4.1. Analysis of the Signal Gain Based on the Vertical Directionality and Correlation
The spatial gain distribution is significant in designing sonar equipment and determining the performance and deployment of the array. According to
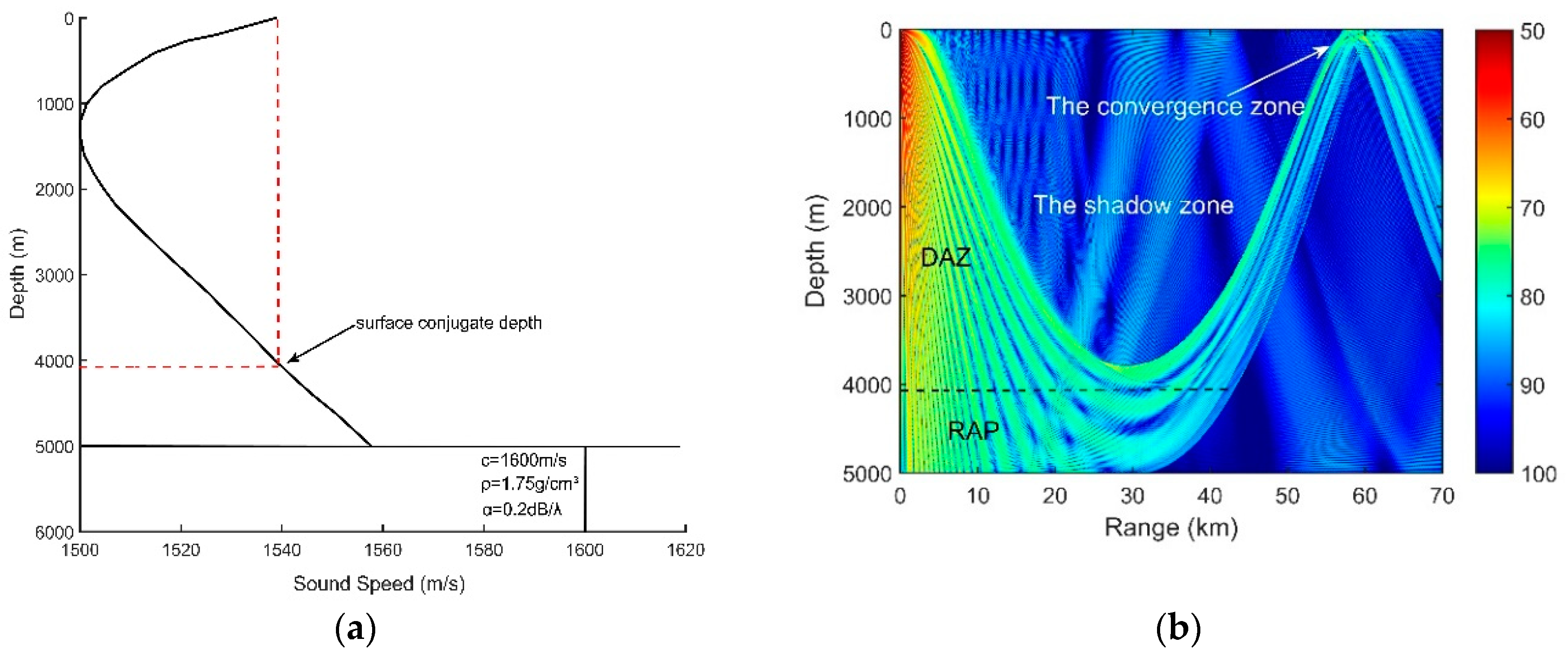
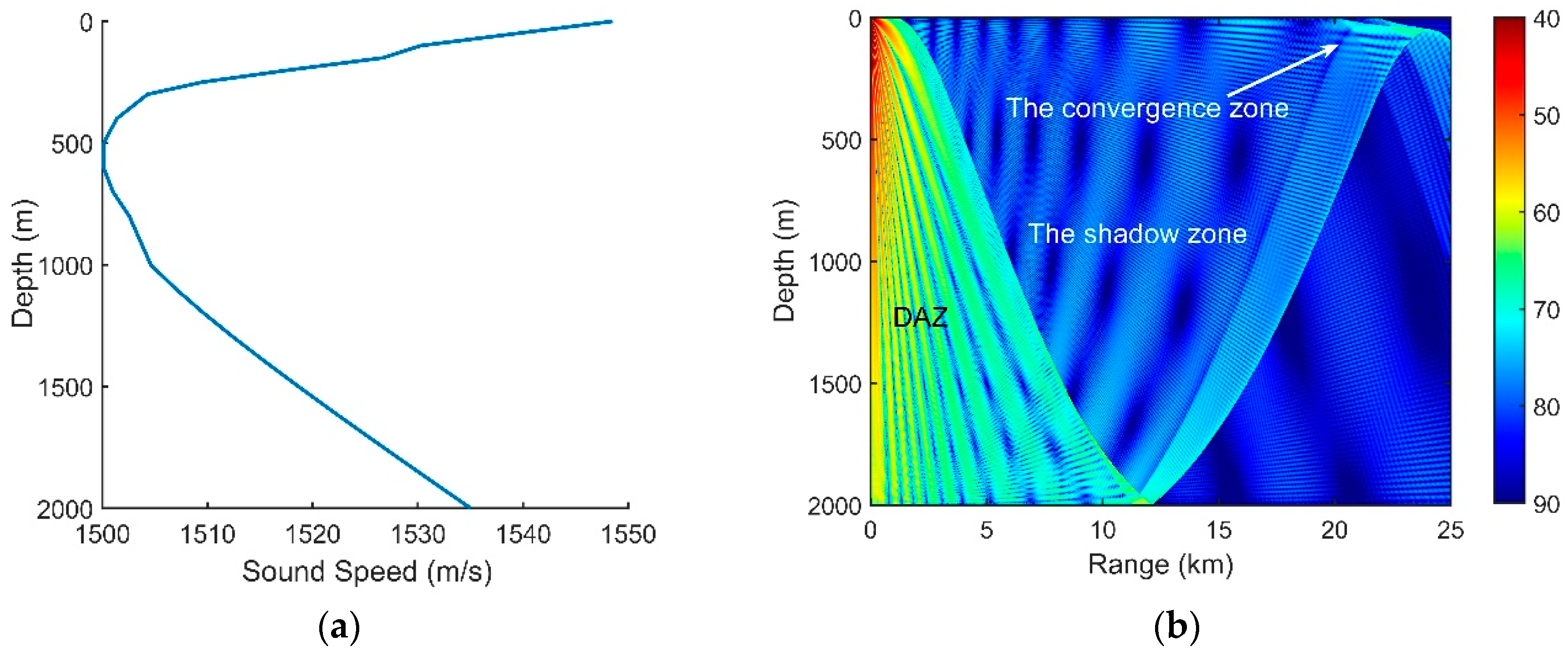
Section 3.3, the spatial gain obtained through CBF can be traced to the correlation coefficients of the signals and noise associated with the signals. We consider a deep ocean with the same acoustic parameters in
Figure 1a. The target is at the depth of 100 m, radiating a sweeping frequency signal with the central frequency of 100 Hz and a bandwidth of 50 Hz. The vertical line array has an equal spacing of 15 m (
) and contains 16 elements. By using BELLHOP model, we can generate a two-dimensional mesh in which the received signal of every point can be simulated based on ray theory, and then the SG of every point can be calculated according to Equation (19).
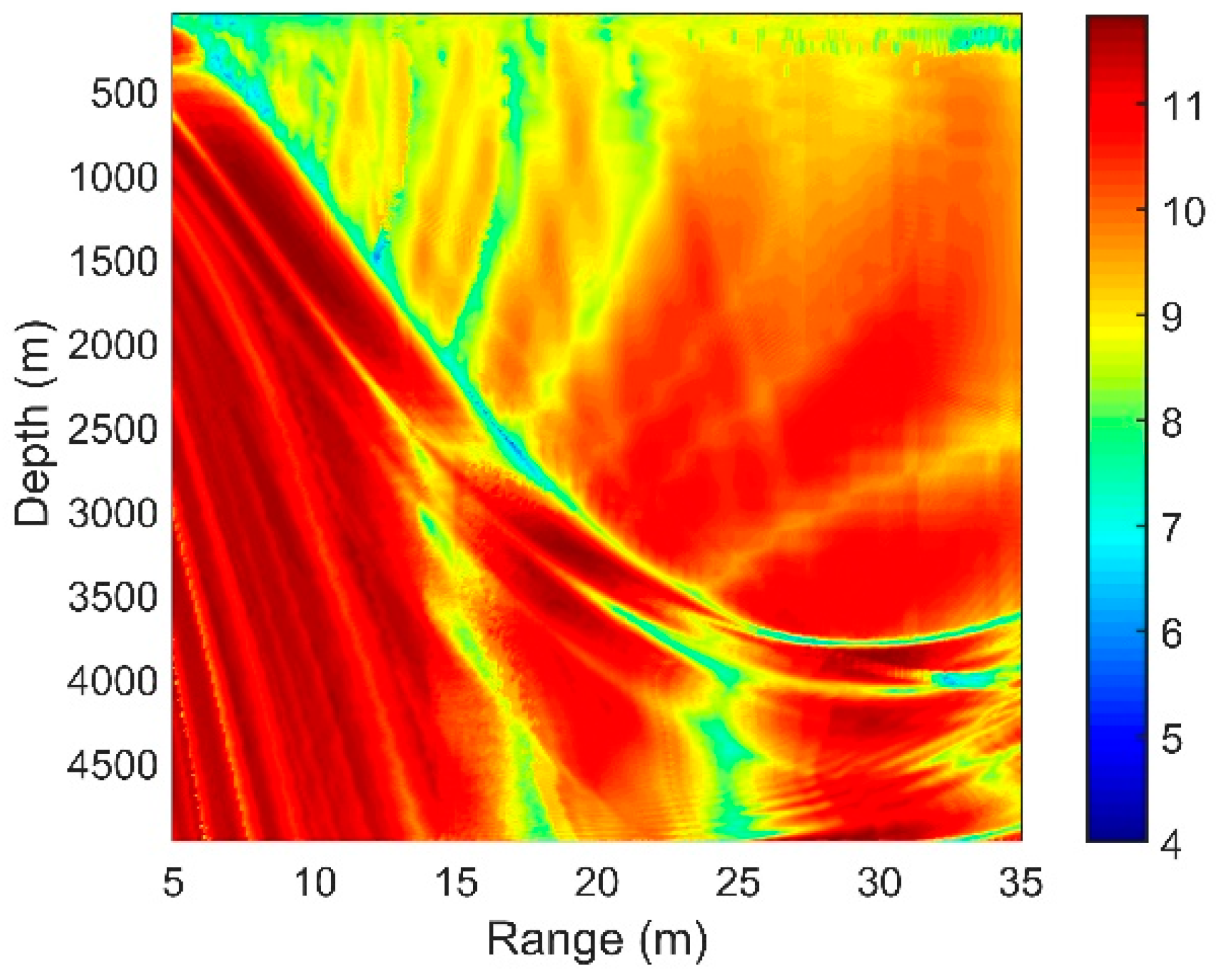
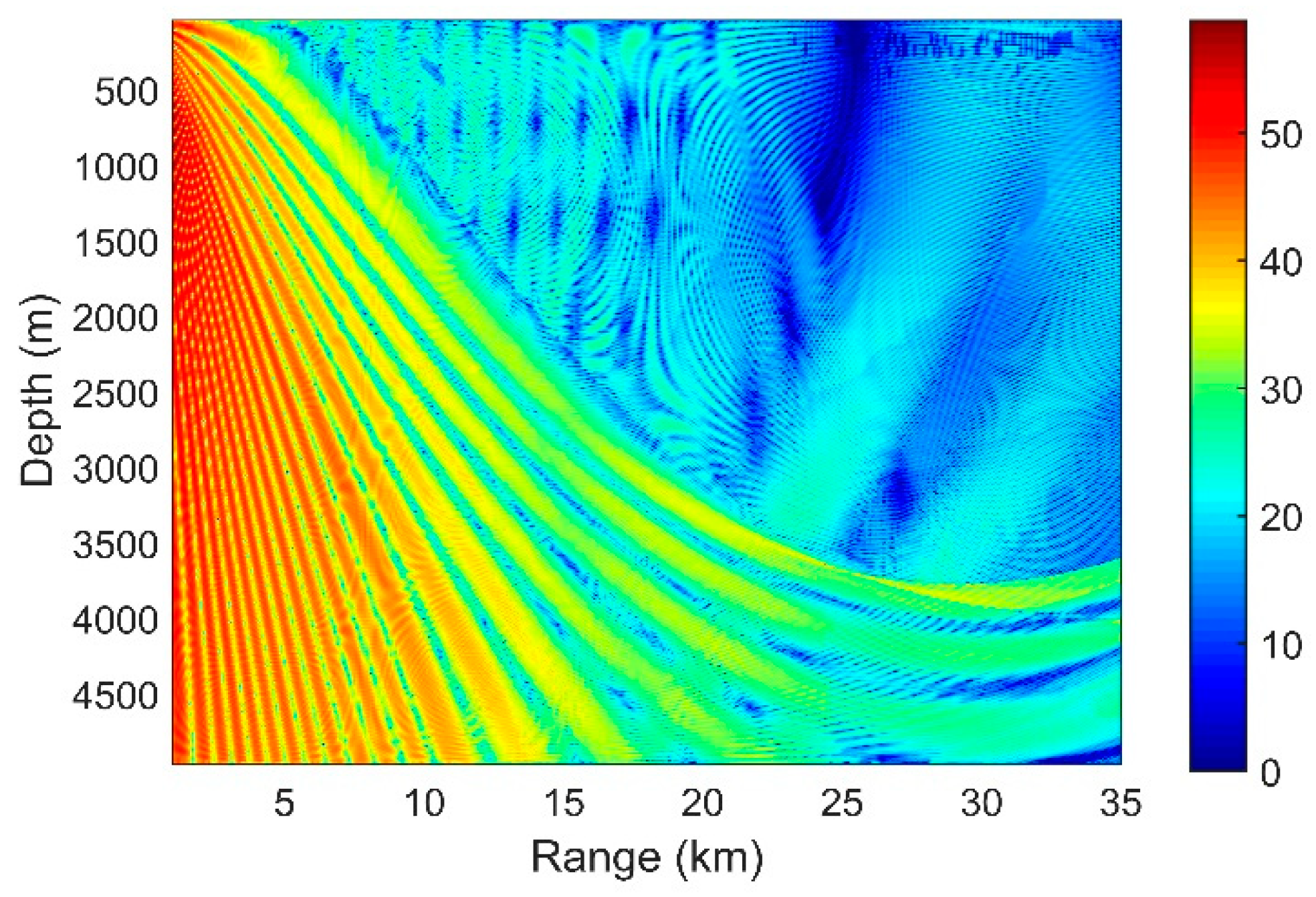
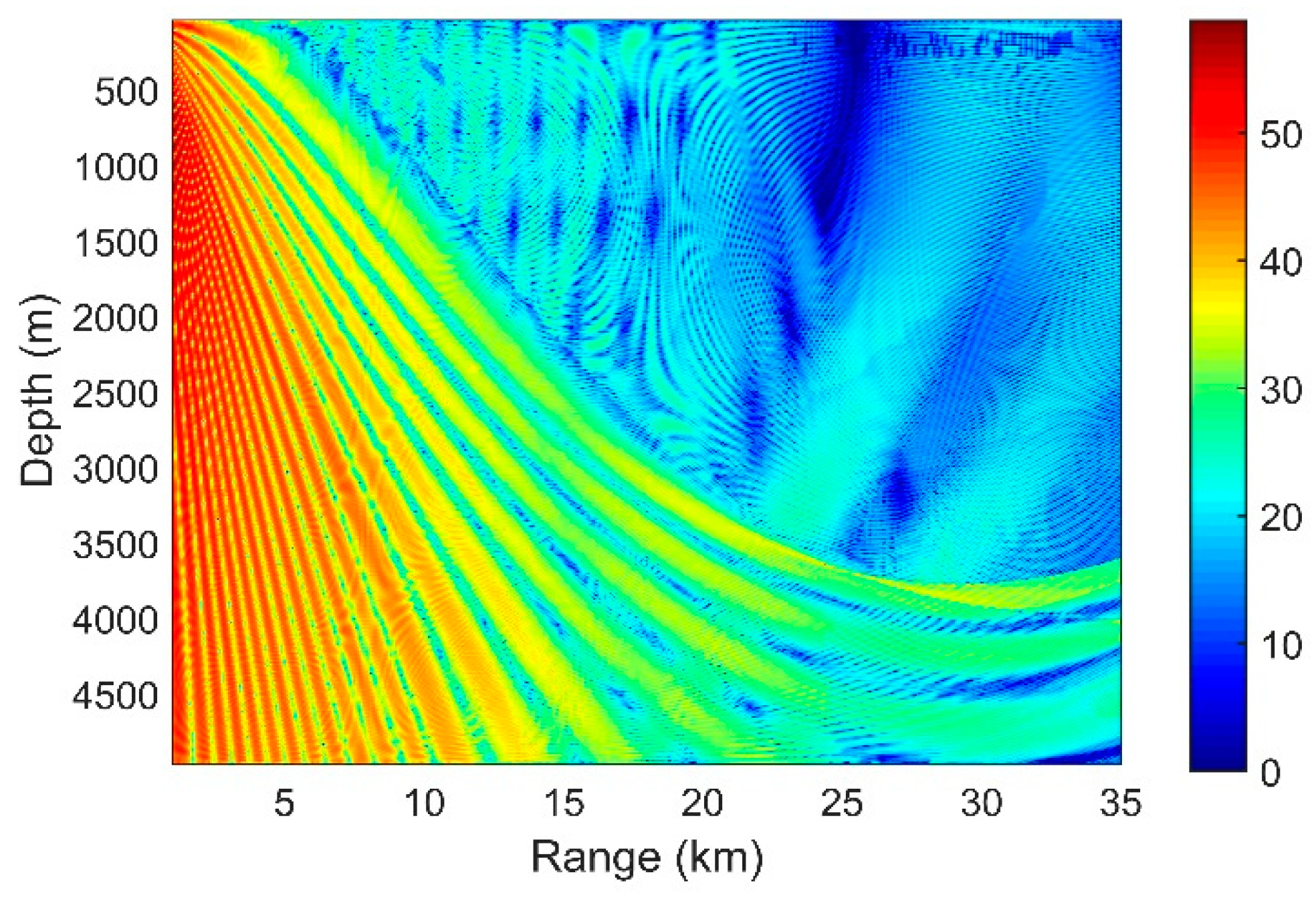
Figure 6 shows the SG with different array locations.
In the DAZ, the SG is large along the ray path where the constructive interference between D and S1B0 appear. As demonstrated in
Section 2.1, the acoustic fields in these areas are mainly composed of D and S1B0, whose arrival angles are approximately equivalent on every element of the array. Hence, the received signal’s phase difference between two neighbouring elements is almost fixed. Since the array elements are almost in the same phase plane with the proper phase shift, the SG is relatively large but could still not exceed 10
log16 dB. At the same time, the SG declines slightly along the path where the destructive interference between D and S1B0 appear. Other than D and S1B0, S0B1 and S1B1 also contribute to the sound field here. The received signals with the proper phase shift by CBF still has large phase distortion due to the large differences in the multipath arrival angles. Hence, the correlations between the signals are relatively poor.
