
Gravity Compensation Using EGM2008 for High-Precision Long-Term Inertial Navigation Systems


Abstract
:1. Introduction
2. Gravity Disturbance Vector Induced Position Errors
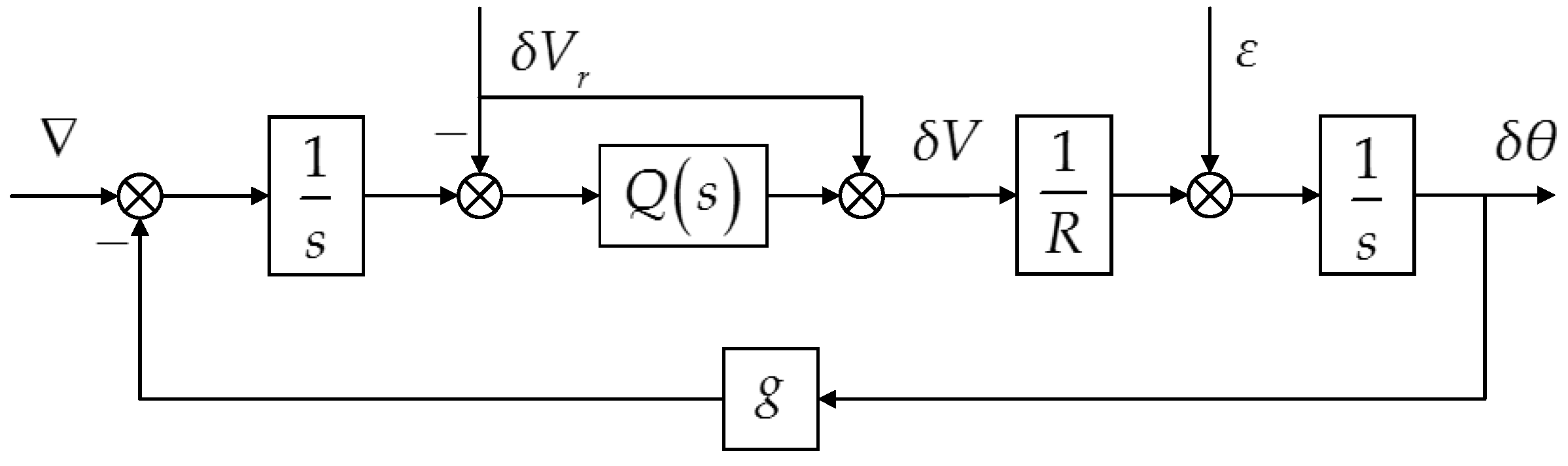
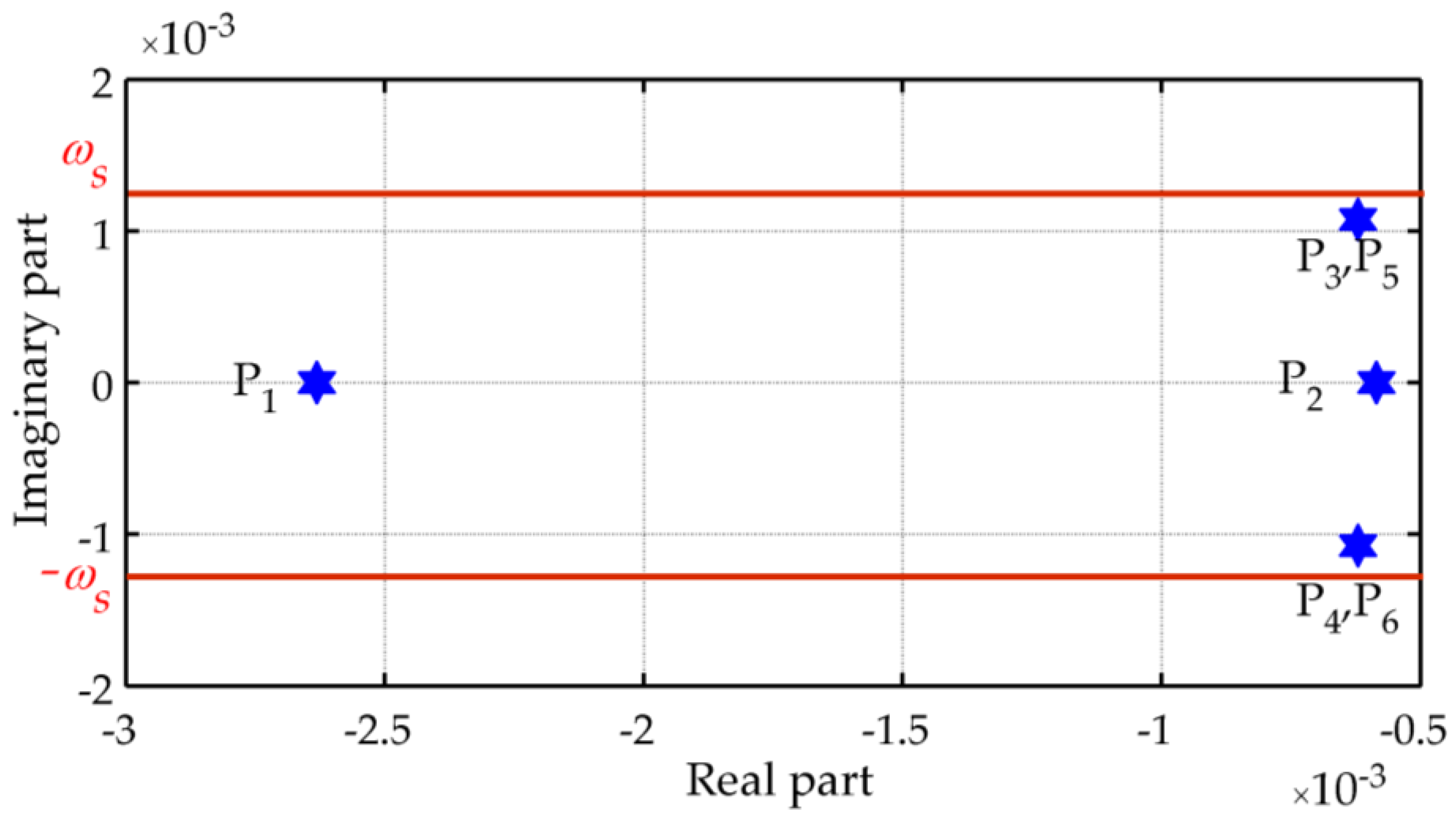
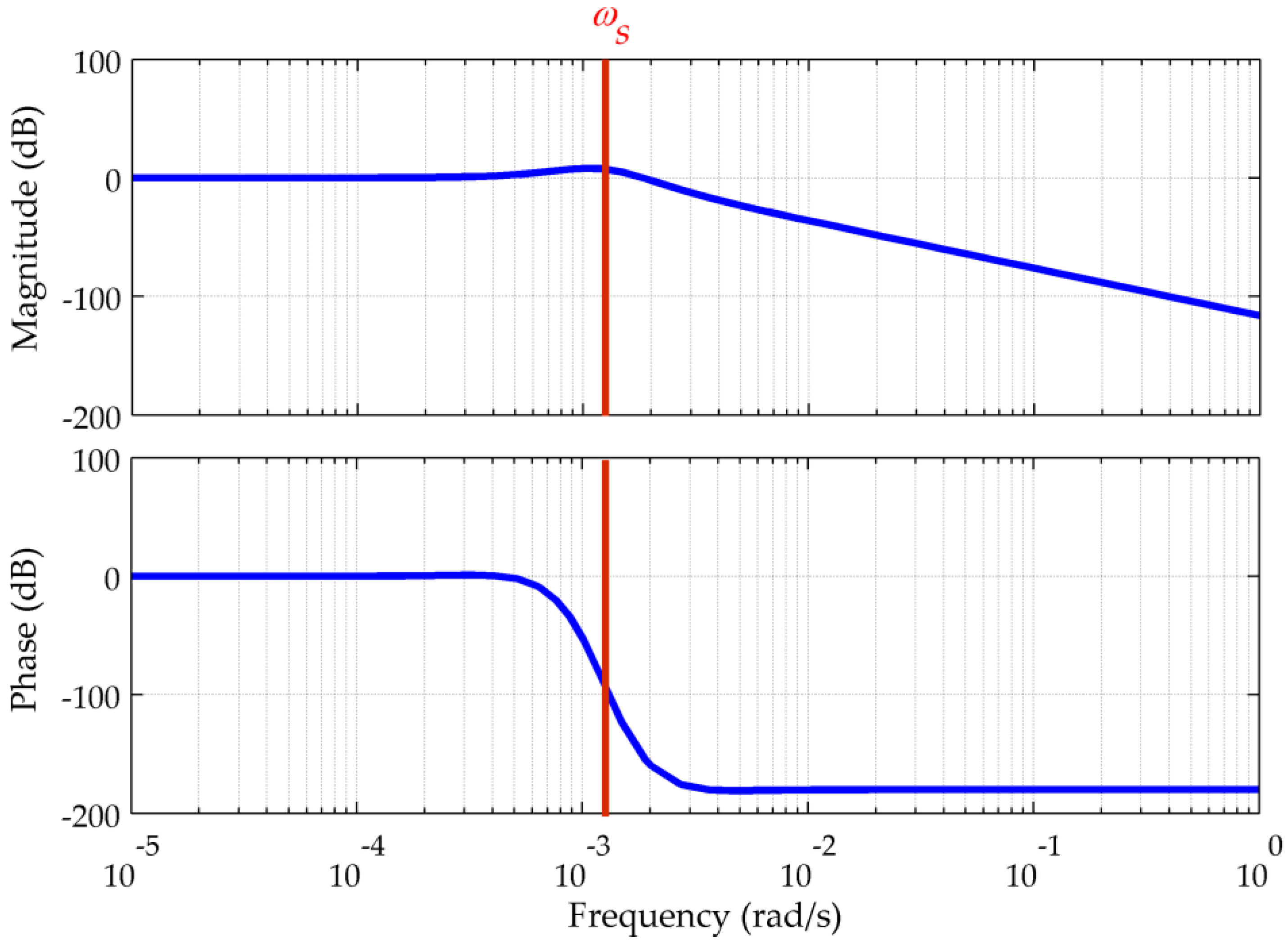
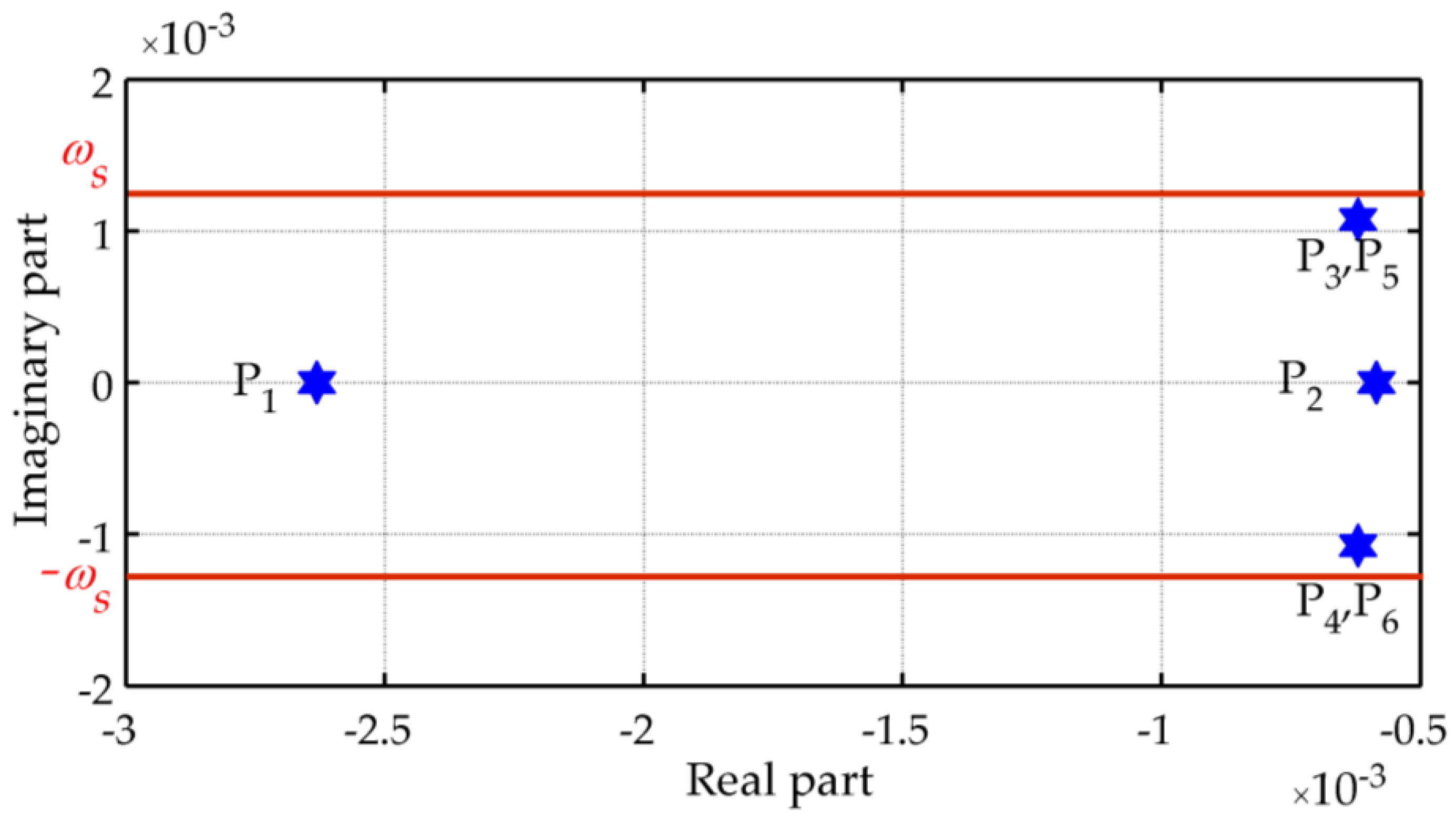
