1. Introduction
Various types of damage and functional degradation are inevitable due to the ageing of materials and the environmental erosion of bridges and increasing overload vehicles. Dynamic deformation monitoring and real-time state evaluation of bridges in service are important to protect the carrying capacity, durability, and safety of bridge structures; provide early warning against emergency; and prevent huge economic loss and casualties under extreme conditions [
1].
Traditional monitoring methods of bridge structures requires sufficient test equipment, including accelerometers, strain gauges, and inclination sensors. This test equipment brings a heavy workload and suffers from immense environment-induced losses. Furthermore, this equipment can only measure the high-frequency dynamic displacement of the structure and cannot test low-frequency quasi-static displacement [
2]. The GNSS receivers feature easy operation, high environmental adaptation, satellite signal reception at any time, and long-term continuous monitoring. Additionally, the GNSS easily identifies low-frequency signals of structural vibration and can offset the disadvantages of traditional monitoring methods. The GNSS is increasingly appreciated in large-scale structural health monitoring as all test equipment can be developed continuously when combined with traditional monitoring equipment, such as an accelerometer [
3,
4,
5]. Roberts et al. [
6] designed a GNSS-accelerometer combined device in which the GNSS receiver was overlaid with the vertical axis of the accelerometer. Li et al. [
7] and Moschas et al. [
8] monitored the vibration responses of iron tower and steel bridge structures by combining an accelerometer and a GNSS receiver. Yi et al. [
9] presented an overview of research and development activities in the field of bridge health monitoring using the global positioning system (GPS).
Due to multiple errors, the GNSS has a high measurement accuracy to bridge with large vibration displacement and good flexibility. Nevertheless, with the continuing perfection and development of the GNSS hardware and software, the GNSS technology is being gradually used in the experimental study of bridge structures with relatively small amplitudes. Li et al. [
10,
11] designed an efficient multi-GNSS real-time precise positioning service system and presents a new GPS data processing scheme for real-time kinematic precise point positioning in order to shorten the convergence time and the observational time required for a reliable ambiguity-fixing. Li et al. [
12] presented an approach for tightly combing GPS and seismic sensor data where the accelerometer data are integrated into the ambiguity-fixed PPP (precise point positioning) processing on the observation level. Lee et al. [
13] proposed a detection, identification, and adaptive technique to improve the reliability of the GNSS positioning solution. Larocca et al. [
14] monitored the dynamic features of small concrete bridge structures using two GPS receivers with a 100 Hz sampling frequency. Ogundipe et al. [
15] performed GNSS monitoring of a viaduct with a steel box beam in Avonmouth, Bristol, England. They measured the vertical deflection at the main span (approximately 50 mm) point accurately and identified the natural frequency of vibration that conformed to finite element calculation results. Moschas et al. [
16] implemented a dynamic response monitoring test to a steel footbridge with a 41.5 m main span range by using a GNSS receiver and an accelerometer. They measured the millimeter-scale dynamic displacement of a bridge structure and identified the vertical and horizontal frequencies of vibration. In this study, the real-time dynamic responses of the Tianjin Fumin Bridge in China were tested by combining the GNSS-Real Time Kinematic (RTK) technique and acceleration sensing. Real dynamic displacement of the bridge structure was extracted, and its vertical vibration performance was analyzed.
In the past, the GNSS-based measurement method for bridge monitoring was mainly used for real dynamic displacement extraction, which is infrequently used in modal parameter identification. Identification of modal parameters is important in the theoretical research and engineering applications of health monitoring, damage assessment, and the active control of bridge structures [
17,
18,
19]. Given the increasing span and complexity of modern bridge structures, gaining effective excitation signals through human motivation (such as shakers and drop weights) is difficult, and may cause unnecessary damage to bridge structures [
20]. Therefore, traditional theories and techniques concerning the identification of structural modal parameters based on input and output signals are not applicable. Identification methods of bridge structural modal parameters under ambient excitation (e.g., wind-induced vibration, earth pulse, and stimulus of vehicles) requires no human stimulus, only the mathematical and mechanical analyses of output signals as well as the identification of modal parameters in the time or frequency domains. These methods are feasible and practical in engineering applications. At present, the main modal parameter identification methods based on ambient excitation includes the random decrement technique (RDT) [
21]; the natural excitation technique (NExT) [
22]; the Ibrahim time domain technique (ITD) [
23]; the ARMA [
24]; and the random subspace method [
25] in the time domain. In addition, some identification methods in the frequency domain can be used to identify modal parameters under ambient excitation; these methods include the peak-picking technique and the frequency-domain decomposition technique. In this study, the time-domain modal parameters of the preprocessed GNSS monitoring data were identified, and the traditional RDT for stationary random processes was expanded to non-stationary random processes. An improved identification method of ARMA_RDT modal parameters was applied to analyze the real-time dynamic monitoring data of the GNSS and extract the modal frequency of bridge structural systems in service.
To increase the measurement accuracy of the GNSS dynamic monitoring and expand it for the application of modal parameters identification, the dynamic responses of the Tianjin Fumin Bridge were monitored and tested by combining the GNSS sensor technology and acceleration sensing. An AFEC mixed filtering algorithm was proposed to extract the real vibration displacement of the bridge structure. Modal parameters of the bridge structure were identified using the expanded time-domain modal identification method (expanded ARMA_RDT) and then compared with the results of traditional acceleration sensor testing and finite element analysis. In this paper,
Section 2 introduces the principle of the GNSS dynamic deformation monitoring.
Section 3 presents the AFEC mixed filtering algorithm.
Section 4 states the theory of the expanded ARMA_RDT modal identification method.
Section 5 discusses engineering applications, and
Section 6 presents our conclusions.
2. Principle of GNSS Dynamic Deformation Monitoring
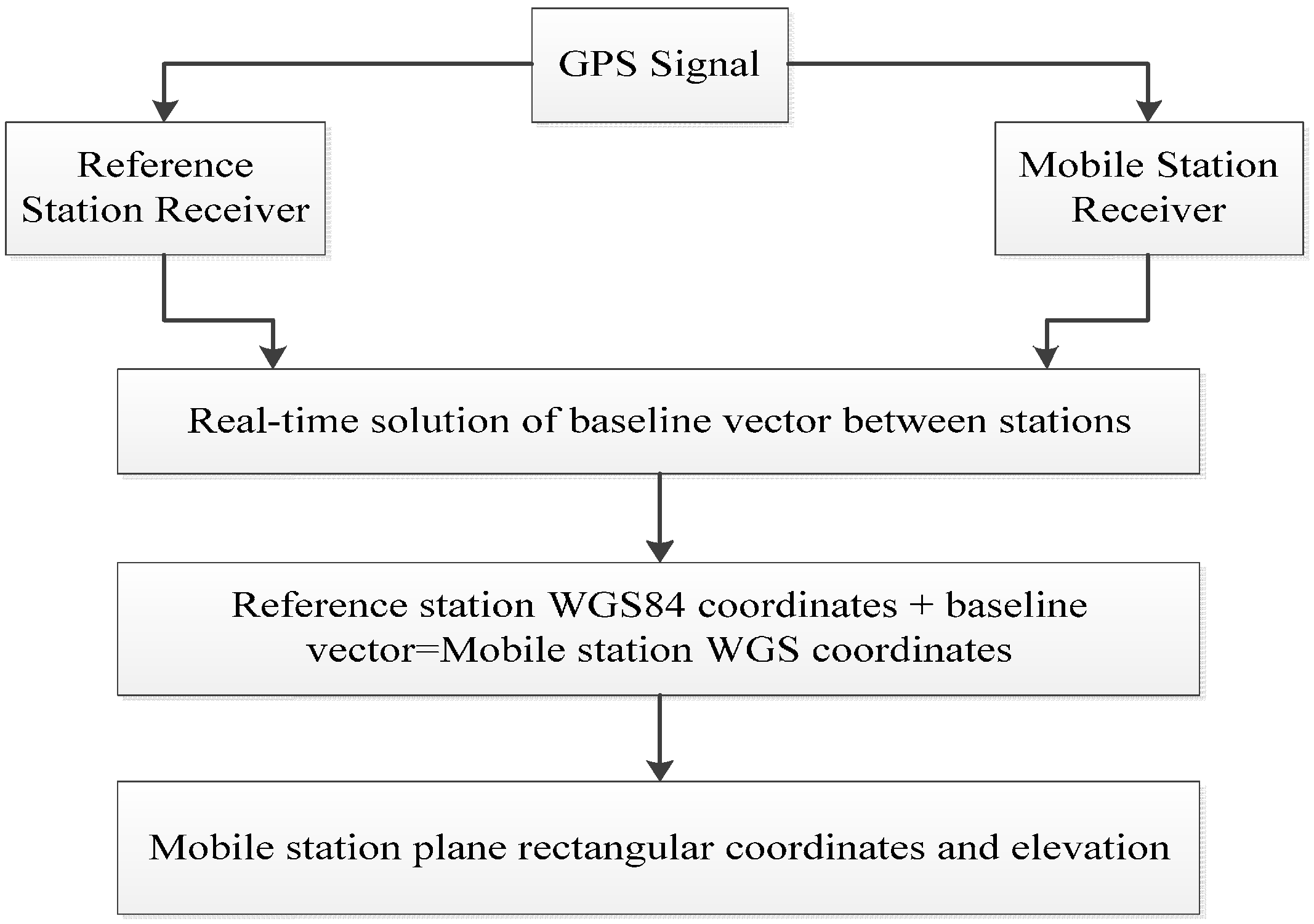
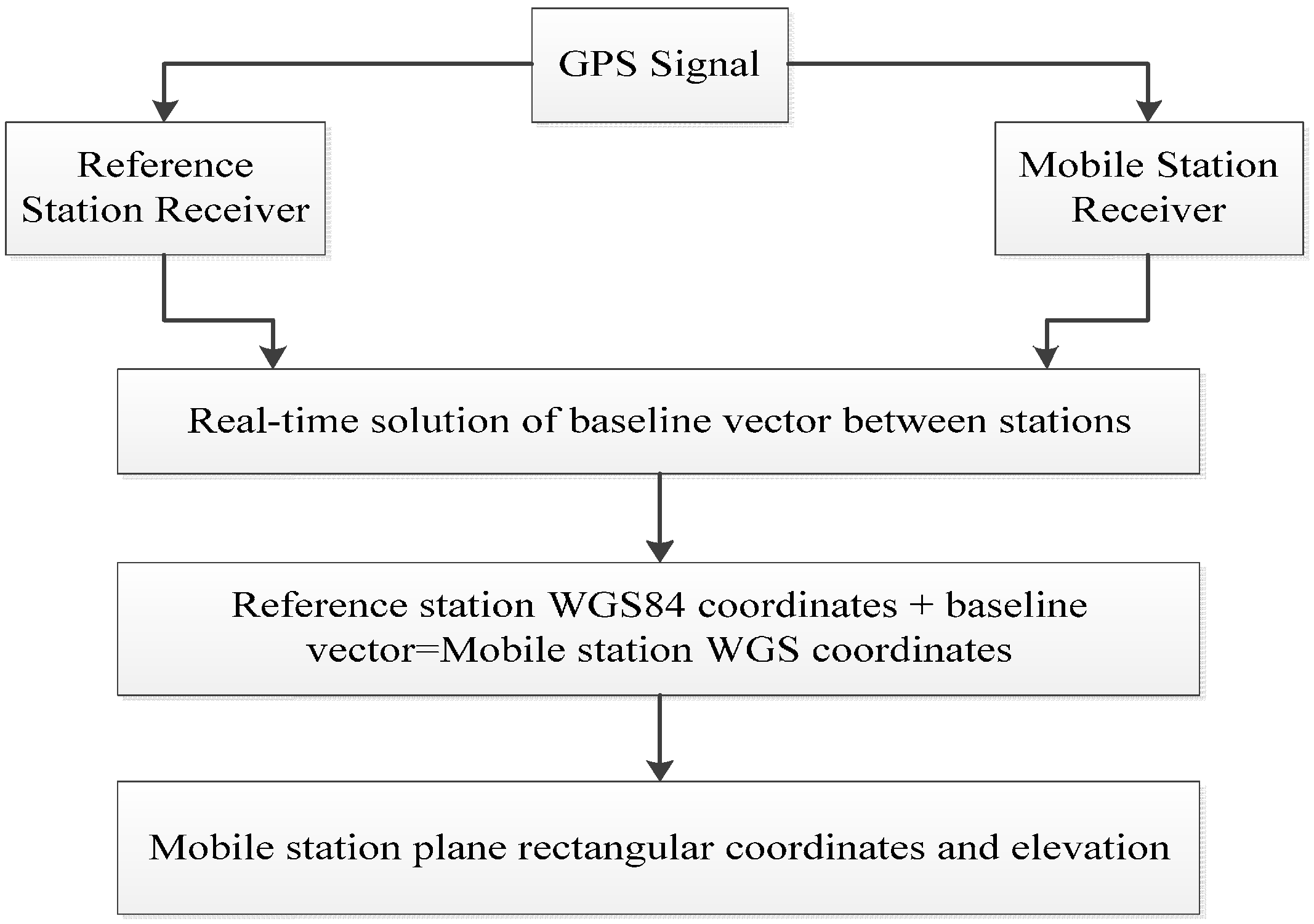
GNSS refers to all satellite navigation systems including American GPS; Russian Glonass; European Galileo; China’s Beidou navigation systems; and related enhancement systems. According to the characteristics of monitoring objects, GNSS deformation monitoring is divided into periodic measurement; fixed continuous GPS station array; and real-time dynamic monitoring. The first two types use static data calculation as the monitoring objects are generally viewed as static changes for slow deformation and long periods. In general, RTK monitoring is used to reduce the influences of different system errors and obtain real-time high-accuracy coordinates of measuring points. RTK monitoring is a real-time differential GPS technique based on the observed quantity of carrier phase, which is mainly applicable to long-term deformation with sudden changes and vibration deformation under ambient excitation. The working principle of the RTK technique is to set one GPS receiver at the reference station to observe all visible GPS satellites continuously and return real-time monitoring data to mobile stations. GPS receivers on mobile stations receive the observed data from the reference station through radio-receiving equipment while receiving GPS satellite signals. Subsequently, they perform real-time calculations and display 3D coordinates and accuracy of the user stations according to the principle of relative positioning [
9]. The working mode is shown in
Figure 1.