It is worthwhile to note that the theoretical solution of the vertical correlation coefficient based on the ray model can also be used to interpret the decline. According to [
4], the vertical correlation coefficient in the frequency domain can be written as:
where
and
are the complex spectra of the acoustic signals
and
, respectively. In addition,
ω1 and
ω2 are the lower and upper angular frequencies of the filtered acoustic signals, respectively. When the acoustic field can be written simply as the sum of the contributions of D and S1B0, we have:
where
and
are the amplitude and arrival time of D, respectively, and
and
are those for S1B0. We assume that
, where
is the center angular frequency. Therefore,
in Equation (25) can be simplified as:
Swhere
and
are the relative time delays of D and S1B0 for the receiver depths of
and
, respectively.
Seen from Equation (27), the vertical correlation coefficient has an oscillatory period depending on both the center angular frequency
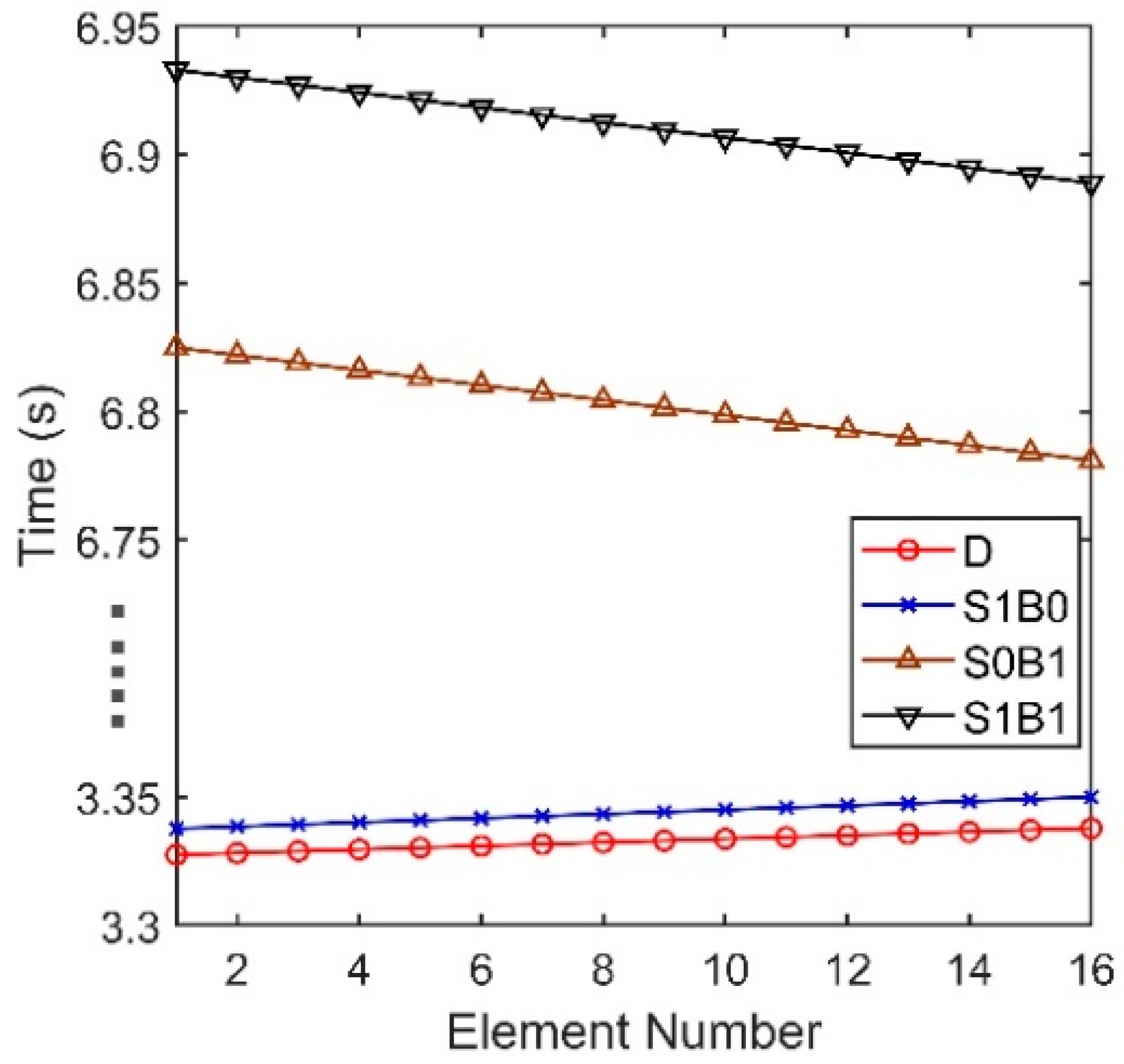
and the differences in the relative time delays at two different element depths. As shown in
Figure 3, if the location is dominated by D and S1B0, whose relative time delays at different depths remain almost constant, the correlation coefficients between pairs of hydrophones can be close to 1. Hence, the SG in these areas will be high.
Overall, if the acoustic field is dominated by the other two types of arrivals, the vertical correlations can also be predicated by Equation (27), with
being the relative time delay of the other two types of arrivals. Next, we consider the locations where the acoustic field is dominated by D, S1B0 and S0B1. From
Figure 3, the lines of the arrival times of D and S1B0 are approximately parallel, and thus, we can regard the arrival times of D as the reference. The relative time delays of D and S0B1 decrease with an increase in the element number. Consequently, the correlation coefficients between pairs of hydrophones will be oscillatory, and the SG in these areas will decline.
For the RAP, the SG is large in most of the space other than the array locations for which the range of the sources is 24 to 28 km. This finding is mainly caused by the variety of structure in the multipath arrivals.
