Abstract
The paradigm of stochastic antiresonance is considered for a class of nonlinear systems with sector bounded nonlinearities. Such systems arise in a variety of situations such as in engineering applications, in physics, in biology, and in systems with more general nonlinearities, approximated by a wide neural network of a single hidden layer, such as the error equation of Hopfield networks with respect to equilibria or visuo-motor tasks. It is shown that driving such systems with a certain amount of state-multiplicative noise, one can stabilize noise-free unstable systems. Linear-Matrix-Inequality-based stabilization conditions are derived, utilizing a novel non-quadratic Lyapunov functional and a numerical example where state-multiplicative noise stabilizes a nonlinear system exhibiting chaotic behavior is demonstrated.
1. Introduction
Stochastic Antiresonance (SAR) is an intriguing paradigm, wherein nonlinear dynamic systems that are unstable or just marginally so can be stabilized by driving them with state-multiplicative noise. The reverse phenomenon, Stochastic Resonance (SR), has been studied in the context of periodic occurrences of ice ages [1]. A few examples of SR were described and analyzed in [1,2], such as particle in a double well, animal behavior, sensory neurons and ionic channels in biological cells, optical systems, electronic devices, and so on. In one of these studies [2], SAR in laser systems was also analyzed. All these examples exhibit a bell-shaped Signal-to-Noise Ratio (SNR) as a function of the applied noise level. The action of SAR has also been studied (e.g., [3]) in the context of squid giant axons and the potential for therapeutic neurological applications was pointed out. Other antiresonance applications may also be found, for instance, in electronics and in mechanical engineering (e.g., [4,5,6]) for the vibration-suppression of certain components of the system. One may even consider the option of applying SAR as an alternative to deterministic adaptive controllers for neuromodulation (e.g., [7]). While many such paradigms can be analyzed using numerical simulations of the relevant dynamic models, the development of stochastic stability analysis tools may contribute to the reliability in applying SAR. Examples of such models are Hopfield networks [8], which are symmetric recurrent neural networks that exhibit motions in the state space converging to minima of energy. Such networks are mentioned in the context of practical complex problems such as the implementation of associative memory, linear programming, and so on, and also play an important role in understanding human motor tasks involving visual feedback (e.g., [9,10]).
The aim of the present paper, is to analyze the SAR phenomenon for a class of systems with sector-bounded nonlinearities, in order to explore the potential application of state-multiplicative noise to control and stabilize such systems. The considered type of nonlinearities have been widely used in the context of the absolute stability concept introduced by Lur’e [11] and further studied in, for instance [12,13,14], to mention only a few major developments. The interest in sector-bounded nonlinearities is due to the wide area of practical applications in which the physical plants include control saturations, modeling uncertainties, time-delays, and measurements quantizations.
The main results presented in this paper provide conditions for the occurrence of SAR, and they are derived using specific methods for the stability analysis of stochastic nonlinear systems. The theoretical developments are illustrated by numerical examples.
Throughout the paper, denotes the n dimensional Euclidean space, is the set of all real matrices, and the notation , (respectively, ) for means that X is symmetric and positive definite (respectively, semi-definite). denotes the trace of the matrix A and denotes its eigenvalue, whereas, and , respectively, denote the maximum and minimum eigenvalues of a symmetric matrix A.
Furthermore, for will denote . Throughout the paper, is a given probability space. Expectation is denoted by .
2. Preliminaries
In the present paper, we deal with stochastic systems that involve state-multiplicative noise represented using Itô type stochastic differential equations (SDEs) as follows:
where is a zero mean r-dimensional Wiener process adapted to an increasing family of of -algebras , with . The state vector and it is assumed that the functions and satisfy the existence conditions for a unique solution of the above stochastic differential equation (see, e.g., [15,16,17]). For an initial condition at independent of the -algebra generated by , this solution will be denoted by . Assume that and , . Then, according to [18], the trivial solution of Equation (1) is called stable in probability for if for any and ,
Moreover, the solution is called asymptotically stable in probability if it is stable in probability and if
One can prove (see, e.g., [18]) that is asymptotically stable in probability if there exists a twice continuously differentiable positive definite function such that , where the infinitesimal generator has the expression [16,17]
in which and denote the first-order partial derivatives of with respect to t and x, respectively, and is its second partial derivative with respect to x. This result represents a generalization of the well-known Lyapunov’s theorem on asymptotic stability from the deterministic framework. Although this type of a stability is weaker than mean square exponential stability (see, e.g., [19]), it is still of practical value as we will see in the sequel.
