Multi-Target Intense Human Motion Analysis and Detection Using Channel State Information †




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Intense human motion with multi-targets usually involves multiple moving objects compared with human daily activities. There are interactions between one object and other objects. For example, simple human motions such as walking, squatting, bending over, and so on, involve a single object. Furthermore, more complex human motions such as hugging and shaking hands, involve objects no more than two. The intense human motions being detected in this paper such as fighting, involve the interactions between more than two objects.
- Compared with human daily activity, the movement pattern of intense human motion is more complex, irregular and difficult to predict. The actions are usually disorderly and intense, and the movement speed is much higher.
- The intense human motions being detected in this paper refers to violence and fighting behavior, involving the interactions between two objects with high speed limbs movement such as hitting, kicking and falling.
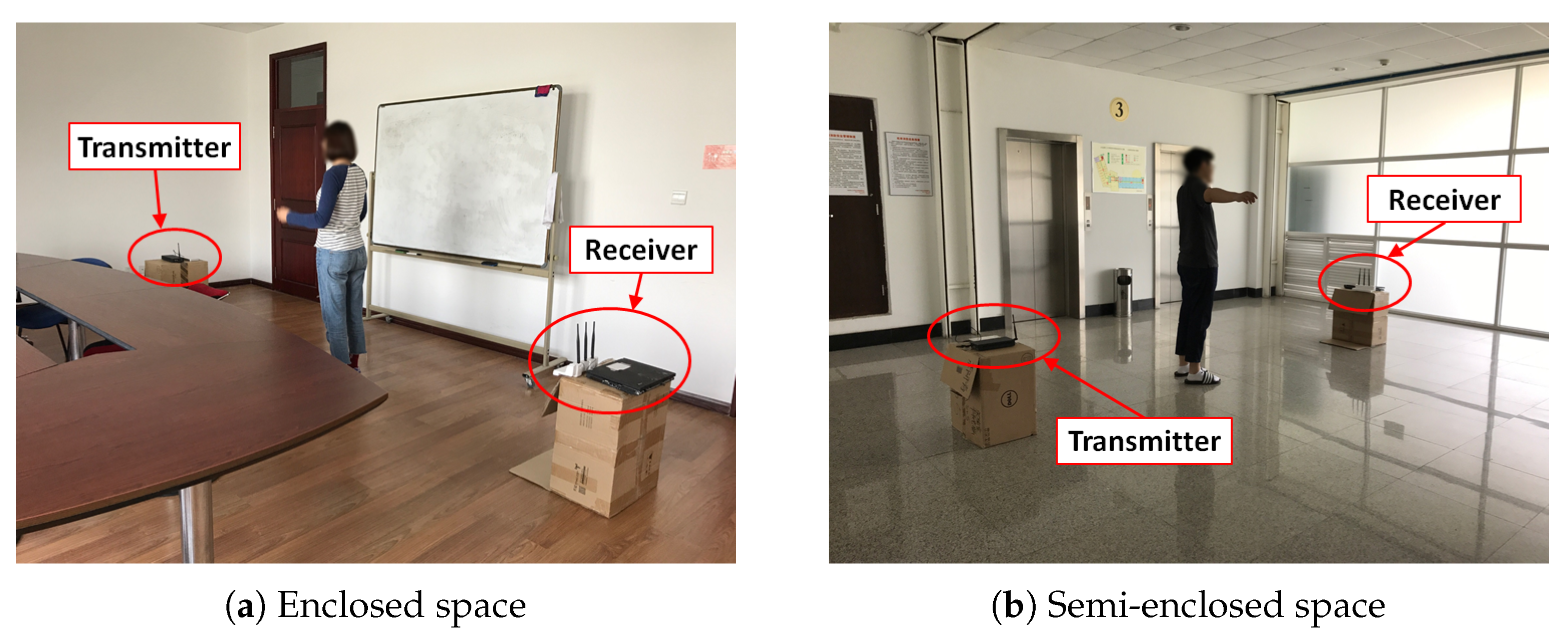
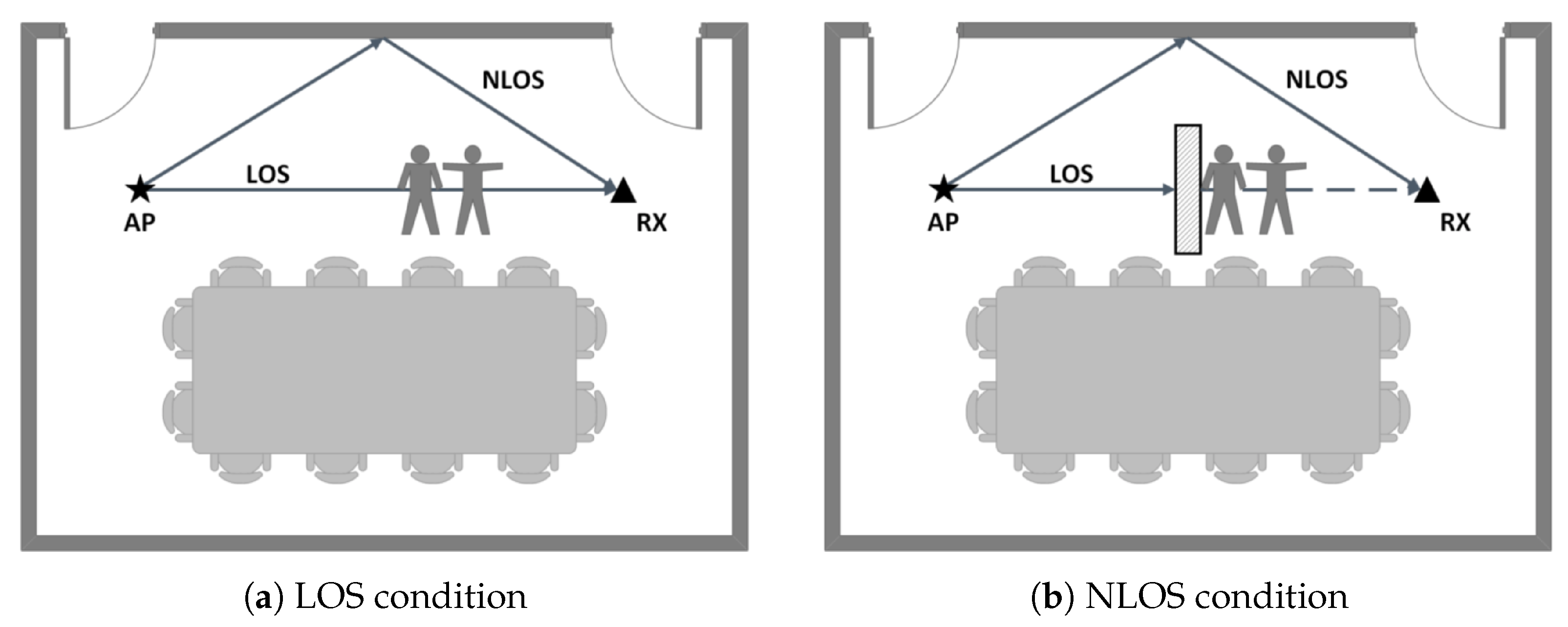
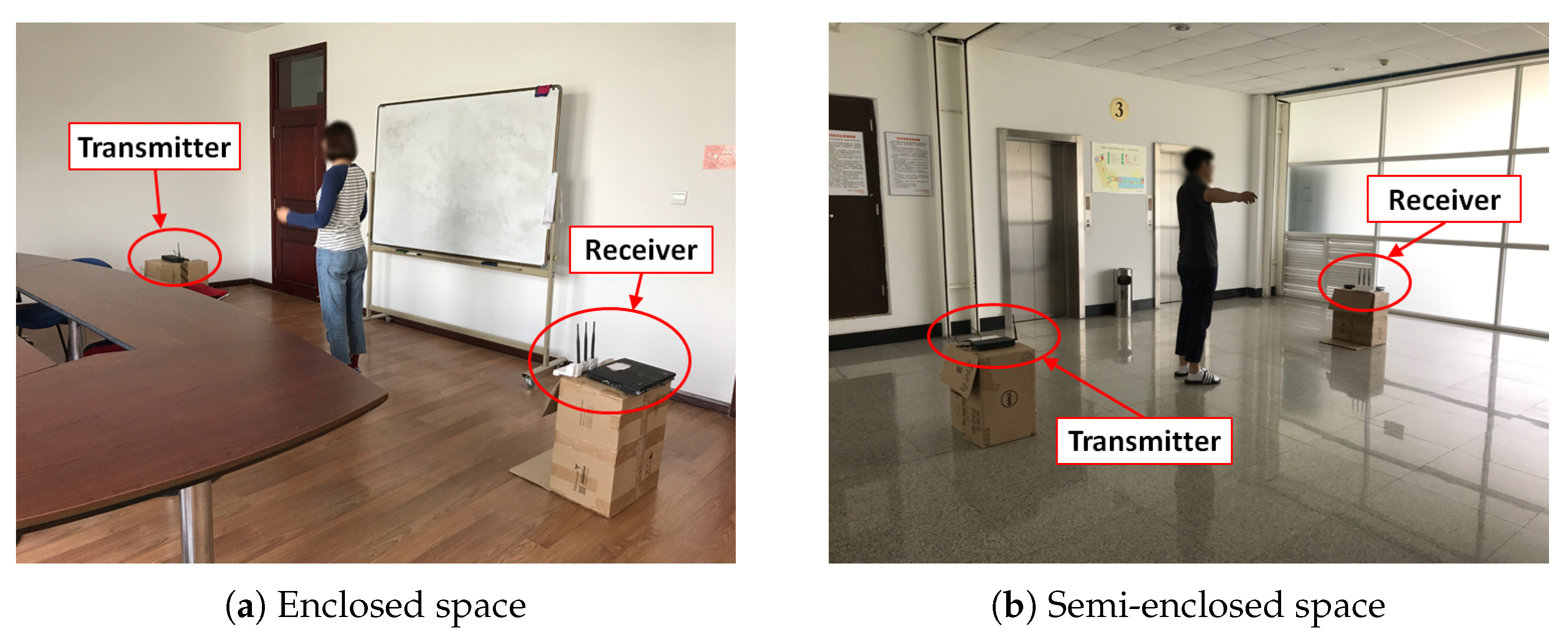
- The complex scenario refers to the case that obstacles exist between the transmitter and the receiver, and that is NLOS. These obstacles will have great influence on multi-path effect, and thus affect motion detection, and the influence to transmitted signals performs differently under LOS and NLOS conditions.