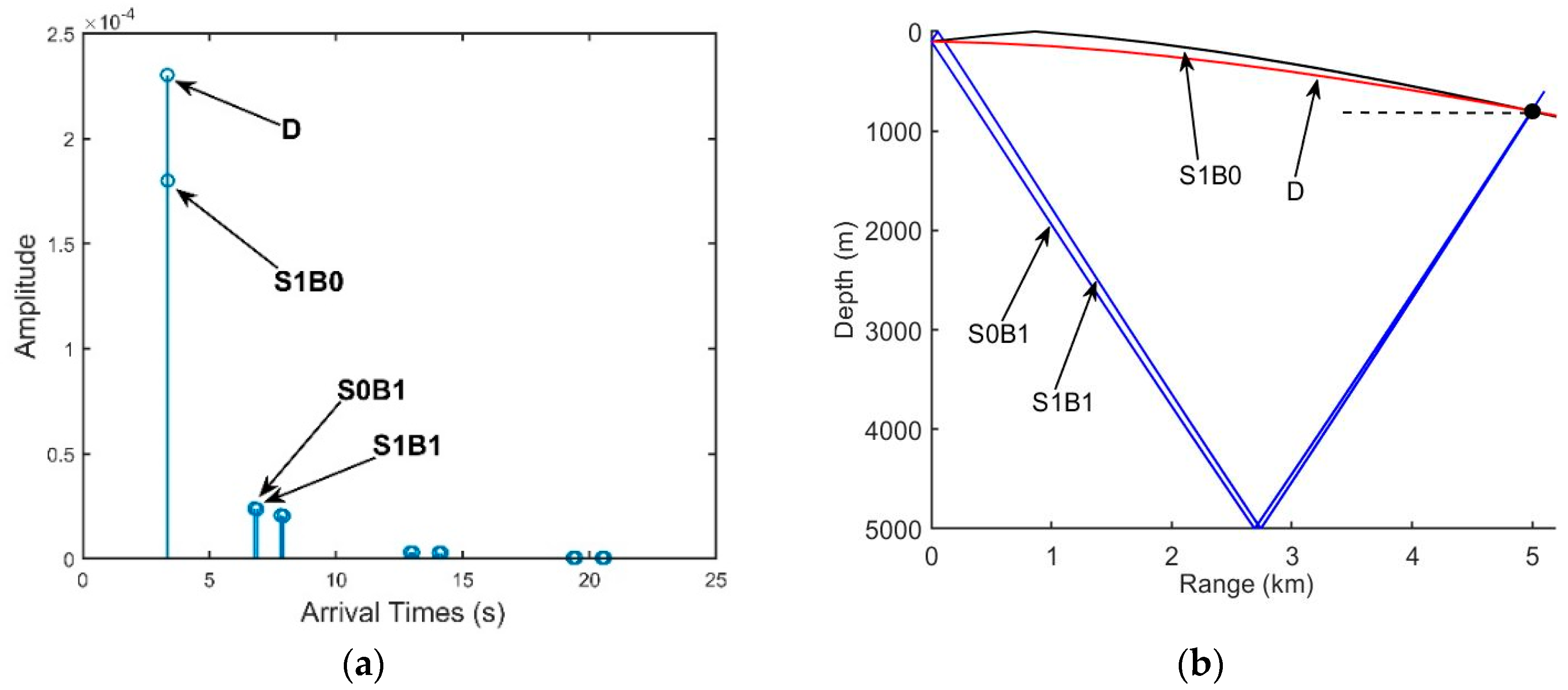
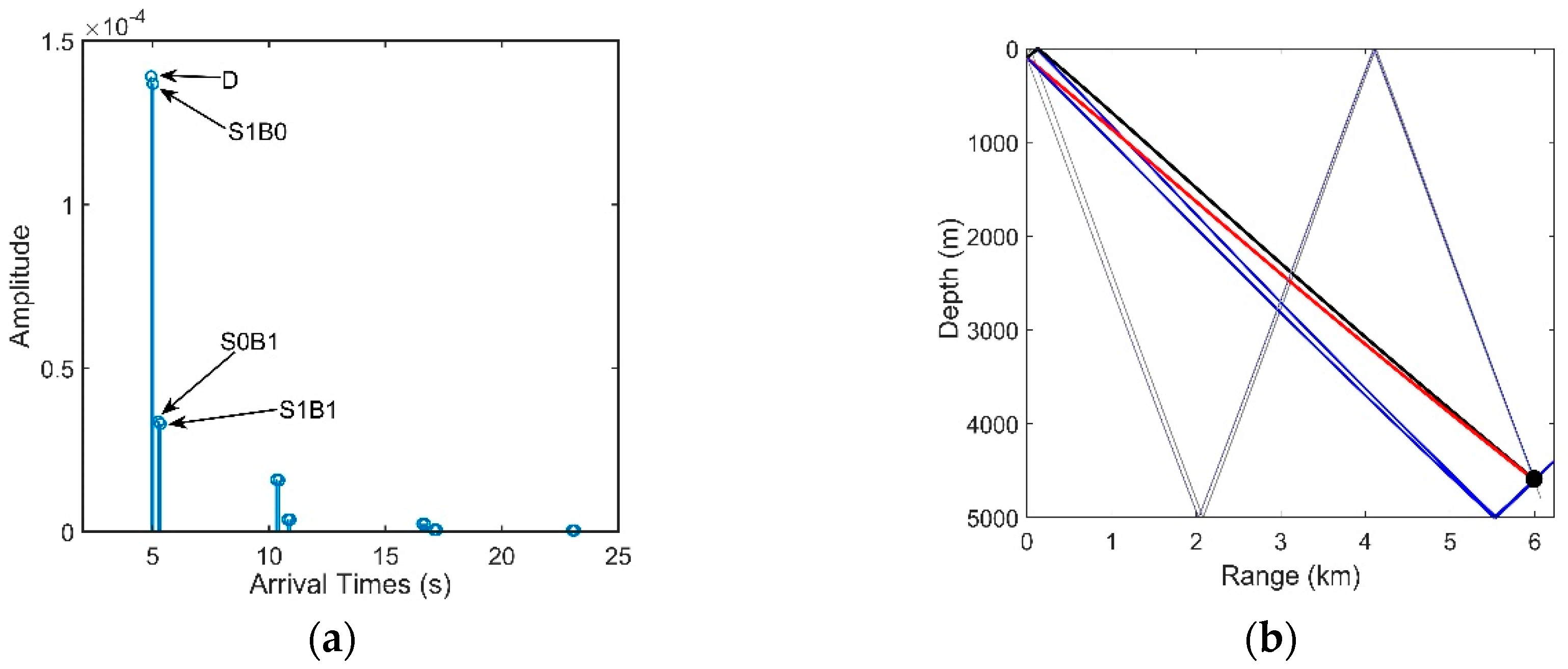
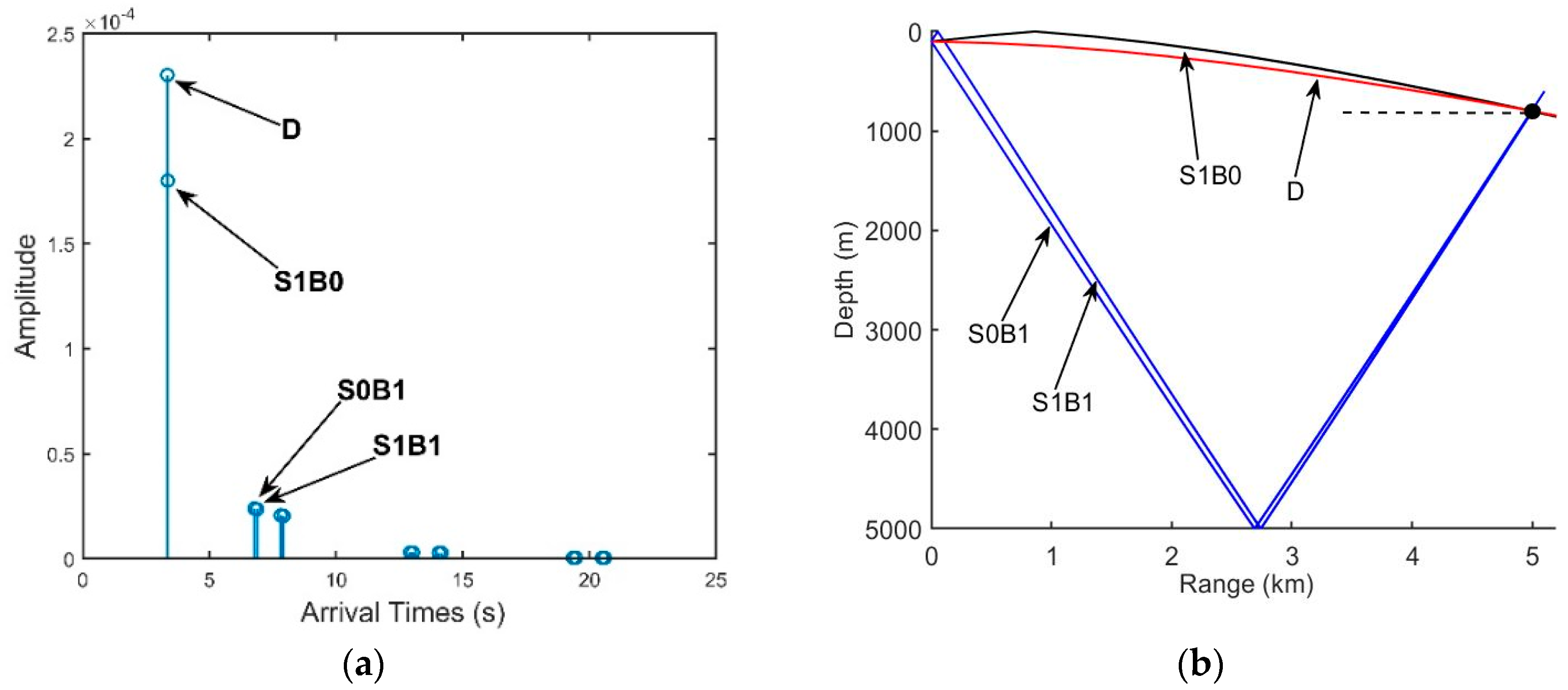
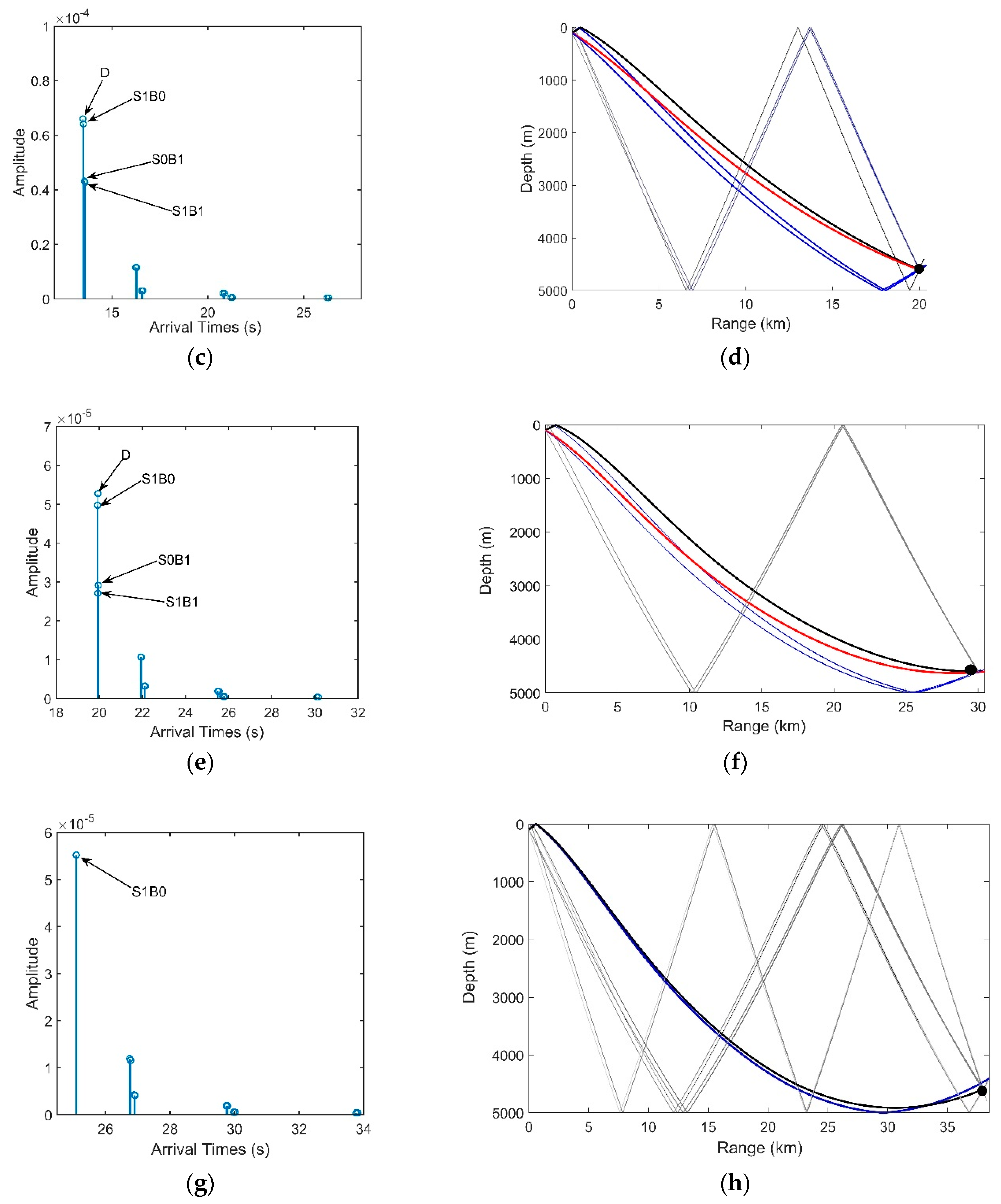
The arrival structures of the eigenrays from a 100-m deep source to the hydrophone at a depth of 4550 m in a range-independent ocean are shown in
Figure 7. Four horizontal ranges of the source are assumed to be 6, 20, 30, and 38 km, respectively. Other acoustic parameters are the same as those in
Figure 1a. The rays that penetrate into the bottom are neglected, and thus, the acoustic properties of the half-space are chosen to simulate the sediment layer in the deep ocean. The frequency for the simulation is 150 Hz. At the range of 6 km, only D and S1B0 are significant. At this range, rays penetrate into the bottom with large grazing angles, and thus, major energy is attenuated in the substrate [
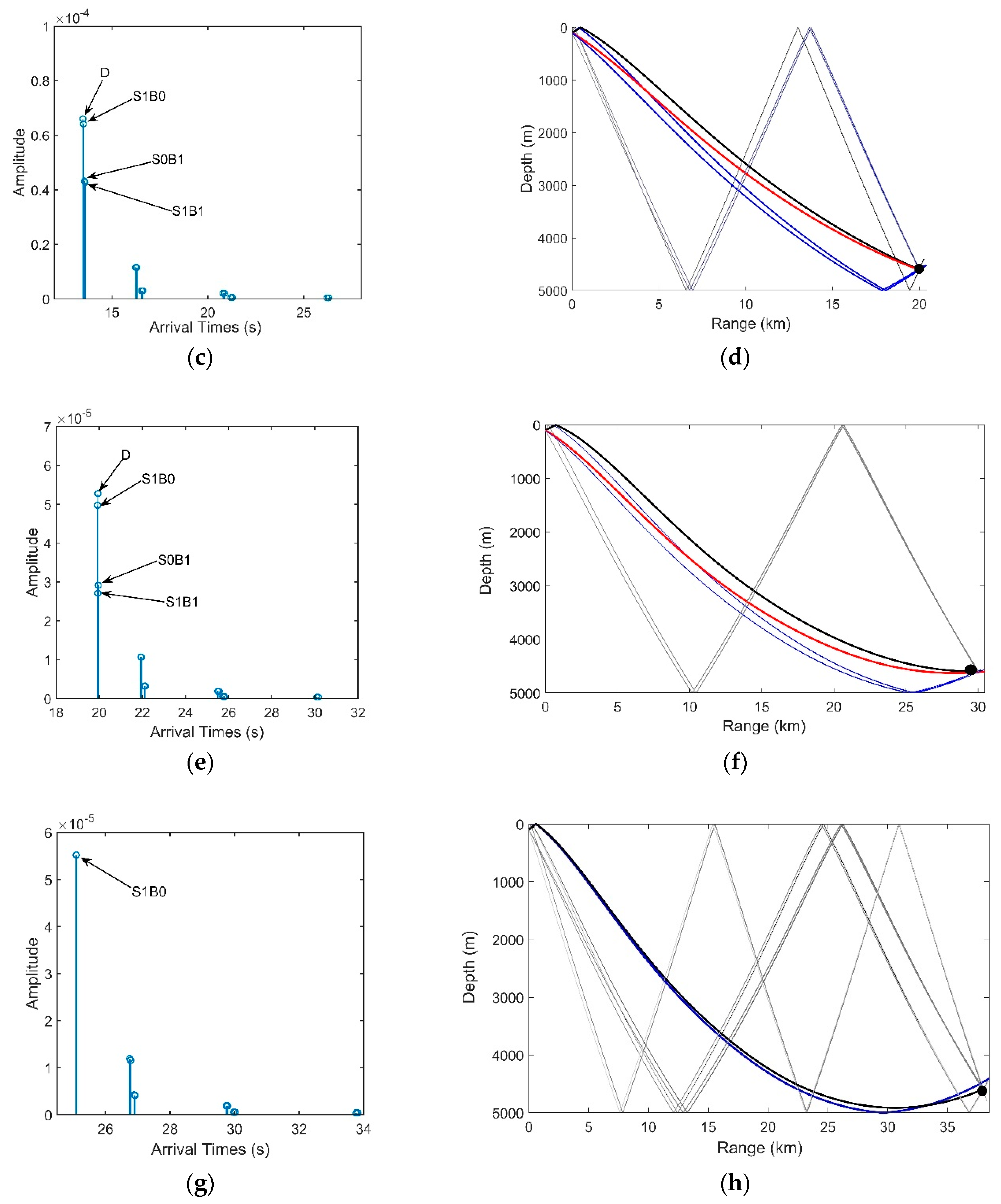
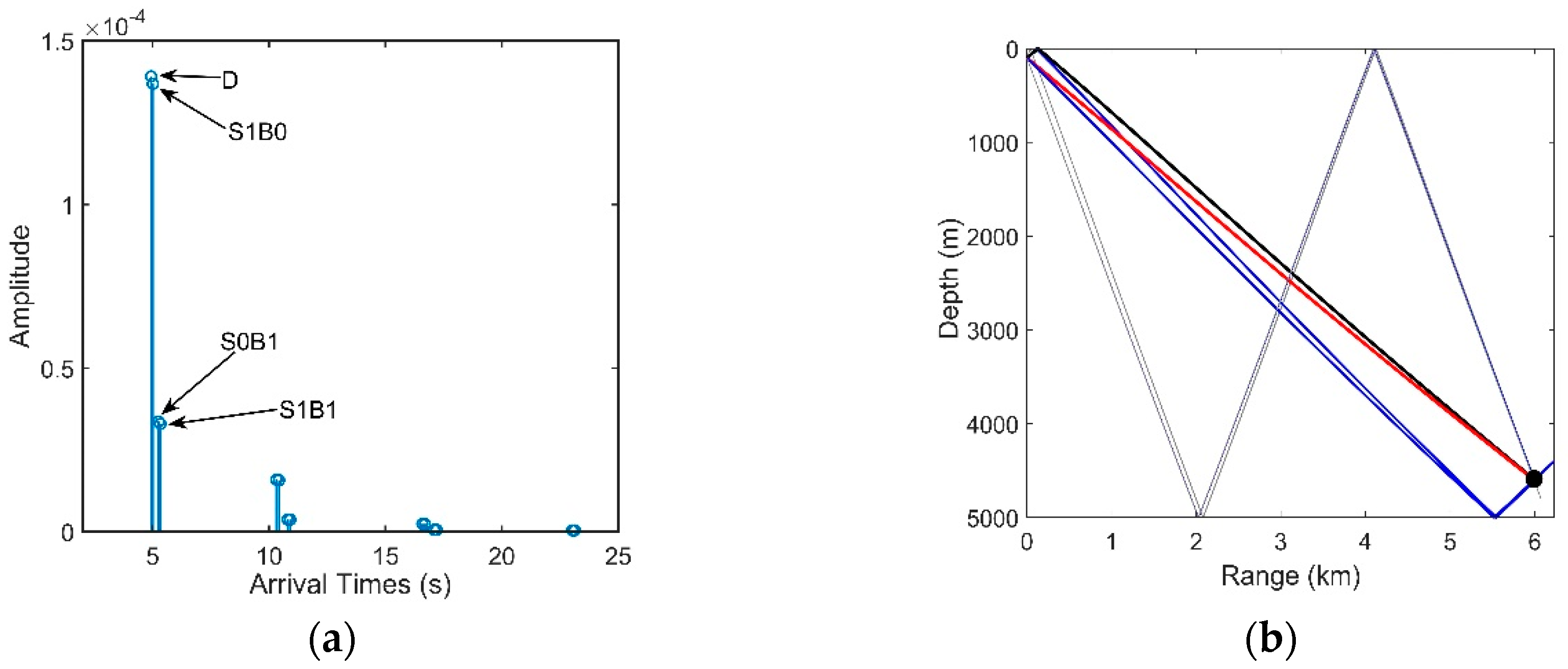
17]. When the source is fixed at 20 km in the range, in addition to D and S1B0, the S0B1 and S1B1 become significant. As the rays penetrate into the bottom with smaller grazing angles, more energy is reflected into the water. Therefore, the SG declines to approximately 7–8 dB when the source is located at 19–25 km because there is a relatively large difference in the multipath arrival angles between two groups of multipath signals (“D, S1B0” and “S0B1, S1B1”) with almost the same amount of energy. B1S0 is weak in this range due to the large grazing angle on the bottom and the additional geometric attenuation. For the source at 30 km, two new types of rays become significant. D, S0B1, and S1B1 are strongly bent, which indicates that they are close to being cut off by the gradient of the SSP. From
