
NLOS Correction/Exclusion for GNSS Measurement Using RAIM and City Building Models


Abstract
:
1. Introduction
2. Related Works
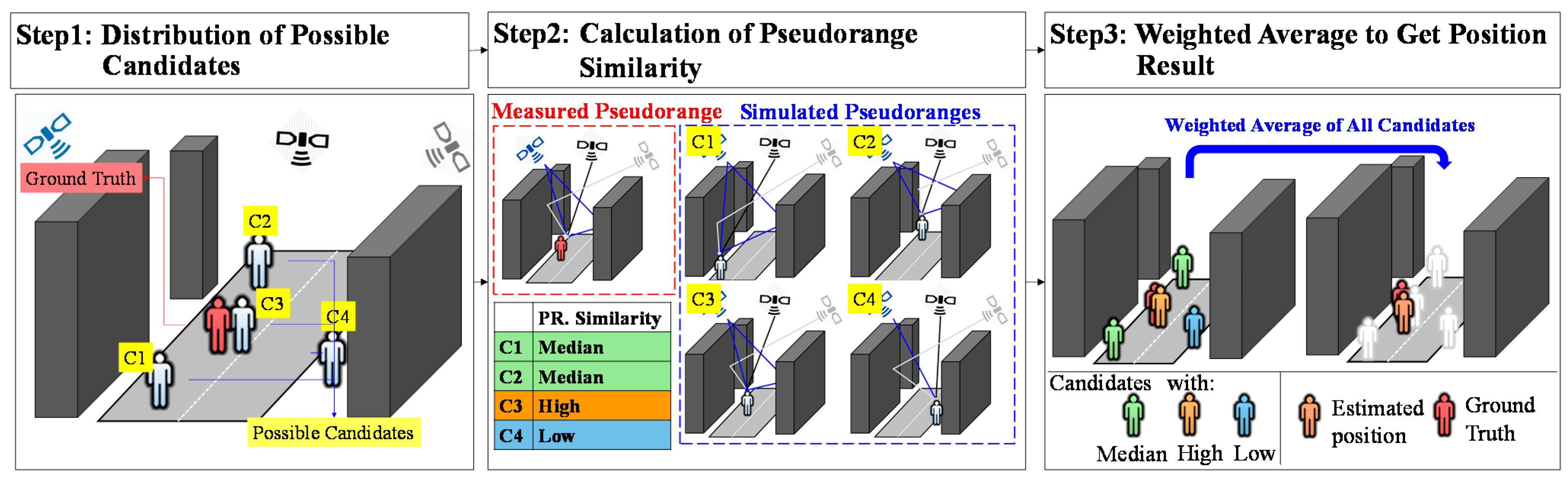
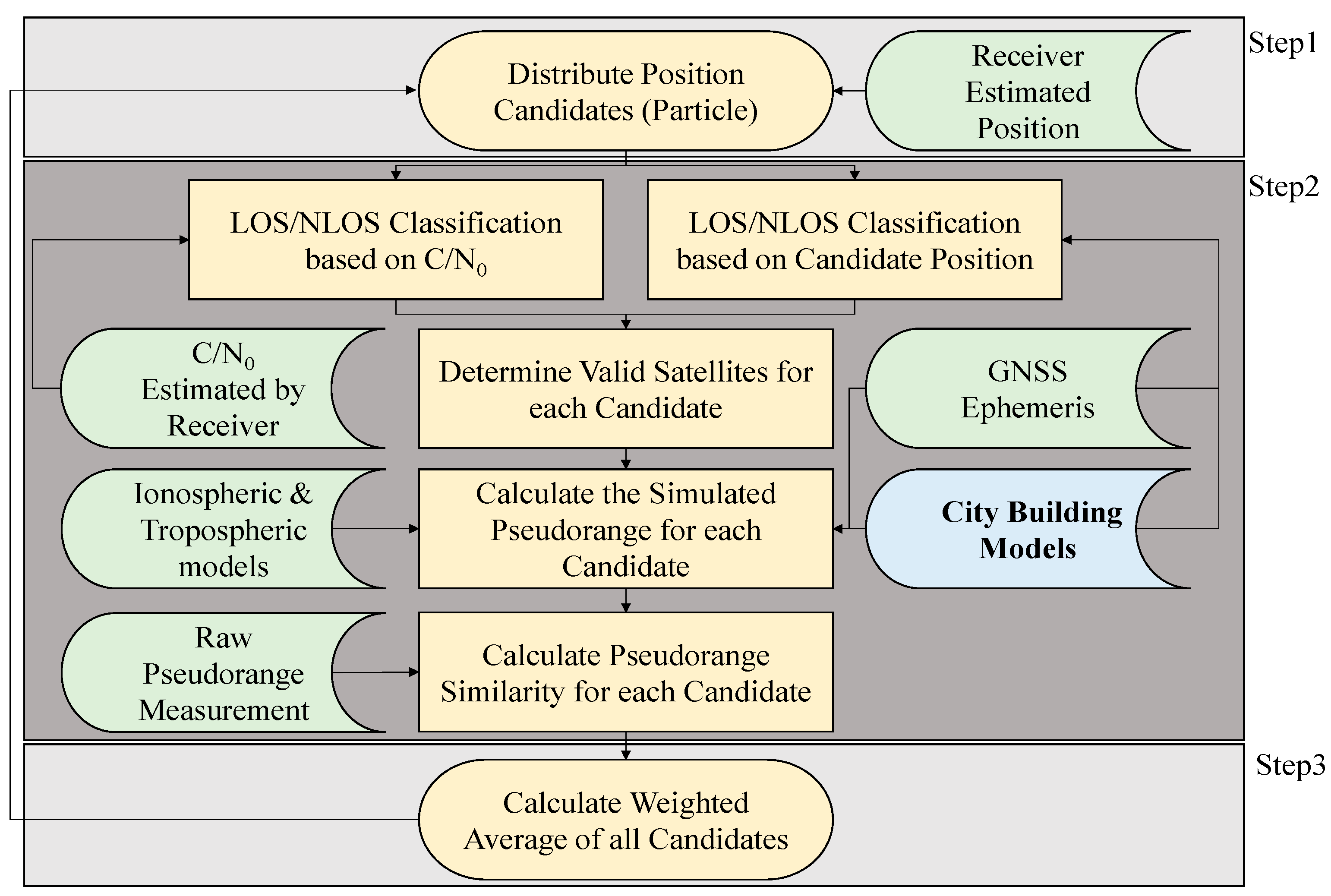
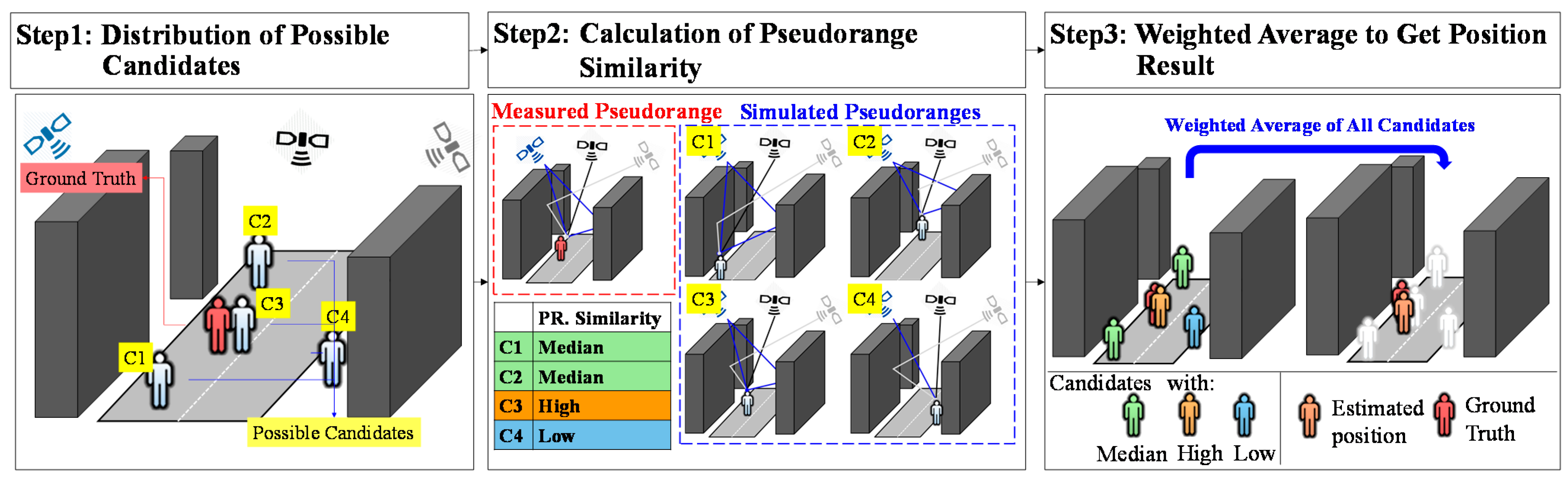
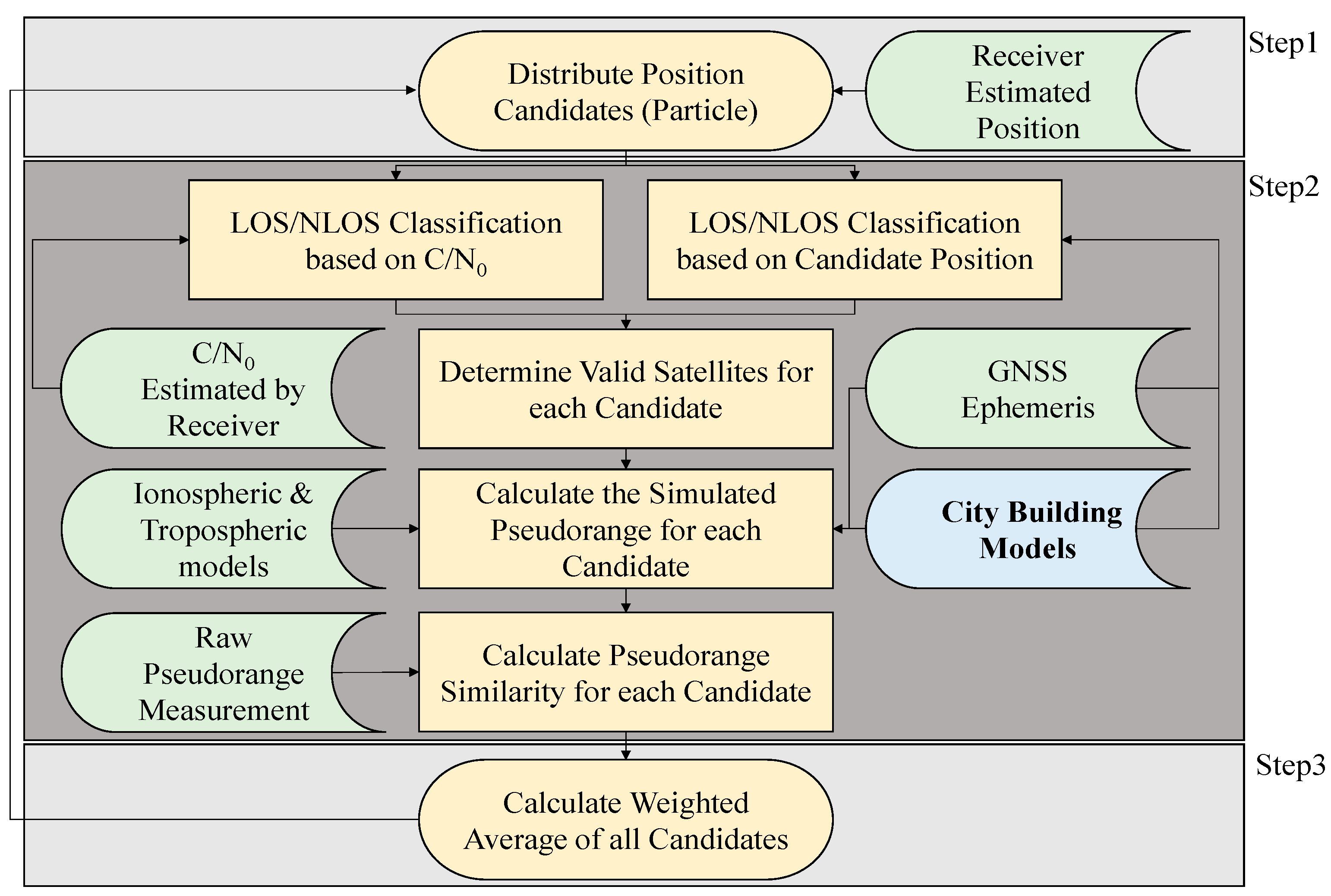
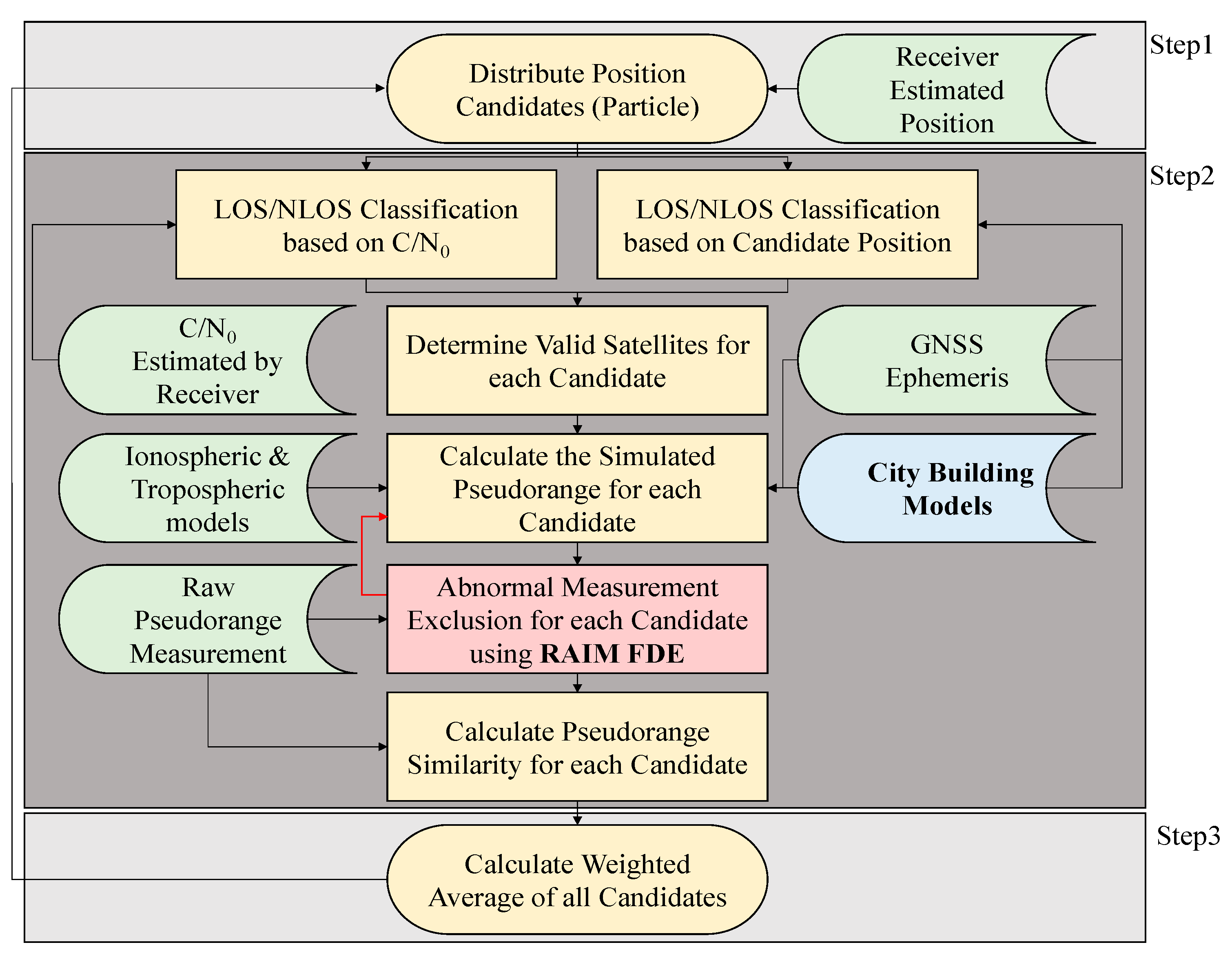
3. 3D Building Model Based Positioning Method

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
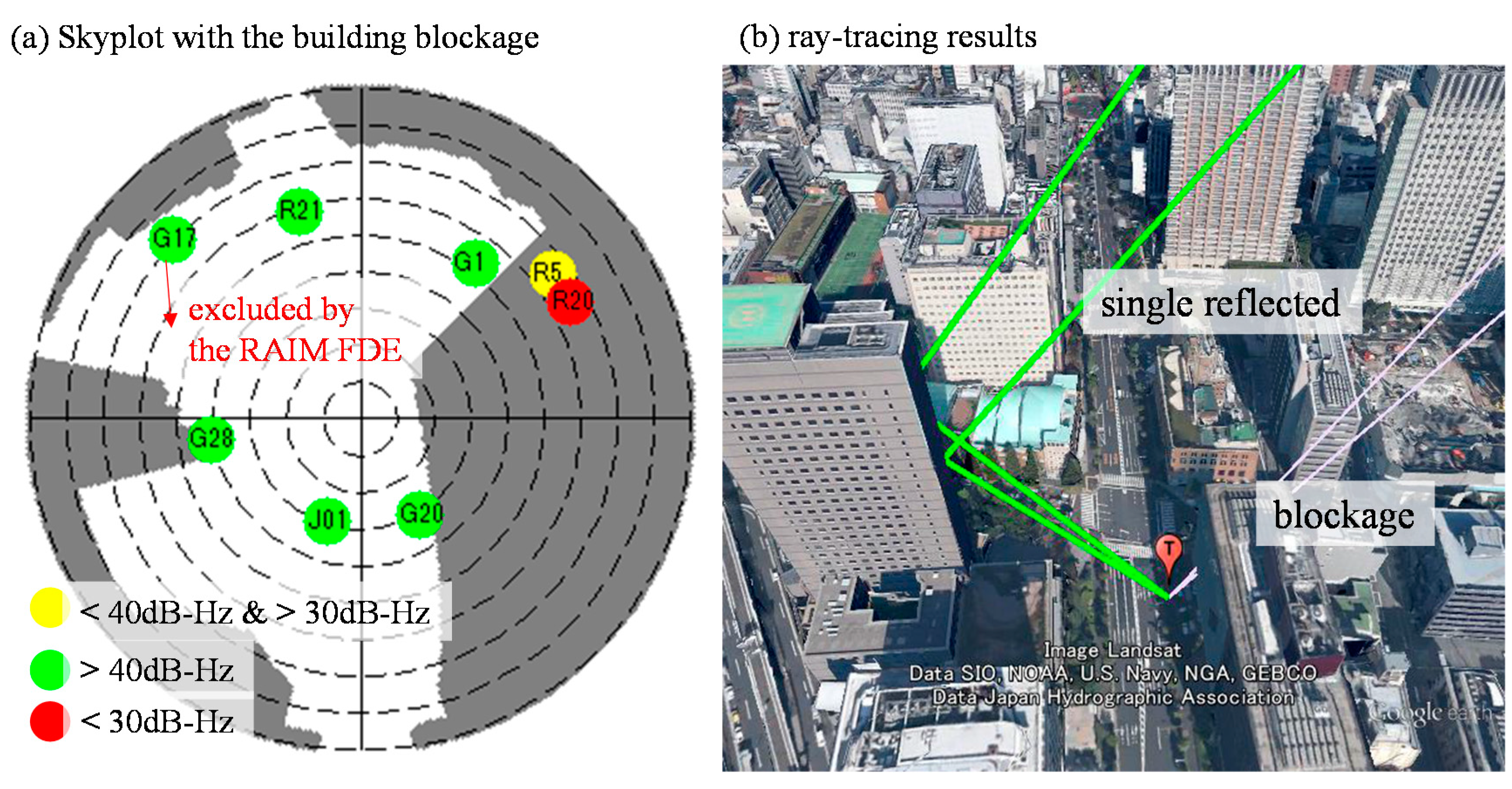
| Signal Strength (C/N0) | Ray-Tracing | Valid Satellite Type |
|---|---|---|
| LOS (>40 dB-Hz) | LOS | LOS |
| NLOS (<30 dB-Hz) | NLOS | NLOS |
| LOS (>40 dB-Hz) | NLOS | Invalid |
| NLOS (<30 dB-Hz) | LOS | Invalid |
| Unknown (30 dB-Hz < C/N0 < 40 dB-Hz) | LOS | Multipath (LOS if no reflection path is found) |
| Unknown (30 dB-Hz < C/N0 < 40 dB-Hz) | NLOS | NLOS |
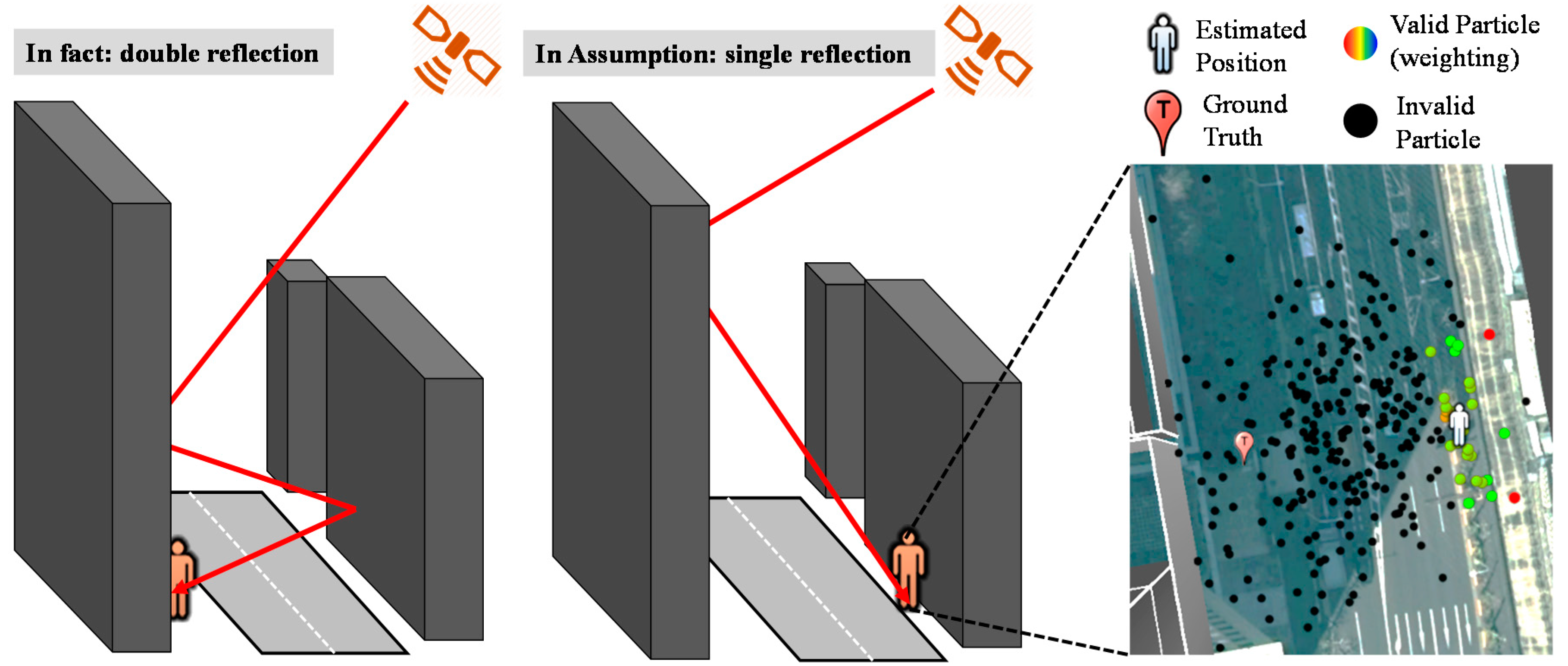
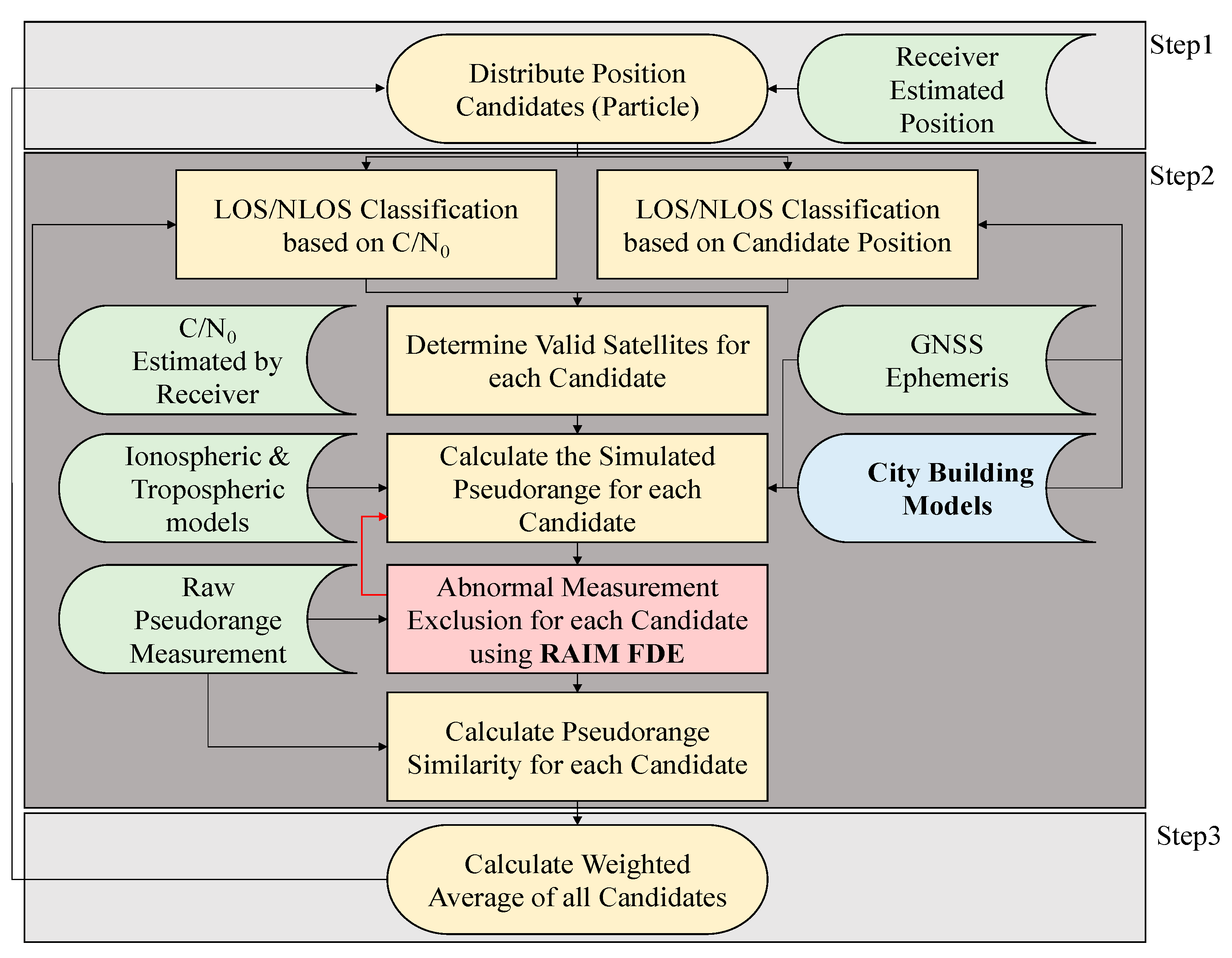
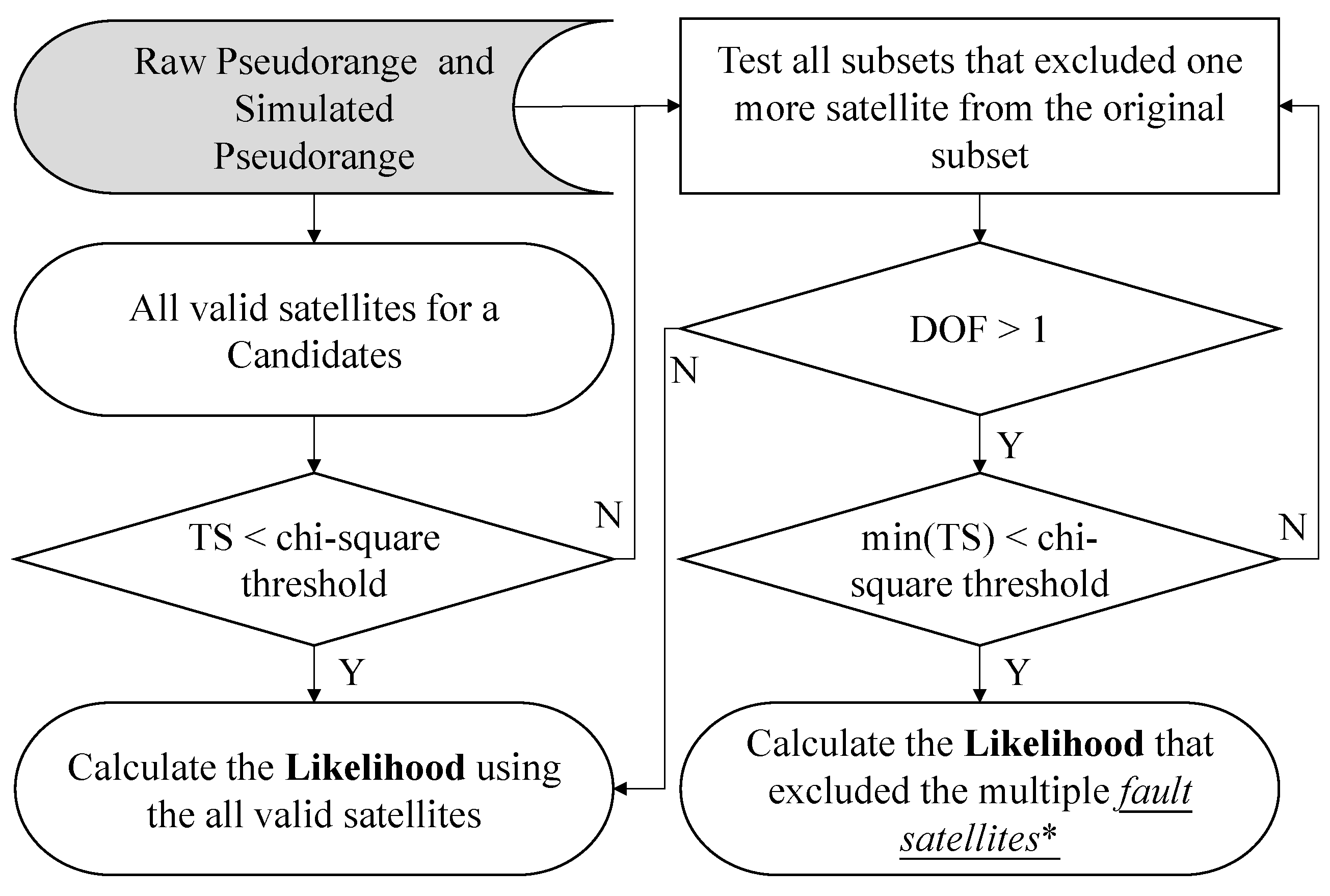
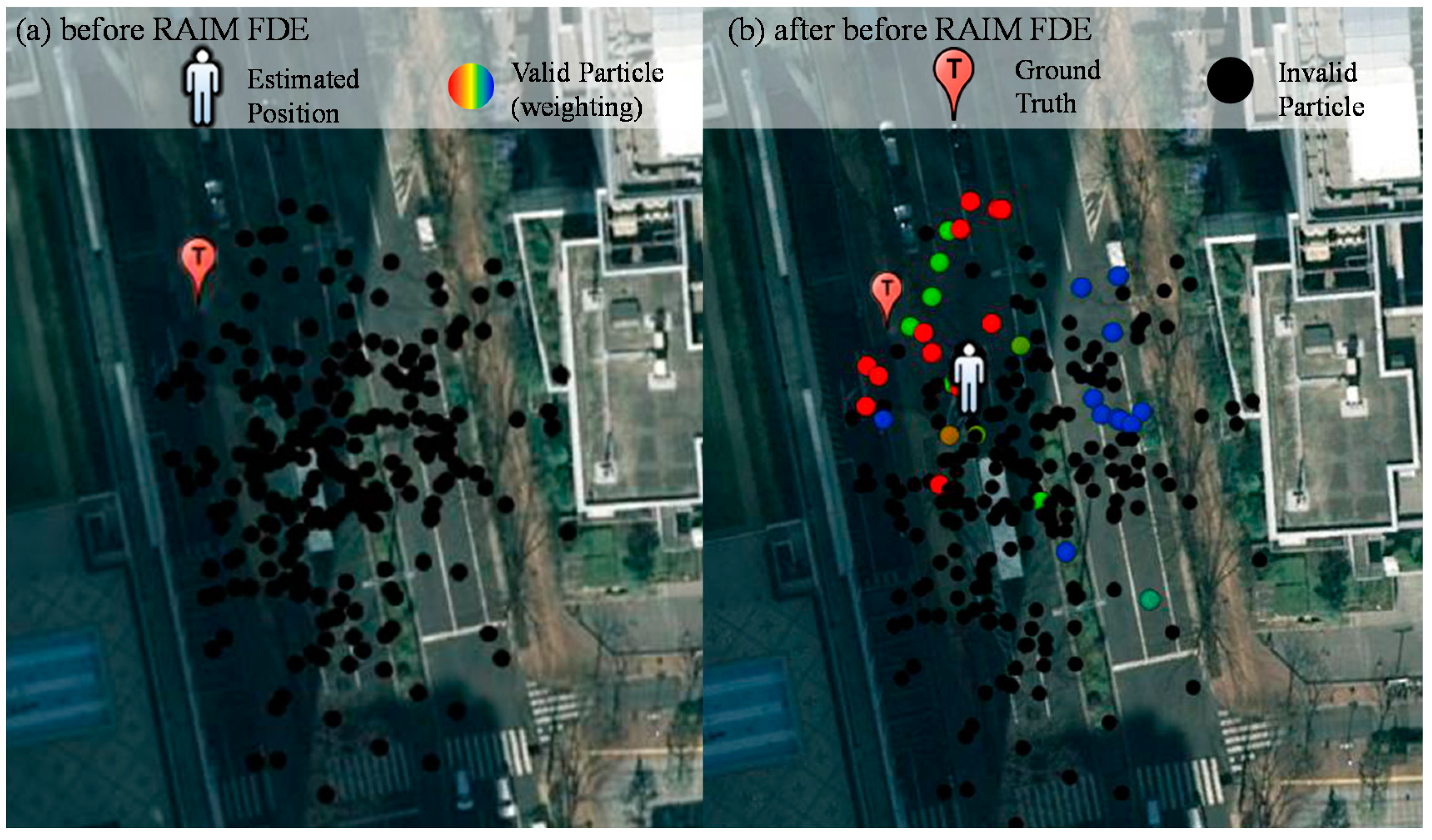
4. Abnormal Measurement Exclusion Using RAIM Multiple Fault Detection and Exclusion
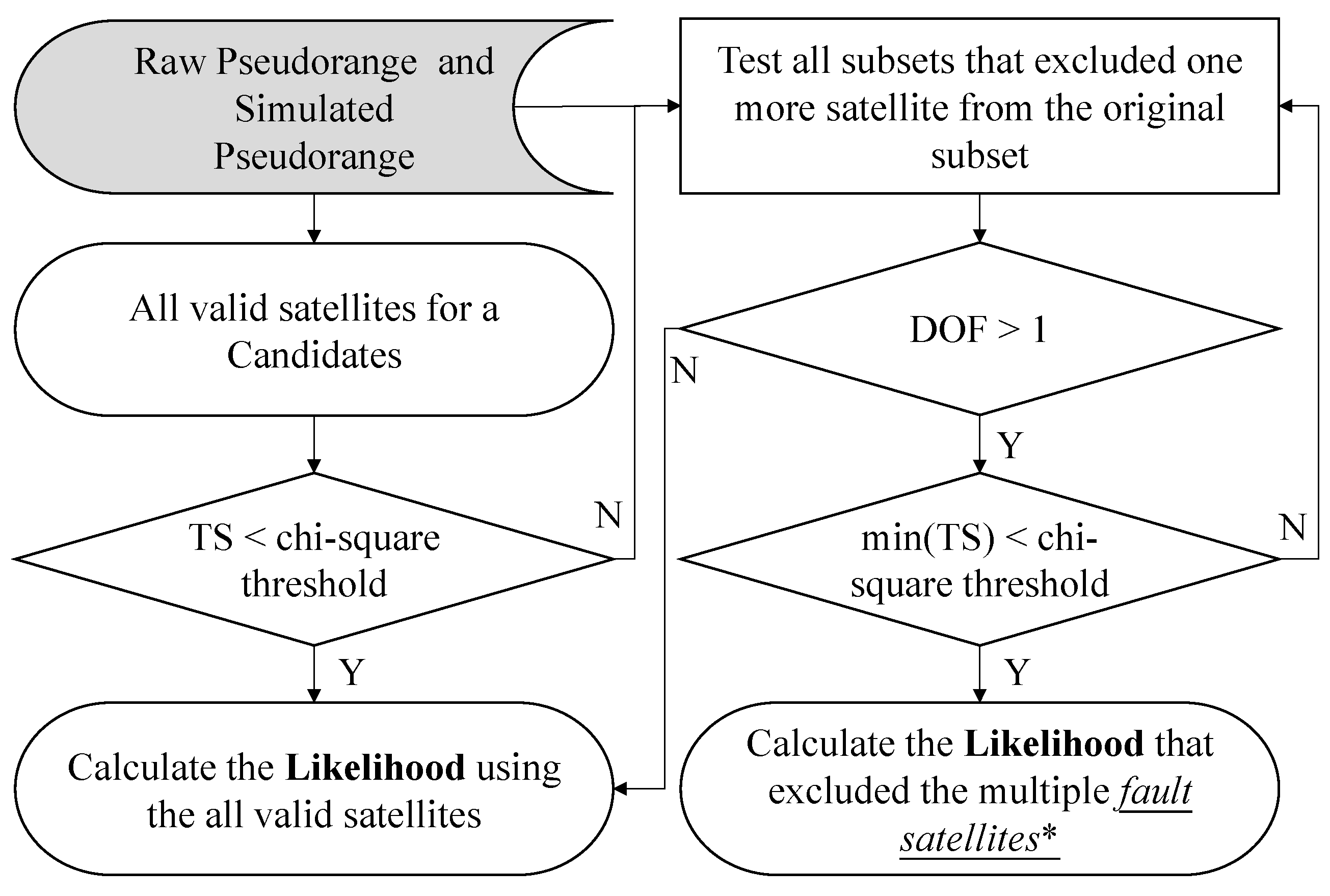
| DOF | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Value | 22.93 | 27.64 | 30.67 | 33.37 | 35.89 | 38.25 | 40.53 |
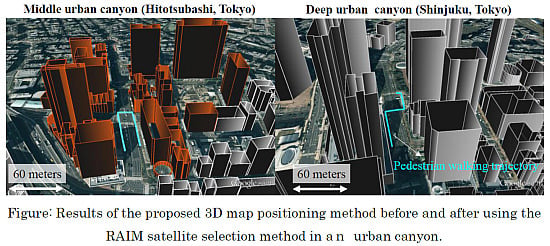
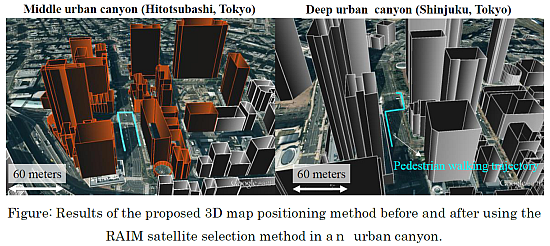
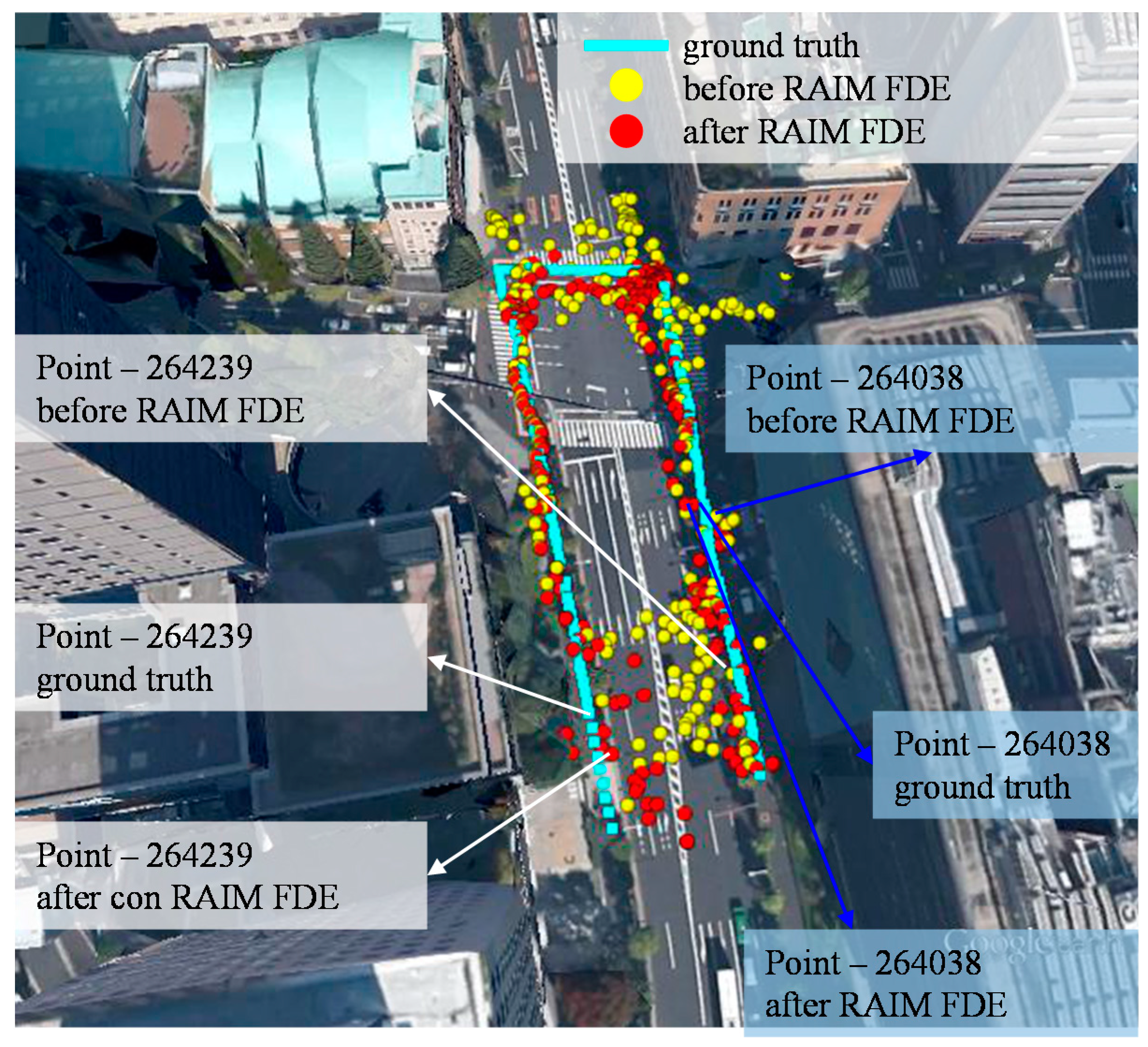
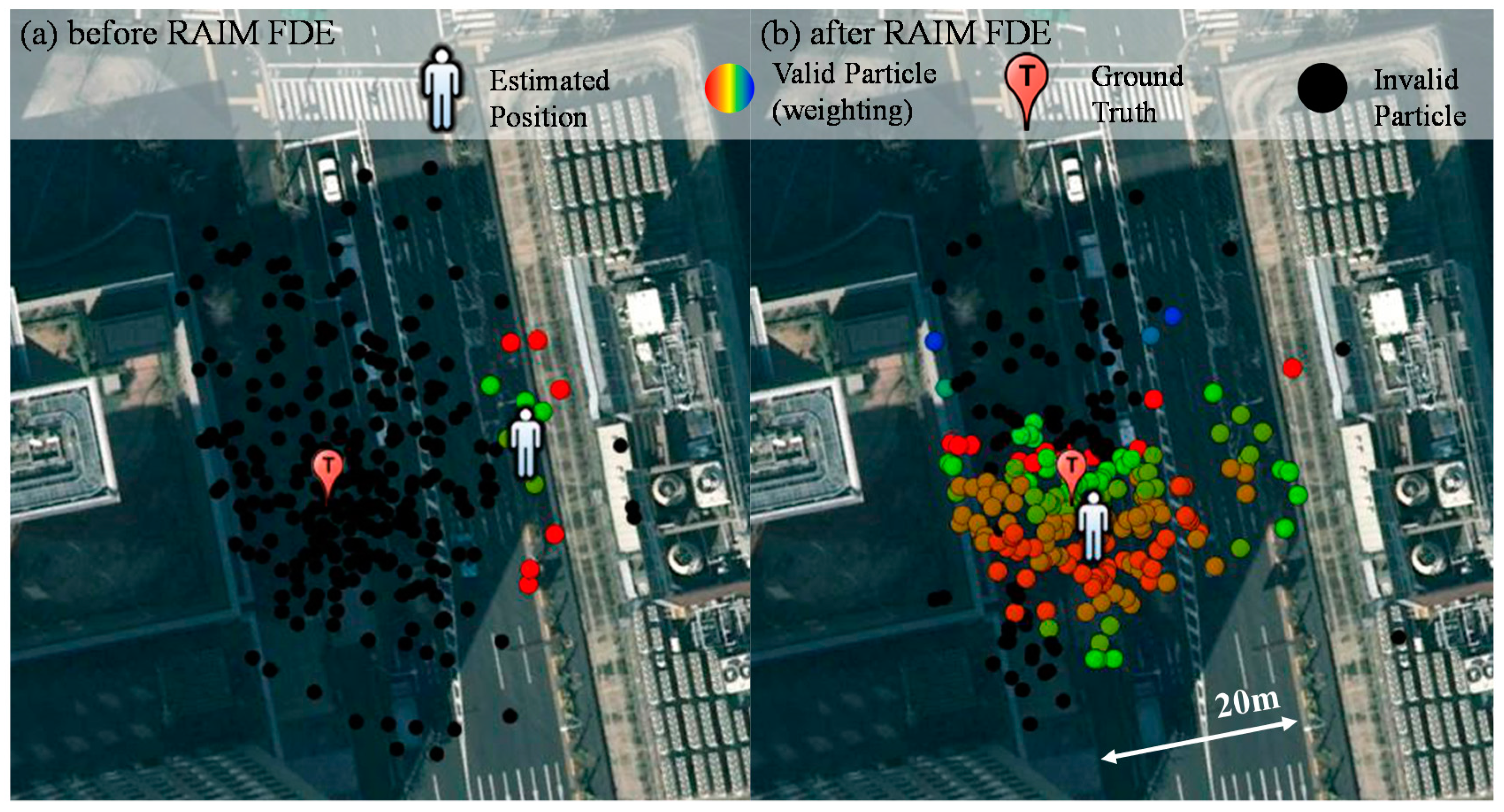
5. Experimental Results and Discussion
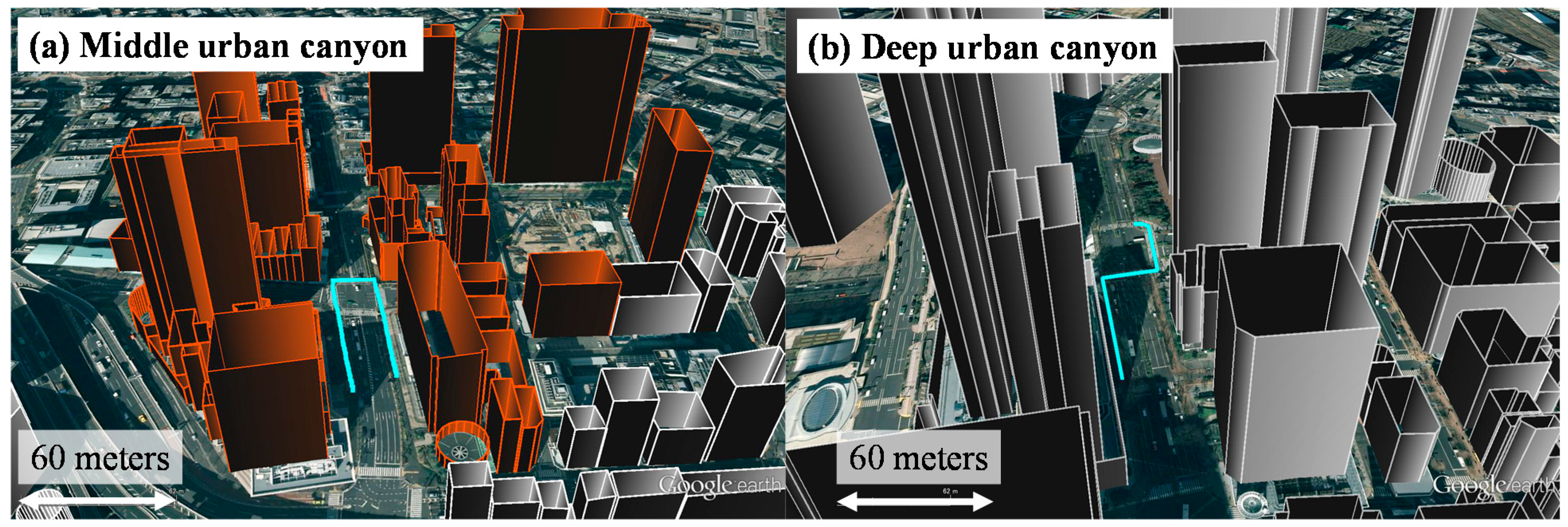
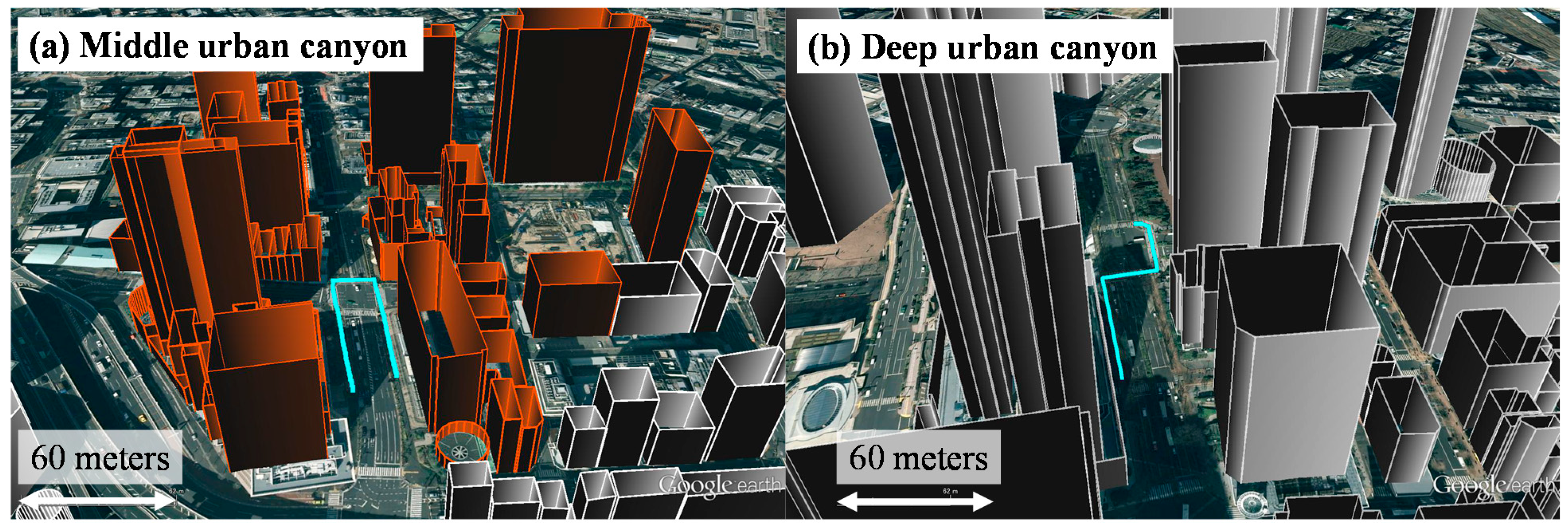
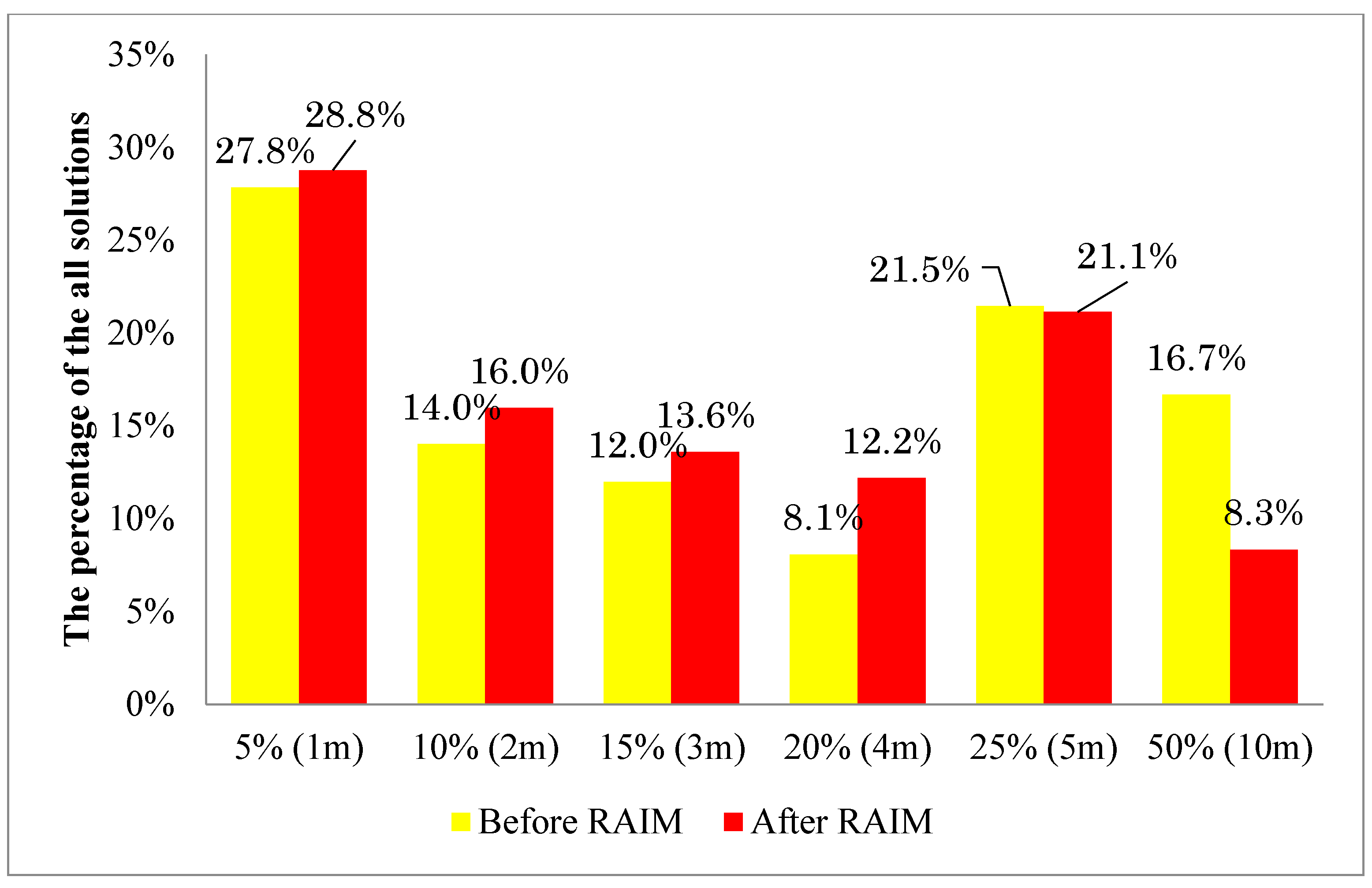
