
Observability Analysis of DVL/PS Aided INS for a Maneuvering AUV



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- A general analytical approach to analyze the observability of an underwater navigation system during maneuvering.
- Deriving conclusions regarding the limitations of the navigation system for an AUV in various dynamic conditions. Specifically, we focus on an INS/DVL and INS/PS navigation system of an AUV standing, rotating at a position and turning at a constant speed.
2. Problem Formulation of Aided INS
2.1. INS Error State Model
2.2. Measurement Models
2.2.1. DVL
2.2.2. PS
3. Analytical Observability Analysis for INS/DVL/PS System
3.1. DVL Assisted Navigation
3.1.1. Stationary Vehicle
3.1.2. Stationary Vehicle with Angular Velocity
3.1.3. Vehicle Traveling With Constant Speed and Angular Velocity
3.2. PS Assisted Navigation
3.2.1. Stationary Vehicle
3.2.2. Stationary Vehicle with Angular Velocity
3.2.3. Vehicle Traveling with Constant Speed and Angular Velocity
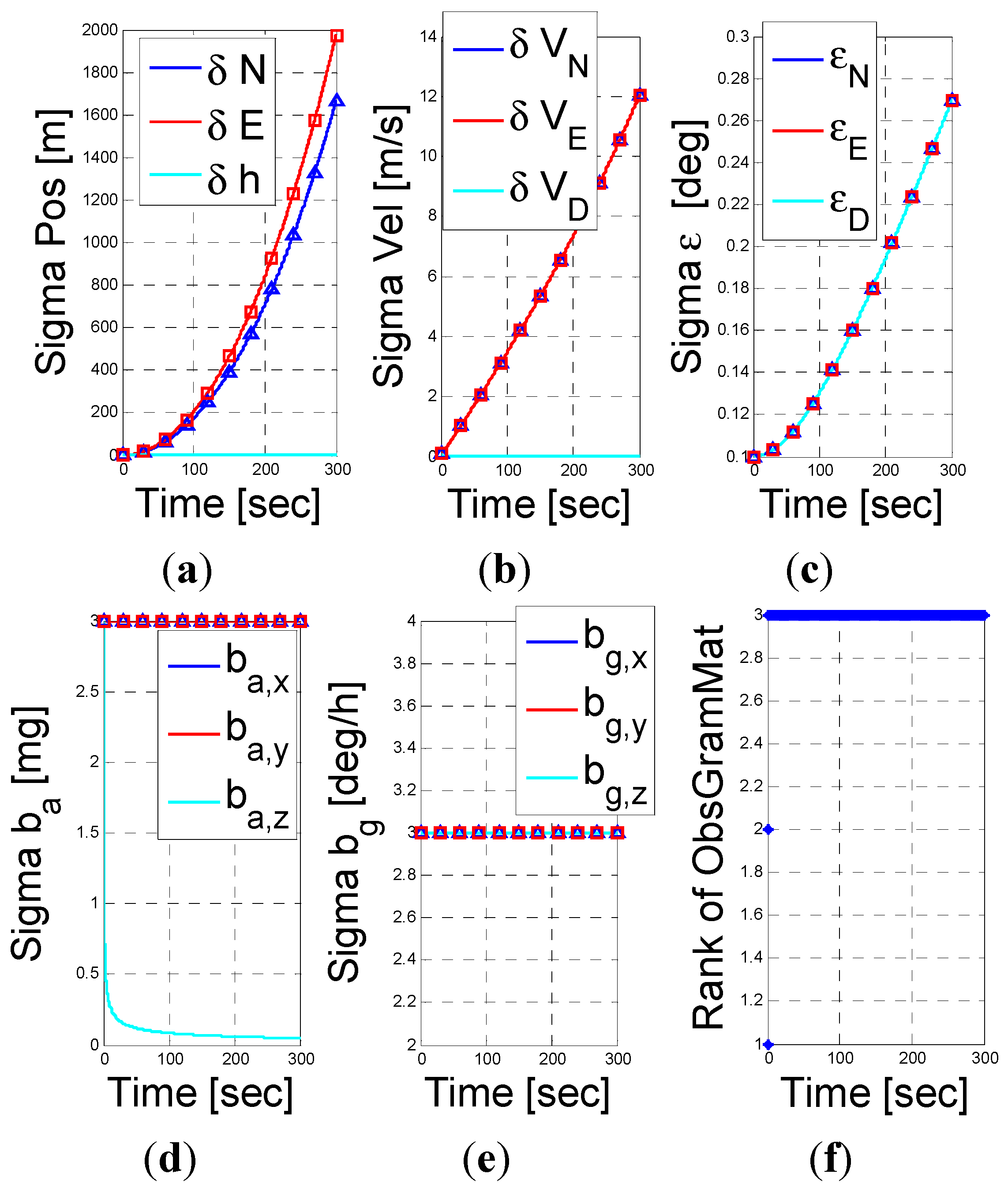
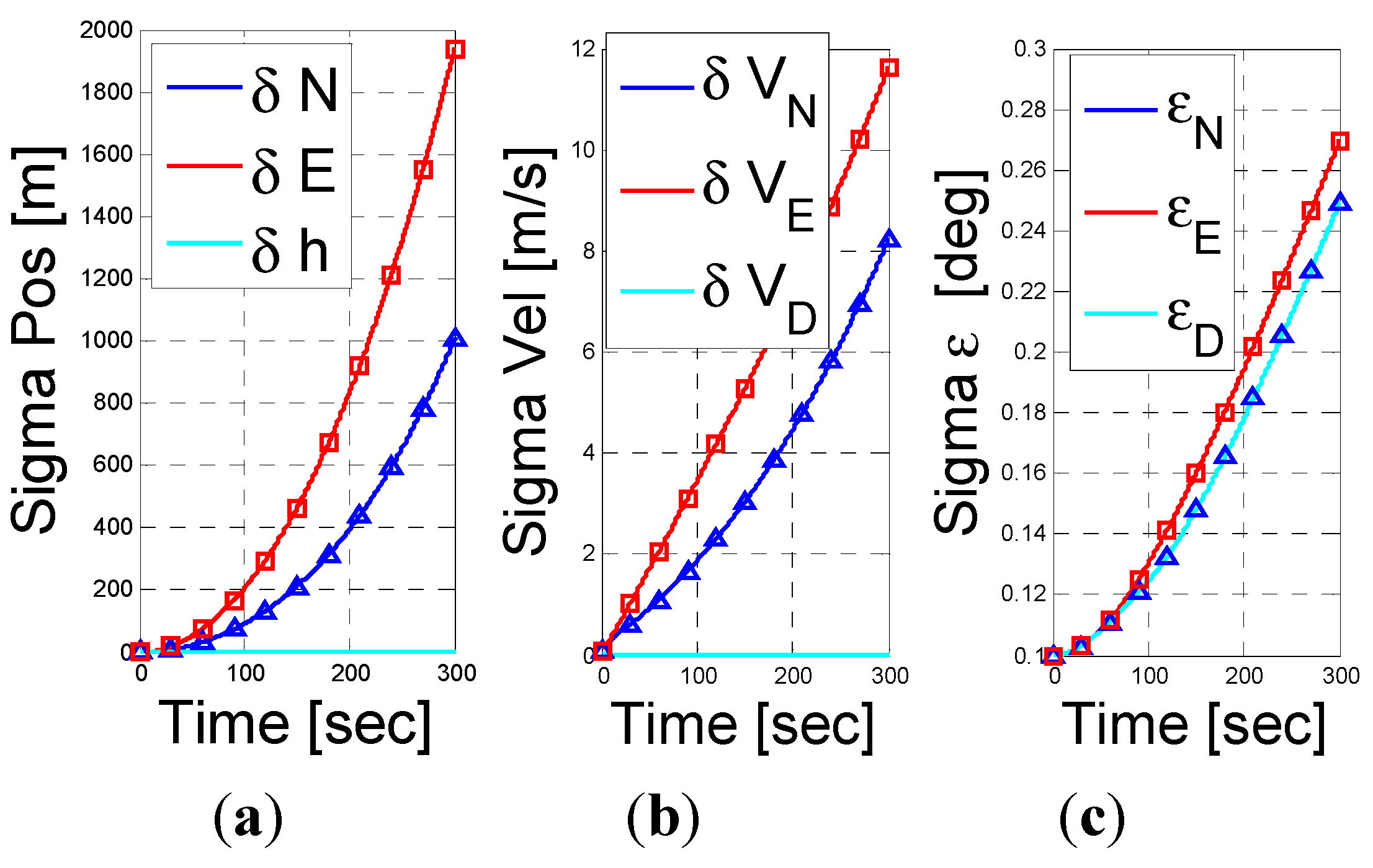
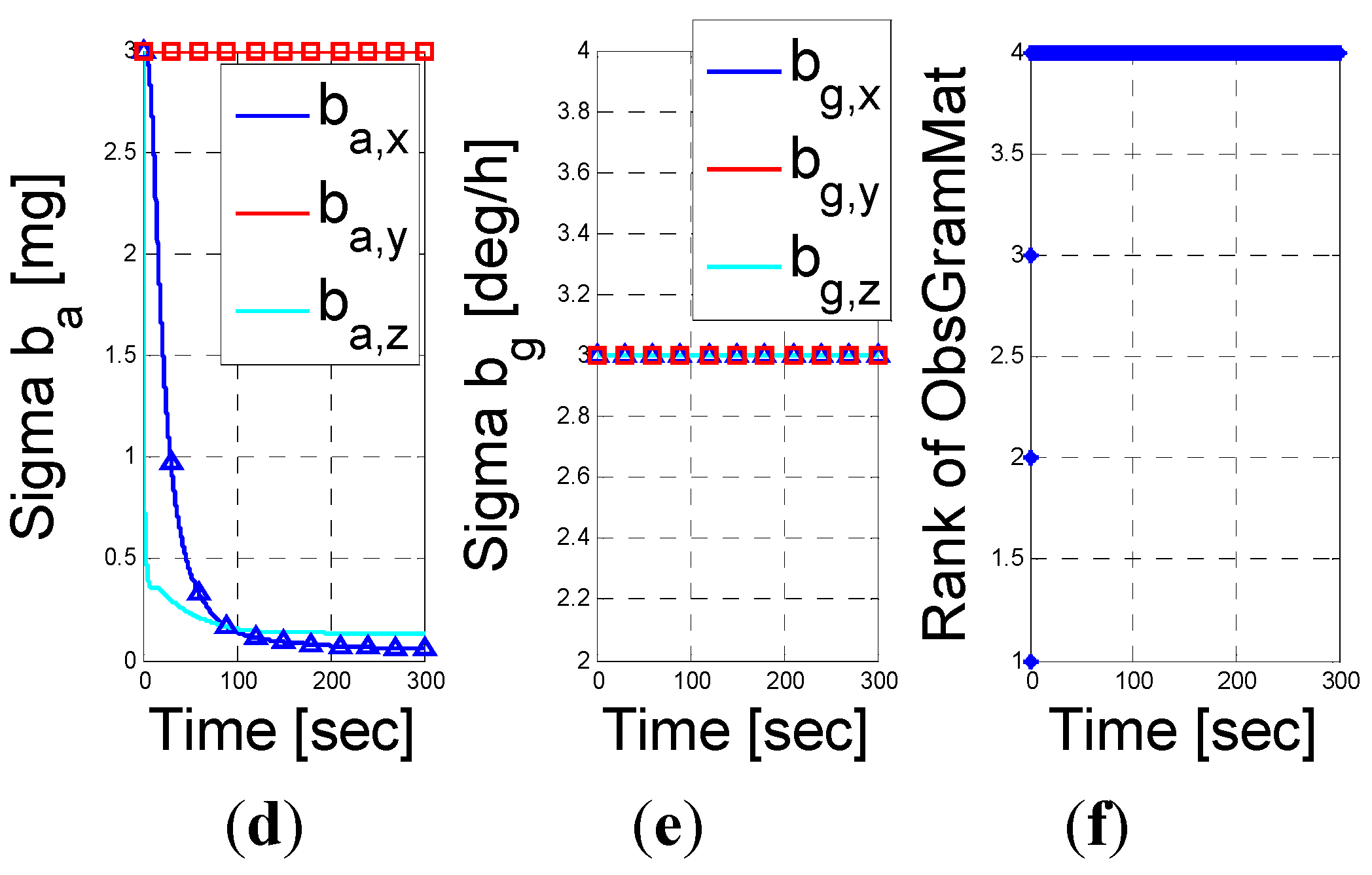
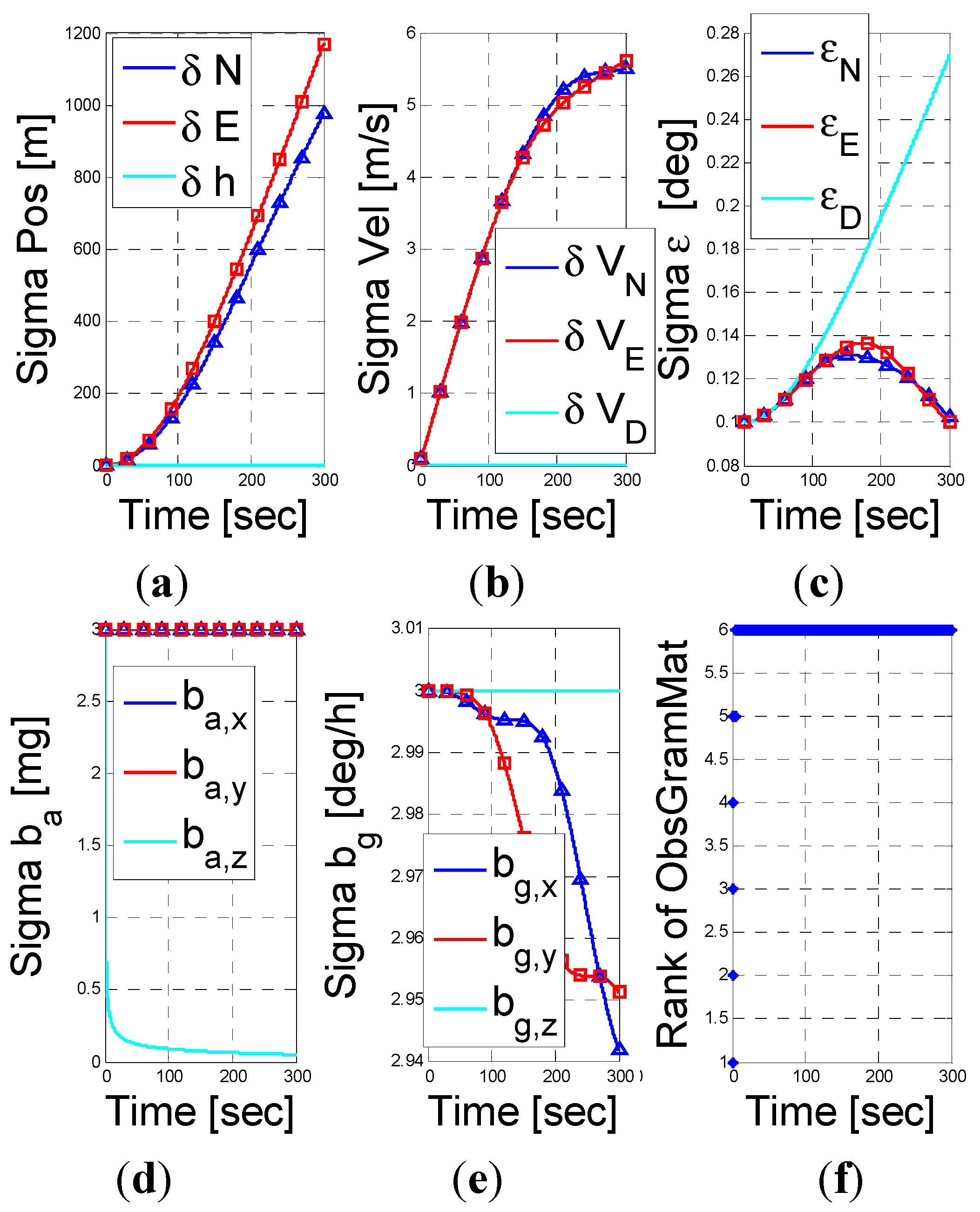
4. Numerical Analysis
4.1. Simulation Results
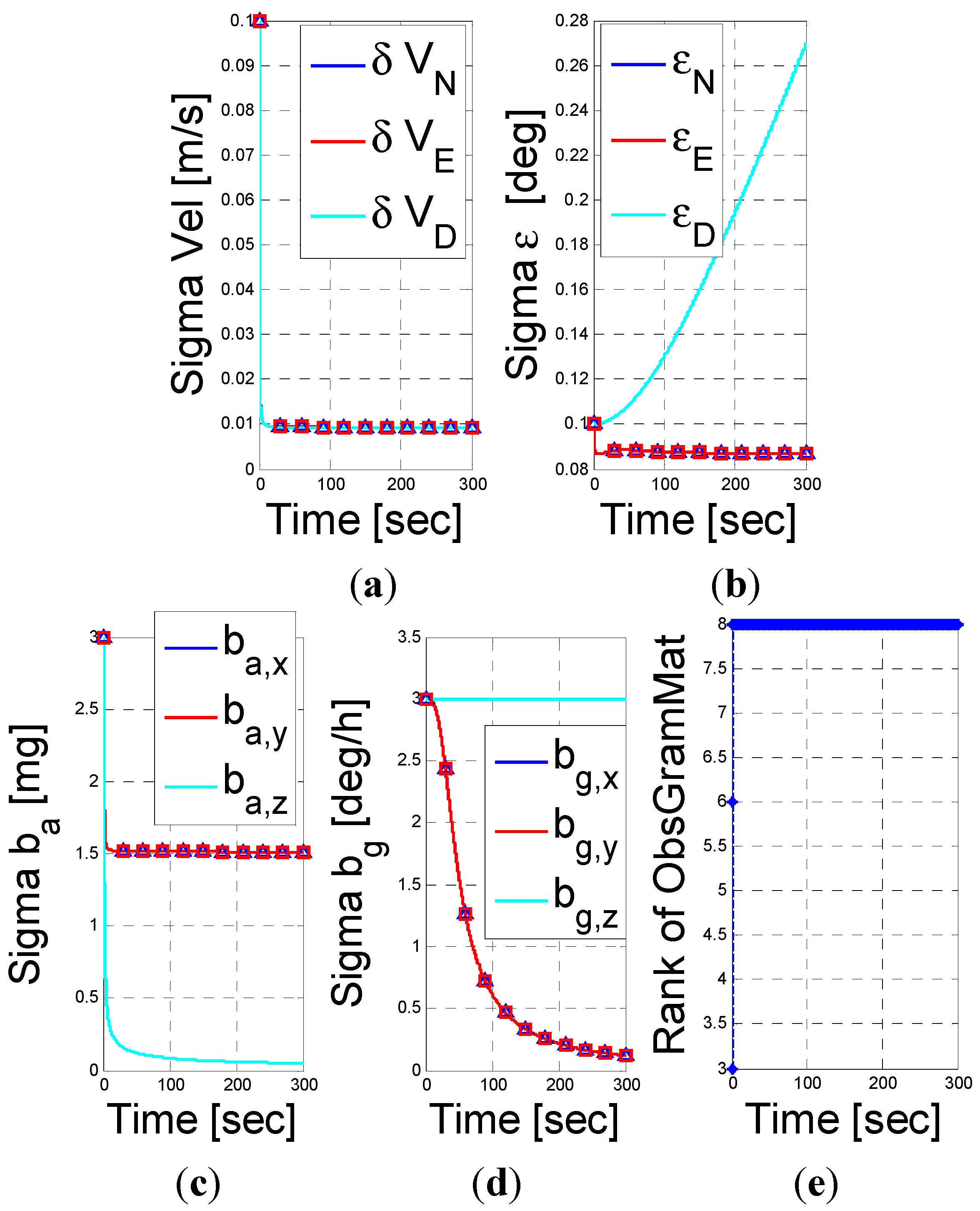
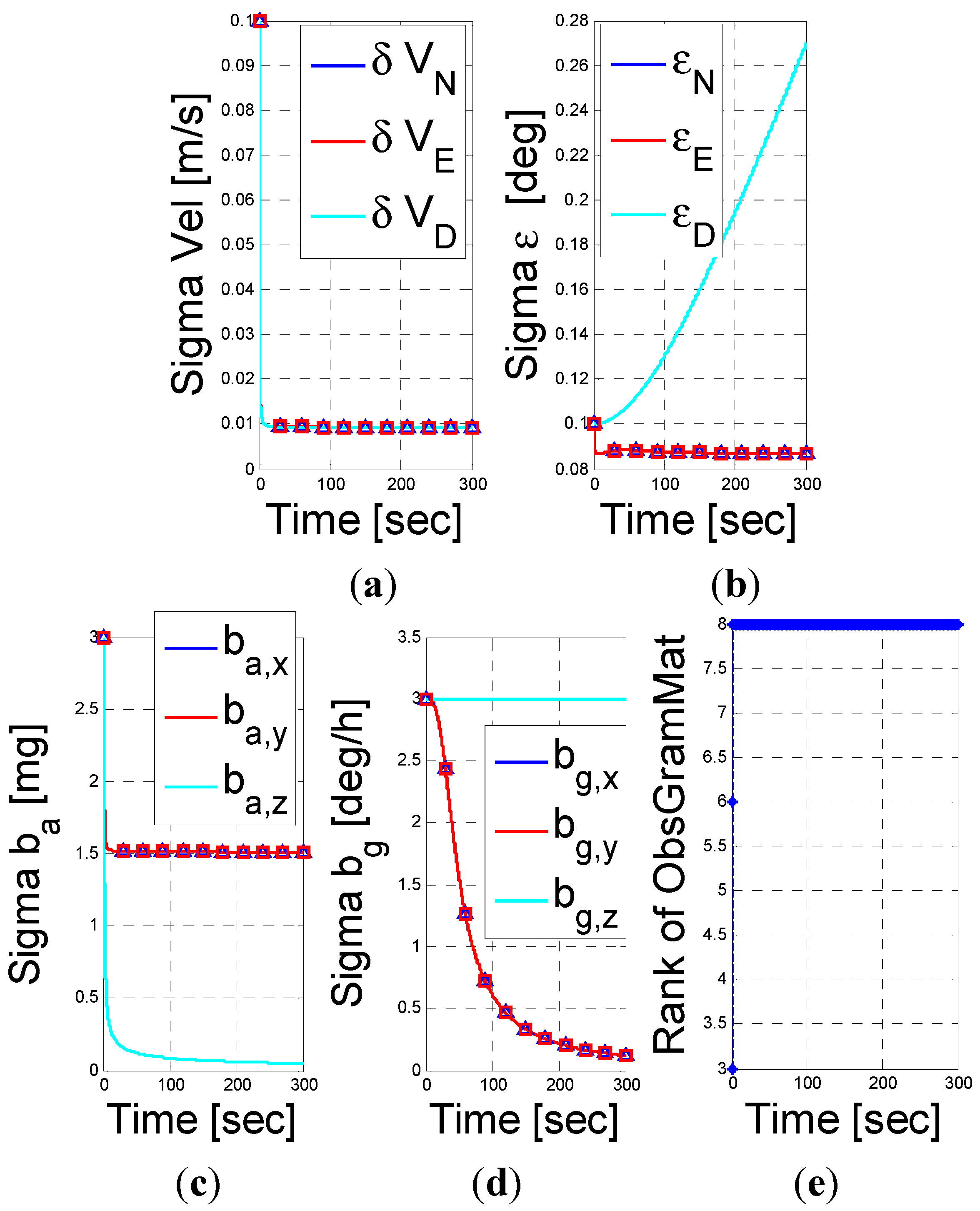
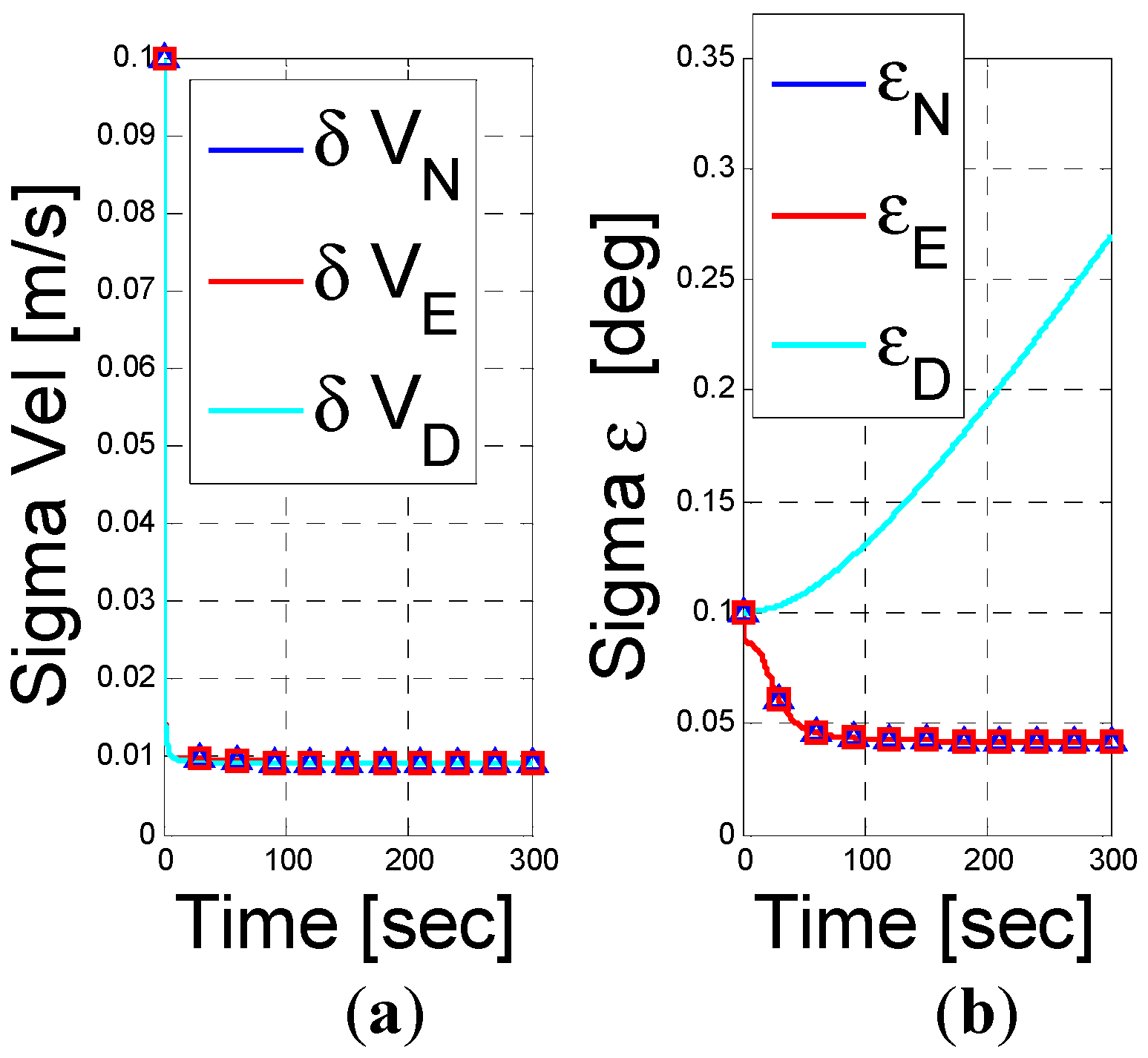
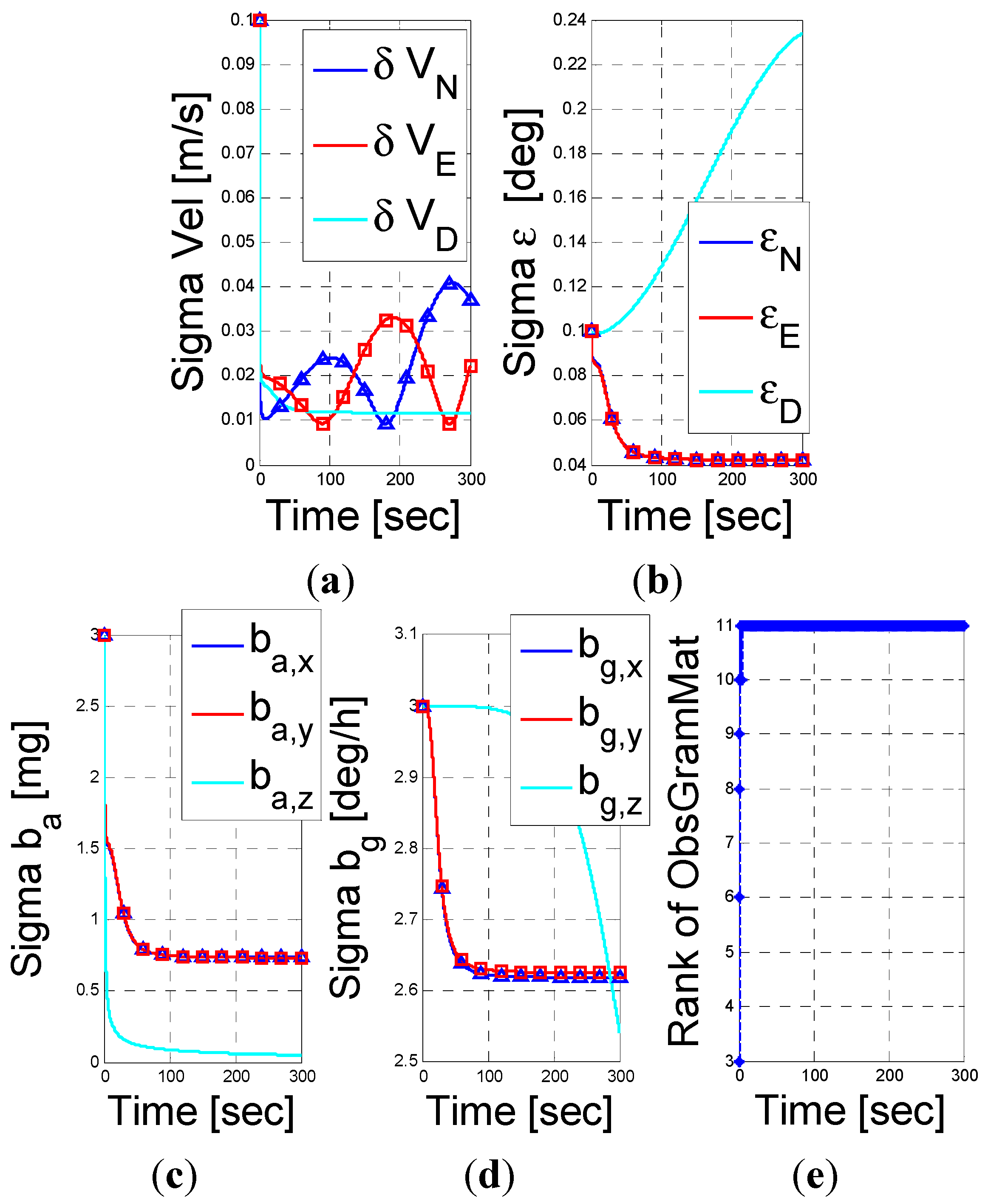