- We conducted extensive experiments, finding out the pattern of the relationship between human motion and CSI variation. Then, we extract the feature from CSI to depict different human motion, and use machine learning methods to detect intense human motion from human activities.
- For complex scenarios, that is, there are obstacles between the transmitter and the receiver, we analyzed the signal variation difference under LOS and NLOS conditions, and then we identify whether the current wireless link status.
- We designed a intense human motion detection system which can be deployed on the Wi-Fi APs (Access Points). The system can monitor people’s behavior indoor in real time. It will alarm once it detects intense human motion.
- Our system does not require extra devices or equipments, and can achieve intense human motion detection in complex scenarios relying solely on existing Wi-Fi access point. Moreover, it can be used in private places where video cameras cannot be deployed, which makes up for the deficiencies that camera-based method has.
2. Related Work
2.1. Camera-Based Human Motion Detection
2.2. Wi-Fi-Based Passive Human Detection
2.3. Wi-Fi-Based Activity Recognition
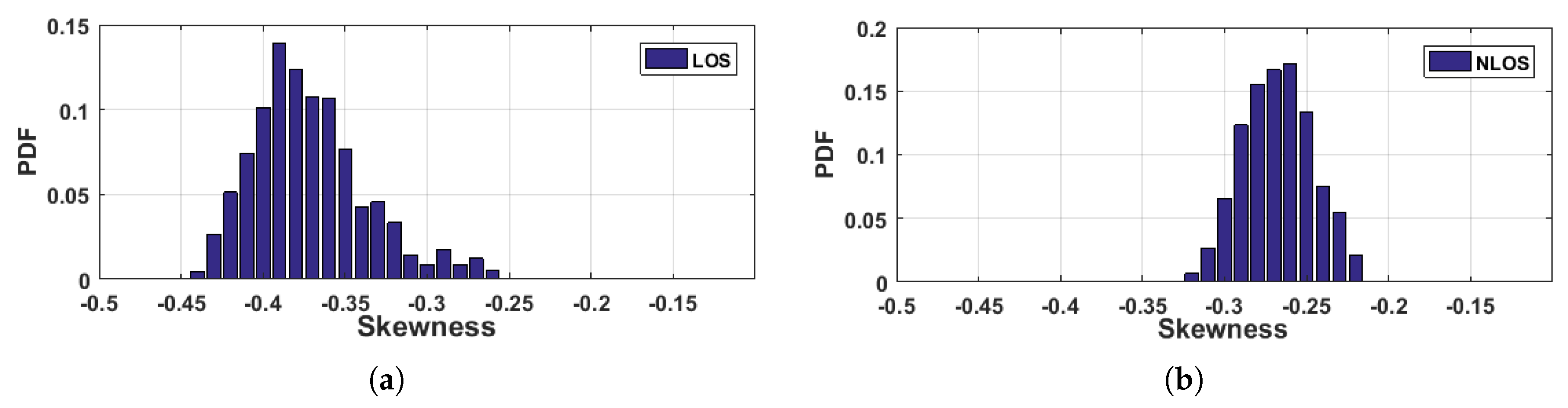
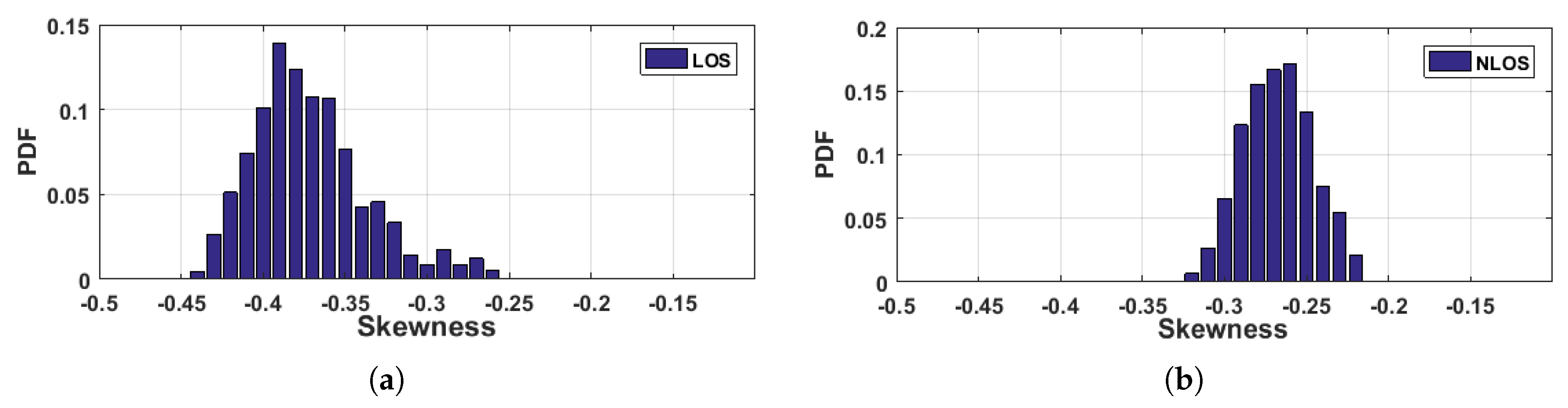
