
Prototyping a GNSS-Based Passive Radar for UAVs: An Instrument to Classify the Water Content Feature of Lands

 ,
,  , and
, and
Abstract
:
1. Introduction
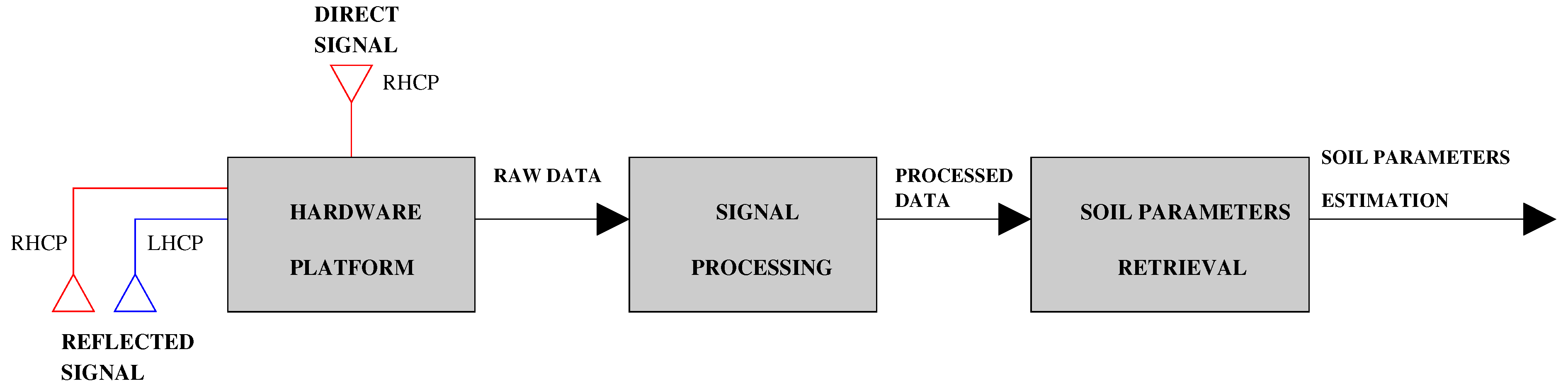
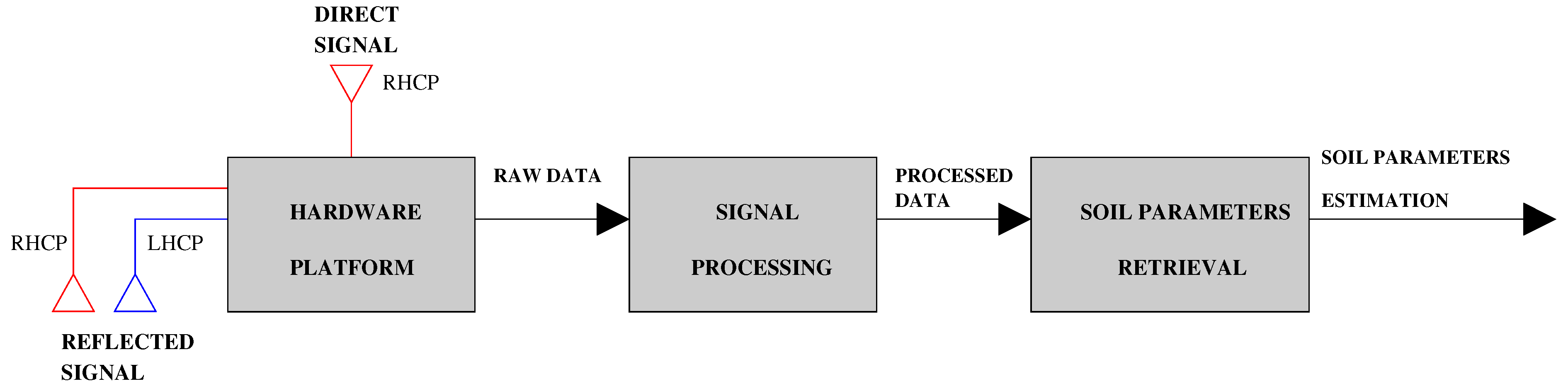
2. Rationale and Requirements
- the hardware platform,
- the GNSS signal processing and
- the signal processing for soil parameter retrieval.
3. Prototype Design
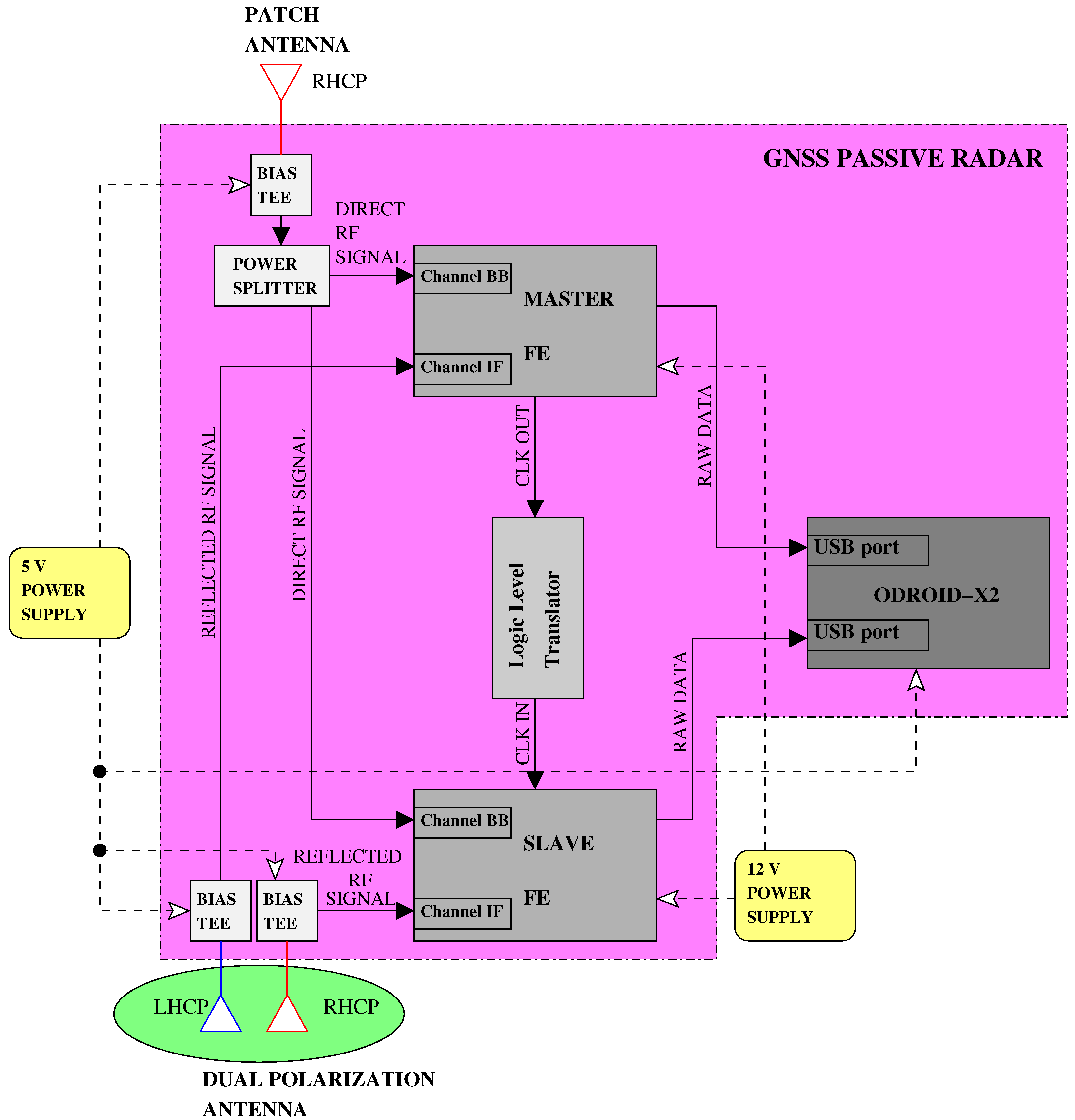
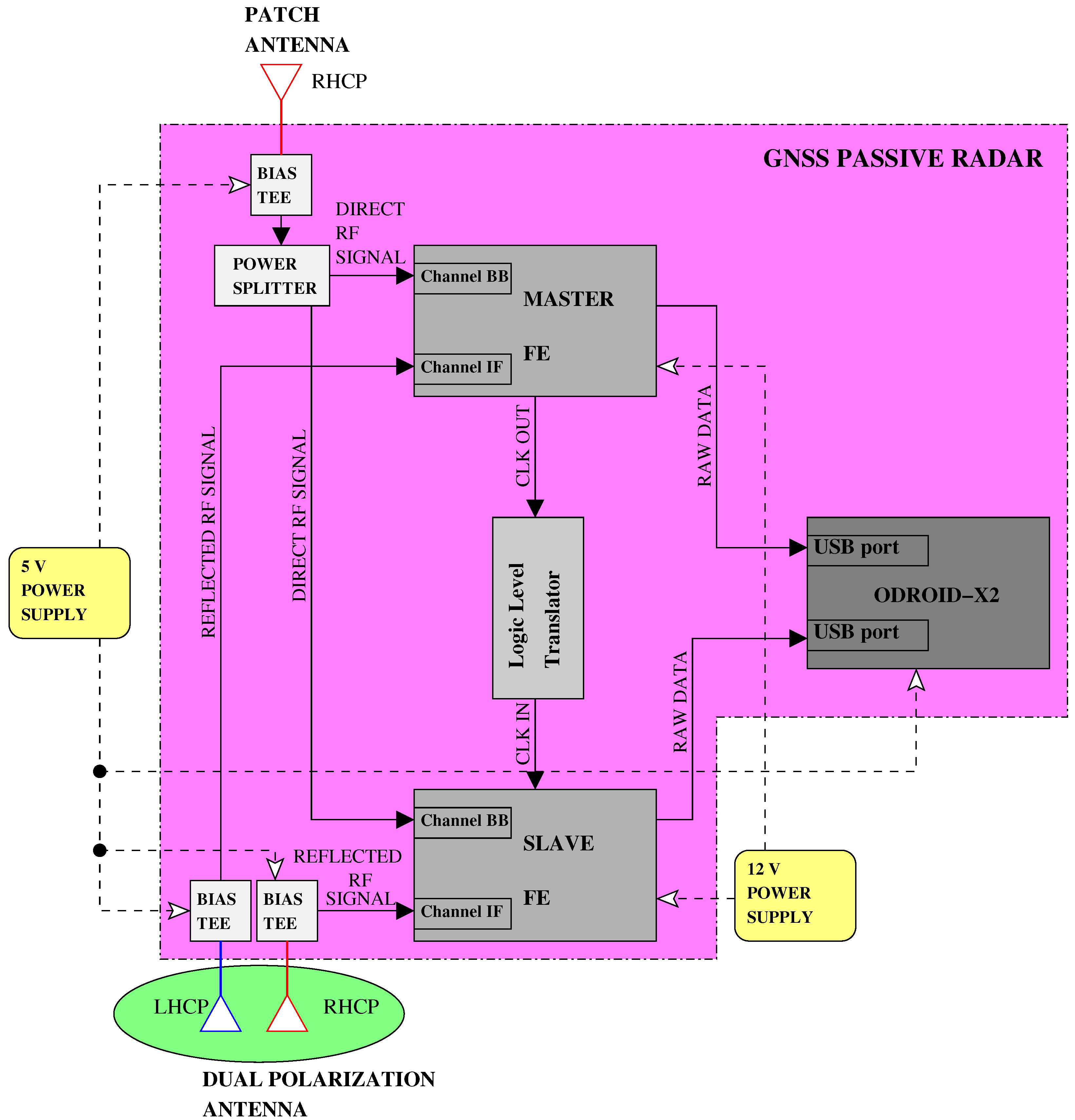
3.1. Hardware Components
- the GNSS antennas,