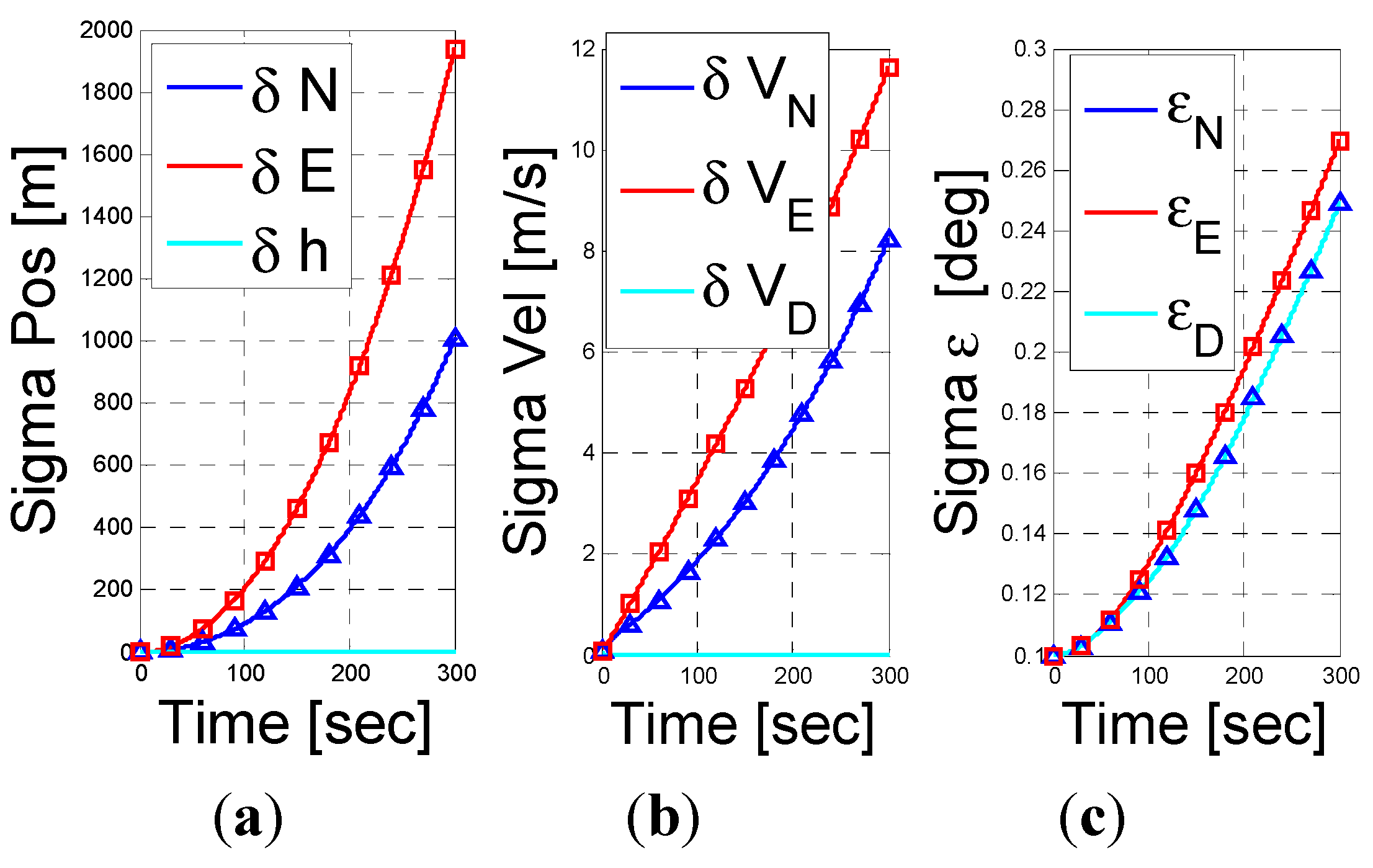
4.1.1. INS/DVL Fusion

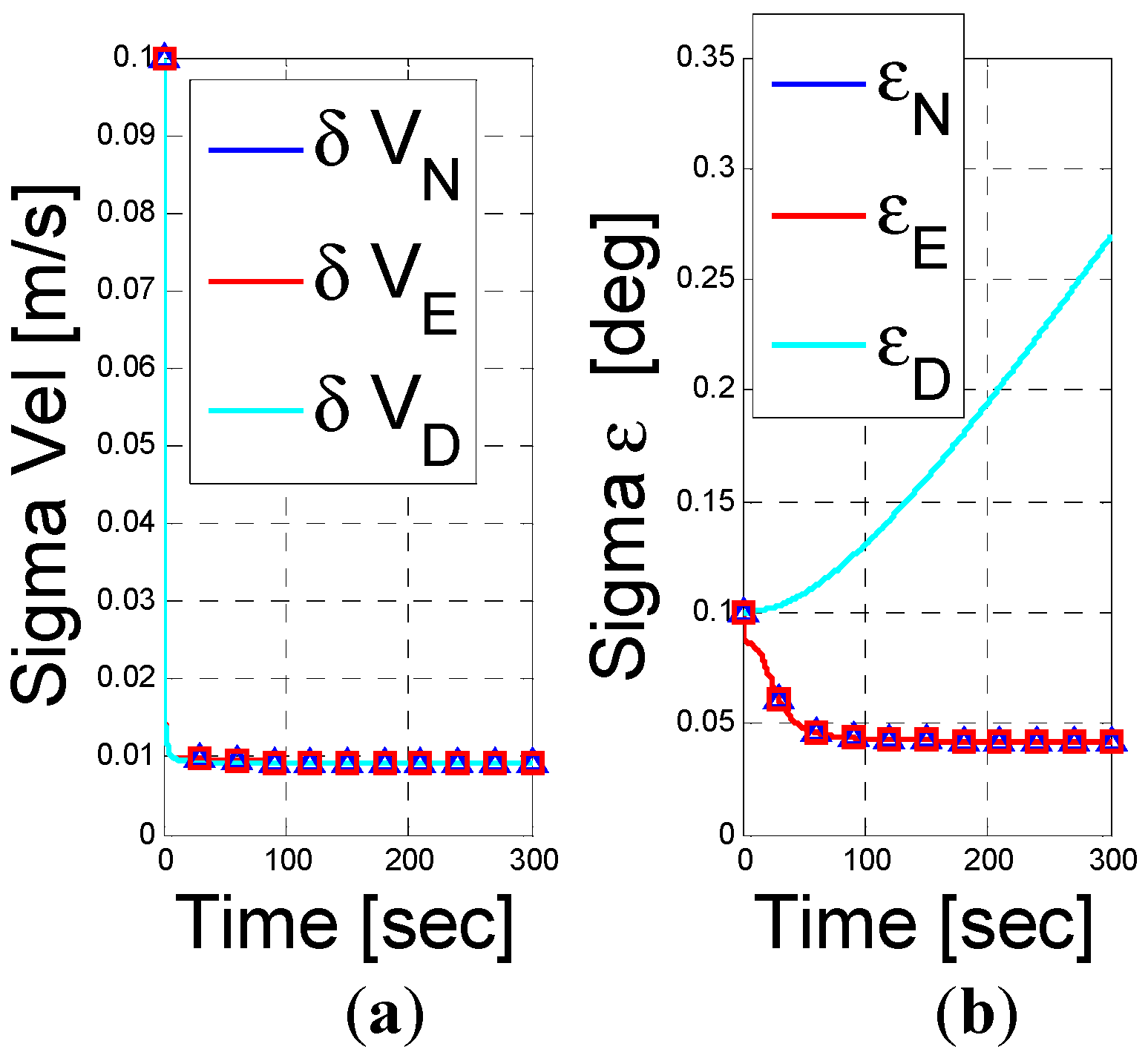
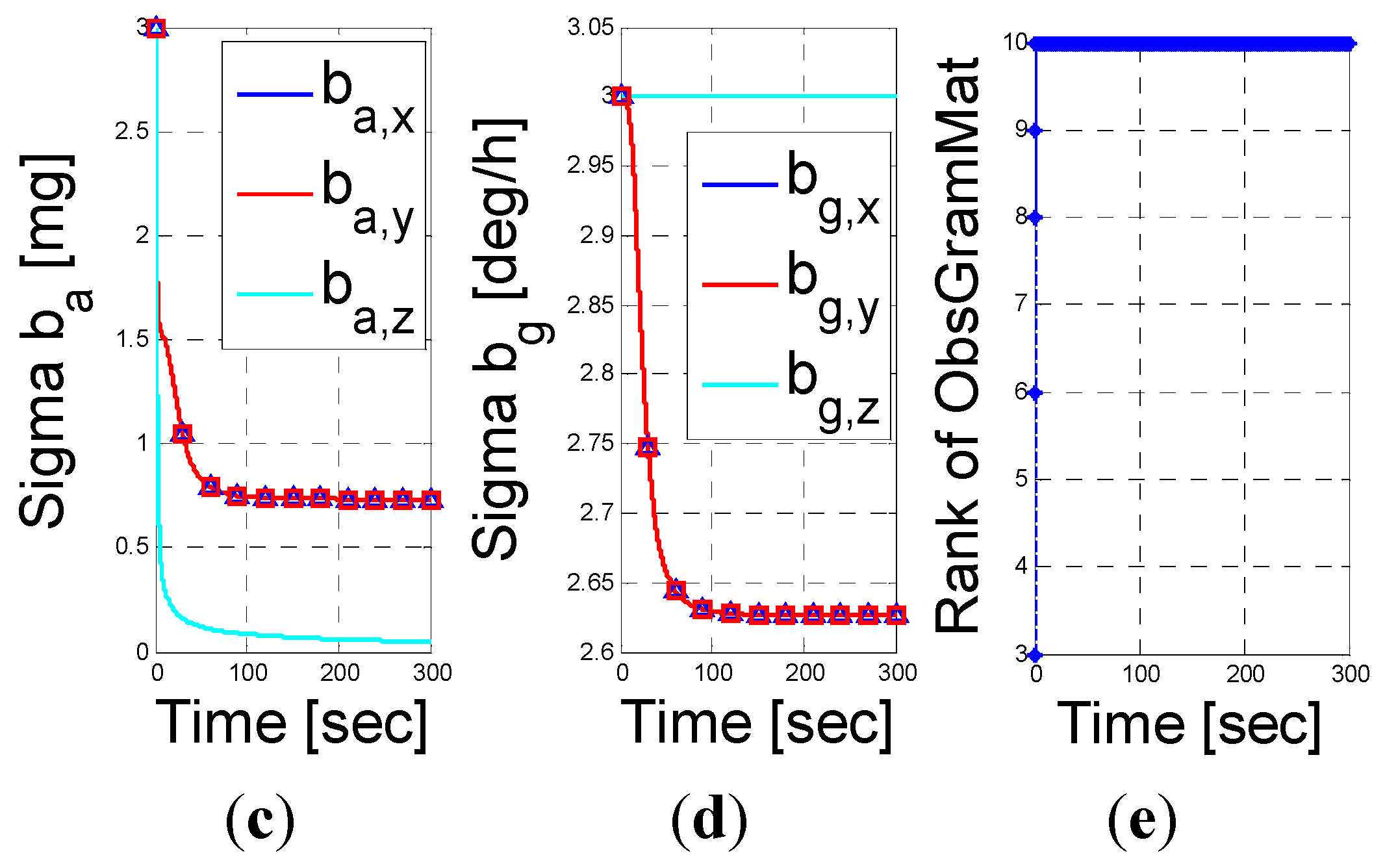
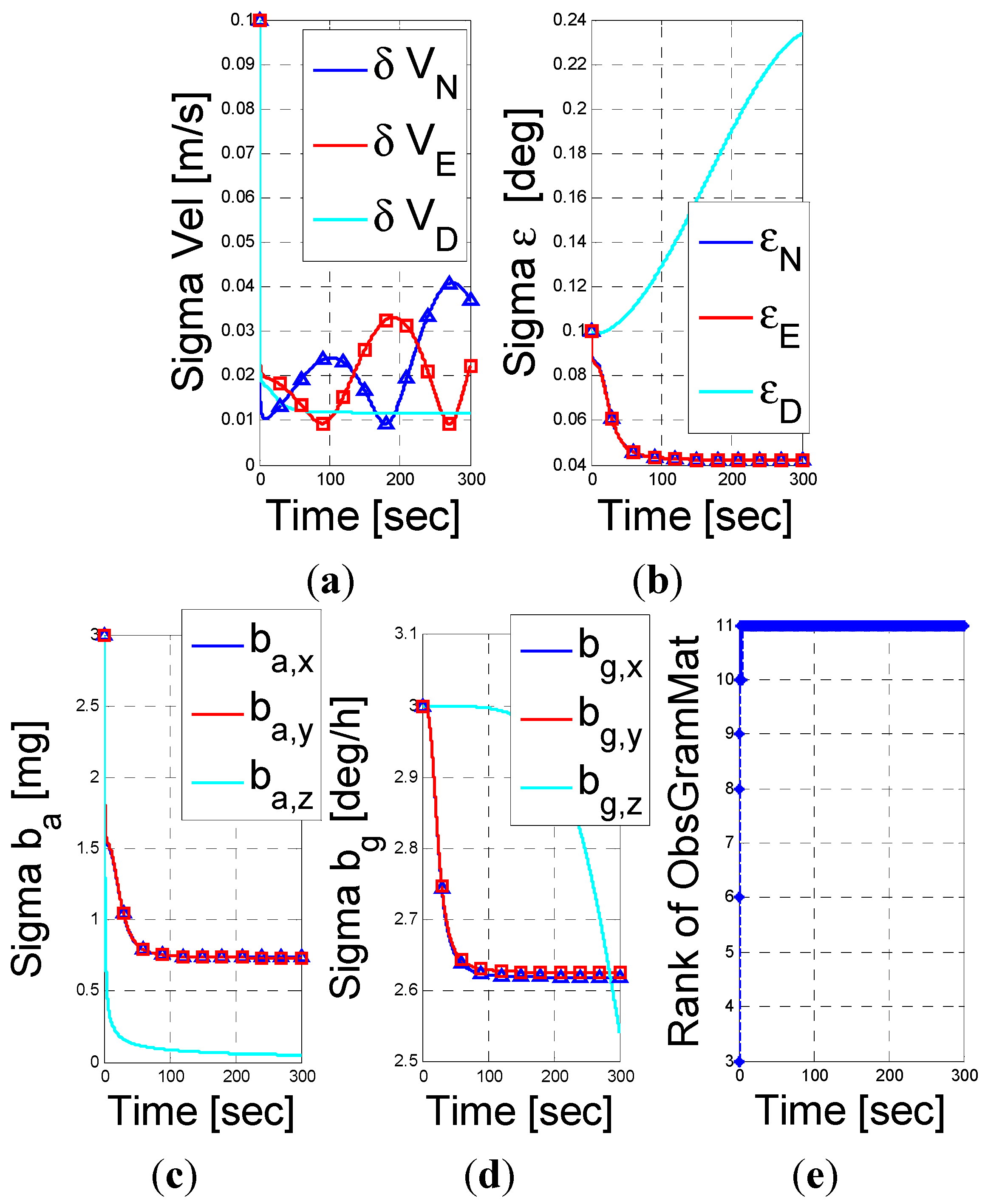
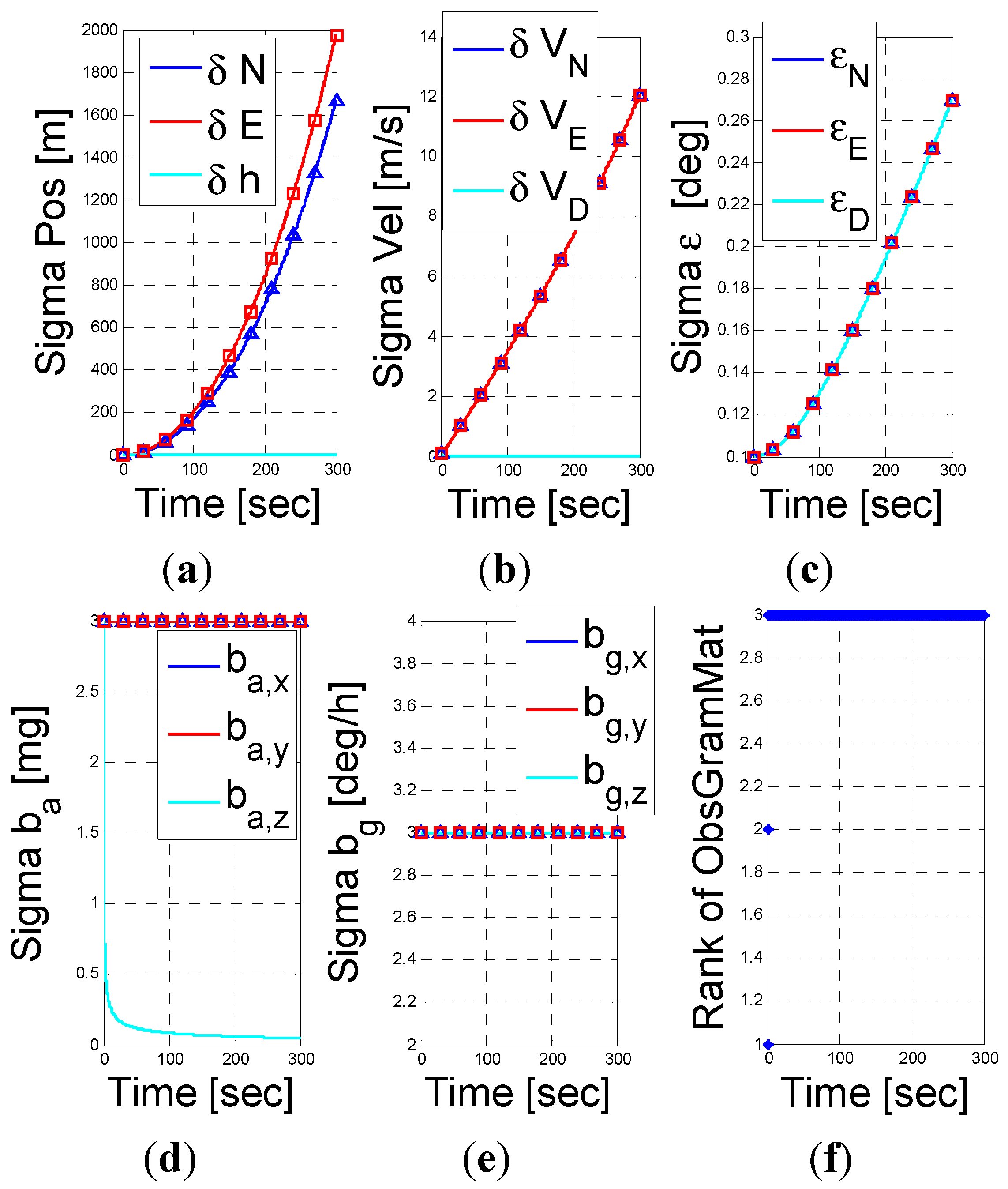
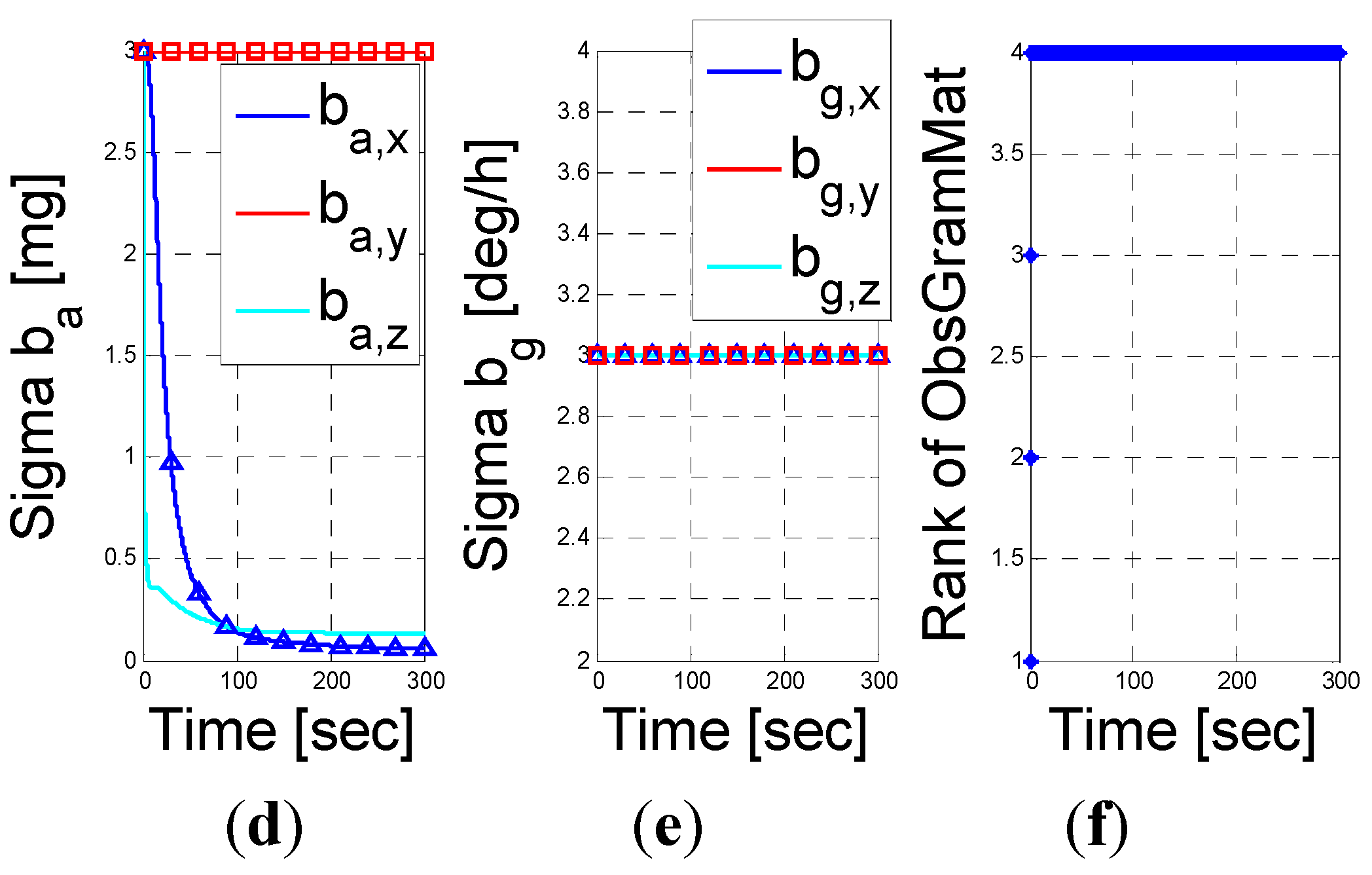
4.1.2. INS/PS Fusion
4.2. Discussion
5. Conclusions
Author Contributions
Conflicts of Interest
Nomenclature
| AUV | Autonomous Underwater Vehicles |
| DVL | Doppler Velocity Logger |
