
Quaternion-Based Unscented Kalman Filter for Accurate Indoor Heading Estimation Using Wearable Multi-Sensor System

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
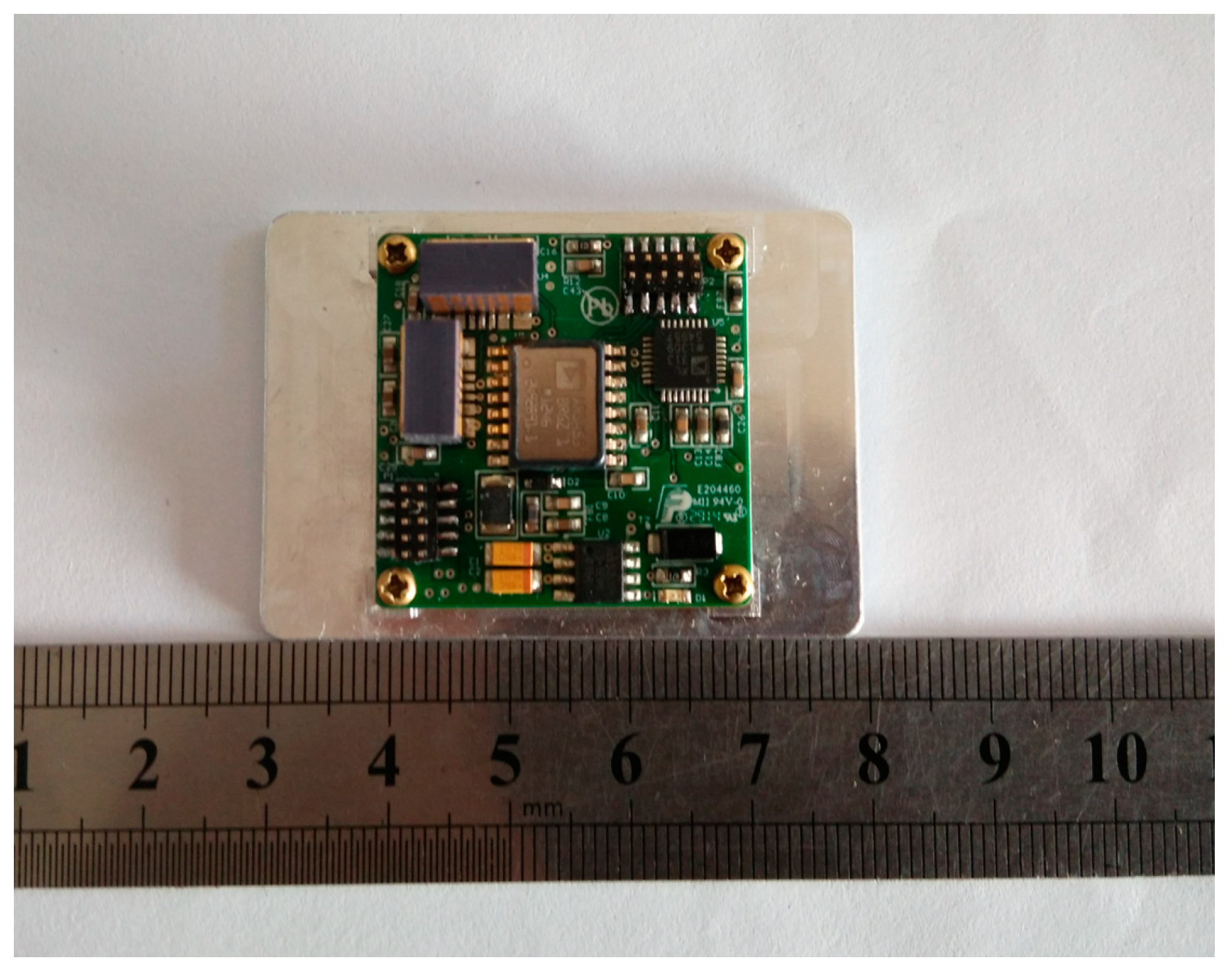
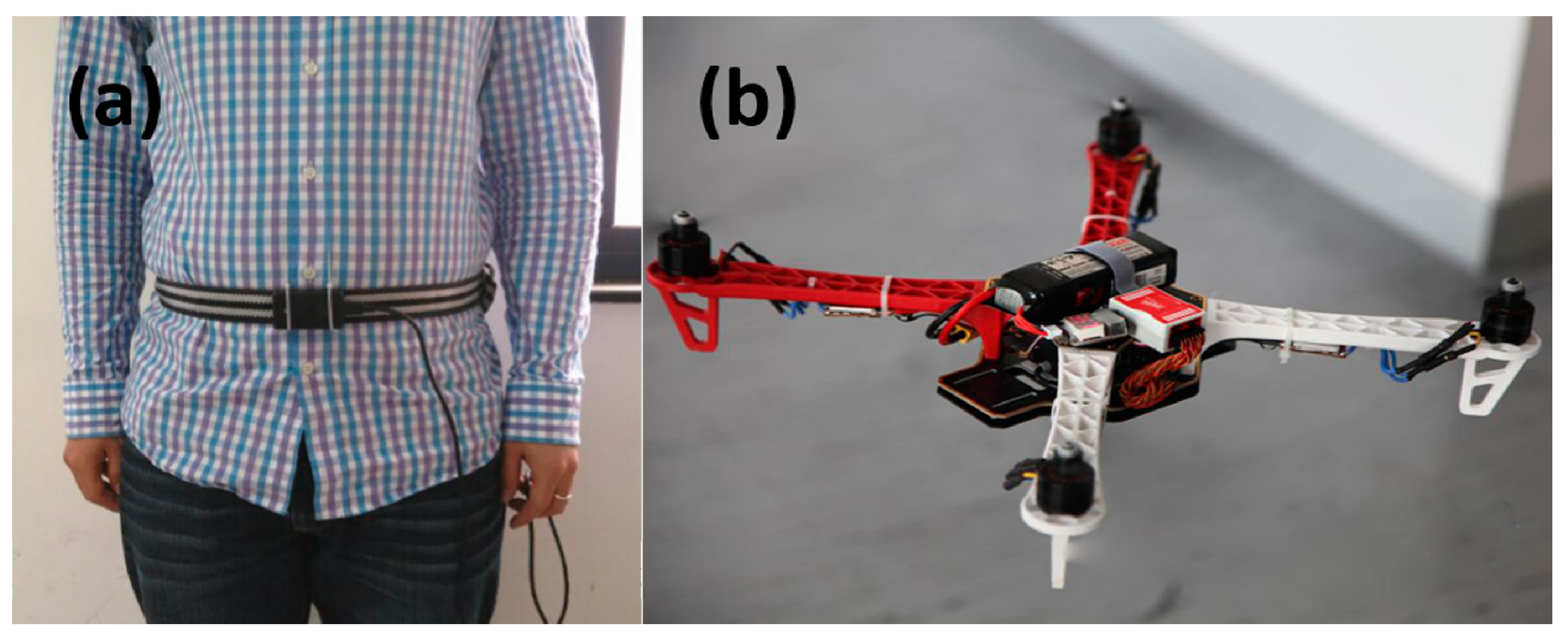
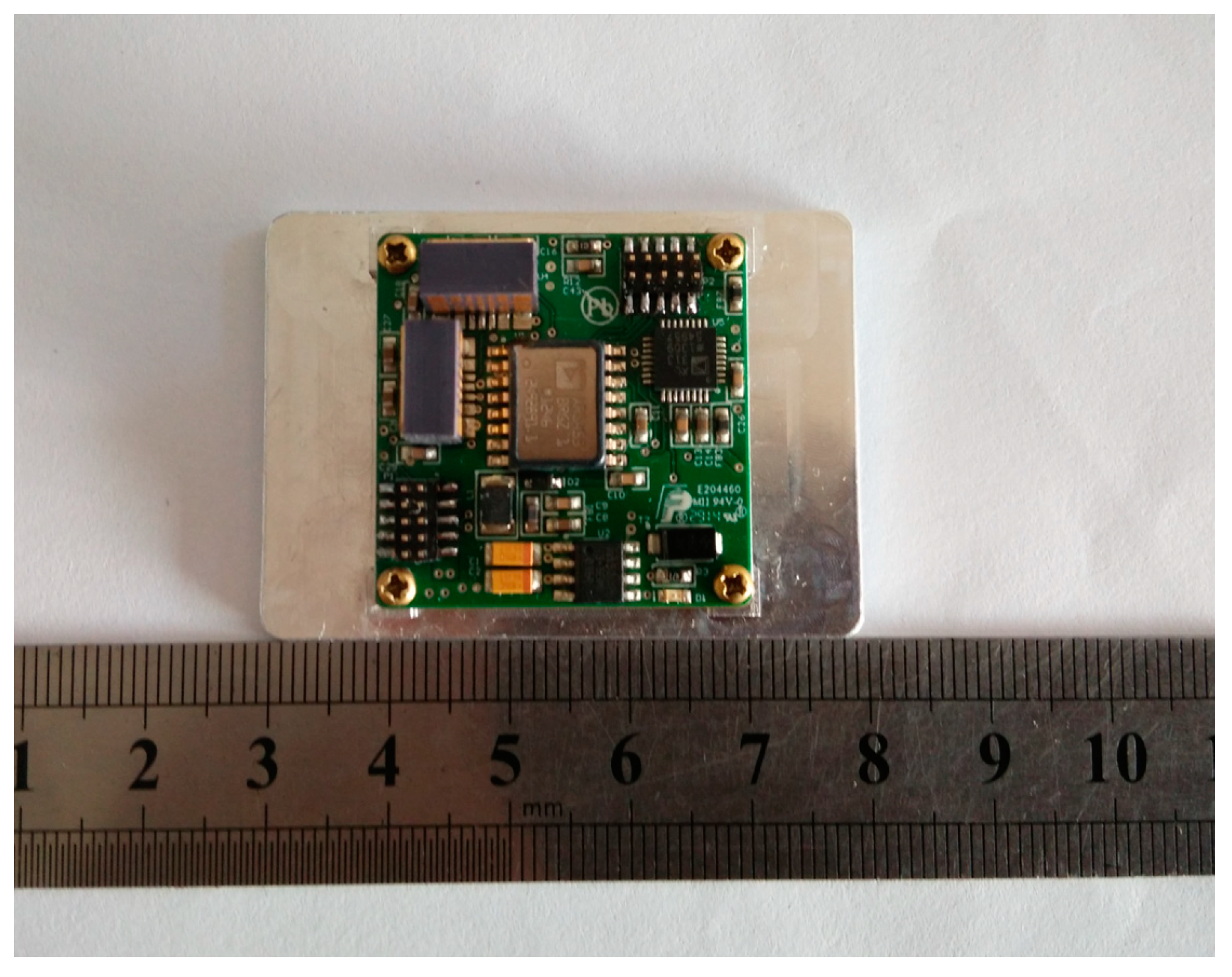
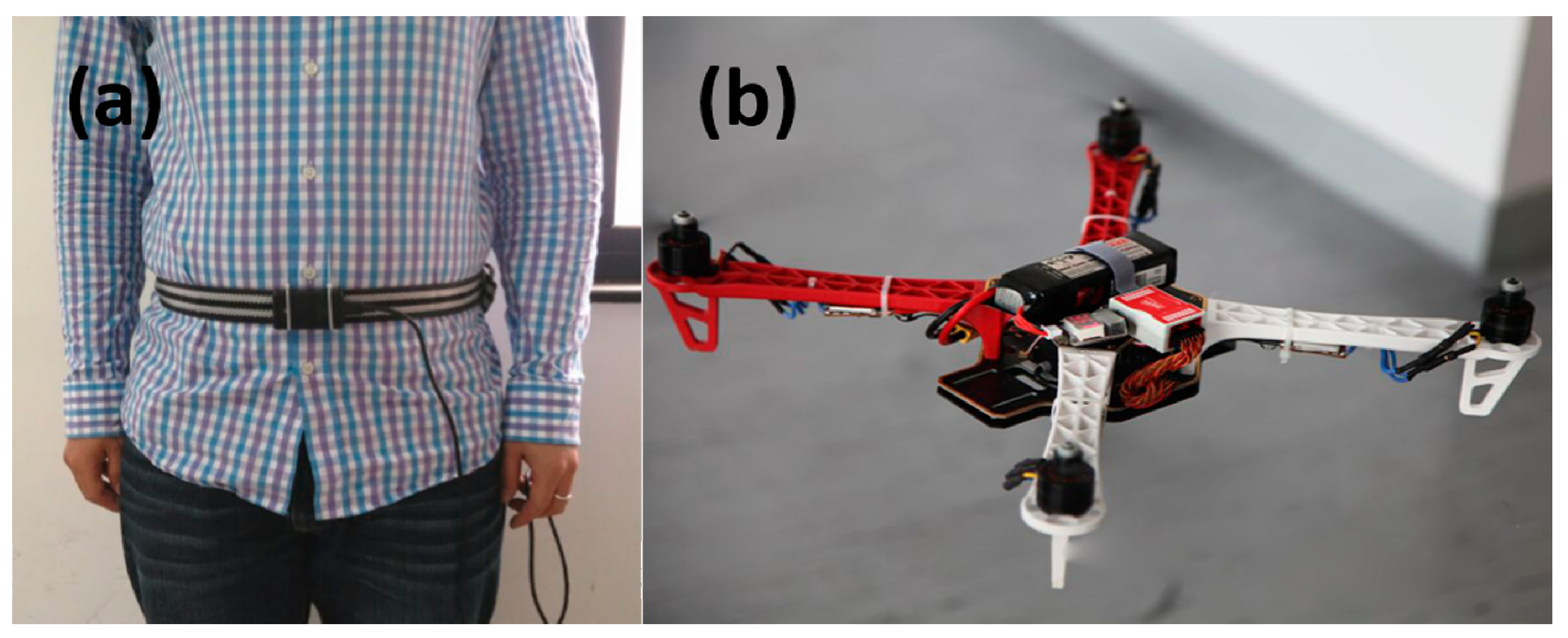
2. Wearable Multi-Sensor System
3. Coordinate System and Heading Estimation
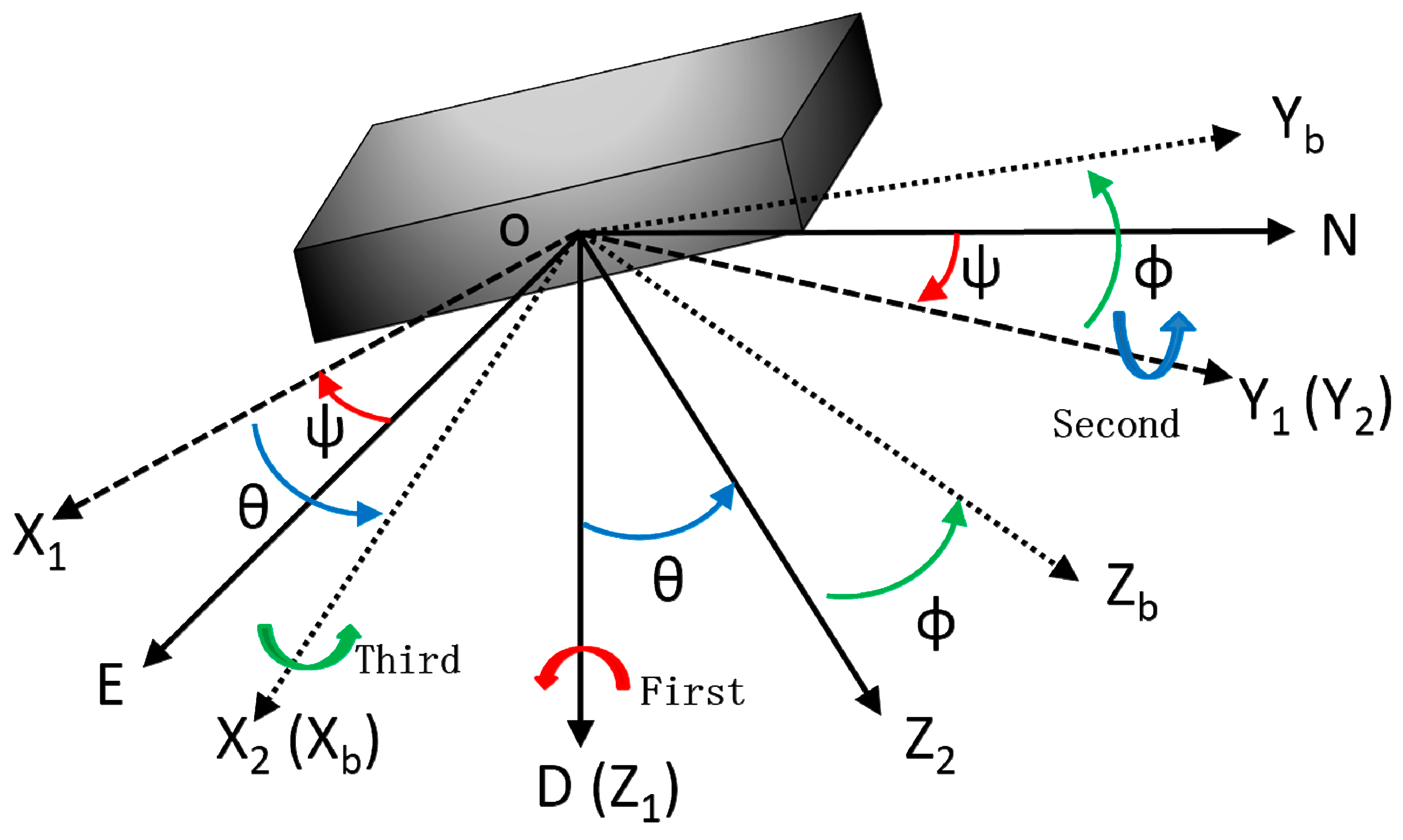
3.1. Coordinate Systems
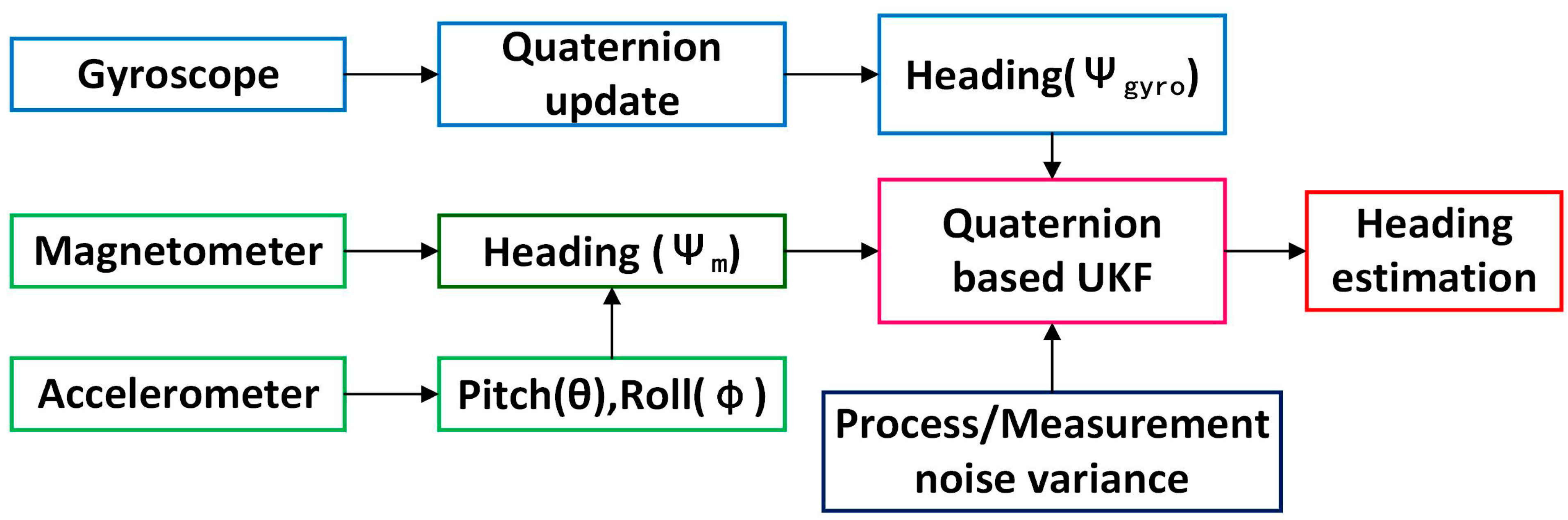
3.2. Heading Estimation
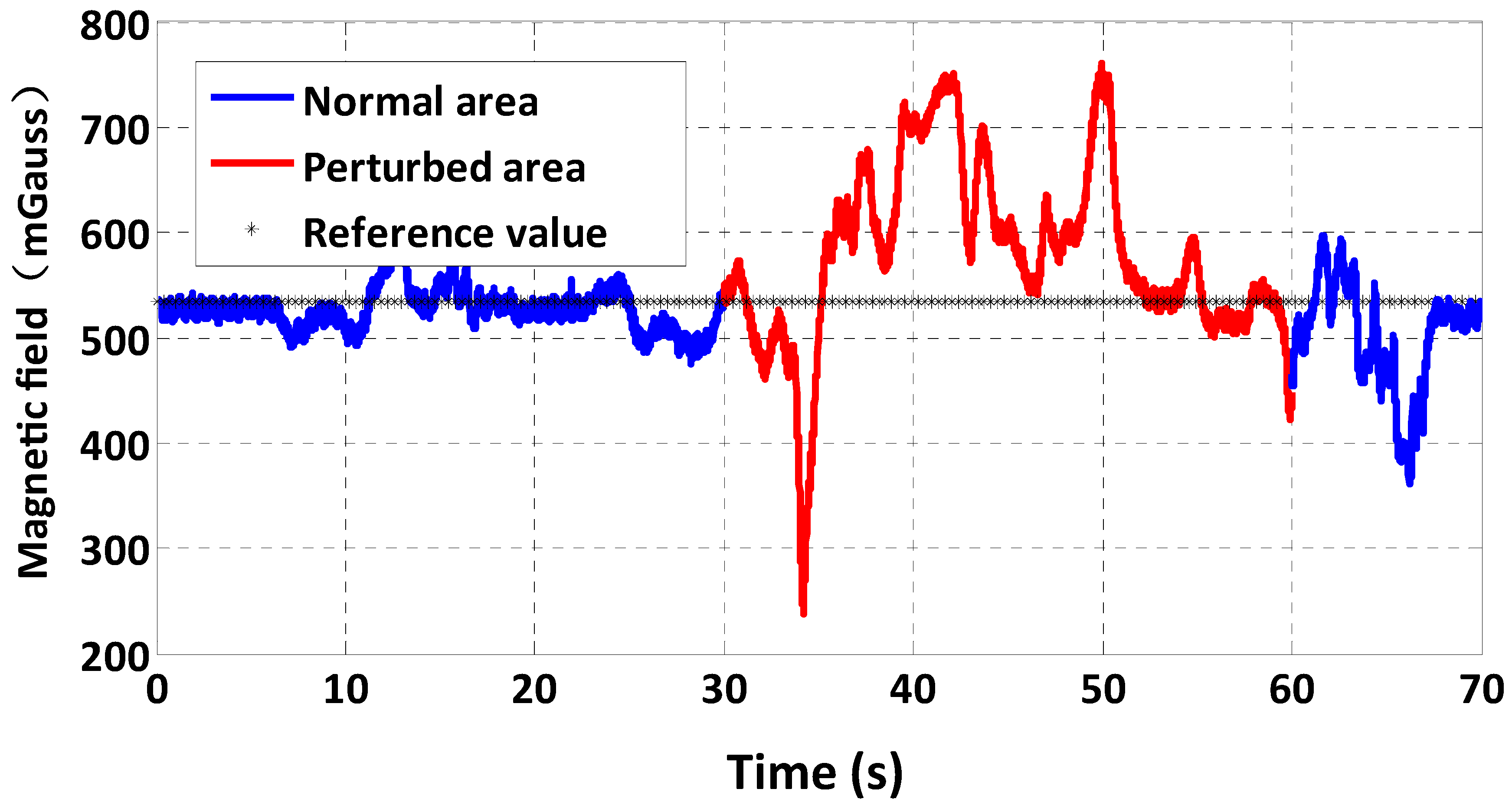
3.2.1. Heading Estimation Using a Magnetometer
3.2.2. Heading Estimation Using a Gyroscope
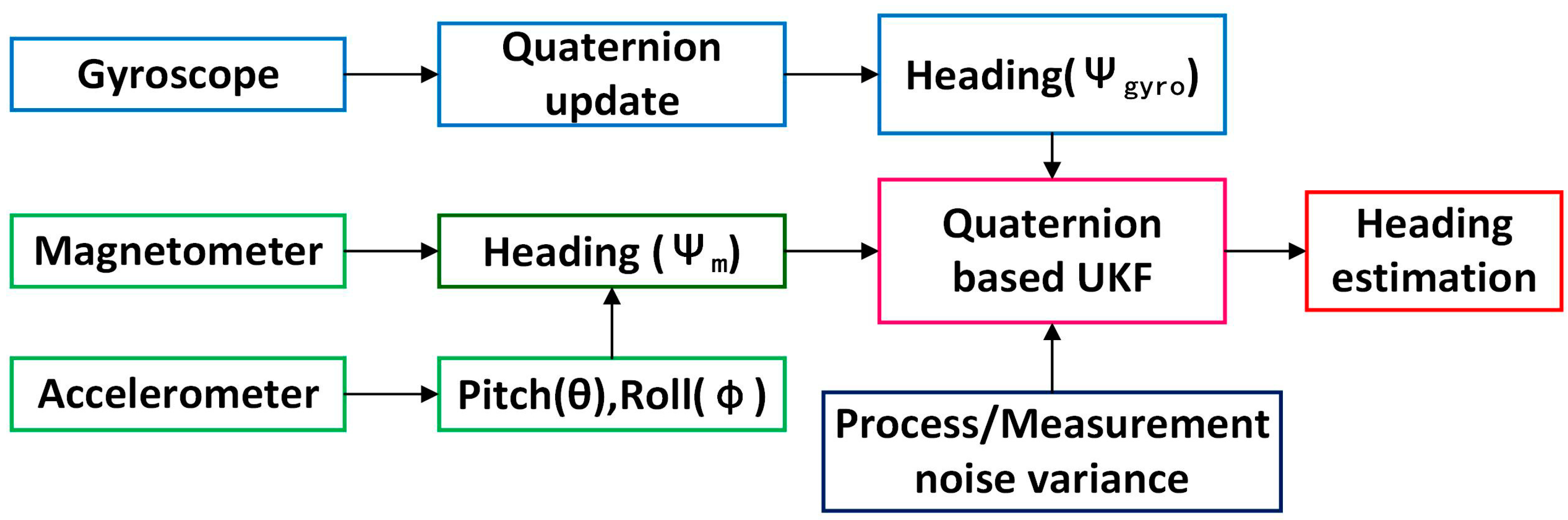
4. Quaternion-Based UKF
4.1. Kalman Filter Design
4.2. Covariance of Process Noise and Measurement Noise