3. LOS/NLOS Identification
4. CSI-Based Human Motion Detection
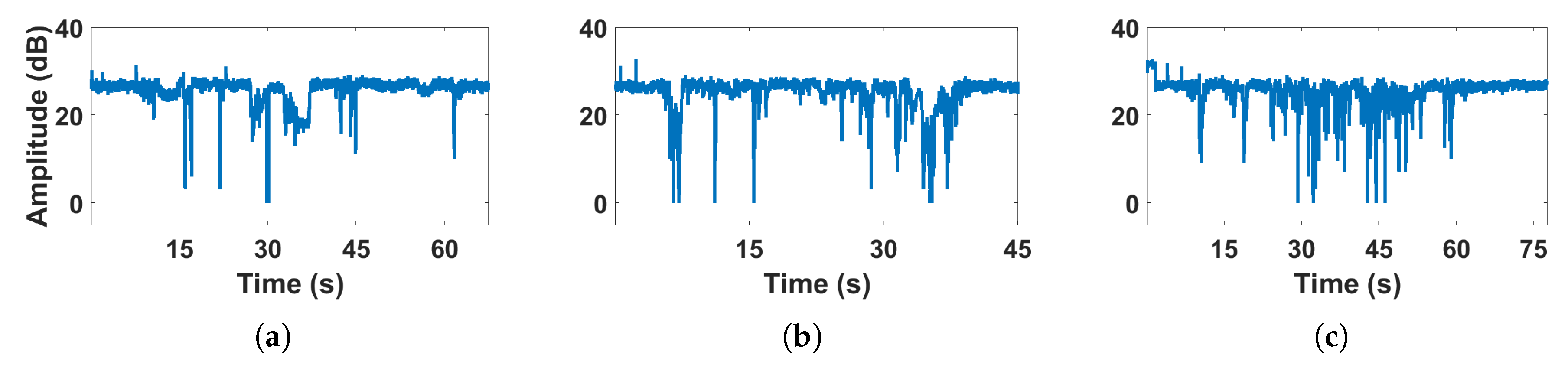
4.1. Human Motion and CSI Amplitude
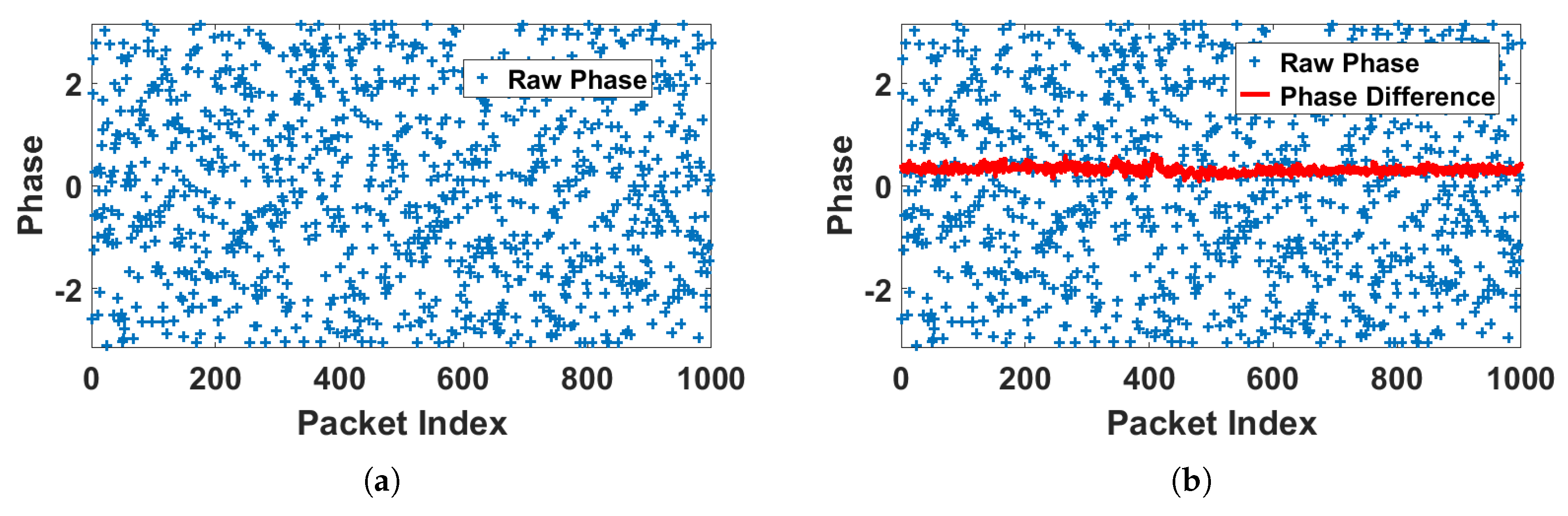
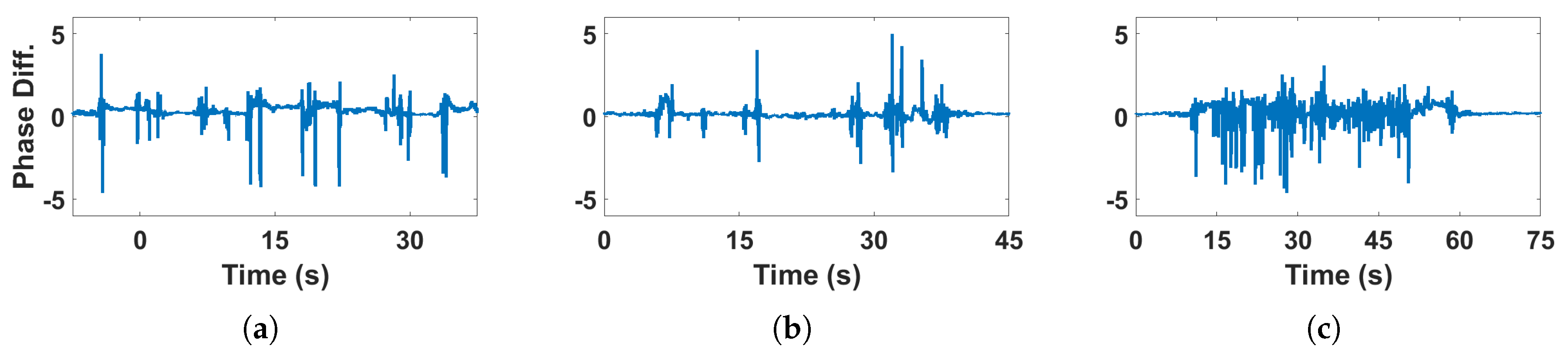
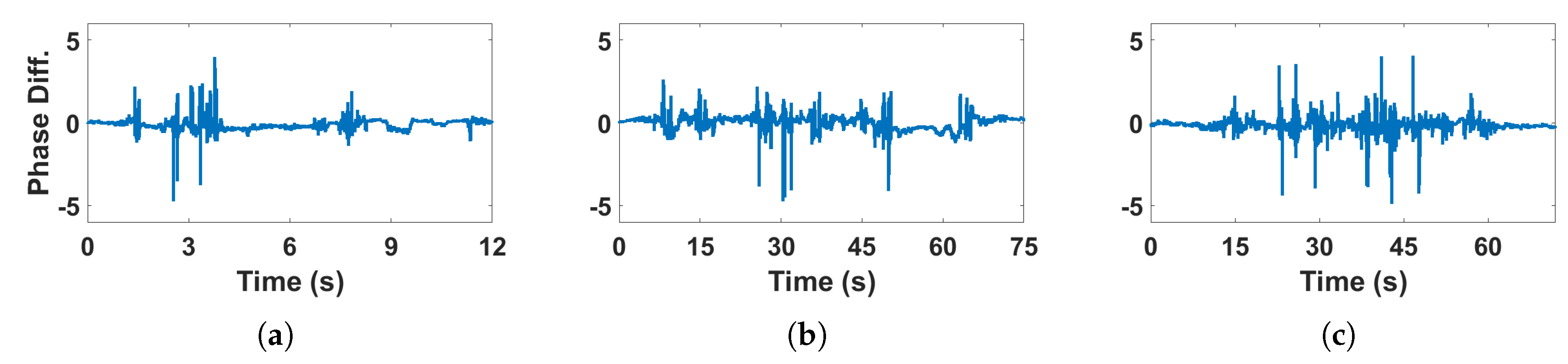
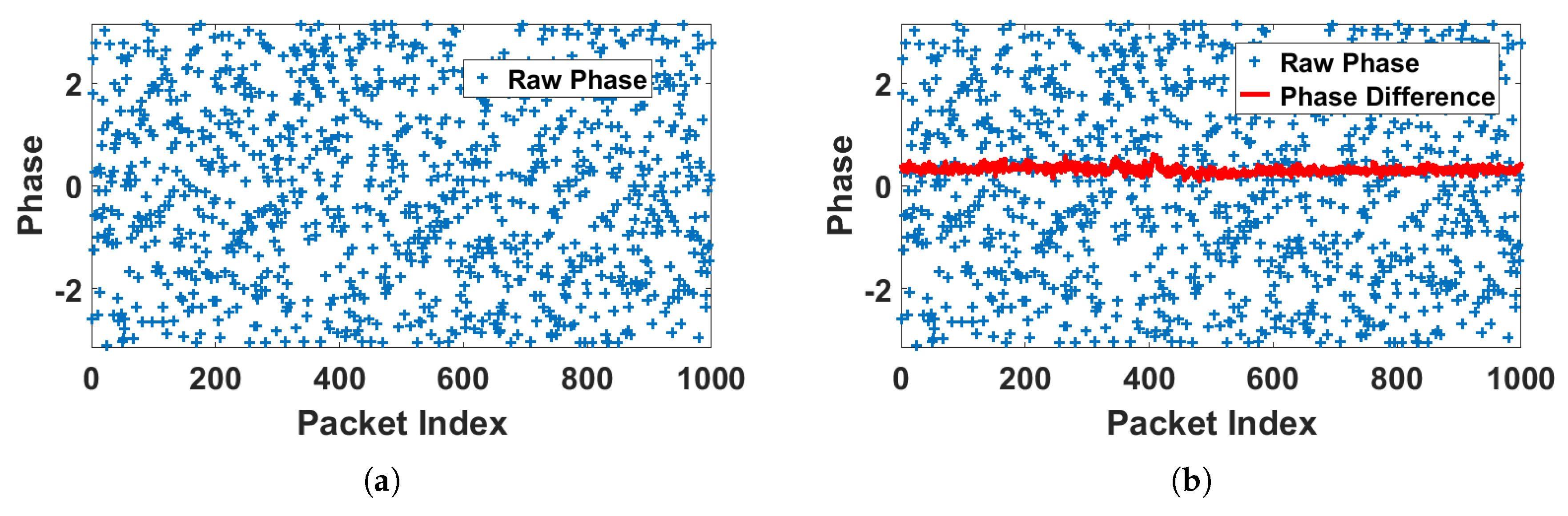
4.2. Human Motion and CSI Phase
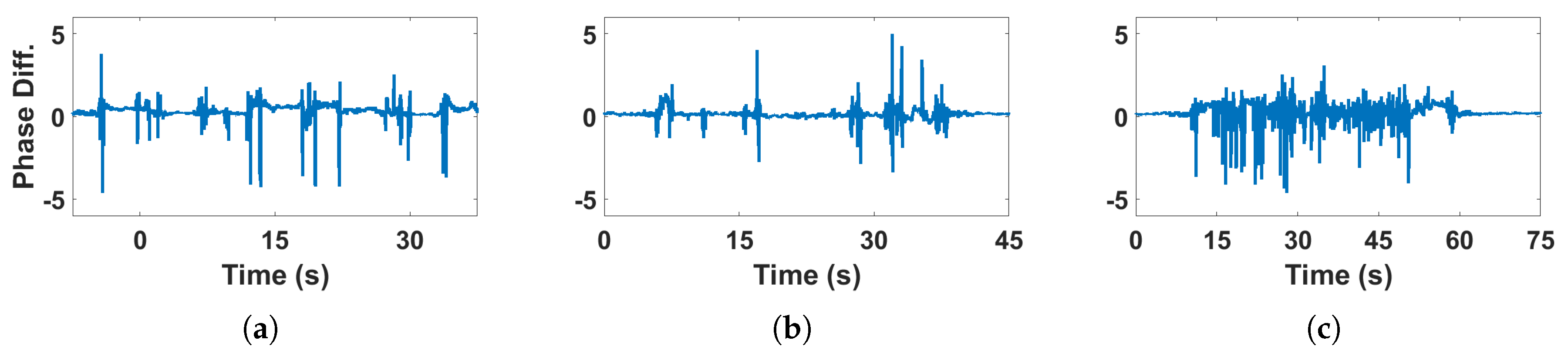
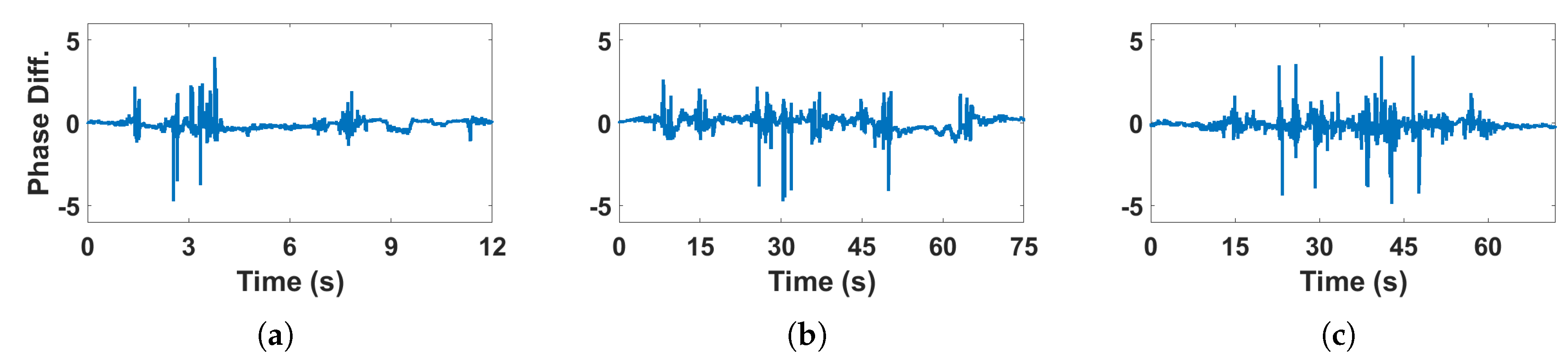
4.3. Human Motion in LOS and NLOS Conditions
4.4. Signal Preprocessing
4.5. Feature Extraction
4.6. OSVM Classifier
5. Evaluation
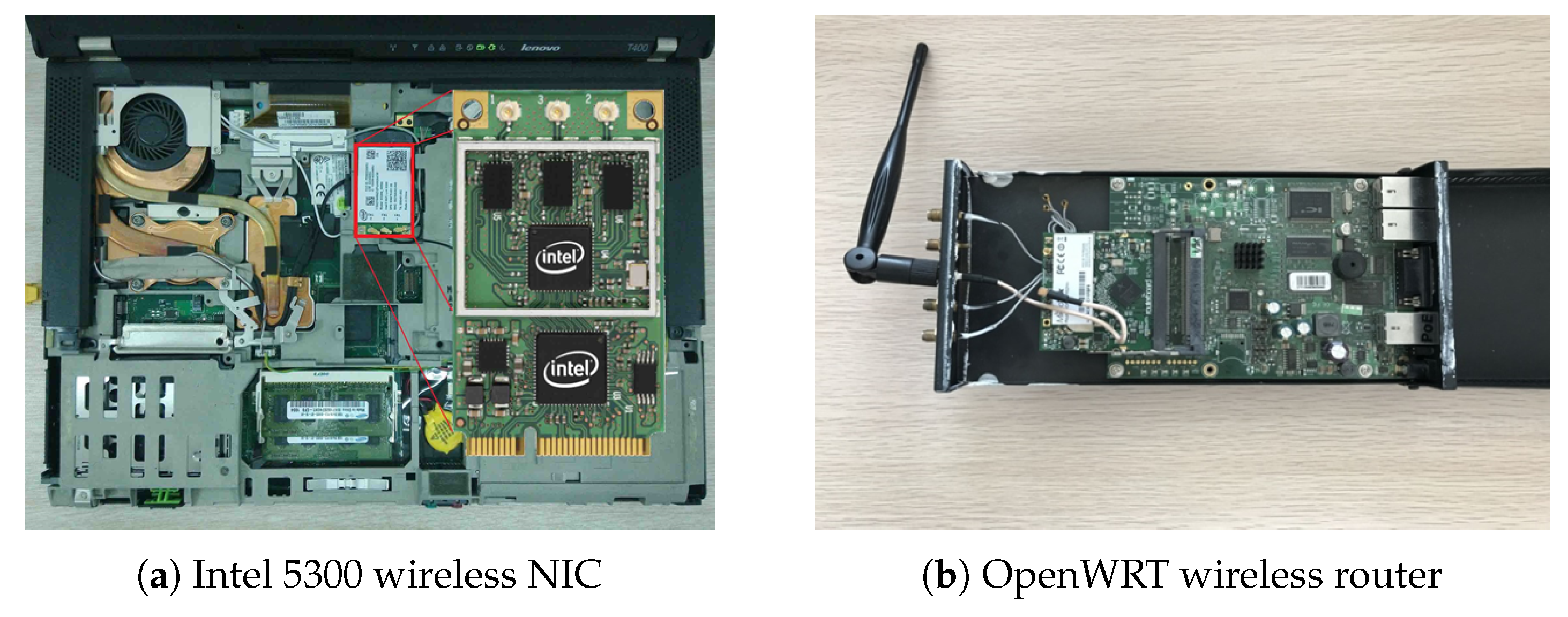
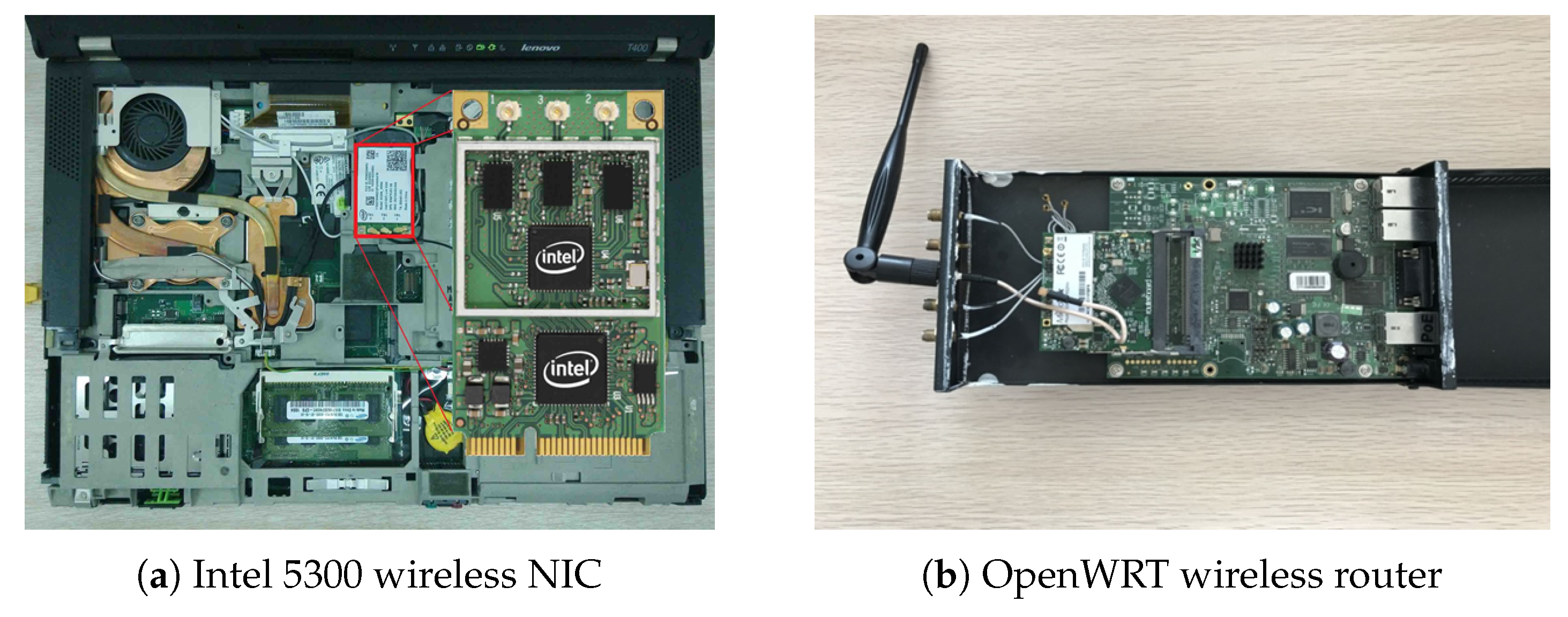