3. Motivation
Consider the following linear continuous-time scalar stochastic system [20]
where and is a Wiener process with . This system is clearly unstable for . However, for , we choose [18,21] the positive definite function and calculate
Taking such that , it follows that for , the infinitesimal generator and, therefore, the origin is asymptotically stable in probability. We next see in Figure 1 a case of (Figure 1 top) and a case of (Figure 1 bottom).
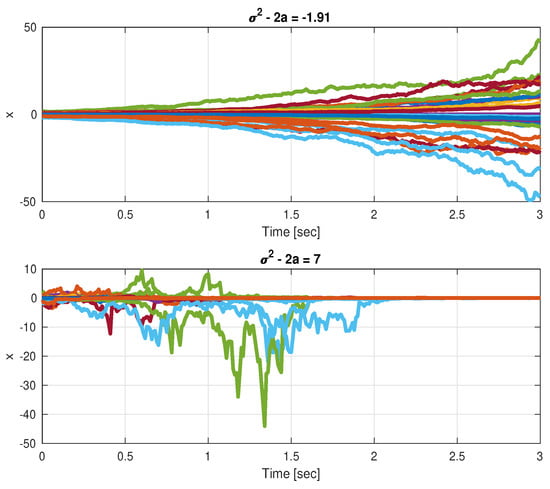
Figure 1.
A scalar system that is unstable without state-multiplicative noise, (top) SAR not attained, (bottom) SAR attained.
The SAR phenomenon seems, at first sight, to be counter-intuitive. Indeed, it often happens, e.g., in stable systems, that multiplicative noise can even drive a system to instability. However, the reverse phenomenon of SAR is even more intriguing. A somewhat similar phenomenon is well known to control practitioners where dither (high-frequency periodical excitation) added to a control signal can eliminate limit cycles, by a sort of linearization, e.g., in the case of systems with dead-zone nonlinearities that are smoothed by the dither. In such cases, practitioners apply classical frequency-domain approximate analysis, i.e., describing-function-based analysis, in order to determine the dither characteristics, to eliminate the unwanted limit cycle. In SAR, the exciting noise is a white state-multiplicative noise rather than a periodic one, and the white multiplicative noise seems to have a balancing effect, which can push the system back towards the origin upon large deviations. In our example of System (3), the noise-free equilibrium is ; however, due to , the system diverges. For non-zero x, the multiplicative noise term randomly provides corrections that either drive the system to zero, or away from zero, depending on the sign. Larger values of result in larger convergence rates to the origin. However, once the state x passes through , it stays there, since both the so-called drift term and the diffusion term are then nulled.
Our aim in the present paper is to demonstrate this intriguing phenomenon and provide an analysis tool that can determine an intensity of noise that can stabilize the system, such as the describing function does, in the case of dither.
4. Problem Formulation
Consider the following system:
where is the state vector, is the measured system output, and is a standard Wiener process with on the given probability space, which is also independent of . The elements of y are , where is the i’th row vector of C, namely , and the components of satisfy the sector conditions [11,22,23], which are equivalent to
Let us define, for the sequel, . We note that the model of System (4) is relevant also in cases where in the model is not a priori sector-bounded. In such cases, one may invoke the universal approximation theorem [24] to systems where a single hidden layer, with, e.g., a activation function and a linear output layer, provides an approximation with arbitrarily small error for an arbitrarily wide hidden layer. In such cases, the model of System (4) readily becomes relevant, as the approximate function is now sector-bounded. However, one should be very careful, as systems exhibiting chaotic behaviors may require a very high degree of approximation to maintain their chaotic nature.
5. Stability in Probability Analysis in the Absence of Nonlinearities
Consider first the simpler case where in System (4). The main result of this section is the following theorem.
Theorem 1.
If the following condition holds
then the solution of System (4) with and is asymptotically stable in probability.
Proof.