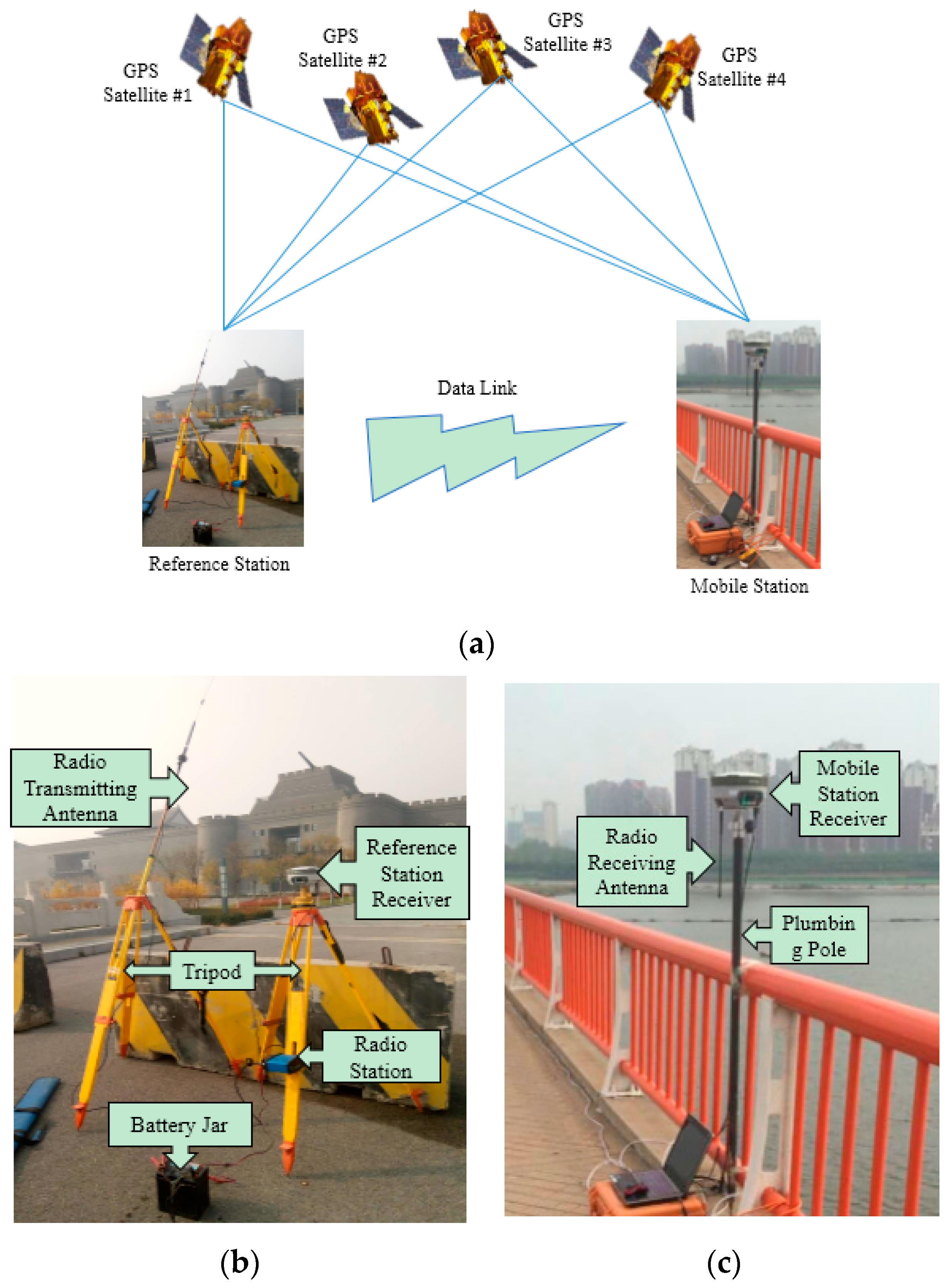
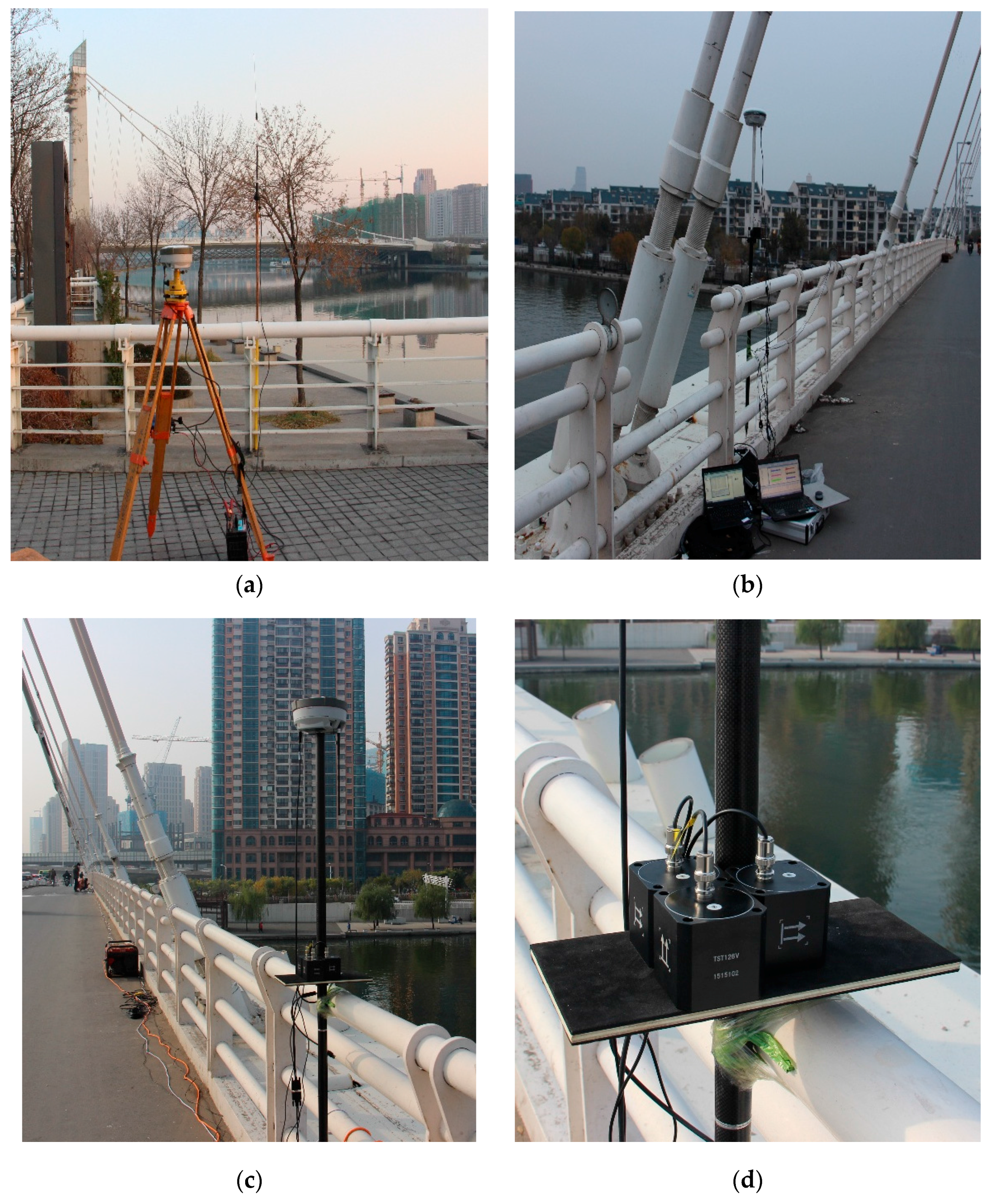
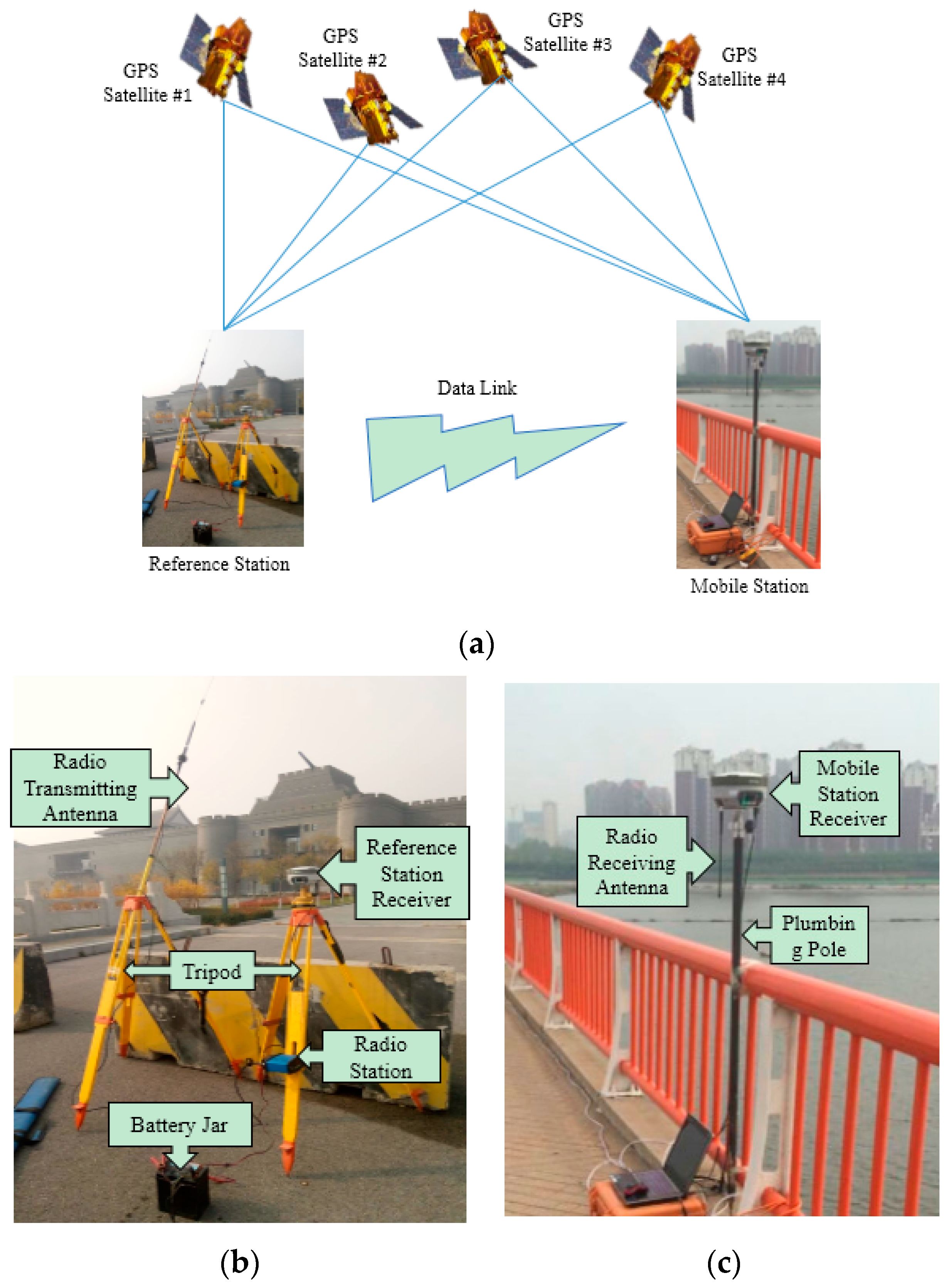
The GNSS-RTK system includes earth-circling satellites, a reference station, and mobile stations (
Figure 2a). The reference station is composed of a GPS receiver, a satellite earth antenna, a wireless data link transceiver and transmitting antenna, and a direct-current power supply (
Figure 2b). The mobile station is composed of a GPS receiver, a satellite earth antenna, a wireless data link receiver and antenna, and a data collector (
Figure 2c).