Figure 7f, the D, S0B1 and S1B1 are bent to approximately
in such a way that the arrival angles of these rays are approximately the same. The waveform distortion between pairs of hydrophones become small due to having only a small difference in the multiple arrival structures, and hence, a relatively high SG can be achieved through CBF. According to the definition of the RAP introduced in
Section 2.2, this source range is close to the edge of the RAP. At the source range of 38 km, the three types of rays are cut off, and the S1B0 exhibits strong bending; hence, this range is so long that it exceeds the region of the RAP.
4.2. Results of the Signal Gain
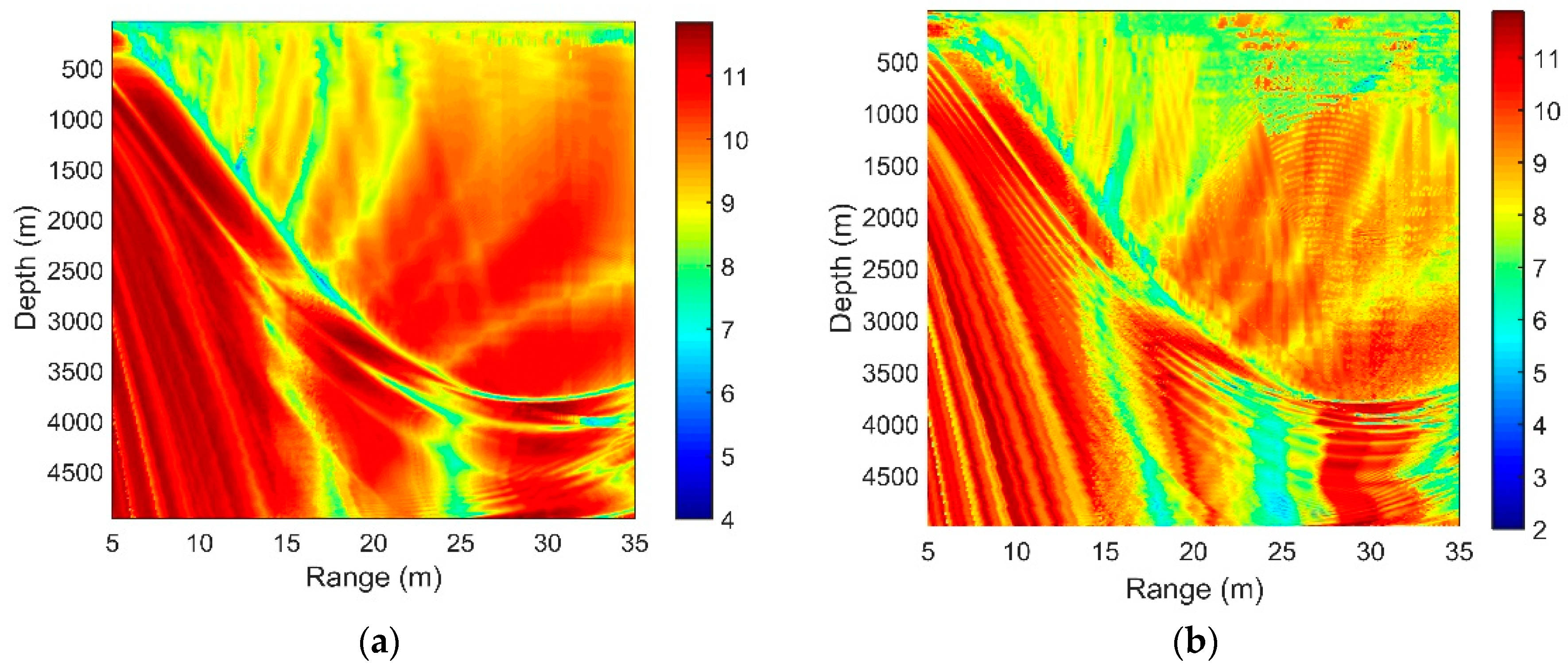
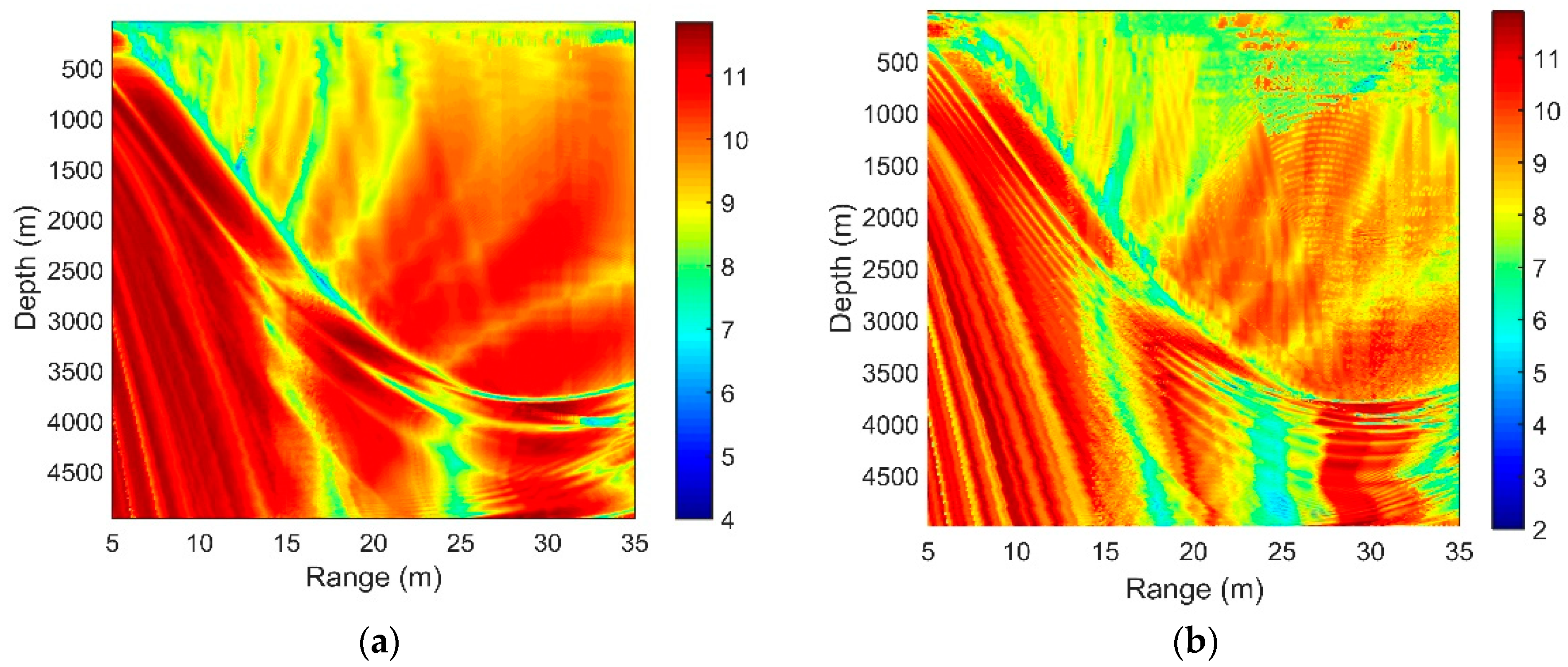
Figure 8a,b show the SG in different source frequencies. The source depths are both 100 m, and the separation of the hydrophones is
. We can see that as the source frequency increases, the interference striations are closer. With increasing acoustic frequency, the SG declines moderately.
Figure 9a–c present the SG with the source depths of 50 m, 100 m and 200 m, respectively. According to the
Lloyd-mirror interference pattern [
16], by simplifying, the received pressure of the sensor can be written as
where
is the fixed depth of the hydrophone, and
is the source depth, while
denotes the horizontal distance between the source and receiver. Equation (28) means that the frequency-dependent interference period decreases as the radiated frequency or source depth increases.