4.3. Unscented Transformation
4.4. UKF Algorithm Equations
5. Experiments and Result Analysis
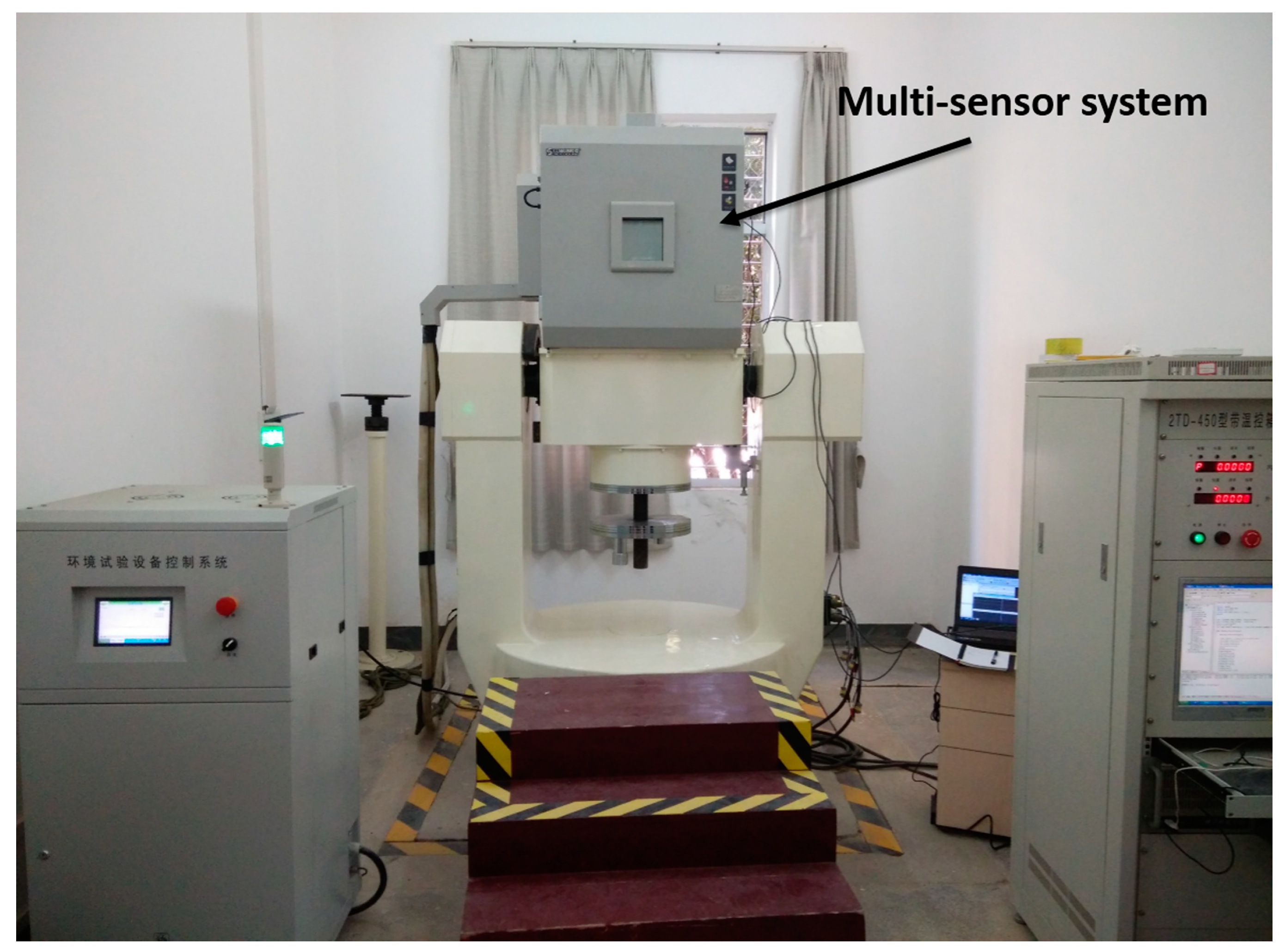
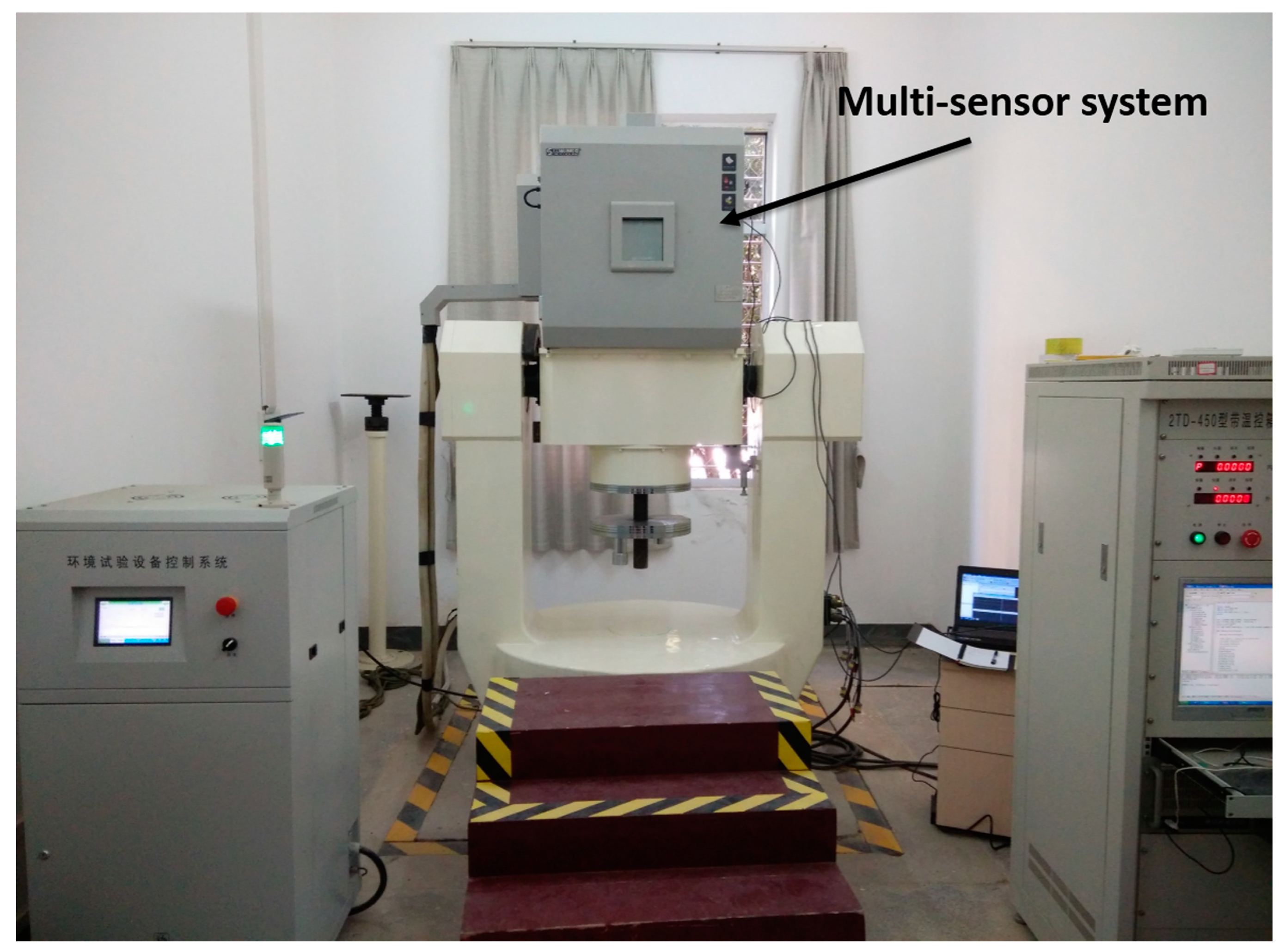
5.1. Two-Axis Turntable Test of Multi-Sensor System
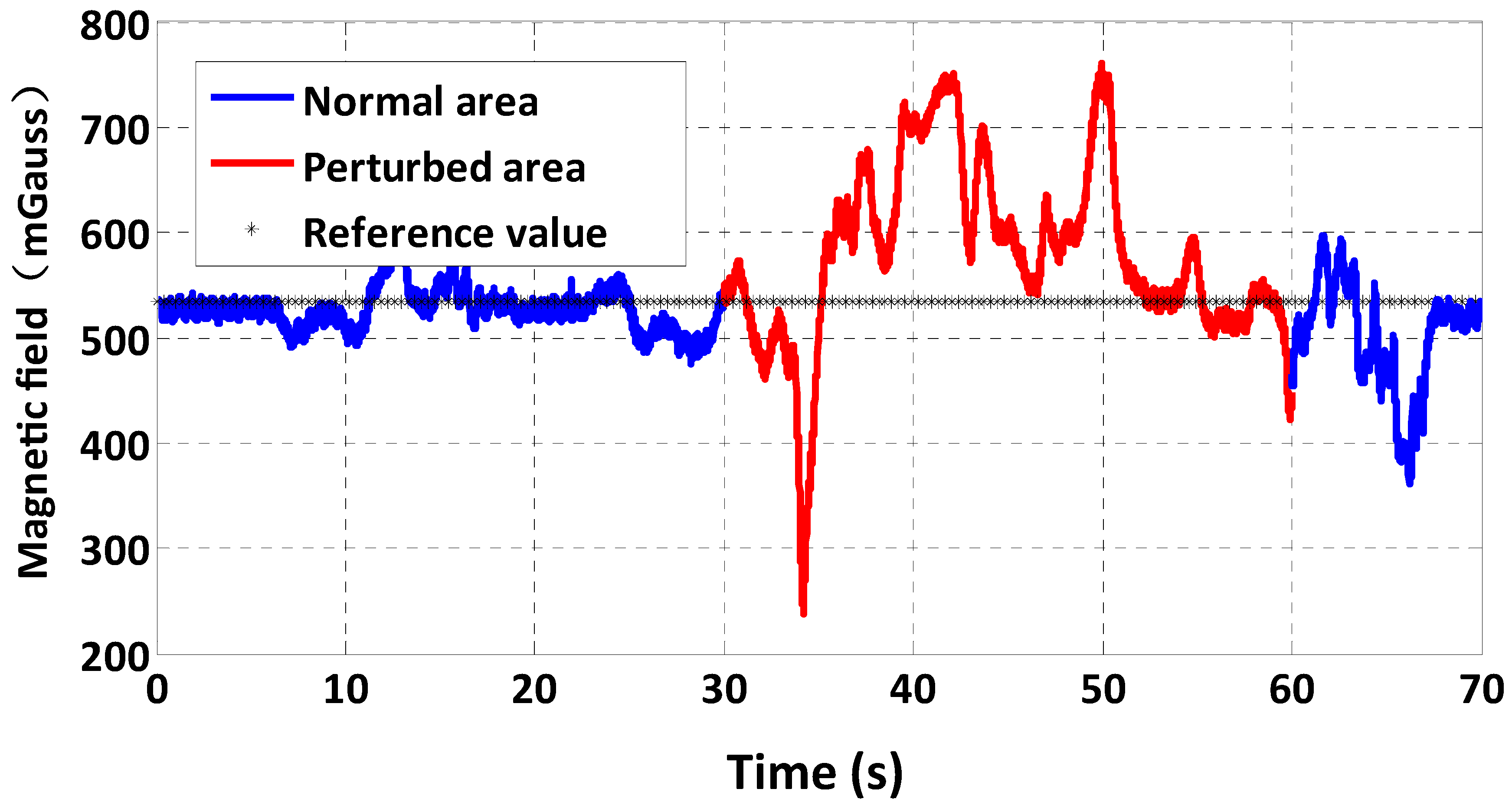
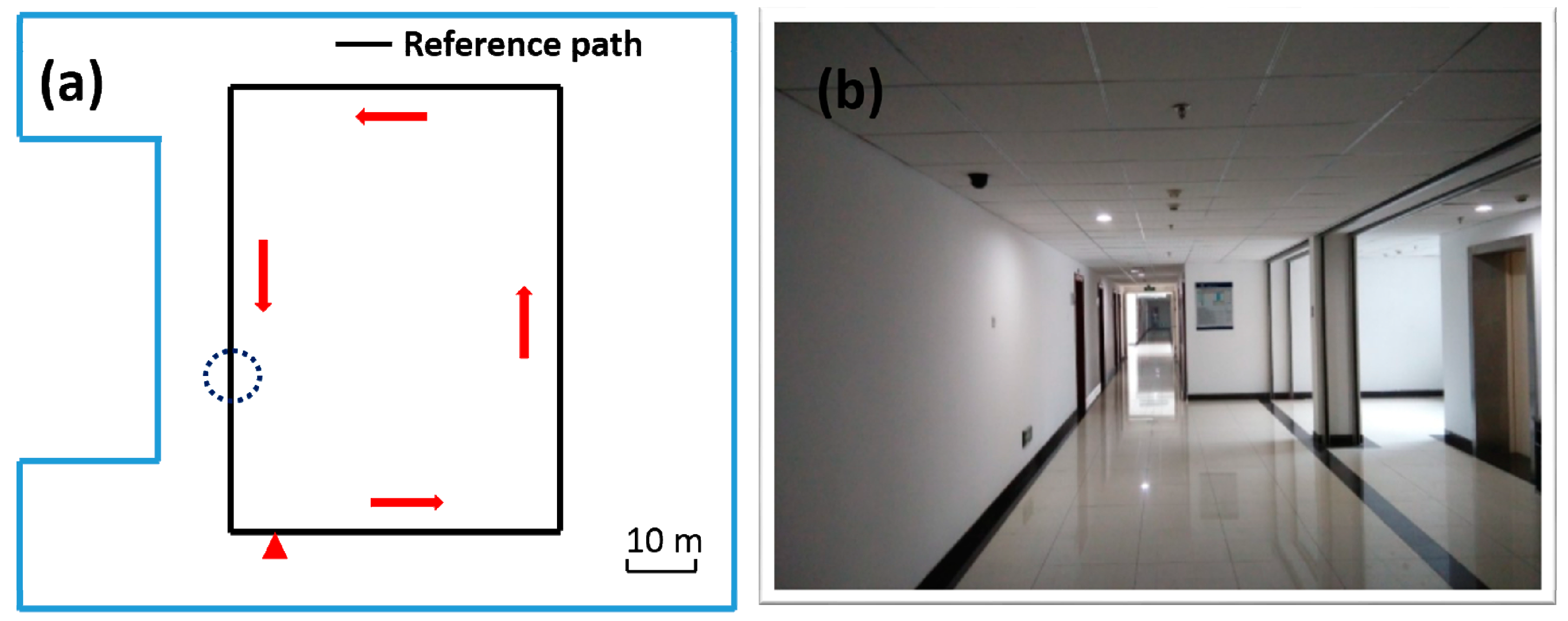
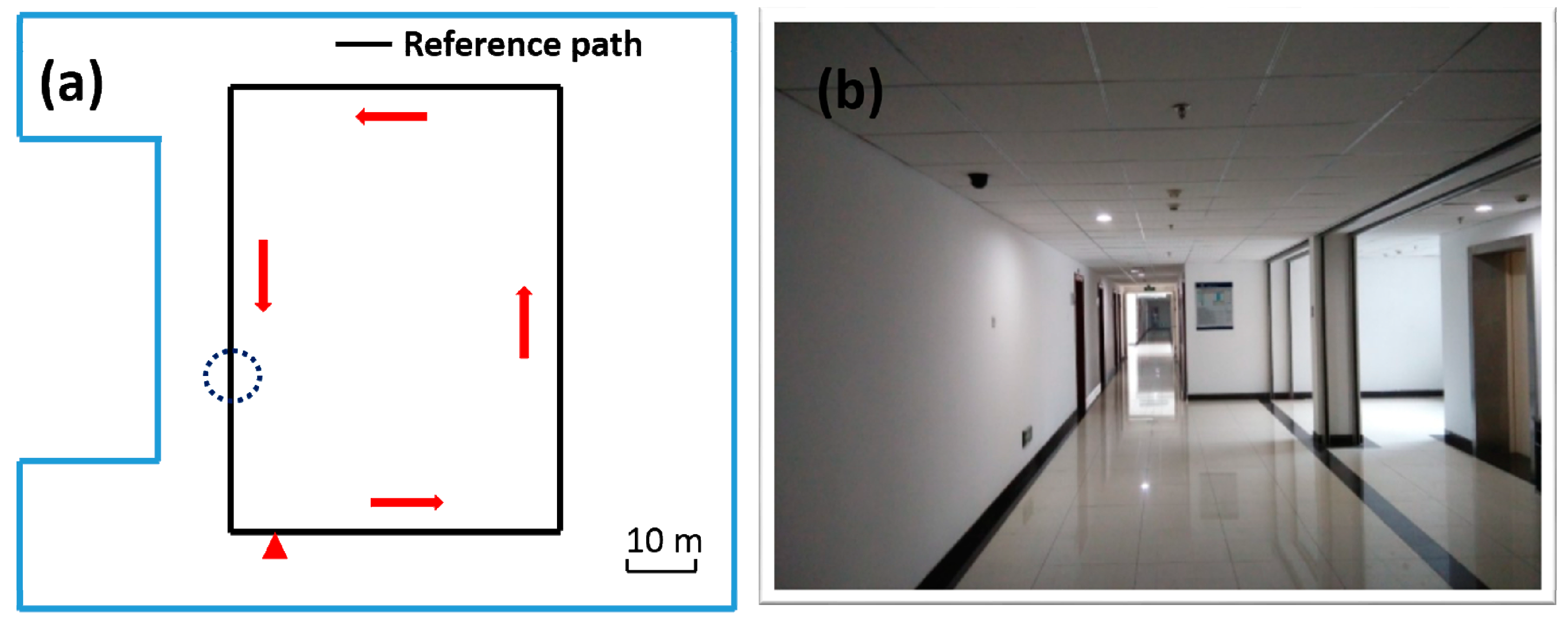
5.2. Indoor Heading Experiments
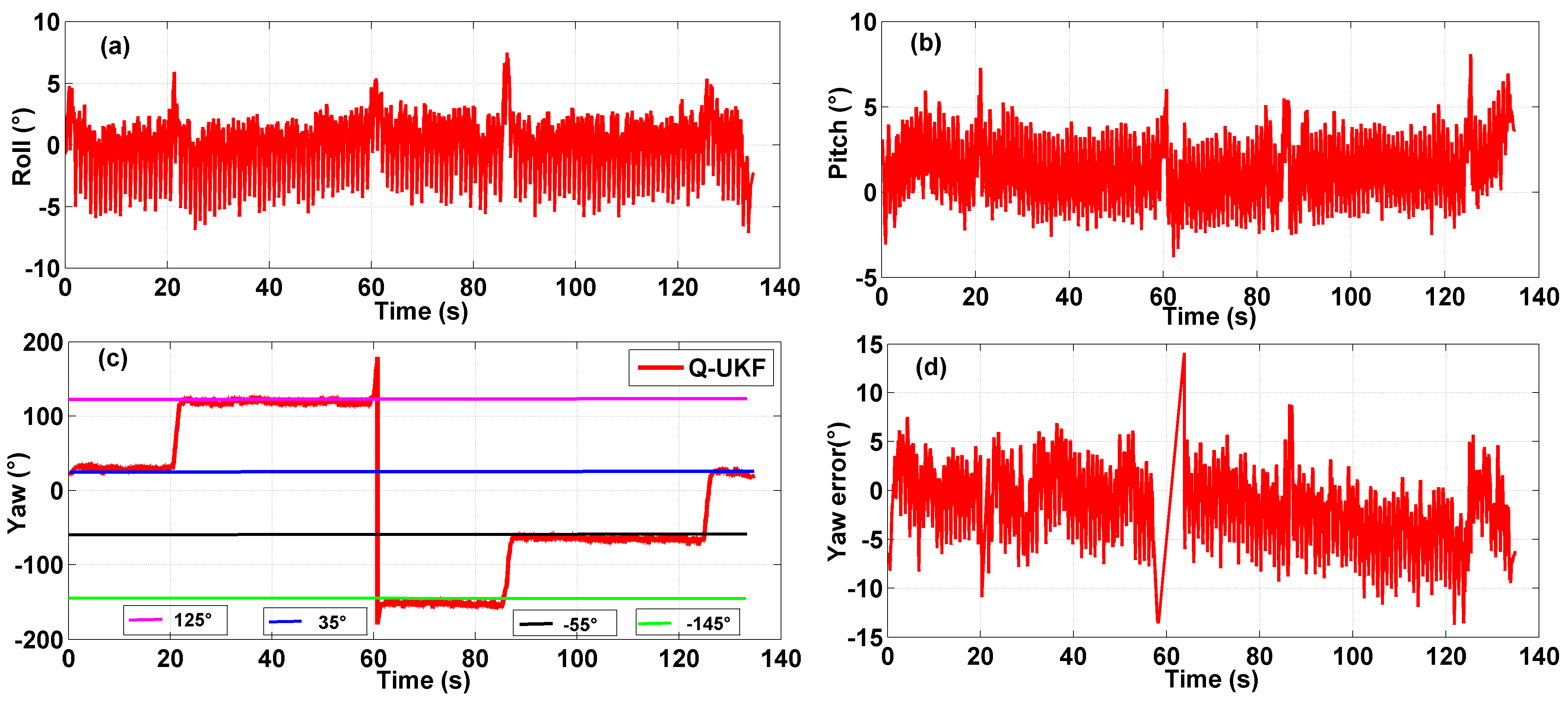
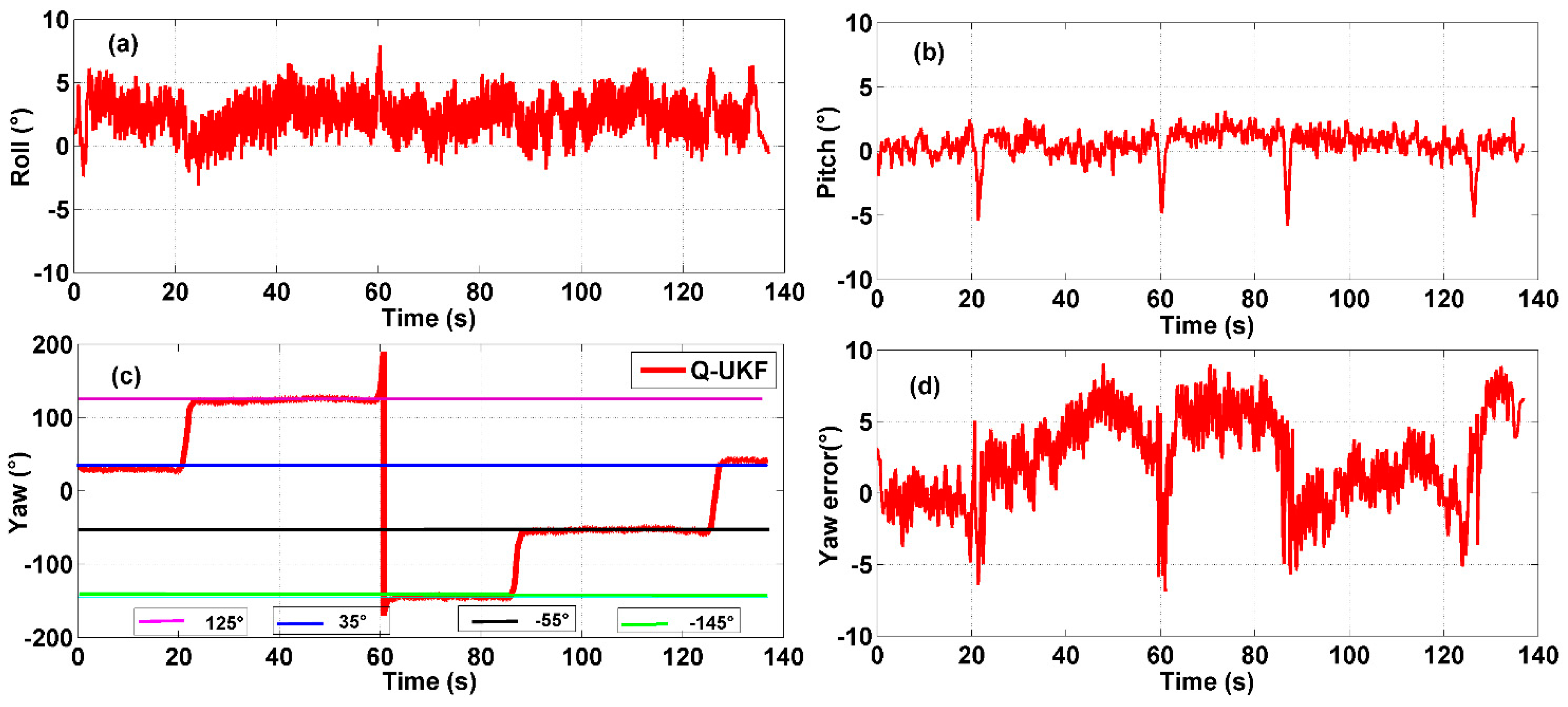
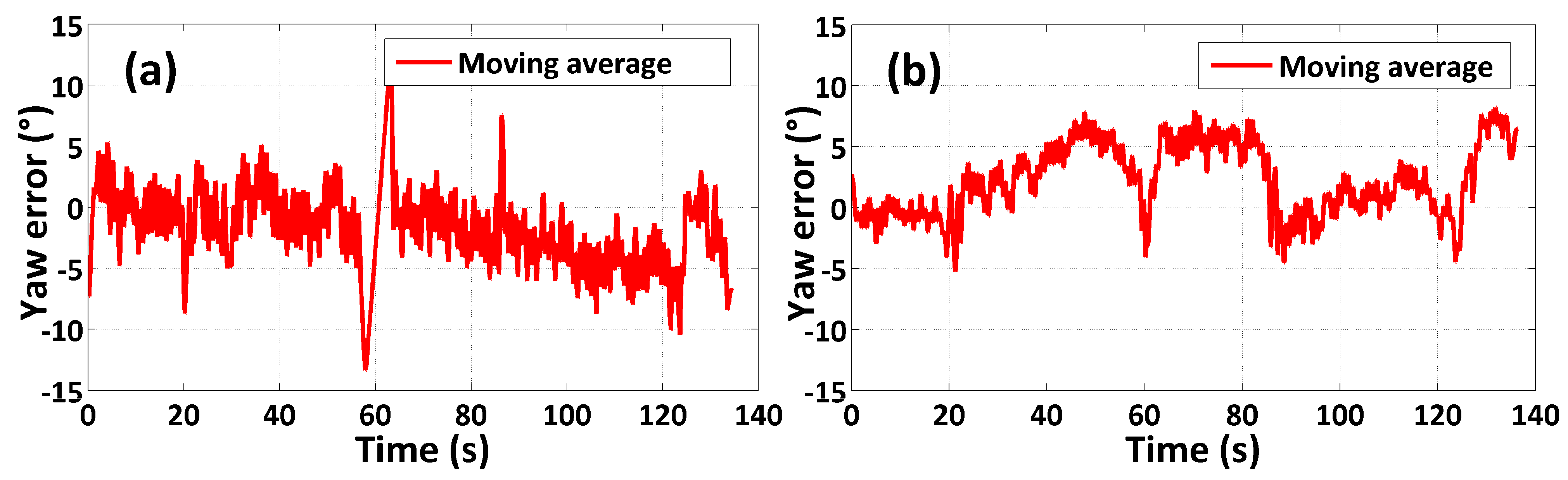
5.3. Result Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, J.; Chen, R.; Pei, L.; Guinness, R.; Kuusniemi, H. A Hybrid Smartphone Indoor Positioning Solution for Mobile LBS. Sensors 2012, 12, 17208–17233. [Google Scholar] [CrossRef] [PubMed]