3. AFEC Mixed Filtering
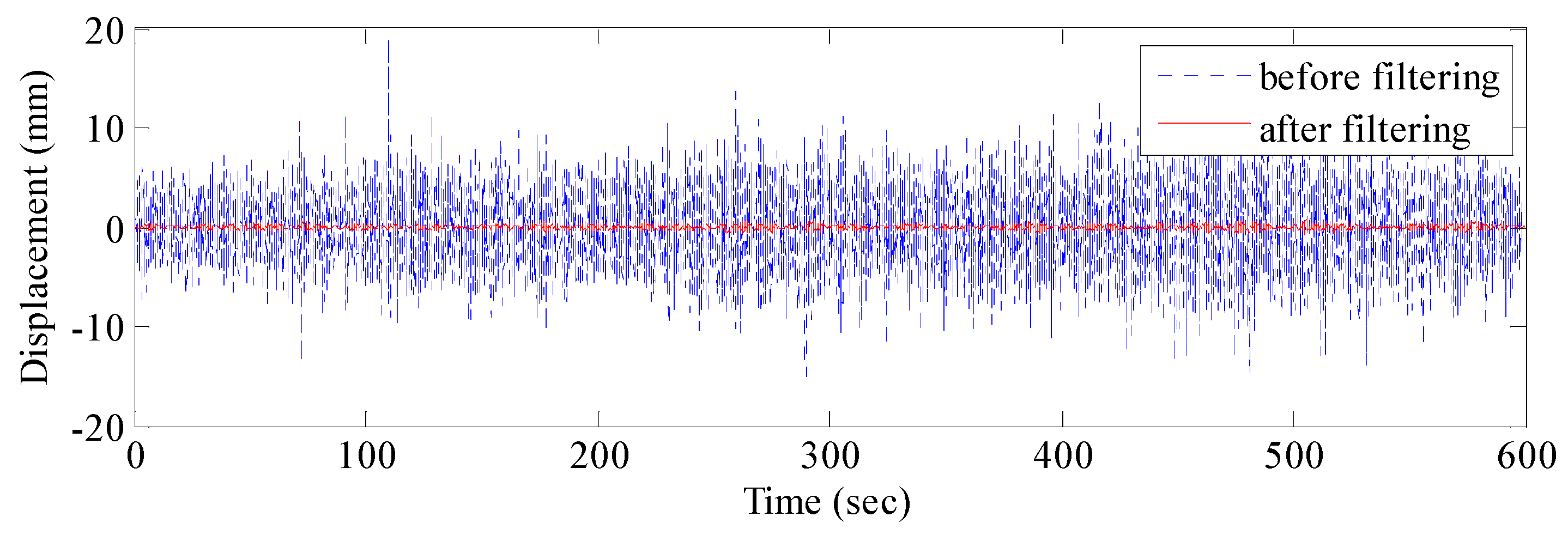
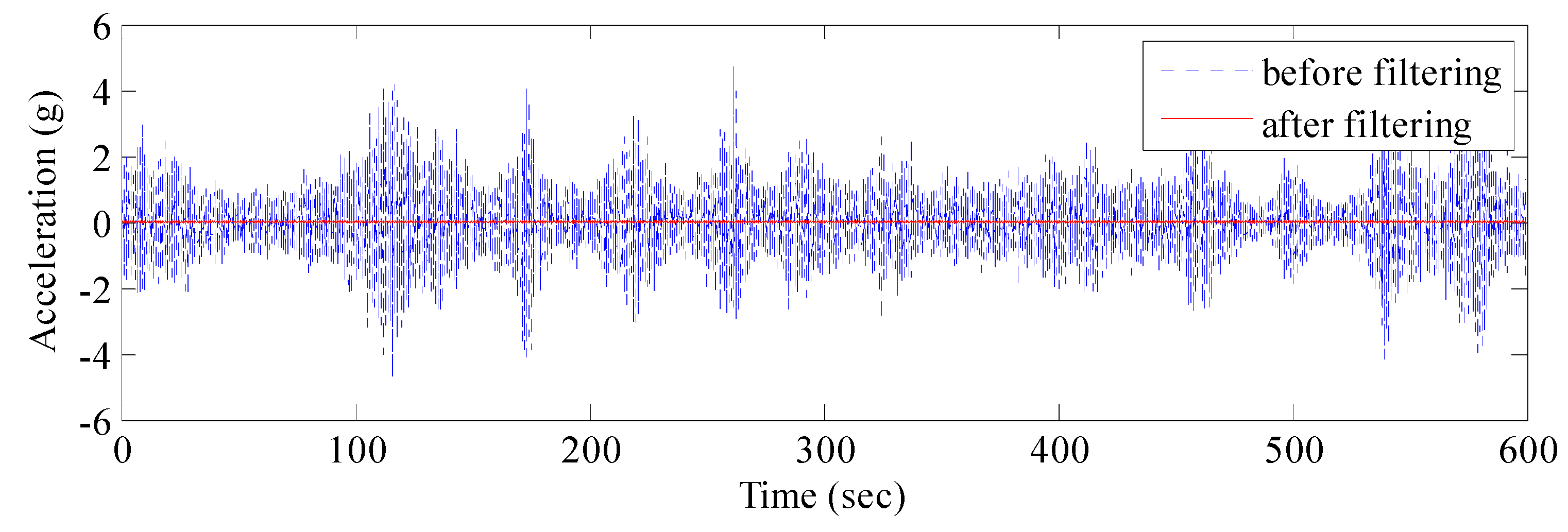
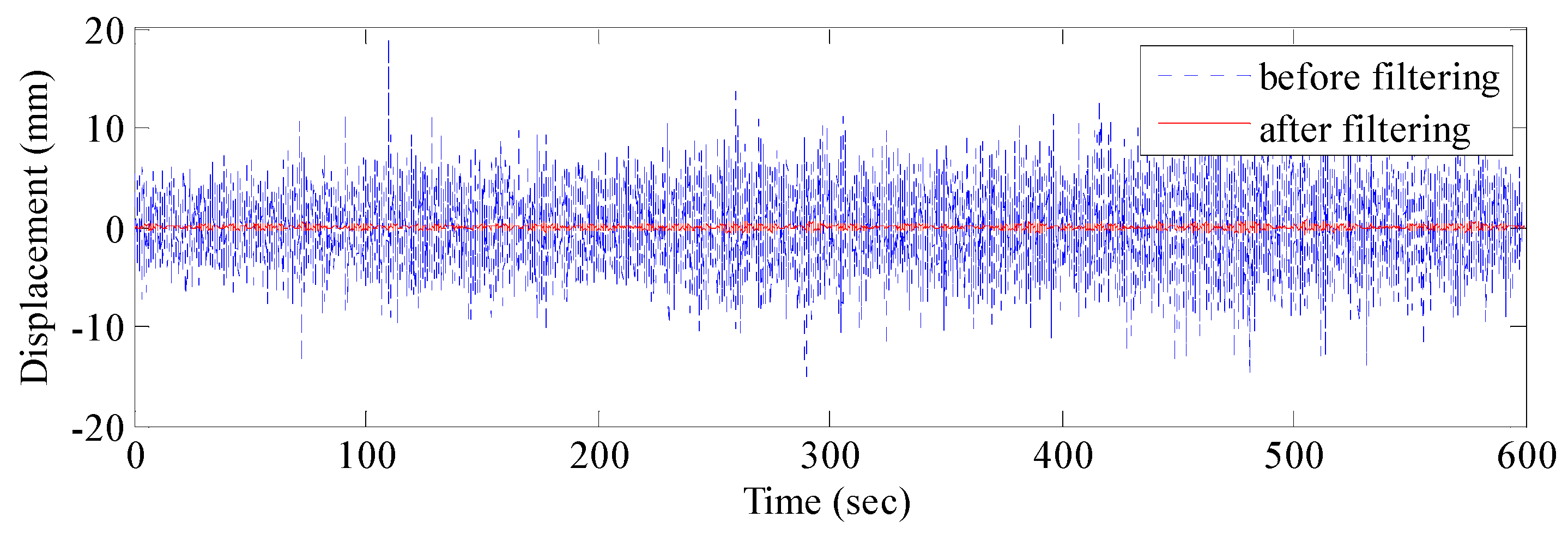
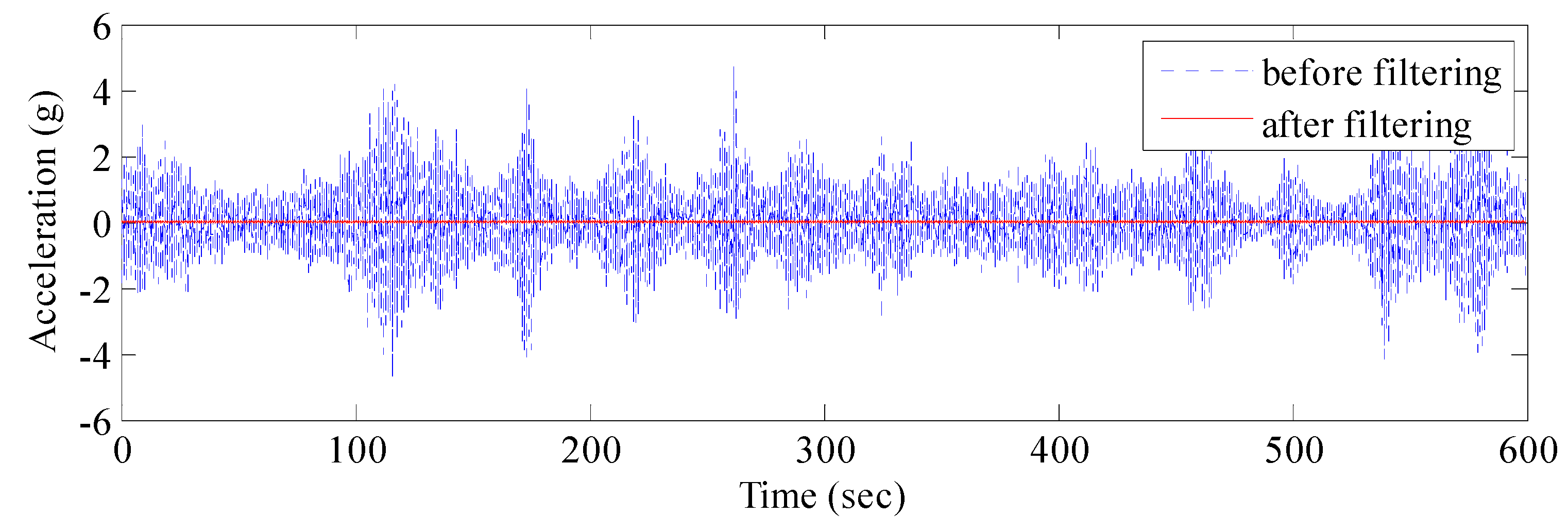
In general, the GNSS has a short baseline (<10 km) in structural dynamic monitoring, which can reduce errors caused by the troposphere and the ionized layer to some extent but cannot decrease multipath errors and random noise [
26]. Therefore, the GNSS monitoring signals mainly cover real structural vibration information, multipath errors, and random noise. Multipath errors are mainly distributed in the 0–0.2 Hz frequency band [
27], whereas random noise is distributed in a wide frequency band and has low energies. Given that the GNSS monitoring data contain countless noises and the vertical error is approximately 20 mm, the GNSS has difficulty in identifying millimeter-scale real vibrations of medium-sized and small bridge structures. An AFEC mixed filtering algorithm was proposed to solve these problems. Chebyshev filtering is applicable to ripple-like frequency response amplitudes on the pass-band or stop-band and is often used to filter structural vibration signals. The EMD technique decomposes signals from small to big according to the characteristic scale of local time, obtaining limited intrinsic modal functions (IMFs) from large to small frequencies. This technique has the advantages of multi-resolution and solution of the wavelet base selection in wavelet transform. Moreover, the EMD technique decomposes signals from scale characteristics of signals. It possesses good local adaptation and adaptability, and is convenient for filtering and de-noising non-stationary signals.
Signal
Xi can be gained by preprocessing signal
xi collected by the GNSS and neglecting the minor constituent. In the dynamic deformation monitoring of the structure of GNSS, the measurement error is caused by many factors. In GNSS short-baseline double-difference solution processing, errors caused by tropospheric and ionospheric delays, satellite ephemeris errors, satellite clock errors, receiver clock errors and receiver position errors can be weakened. Some errors can’t be weakened, such as multi-path error and random noise. Ignoring minor components, such as the errors caused by earth tides and load tide, the preprocessed signal
Xi can be expressed as
where
Xi is the GNSS test data at the test point
i after preprocessing;
n is the data length;
is the real vibration information of the bridge structure;
is the multipath errors of signals; and
is the random noise of signals.