Figure 9a–c all match well with the Equation (28).
It can be found that the source depth (shallow source) has no substantial influence on the SG of the vertical line array achieved by the CBF.
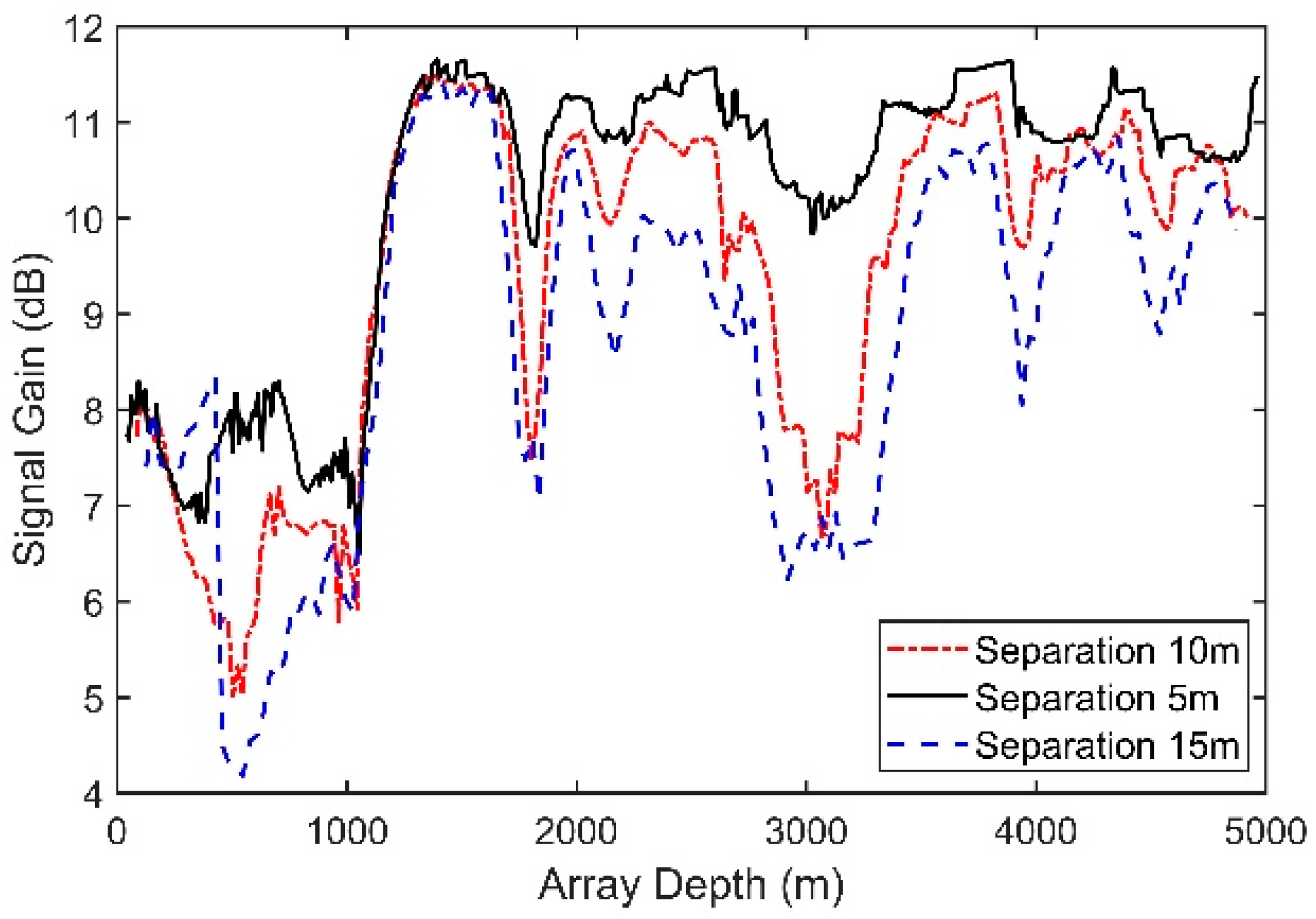
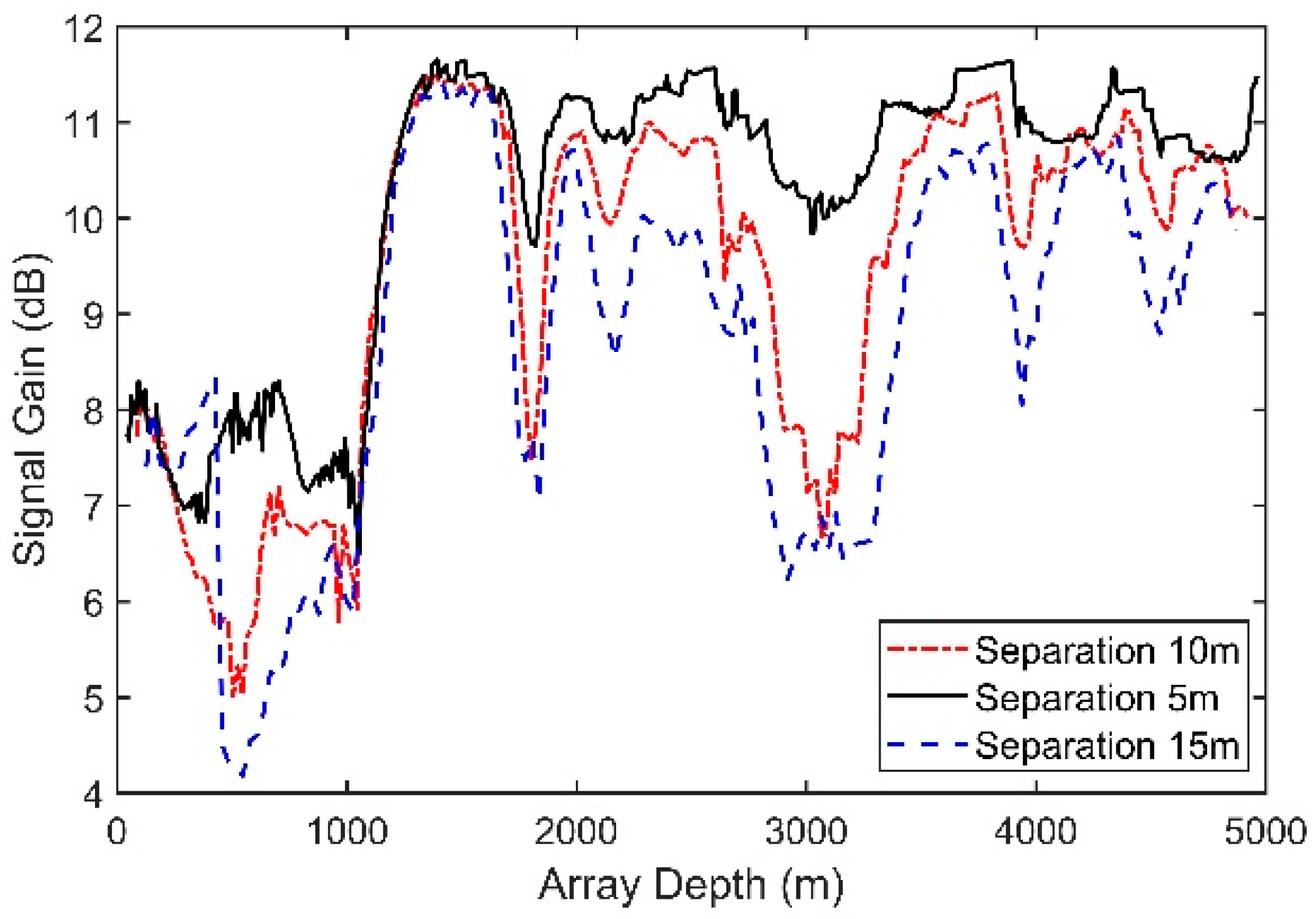
Figure 10 presents the SG for arrays with different separations of neighboring hydrophones. The vertical line array contains 16 elements, and the source radiates a 150-Hz signal with a depth of 100 m and a range of 10 km. With an increase in the element separation, the SG declines moderately. This trend occurs mainly because a high ratio of the element separation to the wavelength will lead to a greater difference between the multipath structures in different hydrophones.
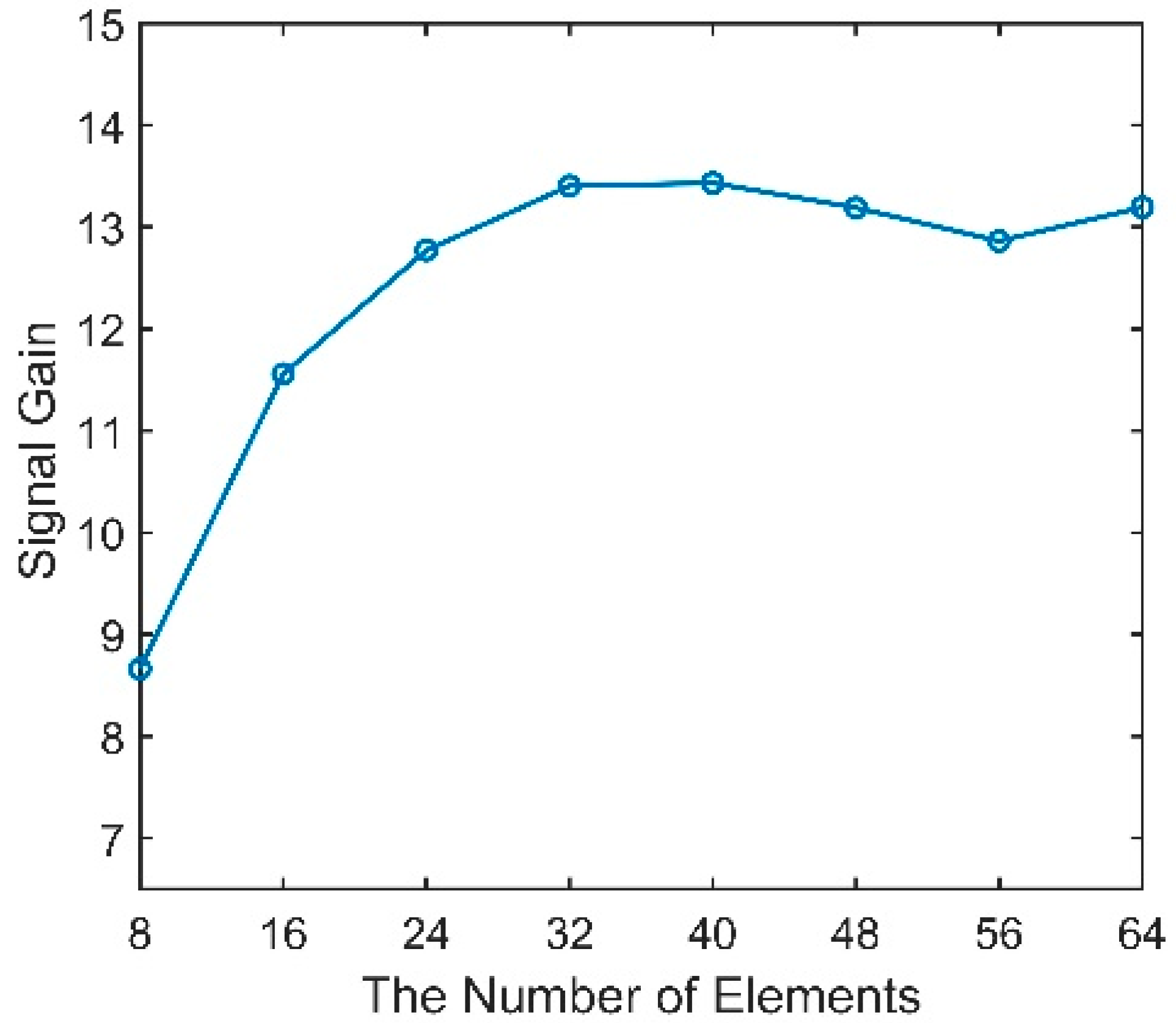
Figure 11 shows the variation in the SG with increasing numbers of hydrophones. Unlike the SG, which will increase logarithmically as the number of elements increases in a horizontal array, after increasing to a certain level, the SG here grows slowly and even begins to decrease. Similarly, this trend occurs mainly because a larger array aperture will lead to a greater difference between the multiple structures in the different hydrophones and, hence, to a lower coherence between signals. Therefore, simply increasing the number of elements in the vertical array has little effect.
