Adaptive Segmentation of Remote Sensing Images Based on Global Spatial Information


Abstract
1. Introduction
2. Related Work and Background
2.1. Traditional FCM Algorithm
2.2. FCM_S Algorithm
2.3. FLICM Algorithm
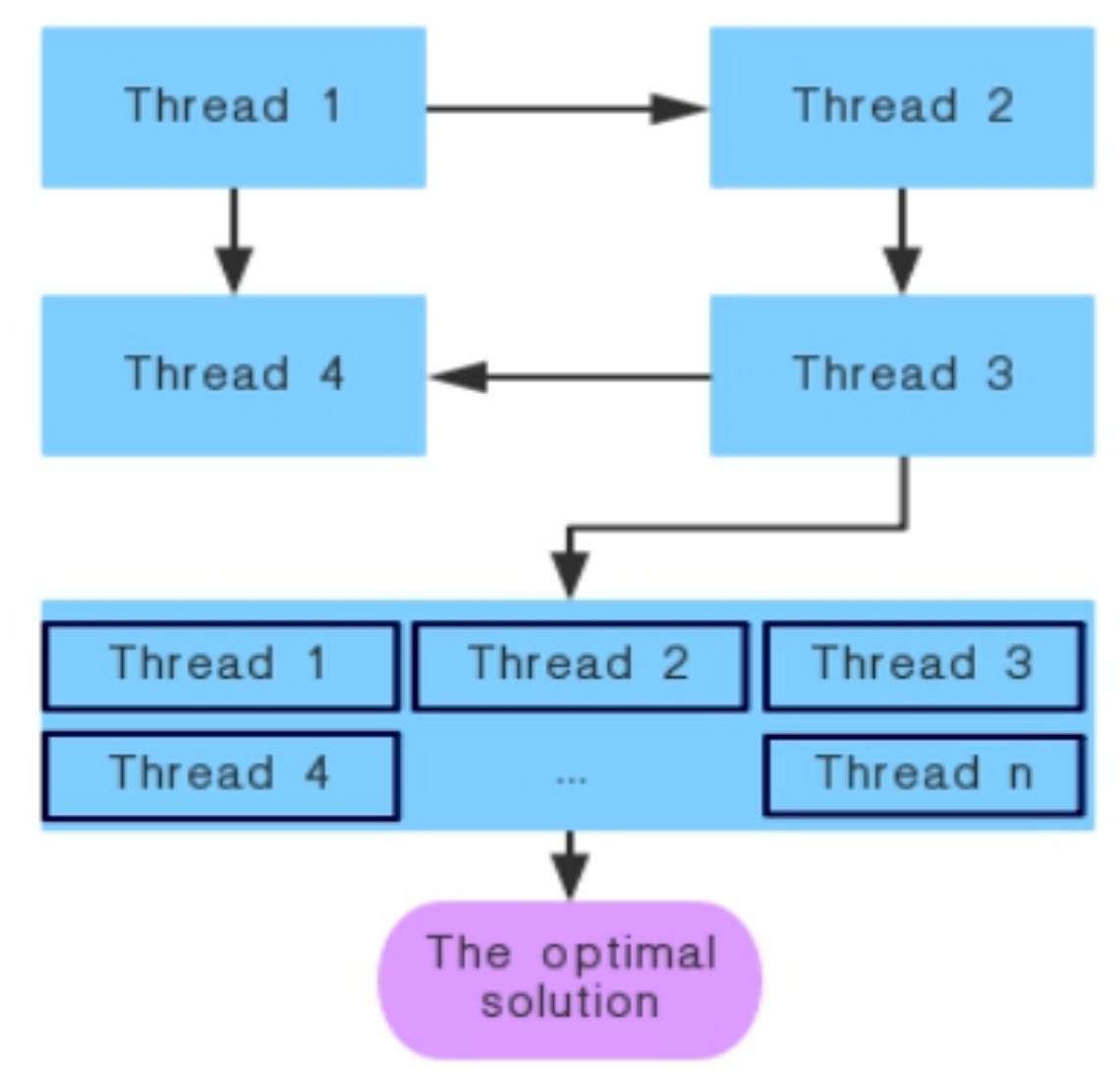
2.4. Parallel LGWO Algorithm
3. The Proposed Methods
3.1. Initial Cluster Center
- (1)
- Determine the initial swarm size NP and the number of iterations T_LGWO. The population is initialized into NP_s subpopulations, and the corresponding number of threads is opened up. Each thread is responsible for one subpopulation. Each subpopulation is iterated L times to transfer its best individuals to the adjacent subpopulation.
