Mexican-Hat-Like Response in a Flexible Tactile Sensor Using a Magnetorheological Elastomer


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Works
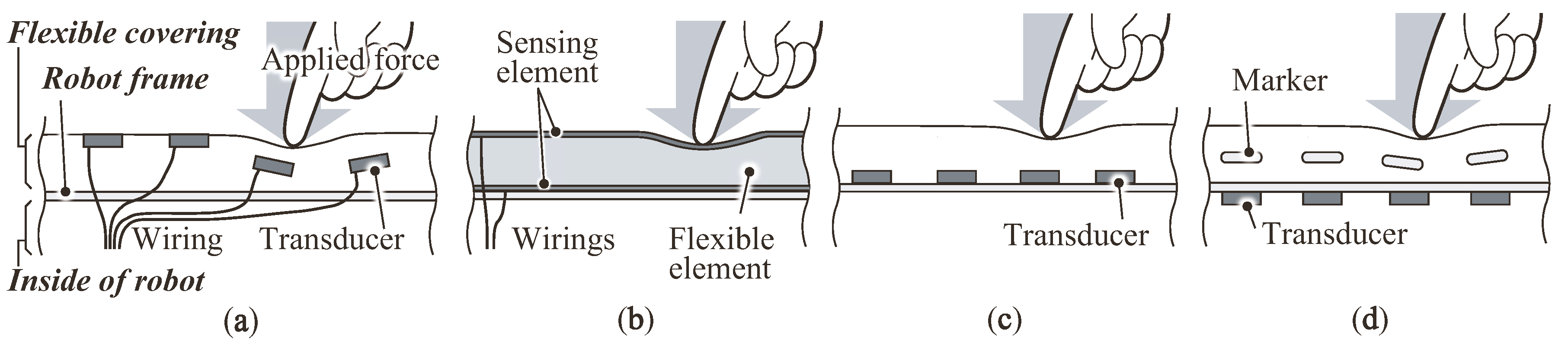
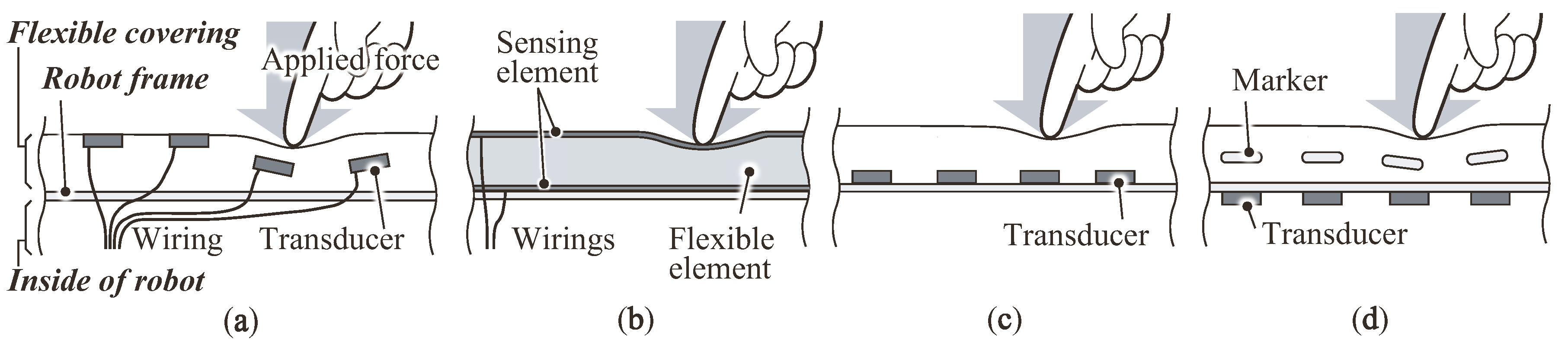
- Type A, Transducers are placed into a flexible covering: This type of sensor (Figure 2a; e.g., [9,10,11,12]) places the transducers with the associated electrical wiring inside or on the surface of the flexible covering. In this structure, the transducers directly capture the deformation or vibration of the covering. One of the issues of this type of structure is that the transducers inside or on the surface of the covering deteriorate the durability of the sensor because a large stress and shock can be added onto the delicate transducers. In addition, Goka et al. [13] have pointed out that the wiring in the flexible covering might be damaged with a large amount of deformation of the covering; therefore, they developed a magnetic tactile sensor (we classify this sensor here as Type D, as described below). Recent progress in stretchable electronics techniques [14,15,16] for wiring may solve this issue.
- Type B, The flexible covering functions as a transducer: In this approach, sensors employ a flexible covering that functions as a transducer, e.g., using capacitive or resistive technology [2,17,18,19]. The transducer consists of a flexible functional element inserted between a pair of sensing elements such as a stretchable electrode. These sensors can measure the applied load with a high sensitivity since the transducers capture the surface deformation directly. A large number of wires, which connect the flexible covering and the inside of the robot, might diminish the maintainability.
- Type C, Transducers are mounted onto the surface of the robot frame: These sensors (Figure 2c; e.g., [1,20,21,22,23]) mount their transducers onto the outer surface of the robot frame. Because their flexible covering has no wiring or transducers, there are no problems with wiring disconnection, and replacement of the covering is easy. Shimojo [24] has pointed out that a flexible covering functions as a spatial low-pass filter for a tactile transducer when the sensor elements are under the covering. Therefore, the sensitivity will be diminished by a thick and soft covering such as a compressible sponge sheet.
- Type D, Transducers are placed inside the robot with their markers inside the covering: For this type of sensor (Figure 2d), the transducers can be removed from the part where a contact force is applied; instead, the transducers are placed inside the robot. The applied loads are estimated by monitoring the displacement of the markers embedded inside the covering.