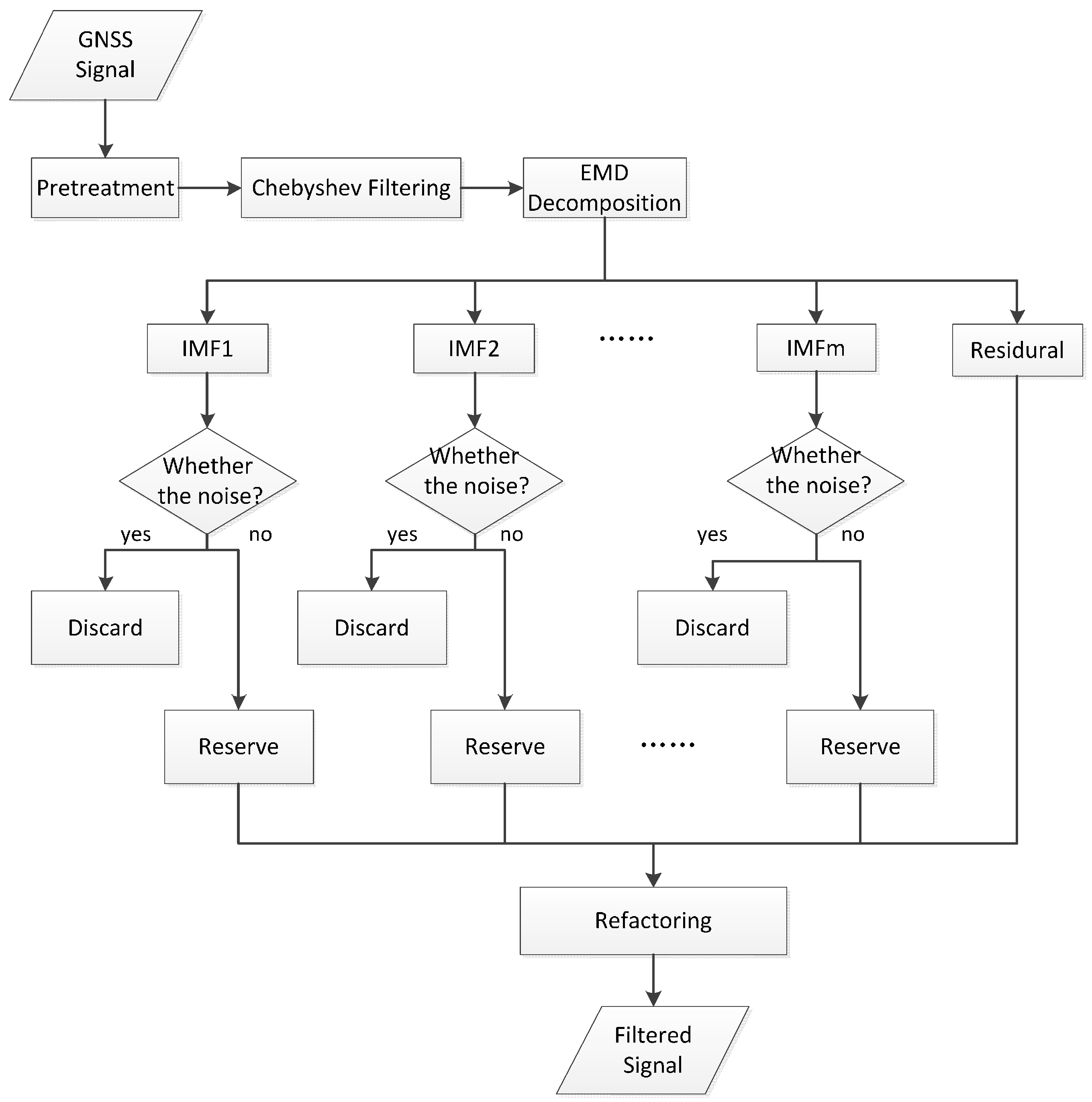
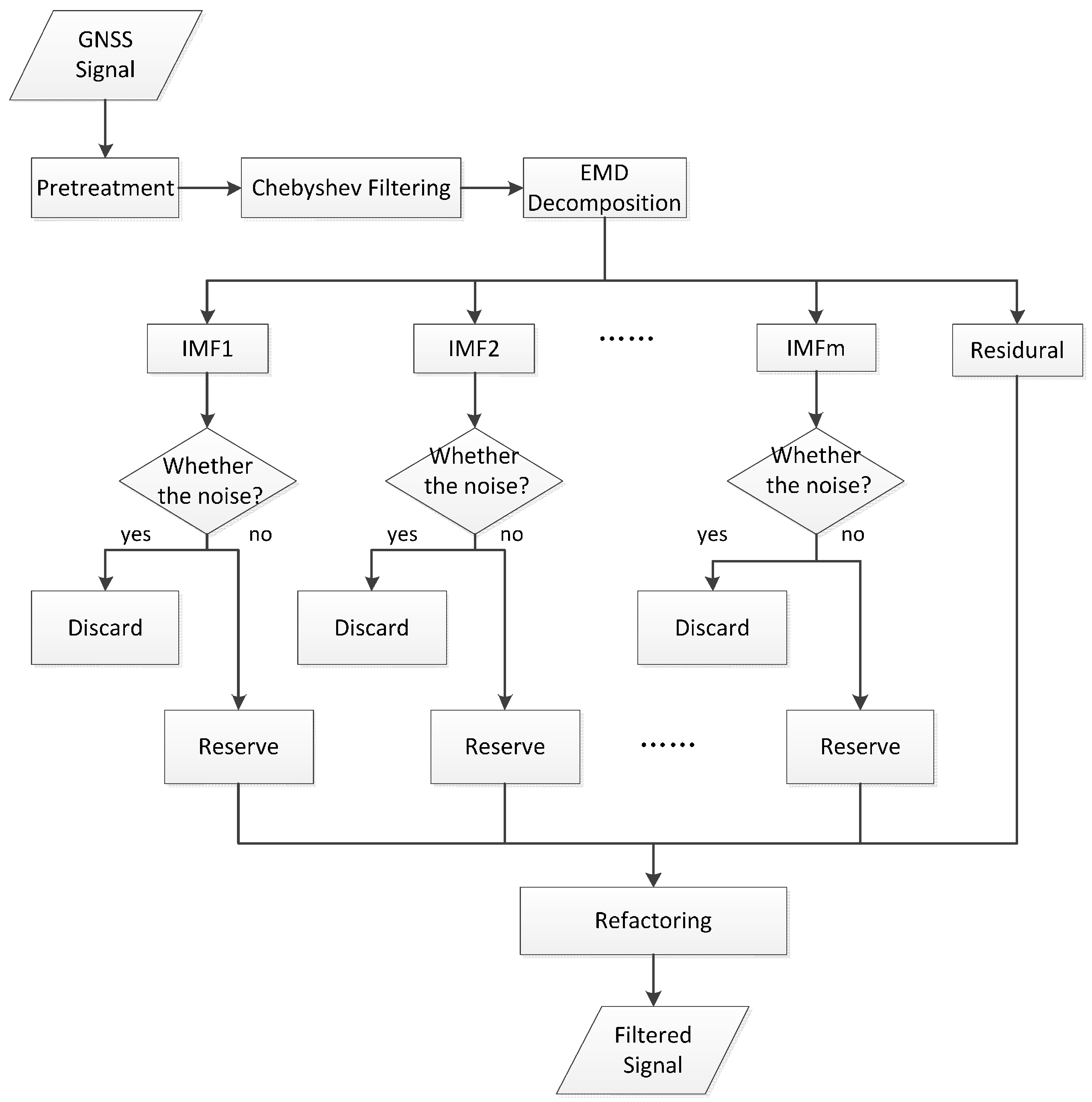
AFEC mixed filtering has two steps (
Figure 3):
- (1)
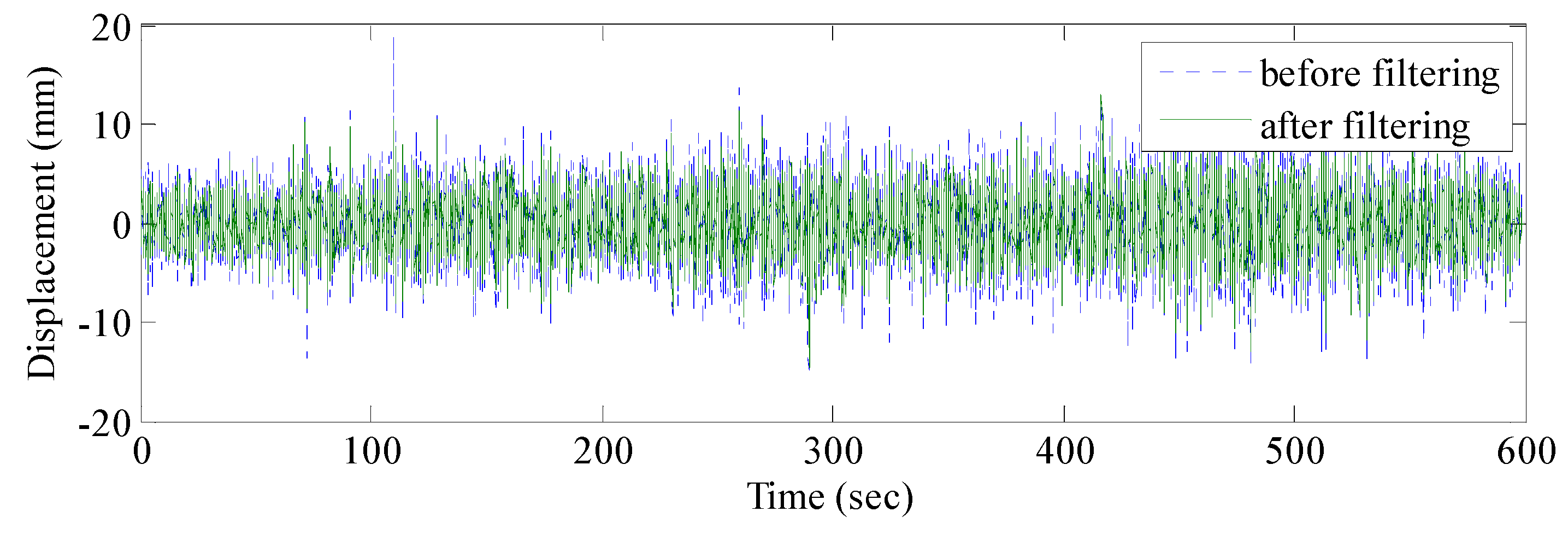
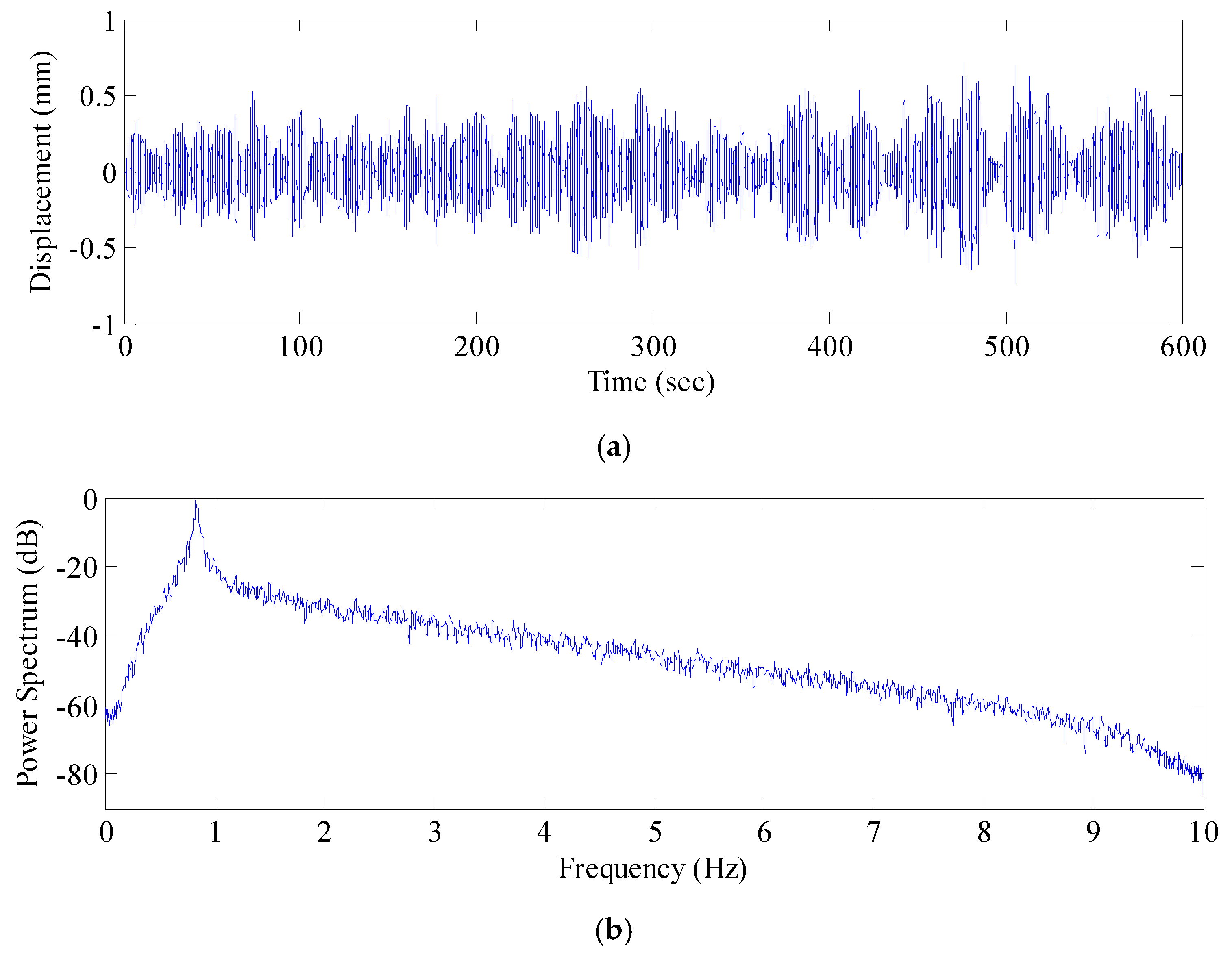
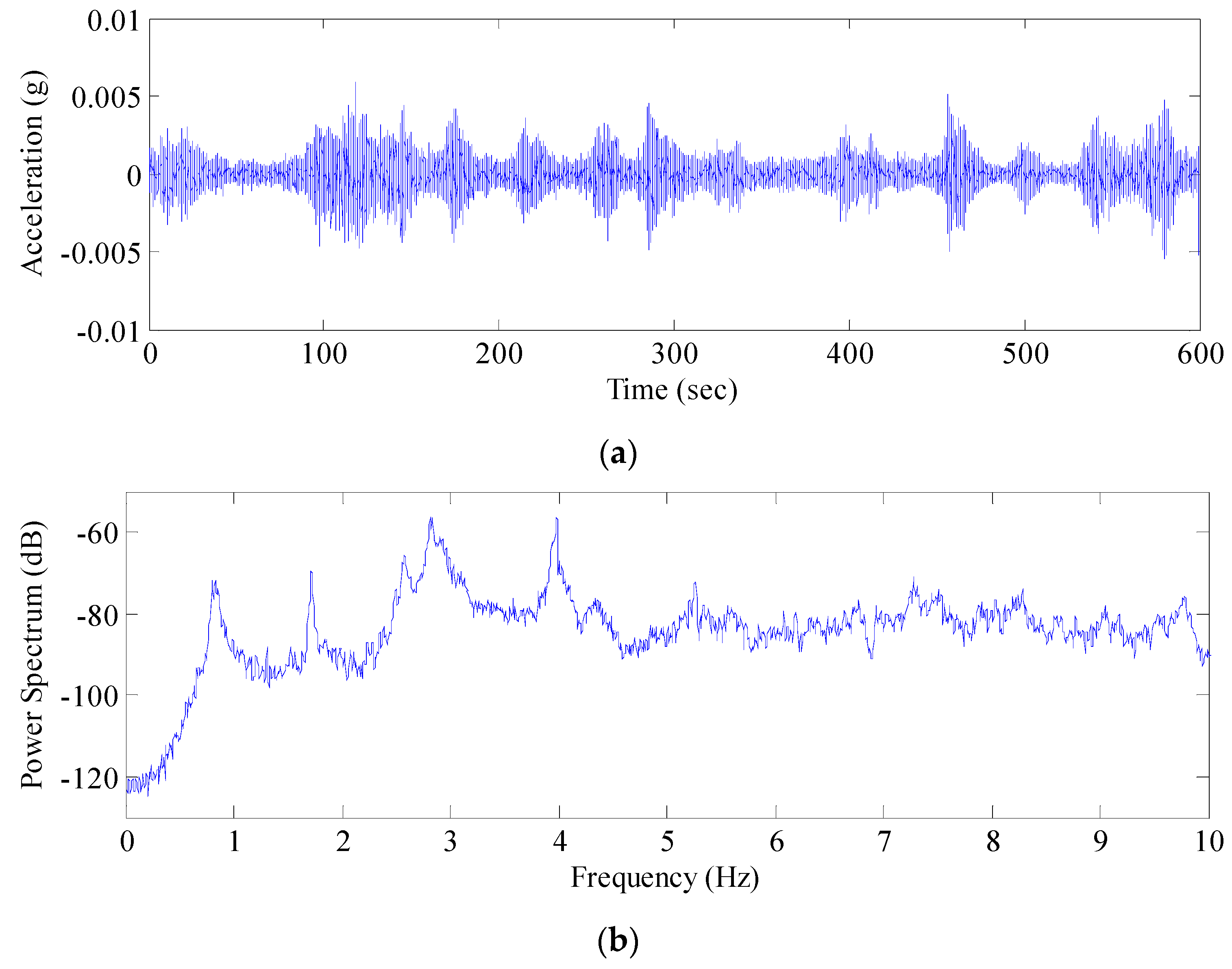
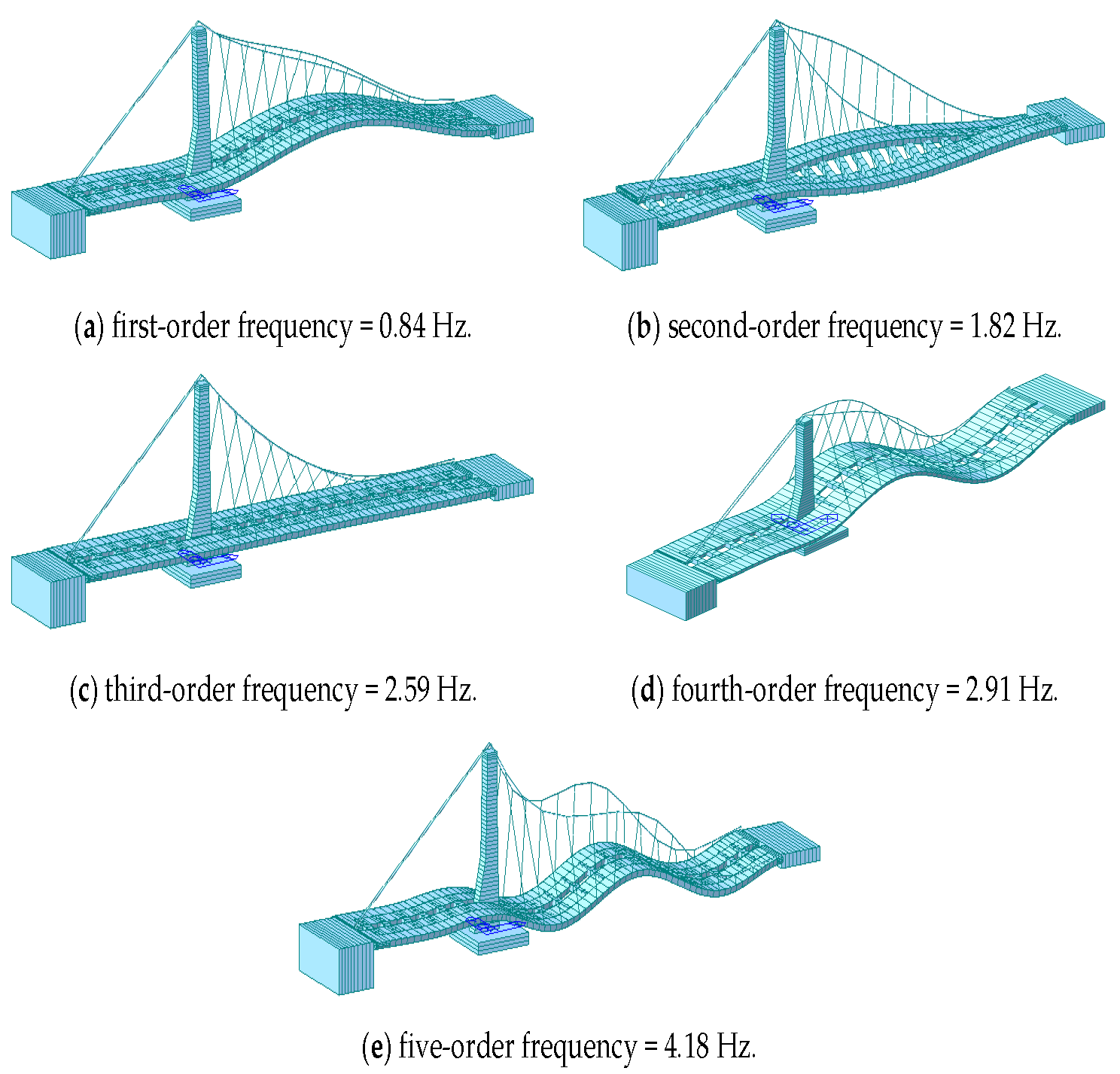
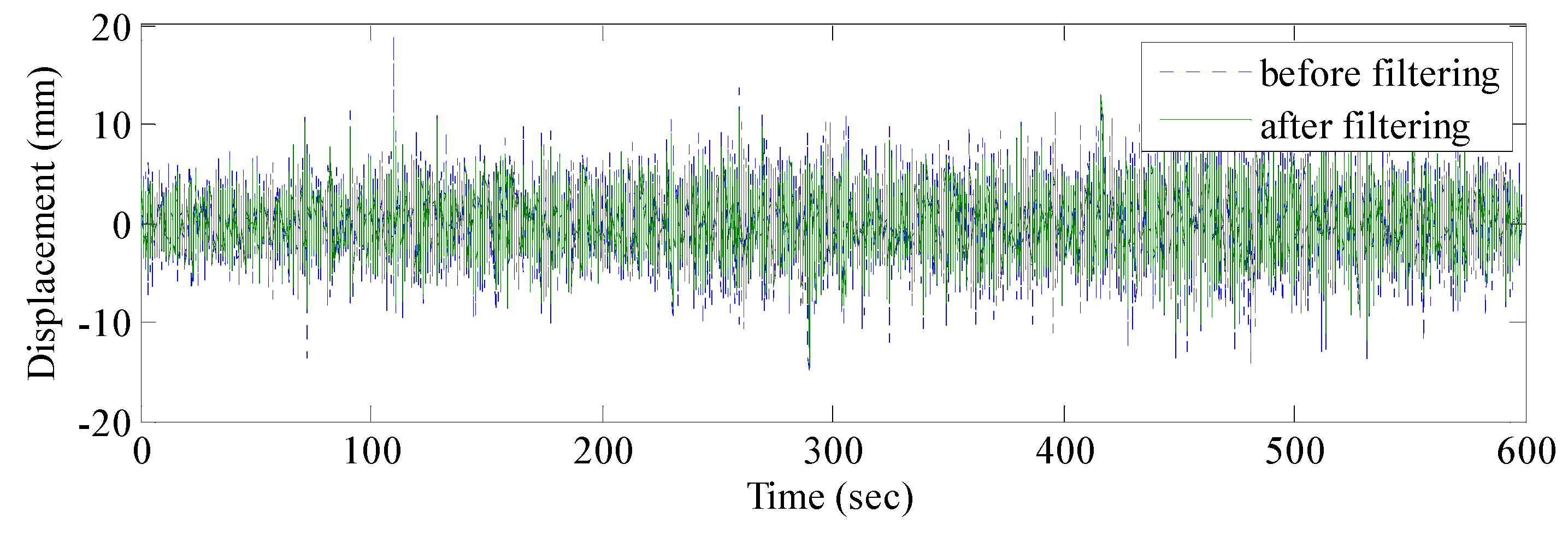
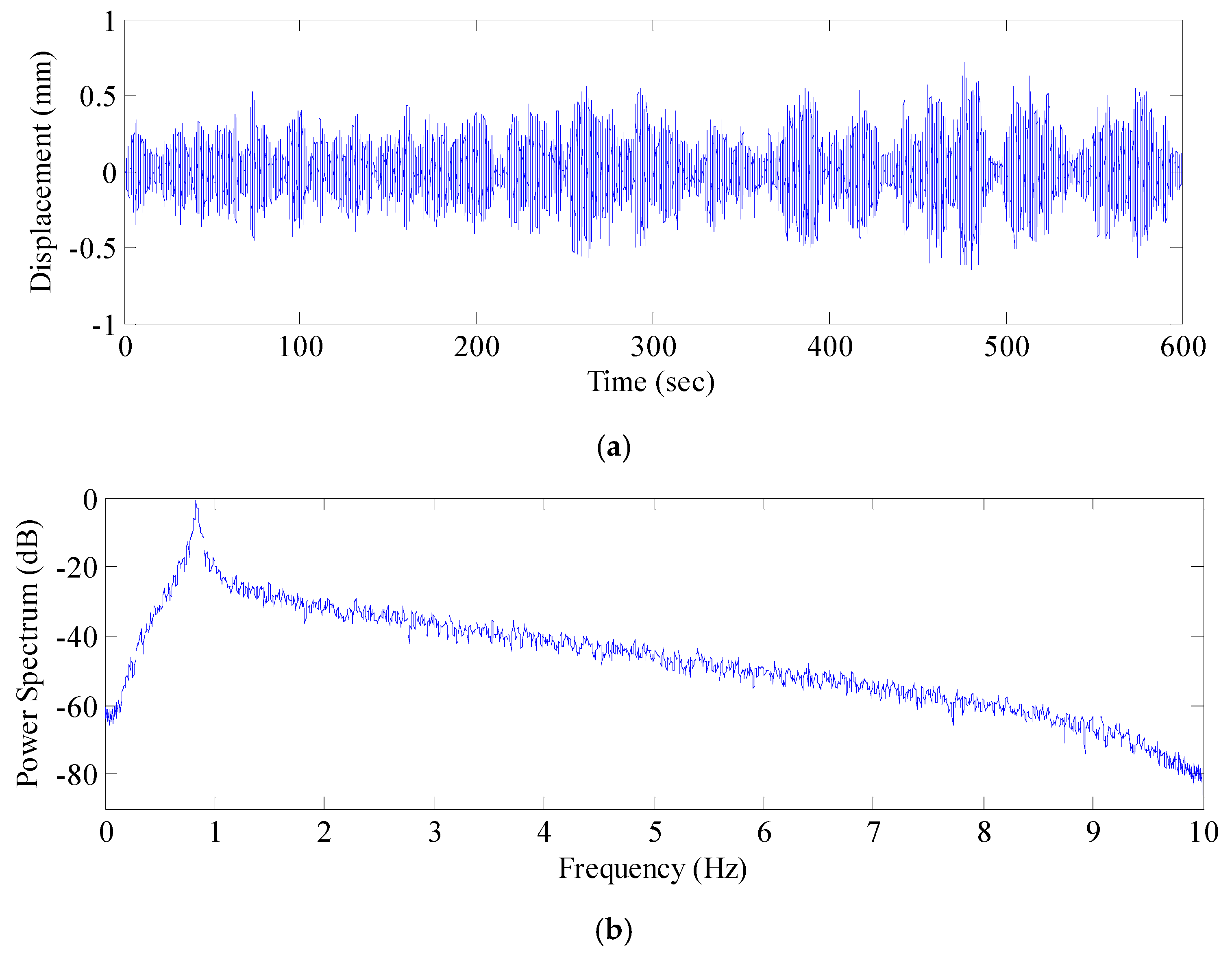
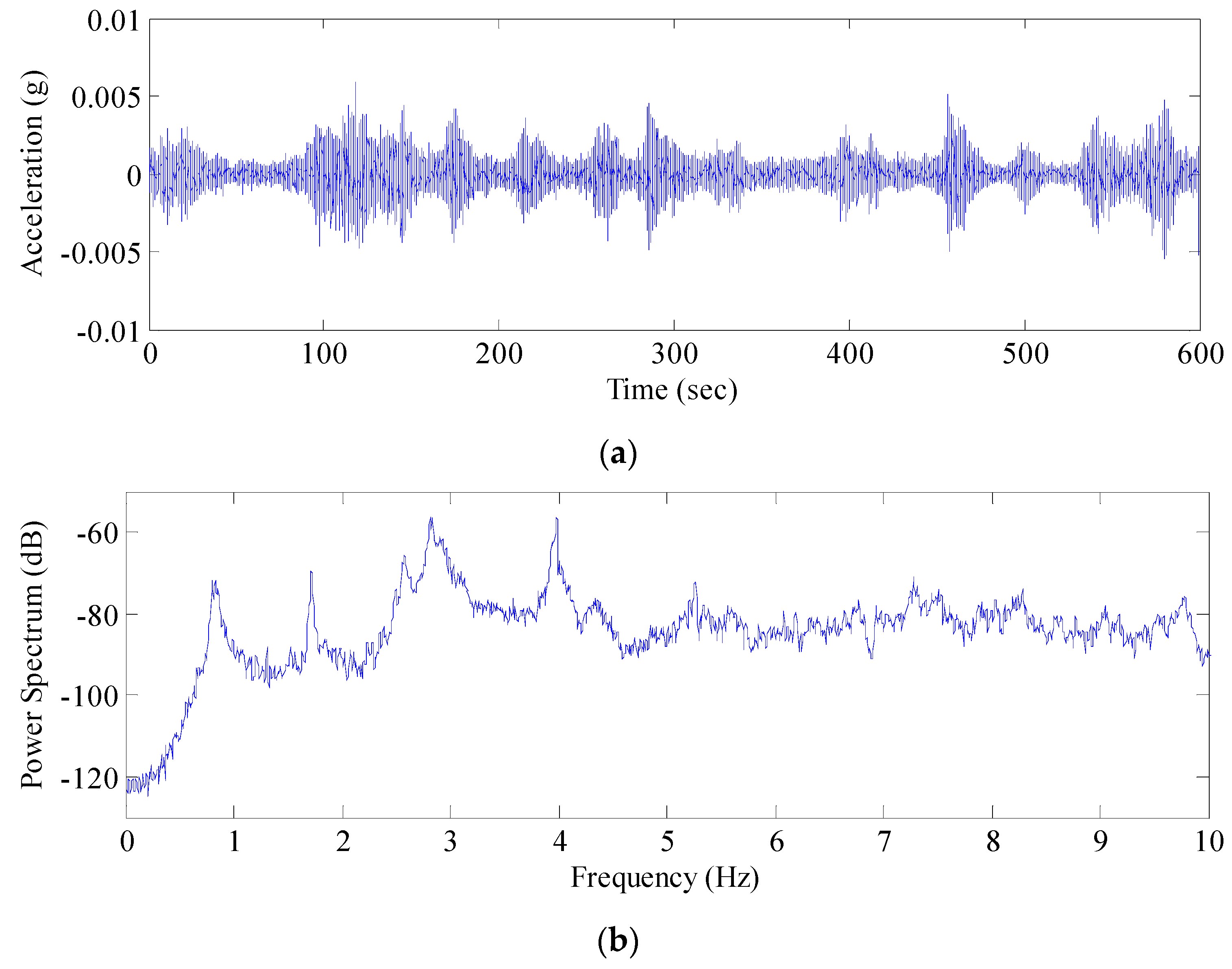
Multipath errors are eliminated by Chebyshev high-pass filtering, and the fundamental vibrational frequency of the test bridge structure was calculated as 0.83 Hz by using finite element analysis. The pass-band frequency of an 8-order I-type Chebyshev high-pass filter was designed at 0.4 Hz. This 8-order I-type Chebyshev high-pass filter was used to process the GNSS monitoring data Xi, obtaining the signal after the multipath error was eliminated: .
- (2)
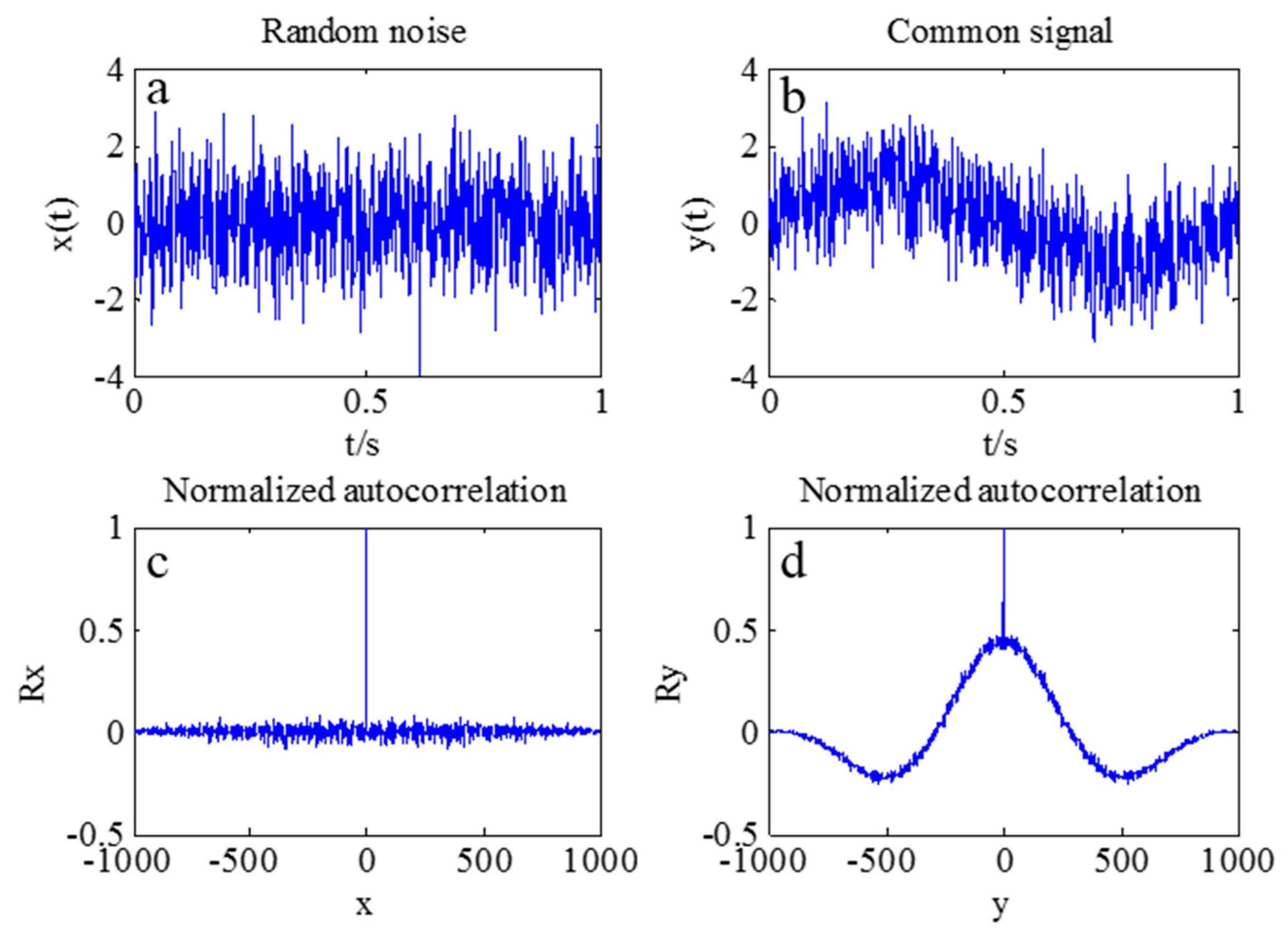
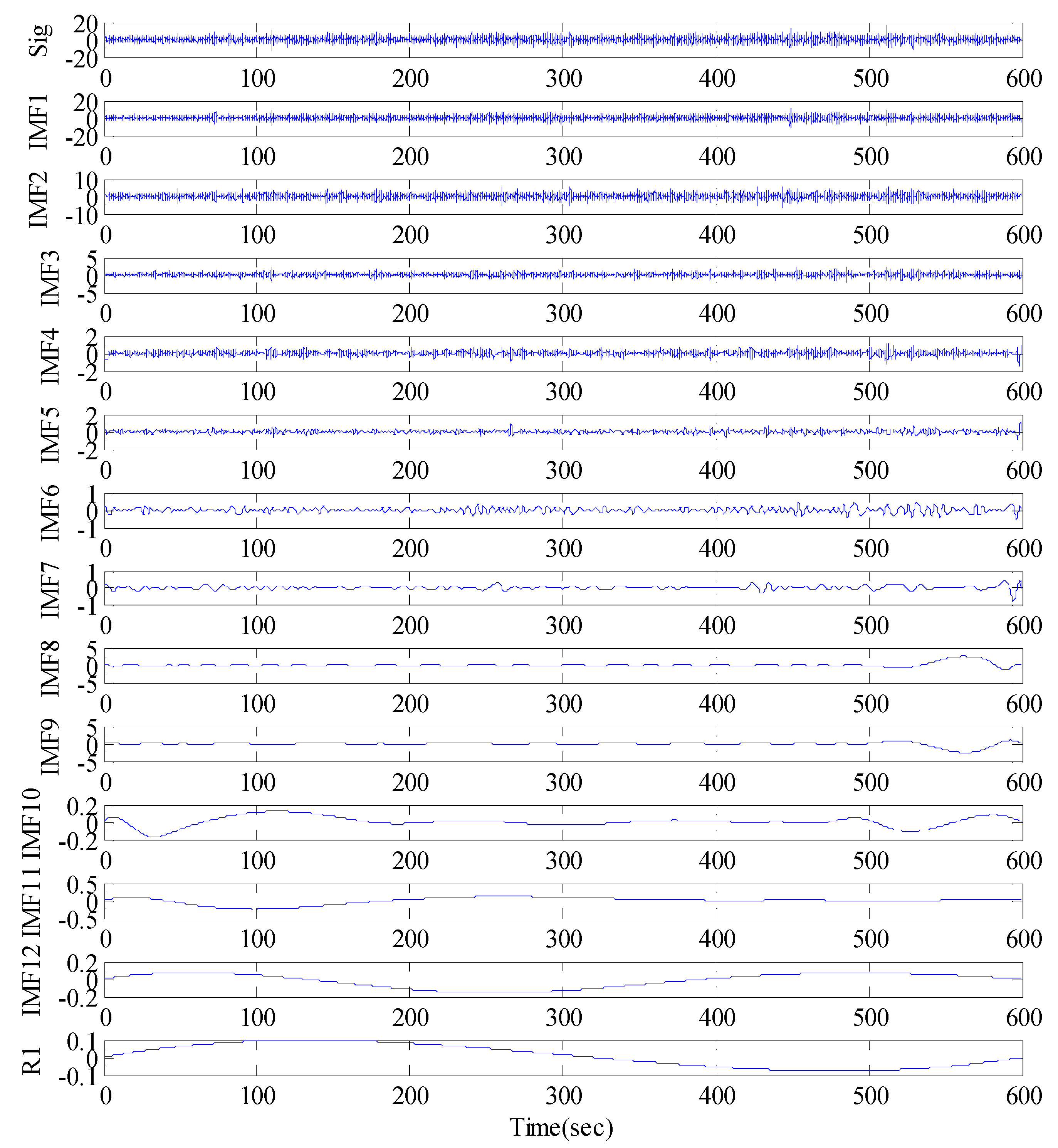
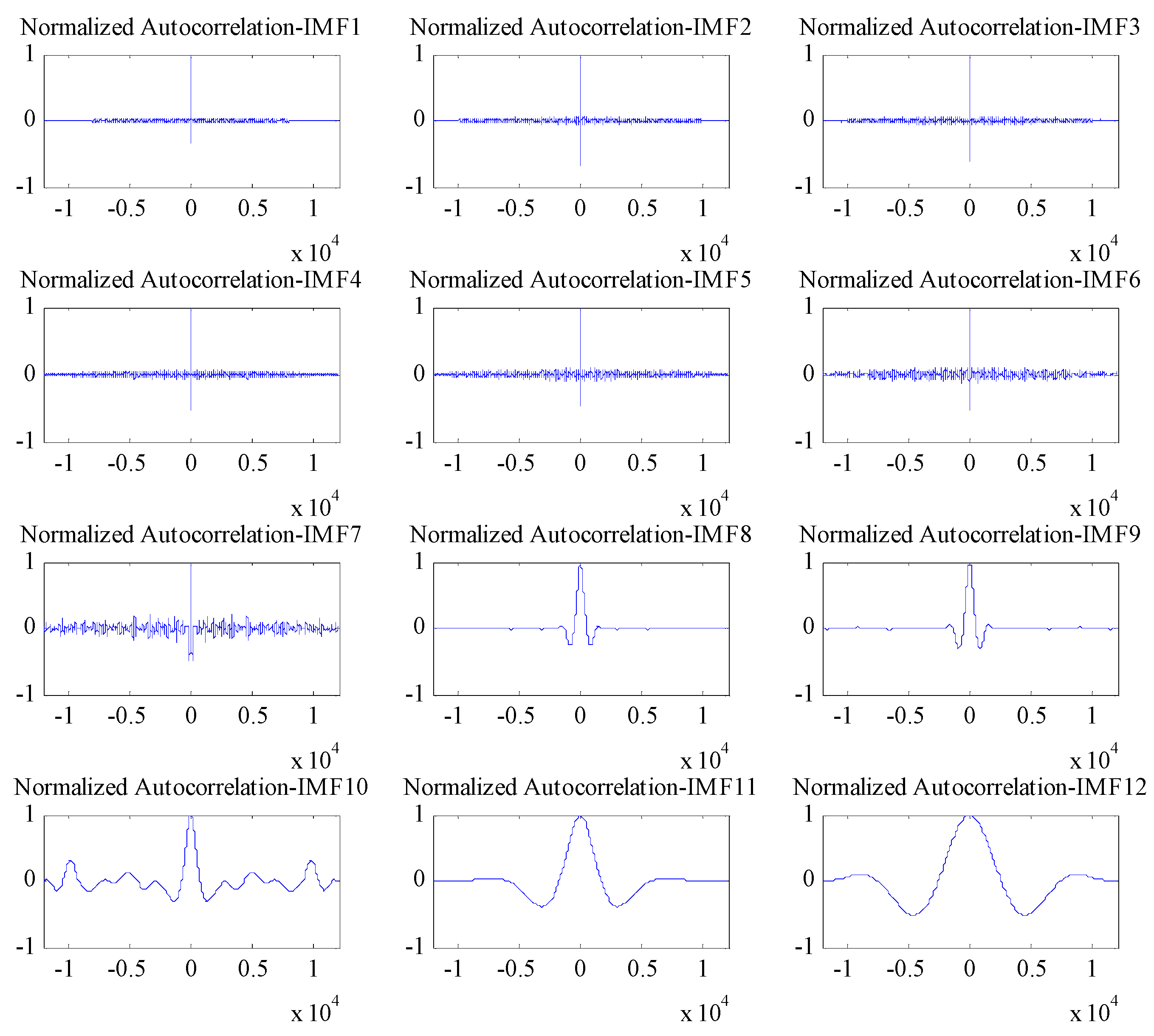
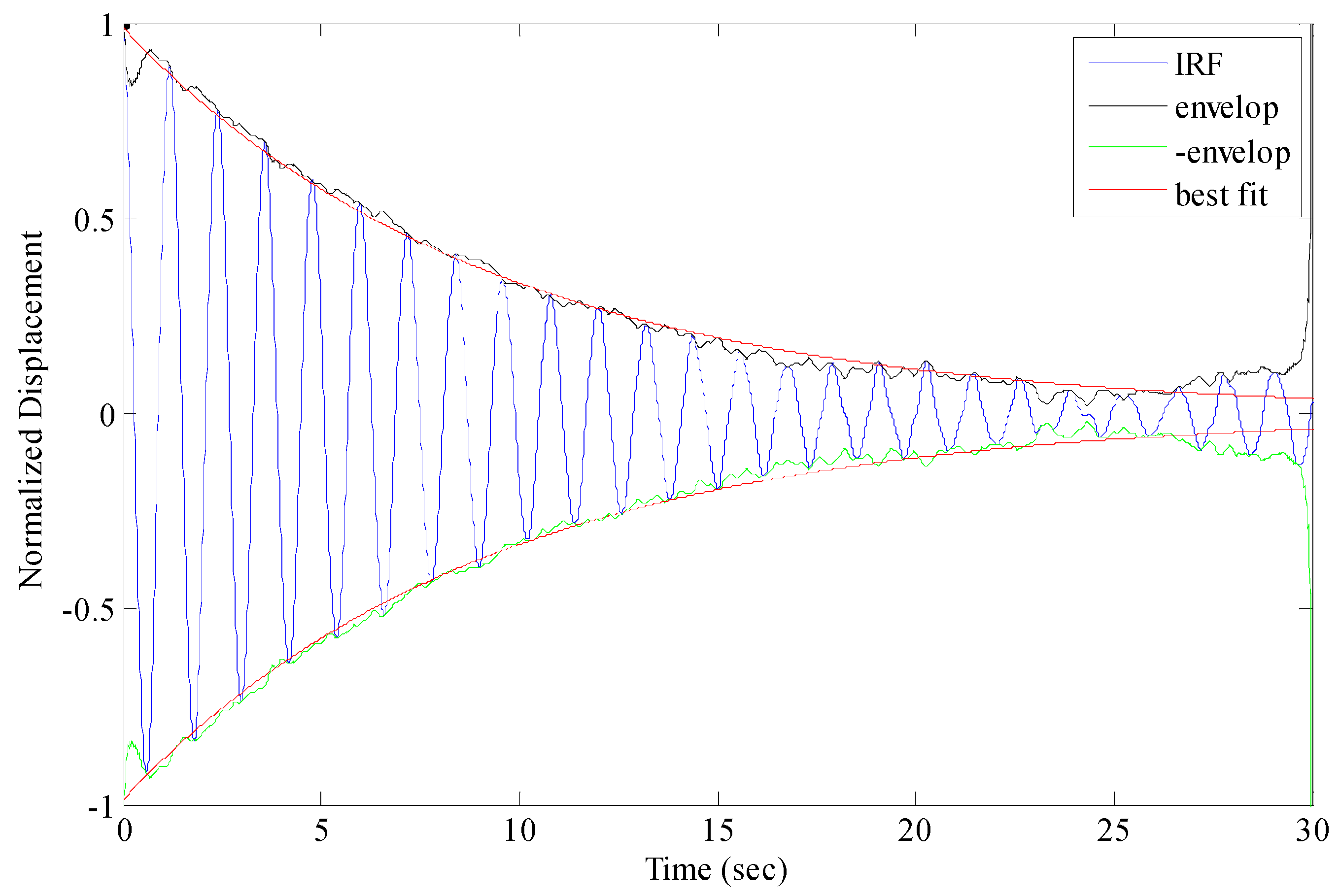
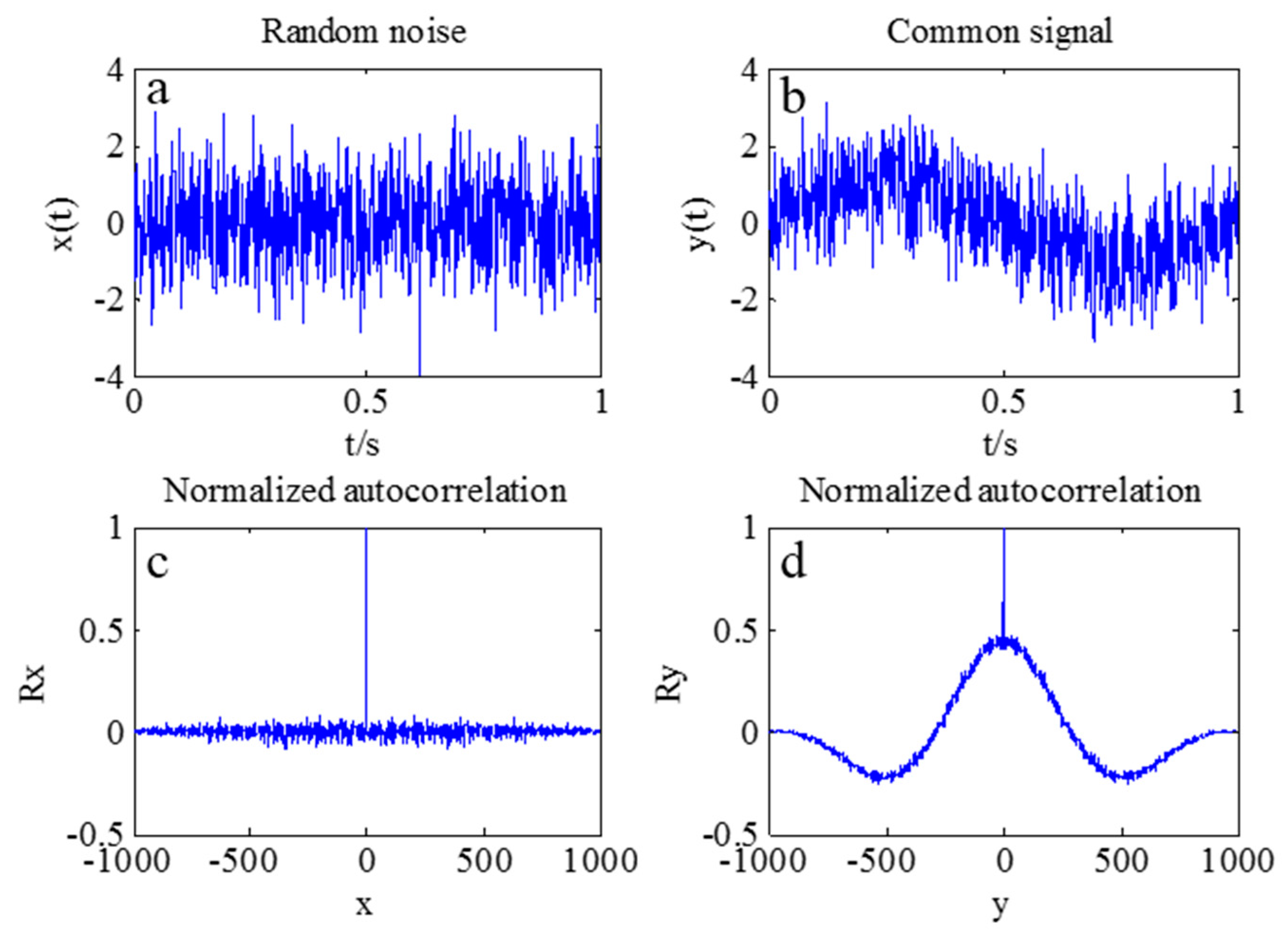
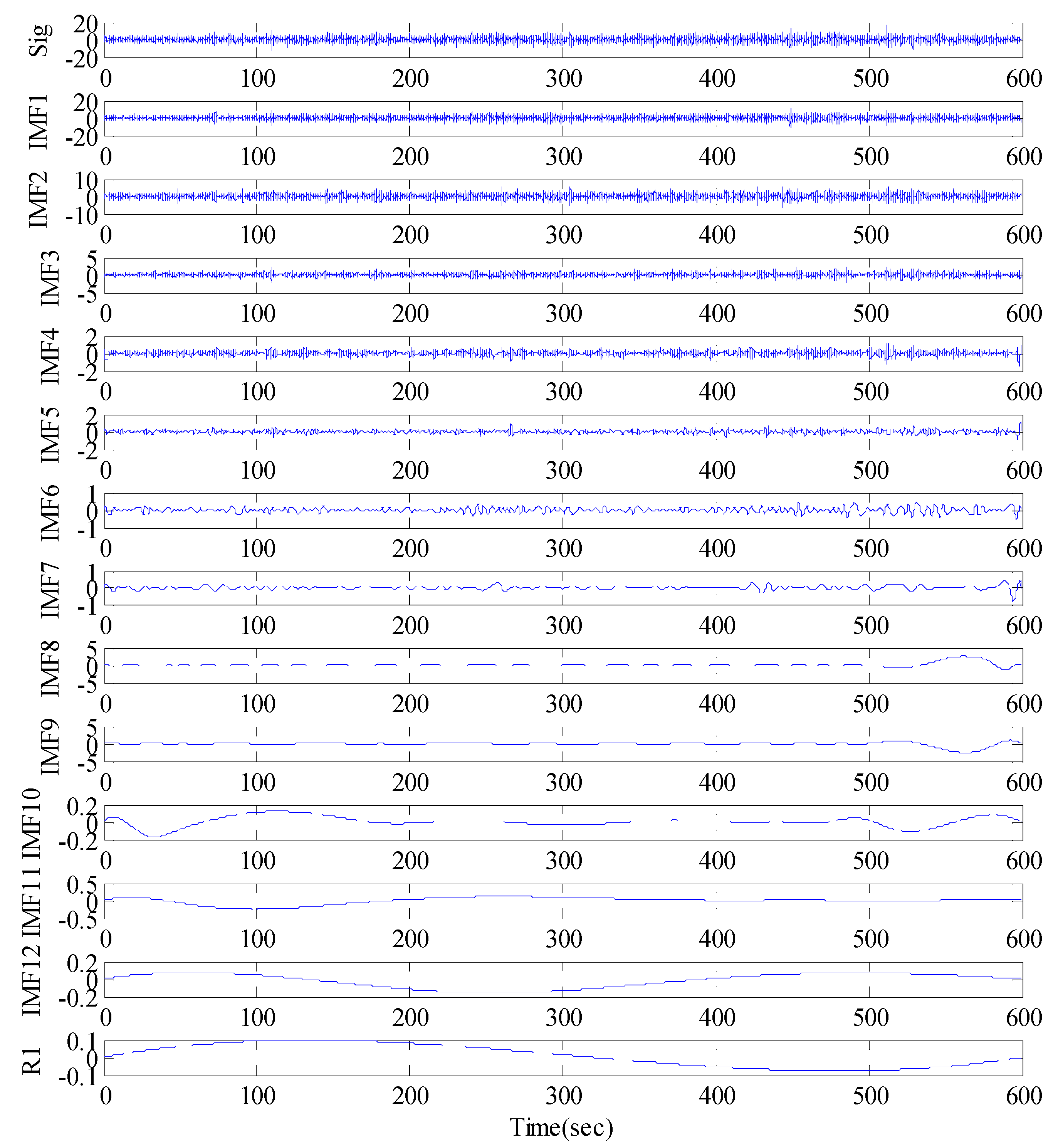
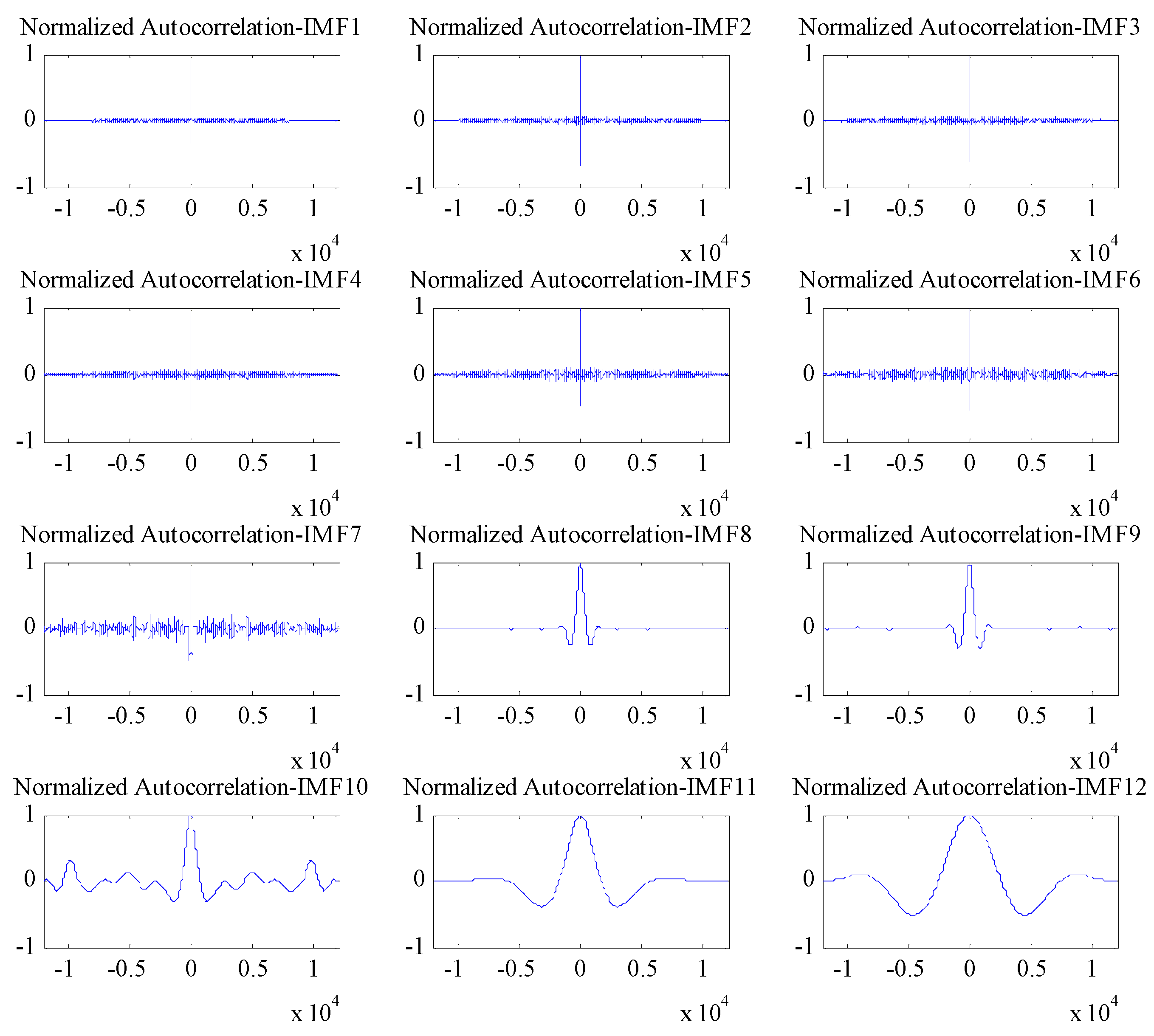
The random noise was weakened by the EMD filter based on the autocorrelation function. First, the EMD of the signal Yi was implemented, obtaining m intrinsic modal functions (IMF1, IMF2,…, IMFm) and one residual component (R1). The autocorrelation function of m IMFs was calculated, and whether these IMFs were noise components was determined. The IMFs that were not noise components and the residual component were reconstructed, obtaining the AFEC-filtered signal .
4. Expanded ARMA_RDT