- (2)
- Randomly generate the initial subpopulations of wolves
- (3)
- Initialize temporal parameter a, random value p, random vectors A, C
- (4)
- Compute the fitness of each wolf
- (5)
- Set to be the best wolf
- (6)
- Set to be the second best wolf
- (7)
- while (t < T_LGWO) or (stopping condition) do
- (8)
- for each wolf
- (9)
- Update the position of current wolves
- (10)
- perform the greedy selection(GS)
- (11)
- end for
- (12)
- Update parameters a, p, A, C
- (13)
- Compute the fitness of each wolf
- (14)
- Update,
- (15)
- The number of iterations t = t + 1
- (16)
- if modulo operation mod (t,L) = 0, transfer the best individuals of each subpopulation to adjacent subpopulations.
- (17)
- end while
- (18)
- Walk through the optimal solution in each subpopulation, find a global optimal solution, as the final solution.
- (19)
- Return
3.2. Fast Non-Local Mean Denoising
3.3. Improved Value Function
- Step 1:
- Determine the number of clusters , fuzzy weighted index , the number of iterations T_max, the iterative termination threshold , the size of the search window , the size of the neighborhood window , and the number of current iterations t = 1;
- Step 2:
- The initial clustering center is obtained by the LGWO algorithm, calculate the filtered image .
- Step 3:
- Initialization of the membership degree matrix .
- Step 4:
- Compute weight parameter .
- Step 5:
- Compute the new objective function value .
- Step 6:
- Update membership degree matrix by Equation (19).
- Step 7:
- Update cluster centers by Equation (20).
- Step 8:
