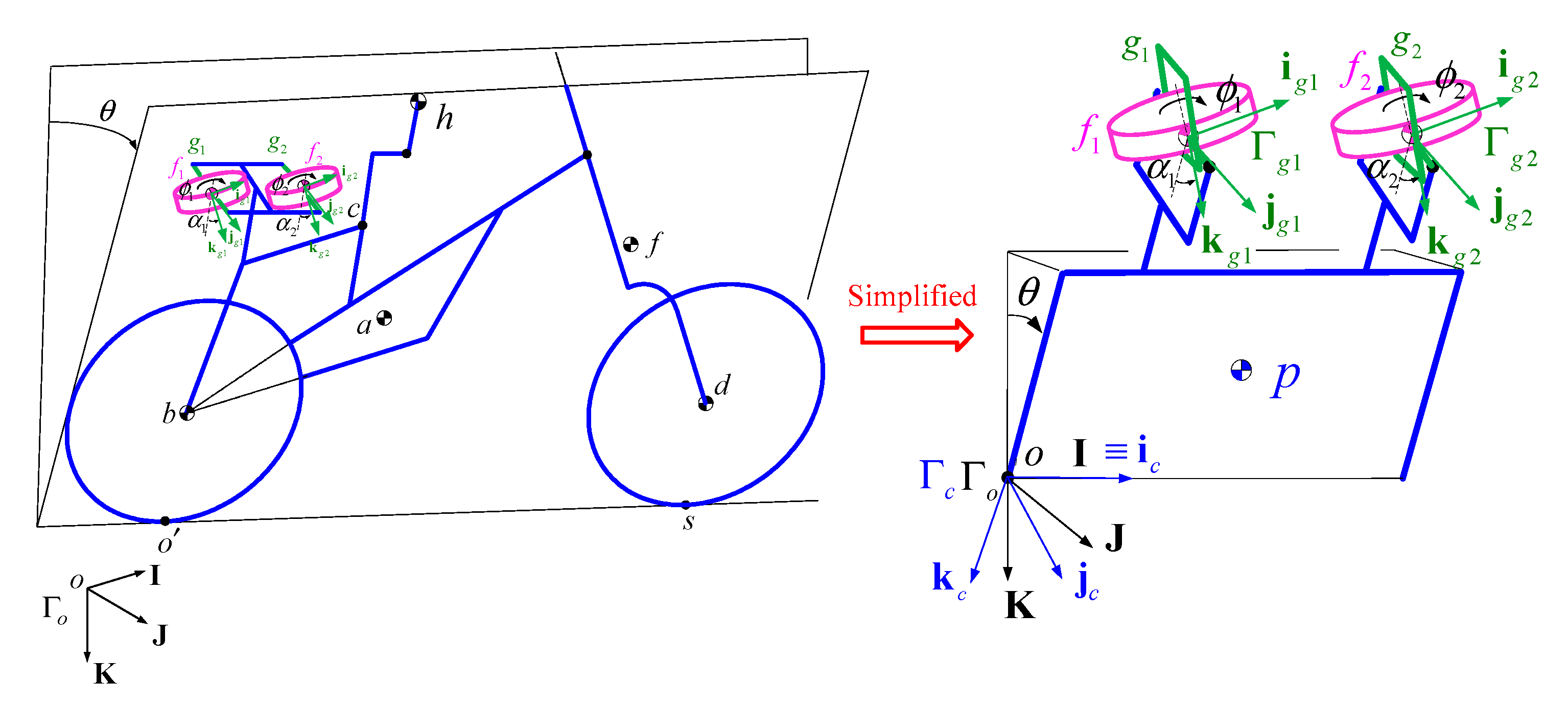
Figure 1 shows the scheme of the bicycle–rider system. The four letters, A, B, D, and F, represent the four rigid bodies of the bicycle: the rear wheel, front wheel, the front forks, and the bicycle frame, respectively. The rider’s upper body, H, can lean on the hinge, g, relative to the bicycle frame. The center of mass of each rigid body is designated by the corresponding lower-case letters, a, b, d, f, and h.
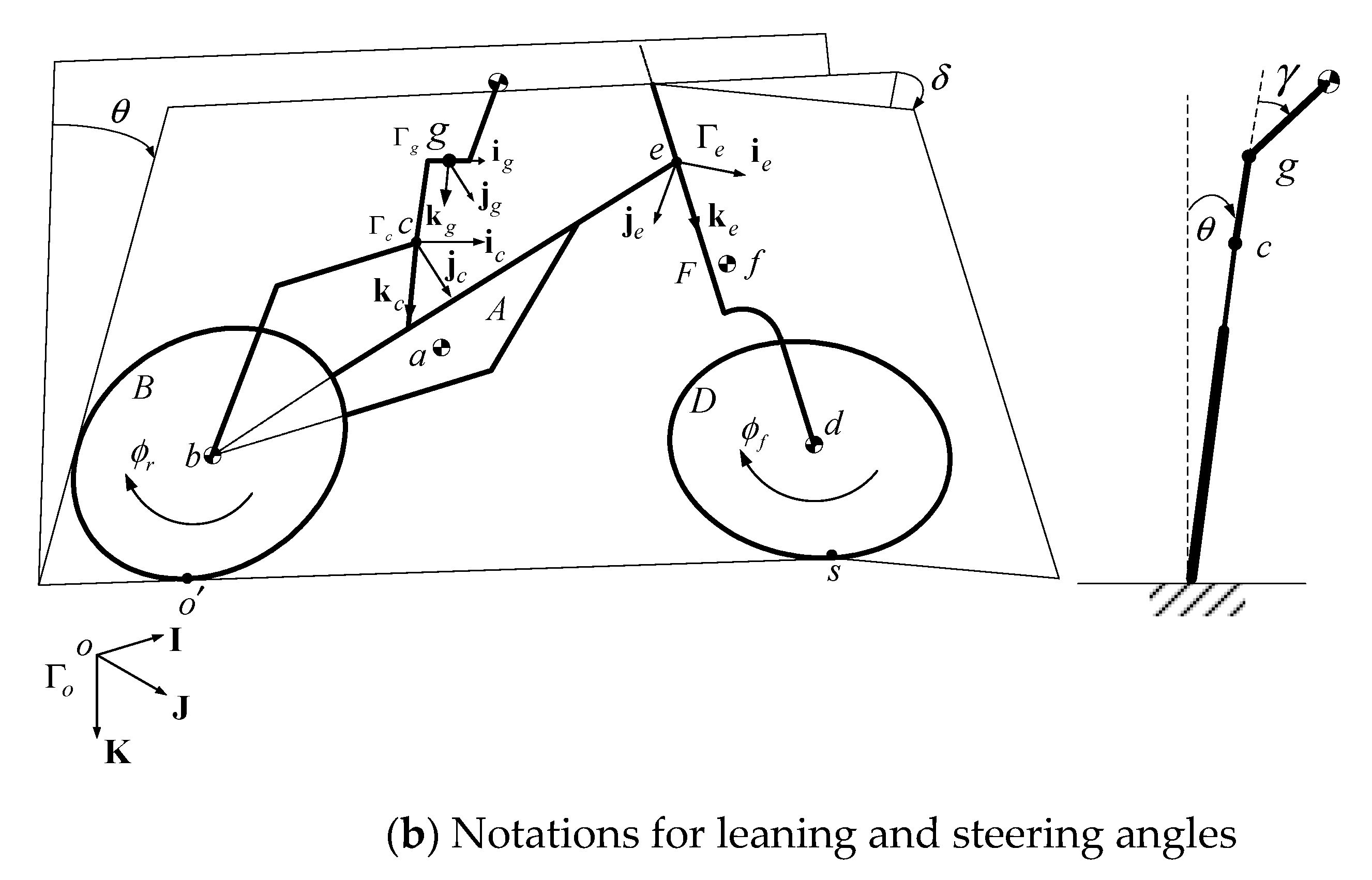
Four coordinate systems (SAE, Society of Automotive Engineers, standard) are used in this model: an inertial frame that is fixed on the ground , a reference frame at the saddle of the bike, a reference frame for the steering angle at point e, and the hinge frame .