- the commercial off-the-shelf (COTS) RF front-ends (FEs) and
- the digital signal processing (DSP) stage.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware Component | Selected Device |
|---|---|
| Antenna (towards zenith): | Aircraft’s hemispherical L1 patch |
| Antenna (toward nadir): | Antcom dual-polarization L1/L2 1G1215RL-PP-XS-X RevA |
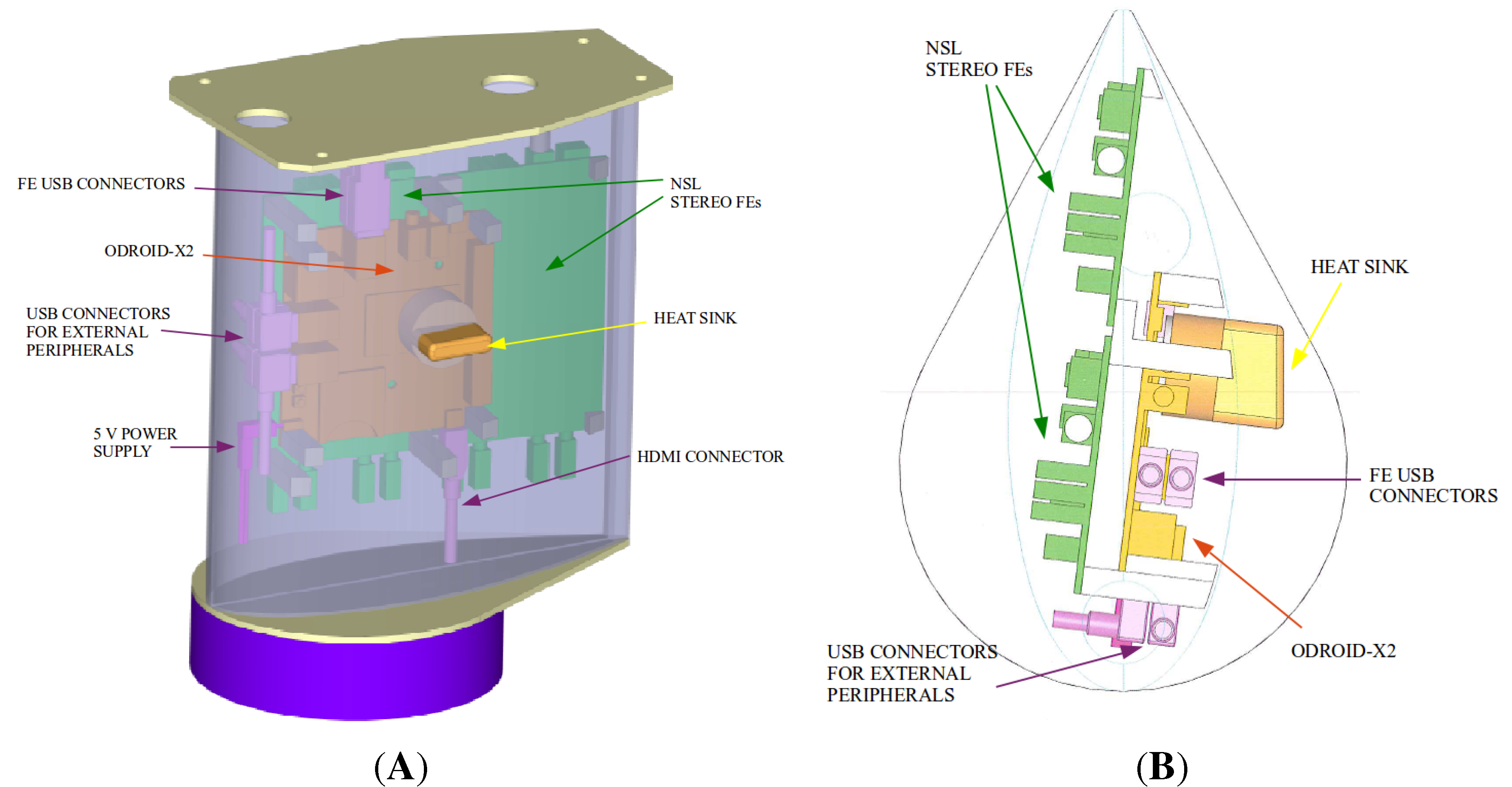
| RF front-end: | NSL Stereo (2 boards mutually synchronized) |
| DSP (μ-processor board): | ODROID-X2, 1.7 GHz ARM Cortex-A9 Quad Core platform, 2 GB RAM |