- If or the current iteration number , then terminate the iteration, output the membership matrix and the cluster center ; otherwise, return Step 4 and continue the next iteration.
4. Experimental Results and Performance Analysis
4.1. Evaluation Index of Fuzzy Clustering Algorithm
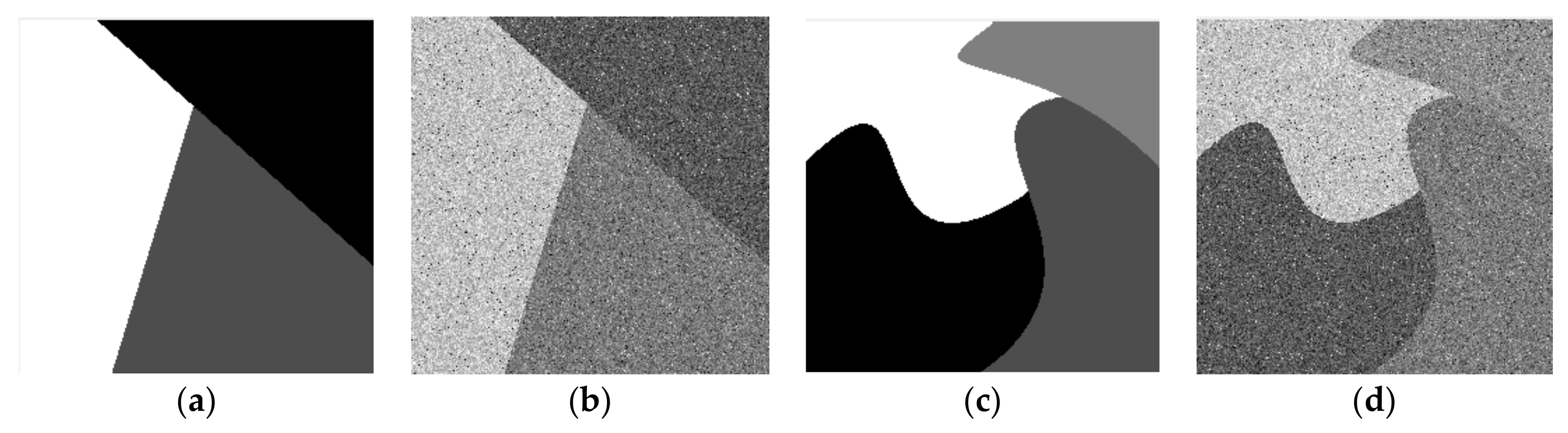
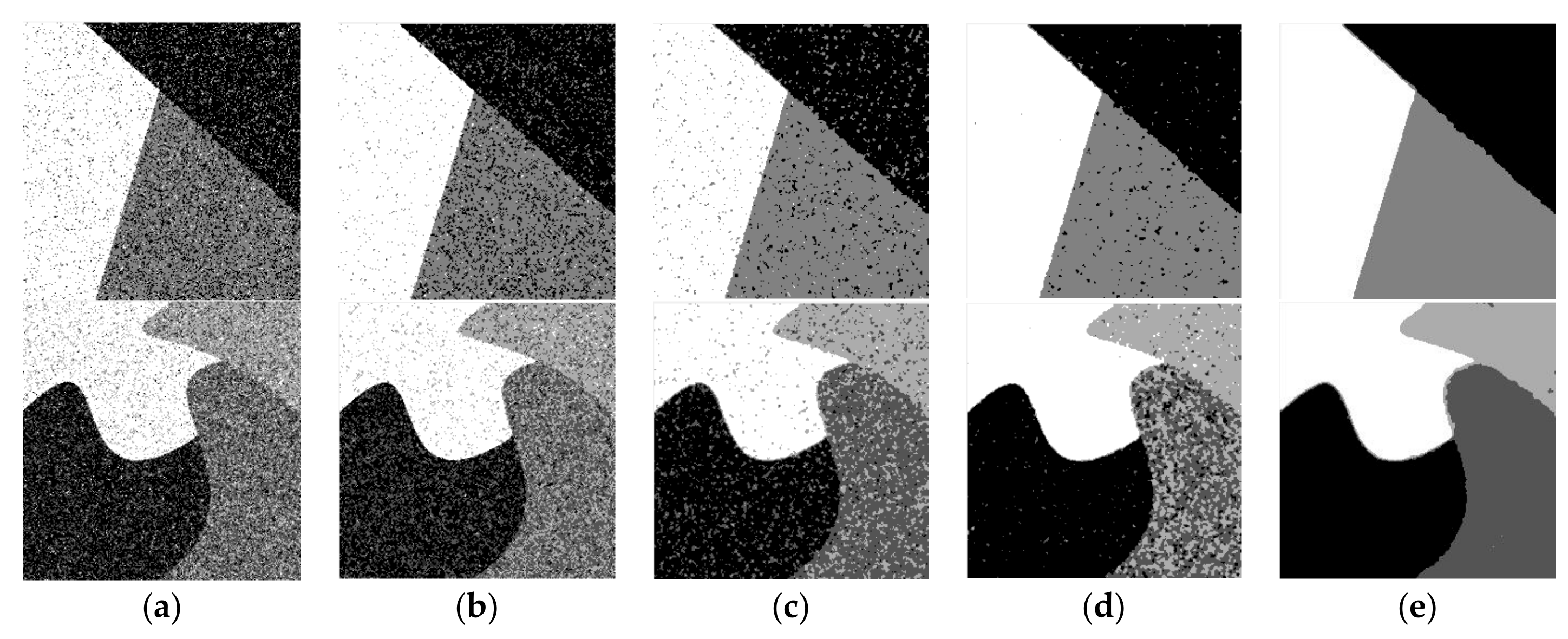
4.2. Algorithm Performance Test
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ghosh, A.; Mishra, N.S.; Ghosh, S. Fuzzy clustering algorithms for unsupervised change detection in remote sensing images. Inf. Sci. 2011, 181, 699–715. [Google Scholar] [CrossRef]
- Niazmardi, S.; Homayouni, S.; Safari, A. An Improved FCM Algorithm Based on the SVDD for Unsupervised;Hyperspectral Data Classification. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2013, 6, 831–839. [Google Scholar] [CrossRef]
- Huo, H.; Guo, J.; Li, Z.L. Hyperspectral Image Classification for Land Cover Based on an Improved Interval Type-II Fuzzy C-Means Approach. Sensors 2018, 18, 363. [Google Scholar] [CrossRef]
- Chen, S.; Sun, T.; Yang, F.; Sun, H.; Guan, Y. An improved optimum-path forest clustering algorithm for remote sensing image segmentation. Comput. Geosci. 2018, 112, 38–46. [Google Scholar] [CrossRef]
- Balafar, M.A.; Ramli, A.R.; Mashohor, S.; Farzan, A. Compare different spatial based fuzzy-C_mean (FCM) extensions for MRI image segmentation. In Proceedings of the 2nd International Conference on Computer and Automation Engineering, Singapore, 26–28 February 2010; pp. 609–611. [Google Scholar]