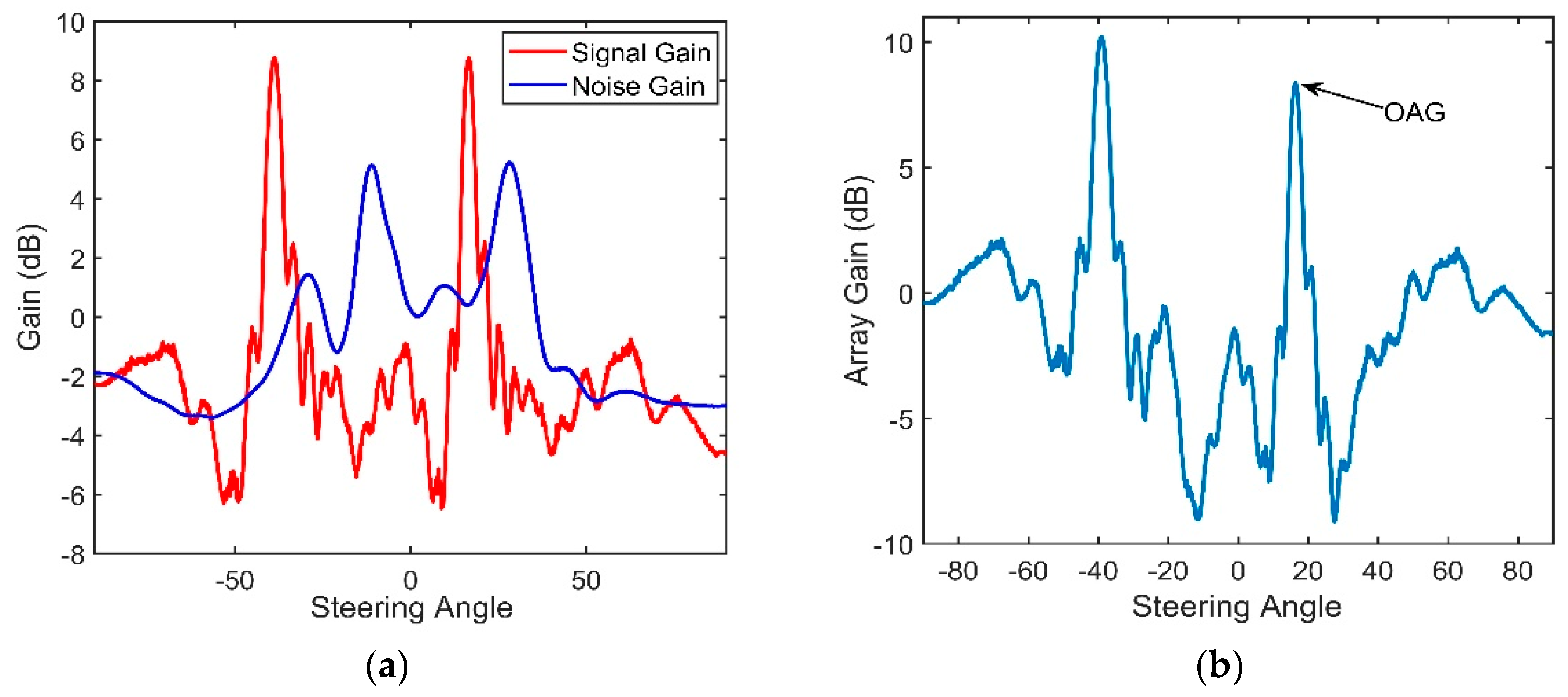
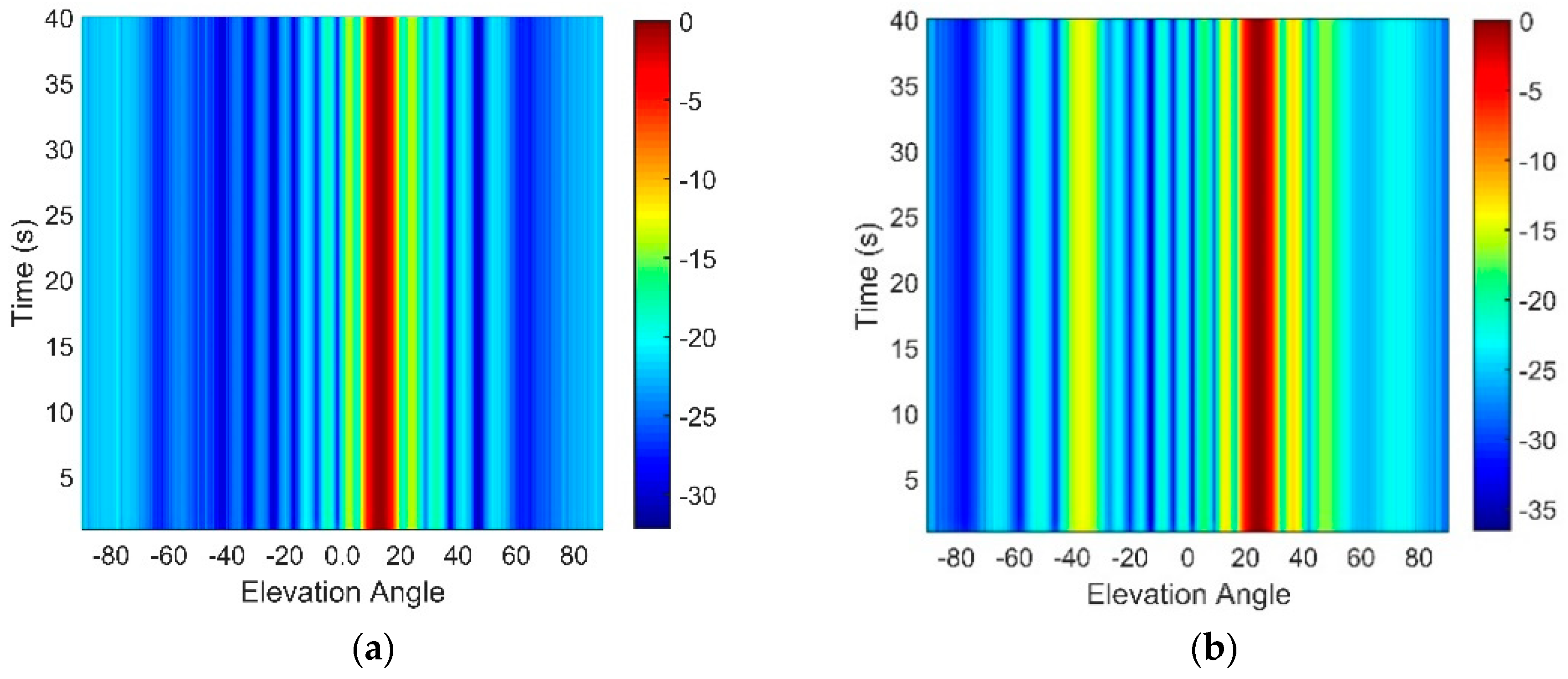
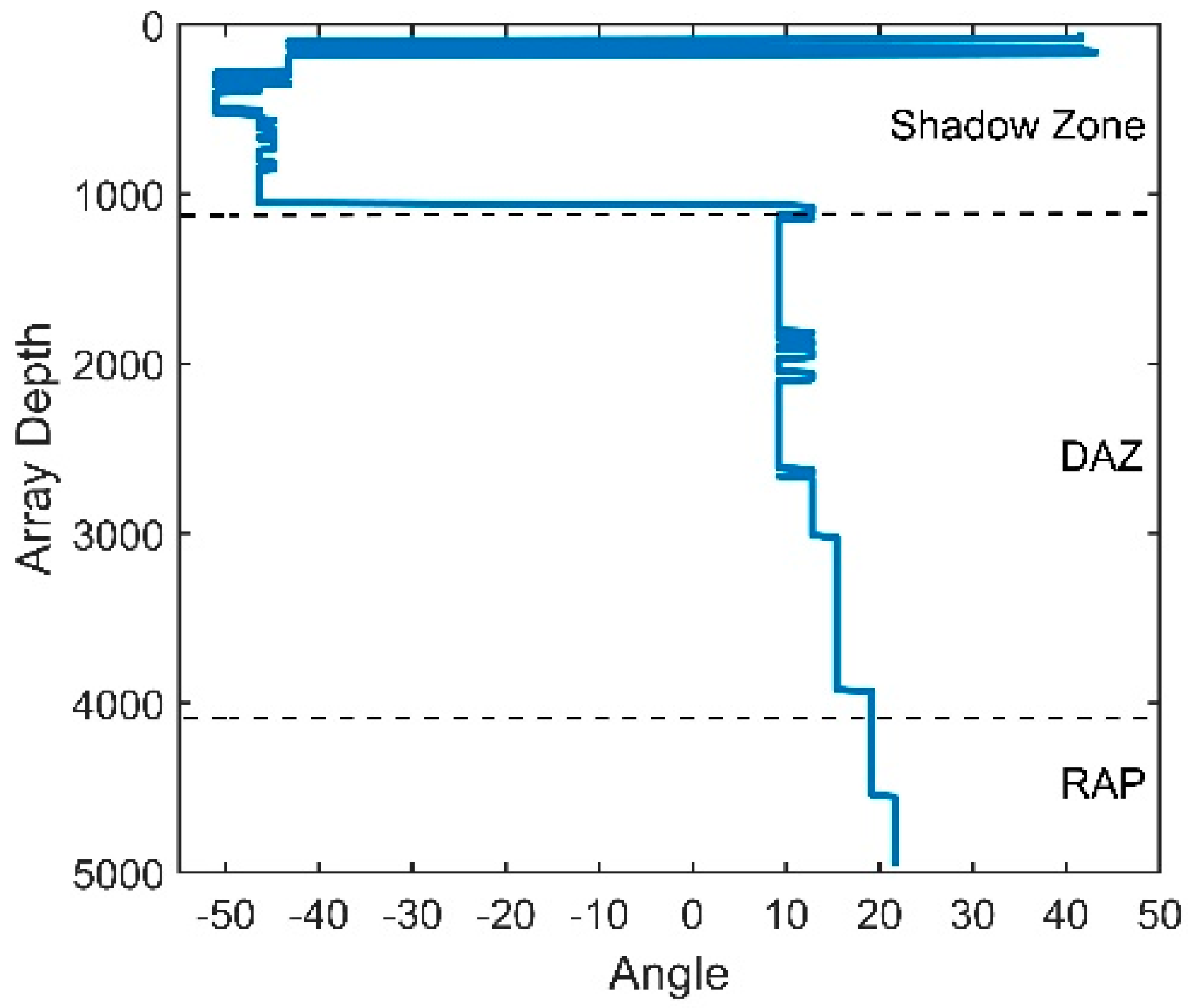
We define the arrival angles that correspond to the maximum angular response of the CBF as the vertical directionality of the acoustic signal. The 100 m-deep source is fixed in the range of 10 km, radiating a sweeping frequency signal with a center frequency of 150 Hz and a bandwidth of 50 Hz. The vertical array contains 16 elements with an equal spacing of 5 m, and the other parameters stay unchanged. The vertical directionality of the signals with different array depths is shown in
Figure 12. It can be seen that from the top of the DAZ to the base of the RAP, the elevation angles keep increasing and almost equal the arrival angle of D. As illustrated above, under this source range, the received signals in the DAZ and RAP are dominated by D and S1B0. The direction of the acoustic signal in the shadow zone varies almost without a law because of its unstable multipath arrivals.
4.3. Vertical Directionality and Correlation of the Noise
Ocean ambient noise is a type of acoustic background, which constantly exists in the ocean and is produced by a number of different types of noise sources. Wind-driven and distant shipping noise sources contribute to the total noise field in the DAZ and RAP of the deep ocean [
13]. In a real ocean, the ambient noise is not incoherent and anisotropic, and thus, both the directivity and the correlation are important for the NG.
The directional density function represents the noise power that is incident at a point receiver in the ocean as a function of the arrival angle. Assuming spherical-polar coordinates, the directional density function can be written as
, where
is the polar angle measured from the zenith, and
is the azimuthal angle. A convenient normalization, introduced by Cox [
9], equates the total noise power integrated over all angular space to
:
For the case of surface-generated noise, where the sources are distributed uniformly (statistically) across the sea surface, the directional density function is independent of the azimuth, in which case the normalization in Equation (29) reduces to:
where
represents the power directivity of the noise in the vertical direction, integrated over the azimuth.
Cox proposed that any homogeneous noise field could be characterized by the directional distribution of the noise power. His famous coherence function for vertical aligned sensors is:
where d stands for the separation between two hydrophones.
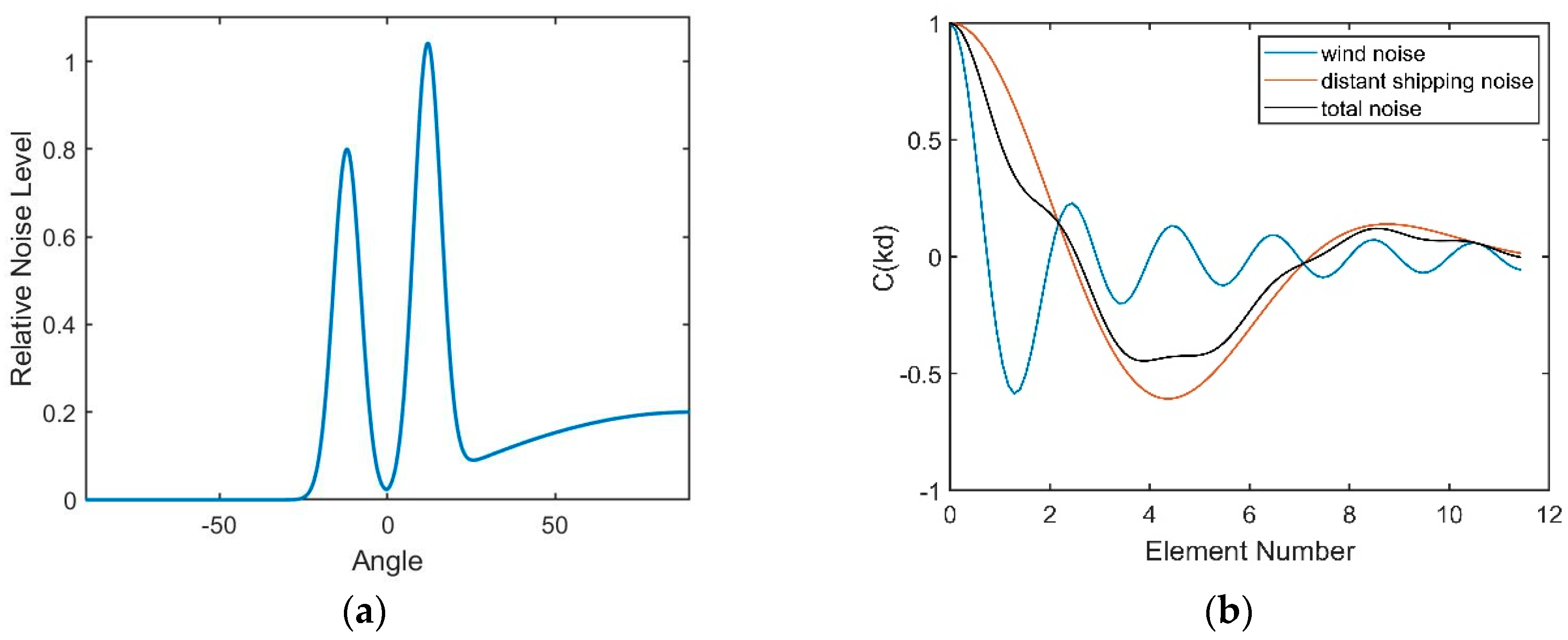
For the distant shipping noise, the dual peaks structure [
14], in which the peaks are approximately symmetrical with respect to the horizontal direction, can be observed in the vertical directionality pattern. This directionality result was induced by upward and downward acoustic rays from the DSC and along the DSC or convergence zone path, because acoustic rays can reverse at the surface conjugate depth. According to [
14], the directional density function of the distant shipping noise is developed on the basis of the Von Mises circular distribution:
To improve the intuitiveness, Equation (32) is shifted from the angle interval
to the interval
in this paper, and then, it will be rewritten as:
where
denotes the vertical endfire directions. The positive and negative angles represent the downward and upward acoustic rays arriving at the array, correspondingly.
