Abstract
Robust stability/stabilization for discrete-time time-varying Markovian jump linear systems subject to block-diagonal stochastic parameter perturbations is addressed in this paper. Using a scaling technique, we succeed in effectively addressing the multi-perturbations case. We obtain an estimation of the lower bound of the stability radius in terms of the unique bounded and positive semidefinite solutions of adequately defined parameterized backward Lyapunov difference equations. In the time-invariant case, we show that such a lower bound is actually the exact value of the stability radius. Using the obtained result, we effectively address the state-feedback robust stabilization problem.
1. Introduction
The class of Markovian jump linear systems (MJLSs), a type of hybrid stochastic systems, is one of the most powerful modeling paradigm for systems facing random abrupt changes. Problems such as moment stability, sample path stability, and optimal and robust control, along with important applications of such systems, can be found in several references in the current literature, for instance [1,2,3,4] and the references therein.
In this paper, we study the robust stability and robust stabilization problems under multi-perturbations for a class of discrete-time time-varying MJLSs affected by parametric uncertainties of multiplicative white noise type with unknown intensity. The problem of robustness with respect to stochastic parametric uncertainties is a central one in control theory. This is mainly motivated by considerations around engineering applications. One of the most powerful tools that has been developed to tackle robustness issues is the concept of the stability radii, which, as coined by [5], lies at the heart of robustness analysis problems and as such constitute an area of central interest. Hence, since the seminal work of D. Hinrichsen and A.J. Pritchard ([6,7]), this has been a very active research domain.
In the MJLS context, one can cite the seminal reference of [8]. For recent developments on the topic, we refer to [9,10]. For Itô-type stochastic systems, we cite [11,12]. Very recent references such as [13] illustrate that this domain remains active. In order to cope with the multi-perturbations case, we use a scaling technique (see [14,15]). This allows us to obtain an estimation of the lower bound of the stability radius. The main contributions of this article can be summarized as follows:
- We first provide a lower bound of the stability radius in terms of the unique bounded and positive semidefinite solutions of adequately defined parameterized backward Lyapunov difference equations (Theorem 2).
- In the time-invariant case, we proceed to show that such a lower bound is actually the exact value of the stability radius (Theorem 3).
- The problem of state-feedback robust stabilization is also addressed. A first solution is obtained in Theorem 4, which is stated in terms of the solution of an adequately defined parameterized nonlinear matrix inequality.
- Using the results in Theorem 4, we proceed to obtain a numerically tractable condition for the computation of a state-feedback robust stabilizing controller. The feedback gain is constructed on the basis of the stabilizing solution of an adequately defined discrete-time algebraic Riccati equation.
The rest of this article is organized as follows: Section 2 provides some preliminary definitions and introduces the problem formulation. The main results are established in Section 3 for the time-varying case and in Section 4 for the time-invariant case. The robust stabilization problem is addressed in Section 5. Finally, a numerical example is provided in Section 6 to illustrate the theoretical results.
Notation: stands for the transpose of the matrix A. In block matrices, ★ indicates symmetric terms: . The expression is equivalent to , while is equivalent to .
2. Problem Formulation and Preliminaries
2.1. Model Description
Consider the system with the state space representation described by
where is the system state vector, , is a sequence of independent random vectors, and the triple is a time non-homogeneous Markov chain defined on a given probability space with the finite states set and the sequence of transition probability matrices . In (1), are known given matrices, while are arbitrary measurable functions with the additional properties
and
with . In (3), does not depend upon but can depend upon the function .
Throughout this paper, stands for the Euclidean norm of a vector, i.e., .
Remark 1.
Under a condition of type (2), the linear growth condition of type (3) seems to be more relaxed than a condition of Lipschitz type, such as the one considered in [16] in the continuous time case. However, the measurability property of the functions is required in order to be sure that the solutions of the perturbed system (1) are stochastic processes adapted to the filtration generated by the stochastic processes and involved in (1).
We denote as the set of all measurable functions which satisfy conditions of the form (2)–(3). To ease the presentation, we shall denote as the elements of the set . This allows us to describe the set of admissible uncertainties as
The system (1) may be regarded as a perturbation of the nominal system
The term models the possible parametric excitations of white noise type of the coefficients of the nominal system (5), for which the magnitude is in general unknown.