5.1. Experimental Setup
5.2. Performance
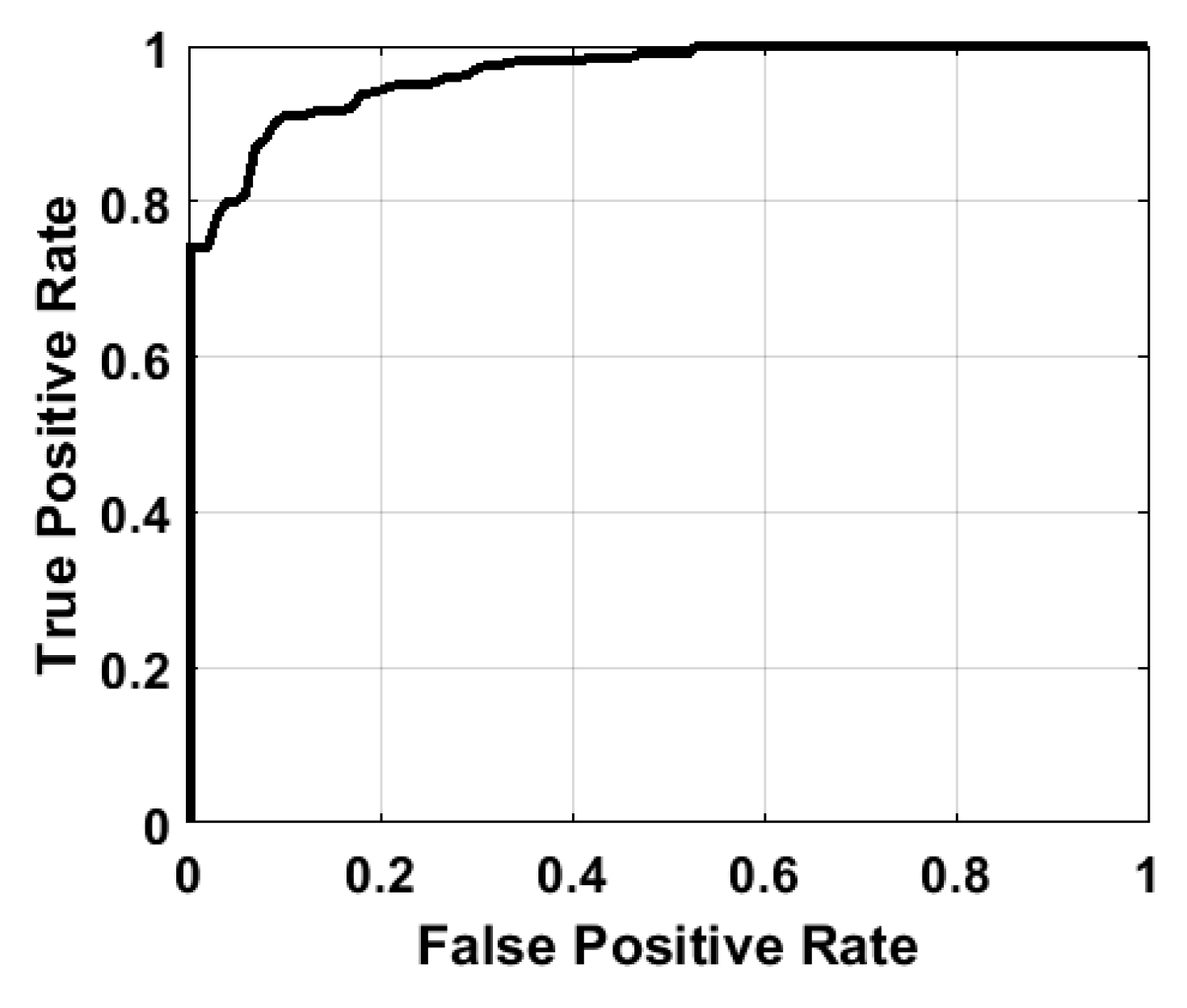
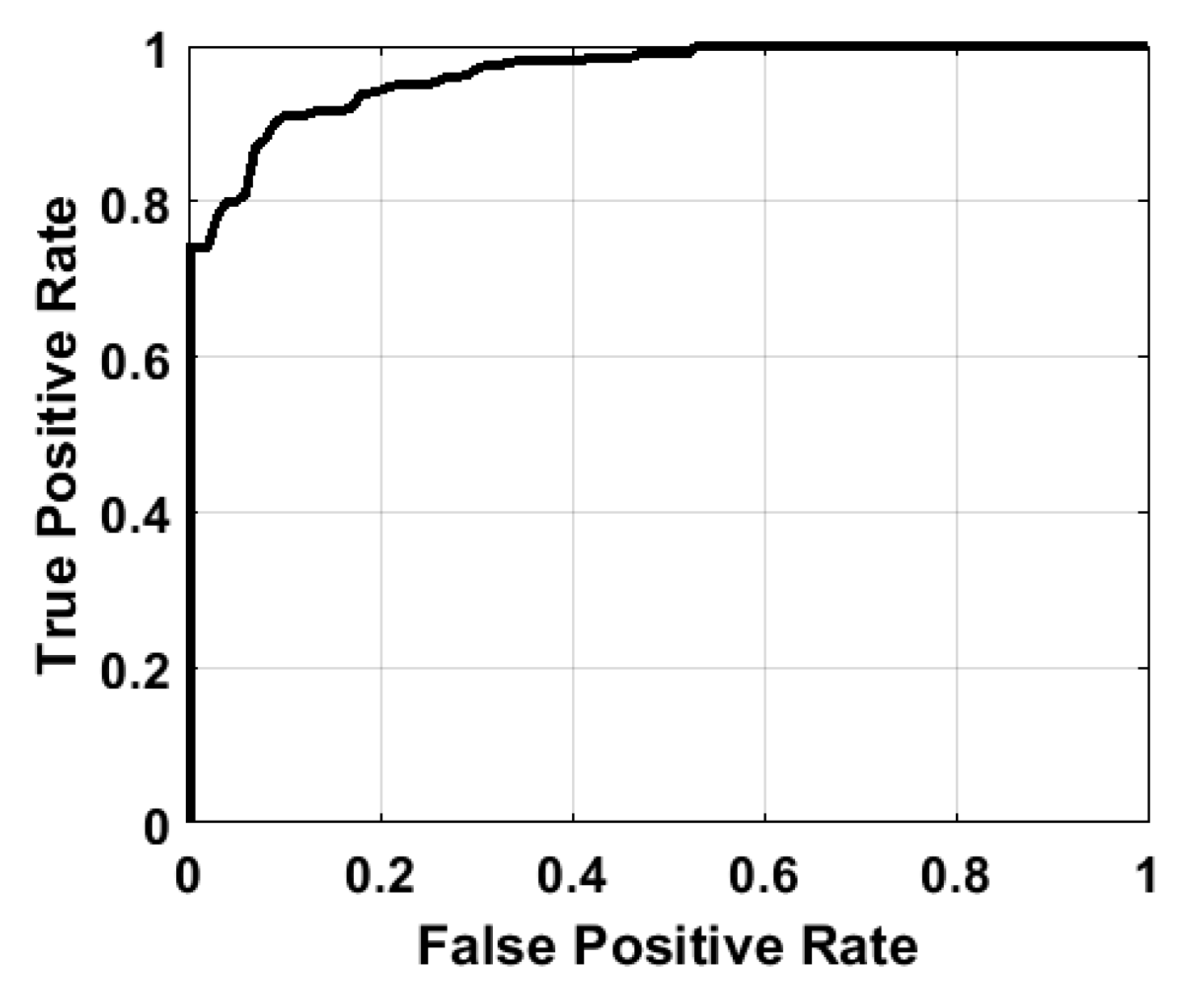
5.2.1. LOS/NLOS Identification
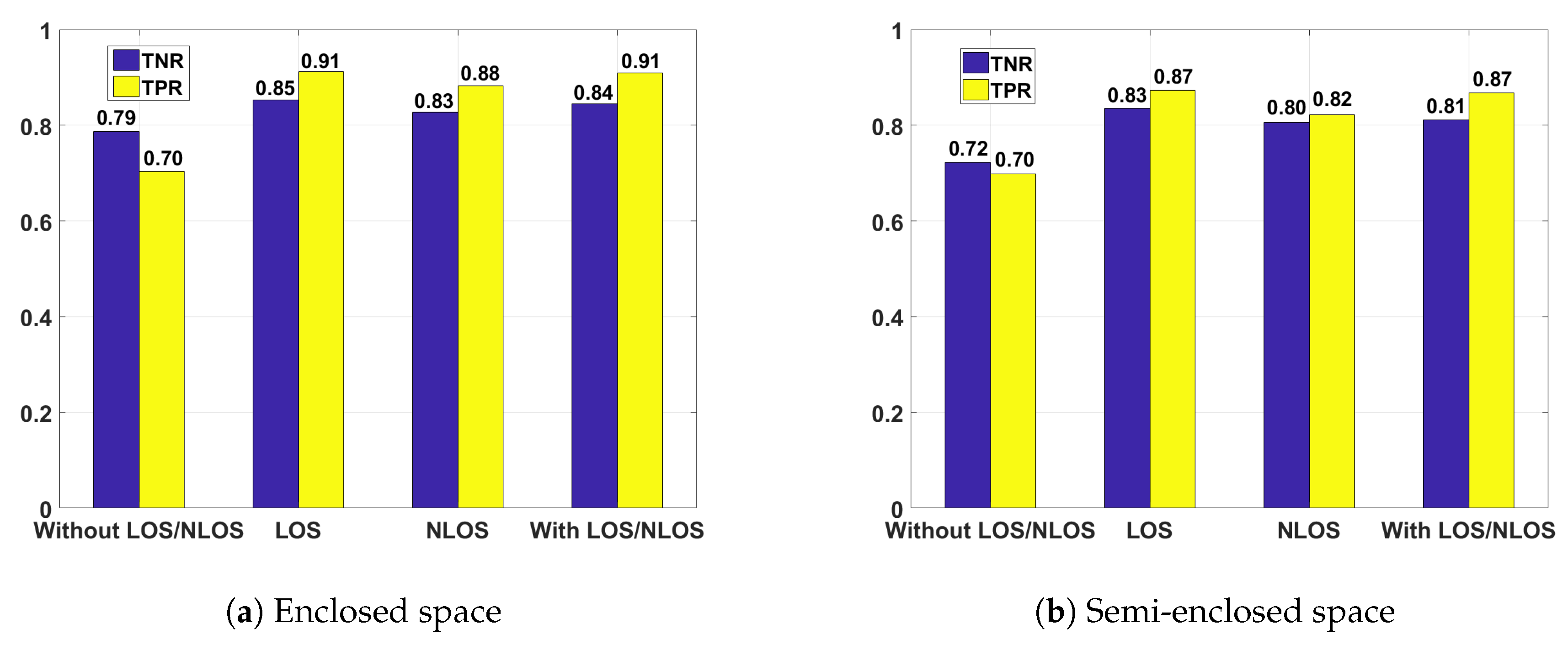
5.2.2. Human Motion Detection
- (1)
- Walking, sitting, making phone call, standing up, squatting, bending over of one volunteer between the transmitter and the receiver.
- (2)
- Walking, greeting, shaking hands, hugging of two volunteers between the transmitter and the receiver.
- (3)
- Intense motion such as kicking, fighting of two volunteers between the transmitter and the receiver.
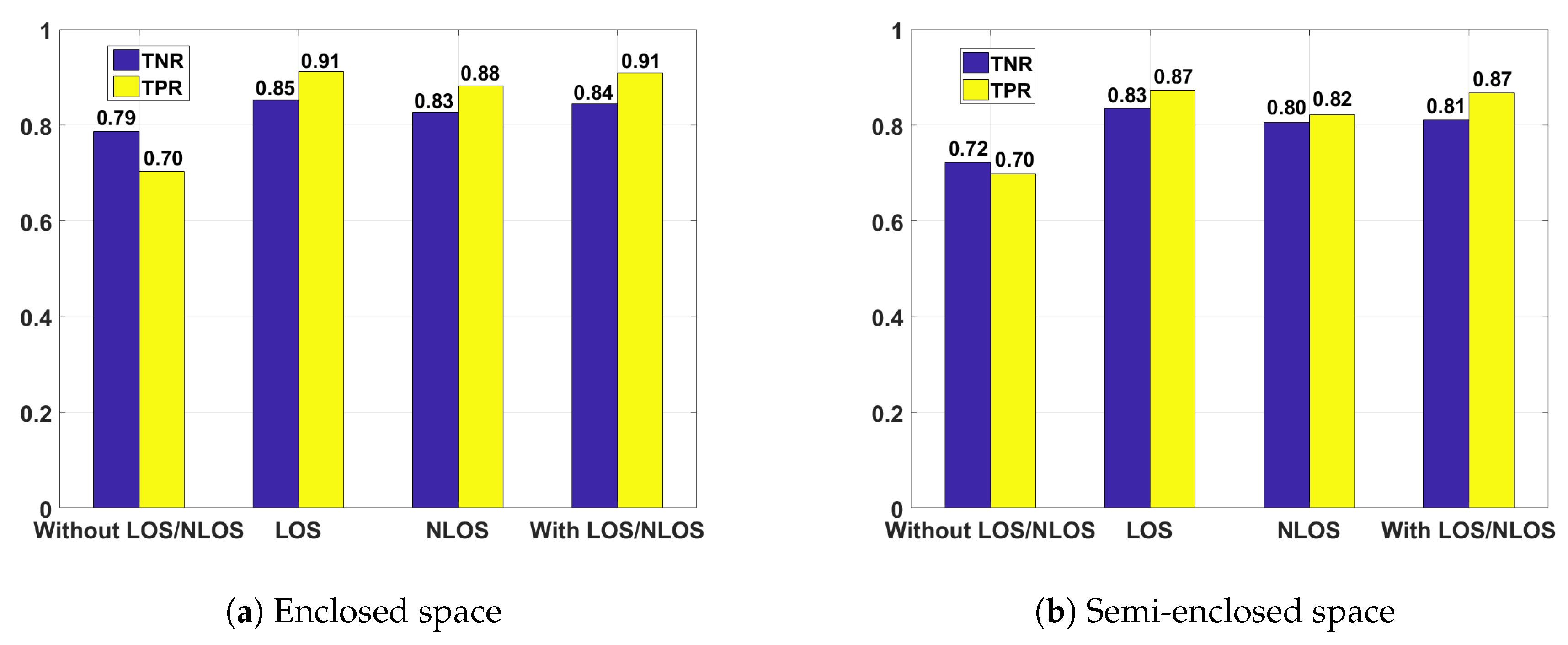
- All the samples are not tagged with LOS or NLOS. Making all the negative samples as input of OSVM, and randomly selecting positive and negative samples as test set.
- LOS: Making all the negative samples as input and randomly selecting positive and negative samples as test set in LOS.
- NLOS: Making all the negative samples as input and randomly selecting positive and negative samples as test set in NLOS.
- All the samples are tagged with LOS or NLOS. Making all the negative samples as input of OSVM, making all the negative samples in LOS as input and randomly selecting positive and negative samples as test set.