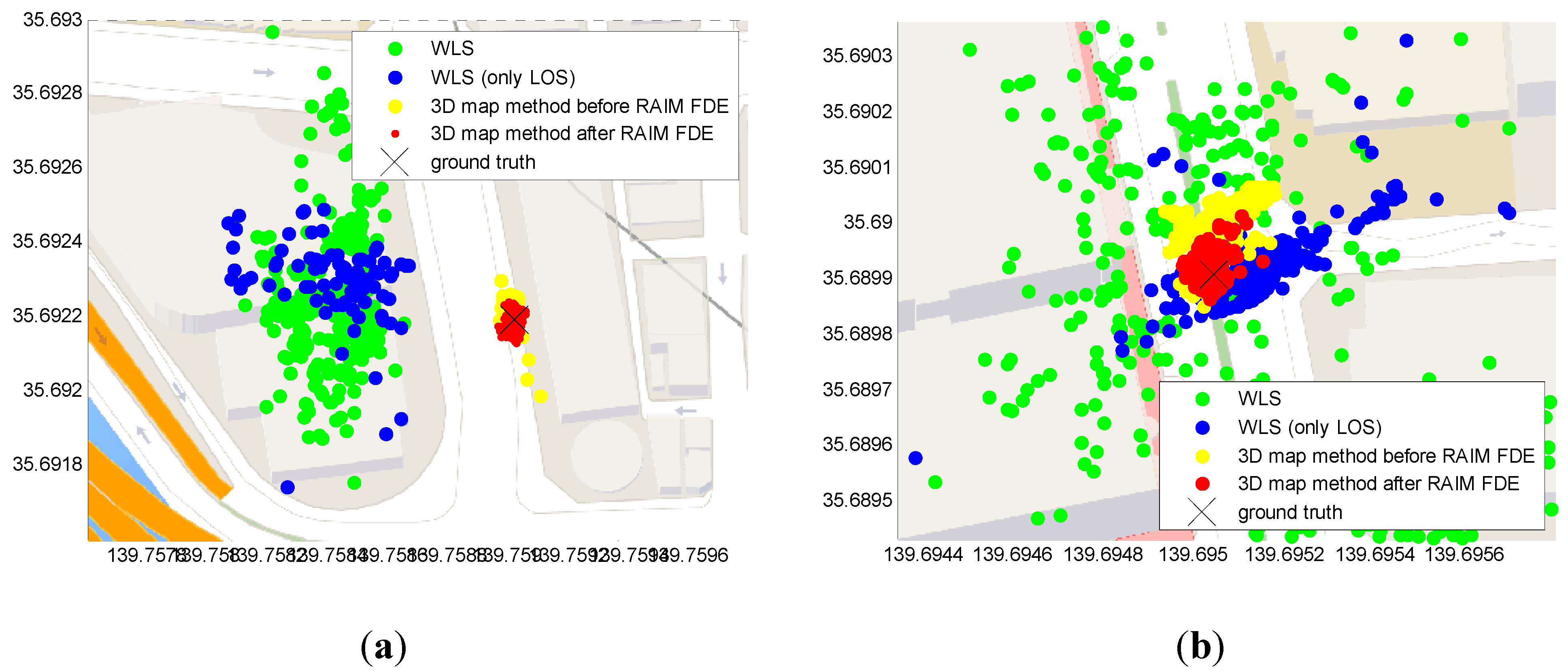
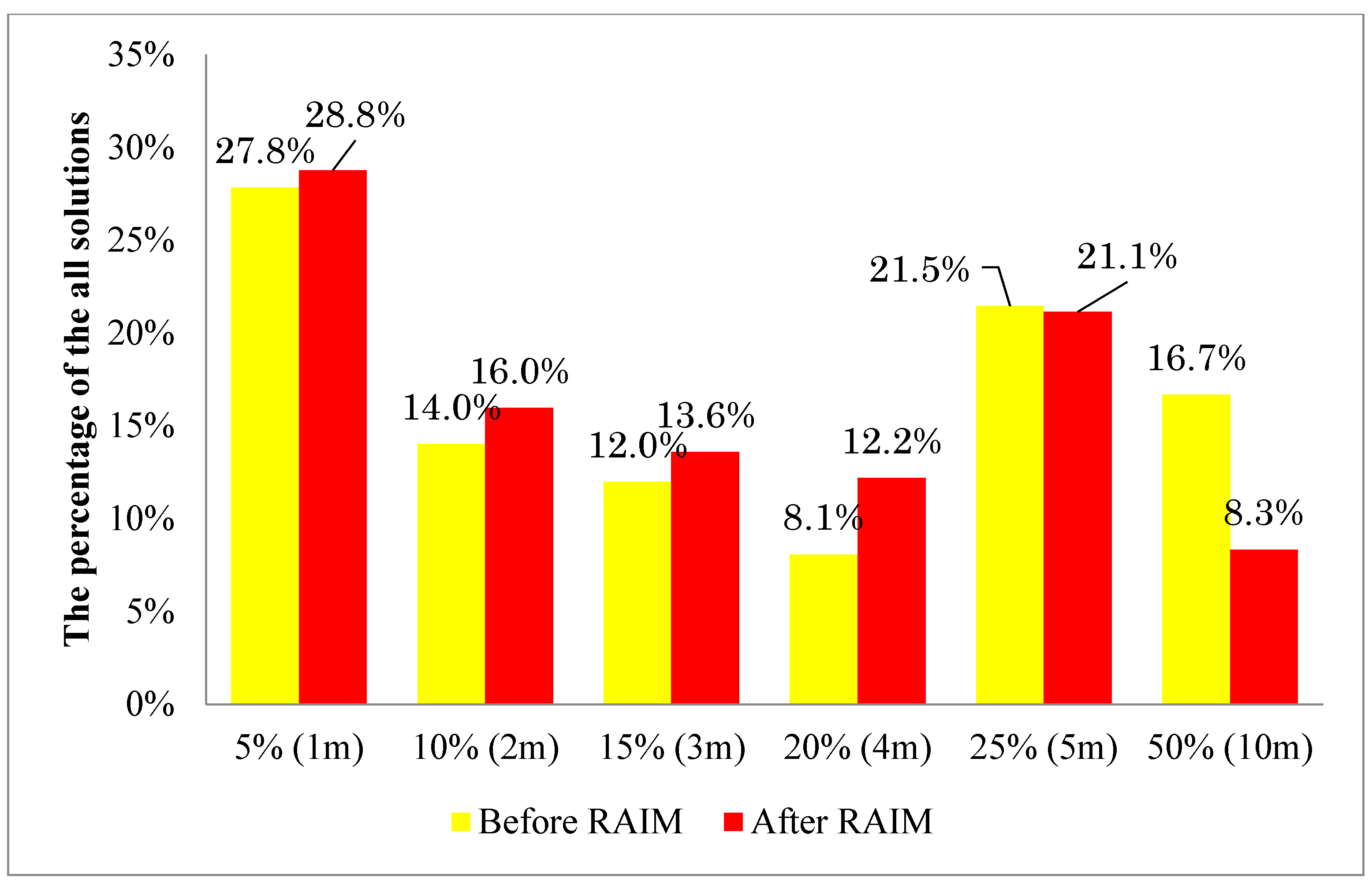
5.1. Middle Urban Canyon
| Methods | Mean (m) | Std (m) | Availability |
|---|---|---|---|
| Conventional positioning method (WLS) | 24.28 | 28.61 | 97.23% |
| WLS using only LOS | 12.57 | 13.38 | 53.36% |
| 3D map method | 3.97 | 3.97 | 100% |
| 3D map method with RAIM FDE | 2.96 | 2.44 | 100% |
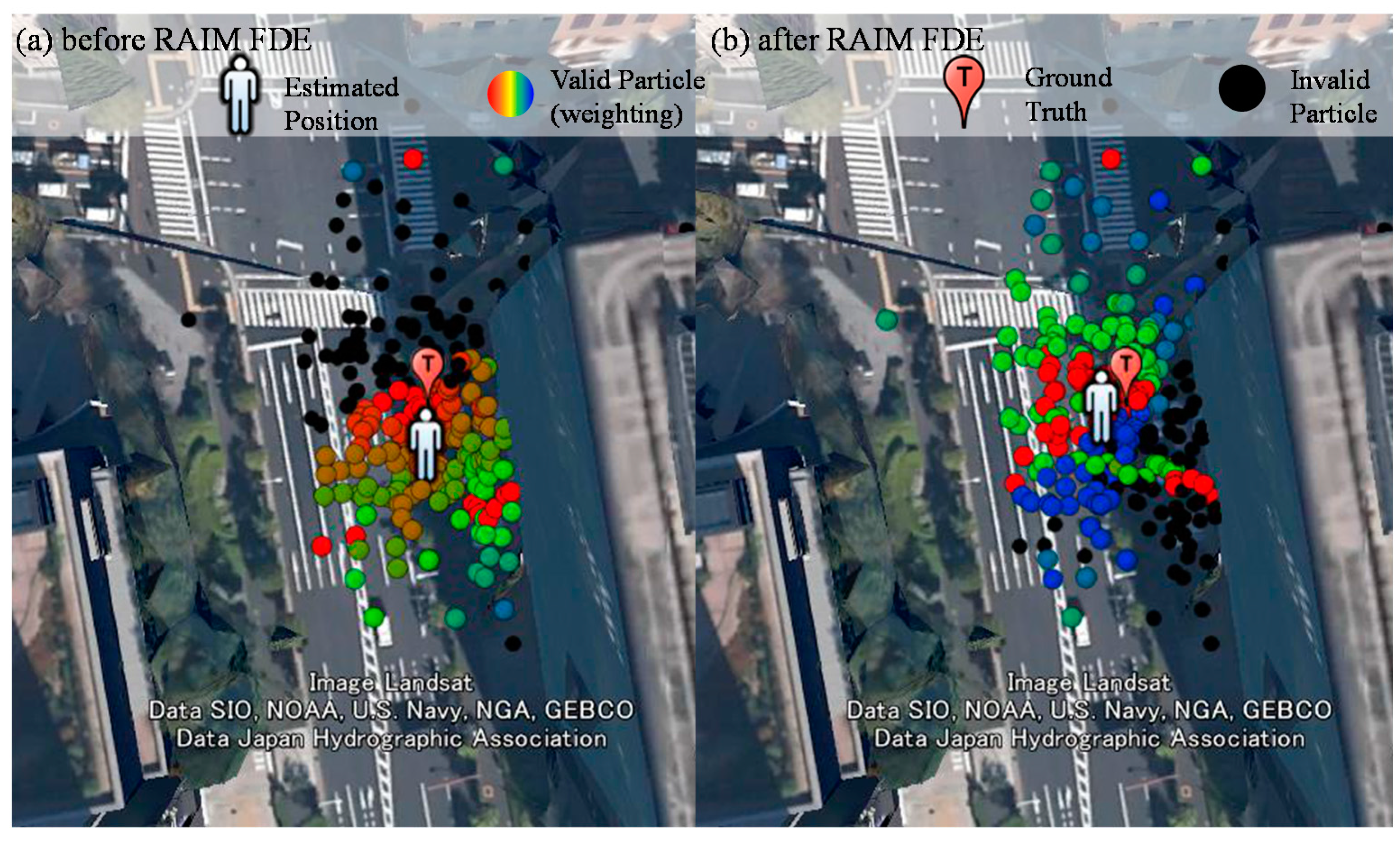
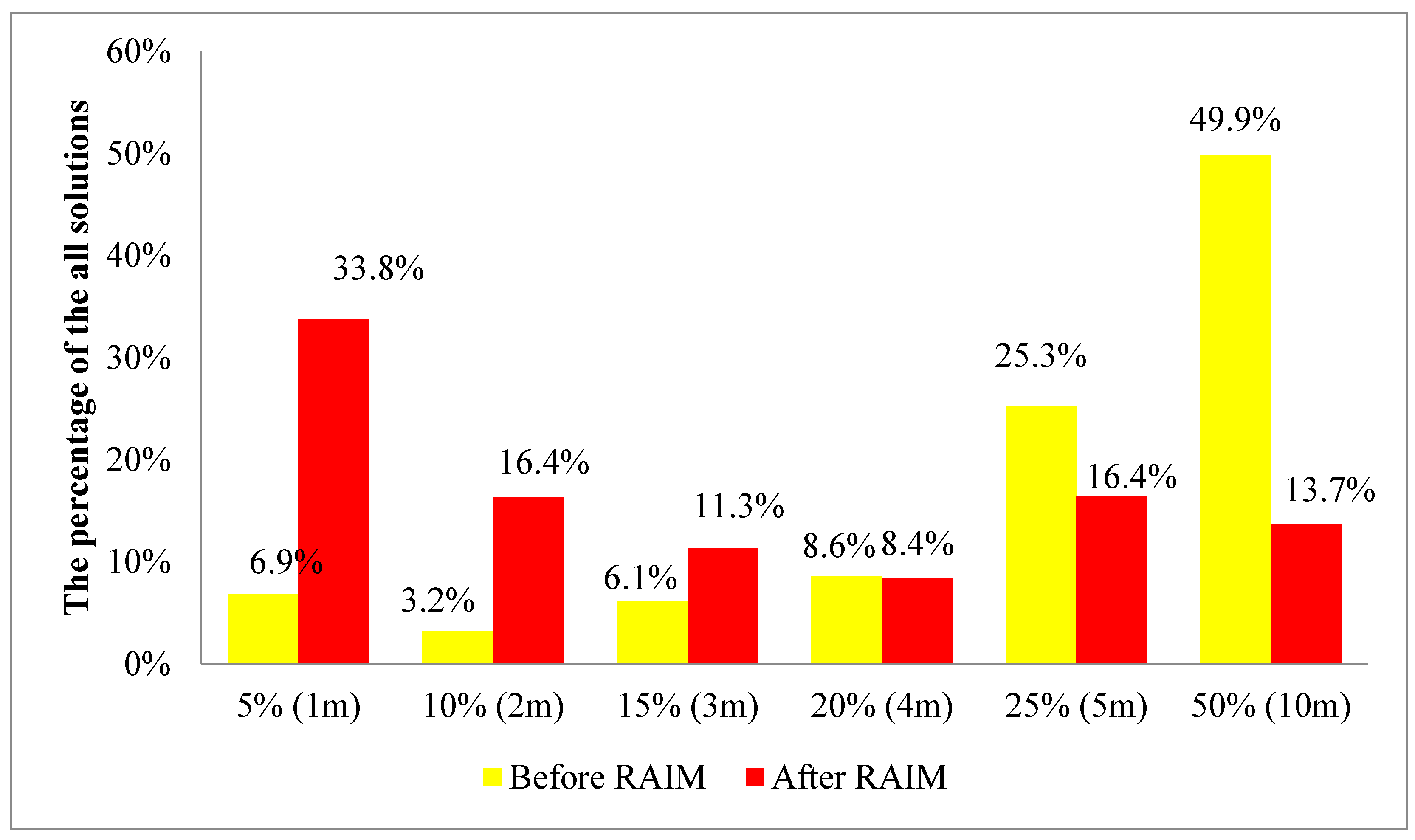
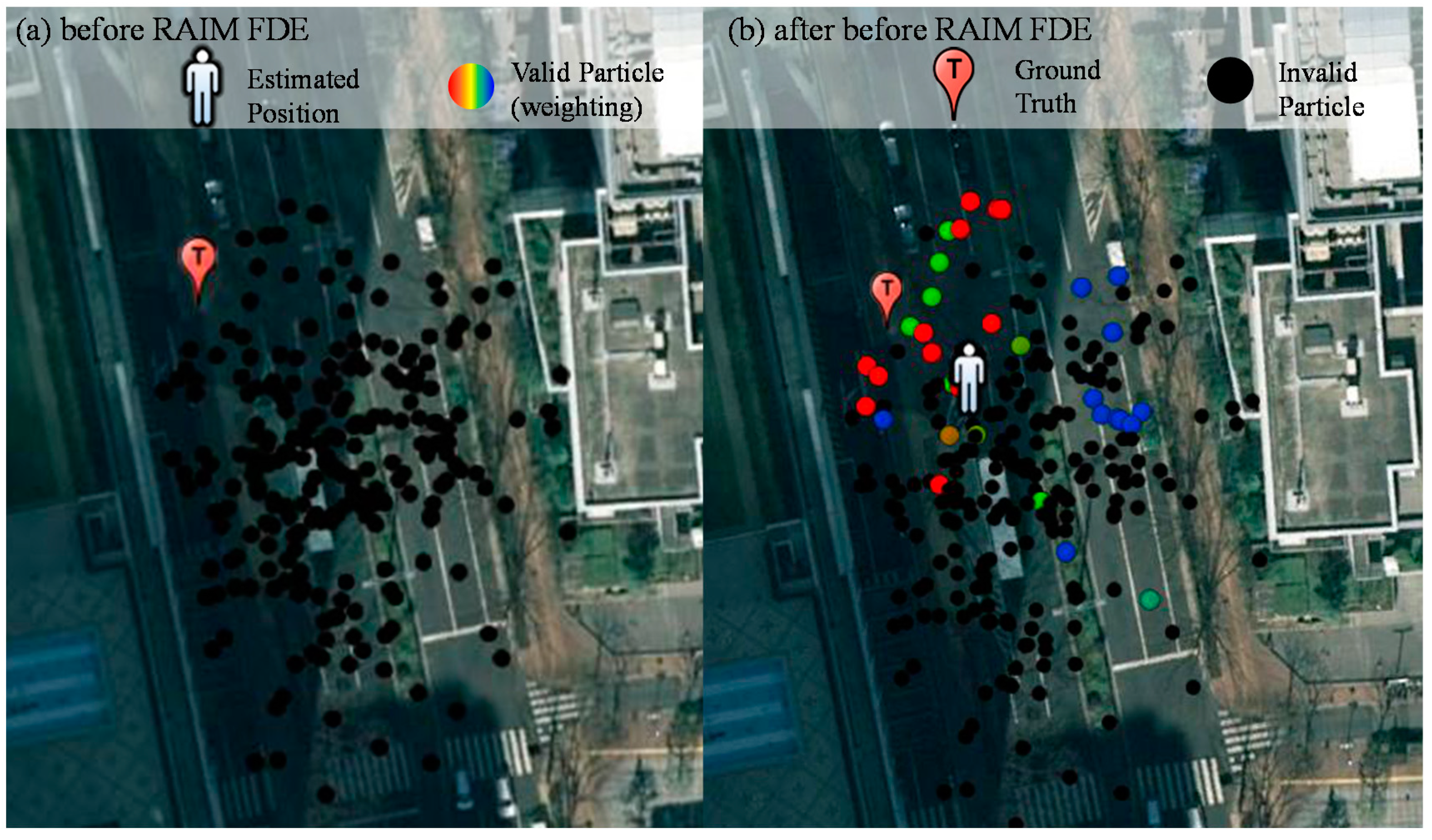
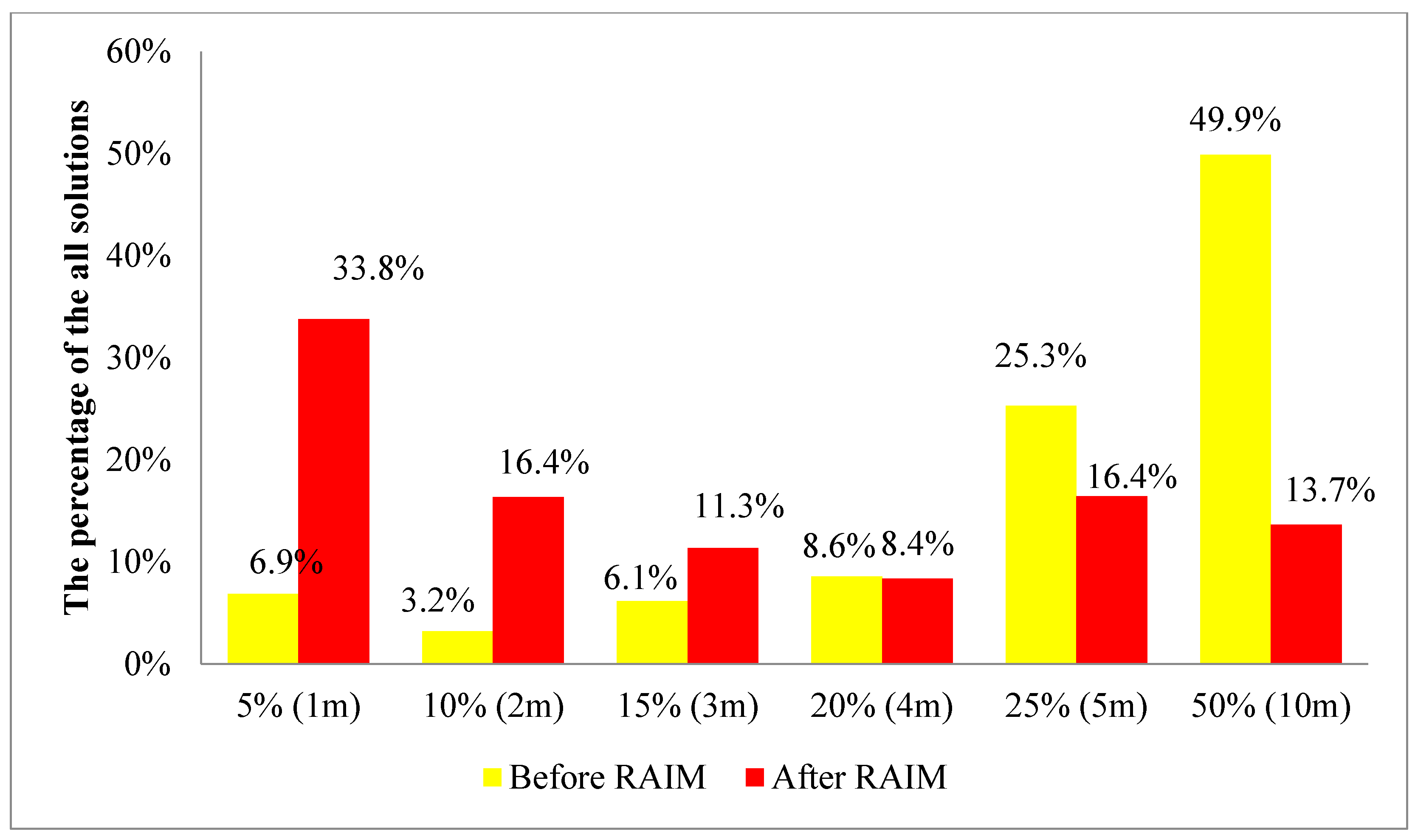
5.2. Deep Urban Canyon

| Methods | Mean (m) | Std (m) | Availability |
|---|---|---|---|
| Conventional positioning method (WLS) | 23.99 | 20.10 | 55.02% |
| WLS using only LOS | 13.21 | 20.32 | 10.58% |
| 3D map method | 8.78 | 5.62 | 73.68% |
| 3D map method with RAIM FDE | 3.85 | 3.56 | 83.16% |
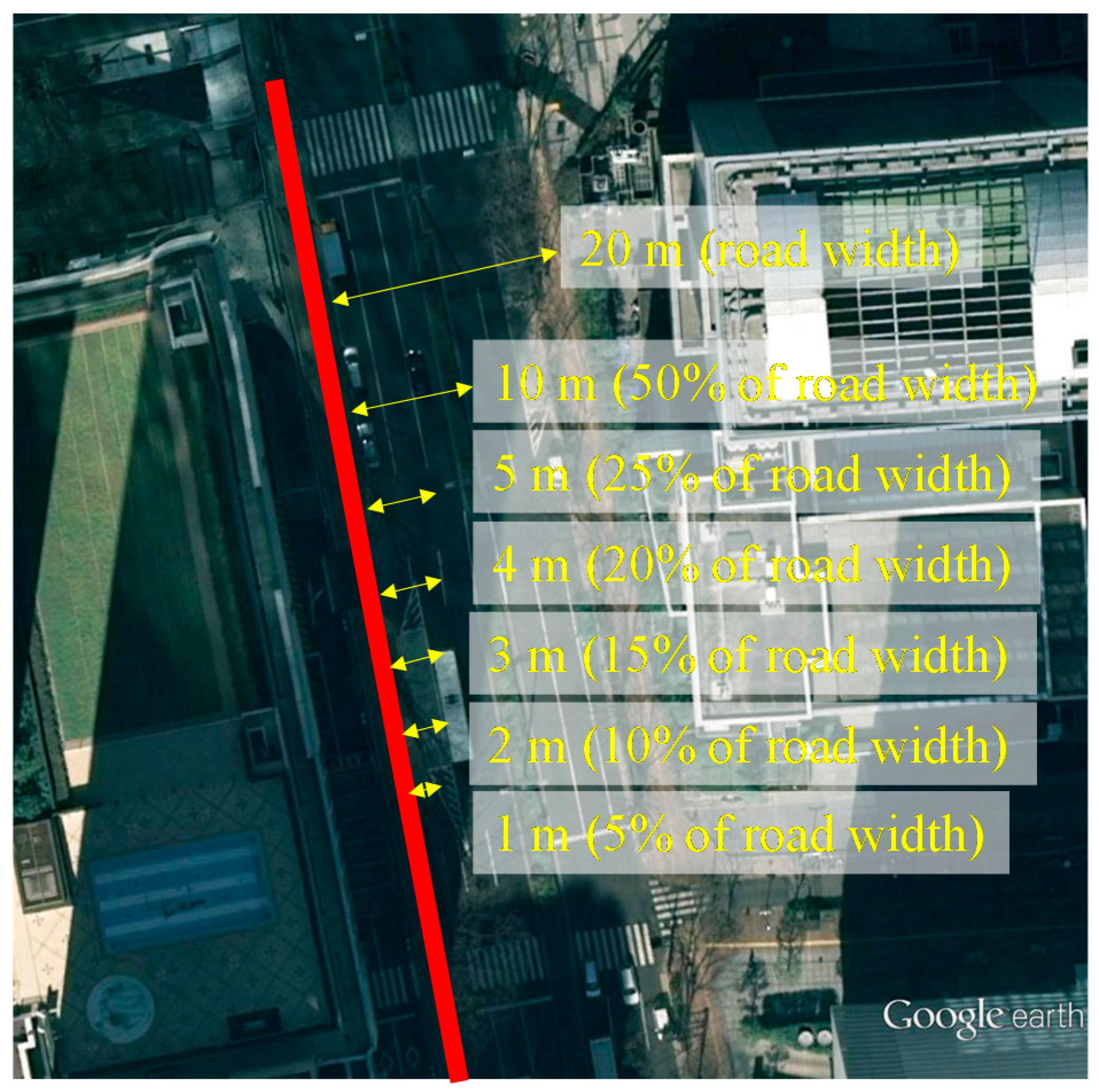
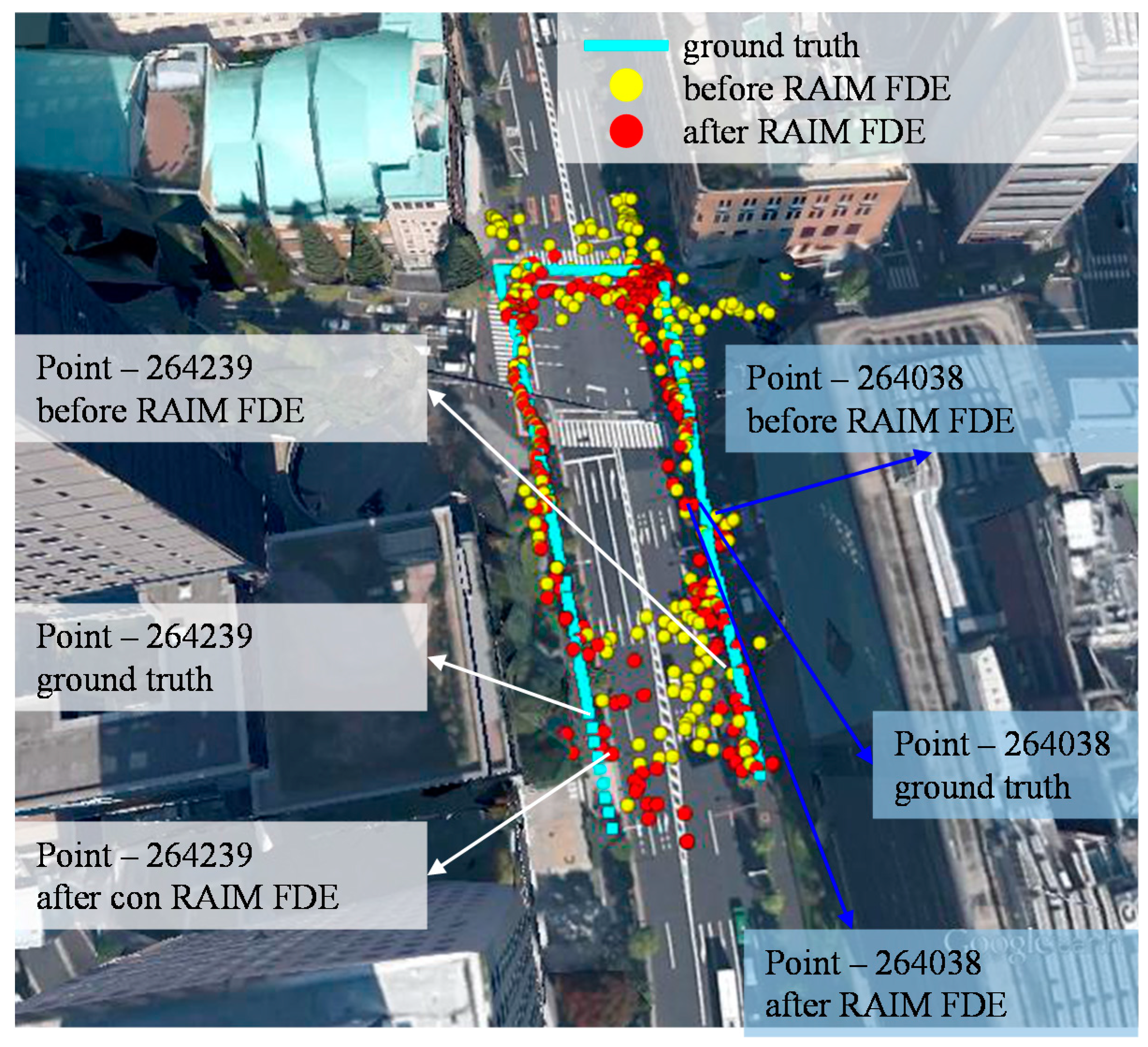
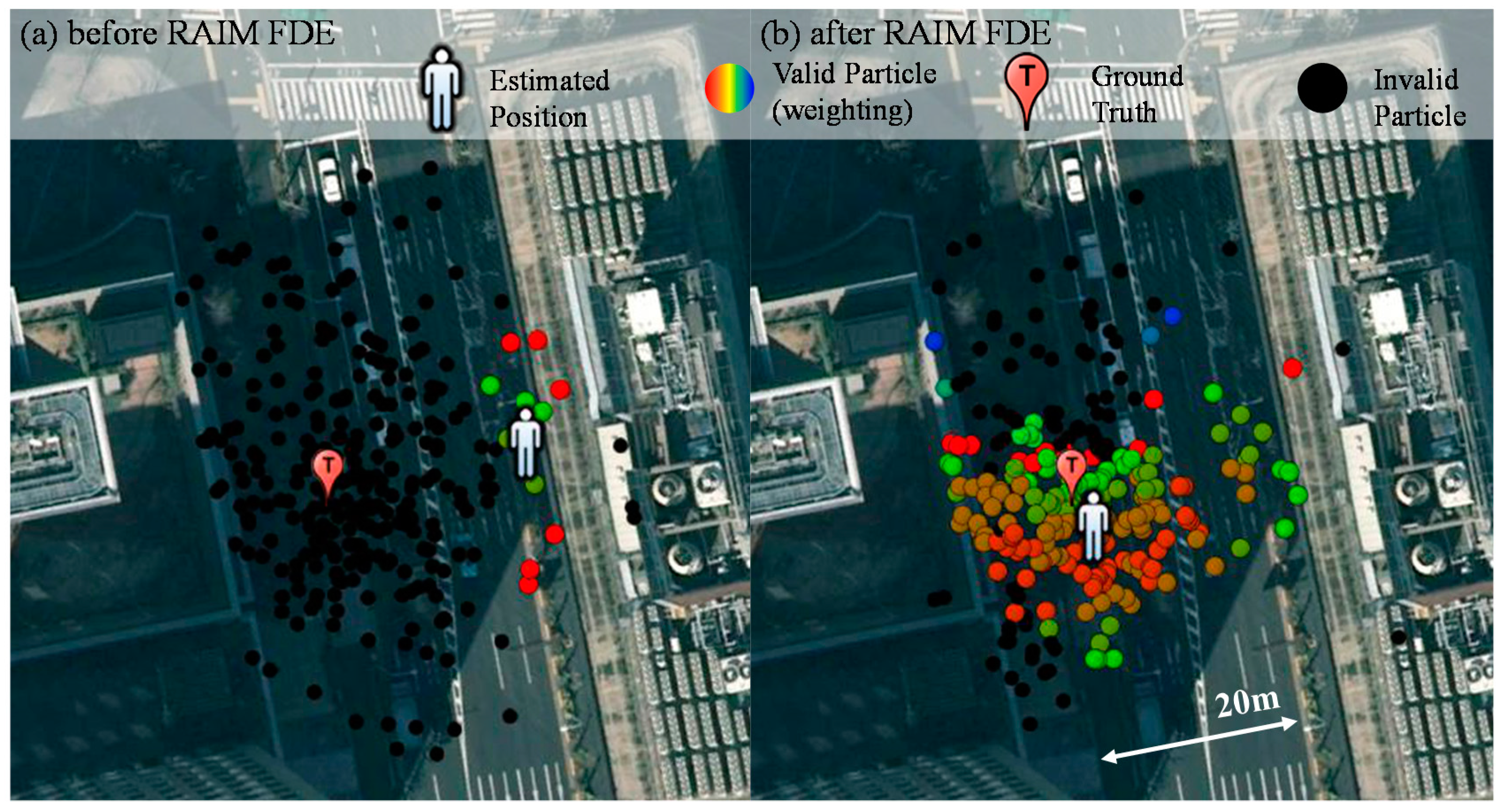
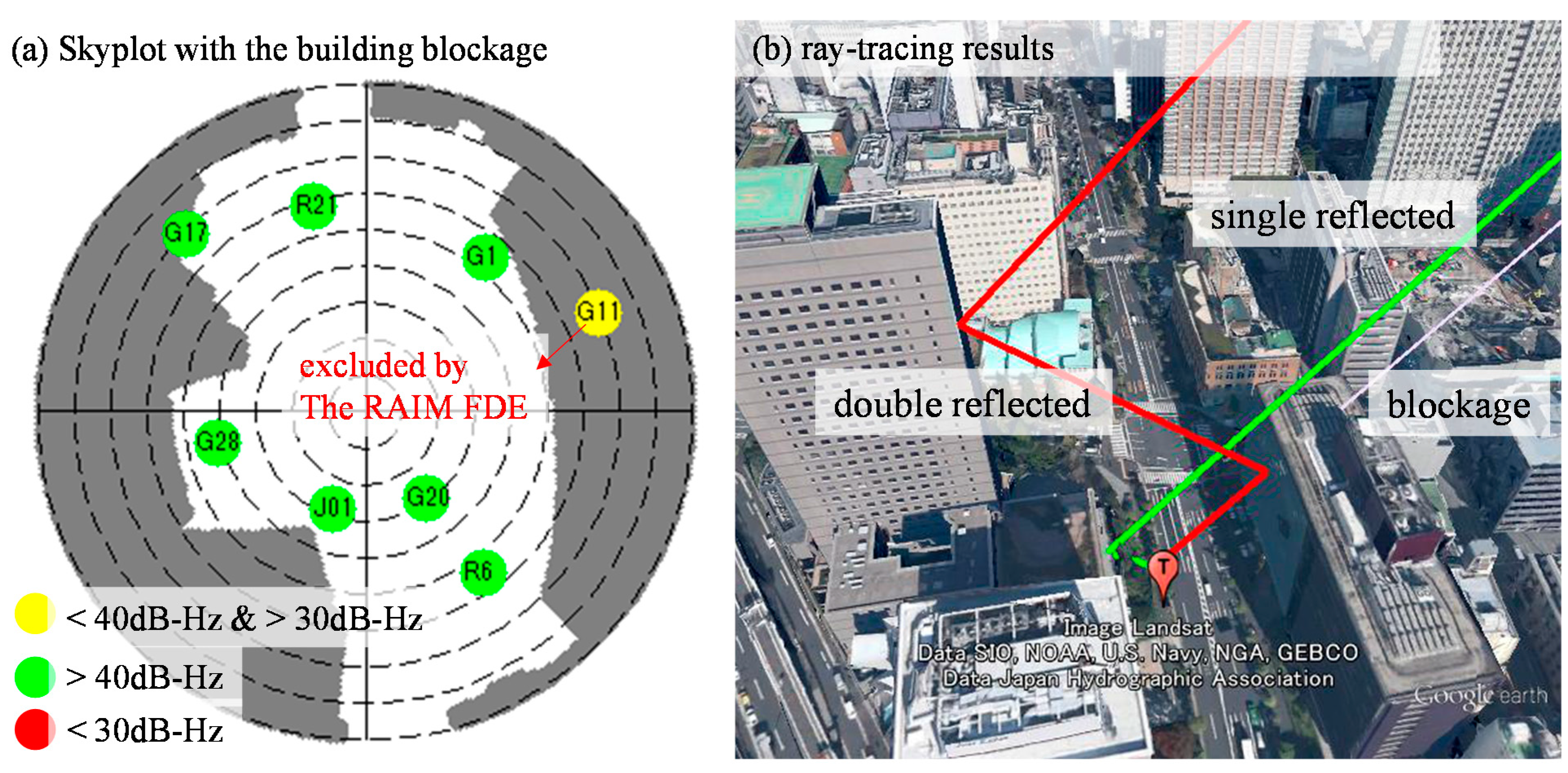
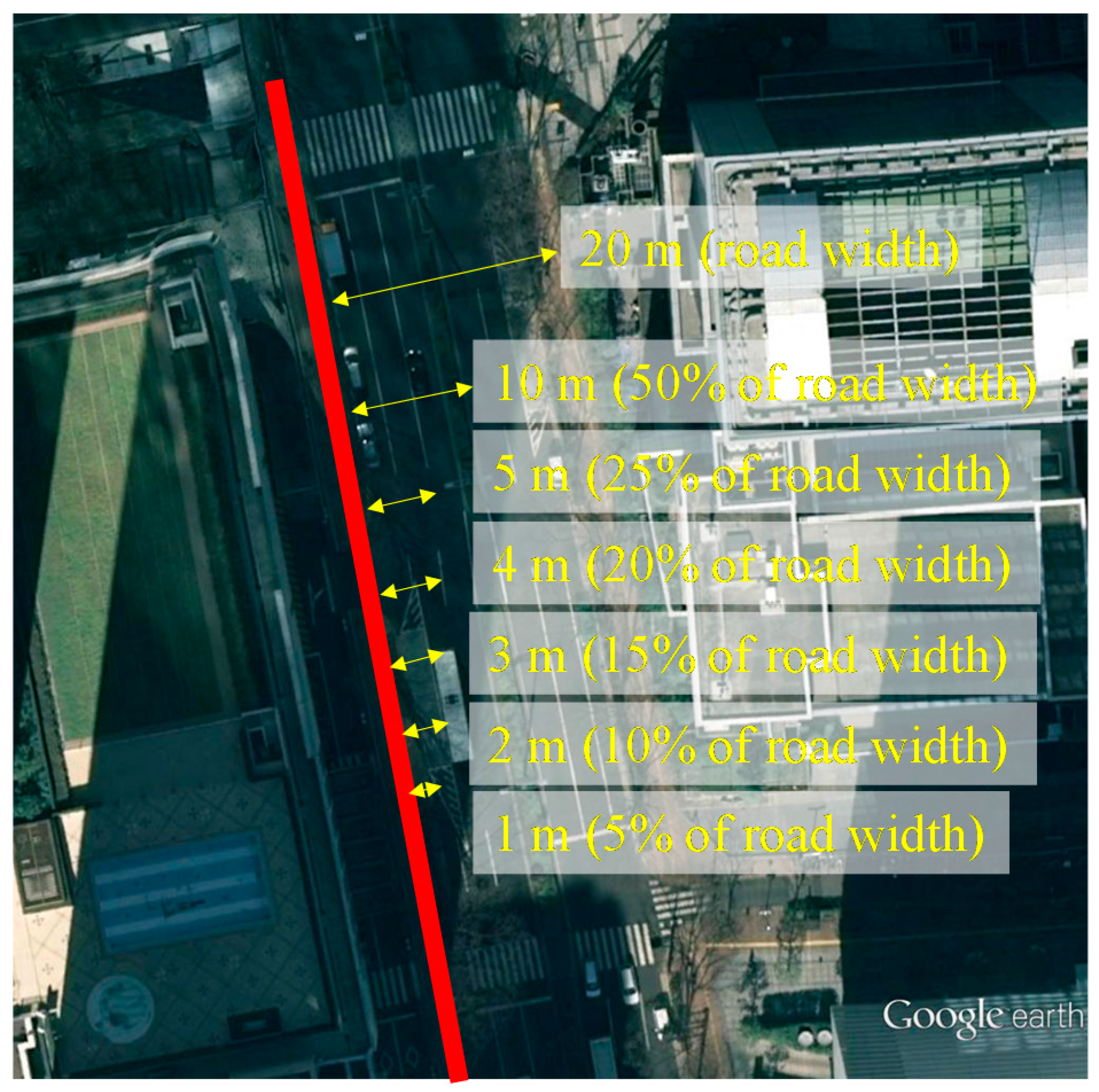
5.3. Histogram Study of the Lateral Positioning Error of the Proposed 3D Building Model Based Positioning Method
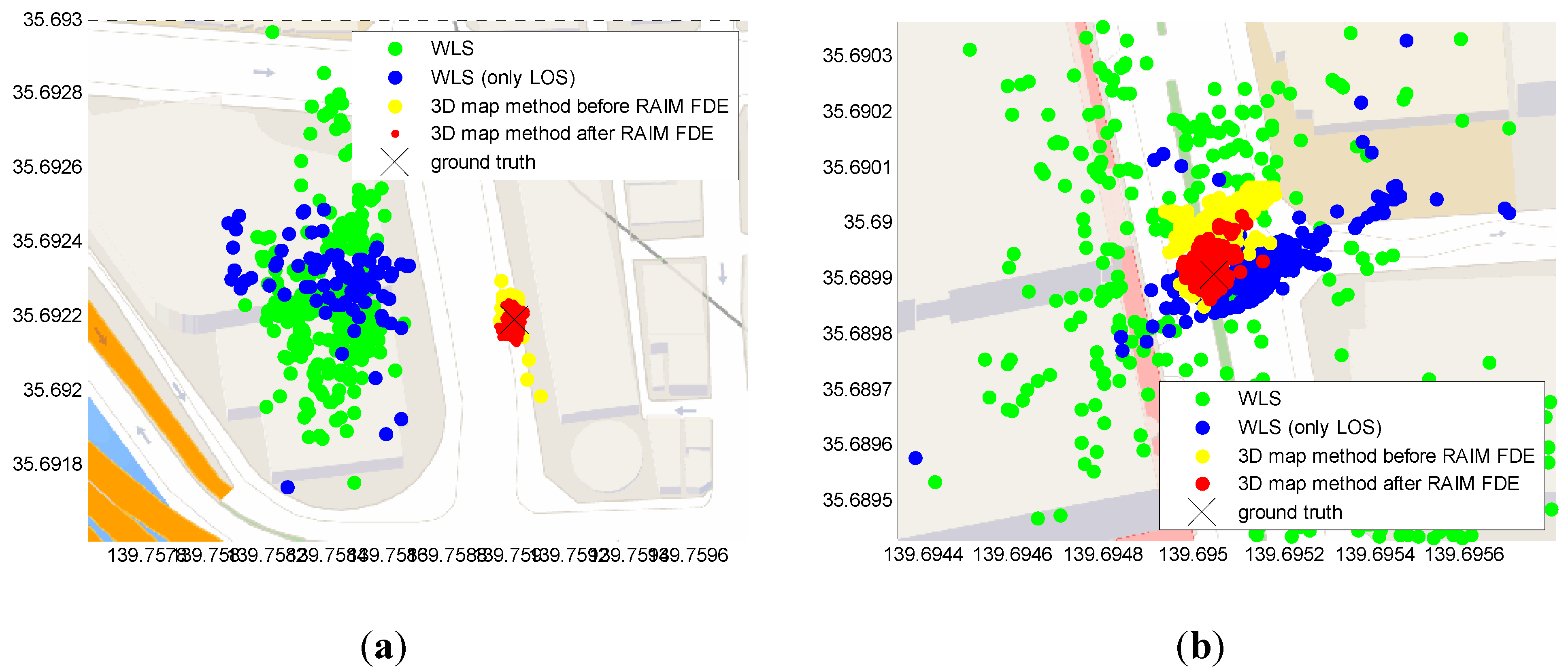
5.4. Horizontal Positioning Error Analysis by Static Data
| Methods | Middle Urban | Deep Urban | ||
|---|---|---|---|---|
| Mean (m) | Std (m) | Mean (m) | Std (m) | |
| 3D map method | 3.62 | 2.44 | 11.60 | 4.18 |
| 3D map method with RAIM FDE | 3.20 | 1.27 | 3.82 | 3.23 |