Consider the space of admissible perturbations defined in (4) and let us assume that the zero solution of the nominal system (5) is exponentially stable in mean square (in a sense which will be defined bellow). The first problem we address in this paper is the characterization of a wide set of perturbations with the property that the perturbed system is exponentially stable in the mean square for all . For a precise description of the set , we shall use the notion of the stability radius. To this end, we shall introduce a norm on the space of admissible perturbations .
2.2. Basic Assumptions
In order to provide precise definitions of the concept of exponential stability in the mean square invoked in this paper, let us consider the following discrete-time linear stochastic system:
where is the system state vector, while and are defined as in the previous section.
Concerning the processes and , the following assumptions are made:
- (H1)
- is a sequence of independent random vectors with the following properties:being the identity matrix of size r. As usual, throughout this paper stands for the mathematical expectation and the superscript ⊤ denotes the transposition of a vector or a matrix.
- (H2)
- For each , the -algebra is independent of the -algebra , where and .
- (H3)
- (i)
- The transition probability matrices are nondegenerate stochastic matrices, meaning that their elements have the properties , and for all .
- (ii)
- .
Note that in the developments of this note, the Markov chain is not prefixed, but it is assumed that the initial probability distributions lie in the subsetIt is worth mentioning that it is possible to check inductively that, under assumption (H3),for all .- (H4)
- There exists an initial probability distribution such that, for the Markov chain (with initial probability distribution ), there exists such that
- (H5)
- are fixed matrix-valued bounded sequences.
2.3. Lyapunov-Type Operators
Let be the linear subspace of real symmetric matrices. Set .
is a real-ordered Hilbert space. The usual inner product on is
for all and in . On the space , we consider the order relation ⪰ induced by the convex cone . If , we shall write if there exists such that for all . We shall write iff .
Based on the sequences , , and introduced previously, we define the following linear operators:
where
The operators are called the Lyapunov-type operators associated with the nominal system (5). The adjoint operator of with respect to the inner product (8) is denoted and described by
Let be the linear evolution operator defined on by the sequence , as follows:
where is the identity operator on . Regarding systems of type (5), this refers to the following kinds of exponential stability in the mean square of the zero equilibrium.
Definition 1.
We say that the zero solution of the nominal system (5) is:
(i) Strong exponentially-stable in mean square (SESMS) if the forward discrete-time linear equation on : is exponentially stable;
(ii) Exponentially stable in mean square with conditioning (ESMS-C) if there exist , such that
for all and any initial probability distribution of the Markov chain;
(iii) Exponentially stable in mean square (ESMS) if there exist , such that
for all and any initial probability distribution of the Markov chain.
Remark 2.
In general, in the time-varying context, the three kinds of exponential stability of the nominal system (5) introduced in Definition 1 are not equivalent. Only the implications hold. If assumption (H3) is fulfilled, then , and if assumptions (H3) and (H4) are both satisfied, then the three kinds of exponential stability in the mean square introduced in the above definition are equivalent. More details may be found in Chapter 3 of [3].
Regarding the exponential stability in the mean square of the equilibrium of the perturbed system in (1), we recall the following definition.
Definition 2.
We say that the state of the perturbed system (1) is:
(i) Globally exponentially stable in mean square with conditioning (GESMS-C) if its solutions have an upper bound as that from (13) for all and any initial probability distribution of the Markov chain;
(ii) Globally mean square stable with conditioning (GMSS-C) if its solutions satisfy
for all and any initial probability distribution of the Markov chain, being a constant not depending upon , and .
Remark 3.
It is obvious that the system in (1) is GMSS-C if it is GESMS-C. If assumptions (H1)–(H3) and (H5) are fulfilled, then the two kinds of stability of the zero solution of the system (1) are equivalent (see, e.g., Theorem 3.2 from [17]).
3. Stability Radius
Before providing the definition of the stability radius, we first introduce a norm in the set of the uncertainties. If , we set:
Now, we may define the norm
for all .
Remark 4.
Among the admissible uncertainties from we mention the linear uncertainties. These are of the form with , where are arbitrary matrices. We denote as the set of admissible linear uncertainties. It can be checked that if , then (16) becomes
In this special case, (17) recovers the norm of the admissible uncertainties involved in [18].
Extrapolating the terminology used in [16] to the stochastic case, we shall say that the nominal system (5) is affected by structured uncertainties. The structure of these uncertainties is described by the pairs , where with
The nominal system (5) is defined by the sequences , where and where is a stochastic matrix which satisfies the assumption (i).