3. Proposed Tactile Sensor
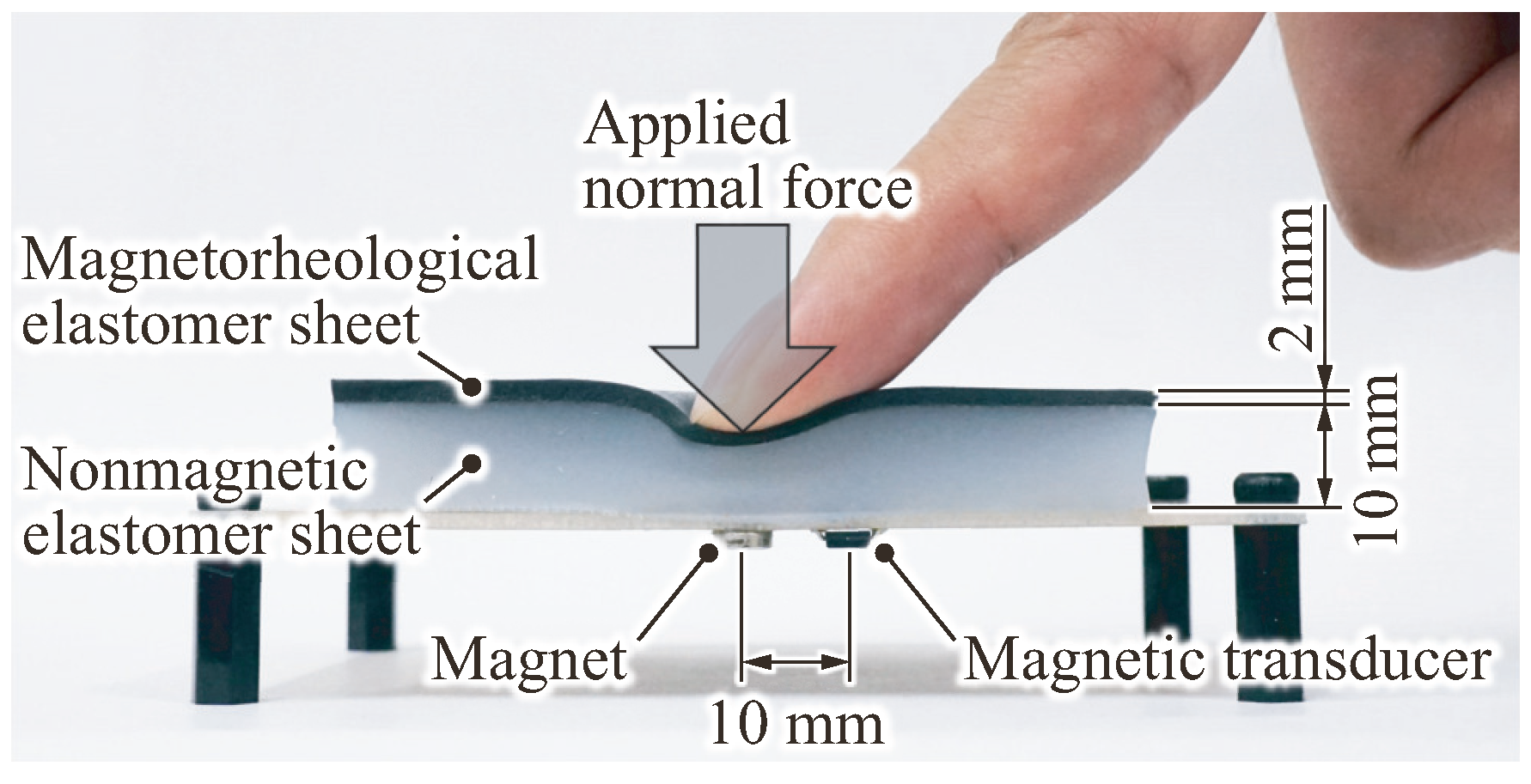
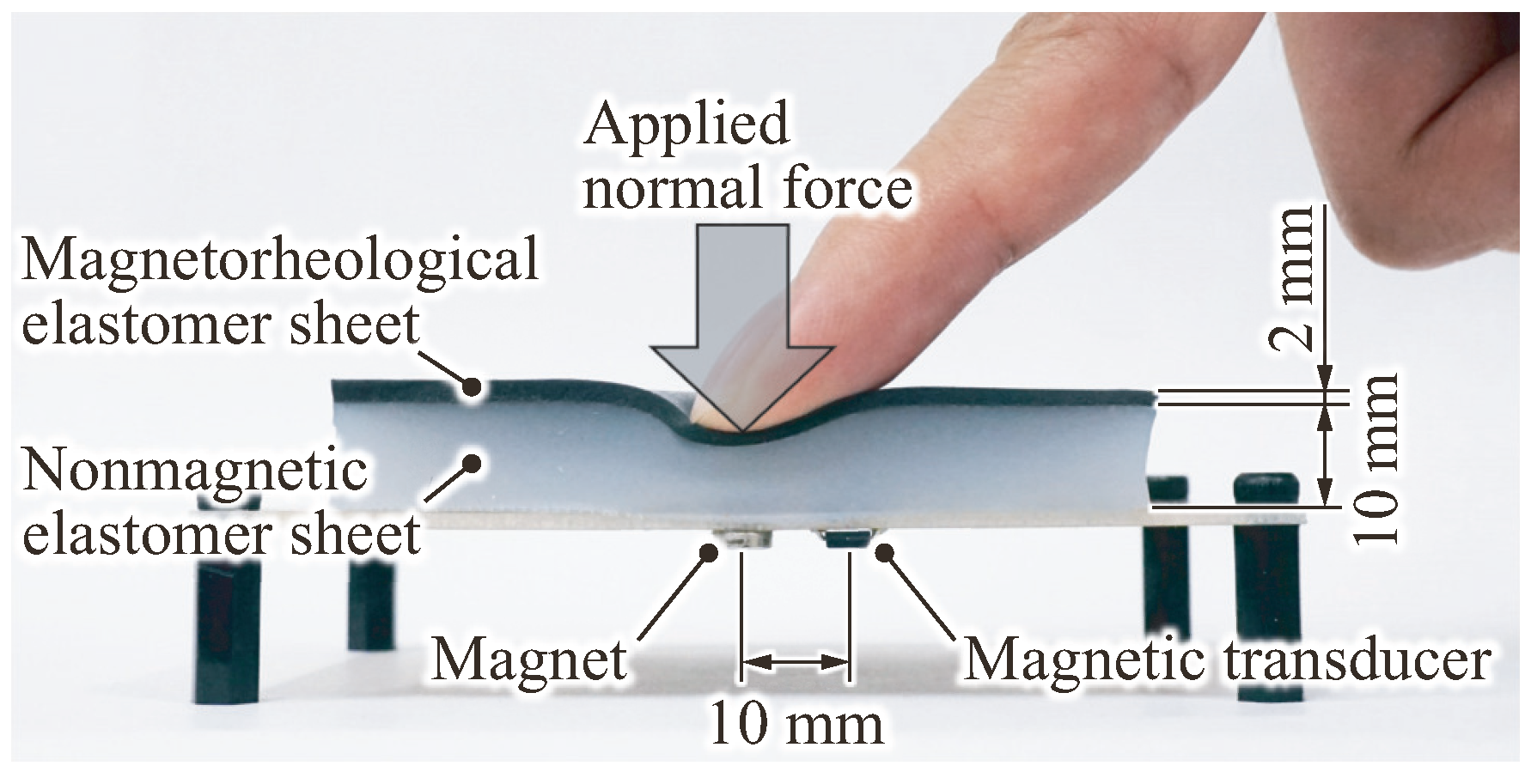
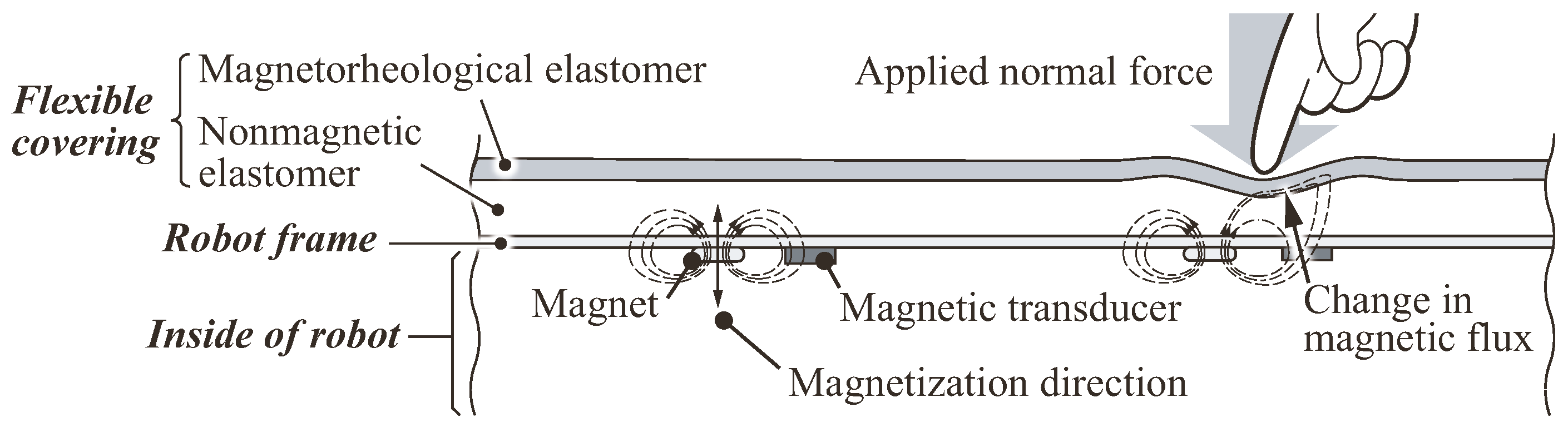
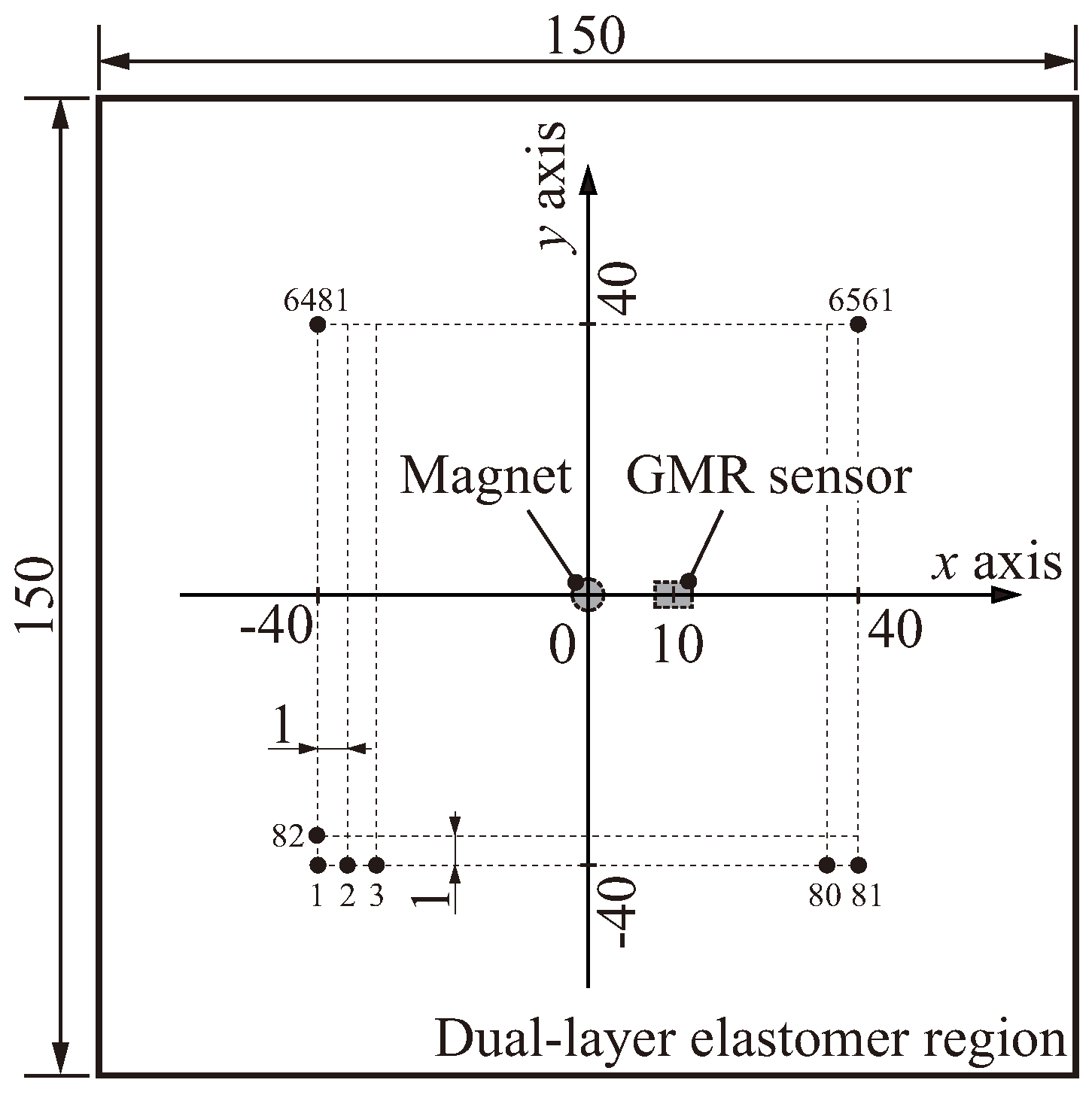