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Braasch, M.S. Multipath effects. In Global Positioning System: Theory and Applications; Parkinson, B.W., Spilker, J.J., Eds.; AIAA: Washington, DC, USA, 1996; Volume 1, pp. 547–568. [Google Scholar]
- McGraw, G.A.; Young, R.S.Y.; Reichenauer, K.; Stevens, J.; Ventrone, F. GPS Multipath Mitigation Assessment of Digital Beam Forming Antenna Technology in a Jpals Dual Frequency Smoothing Architecture. In Proceedings of the 2004 National Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 26–28 January 2004; pp. 561–572.
- Dierendonck, A.J.V.; Fenton, P.; Ford, T. Theory and performance of narrow correlator spacing in GPS receiver. J. Inst. Navig. 1992, 39, 265–283. [Google Scholar] [CrossRef]
- Garin, L.; Diggelen, F.V.; Rousseau, J.-M. Strobe & edge correlator multipath mitigation for code. In Proceedings of the 9th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 1996), Kansas City, MO, USA, 17–20 September 1996; pp. 657–664.
- Groves, P.D.; Christopher, J.M.; Macaulay, A.A. Demonstration of non-coherent deep INS/DPS integration for optimised signal-to-noise performance. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2007), Fort Worth, TX, USA, 25–28 September 2007; pp. 2627–2638.
- Petovello, M.G.; O’Driscoll, C.; Lachapelle, G. Carrier phase tracking of weak signals using different receiver architectures. In Proceedings of the 2008 National Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 28–30 January 2008; pp. 781–791.
- Soloviev, A.; Toth, C.; Grejner-Brzezinska, D. Performance of deeply integrated GPS/INS in dense forestry areas. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 20–23 September 2011; pp. 2427–2435.