- Jahanavi, M.S.; Kurup, S. A novel approach to detect brain tumour in MRI images using hybrid technique with SVM classifiers. In Proceedings of the IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), Bangalore, India, 20–21 May 2017. [Google Scholar]
- Wenjing, T.; Zhaoxin, X.; Xiaofeng, Z. Medical image segmentation based on FCM with peak detection. CAAI Trans. Intell. Syst. 2014, 9, 584–589. [Google Scholar]
- Modava, M.; Akbarizadeh, G. Coastline extraction from SAR images using spatial fuzzy clustering and the active contour method. Int. J. Remote Sens. 2017, 38, 355–370. [Google Scholar] [CrossRef]
- Wang, W.; Nie, T.; Fu, T.; Ren, J.; Jin, L. A Novel Method of Aircraft Detection Based on High-Resolution Panchromatic Optical Remote Sensing Images. Sensors 2017, 17, 1047. [Google Scholar] [CrossRef]
- Guoying, L.; Yun, Z.; Aimin, W. Incorporating adaptive local information into fuzzy clustering for image segmentation. IEEE Trans. Image Process. 2015, 24, 3990–4000. [Google Scholar] [CrossRef]
- Fergus, R.; Perona, P.; Zisserman, A. Object class recognition by unsupervised scale-invariant learning. In Proceedings of the 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Madison, WI, USA, 18–20 June 2003; Volume 2, pp. II-264–II-271. [Google Scholar]
- Ahmed, M.N.; Yamany, S.M.; Mohamed, N.; Farag, A.A.; Moriarty, T. A modified fuzzy C-means algorithm for bias field estimation and segmentation of MRI data. IEEE Trans. Med. Imaging 2002, 21, 193–199. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, D. Robust image segmentation using FCM with spatial constraints based on new kernel-induced distance measure. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2004, 34, 1907. [Google Scholar] [CrossRef]