The relative positions and orientations of the bicycle to the inertial frame
are described by the six coordinates of the reference point
: the position parameters
and the three 3-2-1 Euler angles
. The steering angle
is defined as the relative rotation of the frame
and
. The angles of rotation of the front and rear wheels are represented by two parameters
and
, respectively. The lean angle of the rider’s upper body is denoted as parameter
. Using these definitions, the generalized coordinates
are written as:
The vector of velocity
is defined as the quasi-velocities of the bicycle body in the reference frame
.
is related to the generalized velocities
by:
where
The transform matrix
is composed of the rotation matrix
from
to
, the transformation matrix for the Euler angles:
and the identity matrix
.
In the model of this two-wheeled vehicle, the contacts between the two wheels and the ground are assumed to have a rolling-without-slipping property. Using the relationships of kinematic contact between the wheels and the ground, four constraint equations can be derived for each wheel, where two are holonomic and two are non-holonomic.
Each contact point is calculated using a new algebraic variable:
for the front wheel and
for the rear wheel. Angle
is between
and
and
is between
and
, as illustrated in
Figure 2. The two algebraic variables extend the number of variables to 12, so the generalized-coordinate and quasi-velocity vectors are expanded to:
All the holonomic constraints are differentiated to yield the velocity form, which, together with other non-holonomic constraints, can be written in matrix form as:
where
is the constraint Jacobian matrix. The equations of motion with constraint conditions then become:
where
is defined as
,
as
,
as
, and
represents the eight Lagrange multipliers or constraint forces that are coupled to the system by the constraint Jacobian matrix
. The details of the derivation of the equations of motion for the bicycle–rider system are given in Reference [
21]. The parameters for the bicycle–rider system that are used in the simulations are shown in
Table 1 and
Table 2.
2.2. Modeling the Active Stabilizing Assistant System
In previous work [
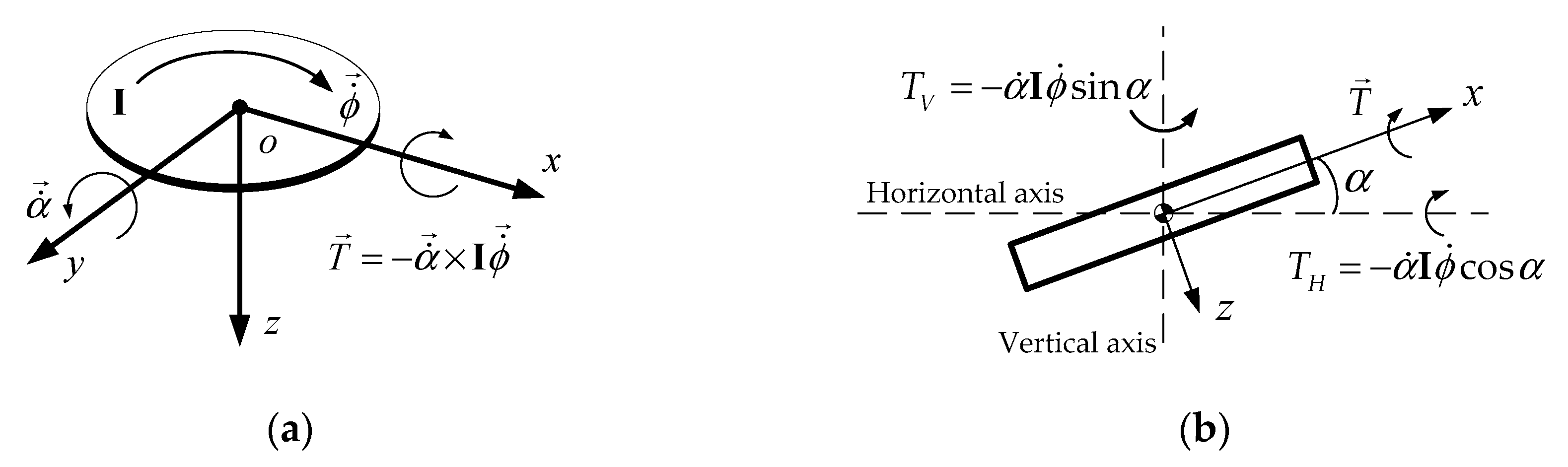
30], a gyroscopic system used according to the gyroscopic effect of a spinning disk is developed, as shown in
Figure 3. A disk with moment of inertia
spins about its
-axis at a speed of
. When its precession angular rate
is controlled, a torque is generated along its
-axis with its magnitude and direction defined as:
At a precession angle
, the generated torques around the horizontal and vertical axes are:
where
is used to stabilize the vehicle system in the direction of roll while
causes uncontrolled yaw motion for the vehicle which is not required.
If two flywheels rotate in opposite directions at the same speed, the torque on the vertical axis of a flywheel cancels with each other. Since the magnitude of depends on the cosine of precession angle , it should be as small as possible to generate a larger effective torque along the horizontal axis. At a precession angle of ±90°, the effective torque on the horizontal axis is zero.