The program of the time-domain identification technique of modal parameters under ambient excitation included the following steps: (1) the collection of vibration data under ambient excitation; (2) the preprocessing of data samples to make them conform to the signal form necessary for time-domain identification. In this paper, expanded RDT was used to extract free vibration signal data from vibration response signals; (3) Identification of parameters by using free vibration signals as the input data of the time series method of the ARMA model. One advantage of the time-domain identification of modal parameters was that it only uses measured response signals and does not need Fourier transform, thus avoiding truncation-induced signal missing and influences on identification accuracy by side lobe and low resolution.
4.1. Expanded RDT
RDT is a method that extracts free attenuation vibration signals of the system through average and mathematical statistical methods. The traditional RDT focuses mainly on stationary random processes. For a single-degree-of-freedom structural system under excitation by zero-mean stationary Gaussian signals, the traditional RDT chooses one threshold A and intercepts the response signal of the system under random excitations, obtaining signals of
n sections of time sequences starting at
ti (
i = 1, 2, …,
n) and having a length of
s. Subsequently, the signals of these
n sections are superposed and averaged, thus obtaining the free vibration signal of the system. According to theoretical deduction, this vibration signal is the free attenuation signal of the structural system under initial displacement [
21]. When the random excitation meets zero-mean Gaussian distribution, theoretical deduction reveals that this vibration signal is the free attenuation signal of the structural system under initial displacement.