| Memory: | 64 GB eMMC |
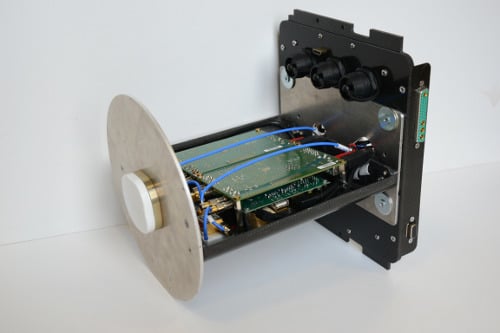
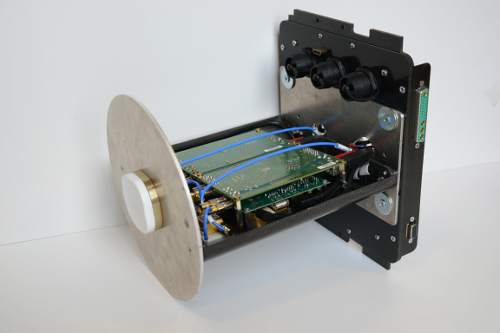
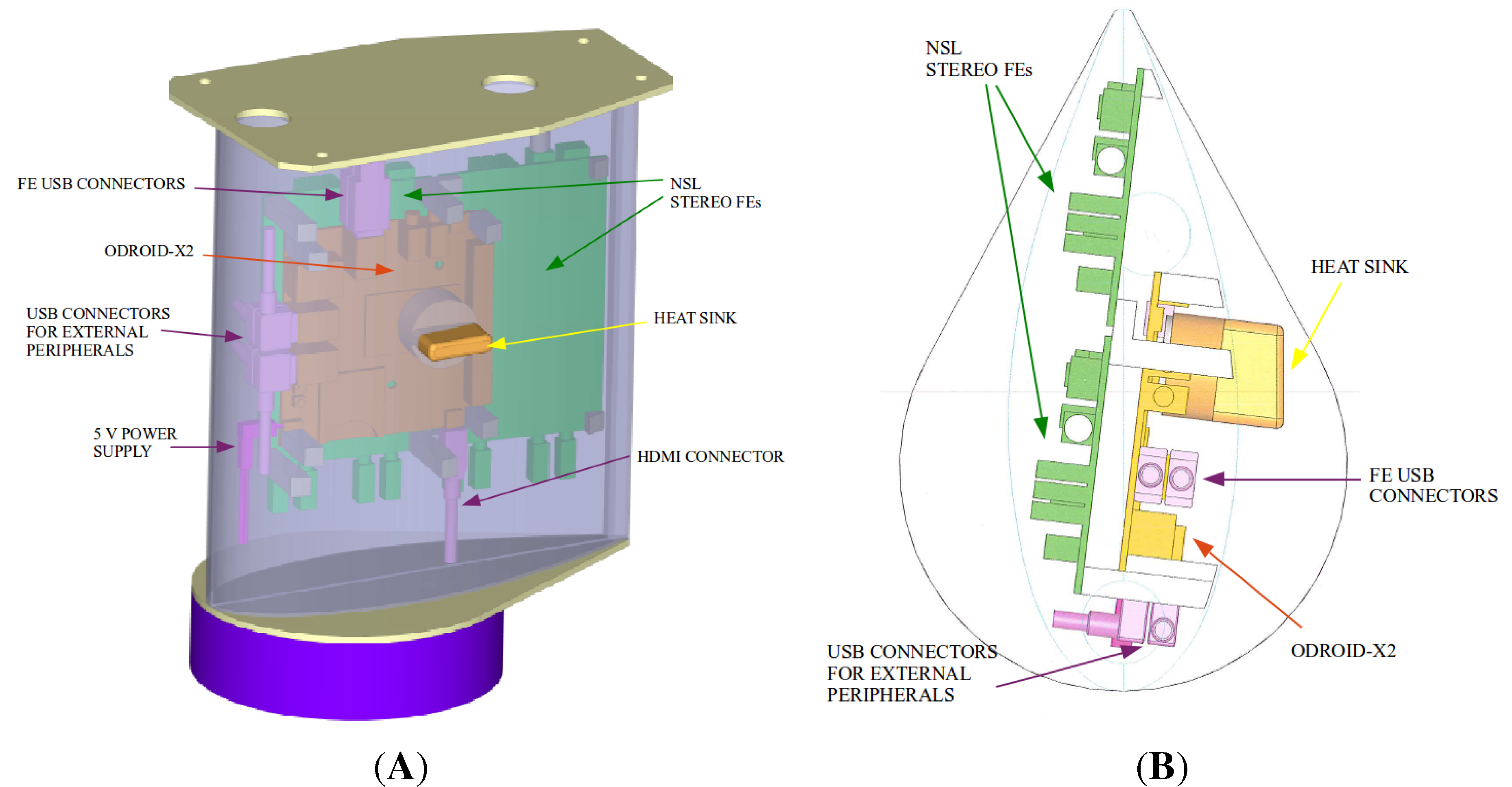
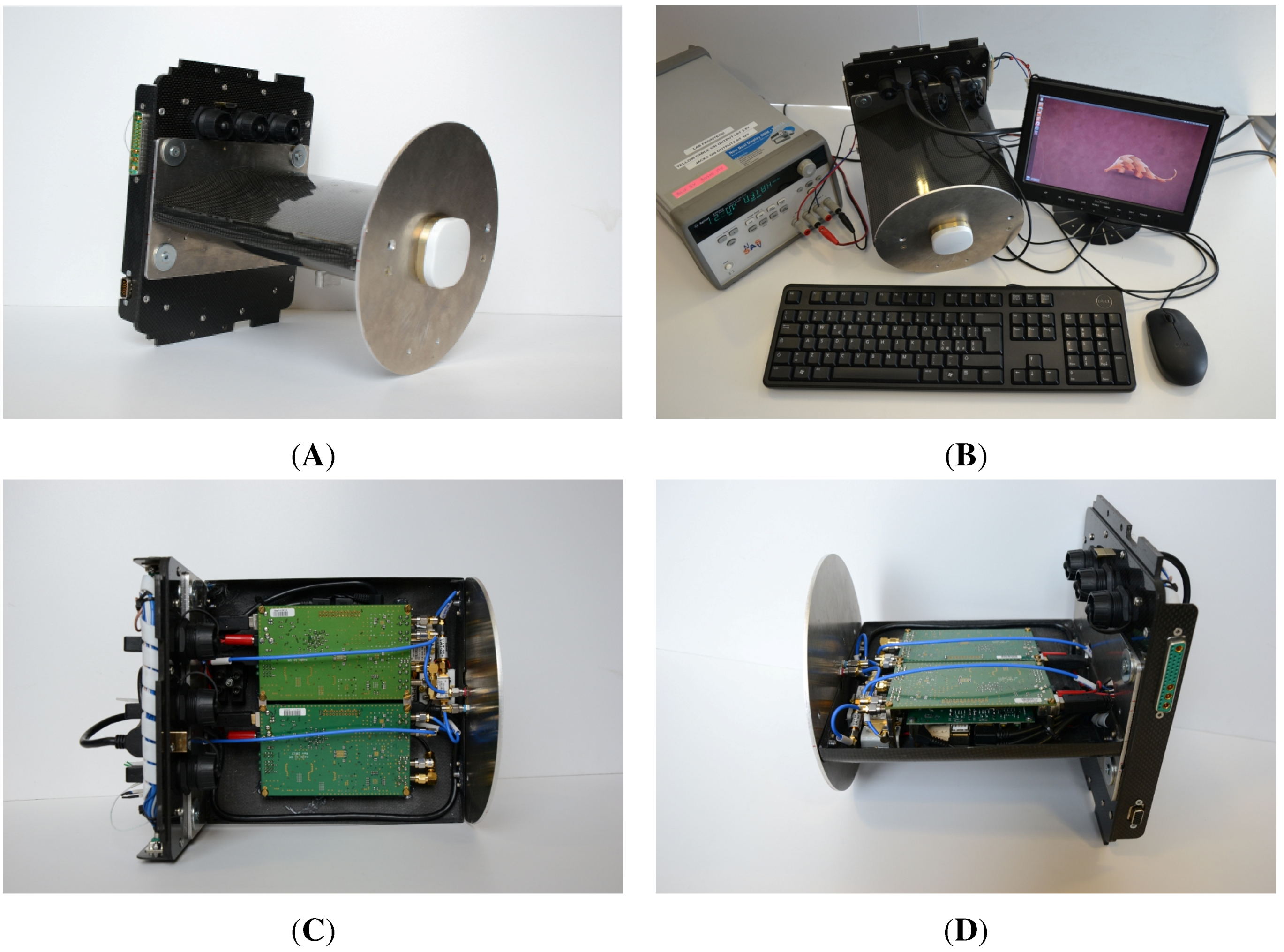
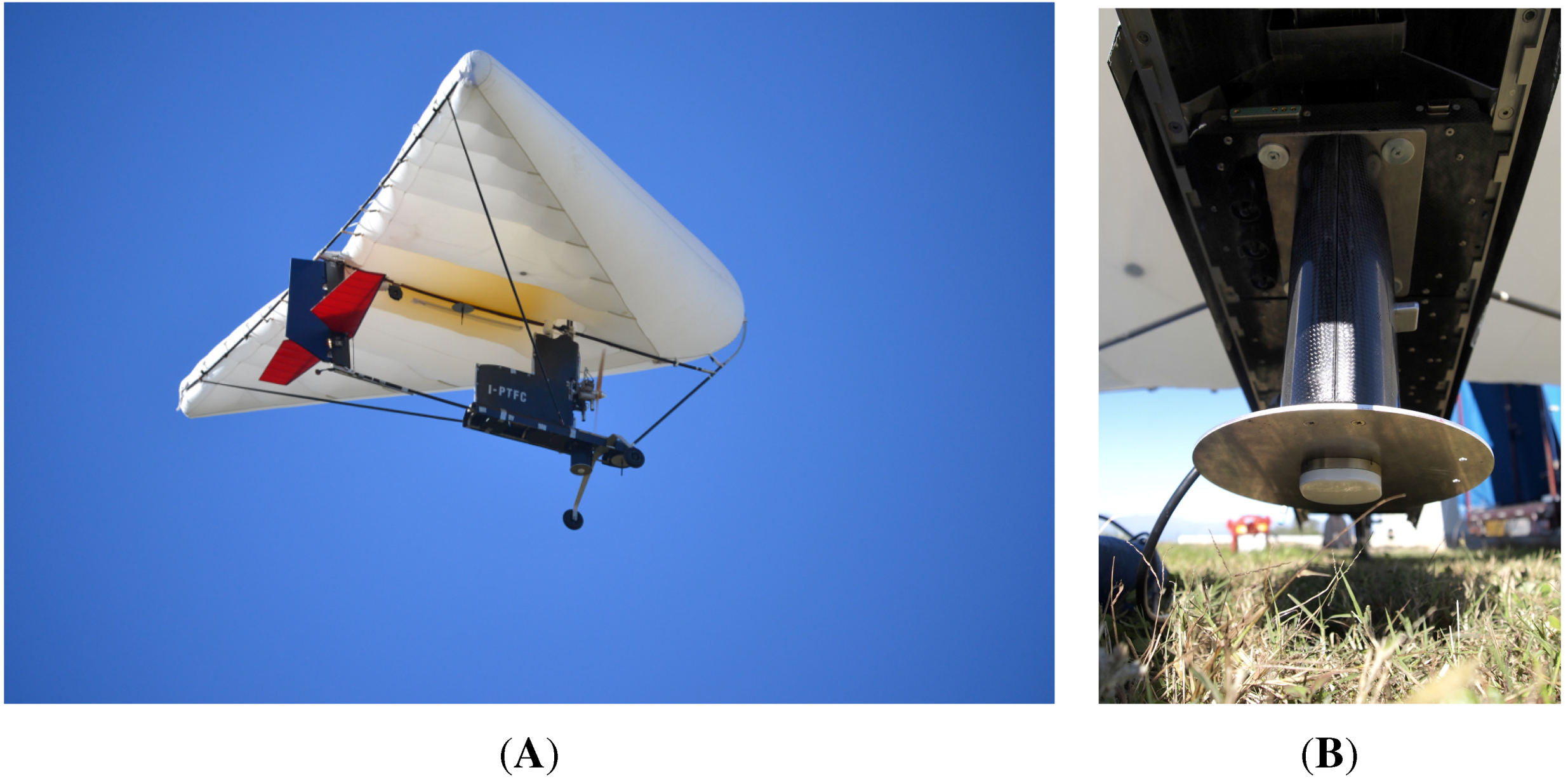
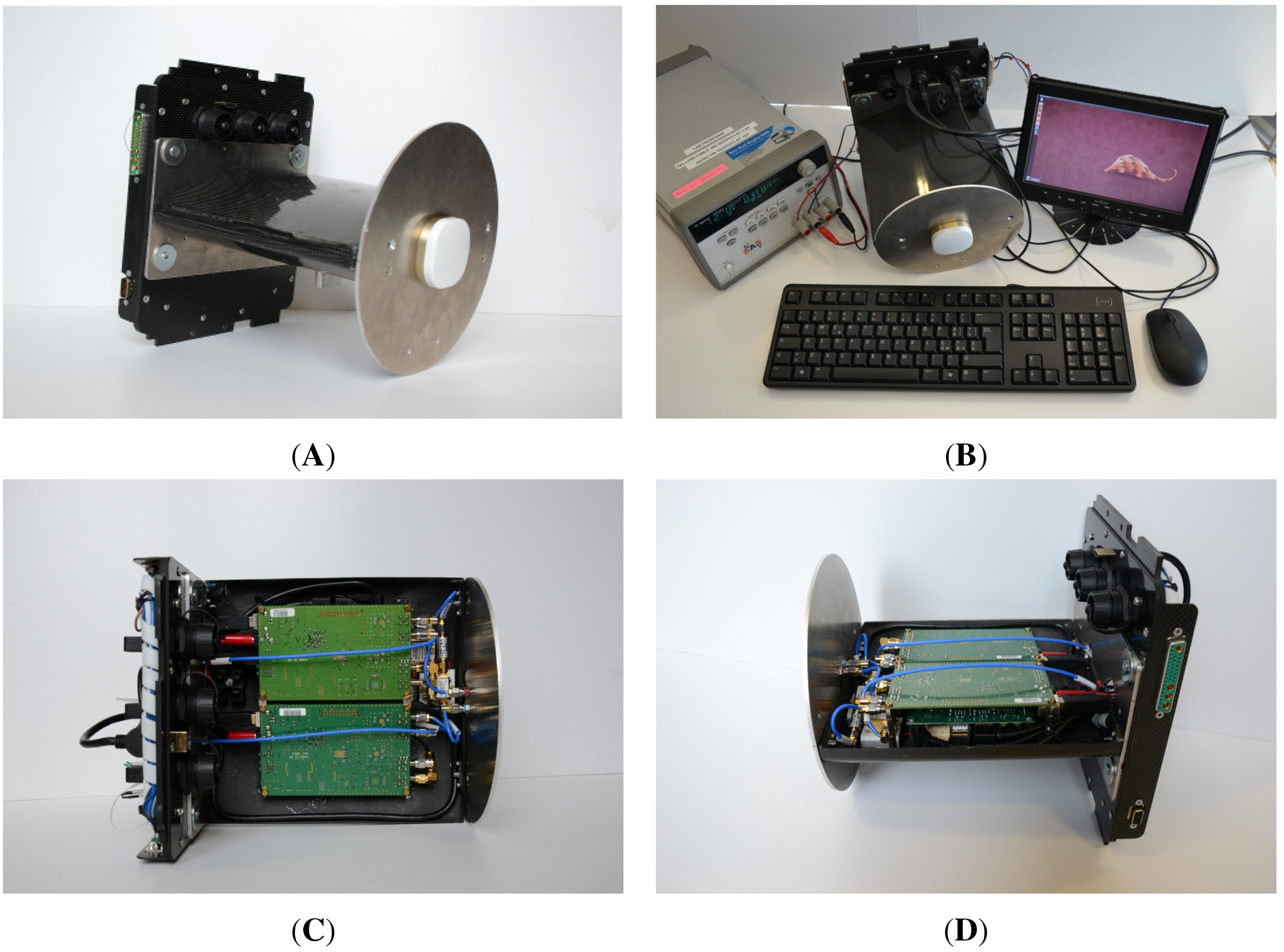
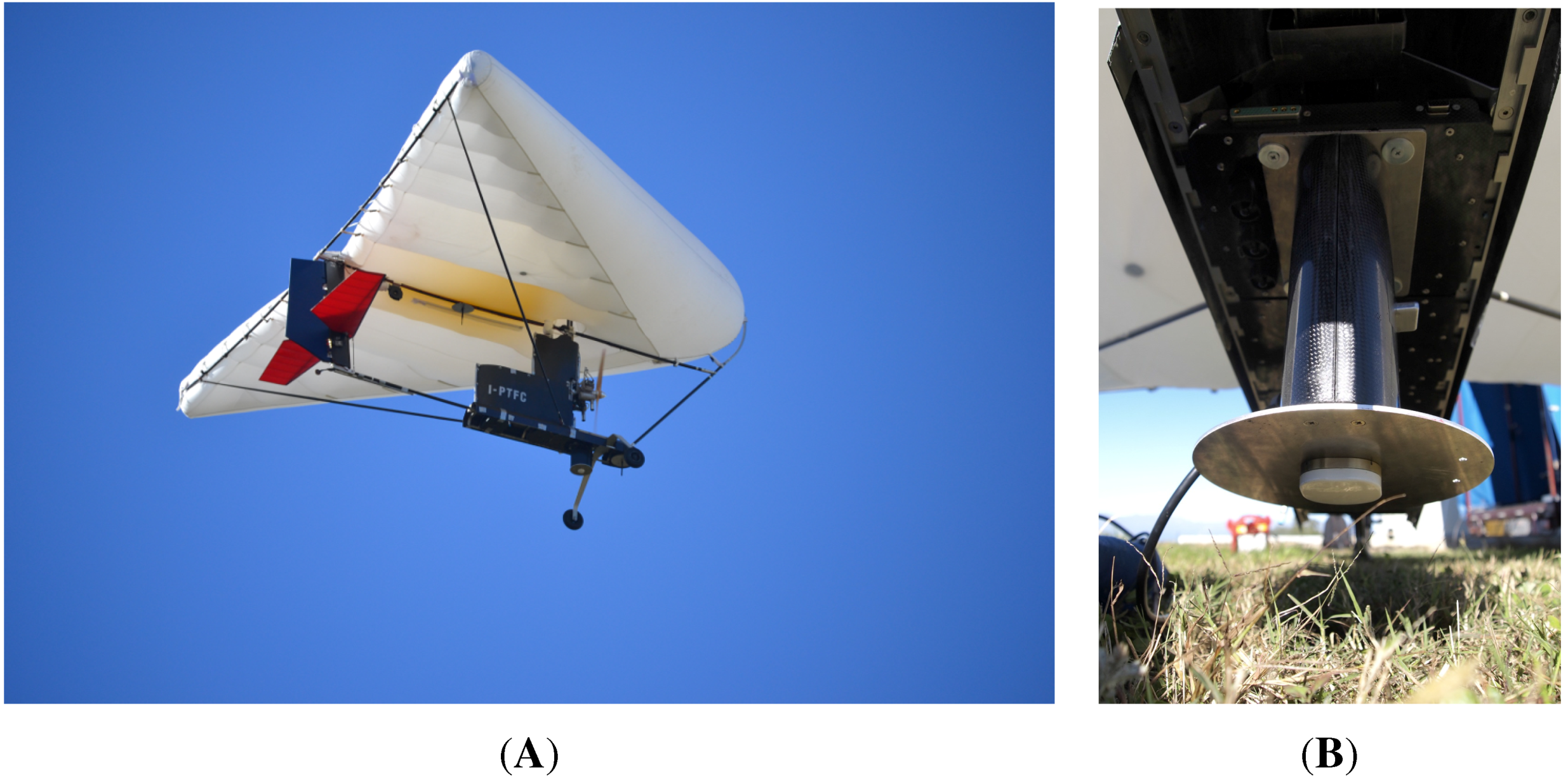
3.2. Hardware Assembly
3.3. Software Components
| Configurable Parameter | Admissible Range | Default Value |
|---|---|---|
| Sampling frequency | 13 ÷ 40 MHz | 13 MHz |
| Channel IF, carrier frequency | {L1, E1, G1} | 1575.42 MHz |
| Channel IF, intermediate frequency | Not specified | 3.55 MHz |
| Channel IF, double-sided bandwidth | 2 ÷ 9.66 MHz | 4.2 MHz |
| Channel BB, carrier frequency | {L1, E1, G1, L2, G2, L5, E5a, E5b} | 1575.42 MHz |
| Channel BB, intermediate frequency | 0 MHz | 0 MHz |
| Channel BB, single-sided bandwidth | 1.39 ÷ 10.09 MHz | 4.0 MHz |
| Channel BB, filter gain | 0 ÷ 15 dB | 6 dB |
- Basic mode: direct channel + one LHCP reflected channel (only the master FE enabled);
- Advanced mode: direct channel + two reflected channels (LHCP and RHCP).