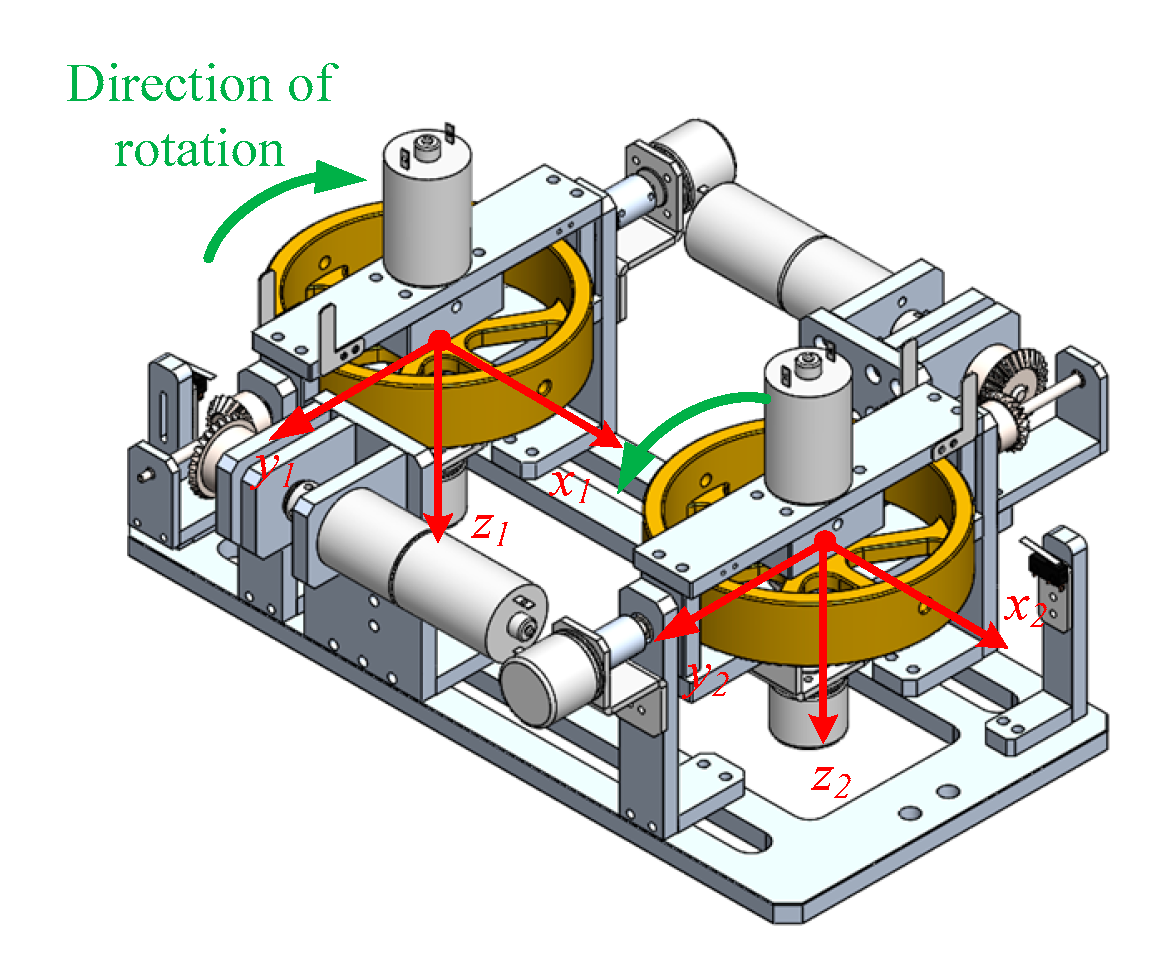
Figure 4 shows the proposed ASAS with two spinning flywheels attached to a gimbal frame including four electric motors and bevel gears. The two flywheels spin in opposite directions to cancel the unrequired effect of a rotating mass on the yaw dynamics of the vehicle. If there are two flywheels, the maximum effective torque generated is the summation of the torque from each flywheel.
2.3. Bicycle–Rider System with ASAS
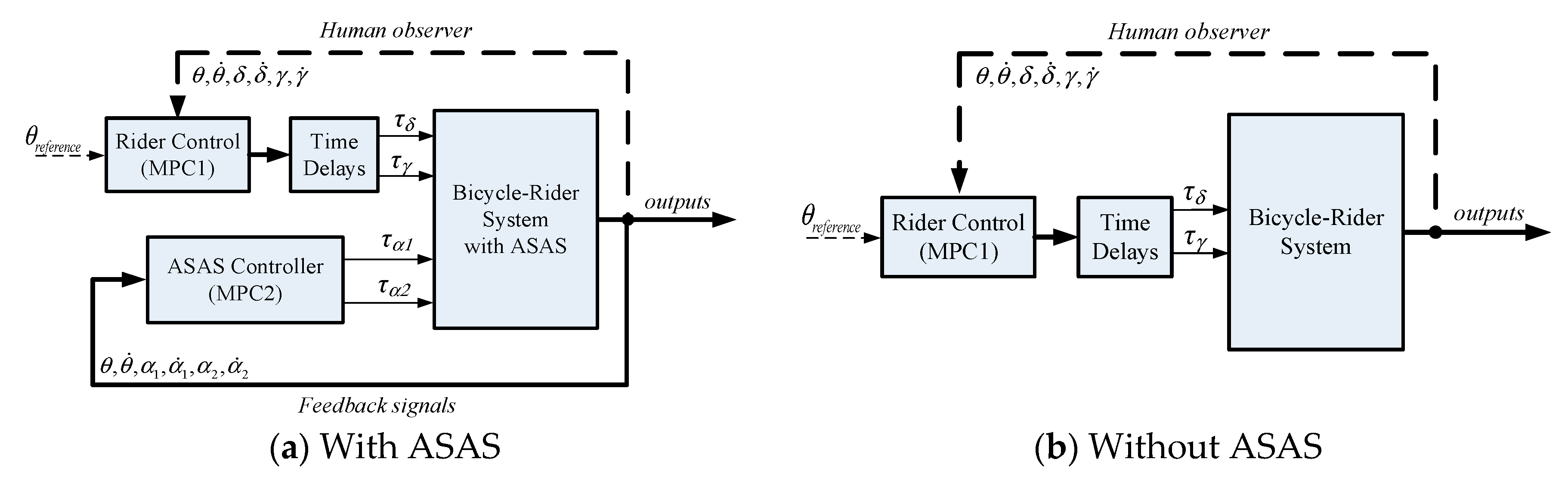
A model of a bicycle-rider system with an ASAS on the rear seat is shown in
Figure 5a. By rotating the gimbal angles of the two flywheels, the ASAS generates an assistant torque that allows the rider to stabilize the bicycle. The magnitude of the assistant torque in the horizontal direction of the bicycle is the sum of the torques that are generated by each flywheel
The dynamic model of the bicycle-rider with an ASAS is derived using the equations of motion from
Section 2. The ASAS with four bodies—D1, D2, F1, F2—is attached to the rear seat, as shown in
Figure 6. The original number of degrees of freedom for the bicycle is increased from ten to fourteen. The coordinates of the bicycle still use the reference point c, between the seat and the vehicle body. Three new SAE (Society of Automotive Engineers) standard coordinate systems are used in the model: a frame
is used to describe the motion of the rider’s upper body, and
and
are used to describe the gimbal angles and the rotational motions of the stabilizing system’s flywheels.