- Cai, W.; Chen, S.; Zhang, D. Fast and robust fuzzy c-means clustering algorithms incorporating local information for image segmentation. Pattern Recognit. 2007, 40, 825–838. [Google Scholar] [CrossRef]
- Krinidis, S.; Chatzis, V. A robust fuzzy local information C-Means clustering algorithm. IEEE Trans. Image Process. 2010, 19, 1328–1337. [Google Scholar] [CrossRef]
- Zhao, F.; Jiao, L.; Liu, H. Fuzzy c-means clustering with non local spatial information for noisy image segmentation. Front. Comput. Sci. China 2011, 5, 45–56. [Google Scholar] [CrossRef]
- Gong, M.; Liang, Y.; Shi, J.; Ma, W.; Ma, J. Fuzzy C-means clustering with local information and kernel metric for image segmentation. IEEE Trans. Image Process. 2013, 22, 573–584. [Google Scholar] [CrossRef]
- Xu, L.; Jia, H.; Lang, C.; Peng, X.; Sun, K. A Novel Method for Multilevel Color Image Segmentation Based on Dragonfly Algorithm and Differential Evolution. IEEE Access 2019, 7, 19502–19538. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Li, M.Q.; Xu, L.P.; Xu, N.; Huang, T.; Yan, B. SAR Image Segmentation Based on Improved Grey Wolf Optimization Algorithm and Fuzzy C-Means. Math. Probl. Eng. 2018, 2018, 1–11. [Google Scholar] [CrossRef]
- Heidari, A.A.; Pahlavani, P. An efficient modified grey wolf optimizer with Lévy flight for optimization tasks. Appl. Soft Comput. 2017, 60, 115–134. [Google Scholar] [CrossRef]