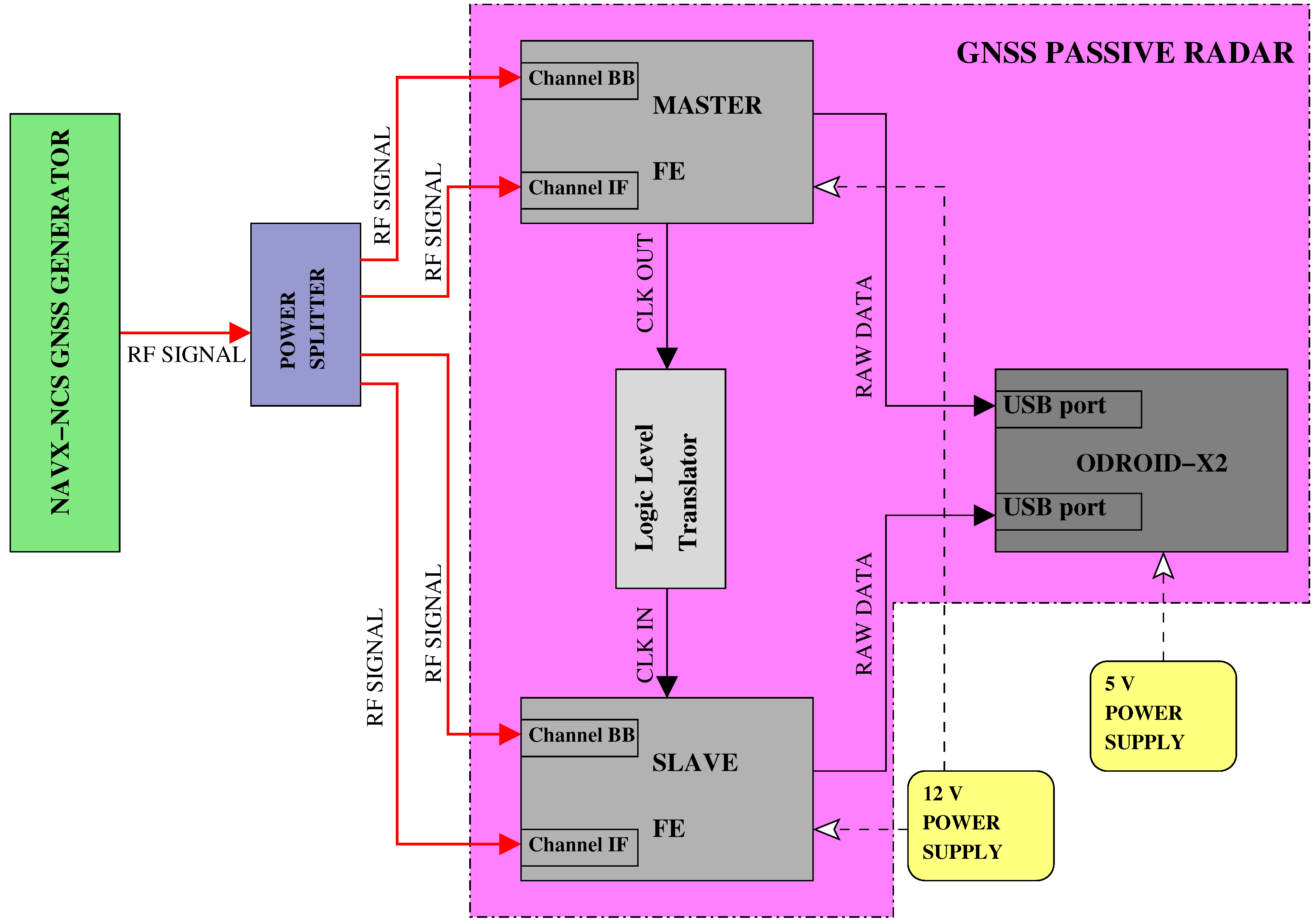
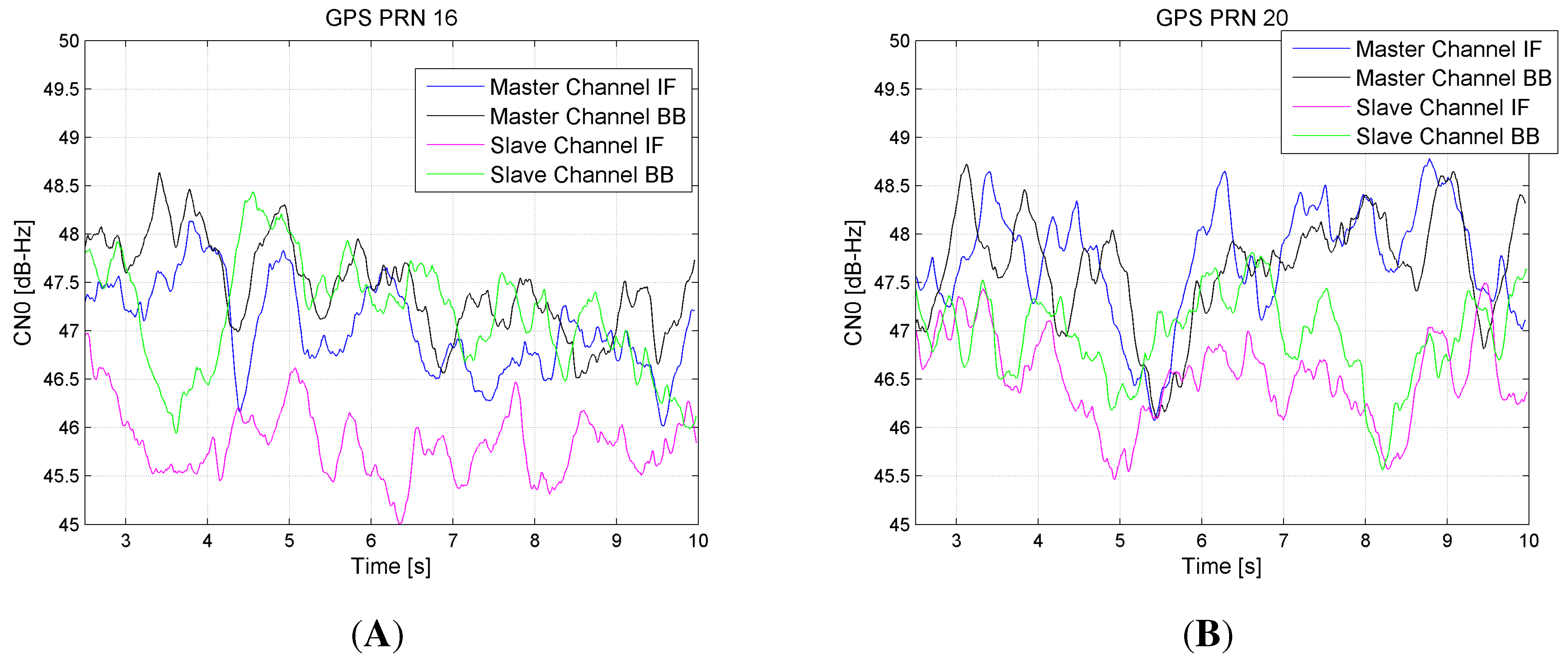
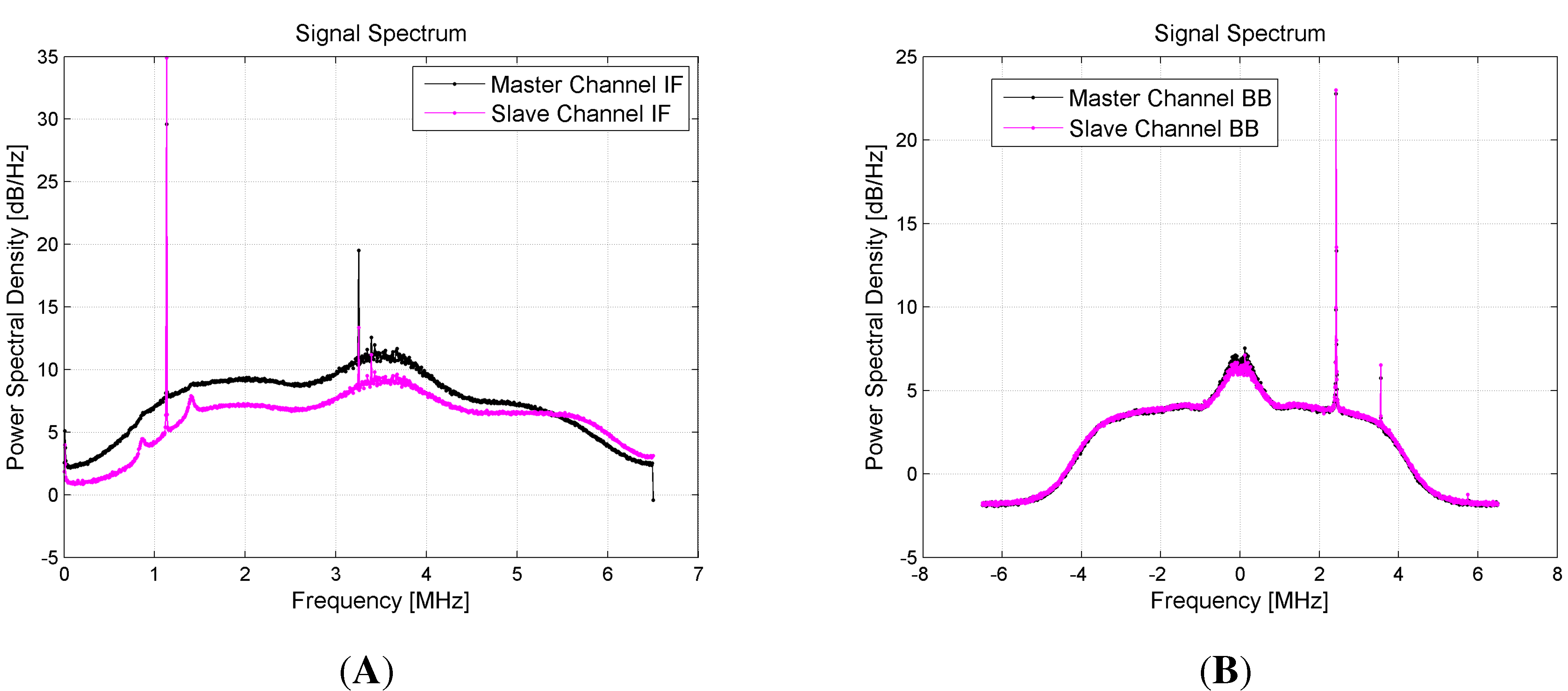
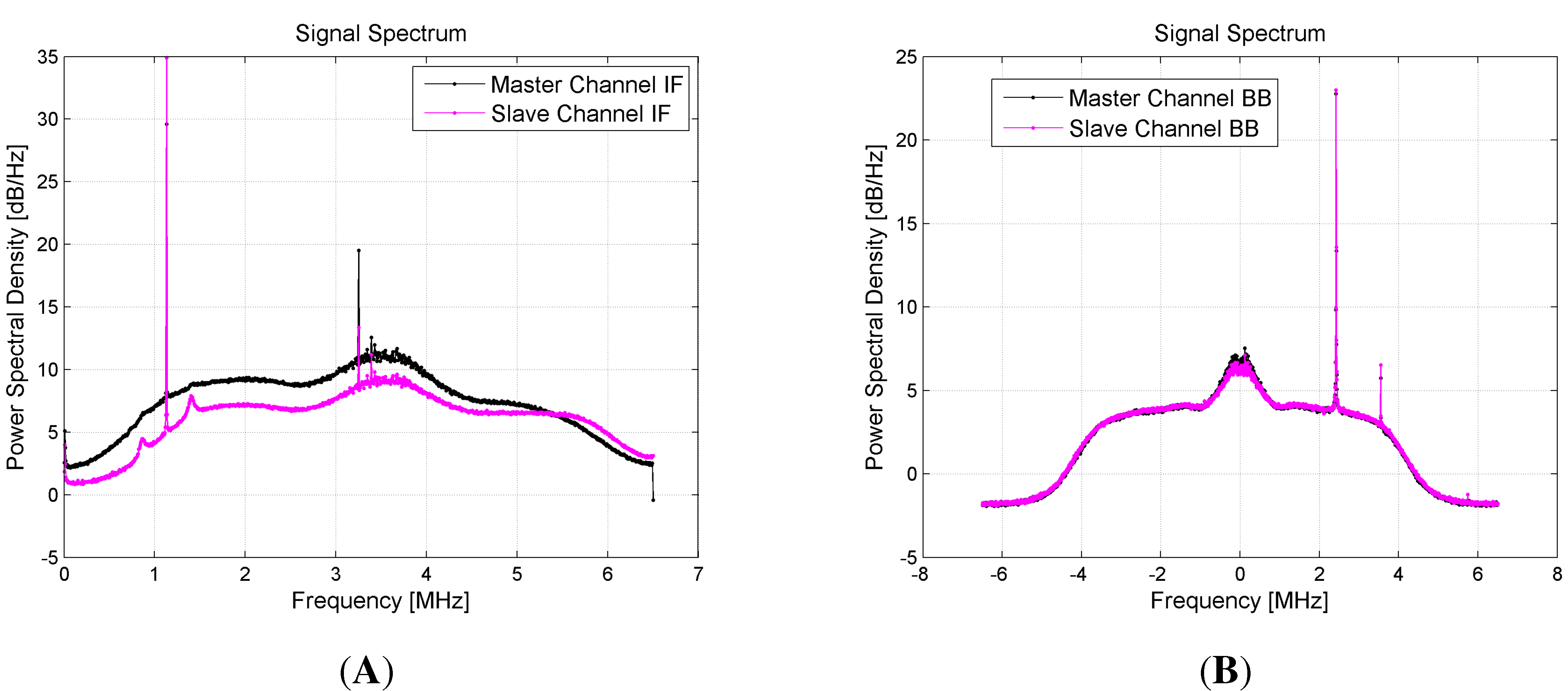
3.4. Functional Tests for the Validation of the Sensor


4. Soil Moisture Retrieval from Reflection Measurements: A Background on the Discipline
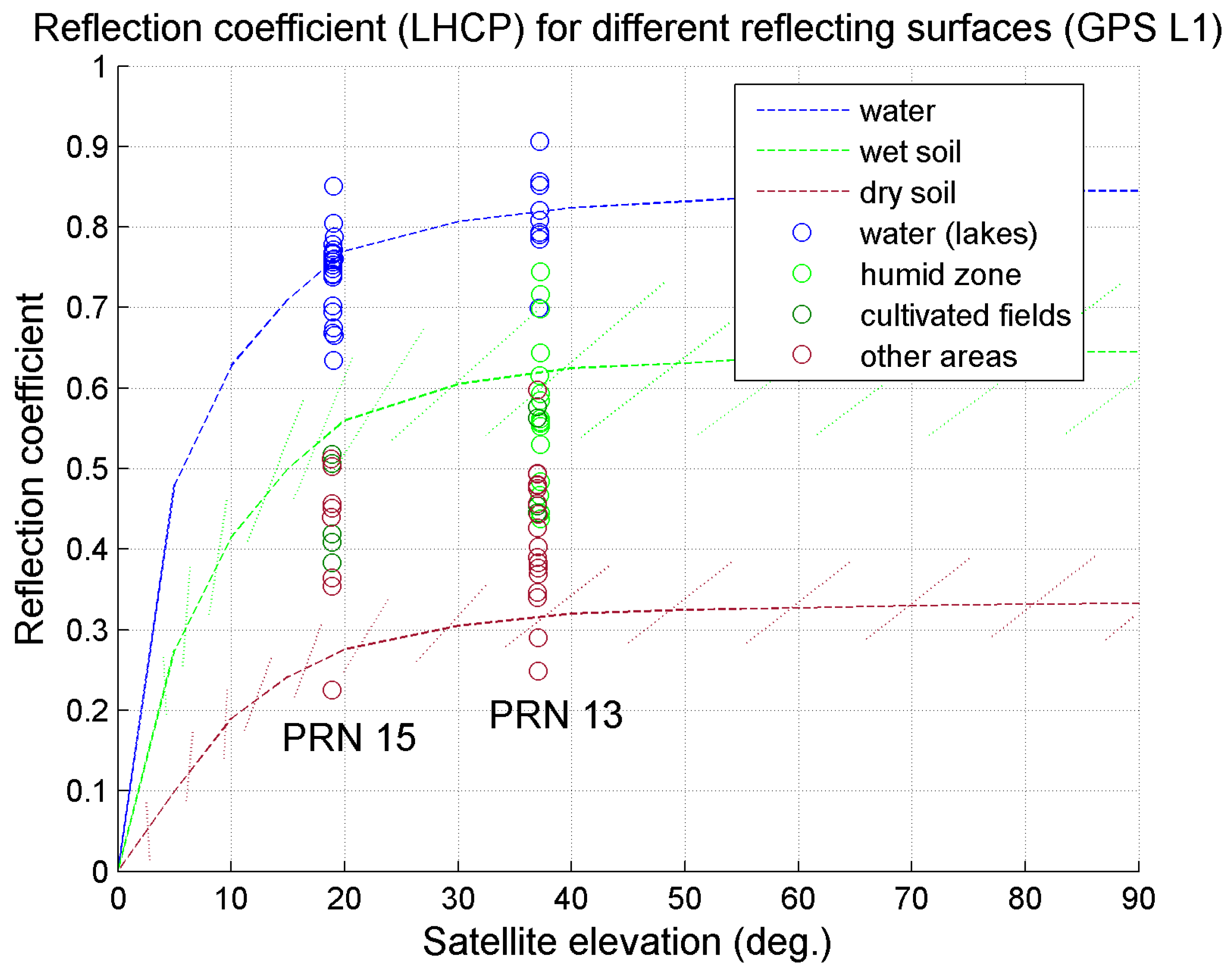
4.1. LHCP-Based Soil Moisture Retrieval
4.2. LHCP + RHCP-Based Soil Moisture Retrieval
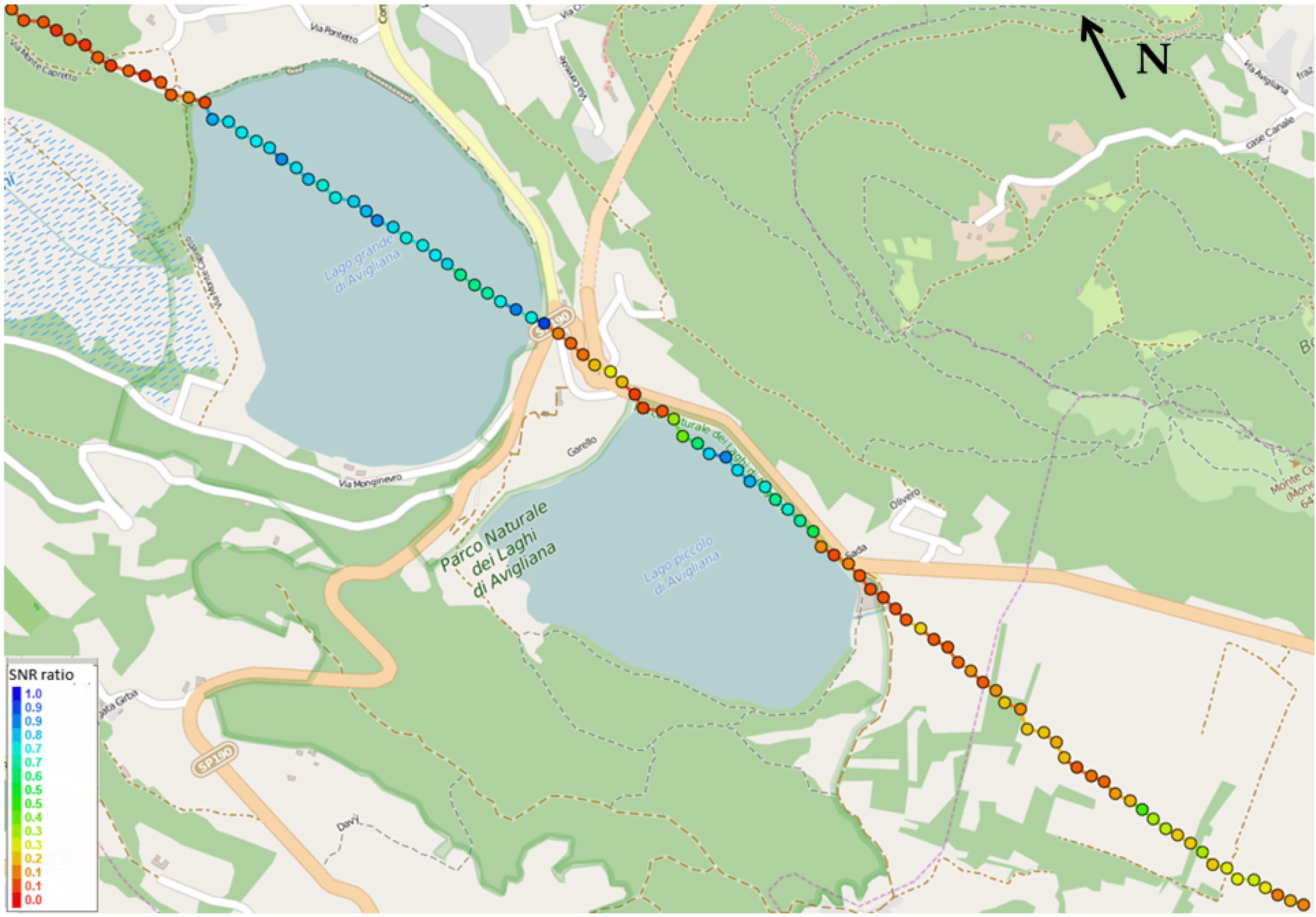
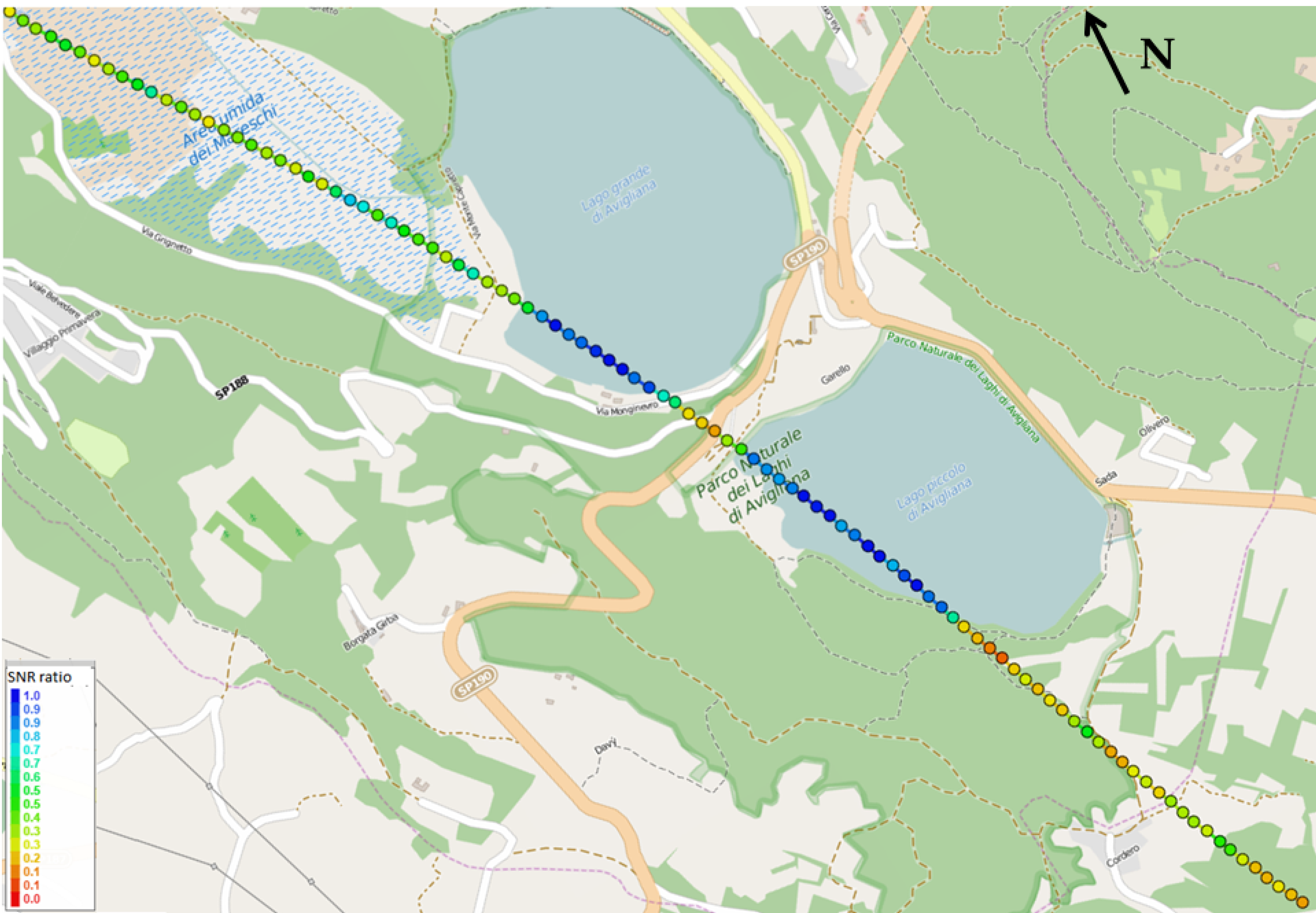
5. Signal Processing and Results of an In-Field Test
5.1. Signal Processing Principles
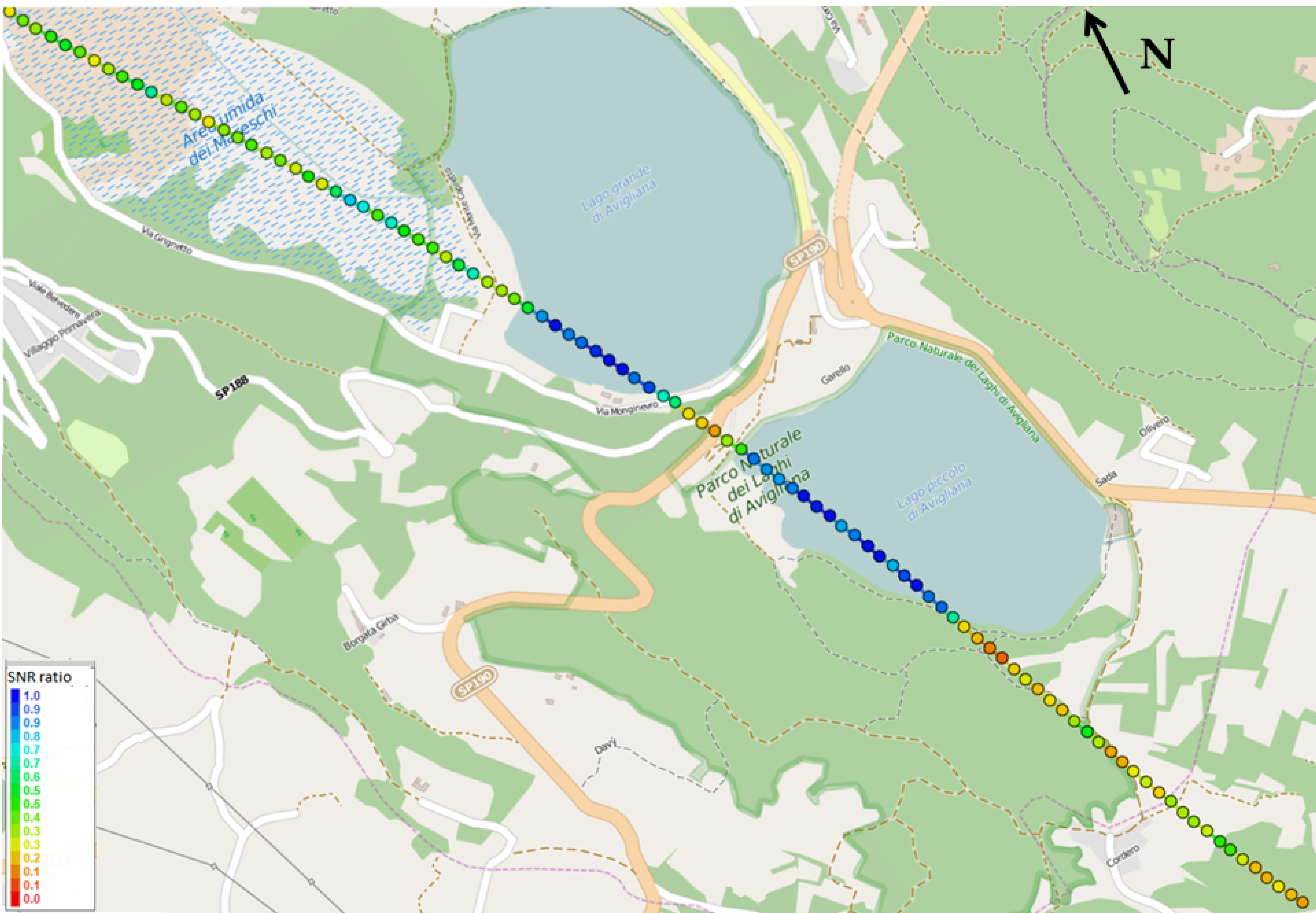
5.2. Test Campaign Results


6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Garrison, J.; Katzberg, S.; Hill, M. Effect of sea roughness on bistatically scattered range coded signals from the Global Positioning System. Geophys. Res. Lett. 1998, 13, 2257–2260. [Google Scholar] [CrossRef]
- Dampf, J.; Pany, T.; Falk, N.; Riedl, B.; Winkel, J. Galileo altimetry using AltBOC and RTK techniques. Inside GNSS 2013, 8, 54–63. [Google Scholar]