Using the dynamic model of the bicycle–rider system, the motion of the new model is described in terms of the motion of reference point c as shown in
Figure 1. Four additional coordinate variables,
, which are related to the gimbal angles and the angles of rotation of the ASAS, are added to the generalized coordinates
. The equation of motion is then written as:
The quasi-velocity vector is also expanded to
:
The Lagrange equation is used to derive the system’s equations of motion:
where the total kinetic energy is
and the inertial matrix of the system is
. The total potential energy,
and
are the vertical coordinates of the corresponding bodies in the inertial frame
. The coefficient matrices
and
are expanded to
when the identity matrix is replaced by
.
The parameters for the system in
Figure 7 are shown in
Table 3. These parameters are obtained by dimensioning the center of mass of the bicycle bodies using the ASAS system on the rear seat.
5. Conclusions
This study proposed a design for an active stabilizing assistant system (ASAS) for a bicycle. Using the gyroscopic effect of two spinning flywheels, the ASAS generated assistant torque that allowed the rider to stabilize the bicycle in various riding modes. The dynamic behavior of a bicycle–rider system with an ASAS on the rear seat was simulated using a mathematical model. This model has 14 degrees of freedom and was derived using Lagrange equations, with holonomic and non-holonomic constraints on the bicycle’s wheels.
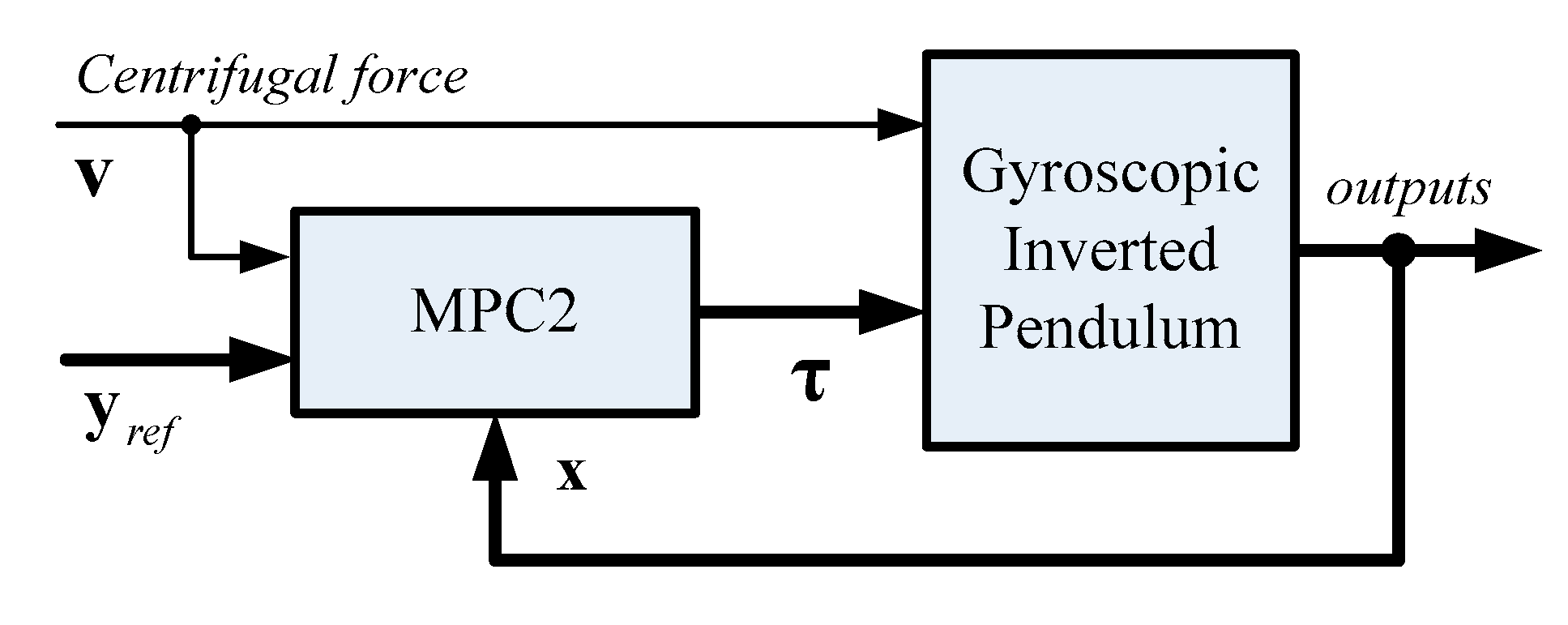
Model predictive controllers (MPCs) were used to control the ASAS. This constituted a three-input, three-output control problem with hard