3.1. Structure and Sensing Mechanism
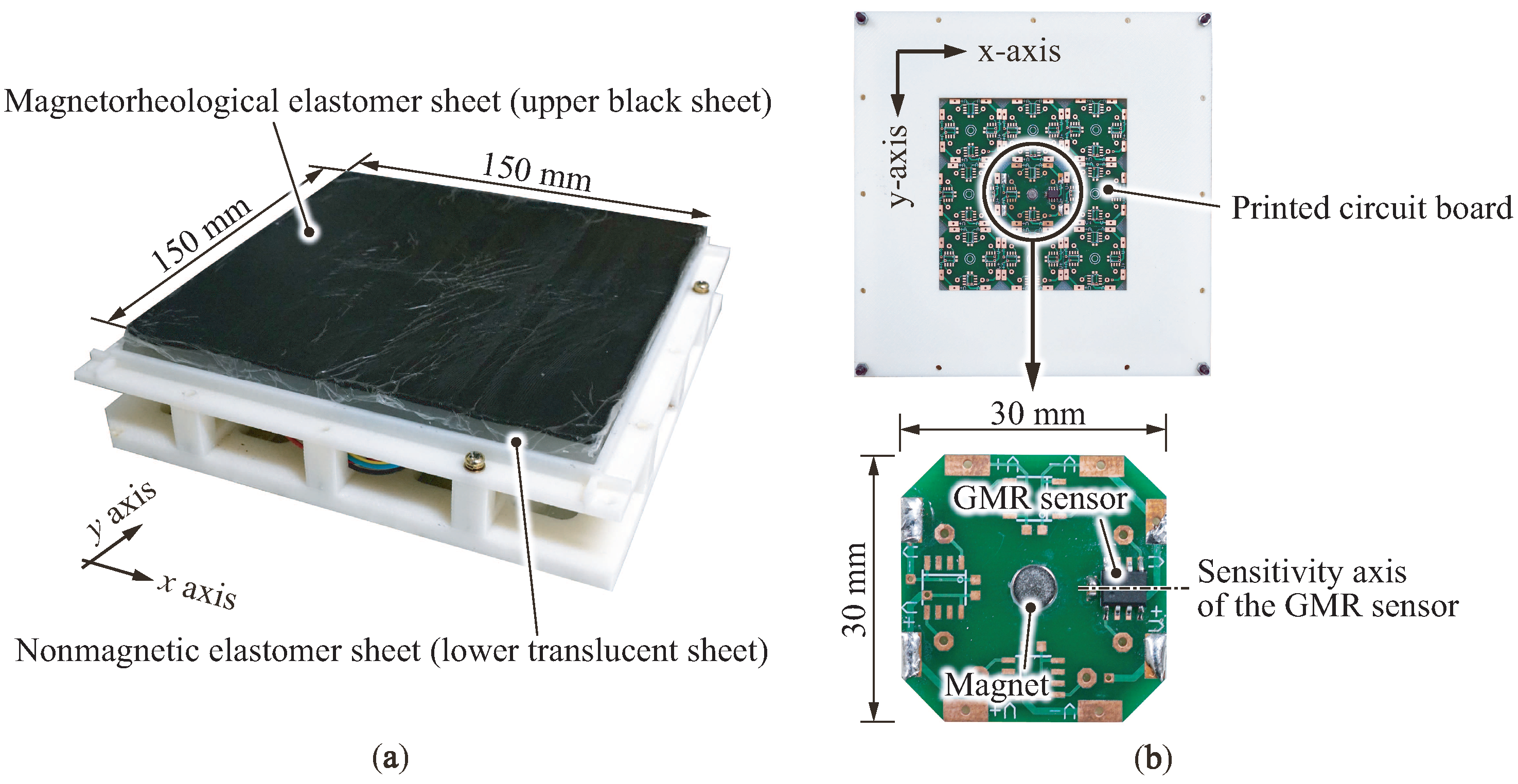
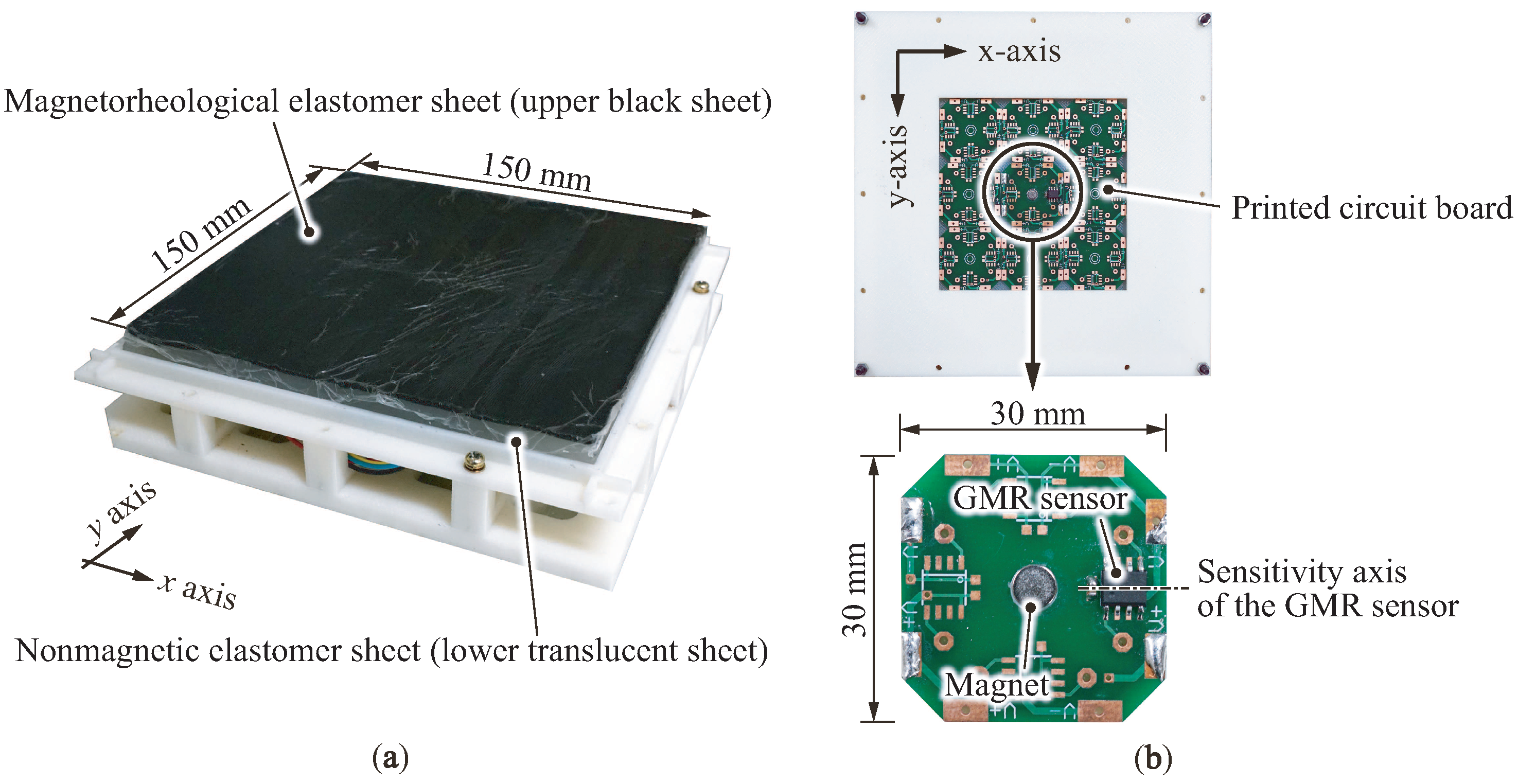
3.2. Fabricated Sensor
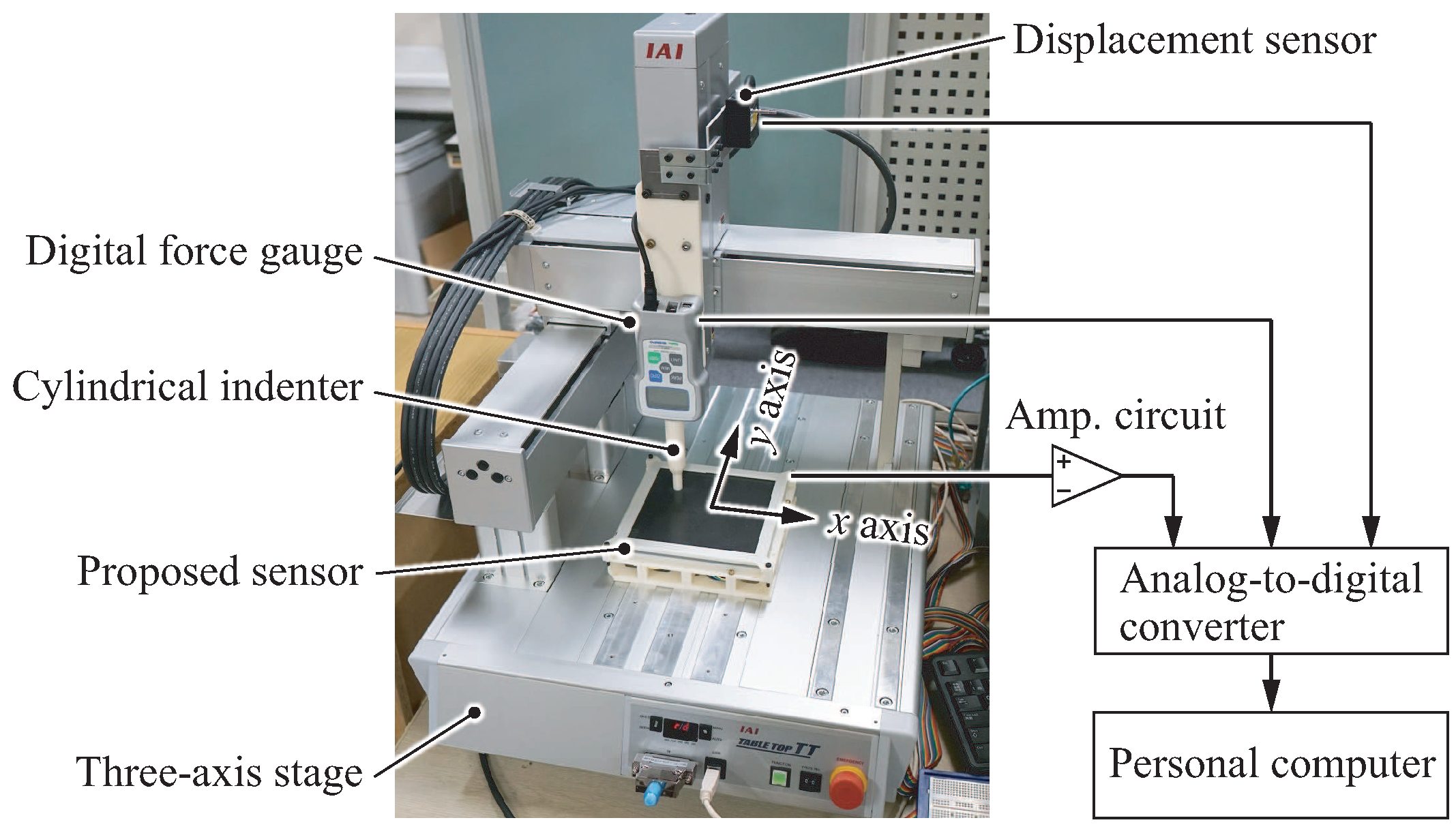