- Soloviev, A.; van Graas, F. Use of deeply integrated GPS/INS architecture and laser scanners for the identification of multipath reflections in urban environments. IEEE J. Sel. Top. Signal Process. 2009, 3, 786–797. [Google Scholar] [CrossRef]
- Chiang, K.-W.; Duong, T.; Liao, J.-K. The performance analysis of a real-time integrated INS/GPS vehicle navigation system with abnormal GPS measurement elimination. Sensors 2013, 13, 10599–10622. [Google Scholar] [CrossRef] [PubMed]
- Ali, K.; Chen, X.; Dovis, F.; de Castro, D.; Fernández, A.J. Multipath estimation in urban environments from joint GNSS receivers and lidar sensors. Sensors 2012, 12, 14592–14603. [Google Scholar] [CrossRef] [PubMed]
- Xie, P.; Petovello, M.G. Improving high sensitivity receiver performance in multipath environment for vehicular applications. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 448–458.
- Hsu, L.-T.; Jan, S.-S.; Groves, P.; Kubo, N. Multipath mitigation and nlos detection using vector tracking in urban environments. GPS Solut. 2015, 19, 249–262. [Google Scholar] [CrossRef]
- Viandier, N.; Nahimana, D.F.; Marais, J.; Duflos, E. GNSS performance enhancement in urban environment based on pseudo-range error model. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 377–382.
- Obst, M.; Bauer, S.; Reisdorf, P.; Wanielik, G. Multipath detection with 3D digital maps for robust multi-constellation GNSS/INS vehicle localization in urban areas. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium (IV), Alcala de Henares, Spain, 3–7 June 2012; pp. 184–190.