constraints because of the physical limitations of the system. Using an inverted pendulum model for a bicycle-rider system, control strategies for different riding situations were proposed.
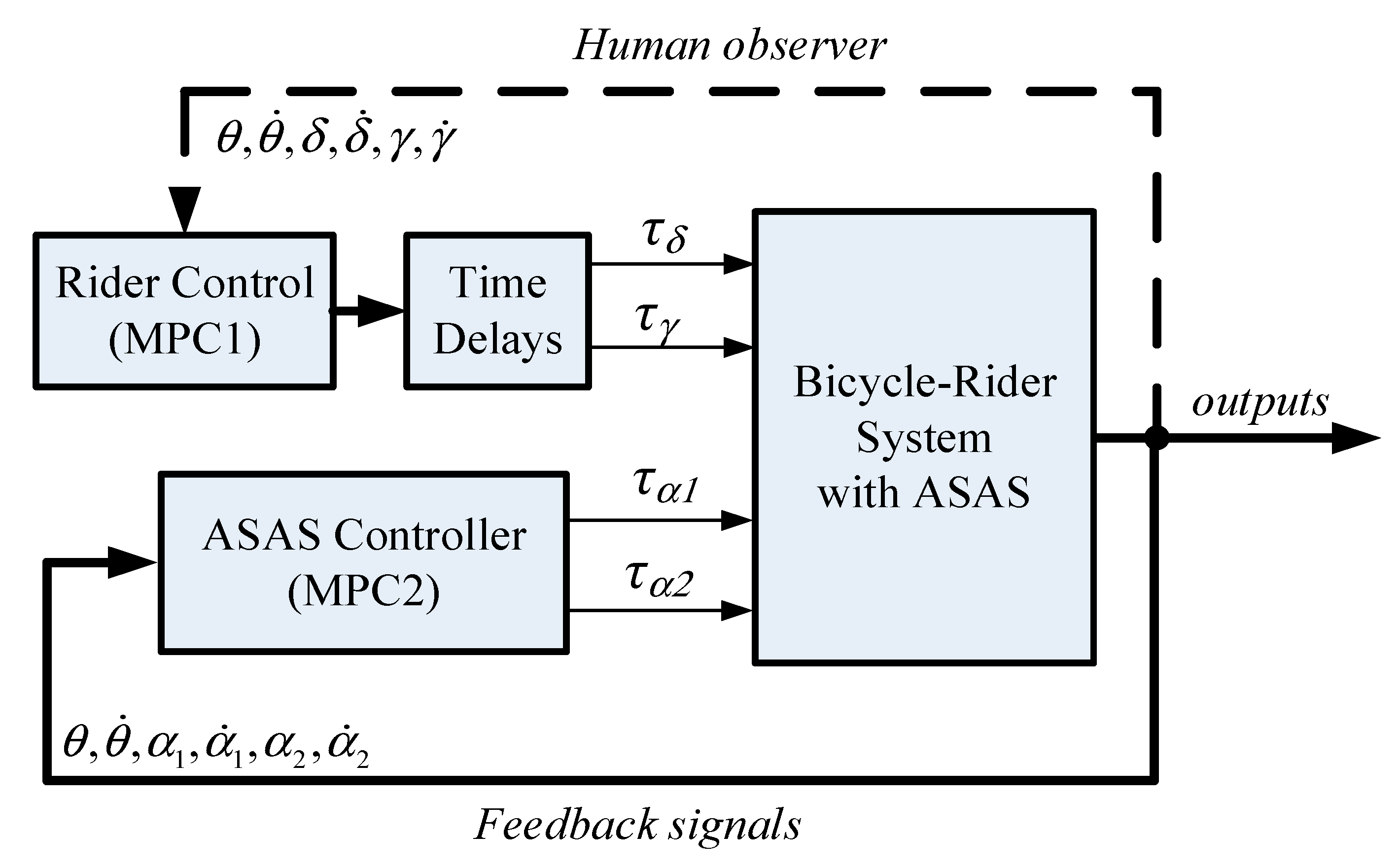
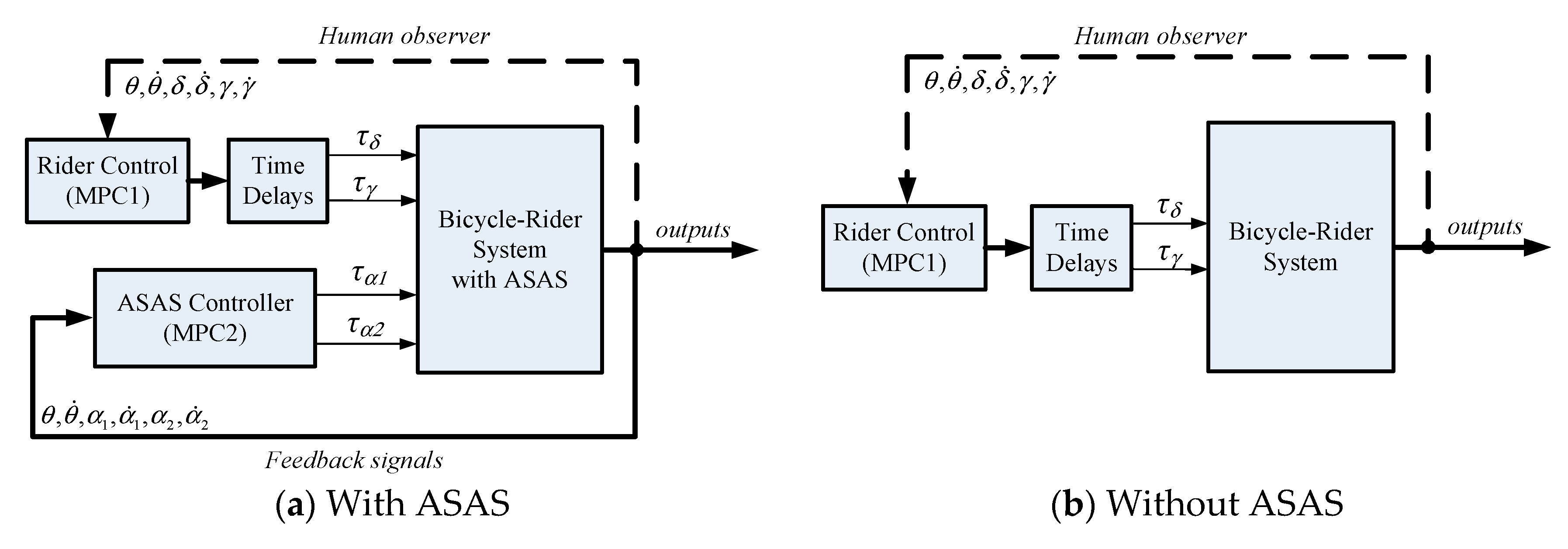
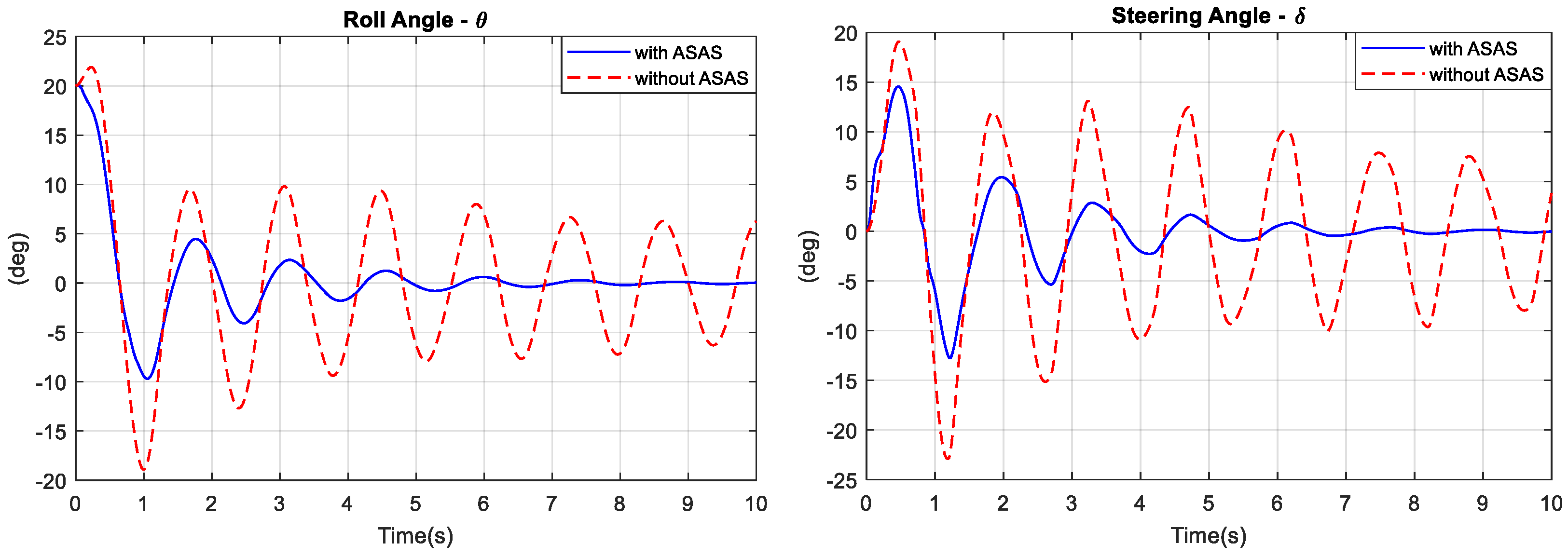
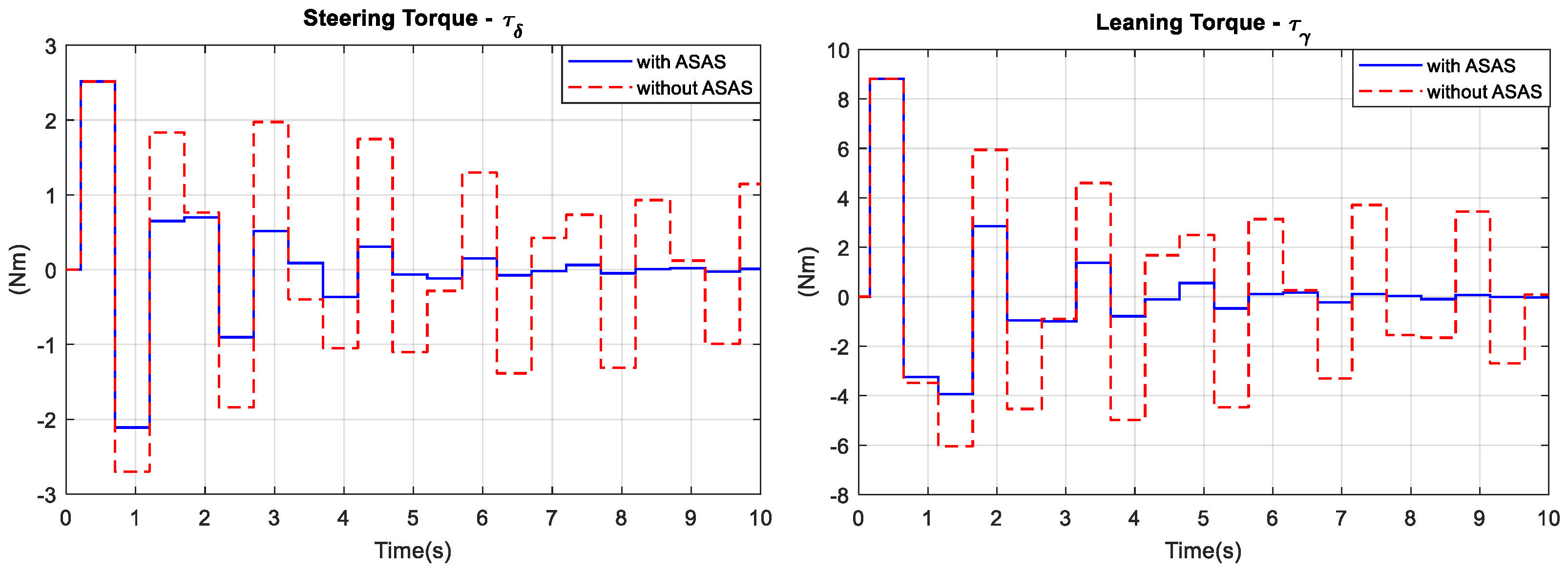
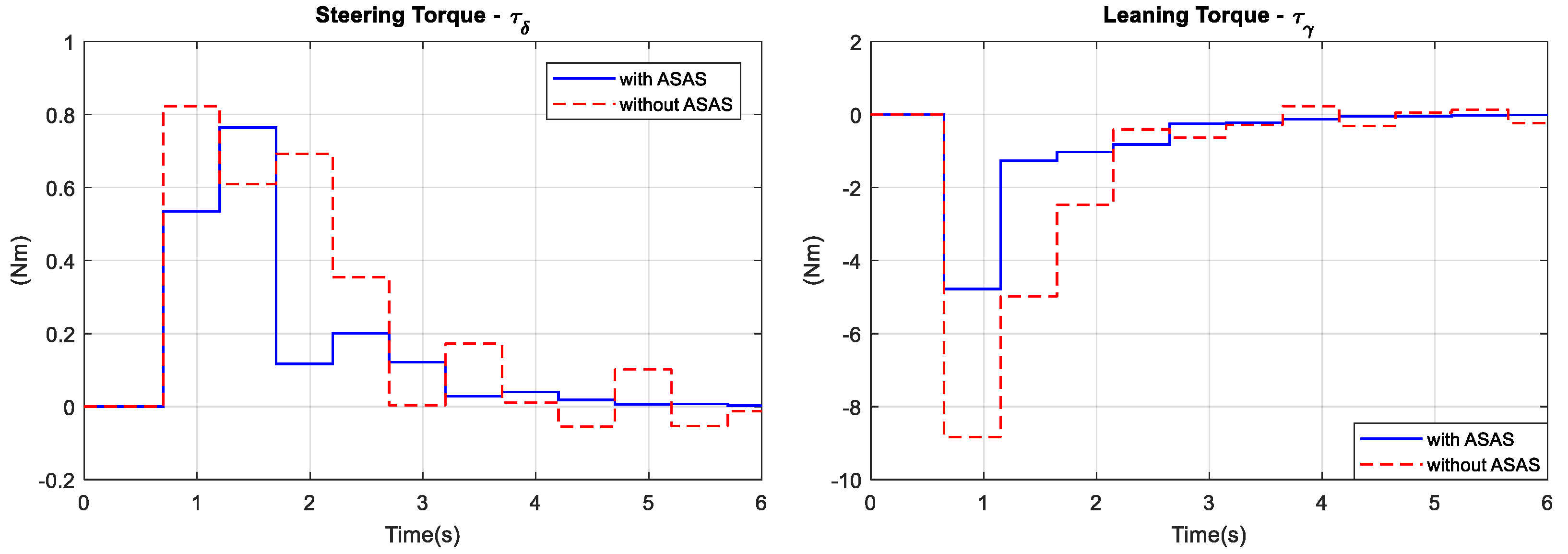
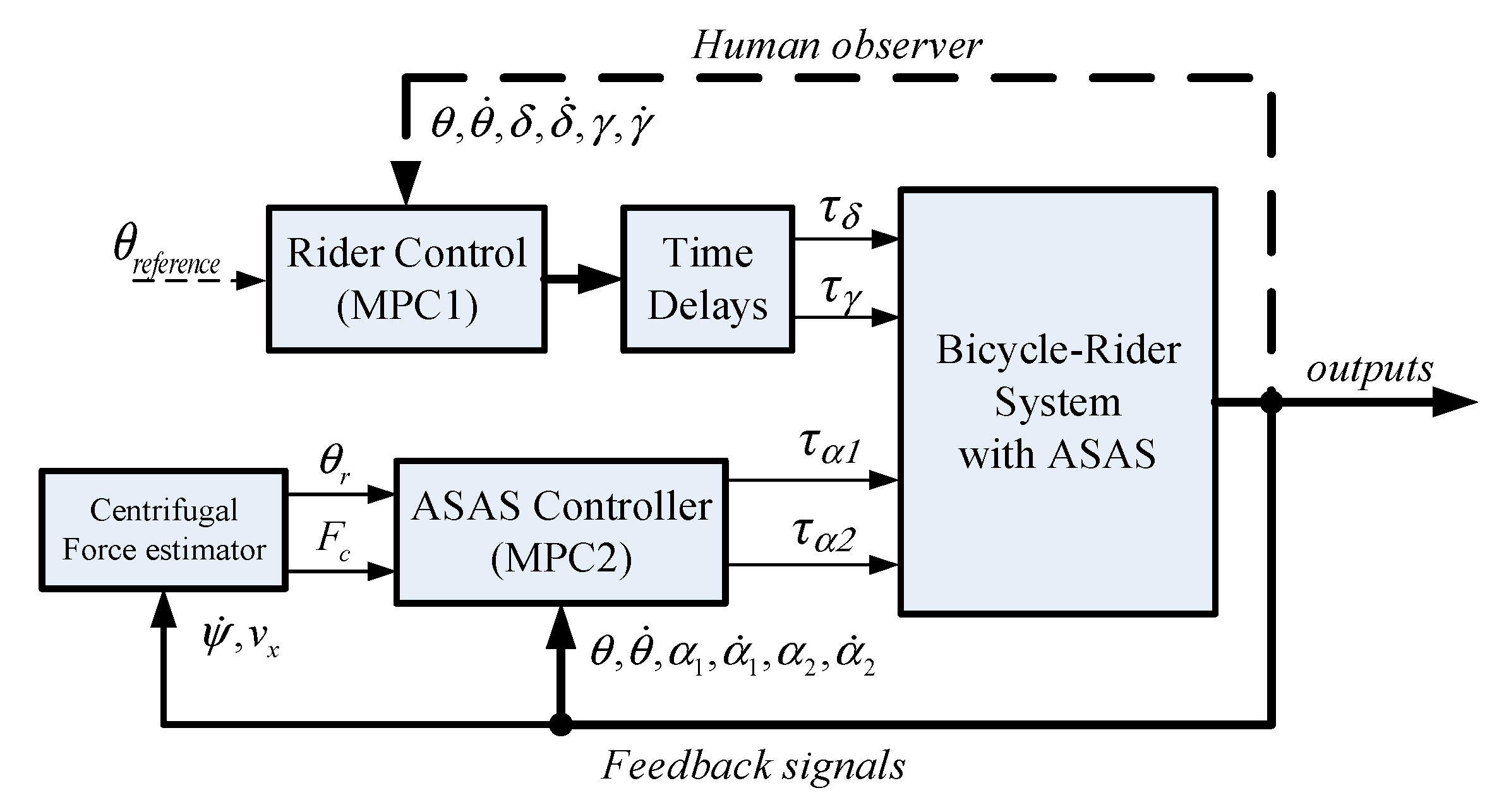
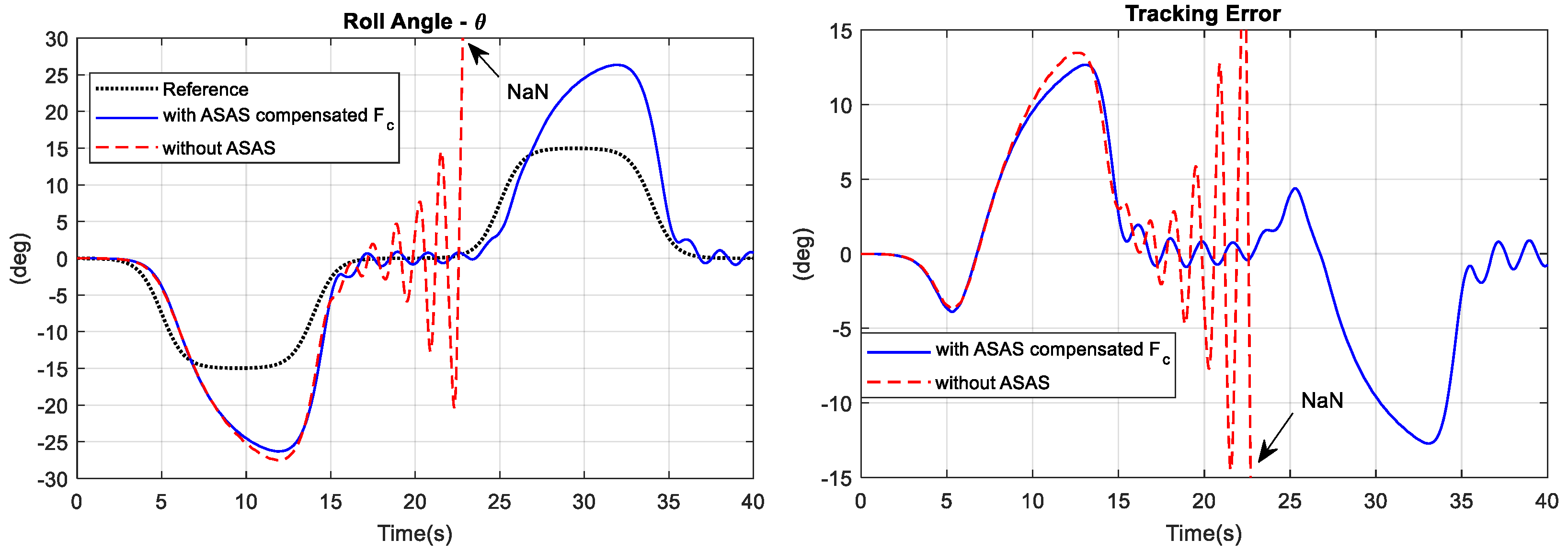
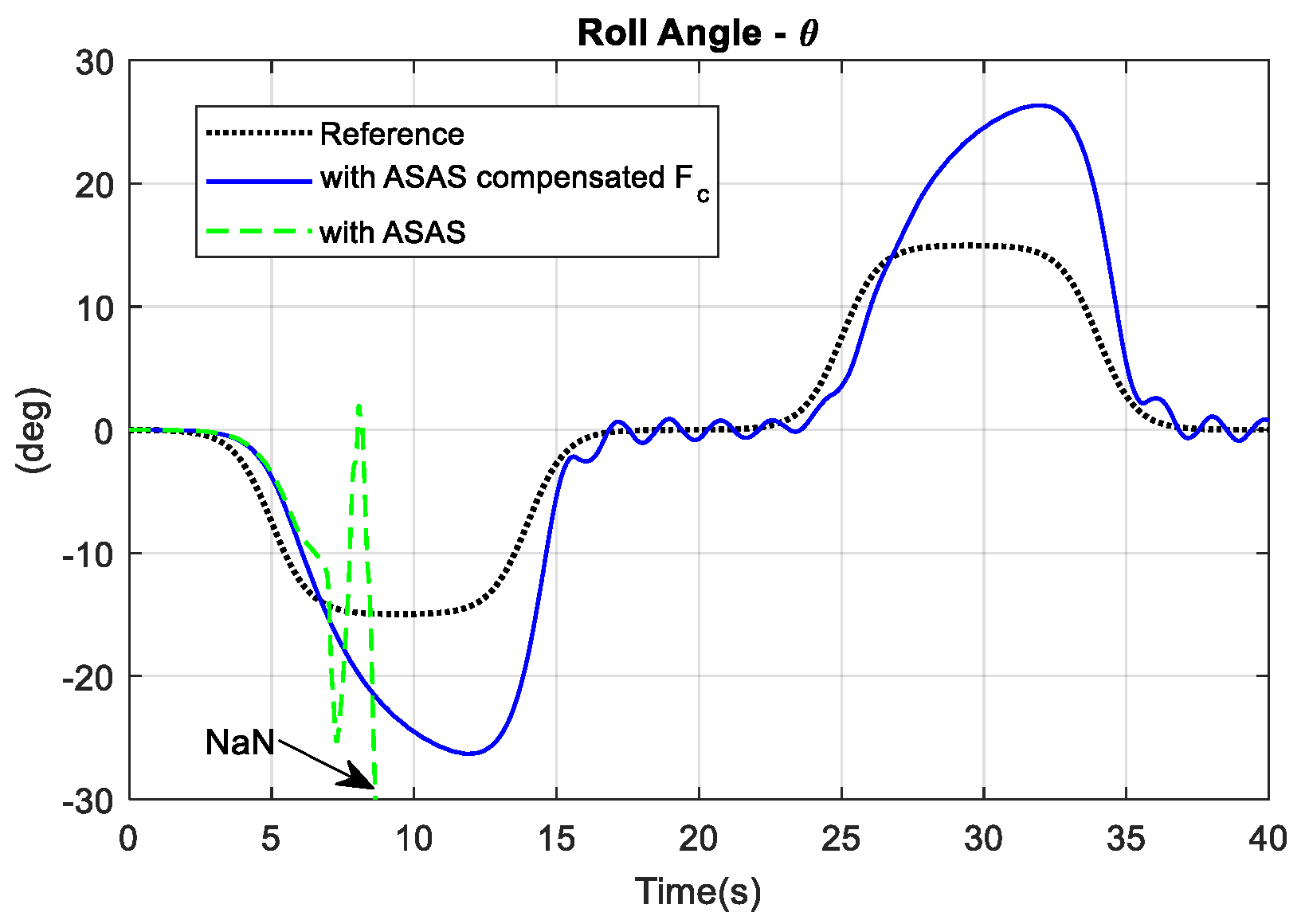
The efficiency of the ASAS in terms of its interaction with the rider’s control actions were determined using four simulations of the bicycle–rider system with an ASAS. For each simulation, a rider control model was developed using an MPC with time delays for the control output. The simulation results for the same