However, external excitations to bridge structures in service are mainly non-stationary random loads. This requires the expansion of the traditional RDT to process zero-mean non-stationary environmental response signals, thereby extracting the free attenuation signal of the multi-degree-of-freedom (MDOF) linear bridge structural system. Under zero-mean non-stationary random loads, the free vibration signal of the MDOF system is collected by RDT. The dynamic differential equation of the MDOF construction structural system can be expressed as:
where
,
and
are the total mass, damping, and stiffness matrixes of the structure, respectively;
,
and
are the displacement, velocity, and acceleration vectors, respectively; and
is the zero-mean non-stationary external load vector.
According to the basic principle of structural dynamics, the displacement response of the
ith DOF in the linear structural system can be expressed as the superposition of multiple modal displacement:
where
is the
r-order mode of vibration;
is the displacement response of the
r-order modal; and
m is number of order of the modal.
can be expressed as the sum of additional free vibration
and forced vibration
of the modal:
where
and
are the inherent frequency and damping ratio of the
r-order modal of the structural system, respectively;
is the damped frequency of the
r-order modal;
is the unit impulse response function of the
r-order modal; and
and
are the initial modal displacement and initial modal velocity of the
r-order modal, respectively.
Given that the unit impulse response will attenuate,
has a finite length. Considering the unilateral properties of the modal load and modal impulse response function, the researchers obtain:
where