- Pei, L.; Liu, J.; Guinness, R.; Chen, Y.; Kuusniemi, H.; Chen, R. Using LS-SVM Based Motion Recognition for Smartphone Indoor Wireless Positioning. Sensors 2012, 12, 6155–6175. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Law, C.L.; Guan, Y.L.; Chin, F. Indoor Elliptical Localization Based on Asynchronous UWB Range Measurement. IEEE Trans. Instrum. Measure. 2011, 60, 248–257. [Google Scholar] [CrossRef]
- Zhuang, Y.; Chang, H.W.; El-Sheimy, N. A MEMS Multi-Sensors System for Pedestrian Navigation. In China Satellite Navigation Conference (CSNC) 2013 Proceedings; Springer: Berlin, Germany, 2013; pp. 651–660. [Google Scholar]
- Zhuang, Y.; Shen, Z.; Syed, Z.; Georgy, J.; Syed, H.; El-Sheimy, N. Autonomous Wlan Heading and Position for Smartphones. In Proceedings of IEEE/ION Position, Location and Navigation Symposium 2014, Monterey, CA, USA, 5–8 May 2014; pp. 1113–1121.
- Eom, W.; Park, J.; Lee, J. Hazardous Area Navigation with Temporary Beacons. Int. J. Control Autom. Syst. 2010, 8, 1082–1090. [Google Scholar] [CrossRef]
- Zhuang, Y.; Syed, Z.; Georgy, J.; El-Sheimy, N. Autonomous Smartphone-Based WiFi Positioning System by Using Access Points Localization and Crowdsourcing. Perv. Mob. Comput. 2015, 18, 118–136. [Google Scholar] [CrossRef]
- Paul, A.; Wan, E. WiFi Based Indoor Localization and Tracking Using Sigma-Point Kalman Filtering Methods. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 646–659.
- Llorca, D.F.; Sotelo, M.A.; Parra, I.; Ocaña, M.; Bergasa, L.M. Error Analysis in a Stereo Vision-Based Pedestrian Detection Sensor for Collision Avoidance Applications. Sensors 2010, 10, 3741–3758. [Google Scholar] [CrossRef] [PubMed]