This expression shows dual peak at the angles and . The real parameters and decide the height of the peaks, and they will be symmetrical with respect to the horizontal axis when . In general, the power is lower along the upward rays than along the downward rays in the noise directionality pattern, i.e., . This finding occurs mostly because the ocean acoustic channel was an incomplete channel with a lack of surface conjugate depth. The acoustic rays could not reverse completely but were reflected by the bottom with reflection losses. The parameter decides the peak’s width, and the width becomes narrower when increases.
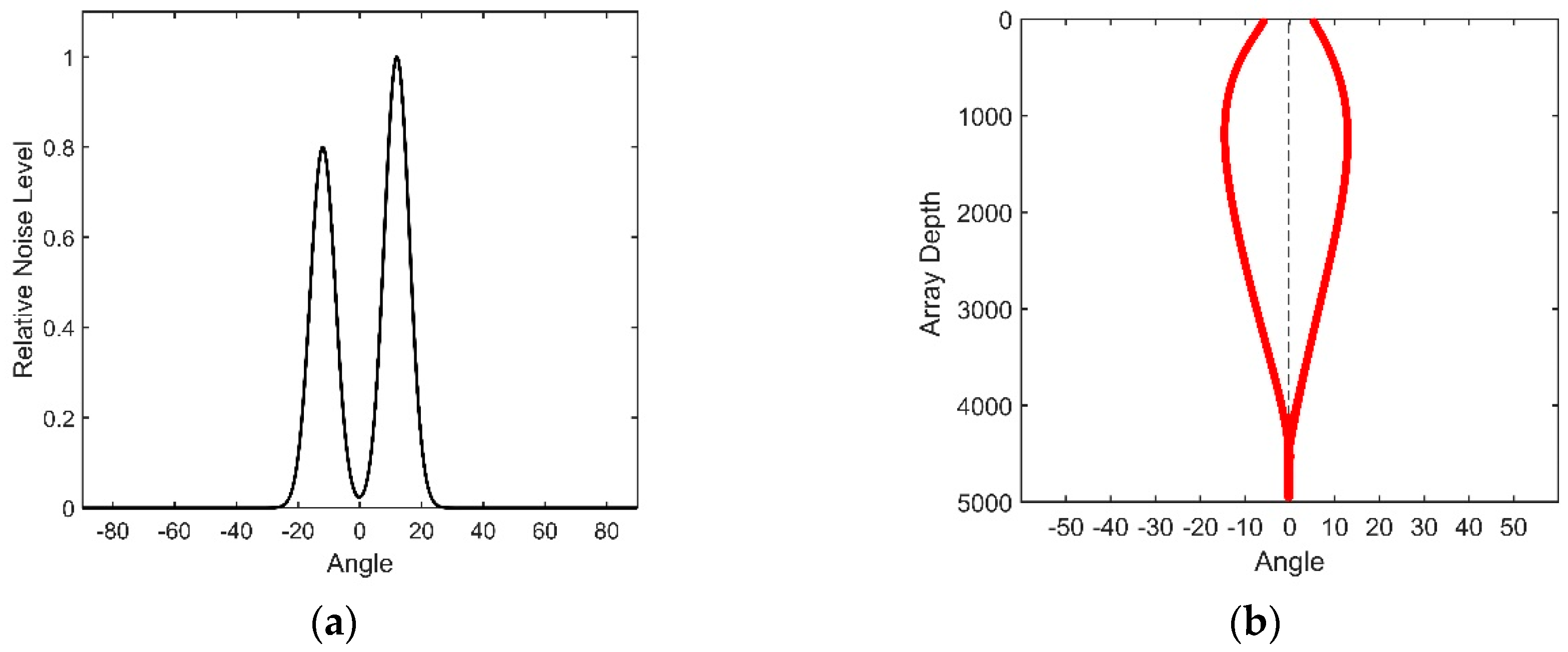
The directional density function specified by Equation (33) is plotted in
Figure 13. The value of
is set to 12°;
is set to 60, and
,
.
The directional density of the shipping noise versus the depth has been generated in [
14], as shown in
Figure 13b. This figure shows that the directional density depends on the depth. The black line in
Figure 13b means the horizontal direction. This type of dual-homed phenomenon can be explained by ray theory. Both of the upgoing and downgoing rays exist at the receiver’s station, and these two types of rays are symmetric about the horizontal. According to Snell’s law, acoustic rays bend to the depth where the sound has the lower speed. Therefore, the notch has the maximum width at the DSC depth. When reaching the surface conjugate depth, the rays start to reverse, and the angles of the rays versus the horizontal approach 0° gradually; thus, the notch disappears below the conjugate depth.
According to Cox’s theory, by substituting Equation (33) into Equation (31), the vertical coherence function takes the form of:
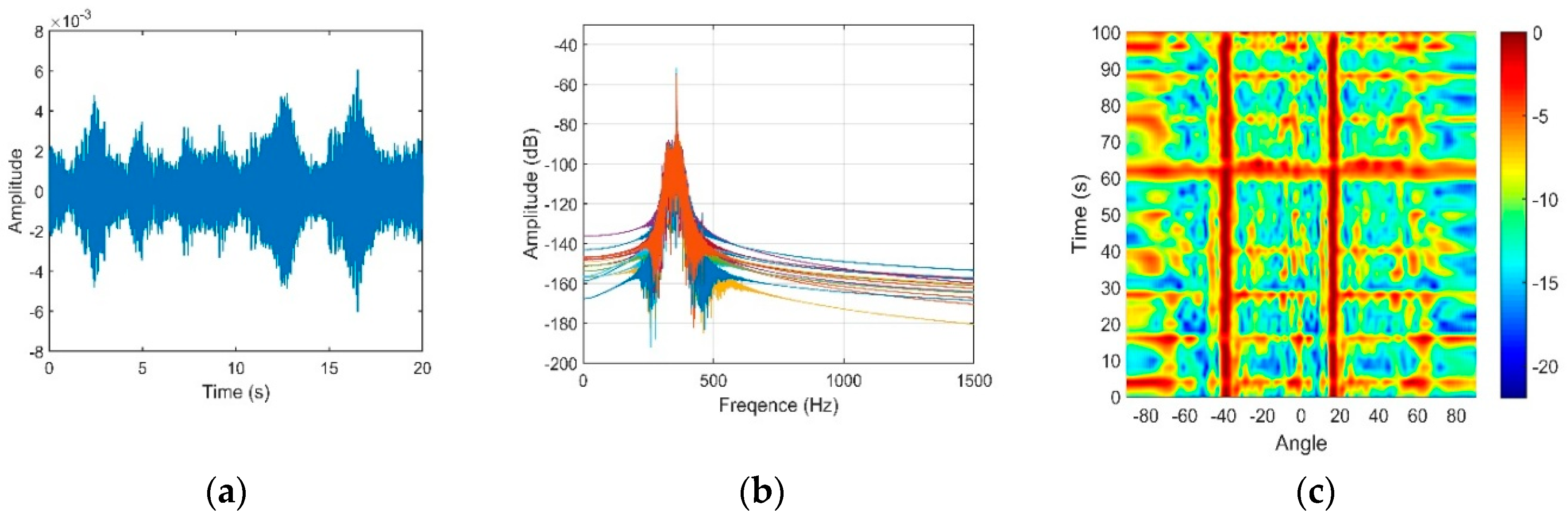
As illustrated above, positive and negative angles represent the downward and upward acoustic rays that arrive at the array, correspondingly. The vertical correlation coefficient of the distant shipping noise field at 350 Hz is presented in
Figure 14. It has been verified in [
14] that the experiment result matches quite well with this theoretical coherence.
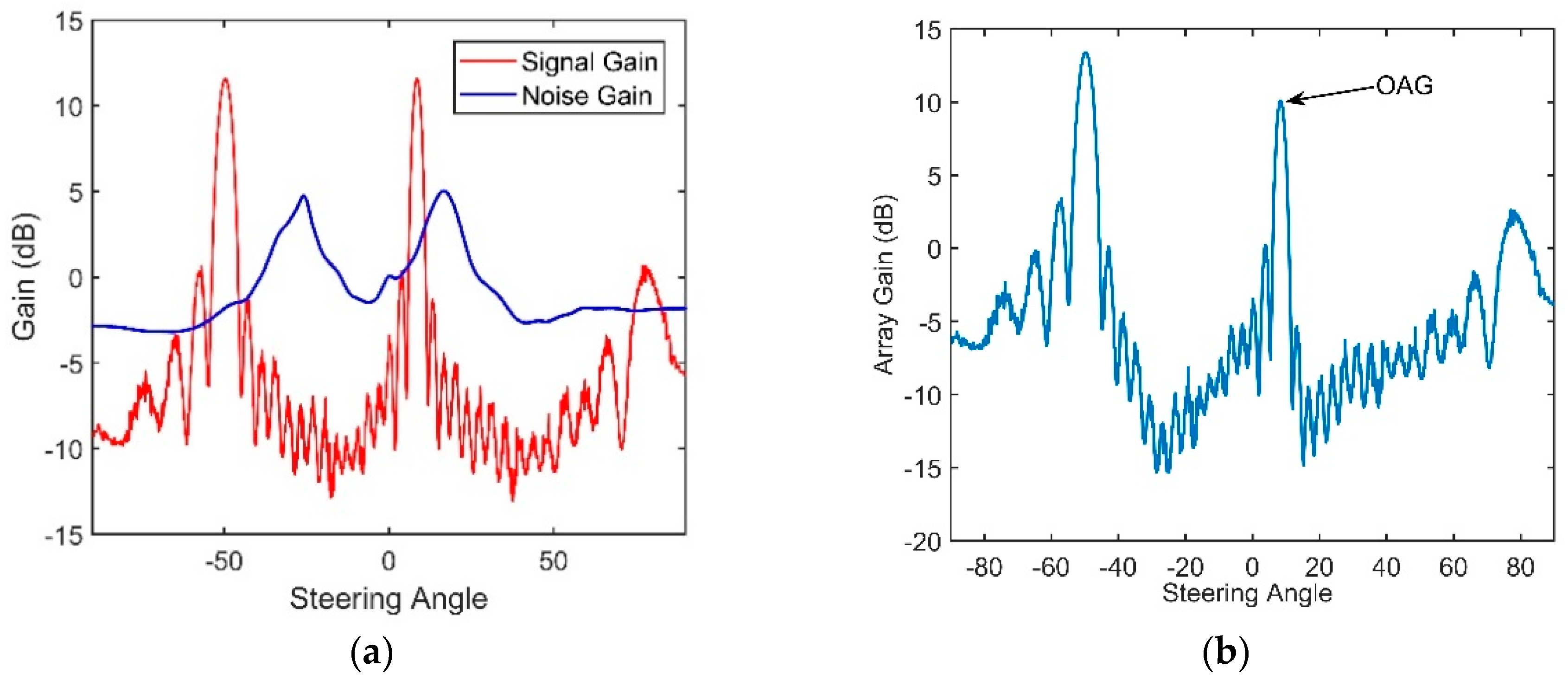
According to Equation (20), the NG is related to the sum of the correlation coefficients between the noise contributions of all pairs of hydrophones.
Figure 15a presents the sum versus various values of
. The decrease in
implies that the interval between the two peaks decreases. When
decreases to almost 0°, the noise will be incident on the vertical array from directions closer to the horizontal, which is the array’s natural steering angle. Seen from
Figure 15a, the coherence radius is farther from the origin when
decreases. This finding illustrates that the closer the steering angle of array is to the direction of the noise, the larger the coherence radius will be. Consequently, the correlation coefficients of all pairs of hydrophones will be higher, which ultimately causes a higher NG. The variation in the NG with
is presented in
Figure 15b. When
decreases to 0°, which is the natural steering angle of the array, the NG will reach 6.7 dB. In contrast, a negative NG, which could enhance the array gain, can be achieved when the array’s steering angle is far away from the direction of the noise. This finding shows that the NG will be positive if the steering angle of the CBF is within approximately ±10° of the noise direction.
According to [
13], the spatial correlation coefficients of the wind-driven noise field were approximately consistent with the results of the Cron/Sherman (C/S) model based on the surface noise source distribution. The first zero location occurred at a half wavelength for the wind-generated noise field and C/S coherence function. Hence, for most of the wind-driven noise fields in the ocean environment, the C/S model is a good simplification for computing and modeling.