2.1. Error Propagation
2.2. Gravity Disturbance Vector and Its Induced Position Errors
3. Gravity Compensation Using a Spherical Harmonic Model
4. Real-Time Gravity Compensation
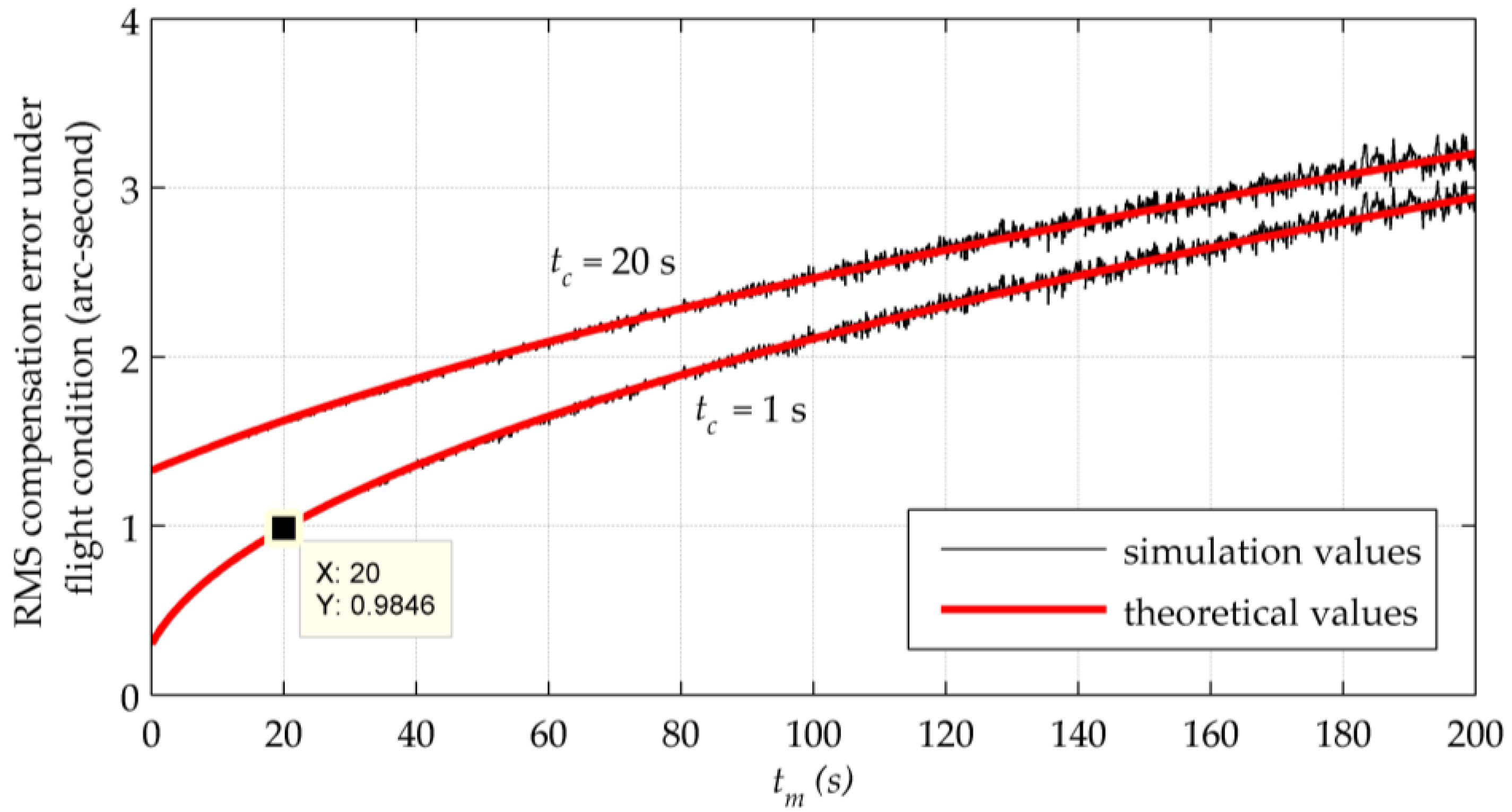
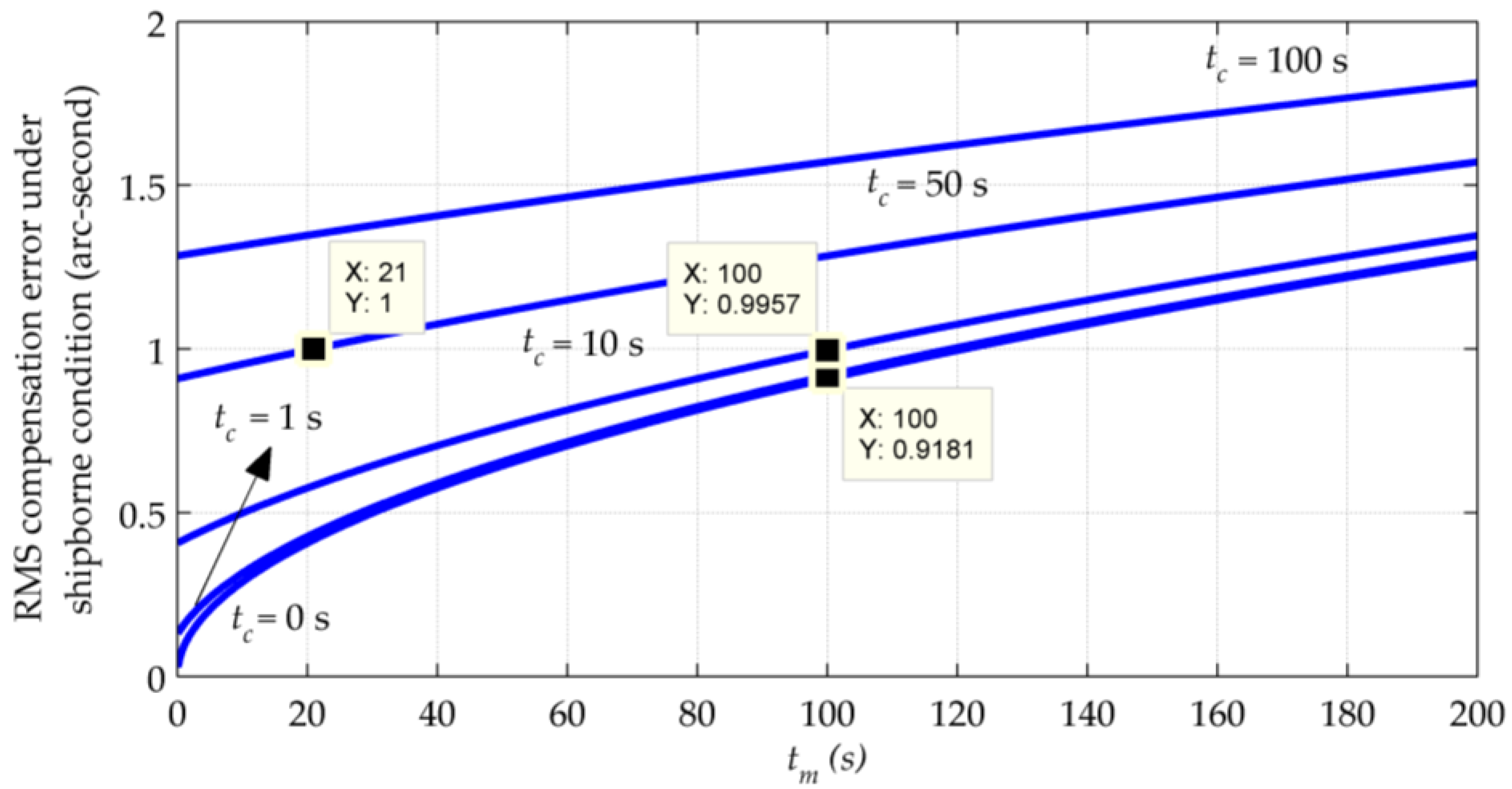
4.1. Time Requirements for Real-Time Compensation