Now we are in position to introduce the definition of the stability radius.
Definition 3.
The stability radius of the nominal system (5), or equivalently, the stability radius of the pair with respect to the set of structured uncertainties having the structure described by the pairs , is the number such that the zero state equilibrium of the corresponding system (1) is not GESMS.
Remark 5.
When the Definition 3 is restricted to the set of admissible uncertainties , one obtains the definition of the stability radius of the nominal system (5) with respect to the linear structured uncertainties involved in [18]. It can be seen that
In [18], the following result was obtained:
Proposition 1.
Assume the following:
- (a)
- Assumptions (H1)–(H5) are fulfilled;
- (b)
- The zero solution of the nominal system (5) is SESMS.
Under these conditions, the zero solution of the perturbed system (1) is SESMS for every perturbation which satisfies the estimate
where is defined by (17) and is computed by
being the unique solution bounded on of the discrete-time backwards affine equation
with
In this work, we rely on the scaling technique of perturbations used in [16] to obtain an improved lower bound of the stability radius of the nominal system in (5) with respect to the set of admissible structured perturbations. To this end, we rewrite the perturbed system (1) in an equivalent form, as follows:
, where and
From (2), (3), and (23), it is apparent that if . Moreover, we may infer from (16) and (23) that . Via (17), this allows us to deduce that
for all . From (23) and (24), we may deduce that is an isometry for all , .
We consider the discrete-time backward Lyapunov equation (DTBLE) on :
where is the linear operator introduced via (11) and with
Applying Theorem 2.5 from [3] in the case of Equation (25), we obtain the following.
Proposition 2.
Assume that:
- (a)
- Assumptions (H2), (H3), and (H5) are fulfilled;
- (b)
- The zero solution of the nominal system in (5) is SESMS.
Under these conditions, for any vector of scaling parameters , the DTBLE (25) has a unique solution which is bounded on . This solution is positive semidefinite and has the representation for all . Here, is the adjoint operator of the linear evolution operator with respect to the inner product (8). Furthermore, the dependence of the solution with respect to the scaling parameters is described by
where for each , we have as the unique bounded solution of the DTBLE:
For each and each vector of scaling parameters , we denote
, being the unique solution of (25). From (27) and (29), we get
being the unique solution of DTLE (28).
We are now in position to prove the following theorem.
Theorem 1.
then .
Assume:
- (a)
- Assumptions (H2), (H3), and (H5) are fulfilled;
- (b)
- The zero solution of the nominal system in (5) is SESMS.
- Given , if there exists such that
Proof.
Let be arbitrary such that . We have to show that the system (1) corresponding to this perturbation is GESMS-C. Let , be a vector of scaling parameters satisfying (31). Based on Proposition 2, we deduce that under the considered assumptions, the DTBLE (25) has a unique solution , and additionally that this solution is positive semidefinite and bounded on . Applying Lemma 3.1 from [3] in the case of the equivalent version (22) of the system in (1), taking , , , we obtain
, being an arbitrary solution of system (22). Using (25), we obtain from (32) that
. On the other hand, we have
.
From (16) and (23), we get
Invoking (17), we deduce from (34) and (35) that
For the last inequality, we take into account the assumption that . From (33) and (36), we obtain
. Because and
, we may infer via (37) that
, , . Invoking again the properties of the unique bounded solution of the DTBLE (25) stated in Proposition 2, we deduce that there exists not depending upon such that . In addition, (31) yields . Thus, (39) leads to
, .
Applying Corollary 3.9 (i) from [3], we obtain via (41) that there exists not depending upon such that , , . Thus, we have shown that system (1) is GMSS-C for all with . Finally, by applying implication from Theorem 3.2 in [17], we conclude that the perturbed system (1) is GESMS-C for any arbitrary satisfying . Thus, the proof is complete. □
In addition to the DTBLE (25), we may consider a discrete-time backward Lyapunov inequality (DTBLI) of the following form:
. Regarding the properties of the solutions of a DTBLI (42), we recall the following lemma.
Lemma 1.
Under assumptions (H3)(ii) and (H5), the following hold:
The next result provides a lower bound for the stability radius in terms of a solution of the DTBLI (42).
Corollary 1.
Proof.
(a) Based on Lemma 1 (ii), we find that (31) holds if (43) is true, as the spectral norm on the space of symmetric matrices is monotone with respect to the convex cone of the positive semidefinite matrices. The conclusion follows by applying Theorem 1.