rider model and various riding conditions for a bicycle with an ASAS and a traditional bicycle were compared. In six simulations using different riding conditions, the bicycle with the proposed ASAS had better performances and required fewer control actions than a traditional bicycle with the same rider.
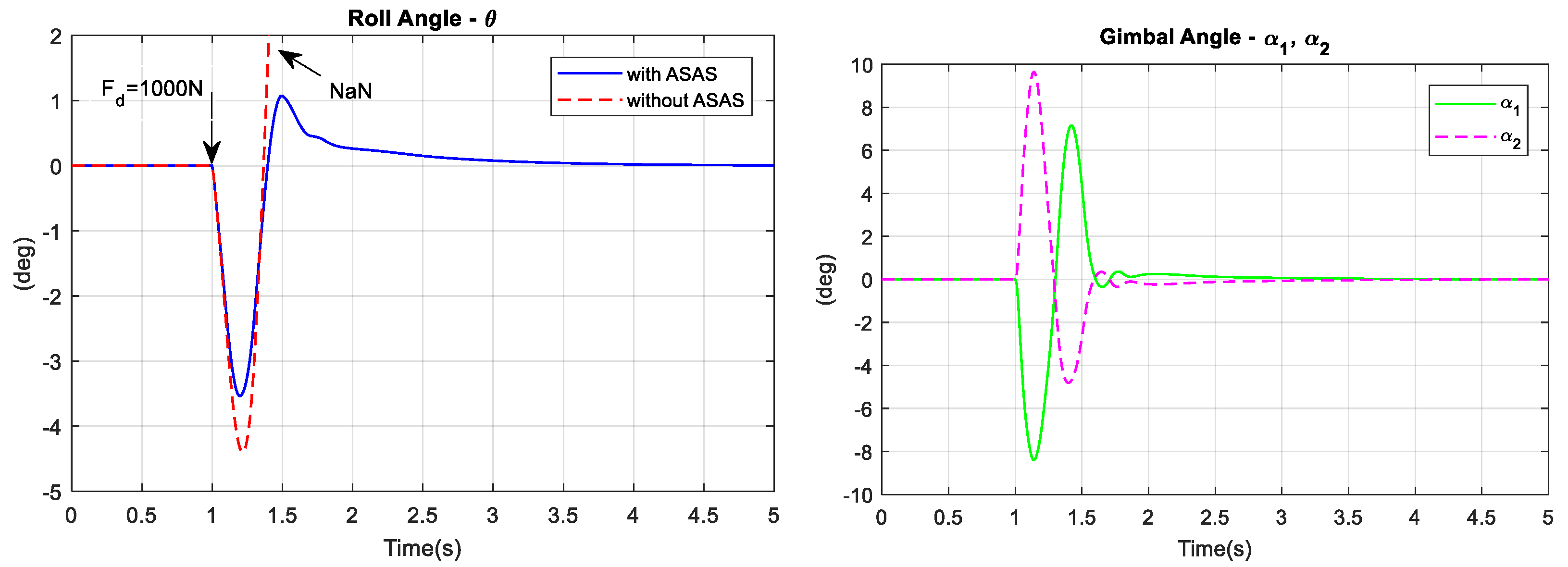
The results of this research show the potential of the ASAS in developing a new type of single-track vehicles. By actively controlling two counter-rotating flywheels with a model predictive controller, the ASAS could improve the stability of the vehicles while not affecting the single-track vehicles’ mobility regarding turning and vehicle sizes. In situations that may cause losing control and taking a fall of the riders, such as when impacted by an external collision force or at very low speeds, the ASAS can assist the rider to stabilize the vehicle as an active safety system.
To ride a bicycle with an ASAS, a new bicycle rider must be trained, which is similar to the case for a traditional bicycle. Since the dynamic behavior of a bicycle is changed when an ASAS is installed, even an experienced rider requires time to become familiar with it.
In order to make the bicycle with the ASAS easier for new riders to use and to decrease the time that is taken to become familiar with the system, an adaptive model predictive control algorithm will be used in the future. Using adaptive controllers, an ASAS can adapt and generate an assistant torque more efficiently for riders with different physical characteristics and skill levels and for different types of bicycle.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}