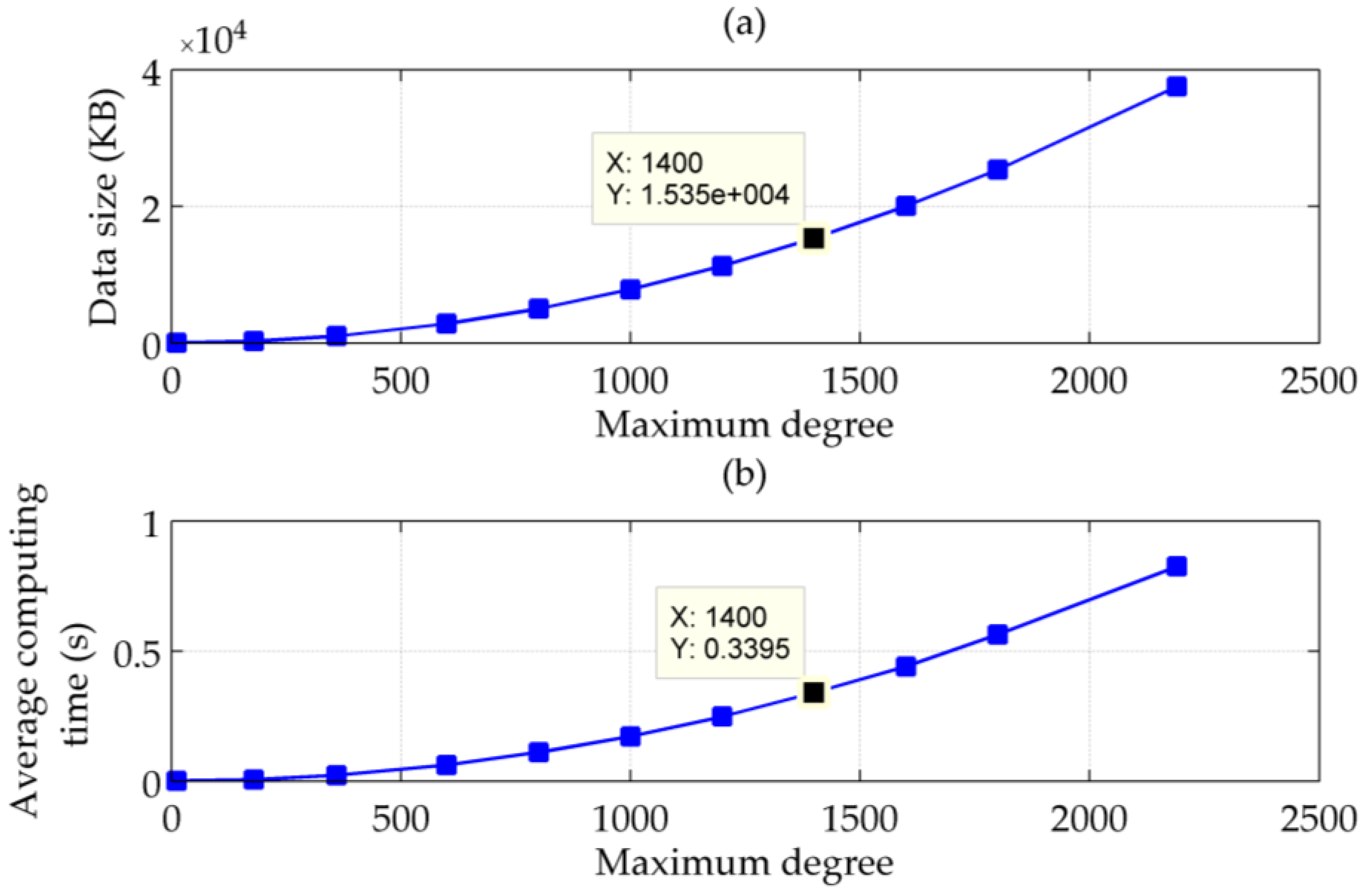
4.2. Improvement of Computation Efficiency
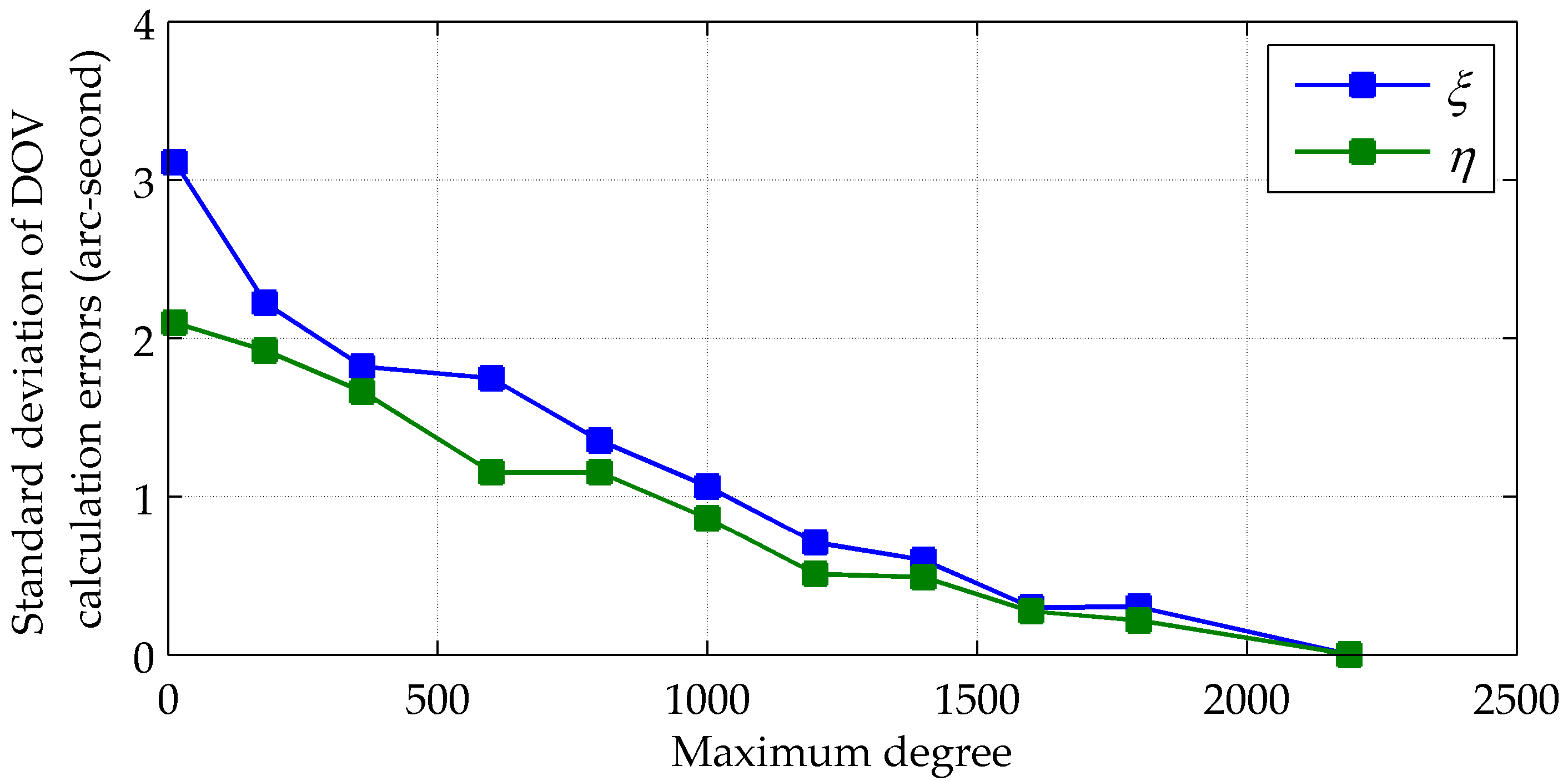
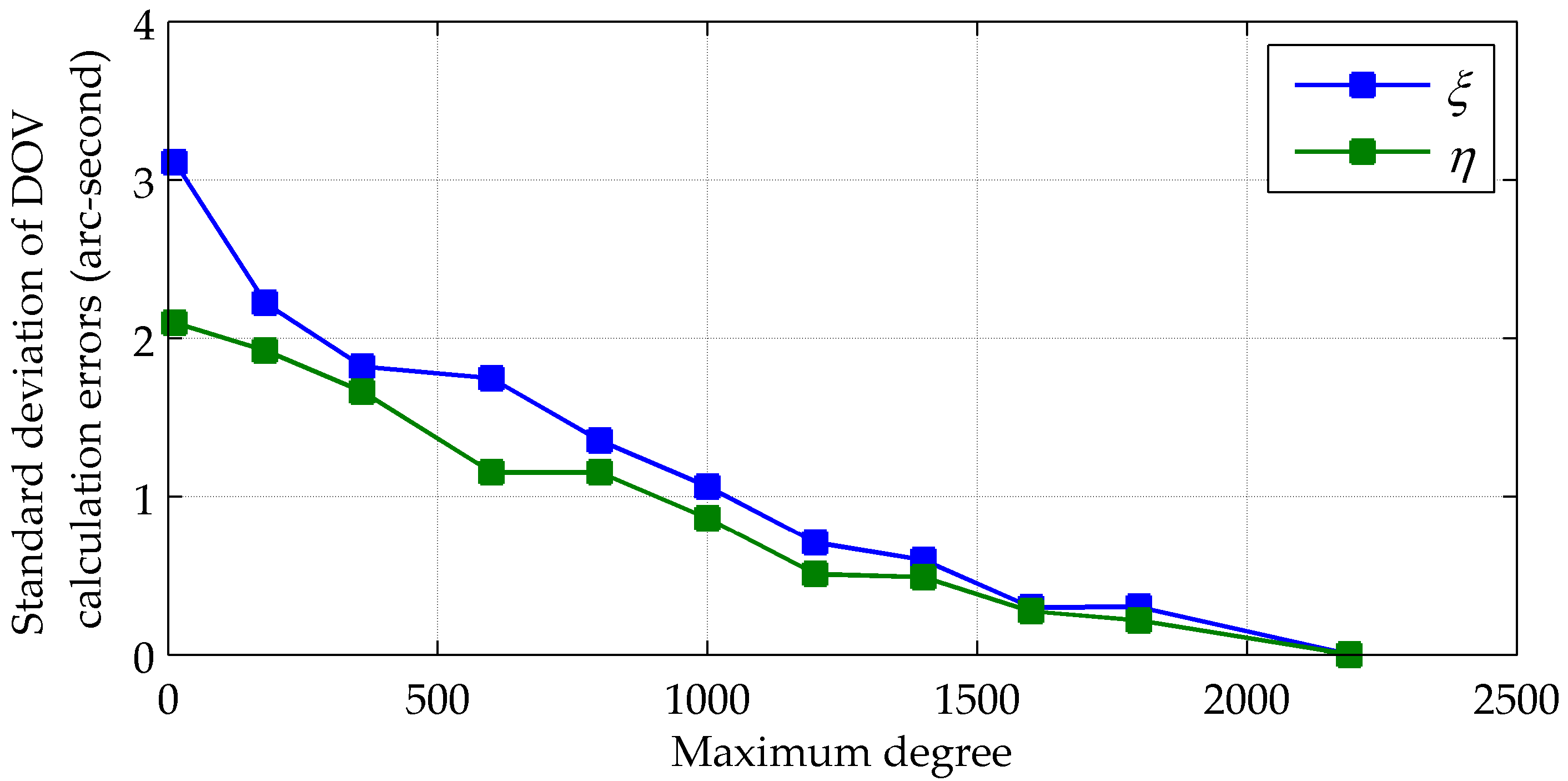
4.3. Compromise between Accuracy and Computing Efficiency
5. The Sea Test of a Shipborne INS
6. Results and Discussion
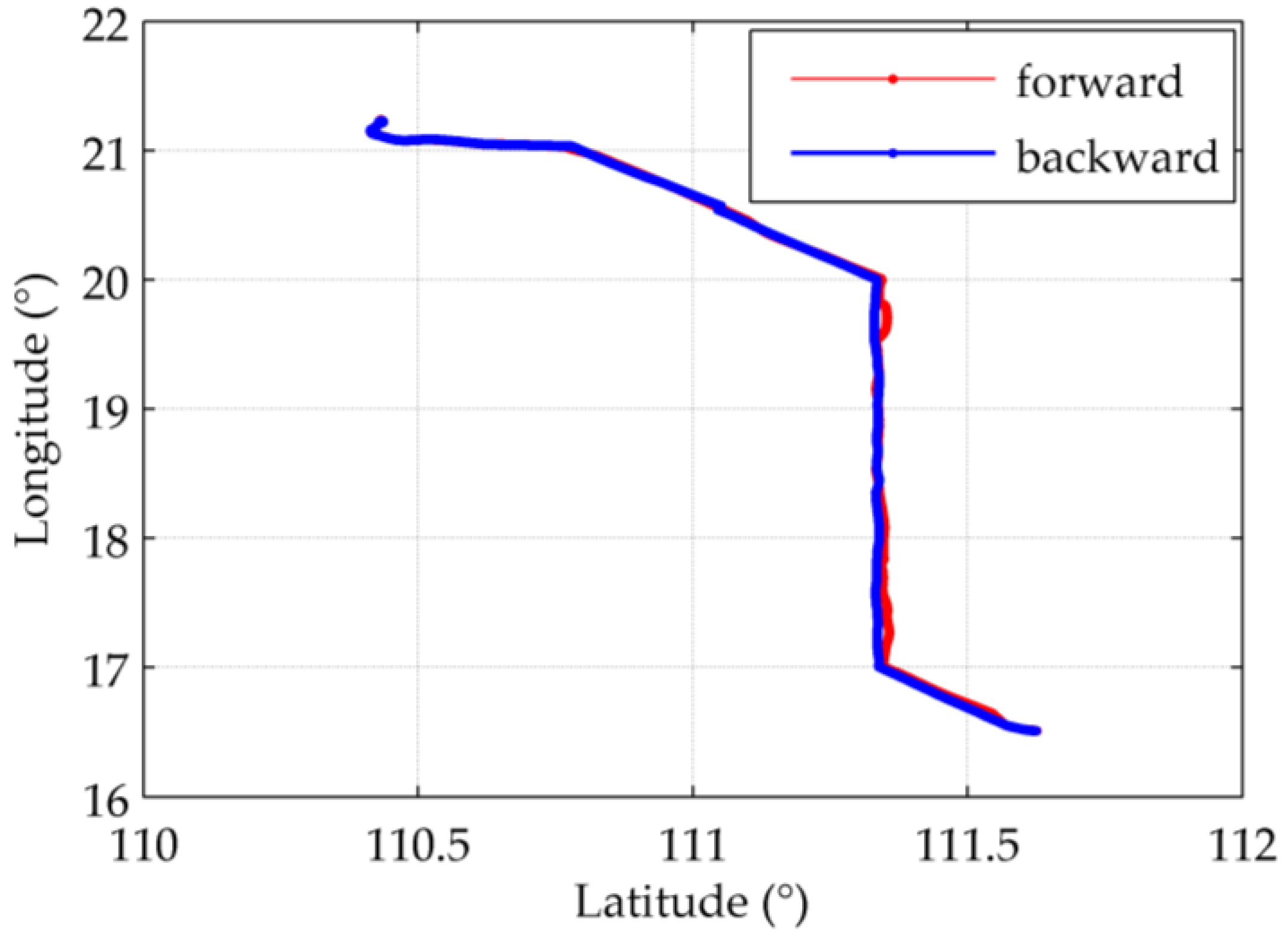
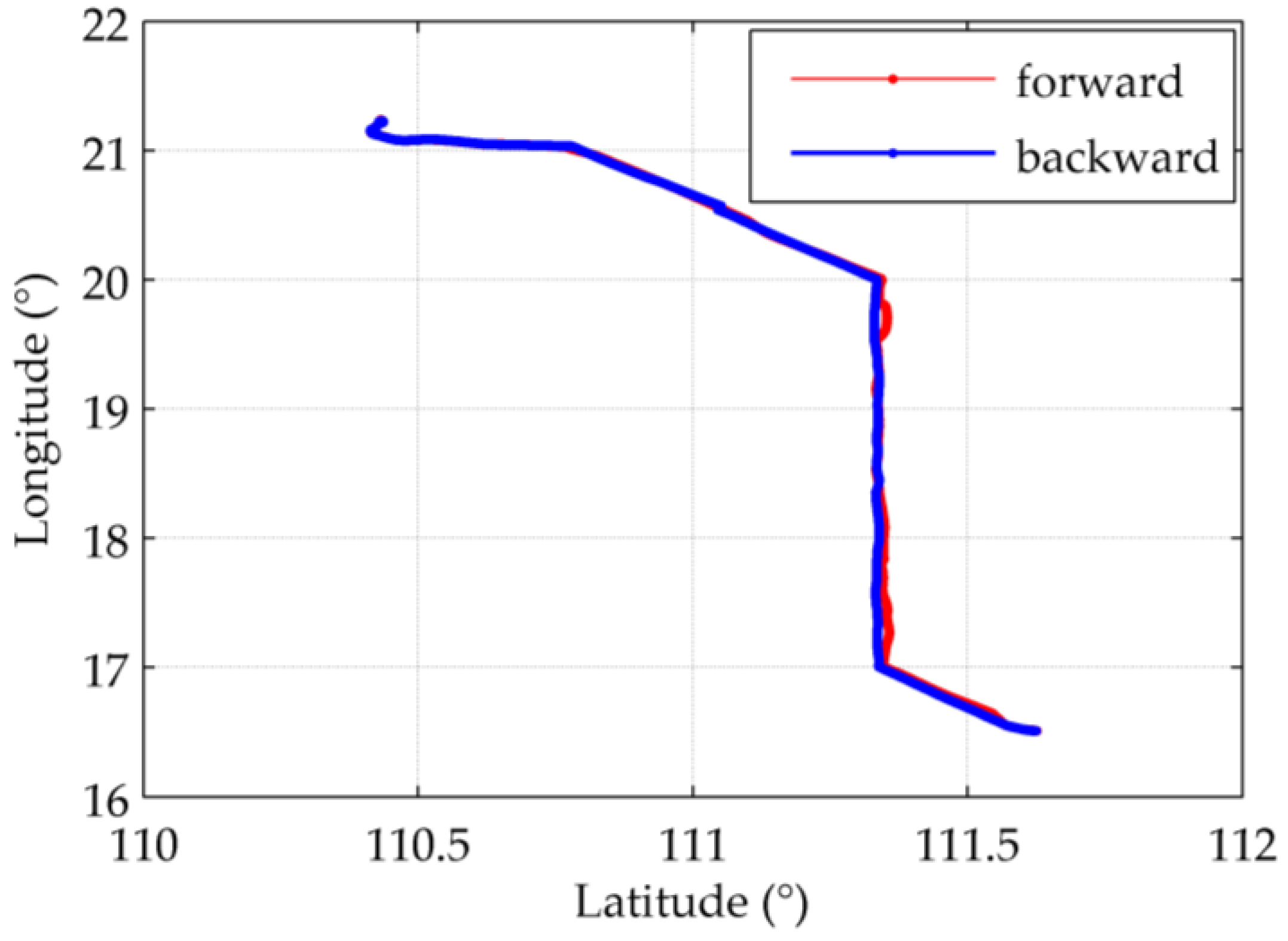