p is the length of the modal impulse response function. Replacing
t by
ti +
s yields:
where
A and
B are:
Displacement signals are intercepted and averaged by RDT. Then,
This condition indicates that the problem of calculating the free vibration signal on the
ith DOF (
) can be transformed into the problem of segmented superposition and averaging of different orders of modal displacement responses through modal decomposition of linear structure.
Therefore, the signal gained by RDT under zero-mean non-stationary load can be divided into two parts. The first part is related only to the initial modal displacement and initial modal velocity of the structure, whereas the second part is related to non-stationary external excitation. Given that the mean of F is zero and the variance tends to approach zero with the increase in average times (n) of RDT, the second part of the signal gained by RDT approaches zero when n is large. The second part is viewed as noise. In other words, the signal gained by RDT under non-stationary excitation is a free vibration attenuation signal containing noises.
4.2. ARMA Model
The time series ARMA model is characterized by no energy leakage, strong noise resistance, and high identification accuracy in identifying the modal parameters of structures [
28]. The relationship between N DOF linear system excitation and response can be described by the high-order differential equation
where
,
,
are the mass, damping and stiffness matrix of the system respectively;
,
,
,
are the displacement, velocity, acceleration response vector and excitation force vector of each point of the system.
In the discrete time domain, this high-order differential equation changes into a series of differential equations expressed by time series at different times. Therefore, the ARMA time series model equation is:
where 2
N is number of orders of the regression model and moving average model;
and
are the auto-regression coefficient and moving average coefficient for identification, respectively; and
is the excitation of white noises. When
k = 0,
.
Here
is the white noise. Thus, the correlation function is:
where
is the variance of white noise.
Given that the impulse response function (
) of the linear system is the output response of the system upon the excitation of impulse signal
δ, the expression defined by an ARMA process is:
For an ARMA process,
= 0 when
k is larger than 2
N. Hence, the above equation is equal to zero constantly when
l > 2
N. Then,
Assuming that the length of the correlation function is
L and let
M = 2
N. Corresponding to different
l values, substituting them into the above equation yields a set of equations:
The least square solution of the equation set can be gained by the pseudo-inverse method:
Therefore, the auto-regression coefficient could be calculated.
The coefficient of the moving average model (
) could be solved by using the following nonlinear equation set:
where
is the auto-covariance function of the response sequence
xt.
After
and
are gained, the modal parameters of the system can be calculated by the transmission function of the ARMA model. The transmission function of the ARMA model is:
Roots of the denominator polynomial equation can be calculated by the high-order algebraic equation:
The calculated roots are polar points of the transmission function. Their relationships with modal frequency (
) and damping ratio (
) of the system are:
Based on Equation (24),
and
can be calculated as follows:




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}