- Peyraud, S.; Bétaille, D.; Renault, S.; Ortiz, M.; Mougel, F.; Meizel, D.; Peyret, F. About non-line-of-sight satellite detection and exclusion in a 3D map-aided localization algorithm. Sensors 2013, 13, 829–847. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Groves, P.D.; Ziebart, M.K. GNSS shadow matching: Improving urban positioning accuracy using a 3D city model with optimized visibility scoring scheme. J. Inst. Navig. 2013, 60, 195–207. [Google Scholar] [CrossRef]
- Suzuki, T.; Kubo, N. Correcting GNSS multipath errors using a 3D surface model and particle filter. In Proceedings of the 26th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 1583–1595.
- Kumar, R.; Petovello, M.G. A novel GNSS positioning technique for improved accuracy in urban canyon scenarios using 3D city model. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 2139–2148.
- Groves, P.D.; Jiang, Z.; Wang, L.; Ziebart, M.K. Intelligent urban positioning using multi-constellation GNSS with 3D mapping and nlos signal detection. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 458–472.
- Suzuki, T.; Kubo, N. GNSS positioning with multipath simulation using 3D surface model in urban canyon. In Proceedings of the ION GNSS 2012, Nashville, TN, USA, 17–21 September 2012; pp. 438–447.
- Pinana-Diaz, C.; Toledo-Moreo, R.; Betaille, D.; Gomez-Skarmeta, A.F. GPS multipath detection and exclusion with elevation-enhanced maps. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 19–24.