6.1. The Static and the Round-Trip Experiment
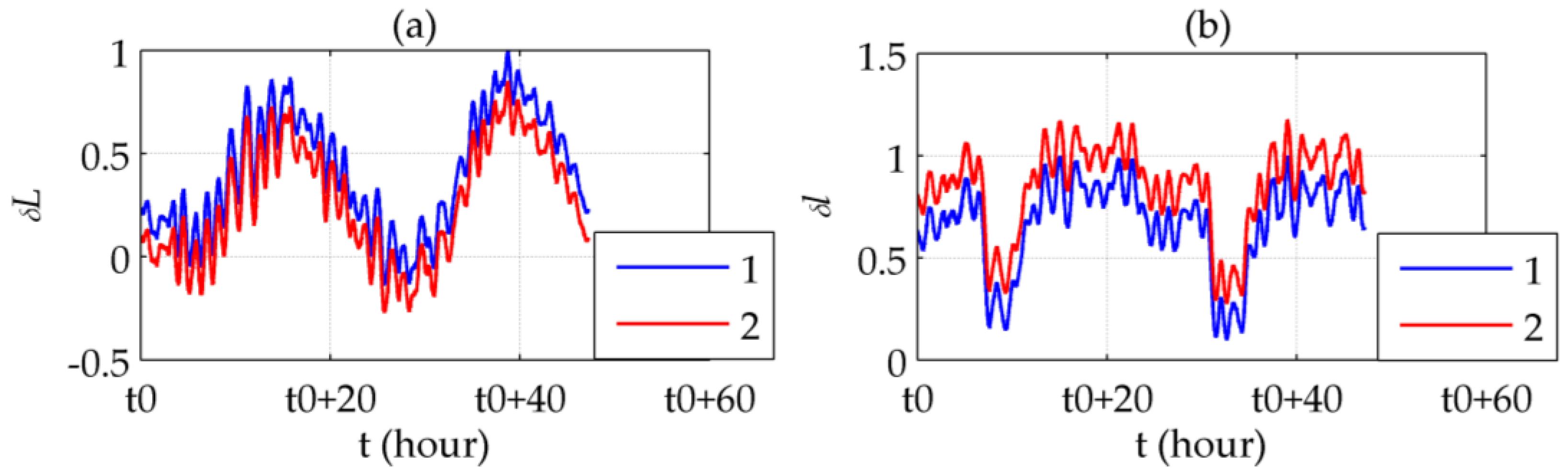
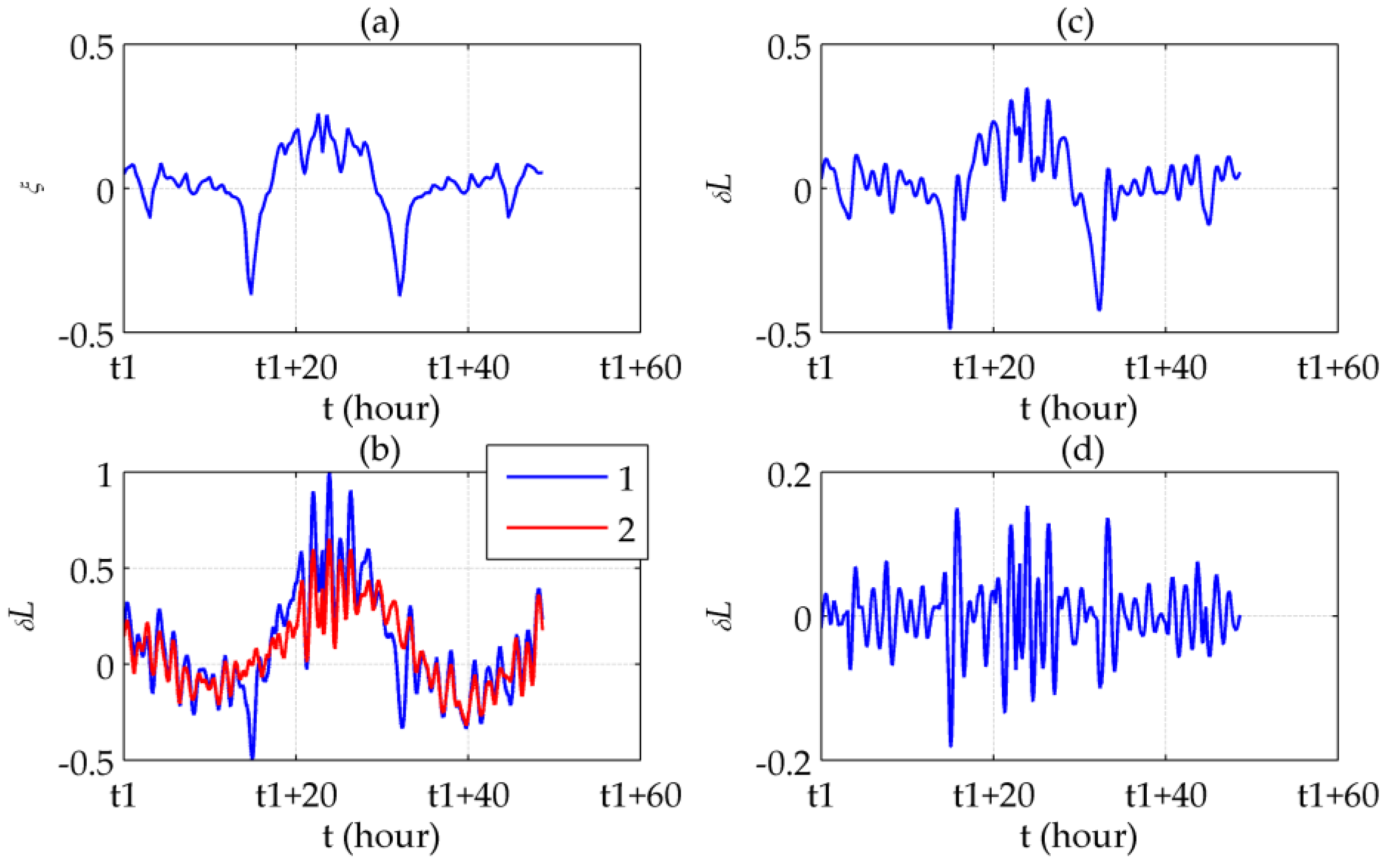
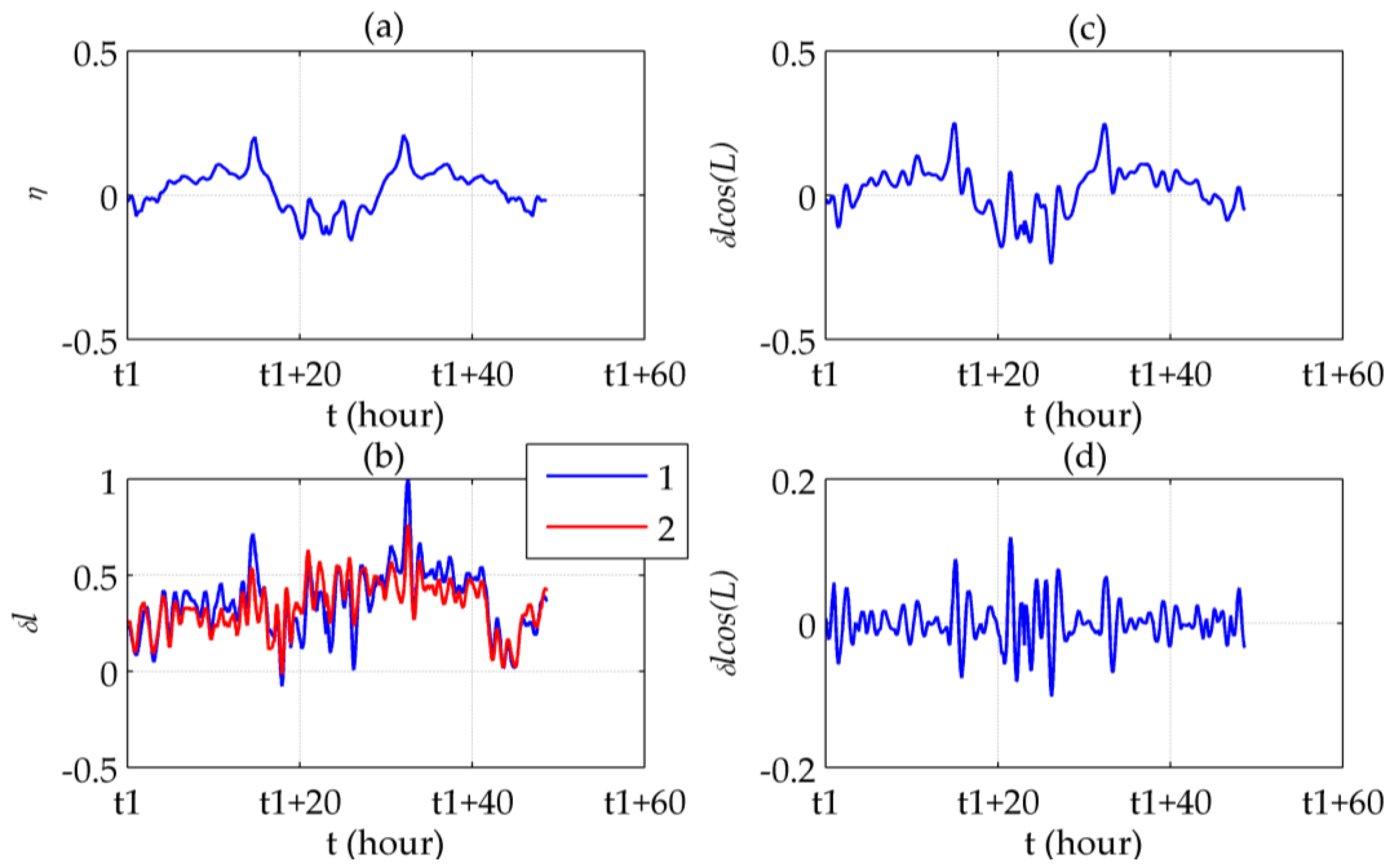
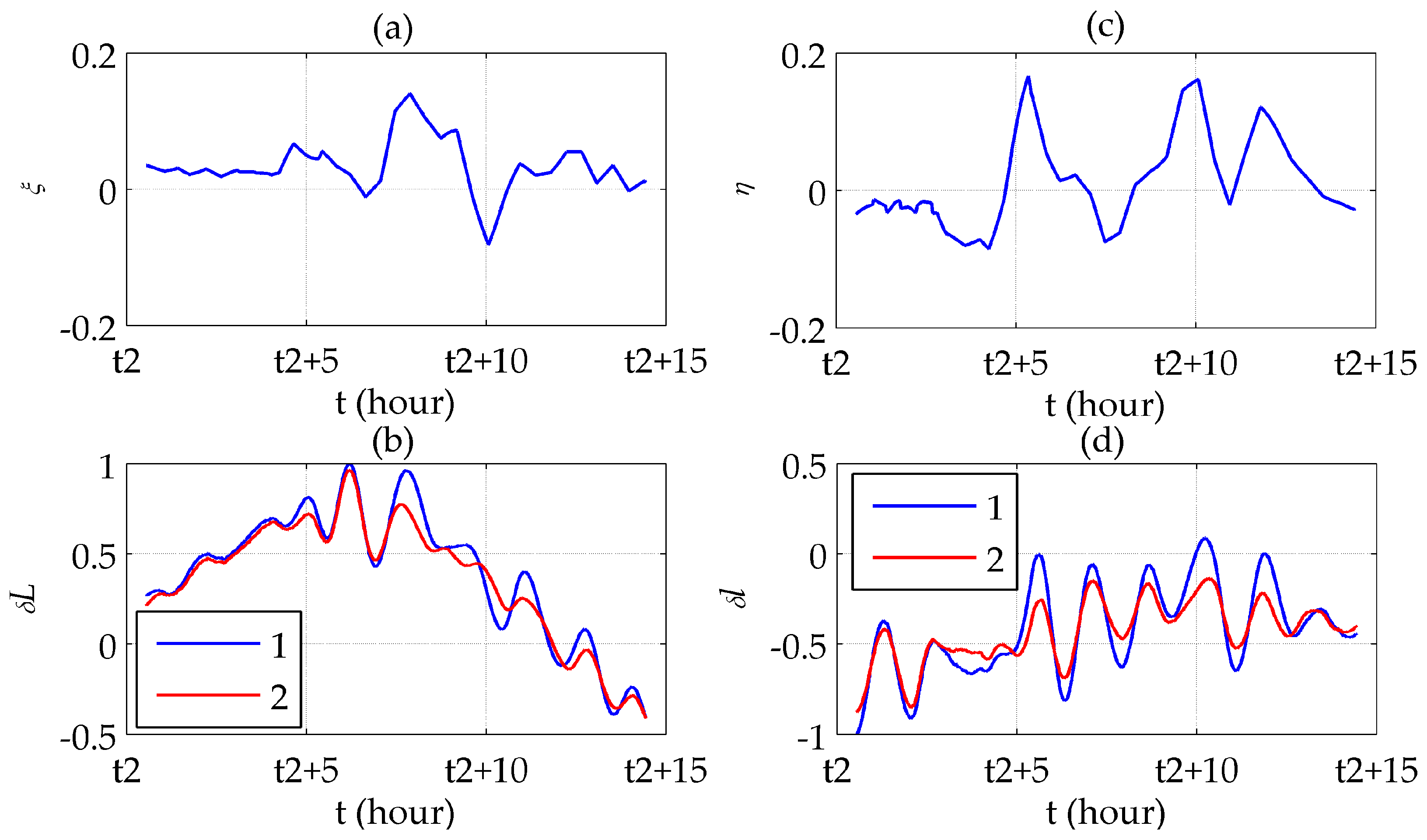
6.2. Dynamic Experiments after a Long-Time Navigation
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Levine, S.A.; Gelb, A. Effect of reflections of the vertical on the performance of a terrestrial inertial navigation system. J. Spacecr. Rockets 1969, 6, 978–984. [Google Scholar]
- Schwarz, K.P. Gravity Induced Position Errors in Airborne Inertial Navigation; The Ohio State University: Columbus, OH, USA, 1981. [Google Scholar]
- Harriman, D.W.; Harrisont, J.C. Gravity-induced errors in airborne inertial navigation. J. Guid. Control Dyn. 1986, 9, 419–426. [Google Scholar]
- Vanderwerf, K. Schuler pumping of inertial velocity errors due to gravity anomalies along a popular North Pacific airway. In Proceedings of the IEEE Position Location and Navigation Symposium, Atlanta, GA, USA, 22–25 April 1996; pp. 642–648.
- Dai, D.; Wang, X.; Zhan, D.; Huang, Z.; Xiong, H. An improved method for Gravity disturbances compensation in INS/GPS integrated navigation. In Proceedings of the 12th International Conference on Signal Processing (ICSP), Hangzhou, China, 19–23 October 2014; pp. 148–153.