- Buades, A.; Coll, B.; Morel, J.M. A non-local algorithm for image denoising. In Proceedings of the IEEE Computer Society Conference on Computer Vision & Pattern Recognition, San Diego, CA, USA, 20–25 June 2005. [Google Scholar]
- Zhao, F. Fuzzy clustering algorithms with self-tuning non-local spatial information for image segmentation. Neurocomputing 2013, 106, 115–125. [Google Scholar] [CrossRef]
- Froment, J. Parameter-Free Fast Pixel wise Non-Local Means Denoising. Image Process. OnLine 2014, 4, 300–326. [Google Scholar] [CrossRef]
- Zhao, X.; Yu, L.; Zhao, Q. A Fuzzy Clustering Image Segmentation Algorithm with Double Neighborhood System Combined with Markov Gaussian Model. J. Comput. Aided Des. Comput. Graph. 2016, 28, 615–623. [Google Scholar]
- Zhang, D.Q.; Chen, S.C.; Pan, Z.S.; Tan, K.R. Kernel-based fuzzy clustering incorporating spatial constraints for image segmentation. In Proceedings of the IEEE International Conference on Machine Learning and Cybernetics, Xi’an, China, 5 November 2003; Volume 4, pp. 2189–2192. [Google Scholar]
- Wu, K.L.; Yang, M.S. Alternative c-means clustering algorithms. Pattern Recognit. 2002, 35, 2267–2278. [Google Scholar] [CrossRef]
- Eskicioglu, A.M.; Fisher, P.S. Image quality measures and their performance. IEEE Trans. Commun. 1995, 43, 2959–2965. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]
- Bezdek, J.C. Cluster Validity with Fuzzy Sets. J. Cybern. 1973, 3, 58–73. [Google Scholar] [CrossRef]
- Bezdek, J.C. Mathematical Models for Systematics and Taxonomy. In Proceedings of the 8th International Conference on Numerical Taxonomy, San Francisco, CA, USA, January 1975; pp. 659–661. [Google Scholar]