- (b)
- The fact that the nominal system in (5) is SESMS follows from Lemma 1 (i). The rest of the proof is similar to the one from (a).
□
The next result provides the best lower bound of the stability radius which may be obtained via the scaling technique.
Theorem 2.
Assume that the assumptions from Theorem 1 are fulfilled. Then:
being the unique bounded solution of the DTBLE (25) corresponding to the vector of scaling parameter α.
Proof.
By contrast, assuming that (45) is not true, this means that . Let be arbitrary but fixed. From (45b), we deduce that there exists from such that . This is equivalent to
Applying Theorem 1, we conclude via (46) that . However, this is in contradiction with the choice of from above. Hence, (46) holds. This completes the proof. □
Adapting the reasoning from [16] to the stochastic framework considered in this work, in the next section we show that in the time-invariant context, the inequality (45a) becomes an equality.
4. The Time-Invariant Case
In this section, we assume that system (1) satisfies the following assumption:
- (H6)
- (a)
- , , , , , , ;
- (b)
- The set of admissible uncertainties is the same as in the previous sections.
- Hence, the definition of the stability radius remains unchanged.
Remark 6.
(a) In the special case considered in this section, the nominal system (5) becomes
According to Theorem 3.10 from [3], in the special case of the period , the three kinds of exponential stability in the mean square introduced in Section 2 become equivalent in the case of the nominal system (47).
- (b)
- , .
- (c)
- Applying Theorem 2.5 (iii) from [3] in the case of the DTBLE (25), we deduce that if the zero solution of the nominal system (47) is ESMS, then for each vector of scaling parameters , the DTBLE (25) has a unique bounded solution and that solution is constant. This is the unique solution of the discrete-time algebraic Lyapunov equation DTALE:where is the linear operator defined in (48b) and where
- (d)
- (e)
- The time-invariant version of (29) is
Let be a given subset of indices. We denote as an arbitrary element from with the properties if and if are not in .
Let be the unique solution of the DTALE:
where is the Lyapunov-type operator defined in (48b) and , with its i-th block component defined by
where stands for the components of the vector . If the zero solution of the nominal system in (47) is ESMS, then for each , the DTALE (55) and (56) has a unique solution .
The following technical result is involved in the proof of the main result of this section.
Lemma 2.
Assume the following:
- (a)
- Assumptions (H1)–(H3) and (H6) are fulfilled;
- (b)
- The nominal system in (47) is ESMS.
We make the following convention of calculation: if .
Let , be the solution of the initial value problem (IVP):
and , .
If with
being the components of the scaling vector evaluated for , then we have
, .
Proof.
Applying Lemma 3.1 from [3] in the case of system (57) and the function , where is the unique solution for the DTALE (55), we obtain
Further, employing (49) and summing from to , we get
Because lies in , we deduce via Corollary 3.9 (i) from [3] that the series.
are convergent for all and .
Hence,
We are now in position to provide the main result of this section.
Theorem 3.
Assume the following:
- (a)
- Assumptions (H1)–(H3) and (H6) are fulfilled;
- (b)
- The zero solution of the nominal system in (47) is ESMS.
Under these conditions, the stability radius of the nominal system (47) with respect to the set of the structured uncertainties with the structure described by is provided by
Proof.
Let
With this notation, (61) becomes
From Theorem 2, we know that
From (64), it is clear that if , then , which confirms (61) in this case.
In the sequelae, we assume that . Employing (51), we rewrite (62) in the following form:
It can be seen that the value of is obtained by solving a mixed optimization problem similar to that studied in Section 2 of [16]. Hence, by applying Theorem 2.4 from [16], in the case of the optimization problem (65), we deduce that there exists and a vector of scaling parameters with the following property that
, where is the solution of the DTALE (55) corresponding to the parameter
For each we choose with the properties and
Let us consider , defined as follows:
From (16), (17), and (69) we get . We show that the perturbed system (1) associated with the uncertainty (69) is not GESMS-C. Assuming by contrast that system (1) is GESMS-C, this means that there exist , such that the solutions of the considered system satisfy
, , . This leads to
, where .
We rewrite the system in (1) corresponding to (69) in the following form:
where are defined as in (67) for and .
Based on (69), we infer that
, .
Here, are computed as in (58) for the scaling parameters defined in (67) and the solution of (71). From (70), we deduce that is in , . This allows us to deduce that lies in . Applying Lemma 2, we obtain
where we have denoted
Now, we have
where and .