- Meguro, J.; Murata, T.; Takiguchi, J.; Amano, Y.; Hashizume, T. GPS multipath mitigation for urban area using omnidirectional infrared camera. IEEE Trans. Intell. Transp. Syst. 2009, 10, 22–30. [Google Scholar] [CrossRef]
- Miura, S.; Hisaka, S.; Kamijo, S. GPS multipath detection and rectification using 3D maps. In Proceedings of the 2013 16th International IEEE Conference on Intelligent Transportation Systems (ITSC), Hague, Netherlands, 6–9 October 2013; pp. 1528–1534.
- Hsu, L.-T.; Chen, F.; Kamijo, S. Evaluation of multi-GNSSs and GPS with 3D map methods for pedestrian positioning in an urban canyon environment. IEICE Trans. Commun. Comput. Sci. (Spec. Issue Intell. Transp. Syst.) 2015, E98-A, 284–293. [Google Scholar] [CrossRef]
- Hsu, L.-T.; Gu, Y.; Kamijo, S. 3D building model-based pedestrian positioning method using GPS/glonass/qzss and its reliability calculation. GPS Solut. 2015. [Google Scholar] [CrossRef]
- Iskander, M.F.; Zhengqing, Y. Propagation prediction models for wireless communication systems. IEEE Trans. Microw. Theory Tech. 2002, 50, 662–673. [Google Scholar] [CrossRef]
- Groves, P.D.; Jiang, Z. Height aiding, c/n 0 weighting and consistency checking for GNSS nlos and multipath mitigation in urban areas. J. Navig. 2013, 66, 653–669. [Google Scholar] [CrossRef]
- Brown, R.G. A baseline GPS raim scheme and a note on the equivalence of three raim methods. J. Inst. Navig. 1992, 39, 301–316. [Google Scholar] [CrossRef]
- Blanch, J.; Walter, T.; Enge, P.; Lee, Y.; Pervan, B.; Rippl, M.; Spletter, A. Advanced raim user algorithm description: Integrity support message processing, fault detection, exclusion, and protection level calculation. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 2828–2849.