- Rodriguez-Alvarez, N.; Aguasca, A.; Valencia, E.; Bosch-Lluis, X.; Camps, A.; Ramos-Perez, I.; Park, H.; Vall-llossera, M. Snow thickness monitoring using GNSS measurements. IEEE Geosci. Remote Sens. Lett. 2012, 6, 1109–1113. [Google Scholar] [CrossRef]
- Sánchez, N.; Alonso-Arroyo, A.; Martínez-Fernández, J.; Piles, M.; González-Zamora, A.; Camps, A.; Vall-Llosera, M. On the Synergy of Airborne GNSS-R and Landsat 8 for Soil Moisture Estimation. Remote Sens. 2015, 7, 9954–9974. [Google Scholar] [CrossRef]
- Camps, A.; Bosch-Lluis, X.; Ramos-Perez, I.; Marchán-Hernández, J.F.; Rodríguez, N.; Valencia, E.; Tarongi, J.M.; Aguasca, A.; Acevo, R. New Passive Instruments Developed for Ocean Monitoring at the Remote Sensing Lab-Universitat Politècnica de Catalunya. Sensors 2009, 9, 10171–10189. [Google Scholar] [CrossRef] [PubMed]
- Bosch-Lluis, X.; Camps, A.; Ramos-Perez, I.; Marchan-Hernandez, J.F.; Rodriguez-Alvarez, N.; Valencia, E. PAU/RAD: Design and Preliminary Calibration Results of a New L-Band Pseudo-Correlation Radiometer Concept. Sensors 2008, 8, 4392–4412. [Google Scholar] [CrossRef]