Based on (67), (68), (72), and (74), we get
On the other hand, (58) and (67) yield
This equality together with (75) allows us to conclude that
Plugging (76) into (73), we deduce that
This is equivalent to , as , according to (H3)(iii). Thus, we have obtained via (66) that . This contradicts our supposition that . Hence, the system in (1) corresponding to the uncertainty in (69) is not GESMS-C. Thus, we have shown that (63) is true. This complete the proof. □
The next result is often used in designing a robust stabilizing control with a prescribed level of robustness.
Proposition 3.
Assume that assumptions (H1)–(H3) and (H6) are fulfilled. For a given scalar , the following are equivalent:
- (i)
- The nominal system (47) is ESMS and ;
- (ii)
- There exist positive definite matrices and scalars , , satisfying the following system of inequalities:, .
Proof.
because . On the other hand, if the nominal system in (47) is ESMS, then the eigenvalues of the linear operator introduced via (48b) are located in the interior of the disk . In this case, the unique solution of the DTALE (49) has the representation
For , let
where . From (80) and (79), we get
where is a constant. From (80), it is apparent that satisfies
The component-wise version of this equation is
Thus, for each , the matrices are positive definite and solve the system of LMIs in (77a). In addition, from (78) and (81), we can deduce that for small enough , the matrices solve the LMIs in (77b). Thus, we have shown that (ii) holds if (i) is true.
We start with the proof of the implication that (i)→ (ii). If (i) holds, then (59) is true. Let . From (61), we deduce that there exists in such that , where is the unique solution of the DTALE (49) corresponding to the vector of scaling parameters and is computed as in (53).
The previous inequality is equivalent to
- , which leads to . Hence,
To prove the converse implication, let us remark that if (77a) is solvable, then the nominal system in (47) is ESMS.
The condition follows from Corollary 1. This ends the proof. □
5. Robust Stabilization by State Feedback
Let us consider the following discrete-time controlled system:
, where are the state parameters and are the control parameters.
The stochastic processes and are the same as in the case of system (1) and satisfy assumptions (H1)–(H3). In (82), we have , , , , , as the known matrices of appropriate dimensions and as arbitrary functions from the set . The system in (82) can be regarded as a disturbance of the nominal system
For robust stabilization of the nominal system in (83) with respect to the structured uncertainties from having the structure described by , we can use controls of the following form:
where . The system obtained by coupling a control of type (84) to the system in (82) is as follows:
. The system in (85) can be regarded as a disturbance of the system
It can be seen that the system in (86) is the closed-loop system obtained by coupling a control of type (84) to the nominal system in (83). For this reason, in the sequelae, we refer to the system in (86) as the closed-loop nominal system.
Our aim is to find necessary and sufficient conditions which guarantee the existence of the control of type (84) which stabilizes the closed-loop nominal system in (86), and additionally its stability radius with respect to the structured uncertainties from :
for a prefixed level of robustness . A first answer to this problem is provided in the following theorem.
Theorem 4.
Assume the following:
- (a)
- Assumptions (H1)–(H3) and (H6) are fulfilled;
- (b)
- ,.
For a given level of robustness , the following are equivalent:
- (i)
- There exists a control in a state feedback form (84) which stabilizes the nominal system in (83) such that the stability radius of the closed-loop nominal system satisfies (87);
- (ii)
- There exist scalars , and positive definite matrices , satisfying the inequalities, whereMoreover, if (88) is solvable, then a control of type (84) which robustly stabilizes the nominal system in (83) while achieving a stability radius which satisfies (87) has a gain matrix provided by
Proof.
(i) ⇒ (ii). Let us assume that there exists a control of type (84) which stabilizes the nominal system in (83) such that the achieved stability radius satisfies (87). Applying the implication (i) ⇒ (ii) from Proposition 3 in the case of systems (85) and (86), we deduce that there exist scalars , and such that , , which satisfy the LMIs
. From assumption (b) and (89), we deduce that
because and . This allows us to rewrite (91a) in the following form:
where is defined in (90). Taking into account (92), we may infer that (88) is solvable if (93) and (91) are solvable. Thus, we have shown that (ii) holds if (i) is true.
In order to prove the converse implication, let us remark that (88a) together with (90) leads to (93), which is equivalent to (91a). The conclusion is obtained by invoking (ii) ⇒ (i) from Proposition 3 in the case of system (86). □
Remark 7.