- Hsu, L.-T.; Gu, Y.; Chen, F.; Wada, Y.; Kamijo, S. Assessment of qzss l1-saif for 3D map-based pedestrian positioning method in an urban environment. In Proceedings of the 2015 International Technical Meeting of the Institute of Navigation, Dana Point, CA, USA, 26–28 January 2015.
- Walter, T.; Enge, P. Weighted raim for precision approach. In Proceedings of the 8th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 1995), Palm Springs, CA, USA, 12–15 September 1995; pp. 1995–2004.
- Feng, S.; Ochieng, W.Y.; David, W.; Ioannides, R. A highly accurate and computationally efficient method for predicting raim holes. J. Navig. 2006, 59, 105–117. [Google Scholar] [CrossRef]
- O’Keefe, K.; Lachapelle, G.; di Fazio, A.; Bettinelli, D. Receiver autonomous integrity monitoring in urban vehicle navigation: The five satellite case. J. Glob. Position. Syst. 2011, 10, 157–164. [Google Scholar] [CrossRef]
- Jiang, Z.; Groves, P.D. GNSS nlos and multipath error mitigation using advanced multi-constellation consistency checking with height aiding. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 79–88.
- Iwase, T.; Suzuki, N.; Watanabe, Y. Estimation and exclusion of multipath range error for robust positioning. GPS Solut. 2013, 17, 53–62. [Google Scholar] [CrossRef]
- Walter, T.; Blanch, J.; Enge, P. Reduced subset analysis for multi-constellation araim. In Proceedings of the 2014 International Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 27–29 January 2014.