- Nogués-Correig, O.; Cardellach Galí, E.; Campderrós, J.S.; Rius, A. A GPS-Reflections Receiver That Computes Doppler/Delay Maps in Real Time. IEEE Trans. Geosci. Remote Sens 2007, 45, 156–174. [Google Scholar] [CrossRef]
- Martin-Neira, M.; Caparrini, M.; Font-Rossello, J.; Lannelongue, S.; Vallmitjana, C.S. The PARIS concept: An experimental demonstration of sea surface altimetry using GPS reflected signals. IEEE Trans. Geosci. Remote Sens. 2001, 39, 142–150. [Google Scholar] [CrossRef]
- Ribot, M.A.; Kucwaj, J.-C.; Botteron, C.; Reboul, S.; Stienne, G.; Leclère, J.; Choquel, J.-B.; Farine, P.-A.; Benjelloun, M. Normalized GNSS Interference Pattern Technique for Altimetry. Sensors 2014, 14, 10234–10257. [Google Scholar] [CrossRef] [PubMed]
- Vinande, E.; Akos, D.; Masters, D.; Axelrad, P.; Esterhuizen, S. GPS bistatic radar measurements of aircraft altitude and ground objects with a software receiver. In Proceedings of the 61th Annual Meeting of the Institute of Navigation, Cambridge, MA, USA, 27–29 June 2005; pp. 528–534.