| GNSS | Global Navigation Satellite Systems |
| INS | Inertial Navigation Systems |
| PS | Pressure Sensor |
| UOS | Unobservable subspace |
| Φ(t) | State transition matrix |
| δba | Accelerometer bias residuals |
| δbg | Gyro bias residuals |
| δp | Position error vector |
| δv | Velocity error vector |
| δvDVL | DVL velocity measurement residual |
| δx | INS error state vector |
| ε | Misalignment errors |
| ψ | Heading angle |
| θ | Pitch angle |
| ω | Angular velocity vector |
| H(t) | Measurement matrix |
| M | Number of measurements |
| Tb→n | Transformation matrix from body to navigation frame |
| Td→b | Transformation matrix from DVL to body frame |
| a | Acceleration vector |
| f | Specific force vector |
| g | Gravity vector |
| h | Vehicle depth |
| u0 | set of solutions which span the unobservable subspace of the state vector |
| v | Velocity vector |
| (•)n | A vector expressed in the navigation frame |
| (•)b | A vector expressed in the body frame |
| (•)d | A vector expressed in the DVL frame |
| (•)i | A vector expressed in the inertial frame |
References
- Kinsey, J.; Eustice, R.; Whitcomb, L. A survey of underwater vehicle navigation: Recent advances and new challenges. In Proceedings of the 7th IFAC Conference on Maneuvering and Control of Marine Craft (MCMC2006), Lisbon, Portugal, 20–22 September 2006.