Cron and Sherman proposed a model of deep ocean ambient noise in which independent point sources were distributed uniformly in a horizontal plane beneath the sea surface by considering the ocean itself to be a semi-infinite, homogeneous half space. They assumed straight line propagation in infinitely deep water. The noise sources radiate sound with an amplitude directional pattern given by
(where
m is a positive integer, usually taken as 1 or 2). Therefore, the vertically directional density function is:
When
m = 1, Equation (35) becomes:
This result is a typical result given by the C/S model, in which the vertically directional density function does not change with the depth. It is the maximum from the zenith, and the noise density from the horizontal and the angle interval become zero.
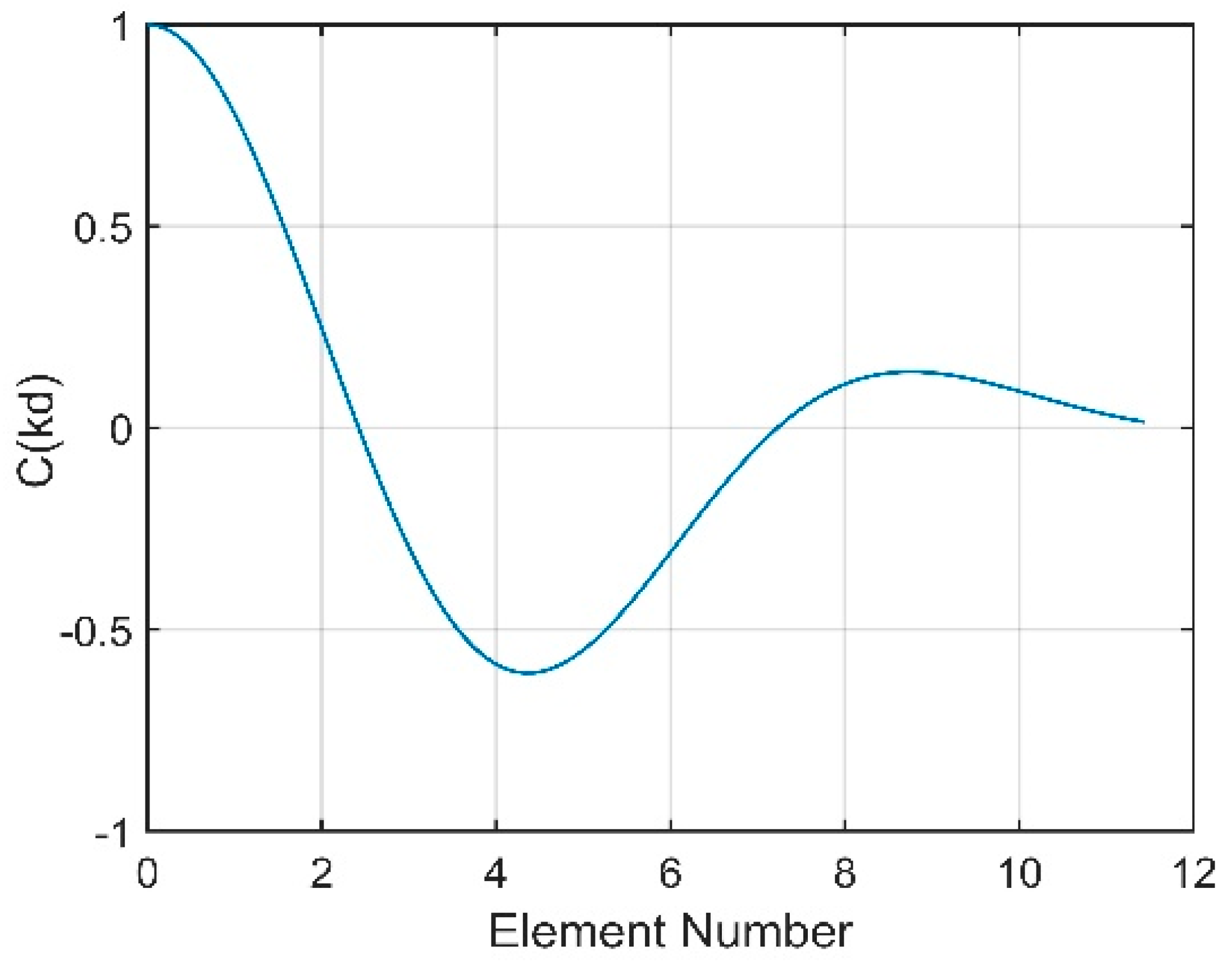
By substituting Equation (36) into Equation (31), the vertical coherence function of the C/S model takes the form of:
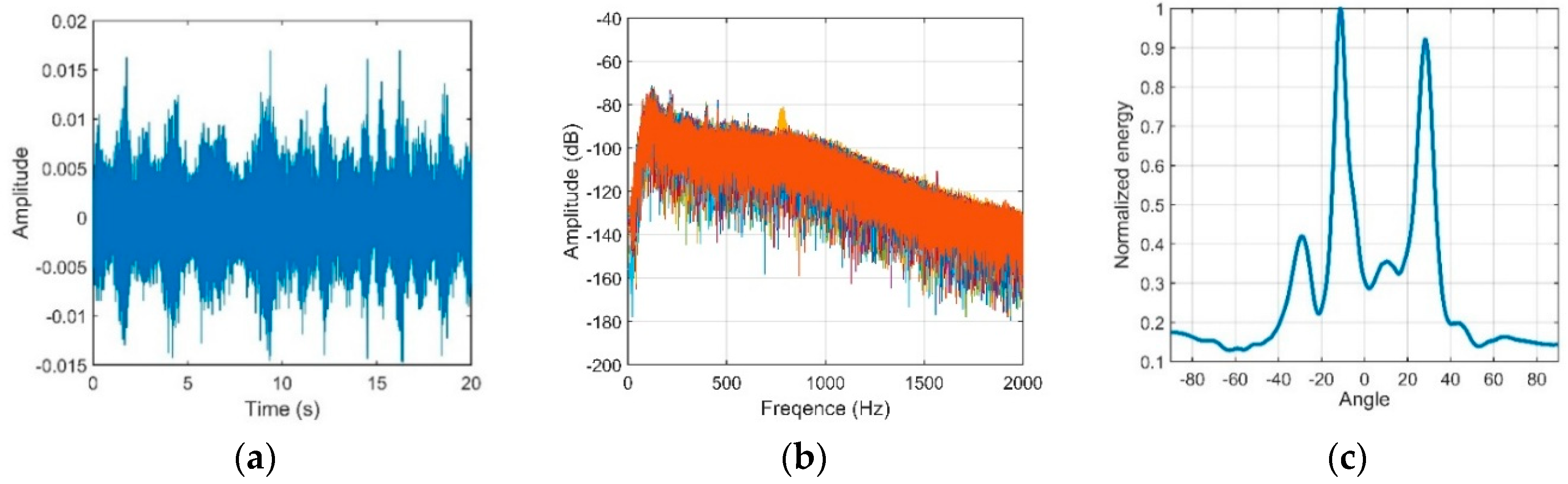
Therefore, the vertical directionality and correlation coefficient of the wind-driven noise field at 350 Hz are presented in
Figure 16.
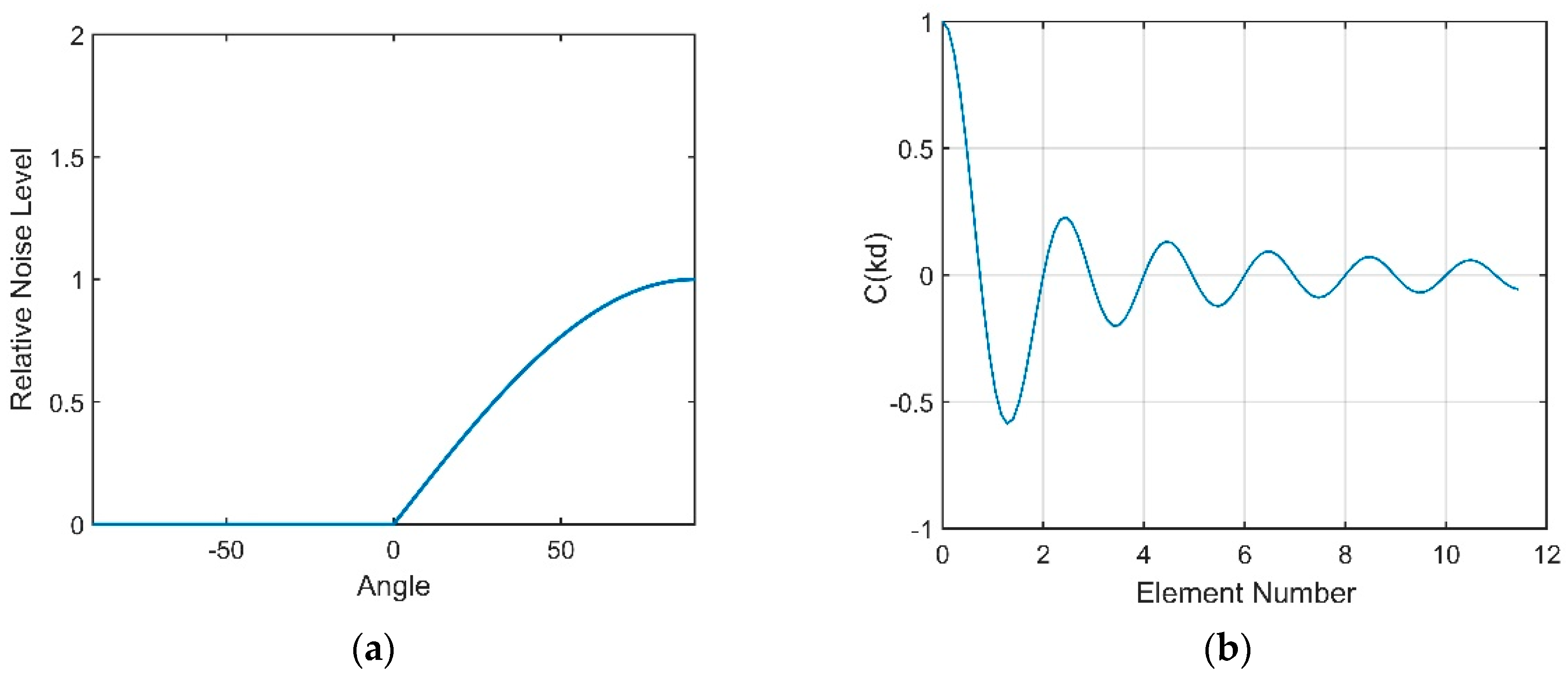
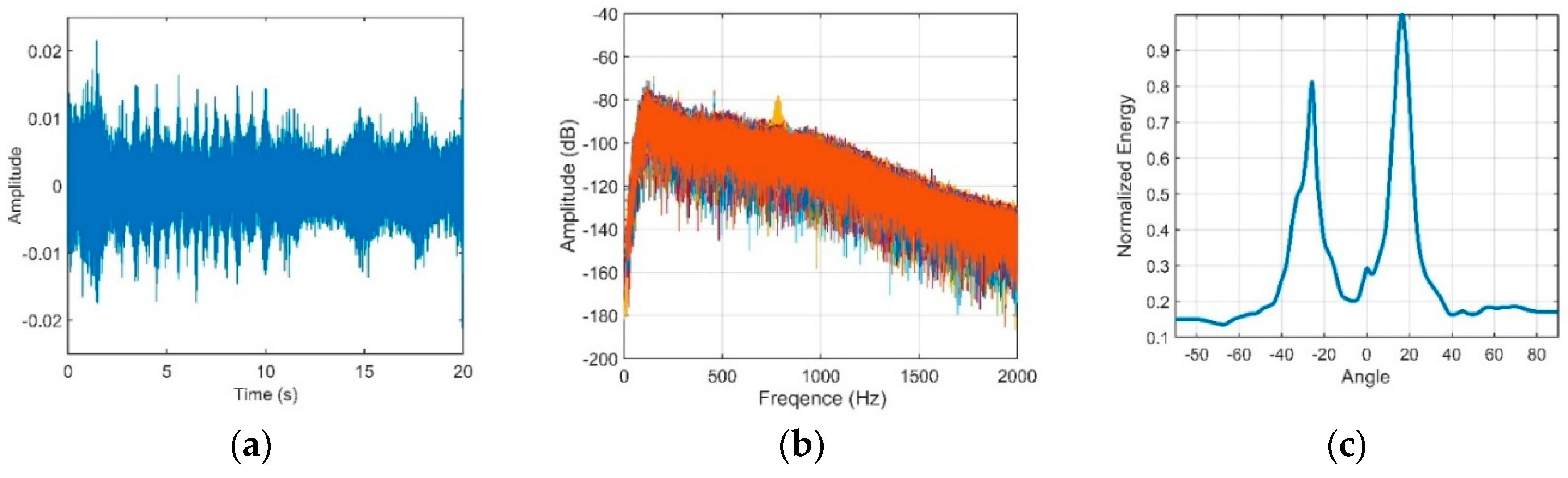
As demonstrated above, wind-driven and distant shipping noise sources contribute to the total noise field in the DAZ and RAP. This paper mainly considers the noise background at a wind speed of 3 m/s. The distant shipping noise reaching the vertical line array from a shallow grazing angle was the dominant noise source when the wind speed was 3 m/s. The vertical directionality and correlation coefficient of the total noise under this circumstance are presented in
Figure 17, and they show good agreement with the results of our experiment and the experiment in [
13]. In fact, the dual peaks structure can often be observed in the vertical directionality pattern of the noise as the presence of the DSC and bottom reflection.
We should note that by using CBF, the correlation between the signals of two elements have little to do with their spatial separation, while a smaller separation could lead to a higher correlation between the noise in the two signals. Therefore, the space between two neighboring elements should not be too small. According to the vertical correlation coefficient diagram of the frequency-depth in [
13], although the location of the first zeros depends to some extent on the frequency and wind speed, the correlation coefficients under any wind speed or frequency could achieve negative values when the separation between two hydrophones is larger than approximately 10 m. It could contribute to a negative NG and enhance the performance of the array.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}