- Esterhuizen, S.; Masters, D. Experimental characterization of land-reflected GPS signals. In Proceedings of the 18th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 1670–1678.
- Caparrini, M.; Egido, A.; Soulat, F.; Germain, O.; Farres, E.; Dunne, S.; Ruffini, G. Oceanpal®: Monitoring sea state with a GNSS-R coastal instrument. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Barcelona, Spain, 23–28 July 2007; pp. 5080–5083.
- Pierdicca, N.; Guerriero, L.; Caparrini, M.; Egido, A.; Paloscia, S.; Santi, E.; Floury, N. GNSS reflectometry as a tool to retrieve soil moisture and vegetation biomass: Experimental and theoretical activities. In Proceedings of the International Conference on Localization and GNSS (ICL-GNSS), Turin, Italy, 25–27 June 2013; pp. 1–5.
- Ceraldi, E.; Franceschetti, G.; Iodice, A.; Riccio, D. Estimating the soil dielectric constant via scattering measurements along the specular direction. IEEE Trans. Geosci. Remote Sens. 2005, 43, 295–305. [Google Scholar] [CrossRef]
- Esterhuizen, S. The Design, Construction, and Testing of a Modular GPS Bistatic Radar Software Receiver for Small Platforms. Master Thesis, University of Colorado, Boulder, CO, USA, 2006. [Google Scholar]
- Camps, A.; Marchan-Hernandez, J.F.; Ramos-Perez, I.; Bosch-Lluis, X.; Prehn, R. New Radiometer Concepts for Ocean Remote Sensing: Description of the Passive Advanced Unit (PAU) for Ocean Monitoring. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Denver, CO, USA, 21 July–4 August 2006; pp. 3988–3991.
- Marchan-Hernandez, J.F.; Camps, A.; Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Ramos-Perez, I.; Valencia, E. PAU/GNSS-R: Implementation, Performance and First Results of a Real-Time Delay-Doppler Map Reflectometer Using Global Navigation Satellite System Signals. Sensors 2008, 8, 3005–3019. [Google Scholar] [CrossRef]
- Egido, A. GNSS Reflectometry for Land Remote Sensing Applications. Ph.D. Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 7 May 2013. [Google Scholar]
- Egido, A.; Caparrini, M.; Ruffini, G.; Paloscia, S.; Santi, E.; Guerriero, L.; Pierdicca, N.; Floury, N. Global Navigation Satellite Systems Reflectometry as a Remote Sensing Tool for Agriculture. Remote Sens. 2012, 4, 2356–2372. [Google Scholar] [CrossRef]
- Paloscia, S.; Santi, E.; Fontanelli, G.; Pettinato, S.; Egido, A.; Caparrini, M.; Motte, E.; Guerriero, L.; Pierdicca, N.; Floury, N. Grass: An experiment on the capability of airborne GNSS-R sensors in sensing soil moisture and vegetation biomass. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013; pp. 2110–2113.
- Egido, A.; Paloscia, S.; Motte, E.; Guerriero, L.; Pierdicca, N.; Caparrini, M.; Santi, E.; Fontanelli, G.; Floury, N. Airborne GNSS-R Polarimetric Measurements for Soil Moisture and Above-Ground Biomass Estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1522–1532. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Voronovich, A.G. Bistatic GPS signal reflections at various polarizations from rough land surface with moisture content. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 24–28 July 2000; pp. 2852–2854.
- Zavorotny, V.U.; Larson, K.M.; Braun, J.J.; Small, E.E.; Gutmann, E.D.; Bilich, A.L. A Physical Model for GPS Multipath Caused by Land Reflections: Toward Bare Soil Moisture Retrievals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 100–110. [Google Scholar] [CrossRef]
- Dual Polarization ANTCOM Antennas Catalog. Available online: http://www.antcom.com/documents/catalogs/RHCP-LHCP-V-H-L1L2GPSAntennas.pdf (accessed on 5 November 2015).
- Nottingham Scientific Ltd (NSL) GNSS SDR Front End and Receiver. Available online: http://www.nsl.eu.com/primo.html (accessed on 27 April 2015).
- Hardkernel Co. Ltd ODROID-X2 Platform. Available online: http://www.hardkernel.com/main/products/prdt_info.php?g_code=G135235611947 (accessed on 5 November 2015).
- Troglia Gamba, M.; Lo Presti, L.; Notarpietro, R.; Pini, M.; Savi, P. A New SDR GNSS Receiver Prototype For Reflectometry Applications: Ideas and Design. In Proceedings of the 4th International Colloquium Scientific and Fundamental Aspects of the Galileo Programme, Prague, Czech, 4–6 December 2013; pp. 571–579.
- Navx-Ncs Professional. Available online: http://www.ifen.com/products/navx-gnss-test-solutions/ncs-gnss-rf-signal-generator/professional.html#c3 (accessed on 5 November 2015).
- Falletti, E.; Pini, M.; Lo Presti, L. Low complexity carrier to noise ratio estimators for GNSS digital receivers. IEEE Trans. Aerosp. Electron. Syst. 2011, 1, 420–437. [Google Scholar] [CrossRef]
- De Roo, R.D.; Ulaby, F.T. Bistatic specular scattering from rough dielectric surfaces. IEEE Trans. Antennas Propag. 1994, 2, 220–231. [Google Scholar] [CrossRef]
- Hallikainen, M.T.; Ulaby, F.T.; Dobson, M.C. Microwave dielectric behavior of wet soil -part 1: Empirical models and experimental observations. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 25–34. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Camps, A.; Vall-llossera, M.; Valencia, E.; Marchan-Hernandez, J.F.; Ramos-Perez, I. Soil Moisture Retrieval Using GNSS-R Techniques: Experimental Results over a Bare Soil Field. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3616–3624. [Google Scholar] [CrossRef]
- Sigrist, P.; Coppin, P.; Hermy, M. Impact of Forest Canopy on Quality and Accuracy of GPS Measurements. Int. J. Remote Sens. 1999, 20, 3595–3610. [Google Scholar] [CrossRef]
- Masters, D.; Axelrad, P.; Katzberg, S. Initial results of land-reflected GPS bistatic radar measurements in SMEX02. Remote Sens. Environ. 2004, 92, 507–520. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive; Addison-Wesley Reading: Boston, MA, USA, 1982. [Google Scholar]
- Clarizia, M.P. Investigating the Effect of Ocean Waves on GNSS-R Microwave Remote Sensing Measurements. Ph.D. Thesis, University of Southampton, Southampton, UK, 7 October 2012. [Google Scholar]
- Ticconi, F.; Pulvirenti, L.; Pierdicca, N. Models for scattering from rough surfaces. Electromagn. Waves 2011, 10, 203–226. [Google Scholar]
- Borre, K.; Akos, D.; Bertelsen, N.; Rinder, P.; Jensen, S.H. A Software—Defined GPS and Galileo Receiver: A Single-Frequency Approach; Birkhauser: Boston, MA, USA, 2007. [Google Scholar]
- Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Camps, A.; Ramos-Perez, I.; Valencia, E.; Park, H.; Vall-llossera, M. Vegetation Water Content Estimation Using GNSS Measurements. IEEE Geosci. Remote Sens. Lett. 2012, 9, 282–286. [Google Scholar] [CrossRef]
- Larson, K.M.; Braun, J.J.; Small, E.E.; Zavorotny, V.U. Environmental Sensing: A Revolution in GNSS Applications. Inside GNSS 2014, 9, 36–46. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Troglia Gamba, M.; Marucco, G.; Pini, M.; Ugazio, S.; Falletti, E.; Lo Presti, L. Prototyping a GNSS-Based Passive Radar for UAVs: An Instrument to Classify the Water Content Feature of Lands. Sensors 2015, 15, 28287-28313. https://doi.org/10.3390/s151128287
Troglia Gamba M, Marucco G, Pini M, Ugazio S, Falletti E, Lo Presti L. Prototyping a GNSS-Based Passive Radar for UAVs: An Instrument to Classify the Water Content Feature of Lands. Sensors. 2015; 15(11):28287-28313. https://doi.org/10.3390/s151128287
Chicago/Turabian StyleTroglia Gamba, Micaela, Gianluca Marucco, Marco Pini, Sabrina Ugazio, Emanuela Falletti, and Letizia Lo Presti. 2015. "Prototyping a GNSS-Based Passive Radar for UAVs: An Instrument to Classify the Water Content Feature of Lands" Sensors 15, no. 11: 28287-28313. https://doi.org/10.3390/s151128287
APA StyleTroglia Gamba, M., Marucco, G., Pini, M., Ugazio, S., Falletti, E., & Lo Presti, L. (2015). Prototyping a GNSS-Based Passive Radar for UAVs: An Instrument to Classify the Water Content Feature of Lands. Sensors, 15(11), 28287-28313. https://doi.org/10.3390/s151128287