4. Experiments
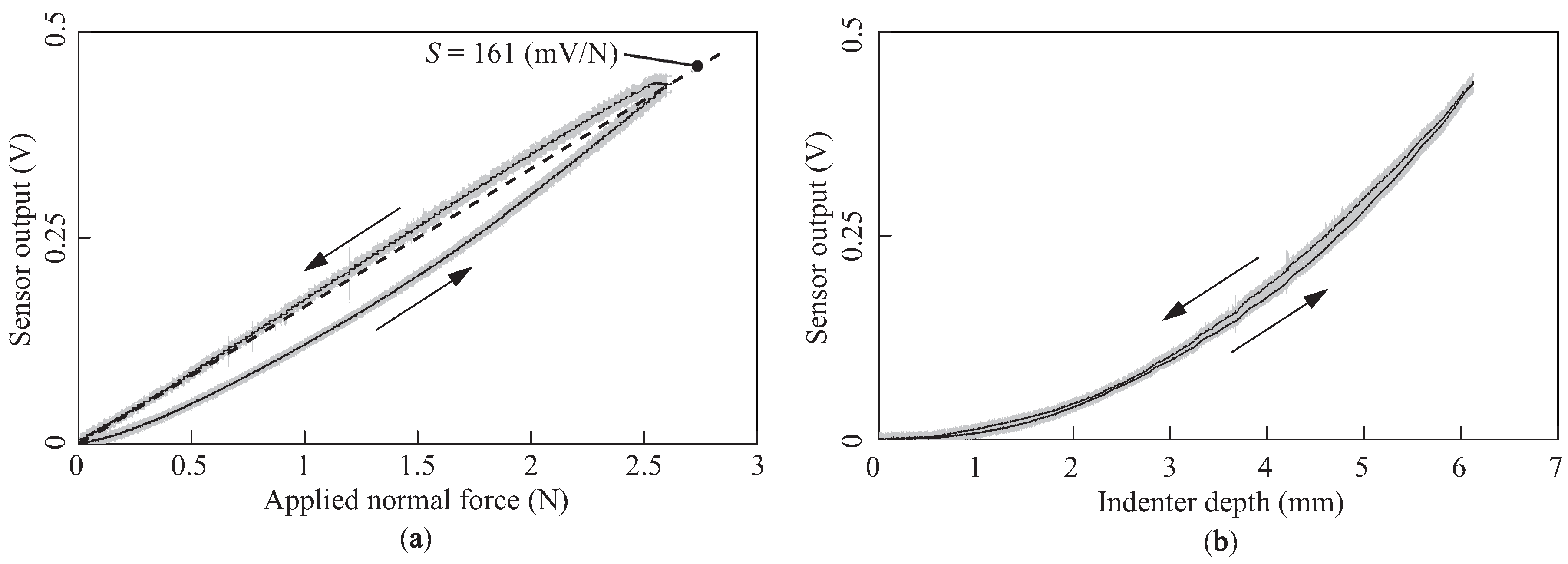
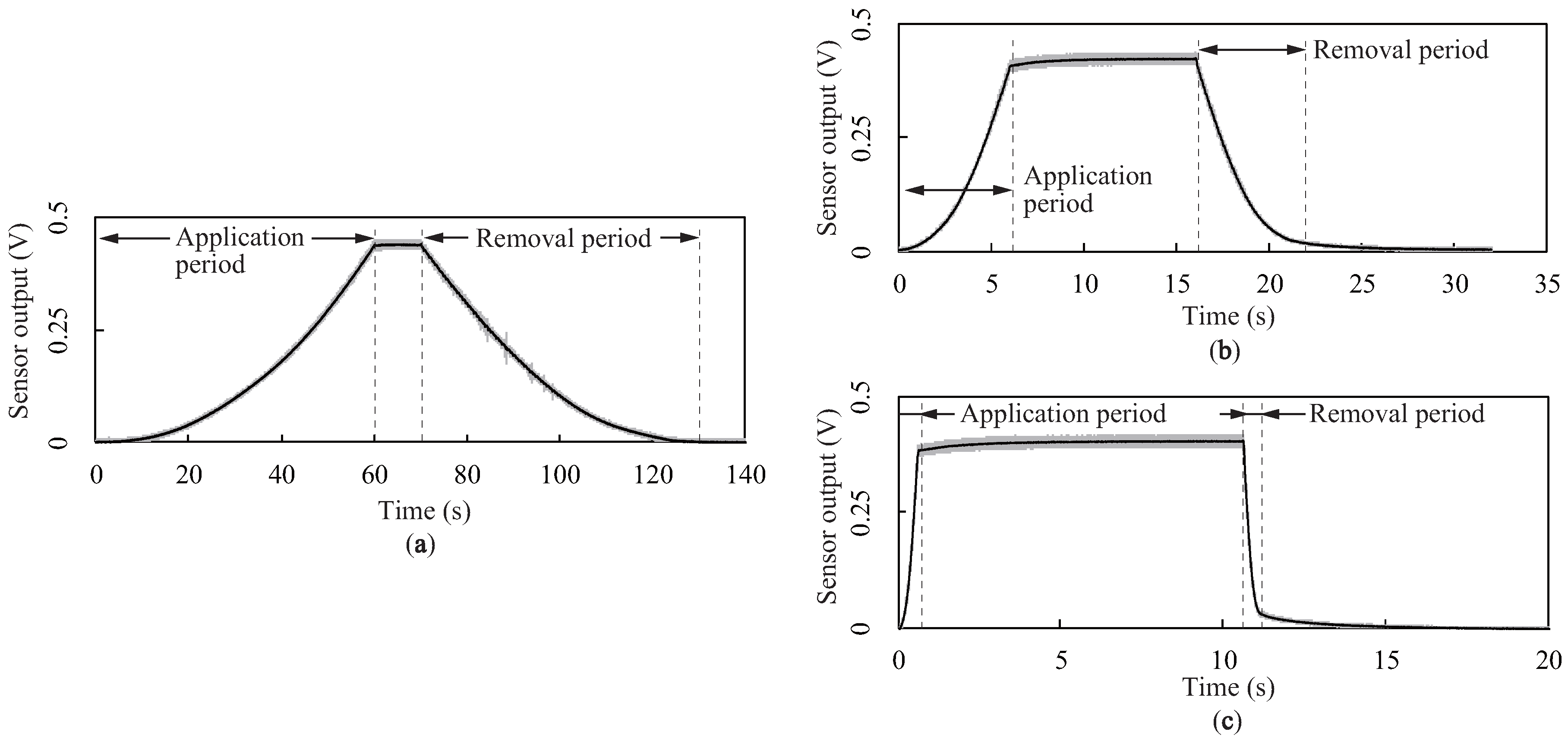
4.1. Sensor Response and Contact Speed
4.2. Spatial Response
5. Discussion
5.1. Sensor Response and Contact Speed