It is apparent that (88a) cannot be converted in an obvious way into an LMI because of (92). This makes the numerical computation of the gain matrices in (90) difficult, since they are based on a solution of (88). This leads us to replace (88a) with the discrete-time algebraic Riccati equation (DTARE):
Definition 4.
A solution of the DTARE (94) is called a stabilizing solution if and if the zero solution of the closed-loop system
is ESMS.
Applying Theorem 5.13 from [3] in the DTARE case (94), we obtain the following.
Corollary 2.
Under assumptions (H3) and (H6), the following are equivalent:
- (i)
- The DTARE (94) has a stabilizing solution satisfying the sign conditions , ;
- (ii)
- The nominal system (83) is stochastic stabilizable and there exists satisfying the following LMIs:
Lemma 3.
(a) If is a solution of the LMI (91a) corresponding to a set of stabilizing gain matrices and to a vector of scaling parameters , then we have , , where is the unique stabilizing solution of the DTARE (94) corresponding to the same set of parameters , .
- (b)
- If is a solution of (88a) satisfying (92), then , .
Proof.
(Hint) The DTARE (94) satisfied by is rewritten in the form
being the same as in (95b). □
Theorem 5.
Assume the following:
- (a)
- Assumptions (H1)–(H3) and (H6) are fulfilled;
- (b)
- The nominal system in (83) is stochastic stabilizable;
- (c)
- There exists a set of parameters , for which the LMIs in (96) are solvable.
Let , be the gain matrices associated via (95b) with the stabilizing solution of the DTARE (94). Under these conditions, the control robustly stabilizes the nominal system in (83). The stability radius achieved by this control satisfies
Proof.
The DTARE (94) satisfied by can be written as follows:
Let be arbitrary such that , ; hence,
From (53), (89), (98), and (99) we deduce via Corollary 1(a) applied in the case of systems (85) and (86) that
Thus, (97) is satisfied, since (100) is satisfied for an arbitrary for which (99) holds. Thus, the proof is complete. □
Remark 8.
(a) From Theorem 4, it can be concluded that the largest stability radius achieved by a control of type (84) with gain matrices computed via (90) based on a solution of the matrix inequalities in (88a) corresponding to a vector of scaling parameters , is provided by
- (b)
- From Lemma 3,we may infer thatfor all which solves the matrix inequalities in (88a) and for being the stabilizing solution of the DTARE (94).
- (c)
- Based on (97), (101), and (102), we may conclude that for a given set of scaling parameters , , the stability radius achieved bywhere is computed as in (95b), has a lower bound which is greater or equal to the lower bound of the stability radius achieved by any other control of type (84) having gain matrices computed as in (90) based on a solution of (88a). At the same time, it is worth mentioning that reliable numerical methods exist for numerically computing the gain matrices of controls of type (103).
6. Numerical Example
In this section, we consider the problem of robust state feedback stabilization in the time-invariant case using the results in Theorem 5. We show how the scaling technique allows for improved estimation of the lower bound of the stability radius when compared to a non-scaling technique. Let and be the lower bounds corresponding to the non-scaling and scaling paradigms, respectively. We have randomly generated 40 numerical examples, then computed the parameter for each example (Figure 1). It can be seen that the scaling technique paradigm improves the estimation of the stability radius of the considered class of stochastic uncertain systems.
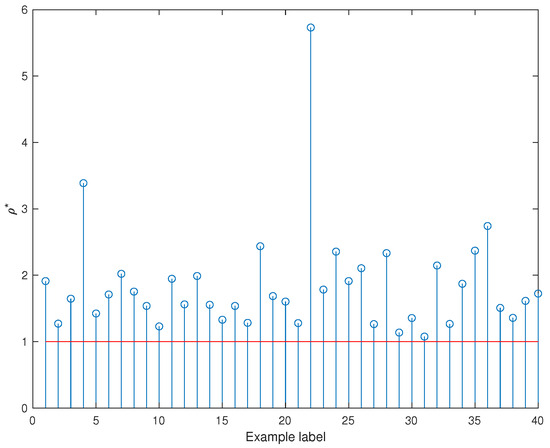
Figure 1.
Plot of the quantity .