- Hu, P.; Gao, Z.; She, Y.; Cai, L.; Han, F. Shipborne heading determination and error compensation based on a dynamic baseline. GPS Solut. 2015, 19, 403–410. [Google Scholar] [CrossRef]
- Grejner-Brzezinska, D.; Yi, Y.; Toth, C. On improved gravity modelingg supporting direct georeferenceing of multisensor systems. Proc. Int. Soc. Photogramm. Remote Sens. 2004, XXXV, 908–913. [Google Scholar]
- Jekeli, C. Airborne vector gravimetry using precise, position-aided inertial measurement units. Bull. Geod. 1994, 69, 1–11. [Google Scholar] [CrossRef]
- Leonard, J.M.; Nievinski, F.G.; Born, G.H. Gravity error compensation using second-order Gauss-Markov processes. J. Spacecr. Rockets 2013, 50, 217–229. [Google Scholar] [CrossRef]
- Jordan, S.K. Self-Consistent statistical models for the gravity anomaly, vertical deflections, and undulation of the geoid. J. Geophys. Res. 1972, 77, 3660–3670. [Google Scholar] [CrossRef]
- Jekeli, C. Precision free-inertial navigation with gravity compensation by an onboard gradiometer. J. Guid. Control Dyn. 2006, 29, 704–713. [Google Scholar] [CrossRef]
- Heller, W.G.; Jordant, S.K. Error analysis of two new gradiometer-aided inertial navigation systems. J. Spacecr. Rockets 1976, 13, 340–347. [Google Scholar] [CrossRef]
- Kwon, J.H.; Jekeli, C. Gravity requirements for compensation of ultra-precise inertial navigation. J. Navig. 2005, 58, 479–492. [Google Scholar] [CrossRef]
- Hirt, C.; Claessens, S.; Fecher, T.; Kuhn, M.; Pail, R.; Rexer, M. New ultrahigh-resolution picture of Earth’s gravity field. Geophys. Res. Lett. 2013, 40, 4279–4283. [Google Scholar] [CrossRef]
- Jekeli, C.; Lee, J.K.; Kwon, J.H. Modeling errors in upward continuation for INS gravity compensation. J. Geod. 2007, 81, 297–309. [Google Scholar] [CrossRef]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. The development and evaluation of the Earth Gravitational Model 2008 (EGM2008). J. Geophys. Res. Solid Earth 2012, 117, 1–38. [Google Scholar] [CrossRef]
- Hirt, C.; Marti, U.; Bürki, B.; Featherstone, W.E. Assessment of EGM2008 in Europe using accurate astrogeodetic vertical deflections and omission error estimates from SRTM/DTM2006.0 residual terrain model data. J. Geophys. Res. 2010, 115. [Google Scholar] [CrossRef]
- Fu, G.Y.; Zhu, Y.Q.; Gao, S.H.; Liang, W.F.; Jin, H.L.; Yang, G.L.; Zhou, X.; Guo, S.S.; Xu, Y.M.; Du, W.J. Discrepancies between free air gravity anomalies from EGM2008 and the ones from dense gravity/GPS observations at west Sichuan Basin. Chin. J. Geophys. 2013, 56, 3761–3769. (In Chinese) [Google Scholar]
- Abeho, D.R.; Hipkin, R.; Tulu, B.B. Evaluation of EGM2008 by means of GPS levelling Uganda. S. Afr. J. Geomat. 2014, 3, 272–284. [Google Scholar] [CrossRef]
- Abeyratne, P.G.V.; Featherstone, W.E.; Tantrigoda, D.A. Assessment of EGM2008 over Sri Lanka, an area where “fill-in” data were used in EGM2008. Newton Bull. 2009, 4, 284–316. [Google Scholar]
- Dawod, G.; Mohamed, H.; Ismail, S. Evaluation and adaptation of the EGM2008 geopotential model along the Northern Nile Valley, Egypt: Case study. J. Surv. Eng. 2009, 136, 36–40. [Google Scholar] [CrossRef]
- Jekeli, C. Gravity on precise, short-term, 3-D free-inertial navigation. Navigation 1997, 44, 347–357. [Google Scholar] [CrossRef]
- Wang, J.; Yang, G.; Li, X.; Cheng, J. Research on time interval of gravity compensation for airborne INS. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 5442–5446.
- Wang, J.; Yang, G.; Li, J.; Zhou, X. An Online Gravity Modeling Method Applied for High Precision Free-INS. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Yang, G.; Li, X.; Zhou, X. Application of the spherical harmonic gravity model in high precision inertial navigation systems. Meas. Sci. Technol. 2016, 27, 95103. [Google Scholar] [CrossRef]
- He, Q.; Gao, Z.; Wu, Q.; Fu, W. Design of horizontal damping network for INS based on complementary filtering. J. Chin. Inert. Technol. 2012, 20, 157–161. (In Chinese) [Google Scholar]
- Hofmann-Wellenhof, B.; Moritz, H. Physical Geodesy; Springer Science & Business Media: Berlin, Germany, 2006. [Google Scholar]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. An Earth Gravitational Model to Degree 2160: EGM2008. In Proceedings of the European Geosciences Union General Assembly 2008, Vienna, Austria, 13–18 April 2008; Volume 84.
- Holmes, S.A.; Featherstone, W.E. A unified approach to the Clenshaw summation and the recursive computation of very high degree and order normalised associated Legendre functions. J. Geod. 2002, 76, 279–299. [Google Scholar] [CrossRef]
- Wang, J.; Yang, G.; Li, X.; Zhou, X. Error indicator analysis for gravity disturbing vector’s influence on inertial navigation system. J. Chin. Inert. Technol. 2016, 24, 285–290. (In Chinese) [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | II-1 | II-2 | II-3 | II-4 | II-5 | II-6 | II-7 |
|---|---|---|---|---|---|---|---|
| Time span (h) | 7.22 | 10.28 | 10.55 | 6.66 | 13.88 | 7.22 | 7.50 |
| Latitude scope () | 13.15~14.65 | 10.07~10.44 | 9.80~10.21 | 9.60~9.85 | 13.41~15.51 | 13.96~15.10 | 14.05~15.16 |
| Longitude scope () | 115.52~115.61 | 114.21~115.34 | 114.23~115.54 | 114.64~115.53 | 112.33~112.52 | 112.35~112.44 | 112.30~112.43 |
| Uncompensated SSE | 62.01 | 65.95 | 92.88 | 33.06 | 78.33 | 36.52 | 39.25 |
| Compensated SSE | 12.41 | 26.57 | 49.09 | 13.49 | 34.27 | 9.66 | 19.19 |
| Uncompensated SSE | 34.89 | 75.69 | 367.66 | 384.84 | 187.18 | 236.06 | 58.58 |
| Compensated SSE | 20.65 | 33.21 | 157.40 | 99.80 | 66.22 | 81.99 | 15.88 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, R.; Wu, Q.; Han, F.; Liu, T.; Hu, P.; Li, H. Gravity Compensation Using EGM2008 for High-Precision Long-Term Inertial Navigation Systems. Sensors 2016, 16, 2177. https://doi.org/10.3390/s16122177
Wu R, Wu Q, Han F, Liu T, Hu P, Li H. Gravity Compensation Using EGM2008 for High-Precision Long-Term Inertial Navigation Systems. Sensors. 2016; 16(12):2177. https://doi.org/10.3390/s16122177
Chicago/Turabian StyleWu, Ruonan, Qiuping Wu, Fengtian Han, Tianyi Liu, Peida Hu, and Haixia Li. 2016. "Gravity Compensation Using EGM2008 for High-Precision Long-Term Inertial Navigation Systems" Sensors 16, no. 12: 2177. https://doi.org/10.3390/s16122177
APA StyleWu, R., Wu, Q., Han, F., Liu, T., Hu, P., & Li, H. (2016). Gravity Compensation Using EGM2008 for High-Precision Long-Term Inertial Navigation Systems. Sensors, 16(12), 2177. https://doi.org/10.3390/s16122177