5.2. Spatial Response
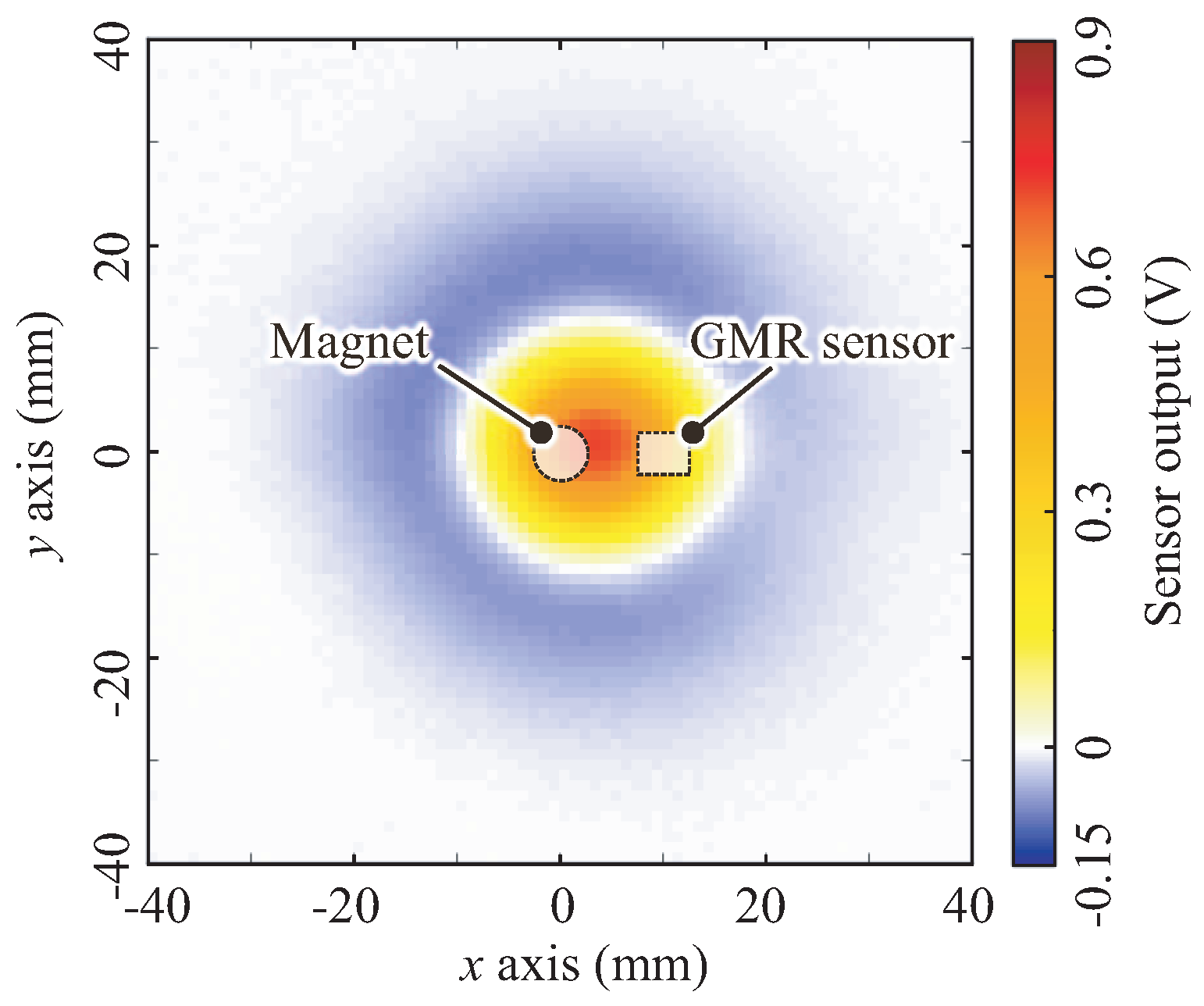
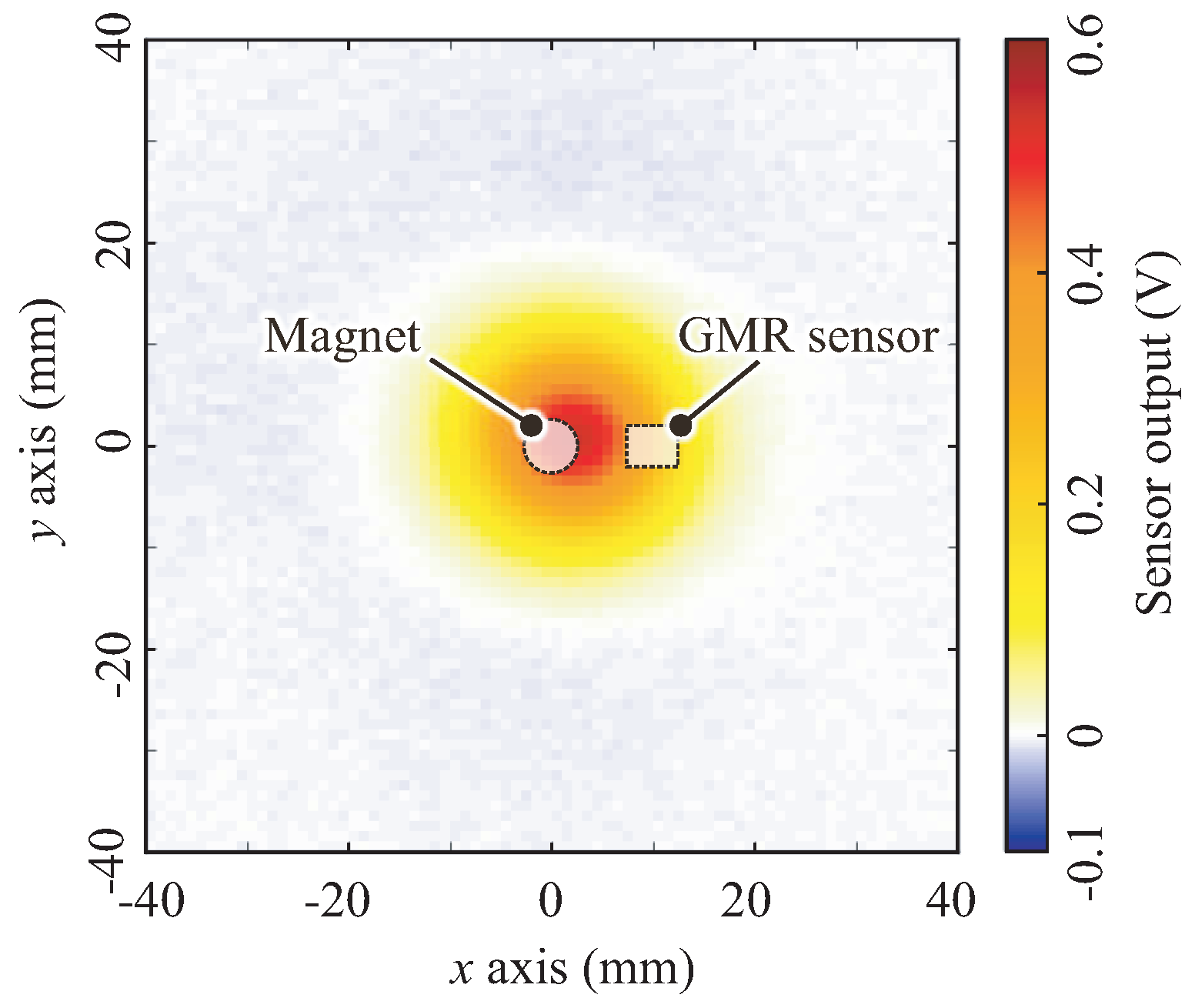
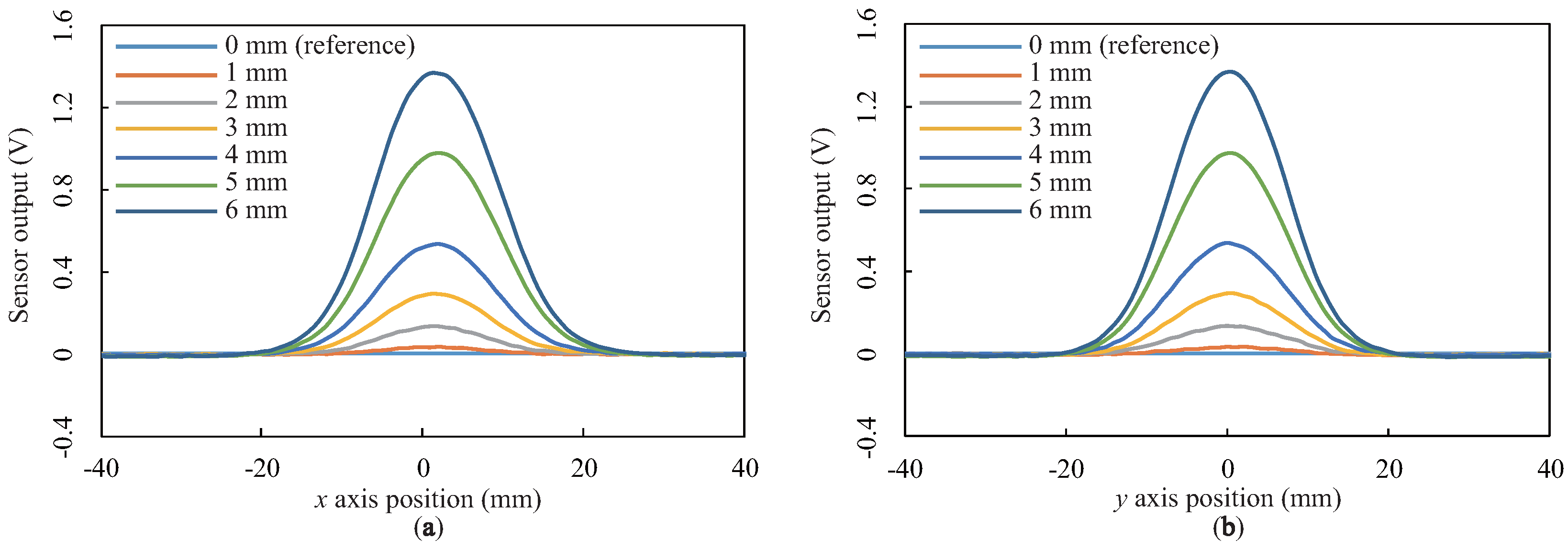
- The distorted Gaussian-like unipolar spatial response shown in Figure 11 reflects the spatial response generated by the proposed sensing mechanism, i.e., the change in the magnetic field caused by approaching the MRE.