- Tanchenko, A. Visual-PSNR measure of image quality. J. Vis. Commun. Image Represent. 2014, 25, 874–878. [Google Scholar] [CrossRef]
- Naidu MS, R.; Rajesh Kumar, P.; Chiranjeevi, K. Shannon and Fuzzy entropy based evolutionary image thresholding for image segmentation. Alexandria Eng. J. 2017, 57, 1643–1655. [Google Scholar] [CrossRef]
- Yang, Y.; Newsam, S. Bag-Of-Visual-Words and Spatial Extensions for Land-Use Classification. In Proceedings of the ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems (ACM GIS), San Jose, CA, USA, 2–5 November 2010. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
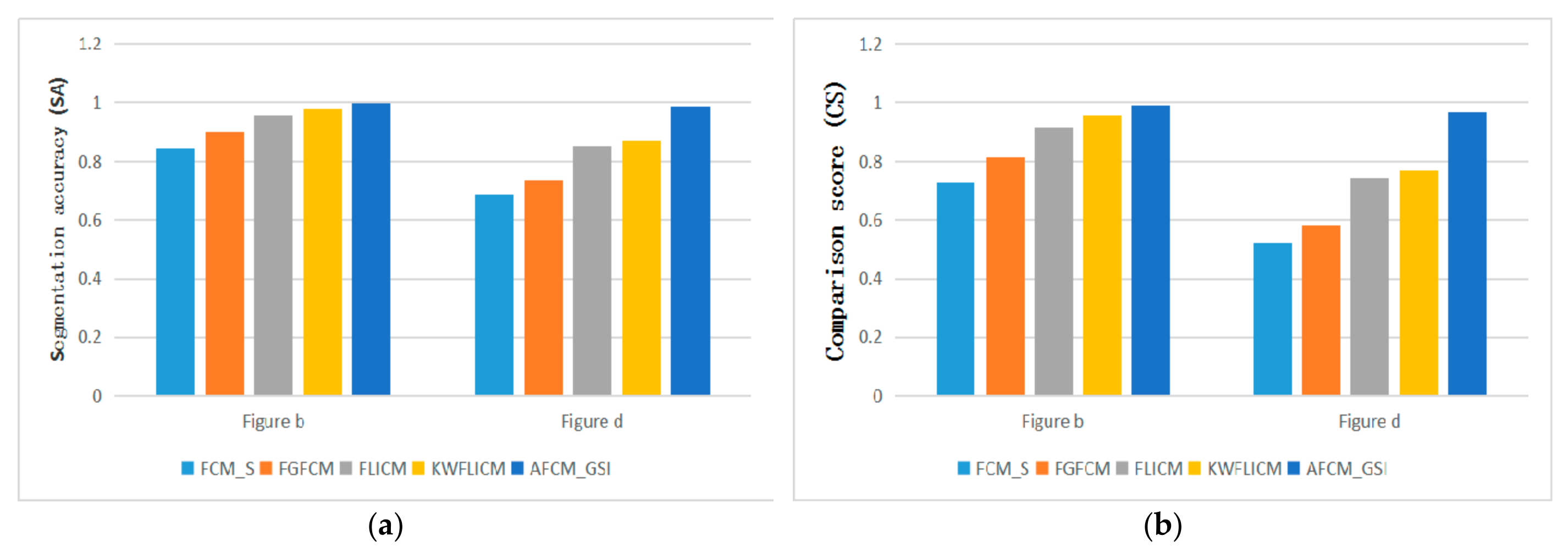
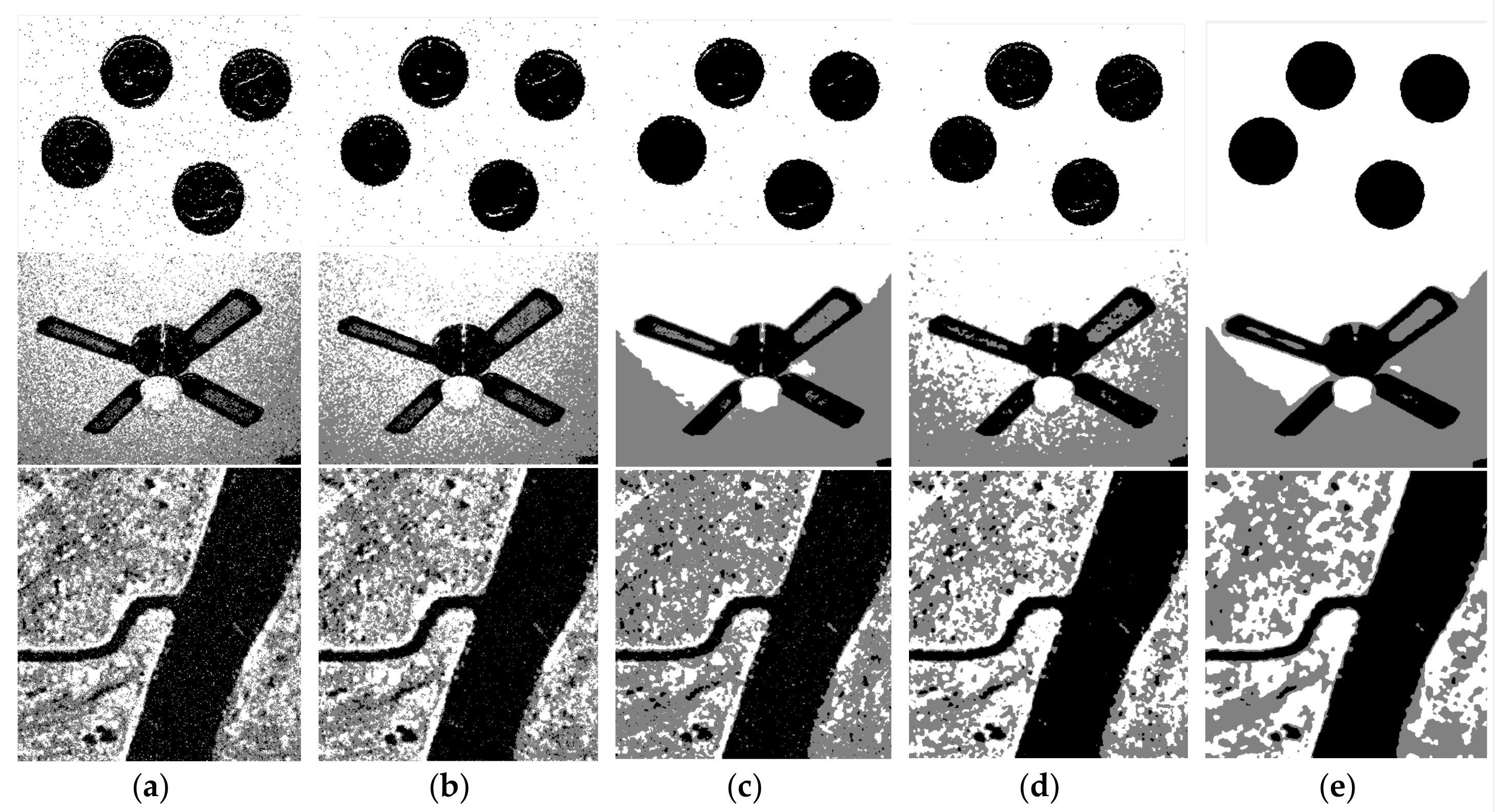
| Image | Algorithms | FCM_S | FGFCM | FLICM | KWFLICM | AFCM_GSI |
|---|---|---|---|---|---|---|
| b | SA | 0.8423 | 0.8976 | 0.9565 | 0.9780 | 0.9953 |
| b | CS | 0.7275 | 0.8142 | 0.9161 | 0.9569 | 0.9907 |
| d | SA | 0.6860 | 0.7343 | 0.8508 | 0.8701 | 0.9843 |
| d | CS | 0.5221 | 0.5802 | 0.7409 | 0.7703 | 0.9671 |
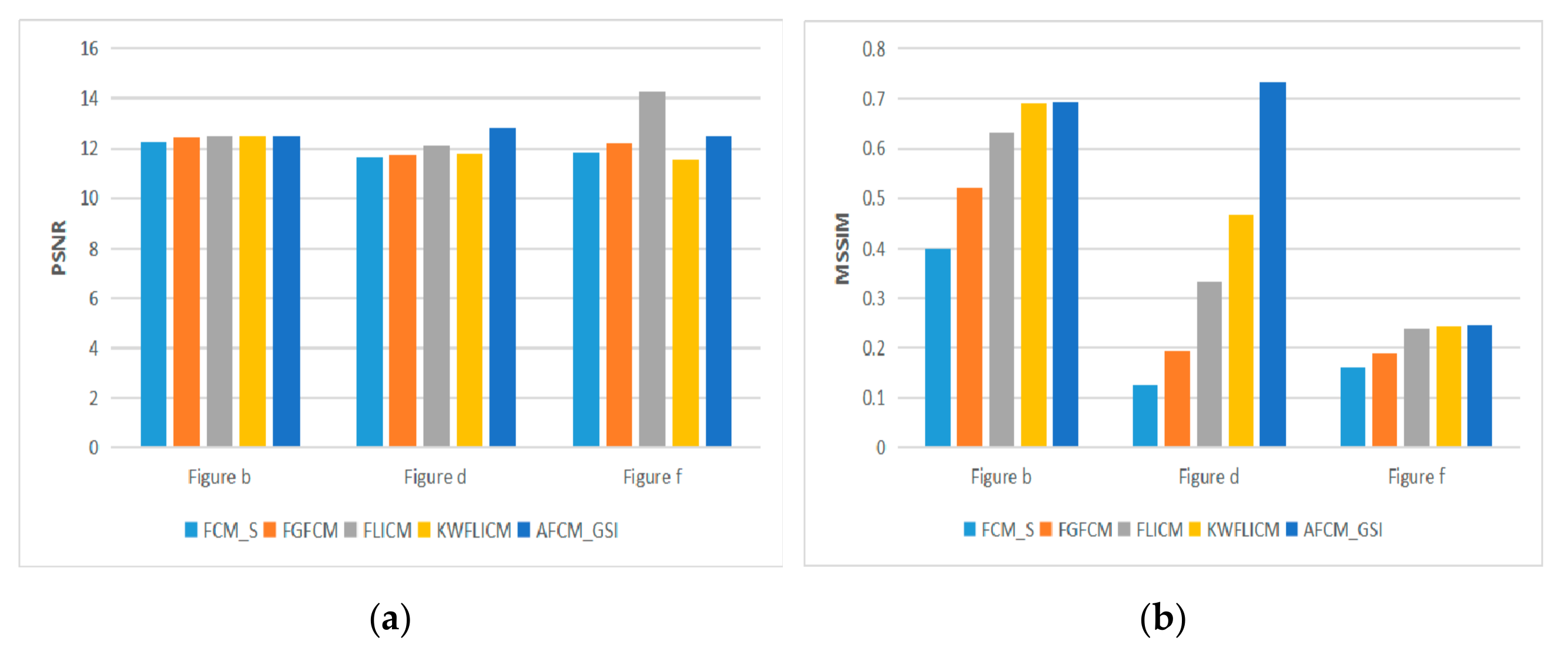
| Image | Algorithms | FCM_S | FGFCM | FLICM | KWFLICM | AFCM_GSI |
|---|---|---|---|---|---|---|
| b | PSNR | 12.2791 | 12.4592 | 12.5016 | 12.5148 | 12.5284 |
| b | MSSIM | 0.3987 | 0.5205 | 0.6324 | 0.6921 | 0.6934 |
| d | PSNR | 11.6559 | 11.7341 | 12.1253 | 11.7898 | 12.7938 |
| d | MSSIM | 0.1243 | 0.1931 | 0.3340 | 0.4668 | 0.7322 |
| f | PSNR | 11.8354 | 12.2012 | 14.2452 | 11.5220 | 12.5273 |
| f | MSSIM | 0.1608 | 0.1877 | 0.2398 | 0.2450 | 0.2471 |