- Parnian, N.; Golnaraghi, F. Integration of a Multi-Camera Vision System and Strapdown Inertial Navigation System (SDINS) with a Modified Kalman Filter. Sensors 2010, 10, 5378–5394. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.Y.; Yoon, K.S.; Lee, D.H.; Lee, M.H. The Localization of a Mobile Robot Using a Pseudolite Ultrasonic System and a Dead Reckoning Integrated System. Int. J. Control Autom. Syst. 2011, 9, 339–347. [Google Scholar] [CrossRef]
- Hazas, M.; Hopper, A. Broadband Ultrasonic Location Systems for Improved Indoor Positioning. IEEE Trans. Mob. Comput. 2006, 5, 536–547. [Google Scholar] [CrossRef]
- Sobers, D.; Yamaura, S.; Johnson, E.N. Laser-Aided Inertial Navigation for Self-Contained Autonomous Indoor Flight. In Proceedings of the AIAA Guidance, Navigation, and Control Conference (GNC’10), Toronto, ON, Canada, 2–5 August 2010; pp. 1–58.
- Saad, S.S.; Nakad, Z.S. A Standalone RFID Indoor Positioning System Using Passive Tags. IEEE Trans. Ind. Electron. 2011, 58, 1961–1970. [Google Scholar] [CrossRef]
- House, S.; Connell, S.; Milligan, I.; Austin, D.; Hayes, T.L.; Chiang, P. Indoor localization Using Pedestrian Dead Reckoning Updated with RFID-Based Fiducials. In Proceedings of the 2011 Annual International Conference of the IEEE on Engineering in Medicine and Biology Society (EMBC), Boston, MA, USA, 30 August–3 September 2011; pp. 7598–7601.
- Huang, C.; Liao, Z.; Zhao, L. Synergism of INS and PDR in Self-Contained Pedestrian Tracking with a Miniature Sensor Module. IEEE Sens. J. 2010, 10, 1349–1359. [Google Scholar] [CrossRef]
- Jiménez, A.R.; Seco, F.; Zampella, F.; Prieto, J.C.; Guevara, J. PDR with a Foot-Mounted IMU and Ramp Detection. Sensors 2011, 11, 9393–9410. [Google Scholar] [CrossRef] [PubMed]
- Renaudin, V.; Susi, M.; Lachapelle, G. Step Length Estimation Using Handheld Inertial Sensors. Sensors 2012, 12, 8507–8525. [Google Scholar] [CrossRef] [PubMed]
- Hong, S.K.; Park, S. Minimal-Drift Heading Measurement Using a MEMS Gyro for Indoor Mobile Robots. Sensors 2008, 8, 7287–7299. [Google Scholar] [CrossRef]
- Chung, H.; Ojeda, L.; Borenstein, J. Accurate Mobile Robot Dead-Reckoning with a Precision-Calibrated Fiber-Optic Gyroscope. IEEE Trans. Robot. Autom. 2001, 17, 80–84. [Google Scholar] [CrossRef]
- Afzal, M.H.; Renaudin, V.; Lachapelle, G. Magnetic Field Based Heading Estimation for Pedestrian Navigation Environments. In Proceedings of the International Conference on Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011; pp. 1–10.