7. Conclusions
In this paper, we have addressed the problem of robust stability analysis of a class of discrete-time time-varying Markovian jump linear systems subject to block-diagonal stochastic parameter perturbations. As a robustness measure, we have used the concept of stability radius, for which we obtain an estimation of its lower bound. We obtain a Riccati-based characterization allowing for efficient numerical computation of the stability radius. Our ongoing efforts are mainly devoted to extending the proposed framework to a more general class of systems, such as Markov regenerative switched linear systems, which generalize Markov and semi-Markov switching and allow for broader modeling flexibility
Author Contributions
Conceptualization, V.D.; methodology, V.D.; software, S.A.; validation, V.D. and S.A.; writing—original draft preparation, S.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Boukas, E.K. Stochastic Switching Systems: Analysis and Design; Birkhauser: Basel, Switzerland, 2004. [Google Scholar]
- Costa, O.L.V.; Fragoso, M.D.; Marques, R.P. Discrete-Time Markov Jump Linear Systems; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Dragan, V.; Morozan, T.; Stoica, A.-M. Mathematical Methods in Robust Control of Discrete-Time Linear Stochastic Systems; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Dragan, V.; Morozan, T.; Stoica, A.M. Mathematical Methods in Robust Control of Linear Stochastic Systems, 2nd ed.; Springer: New York, NY, USA, 2013. [Google Scholar]
- Costa, O.L.V.; Fragoso, M.D.; Todorov, M.G. Continuous-Time Markov Jump Linear Systems; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Hinrichsen, D.; Pritchard, A.J. Stability radii for linear systems. Syst. Control Lett. 1986, 34, 1–10. [Google Scholar] [CrossRef]
- Hinrichsen, D.; Pritchard, A.J. Stability radius for structured perturbations and the algebraic Riccati equation. Syst. Control Lett. 1986, 34, 105–113. [Google Scholar]
- El Bouhtouri, A.; El Hadri, K. Robust stabilization of jump linear systems subject to structured uncertainties in the state and input matrices. IMA J. Math. Control Inf. 2000, 17, 281–293. [Google Scholar] [CrossRef]
- Dragan, V.; Aberkane, S.; Popa, I.L. Robust Control of Jump Linear Stochastic Systems: Applications to Sampled-Data Control; Lecture Notes in Control and Information Sciences 497; Springer: Berlin/Heidelberg, Germany, 2025. [Google Scholar]
- Todorov, M.G.; Fragoso, M.D. A new perspective on the robustness of Markov jump linear systems. Automatica 2013, 49, 735–747. [Google Scholar] [CrossRef]
- El Bouhtouri, A.; Hinrichsen, D.; Pritchard, A.J. Stability radii of discrete-time stochastic systems with respect to block-diagonal perturbations. Automatica 2000, 36, 1033–1040. [Google Scholar] [CrossRef]
- El Bouhtouri, A.; El Hadri, K. Robust stabilization of discrete-time jump linear systems with multiplicative noise. IMA J. Math. Control Inf. 2005, 23, 447–462. [Google Scholar] [CrossRef]
- Kada, M.; Kameche, A.; Heddar, A.; Mennoun, A. Some new results about the stability radius of infinite-dimensional systems perturbed stochastically and deterministically. Int. J. Control 2025, 98, 944–957. [Google Scholar] [CrossRef]
- Doyle, J. Analysis of feedback systems with structured uncertainties. Proc. IEE 1986, 129, 242–250. [Google Scholar] [CrossRef]
- Hinrichsen, D.; Pritchard, A.J. Real and complex stability radii: A survey. In Control of Uncertain Systems; Hinrichsen, D., Martensson, B., Eds.; Progress in System and Control Theory; Birkhauser: Basel, Switzerland, 1990; Volume 6, pp. 119–162. [Google Scholar]
- Hinrichsen, D.; Pritchard, A.J. Stability Radii of Systems with Stochastic Uncertainty and Their Optimization by Output Feedback. SIAM J. Control Optim. 1997, 34, 1972–1998. [Google Scholar] [CrossRef]
- Dragan, V. Robust stabilization of discrete-time time-varying linear systems with Markovian switching and nonlinear parametric uncertainties. Int. J. Syst. Sci. 2014, 45, 1508–1517. [Google Scholar] [CrossRef]
- Aberkane, S.; Dragan, V. Robust Stability and Robust Stabilization of a Class of Discrete-Time Time-Varying Linear Stochastic Systems. SIAM J. Control Optim. 2015, 53, 30–57. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).