- Casari, P.; Zorzi, M. Protocol design issues in underwater acoustic networks. Comput. Commun. 2011, 34, 2013–2025. [Google Scholar] [CrossRef]
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology, 2nd ed.; The Institution of Engineering and Technology: Stevenage, UK, 2004. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial and Multisensor Integrated Navigation Systems; Artech House: Norwood, MA, USA, 2008. [Google Scholar]
- Farrell, J.A. Aided Navigation GPS with High Rate Sensors; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]
- Klein, I.; Filin, S.; Toledo, T. Pseudo-measurements as aiding to INS during GPS outages. NAVIGATION 2010, 57, 25–34. [Google Scholar]
- Vickery, K. Acoustic positioning systems. A practical overview of current systems. In Proceedings of the 1998 IEEE Workshop on the Autonomous Underwater Vehicles, Cambridge, MA, USA, 20–21 August 1998.
- Morgado, M.; Oliveira, P.; Silvestre, C. Tightly coupled ultrashort baseline and inertial navigation system for underwater vehicles: an experimental validation. J. Field Robot. 2013, 30, 142–170. [Google Scholar] [CrossRef]
- Barkby, S.; Williams, S.; Pizarro, O.; Jakuba, M. Incorporating prior maps with bathymetric distributed particle SLAM for improved AUV navigation and mapping. In Proceedings of the OCEANS 2009, MTS/IEEE Biloxi—Marine Technology for Our Future: Global and Local Challenges, Biloxi, MS, USA, 26–29 October 2009.
- Morice, C.; Veres, S.; McPhail, S. Terrain referencing for autonomous navigation of underwater vehicles. In Proceedings of the IEEE Oceans 2009-Europe, Bremen, Germany, 11–14 May 2009.
- Brokloff, N. Matrix algorithm for Doppler sonar navigation. In Proceedings of Oceans 94 OSATES: Oceans engineering for today’s technology and tomorrow’s preservation, Brest, France, 13–16 September 1994; pp. 378–383.
- Jalving, B.; Gade, K.; Svartveit, K.; Willumsen, A.; Sørhagen, R. DVL velocity aiding in the HUGIN 1000 integrated inertial navigation system. Model. Identif. Control 2004, 25, 223–235. [Google Scholar] [CrossRef]
- Troni, G.; Whitecomb, L.L. Experimental evaluation of a MEMS inertial measurements unit for Doppler navigation of underwater vehicles. In Proceedings of the Oceans 2012, Hampton Roads, VA, USA, 14–19 October 2012.
- Miller, P.A.; Farrell, J.A.; Zhao, Y.; Djapic, V. Autonomous underwater vehicle navigation. IEEE J. Ocean. Eng. 2010, 35, 663–678. [Google Scholar] [CrossRef]
- Lee, P.; Jun, B. Pseudo long base line navigation algorithm for underwater vehicles with inertial sensors and two acoustic range measurement. IEEE J. Ocean Eng. 2007, 34, 416–425. [Google Scholar] [CrossRef]
- Rhee, I.; Abdel-Hafez, M.F.; Speyer, J.L. Observability of an Integrated GPS/INS during Maneuvers. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 526–535. [Google Scholar]
- Hegrenaes, O.; Berglund, E. Doppler water-track aided inertial navigation for autonomous underwater vehicle. In Proceedings of the IEEE Oceans Conference and Exhibition, Bremen, Germany, 11–14 May 2009.
- Geng, Y.; Martins, R.; Sousa, J. Accuracy Analysis of DVL/IMU/Magnetometer Integrated Navigation System using Different IMUs in AUV. In Proceedings of the 8th IEEE International Conference on Control and Automation, Xiamen, China, 9–11 June 2010.
- Maybeck, P.S. Stochastic Models, Estimation and Control; Academic Press: New York, NY, USA, 1982. [Google Scholar]
- Ham, F.; Brown, R. Observability, eigenvalues, and Kalman filtering. IEEE Trans. Aerosp. Electron. Syst. 1983, 19, 269–273. [Google Scholar] [CrossRef]
- Ramanandan, A.; Chen, A.; Farrell, J.A. Inertial Navigation Aiding by Stationary Updates. IEEE Trans. Intell. Transp. Syst. 2011, 13, 235–248. [Google Scholar] [CrossRef]
- Rottman, Y.; Klein, I.; Filin, S. Analytical Observability Analysis of INS with Vehicle Constraints. NAVIG. J. Inst. Navig. 2014, 61, 227–236. [Google Scholar] [CrossRef]
- Klein, I.; Bar-Shalom, Y.; Rusnak, I. Observability analysis for tracking of coordinated turn maneuvers. In Proceedings of the IEEE 28-th Convention of Electrical and Electronics Engineers, Eilat, Israel, 3–5 December 2014.
- Goshen-Meskin, D.; Bar-Itzhack, I.Y. Observability analysis of piecewise constant systems—Part I: Theory. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 1056–1067. [Google Scholar] [CrossRef]
- Goshen-Meskin, D.; Bar-Itzhack, I.Y. Observability analysis of piecewise constant systems—Part II: Application to inertial navigation in-flight alignment. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 1068–1075. [Google Scholar] [CrossRef]
- Hong, S.; Lee, M.H.; Chun, H.-H.; Kwon, S.-H.; Speyer, J.L. Observability of error states in GPS/INS integration. IEEE Trans. Veh. Technol. 2005, 54, 731–743. [Google Scholar] [CrossRef]
- Hong, S.; Lee, M.H.; Chun, H.-H.; Kwon, S.-H.; Speyer, J.L. Experimental study on the estimation of lever arm in GPS/INS. IEEE Trans. Veh. Technol. 2006, 55, 431–448. [Google Scholar] [CrossRef]
- Tang, Y.; Wu, Y.; Wu, M.; Wu, W.; Hu, X.; Shen, L. INS/GPS Integration: Global Observability Analysis. IEEE Trans. Veh. Technol. 2009, 58, 1129–1142. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Klein, I.; Diamant, R. Observability Analysis of DVL/PS Aided INS for a Maneuvering AUV. Sensors 2015, 15, 26818-26837. https://doi.org/10.3390/s151026818
Klein I, Diamant R. Observability Analysis of DVL/PS Aided INS for a Maneuvering AUV. Sensors. 2015; 15(10):26818-26837. https://doi.org/10.3390/s151026818
Chicago/Turabian StyleKlein, Itzik, and Roee Diamant. 2015. "Observability Analysis of DVL/PS Aided INS for a Maneuvering AUV" Sensors 15, no. 10: 26818-26837. https://doi.org/10.3390/s151026818
APA StyleKlein, I., & Diamant, R. (2015). Observability Analysis of DVL/PS Aided INS for a Maneuvering AUV. Sensors, 15(10), 26818-26837. https://doi.org/10.3390/s151026818