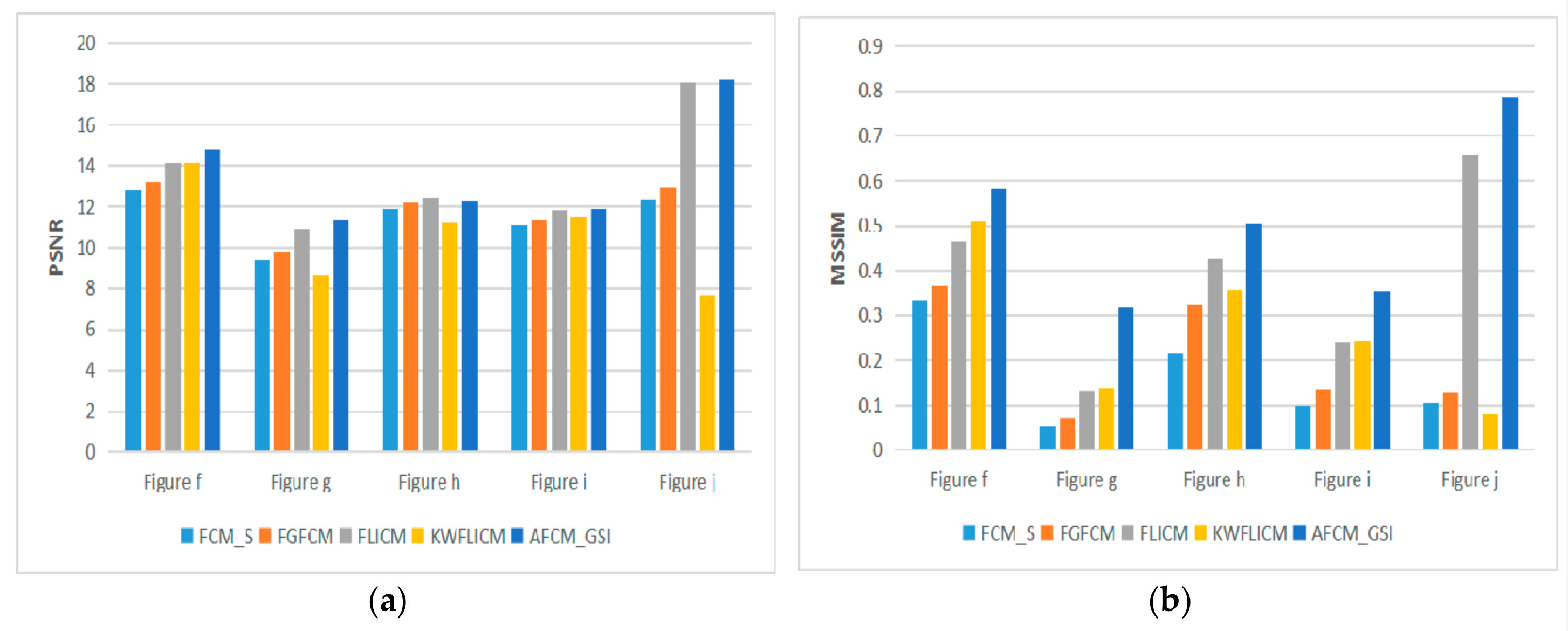
| Image | Algorithms | FCM_S | FGFCM | FLICM | KWFLICM | AFCM_GSI |
|---|---|---|---|---|---|---|
| f | PSNR | 12.7873 | 13.2223 | 14.1081 | 14.1206 | 14.8136 |
| f | MSSIM | 0.3332 | 0.3666 | 0.4667 | 0.5086 | 0.5829 |
| g | PSNR | 9.3817 | 9.8205 | 10.8840 | 8.6311 | 11.3334 |
| g | MSSIM | 0.0529 | 0.0721 | 0.1321 | 0.1381 | 0.3190 |
| h | PSNR | 11.8431 | 12.2115 | 12.4235 | 11.2166 | 12.2928 |
| h | MSSIM | 0.2176 | 0.3247 | 0.4278 | 0.3557 | 0.5046 |
| i | PSNR | 11.0907 | 11.3853 | 11.7925 | 11.4815 | 11.8863 |
| i | MSSIM | 0.1009 | 0.1341 | 0.2391 | 0.2414 | 0.3552 |
| j | PSNR | 12.3548 | 12.8767 | 18.0852 | 7.7038 | 18.2051 |
| j | MSSIM | 0.1046 | 0.1306 | 0.6565 | 0.0806 | 0.7849 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Xu, L.; Gao, S.; Xu, N.; Yan, B. Adaptive Segmentation of Remote Sensing Images Based on Global Spatial Information. Sensors 2019, 19, 2385. https://doi.org/10.3390/s19102385
Li M, Xu L, Gao S, Xu N, Yan B. Adaptive Segmentation of Remote Sensing Images Based on Global Spatial Information. Sensors. 2019; 19(10):2385. https://doi.org/10.3390/s19102385
Chicago/Turabian StyleLi, Muqing, Luping Xu, Shan Gao, Na Xu, and Bo Yan. 2019. "Adaptive Segmentation of Remote Sensing Images Based on Global Spatial Information" Sensors 19, no. 10: 2385. https://doi.org/10.3390/s19102385
APA StyleLi, M., Xu, L., Gao, S., Xu, N., & Yan, B. (2019). Adaptive Segmentation of Remote Sensing Images Based on Global Spatial Information. Sensors, 19(10), 2385. https://doi.org/10.3390/s19102385