- The shape of the spatial response is approximately elliptical, whose major axis corresponds to the line connecting the centers of the magnet and GMR sensor.
- The center of the spatial response (, ) is at a point that is closer to the magnet along the line connecting the centers of the magnet and GMR sensor.
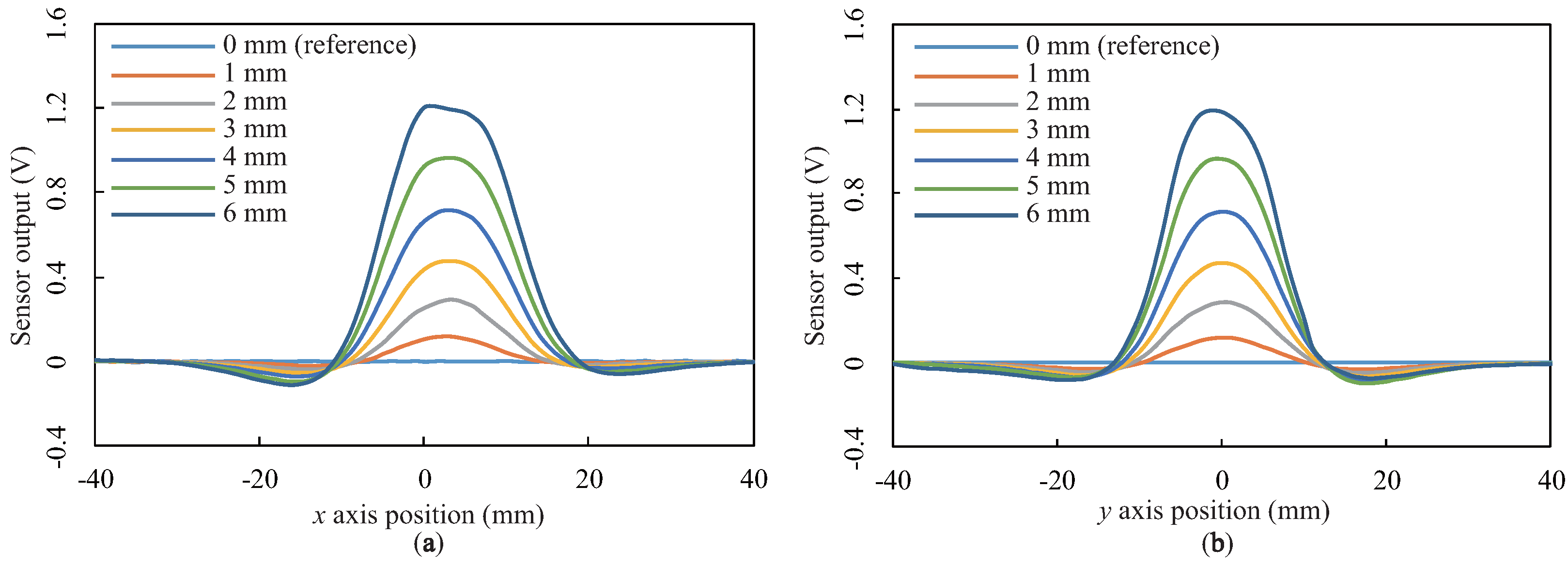
- The use of an incompressible elastomer adds a negative response to the unipolar spatial response; then, the entire spatial response becomes a distorted Mexican-hat-like bipolar spatial response, as shown in Figure 9.
5.2.1. Modeling of the Sensor Response Generated by Approaching the MRE
5.2.2. Modeling of the Bipolar Response
5.3. Usefulness of the Mexican-Hat-Like Spatial Response for Tactile Information Processing
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Minato, T.; Yoshikawa, Y.; Noda, T.; Ikemoto, S.; Ishiguro, H.; Asada, M. CB2: A Child Robot with Biomimetic Body for Cognitive Developmental Robotics. In Proceedings of the 2007 7th IEEE-RAS International Conference on Humanoid Robots (Humanoids), Pittsburgh, PA, USA, 29 November–1 December 2007; pp. 557–562. [Google Scholar]
- Maiolino, P.; Maggiali, M.; Cannata, G.; Metta, G.; Natale, L. A Flexible and Robust Large Scale Capacitive Tactile System for Robots. IEEE Sens. J. 2010, 13, 3910–3917. [Google Scholar] [CrossRef]
- Argall, B.D.; Billard, A.G. Survey of Tactile Human—Robot Interactions. Robot. Auton. Syst. 2010, 58, 1159–1176. [Google Scholar] [CrossRef]
- Kawasetsu, T.; Horii, T.; Ishihara, H.; Asada, M. Difference of Gaussian Like Feature Enhances Object Classification Accuracy in Magnetorheological Elastomer-Gel Tactile Sensor. In Proceedings of the 2016 IEEE International Conference Humanoid Robots (Humanoids) Workshop on Tactile Sensing for Manipulation: New Progress and Challenges, Cancun, Mexico, 15–17 November 2016. [Google Scholar]
- Kawasetsu, T.; Horii, T.; Ishihara, H.; Asada, M. Deformation Response of a Magnetic Type Tactile Sensor with a Two-Layered Surface Made of a Non-magnetic and a Magnetorheological Elastomer. J. Jpn. Soc. Appl. Electromagn. Mech. 2016, 24, 204–209. (In Japanese) [Google Scholar] [CrossRef]
- Kawasetsu, T.; Horii, T.; Ishihara, H.; Asada, M. Magnetorheological Elastomer-Gel Tactile Sensor with an Electromagnet. In Proceedings of the 2017 International Conference on Robotics and Automation (ICRA) Workshop on the Robotic Sense of Touch: From Sensing to Understanding, Marina Bay Sands, Singapore, 29 May–3 June 2017. [Google Scholar]
- Dahiya, R.S.; Metta, G.; Valle, M.; Sandini, G. Tactile Sensing—From Humans to Humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar] [CrossRef]
- Dahiya, R.S.; Mittendorfer, P.; Valle, M.; Cheng, G.; Lumelsky, V.J. Directions Toward Effective Utilization of Tactile Skin: A Review. IEEE Sens. J. 2013, 13, 4121–4138. [Google Scholar] [CrossRef]
- Hosoda, K.; Tada, Y.; Asada, M. Anthropomorphic Robotic Soft Fingertip with Randomly Distributed Receptors. Robot. Auton. Syst. 2006, 54, 104–109. [Google Scholar] [CrossRef]
- Song, A.; Han, Y.; Hu, H.; Li, J. A Novel Texture Sensor for Fabric Texture Measurement and Classification. IEEE Trans. Instrum. Meas. 2014, 63, 1739–1747. [Google Scholar] [CrossRef]
- Hu, H.; Han, Y.; Song, A.; Chen, S.; Wang, C.; Wang, Z. A Finger-Shaped Tactile Sensor for Fabric Surfaces Evaluation by 2-Dimensional Active Sliding Touch. Sensors 2014, 14, 4899–4913. [Google Scholar] [CrossRef] [PubMed]
- Futai, N.; Matsumoto, K.; Shimoyama, I. A Flexible Micromachined Planar Spiral Inductor for Use as an Artificial Tactile Mechanoreceptor. Sens. Actuators A 2004, 111, 293–303. [Google Scholar] [CrossRef]
- Goka, M.; Nakamoto, H.; Takenawa, S. A Magnetic Type Tactile Sensor by GMR Elements and Inductors. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010; pp. 885–890. [Google Scholar]
- Kim, J.; Lee, M.; Shim, H.J.; Ghaffari, R.; Cho, H.R.; Son, D.; Jung, Y.H.; Soh, M.; Choi, C.; Jung, S.; et al. Stretchable Silicon Nanoribbon Electronics for Skin Prosthesis. Nat. Commun. 2014, 5. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Reuveny, A.; Reeder, J.; Lee, S.; Jin, H.; Liu, Q.; Yokota, T.; Sekitani, T.; Isoyama, T.; Abe, Y.; et al. A Transparent Bending-Insensitive Pressure Sensor. Nat. Nanotechnol. 2016, 11, 472–478. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Dong, L.; Zhang, H.; Yu, R.; Pan, C.; Wang, Z.L. Recent Progress in Electronic Skin. Adv. Sci. 2015, 2. [Google Scholar] [CrossRef] [PubMed]