- Blanch, J.; Walter, T.; Enge, P. Efficient multiple fault exclusion with a large number of pseudorange measurements. In Proceedings of the 2015 International Technical Meeting of the Institute of Navigation, Dana Point, CA, USA, 26–28 January 2015.
- Yetkin, M.; Inal, C. L1 norm minimization in GPS networks. Surv. Rev. 2011, 43, 523–532. [Google Scholar] [CrossRef]
- Parkinson, B.W.; Axelrad, P. Autonomous GPS integrity monitoring using the pseudorange residual. J. Inst. Navig. 1988, 35, 255–274. [Google Scholar] [CrossRef]
- Takasu, T.; Yasuda, A. Development of the low-cost rtk-GPS receiver with an open source program package rtklib. In Proceedings of the International Symposium on GPS/GNSS 2009, Jeju, Korea, 4–6 November 2009; pp. 121–131.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsu, L.-T.; Gu, Y.; Kamijo, S. NLOS Correction/Exclusion for GNSS Measurement Using RAIM and City Building Models. Sensors 2015, 15, 17329-17349. https://doi.org/10.3390/s150717329
Hsu L-T, Gu Y, Kamijo S. NLOS Correction/Exclusion for GNSS Measurement Using RAIM and City Building Models. Sensors. 2015; 15(7):17329-17349. https://doi.org/10.3390/s150717329
Chicago/Turabian StyleHsu, Li-Ta, Yanlei Gu, and Shunsuke Kamijo. 2015. "NLOS Correction/Exclusion for GNSS Measurement Using RAIM and City Building Models" Sensors 15, no. 7: 17329-17349. https://doi.org/10.3390/s150717329
APA StyleHsu, L.-T., Gu, Y., & Kamijo, S. (2015). NLOS Correction/Exclusion for GNSS Measurement Using RAIM and City Building Models. Sensors, 15(7), 17329-17349. https://doi.org/10.3390/s150717329