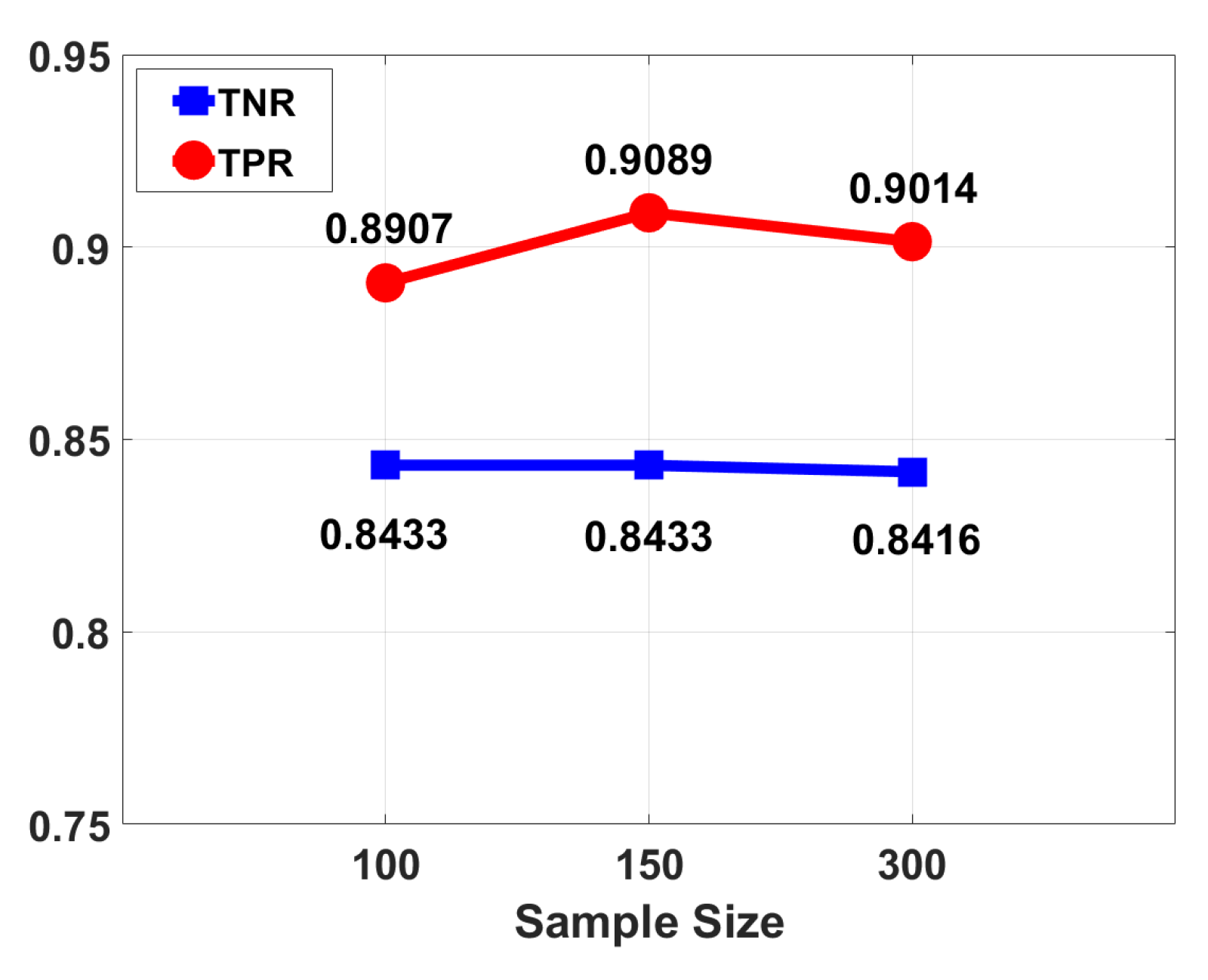
5.2.3. Performance Analysis
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, J.; Wang, L.; Guo, L.; Fang, J.; Lu, B.; Zhou, W. A Research on CSI-based Human Motion Detection in Complex Scenarios. In Proceedings of the 2017 IEEE 19th International Conference on e-Health Networking, Applications and Services (Healthcom), Dalian, China, 12–15 October 2017; pp. 1–6. [Google Scholar]
- Chan, A.B.; Liang, Z.S.J.; Vasconcelos, N. Privacy preserving crowd monitoring: Counting people without people models or tracking. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–7. [Google Scholar]
- Ren, Z.; Meng, J.; Yuan, J. Depth camera based hand gesture recognition and its applications in human-computer-interaction. In Proceedings of the 2011 8th International Conference on Information, Communications & Signal Processing, Singapore, 13–16 December 2011; pp. 1–5. [Google Scholar]
- Bodor, R.; Jackson, B.; Papanikolopoulos, N. Vision-based human tracking and activity recognition. In Proceedings of the 11th Mediterranean Conference on Control and Automation, Rhodes, Greece, 18–20 June 2003. [Google Scholar]
- Nievas, E.B.; Suarez, O.D.; García, G.B.; Sukthankar, R. Violence detection in video using computer vision techniques. In Proceedings of the International Conference on Computer Analysis of Images and Patterns, Seville, Spain, 29–31 August 2011; pp. 332–339. [Google Scholar]
- Youssef, M.; Mah, M.; Agrawala, A. Challenges: Device-free passive localization for wireless environments. In Proceedings of the 13th annual ACM international conference on Mobile computing and networking, Montreal, QC, Canada, 9–14 September 2007; pp. 222–229. [Google Scholar]
- Moussa, M.; Youssef, M. Smart devices for smart environments: Device-free passive detection in real environments. In Proceedings of the 2009 IEEE International Conference on Pervasive Computing and Communications, Galveston, TX, USA, 9–13 March 2009; pp. 1–6. [Google Scholar]
- Yang, J.; Ge, Y.; Xiong, H.; Chen, Y.; Liu, H. Performing Joint Learning for Passive Intrusion Detection in Pervasive Wireless Environments. In Proceedings of the IEEE INFOCOM 2010, San Diego, CA, USA, 14–19 March 2010; pp. 1–9. [Google Scholar]
- Zheng, X.; Yang, J.; Chen, Y.; Xiong, H. An Adaptive Framework Coping with Dynamic Target Speed for Device-Free Passive Localization. IEEE Trans. Mob. Comput. 2015, 14, 1138–1150. [Google Scholar] [CrossRef]
- Kaltiokallio, O.; Bocca, M. Real-Time Intrusion Detection and Tracking in Indoor Environment through Distributed RSSI Processing. In Proceedings of the IEEE 17th International Conference on Embedded and Real-Time Computing Systems and Applications, Toyama, Japan, 28–31 August 2011; pp. 61–70. [Google Scholar]
- Mrazovac, B.; Bjelica, M.Z.; Kukolj, D.; Vukosavljev, S.; Todorovic, B.M. System Design for Passive Human Detection Using Principal Components of the Signal Strength Space. In Proceedings of the IEEE 19th International Conference and Workshops on Engineering of Computer-Based Systems, Novi Sad, Serbia, 11–13 April 2012; pp. 164–172. [Google Scholar]
- Xu, C.; Firner, B.; Moore, R.S.; Zhang, Y.; Trappe, W.; Howard, R.; Zhang, F.; An, N. SCPL: Indoor device-free multi-subject counting and localization using radio signal strength. In Proceedings of the 12th International Conference on Information Processing in Sensor Networks, Philadelphia, PA, USA, 8–11 April 2013; pp. 79–90. [Google Scholar]
- Xi, W.; Zhao, J.; Li, X.Y.; Zhao, K. Electronic frog eye: Counting crowd using WiFi. In Proceedings of the IEEE INFOCOM 2014—IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; pp. 361–369. [Google Scholar]
- Depatla, S.; Mostofi, Y. Crowd Counting through Walls Using WiFi. arXiv 2017, arXiv:1711.05837. [Google Scholar]
- Depatla, S.; Mostofi, Y. Passive Crowd Speed Estimation and Head Counting Using WiFi. In Proceedings of the 15th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Hong Kong, China, 11–13 June 2018; pp. 1–9. [Google Scholar]
- Depatla, S.; Muralidharan, A.; Mostofi, Y. Occupancy estimation using only WiFi power measurements. IEEE J. Sel. Areas Commun. 2015, 33, 1381–1393. [Google Scholar] [CrossRef]
- Wu, F.J.; Solmaz, G. CrowdEstimator: Approximating Crowd Sizes with Multi-modal Data for Internet-of-Things Services. In Proceedings of the 16th Annual International Conference on Mobile Systems, Applications, and Services, Munich, Germany, 10–15 June 2018; pp. 337–349. [Google Scholar]
- Qian, K.; Wu, C.; Yang, Z.; Liu, Y.; Zhou, Z. PADS: Passive Detection of Moving Targets with Dynamic Speed using PHY Layer Information. In Proceedings of the 20th IEEE International Conference on Parallel and Distributed Systems (ICPADS), Hsinchu, Taiwan, 16–19 December 2014; pp. 1–8. [Google Scholar]
- Xie, Y.; Xiong, J.; Li, M.; Jamieson, K. xD-Track: Leveraging Multi-Dimensional Information for Passive Wi-Fi Tracking. In Proceedings of the 3rd Workshop on Hot Topics in Wireless, New York, NY, USA, 3–7 October 2016; pp. 39–43. [Google Scholar]
- Shen, S.; Gowda, M.; Choudhury, R.R. Closing the Gaps in Inertial Motion Tracking. In Proceedings of the 24th Annual International Conference on Mobile Computing and Networking, New Delhi, India, 29 October–2 November 2018. [Google Scholar]
- Qian, K.; Wu, C.; Yang, Z.; Liu, Y.; Jamieson, K. Widar: Decimeter-Level Passive Tracking via Velocity Monitoring with Commodity Wi-Fi. In Proceedings of the 18th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Chennai, India, 10–14 July 2017; p. 6. [Google Scholar]
- Qian, K.; Wu, C.; Zhang, Y.; Zhang, G.; Yang, Z.; Liu, Y. Widar2.0: Passive Human Tracking with a Single Wi-Fi Link. In Proceedings of the 16th ACM International Conference on Mobile Systems, Applicationjs, and Services, Munich, Germany, 10–15 June 2018. [Google Scholar]
- Li, X.; Zhang, D.; Lv, Q.; Xiong, J.; Li, S.; Zhang, Y.; Mei, H. IndoTrack: Device-Free Indoor Human Tracking with Commodity Wi-Fi. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2017, 1, 72. [Google Scholar] [CrossRef]
- Liu, X.; Cao, J.; Tang, S.; Wen, J. Wi-Sleep: Contactless Sleep Monitoring via WiFi Signals. In Proceedings of the IEEE Real-Time Systems Symposium, Rome, Italy, 2–5 December 2014; pp. 346–355. [Google Scholar]
- Liu, J.; Wang, Y.; Chen, Y.; Yang, J.; Chen, X.; Cheng, J. Tracking Vital Signs During Sleep Leveraging Off-the-shelf WiFi. In Proceedings of the 16th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Hangzhou, China, 22–25 June 2015; pp. 267–276. [Google Scholar]
- Wu, C.; Yang, Z.; Zhou, Z.; Liu, X. Non-Invasive Detection of Moving and Stationary Human with WiFi. IEEE J. Sel. Areas Commun. 2015, 33, 2329–2342. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, D.; Ma, J.; Wang, Y.; Wang, Y.; Wu, D.; Gu, T.; Xie, B. Human respiration detection with commodity wifi devices: Do user location and body orientation matter? In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Heidelberg, Germany, 12–16 September 2016; 25–36; pp. 25–36. [Google Scholar]