- Drimus, A.; Kootstra, G.; Bilberg, A.; Kragic, D. Design of a flexible tactile sensor for classification of rigid and deformable objects. Robot. Auton. Syst. 2014, 62, 3–15. [Google Scholar] [CrossRef]
- Lepora, N.F.; Martinez-Hernandez, U.; Prescott, T.J. Active touch for robust perception under position uncertainty. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 3020–3025. [Google Scholar]
- Buescher, G.H.; Koiva, R.; Schuermann, C.; Haschke, R.; Ritter, H.J. Flexible and Stretchable Fabric-Based Tactile Sensor. Robot. Auton. Syst. 2015, 63, 244–252. [Google Scholar] [CrossRef]
- Shimojo, M.; Araki, T.; Teshigawara, S.; Ming, A.; Ishikawa, M. A Net-Structure Tactile Sensor Covering Free-form Surface and Ensuring High-Speed Response. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Diego, CA, USA, 29 October–2 November 2007; pp. 670–675. [Google Scholar]
- Mukai, T.; Onishi, M.; Odashima, T.; Hirano, S.; Luo, Z. Development of the Tactile Sensor System of a Human-Interactive Robot “RI-MAN”. IEEE Trans. Robot. 2008, 24, 505–512. [Google Scholar] [CrossRef]
- Ohmura, Y.; Kuniyoshi, Y.; Nagakubo, A. Conformable and Scalable Tactile Sensor Skin for Curved Surfaces. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA), Orlando, FL, USA, 15–19 May 2006; pp. 1348–1353. [Google Scholar]
- Mittendorfer, P.; Cheng, G. Humanoid Multimodal Tactile Sensing Modules. IEEE Trans. Robot. 2011, 27, 401–410. [Google Scholar] [CrossRef]
- Shimojo, M. Spatial Filtering Characteristic of Elastic Cover for Tactile Sensor. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation (ICRA), San Diego, CA, USA, 8–13 May 1994; pp. 287–292. [Google Scholar]
- Jamone, L.; Natale, L.; Metta, G.; Sandini, G. Highly Sensitive Soft Tactile Sensors for an Anthropomorphic Robotic Hand. IEEE Sens. J. 2015, 15, 4226–4233. [Google Scholar] [CrossRef]
- Youssefian, S.; Rahbar, N.; Torres-Jara, R. Contact Behavior of Soft Spherical Tactile Sensors. IEEE Sens. J. 2014, 14, 1435–1442. [Google Scholar] [CrossRef]
- Tomo, T.P.; Somlor, S.; Schmitz, A.; Jamone, L.; Huang, W.; Kristanto, H.; Sugano, S. Design and Characterization of a Three-Axis Hall Effect-Based Soft Skin Sensor. Sensors 2016, 16, 491. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Han, H.; Liu, T.; Yi, J.; Li, Q.; Inoue, Y. A Novel Tactile Sensor with Electromagnetic Induction and Its Application on Stick-Slip Interaction Detection. Sensors 2016, 16, 430. [Google Scholar] [CrossRef] [PubMed]
- Kamiyama, K.; Vlack, K.; Mizota, T.; Kajimoto, H.; Kawakami, K.; Tachi, S. Vision-Based Sensor for Real-Time Measuring of Surface Traction Fields. IEEE Comput. Graph. Appl. 2005, 25, 68–75. [Google Scholar] [CrossRef] [PubMed]
- Takagi, S.; Yamamoto, Y.; Ohka, M.; Yussof, H.; Abdullah, S.C. Sensitivity-Enhancing All-in-Type Optical Three-Axis Tactile Sensor Mounted on Articulated Robotic Fingers. Procedia Comput. Sci. 2015, 76, 95–100. [Google Scholar] [CrossRef]
- Yamaguchi, A.; Atkeson, C.G. Combining Finger Vision and Optical Tactile Sensing: Reducing and Handling Errors While Cutting Vegetables. In Proceedings of the 2016 IEEE-RAS International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016; pp. 1045–1051. [Google Scholar]
- Pruszynski, J.A.; Johansson, R.S. Edge-Orientation Processing in First-Order Tactile Neurons. Nat. Neurosci. 2014, 17, 1404–1410. [Google Scholar] [CrossRef] [PubMed]
- Luo, S.; Mou, W.; Althoefer, K.; Liu, H. Novel Tactile-SIFT Descriptor for Object Shape Recognition. IEEE Sens. J. 2015, 15, 5001–5009. [Google Scholar] [CrossRef]

© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kawasetsu, T.; Horii, T.; Ishihara, H.; Asada, M. Mexican-Hat-Like Response in a Flexible Tactile Sensor Using a Magnetorheological Elastomer. Sensors 2018, 18, 587. https://doi.org/10.3390/s18020587
Kawasetsu T, Horii T, Ishihara H, Asada M. Mexican-Hat-Like Response in a Flexible Tactile Sensor Using a Magnetorheological Elastomer. Sensors. 2018; 18(2):587. https://doi.org/10.3390/s18020587
Chicago/Turabian StyleKawasetsu, Takumi, Takato Horii, Hisashi Ishihara, and Minoru Asada. 2018. "Mexican-Hat-Like Response in a Flexible Tactile Sensor Using a Magnetorheological Elastomer" Sensors 18, no. 2: 587. https://doi.org/10.3390/s18020587
APA StyleKawasetsu, T., Horii, T., Ishihara, H., & Asada, M. (2018). Mexican-Hat-Like Response in a Flexible Tactile Sensor Using a Magnetorheological Elastomer. Sensors, 18(2), 587. https://doi.org/10.3390/s18020587