- Moafipoor, S.; Grejner-Brzezinska, D.; Toth, C. Adaptive Calibration of a Magnetometer Compass for a Personal Navigation System. In Proceedings of the International Global Navigation Satellite Systems Society (IGNSS Symposium 2007), Sydney, Australia, 4–6 December 2007.
- Renaudin, V.; Afzal, H.; Lachapelle, G. Complete Tri-Axis Magnetometer Calibration in the Magnetic Field Domain. J. Sens. 2010, 2010, 967245:1–967245:10. [Google Scholar] [CrossRef]
- Angermann, M.; Frassl, M.; Doniec, M.; Julian, B.J.; Robertson, P. Characterization of the Indoor Magnetic Field for Applications in Localization and Mapping. In Proceedings of the International Conference on Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012; pp. 1–9.
- Fan, C.; You, Z. Highly Efficient Sigma Point Filter for Spacecraft Attitude and Rate Estimation. Math. Prob. Eng. 2010, 2009. [Google Scholar]
- Roetenberg, D.; Luinge, H.J.; Baten, C.T.; Veltink, P.H. Compensation of Magnetic Disturbances Improves Inertial and Magnetic Sensing of Human Body Segment Orientation. IEEE Trans. Neural Syst. Rehabil. Eng. 2005, 13, 395–405. [Google Scholar] [CrossRef] [PubMed]
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology, 2nd ed.; Peter Peregrinus Ltd.: Stevenage, UK, 2004. [Google Scholar]
- Hong, S.K.; Ryuh, Y.S. Heading Measurements for Indoor Mobile Robots with Minimized Drift Using a MEMS Gyroscopes. In Robot Localization and Map Building; InTech: Morn Hill, Winchester, UK, 2010. [Google Scholar]
- Shin, D.; Park, S.G.; Song, B.S.; Kim, E.S.; Kupervasser, O.; Pivovartchuk, D.; Gartseev, I.; Antipov, O.; Kruchenkov, E.; Milovanov, A. Precision Improvement of MEMS Gyros for Indoor Mobile Robots with Horizontal Motion Inspired by Methods of TRIZ. In Proceedings of the 9th IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Honolulu, HI, USA, 13–16 April 2014; pp. 102–107.
- Ali, A.; El-Sheimy, N. Low-Cost MEMS-Based Pedestrian Navigation Technique for GPS-Denied Areas. J. Sens. 2013, 2013. [Google Scholar] [CrossRef]
- Renaudin, V.; Combettes, C.; Peyret, F. Quaternion Based Heading Estimation with Handheld MEMS in Indoor Environments. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2014; pp. 645–656.
- Jiménez, A.R.; Seco, F.; Prieto, J.C.; Guevara, J. Indoor Pedestrian Navigation Using an INS/EKF Framework for Yaw Drift Reduction and a Foot-Mounted IMU. In Proceedings of the 7th Workshop on Positioning, Navigation and Communication (WPNC 2010), Dresden, Germany, 11–12 March 2010; pp. 135–143.
- De Marina, H.G.; Espinosa, F.; Santos, C. Adaptive UAV Attitude Estimation Employing Unscented Kalman Filter, FOAM and Low-Cost MEMS Sensors. Sensors 2012, 12, 9566–9585. [Google Scholar] [CrossRef] [PubMed]
- Shiau, J.K.; Wang, I.C. Unscented Kalman Filtering for Attitude Determination Using Mems Sensors. J. Appl. Sci. Eng. 2013, 16, 165–176. [Google Scholar]
- Crassidis, J.L.; Markley, F.L. Unscented Filtering for Spacecraft Attitude Estimation. J. Guid. Control Dyn. 2003, 26, 536–542. [Google Scholar] [CrossRef]
- Zampella, F.; Khider, M.; Robertson, P.; Jiménez, A. Unscented Kalman Filter and Magnetic Angular Rate Update (MARU) for an Improved Pedestrian Dead-Reckoning. In Proceedings of the IEEE/ION Position Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 129–139.
- Yun, X.; Aparicio, C.; Bachmann, E.R.; McGhee, R.B. Implementation and Experimental Results of a Quaternion-Based Kalman Filter for Human Body Motion Tracking. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 317–322.
- Choukroun, D.; Bar-Itzhack, I.Y.; Oshman, Y. Novel Quaternion Kalman Filter. IEEE Trans. Aerosp. Electron. Syst. 2006, 41, 174–190. [Google Scholar] [CrossRef]
- Sabatini, A.M. Quaternion-Based Extended Kalman Filter for Determining Orientation by Inertial and Magnetic Sensing. IEEE Trans. Biomed. Eng. 2006, 53, 1346–1356. [Google Scholar] [CrossRef]
- Suh, Y.S. Orientation Estimation Using a Quaternion-Based Indirect Kalman Filter with Adaptive Estimation of External Acceleration. IEEE Trans. Instrum. Measure. 2010, 59, 3296–3305. [Google Scholar] [CrossRef]
- LaViola, J.J. A Comparison of Unscented and Extended Kalman Filtering for Estimating Quaternion Motion. In Proceedings of the American Control Conference, Providence, RI, USA, 4–6 June 2003; pp. 2435–2440.
- Shin, E.H.; El-Sheimy, N. An Unscented Kalman Filter for In-Motion Alignment of Low-Cost IMUs. In Proceedings of the IEEE/ION Position Location and Navigation Symposium, Monterey, CA, USA, 26–29 April 2004; pp. 273–279.
- Han, S.; Wang, J. A Novel Method to Integrate IMU and Magnetometers in Attitude and Heading Reference Systems. J. Navig. 2011, 64, 727–738. [Google Scholar] [CrossRef]
- Vandyke, M.C.; Schwartz, J.L.; Hall, C.D. Unscented Kalman Filtering for Spacecraft Attitude State and Parameter Estimation. In Proceedings of the AAS/AIAA Space Flight Mechanics Conference (no. AAS 04-115), Maui, HI, USA, 8–12 February 2004.
- Zhao, L.; Nie, Q.; Guo, Q. Unscented Kalman Filtering for SINS Attitude Estimation. In Proceedings of IEEE International Conference on Control and Automation, Guangzhou, China, 30 May–1 June 2007; pp. 228–232.
- Bando, M.; Kawamata, Y.; Aoki, T. Dynamic Sensor Bias Correction for Attitude Estimation Using Unscented Kalman Filter in Autonomous Vehicle. Int. J. Innov. Comput. Inf. Control 2012, 9, 2347–2358. [Google Scholar]
- Sheng, H.; Zhang, T. MEMS-Based Low-Cost Strap-Down AHRS Research. Measurement 2015, 59, 63–72. [Google Scholar] [CrossRef]
- Ren, H.; Kazanzides, P. Investigation of Attitude Tracking Using an Integrated Inertial and Magnetic Navigation System for Hand-Held Surgical Instruments. IEEE/ASME Trans. Mechatron. 2012, 17, 210–217. [Google Scholar] [CrossRef]
- Caruso, M.J. Applications of Magnetic Sensors for Low Cost Compass Systems. In Proceedings of the IEEE/ION Position Location and Navigation Symposium, San Diego, CA, USA, 13–16 March 2000; pp. 177–184.
- Ma, D.M.; Shiau, J.K.; Wang, I.C.; Lin, Y.H. Attitude Determination Using a MEMS-Based Flight Information Measurement Unit. Sensors 2012, 12, 1–23. [Google Scholar] [CrossRef] [PubMed]
- MTi-100 Series. Available online: https://www.xsens.com/products/mti-100-series/ (accessed on 22 March 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, X.; Yu, S.; Zhang, S.; Wang, G.; Liu, S. Quaternion-Based Unscented Kalman Filter for Accurate Indoor Heading Estimation Using Wearable Multi-Sensor System. Sensors 2015, 15, 10872-10890. https://doi.org/10.3390/s150510872
Yuan X, Yu S, Zhang S, Wang G, Liu S. Quaternion-Based Unscented Kalman Filter for Accurate Indoor Heading Estimation Using Wearable Multi-Sensor System. Sensors. 2015; 15(5):10872-10890. https://doi.org/10.3390/s150510872
Chicago/Turabian StyleYuan, Xuebing, Shuai Yu, Shengzhi Zhang, Guoping Wang, and Sheng Liu. 2015. "Quaternion-Based Unscented Kalman Filter for Accurate Indoor Heading Estimation Using Wearable Multi-Sensor System" Sensors 15, no. 5: 10872-10890. https://doi.org/10.3390/s150510872
APA StyleYuan, X., Yu, S., Zhang, S., Wang, G., & Liu, S. (2015). Quaternion-Based Unscented Kalman Filter for Accurate Indoor Heading Estimation Using Wearable Multi-Sensor System. Sensors, 15(5), 10872-10890. https://doi.org/10.3390/s150510872