- Zhang, F.; Zhang, D.; Xiong, J.; Wang, H.; Niu, K.; Jin, B.; Wang, Y. From Fresnel Diffraction Model to Fine-grained Human Respiration Sensing with Commodity Wi-Fi Devices. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 2, 53. [Google Scholar] [CrossRef]
- Yue, S.; He, H.; Wang, H.; Rahul, H.; Katabi, D. Extracting Multi-Person Respiration from Entangled RF Signals. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 2, 86. [Google Scholar] [CrossRef]
- Yang, Z.; Zhou, Z.; Liu, Y. From RSSI to CSI: Indoor localization via channel response. ACM Comput. Surv. 2013, 46, 25. [Google Scholar] [CrossRef]
- Wu, K.; Xiao, J.; Yi, Y.; Chen, D.; Luo, X.; Ni, L.M. CSI-based indoor localization. IEEE Trans. Parallel Distrib. Syst. 2013, 24, 1300–1309. [Google Scholar] [CrossRef]
- Mariakakis, A.T.; Sen, S.; Lee, J.; Kim, K.H. Sail: Single access point-based indoor localization. In Proceedings of the 12th Annual International Conference on Mobile Systems, Applications, and Services, Bretton Woods, NH, USA, 16–19 June 2014; pp. 315–328. [Google Scholar]
- Kotaru, M.; Joshi, K.; Bharadia, D.; Katti, S. SpotFi: Decimeter Level Localization Using WiFi. In Proceedings of the 2015 ACM Conference on Special Interest Group on Data Communication, London, UK, 17–21 August 2015; pp. 269–282. [Google Scholar]
- Vasisht, D.; Kumar, S.; Katabi, D. Decimeter-level localization with a single WiFi access point. In Proceedings of the 13th USENIX Symposium on Networked Systems Design and Implementation, Santa Clara, CA, USA, 16–18 March 2016; pp. 165–178. [Google Scholar]
- Wu, C.; Xu, J.; Yang, Z.; Lane, N.D.; Yin, Z. Gain without pain: Accurate WiFi-based localization using fingerprint spatial gradient. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2017, 1, 29. [Google Scholar] [CrossRef]
- Soltanaghaei, E.; Kalyanaraman, A.; Whitehouse, K. Multipath Triangulation: Decimeter-level WiFi Localization and Orientation with a Single Unaided Receiver. In Proceedings of the 16th Annual International Conference on Mobile Systems, Applications, and Services, Munich, Germany, 10–15 June 2018; pp. 376–388. [Google Scholar]
- Pu, Q.; Gupta, S.; Gollakota, S.; Patel, S. Whole-home gesture recognition using wireless signals. In Proceedings of the 19th Annual International Conference on Mobile Computing & Networking, Miami, FL, USA, 30 September–4 October 2013; pp. 485–486. [Google Scholar]
- Kellogg, B.; Talla, V.; Gollakota, S. Bringing gesture recognition to all devices. In Proceedings of the 11th USENIX Symposium on Networked Systems Design and Implementation, Seattle, WA, USA, 2–4 April 2014; pp. 303–316. [Google Scholar]
- Adib, F.; Katabi, D. See through walls with WiFi! In Proceedings of the ACM SIGCOMM 2013 Conference on SIGCOMM, Hong Kong, China, 12–16 August 2013; pp. 75–86. [Google Scholar]
- Zhao, M.; Tian, Y.; Zhao, H.; Alsheikh, M.A.; Li, T.; Hristov, R.; Kabelac, Z.; Katabi, D.; Torralba, A. RF-based 3D skeletons. In Proceedings of the 2018 Conference of the ACM Special Interest Group on Data Communication, Budapest, Hungary, 20–25 August 2018; pp. 267–281. [Google Scholar]
- Halperin, D.; Hu, W.; Sheth, A.; Wetherall, D. Tool release: Gathering 802.11n traces with channel state information. ACM Sigcomm Comput. Commun. Rev. 2011, 41, 53. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, D.; Wang, Y.; Ma, J.; Wang, Y.; Li, S. RT-Fall: A Real-time and Contactless Fall Detection System with Commodity WiFi Devices. IEEE Trans. Mob. Comput. 2017, 16. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Understanding and Modeling of WiFi Signal Based Human Activity Recognition. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 65–76. [Google Scholar]
- Wang, Z.; Guo, B.; Yu, Z.; Zhou, X. Wi-Fi CSI-Based Behavior Recognition: From Signals and Actions to Activities. IEEE Commun. Mag. 2018, 56, 109–115. [Google Scholar] [CrossRef]
- Wu, D.; Zhang, D.; Xu, C.; Wang, H.; Li, X. Device-Free WiFi Human Sensing: From Pattern-Based to Model-Based Approaches. IEEE Commun. Mag. 2017, 55, 91–97. [Google Scholar] [CrossRef]
- Ali, K.; Liu, A.X.; Wang, W.; Shahzad, M. Keystroke Recognition Using WiFi Signals. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 90–102. [Google Scholar]
- Chen, B.; Yenamandra, V.; Srinivasan, K. Tracking Keystrokes Using Wireless Signals. In Proceedings of the 13th Annual International Conference on Mobile Systems, Applications, and Services, Florence, Italy, 18–22 May 2015; pp. 31–44. [Google Scholar]
- Wang, G.; Zou, Y.; Zhou, Z.; Wu, K.; Ni, L. We Can Hear You with Wi-Fi! IEEE Trans. Mob. Comput. 2016, 15, 2907–2920. [Google Scholar] [CrossRef]
- Melgarejo, P.; Zhang, X.; Ramanathan, P.; Chu, D. Leveraging directional antenna capabilities for fine-grained gesture recognition. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 541–551. [Google Scholar]
- Venkatnarayan, R.H.; Page, G.; Shahzad, M. Multi-User Gesture Recognition Using WiFi. In Proceedings of the 16th Annual International Conference on Mobile Systems, Applications, and Services, Munich, Germany, 10–15 June 2018; pp. 401–413. [Google Scholar]
- Guo, B.; Chen, Y.J.; Lane, N.; Liu, Y.; Yu, Z. Behavior Recognition Based on Wi-Fi CSI: Part 1. IEEE Commun. Mag. 2017, 55, 90. [Google Scholar] [CrossRef]
- Guo, B.; Chen, Y.J.; Lane, N.; Liu, Y.; Yu, Z. Behavior Recognition Based on Wi-Fi CSI: Part 2. IEEE Commun. Mag. 2018, 56, 108. [Google Scholar] [CrossRef]
- Zhou, Z.; Yang, Z.; Wu, C.; Sun, W.; Liu, Y. LiFi: Line-Of-Sight identification with WiFi. In Proceedings of the IEEE INFOCOM 2014—IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; pp. 2688–2696. [Google Scholar]
- Gjengset, J.; Xiong, J.; McPhillips, G.; Jamieson, K. Phaser: Enabling phased array signal processing on commodity WiFi access points. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking, Maui, HI, USA, 7–11 September 2014; pp. 153–164. [Google Scholar]
- Wu, C.; Yang, Z.; Zhou, Z.; Qian, K.; Liu, Y.; Liu, M. PhaseU: Real-time LOS identification with WiFi. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Hong Kong, China, 26 April–1 May 2015; pp. 2038–2046. [Google Scholar]







© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Wang, L.; Fang, J.; Guo, L.; Lu, B.; Shu, L. Multi-Target Intense Human Motion Analysis and Detection Using Channel State Information. Sensors 2018, 18, 3379. https://doi.org/10.3390/s18103379
Liu J, Wang L, Fang J, Guo L, Lu B, Shu L. Multi-Target Intense Human Motion Analysis and Detection Using Channel State Information. Sensors. 2018; 18(10):3379. https://doi.org/10.3390/s18103379
Chicago/Turabian StyleLiu, Jialin, Lei Wang, Jian Fang, Linlin Guo, Bingxian Lu, and Lei Shu. 2018. "Multi-Target Intense Human Motion Analysis and Detection Using Channel State Information" Sensors 18, no. 10: 3379. https://doi.org/10.3390/s18103379
APA StyleLiu, J., Wang, L., Fang, J., Guo, L., Lu, B., & Shu, L. (2018). Multi-Target Intense Human Motion Analysis and Detection Using Channel State Information. Sensors, 18(10), 3379. https://doi.org/10.3390/s18103379