Consider the positive definite function
for which, one readily obtains that
We next denote
and obtain also
Plugging and into Expression (2) of the infinitesimal generator, we obtain
and using the above expressions derived above for and , the results show that
If we focus on the case , we obtain that
From Equation (7), it follows that and, therefore,
Taking into account the condition (6) from the statement, it follows that there exists a small enough such that
and, therefore, from Equation (9) it follows that , concluding, thus, that the solution of System (4) with is asymptotically stable in probability. □
6. Stability in Probability Analysis in the Presence of Nonlinearities
We consider now the case of in System (4). Assume that the following conditions are accomplished.
Hypothesis 1 (H1).
The derivatives of the nonlinearities are bounded, namely, there exist , , such that , and
Hypothesis 2 (H2).
The matrix C satisfies the condition .
Remark 1.
The assumption may be fulfilled if the matrix is nonsingular, performing the similarity transformation with , where Σ and U are obtained from the singular value decomposition . In the case when is not invertible, one may add fictitious new outputs such that C becomes invertible. The effect of these new added outputs may be vanished setting for their corresponding indices i.
Then, the following result provides asymptotic stability conditions for System (4).
Theorem 2.
Assume that the assumptions H1 and H2 hold. If there exist , , , , and , , such that
where and
then the solution of the stochastic system, System (4), with is asymptotically stable in probability for any sector-type nonlinearities , satisfying the conditions and , .
Proof.
Consider the positive definite function
with , and defined in Equation (7).
Then, direct computations give that
and
where was defined in the statement and the following notations have been used
Further, define
and the nonlinearities constraints
. Then, in accordance with the -procedure technique (see, e.g., [23]), the stability condition
is accomplished together with Constraints (15), if there exist , such that
Using the expressions of and of derived above, it follows that Equation (16) is equivalent to
where was defined in the statement.
Multiplying (17) by , one obtains for ,
Taking as in the previous case, , Inequality (18) becomes
which may be rewritten in the equivalent form
where the following notations have been introduced
Using the definition of from the statement, it follows that if Condition (10) is accomplished, then Inequality (20) holds for any . Thus, one concludes that together with the sector constraints , are fulfilled and, therefore, the solution of System (4) is asymptotically stable in probability. Thus, the proof ends. □
Remark 2.
The above result may be extended to the more general case of a non-scalar matrix . Thus, using the fact that and , one obtains that, if there exist , , , and , , such that
where
with , then the solution of the stochastic system, System (4), is asymptotically stable in probability. The proof is similar to that of Theorem 2 and, therefore, it is omitted.
Remark 3.
Note that Conditions (10) and (11) of Theorem 2, are convex in the system matrices and also in the noise intensity . These facts allow verification of the SAR condition not only in fixed values of , and but also within a convex hull of those parameters, allowing a merit beyond the one provided by numerical simulations. Note that the conservatism in the conditions of Theorem 2 can be reduced by expanding Condition (10) using Schur complements as
where
and α is a scalar that can be found using line search.
Remark 4.
Note that if the conditions of Theorem 2 are fulfilled, then the solution is also exponentially p-stable for , as detailed in the Appendix A.
7. Numerical Examples
In this section, two numerical examples illustrating the previous theoretical results will be presented. The first corresponds to the case when no nonlinearity is present in System (4). The second is an application to a chaos model of the form System (4) with a nonlinearity.
Example 1.
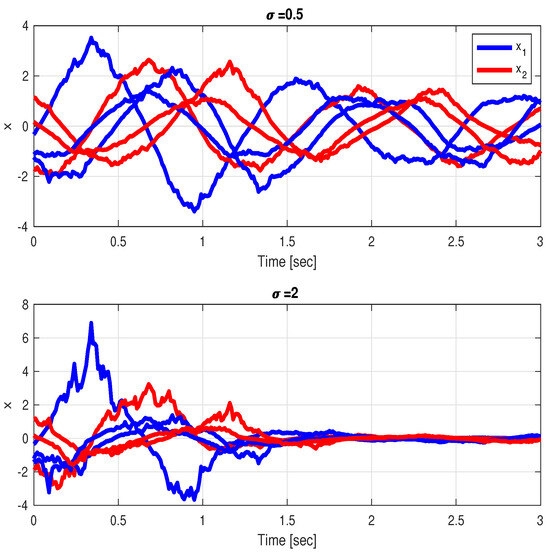
Consider an open-loop unstable system of the form System (4) with , with a natural frequency of 5 rad/s and damping coefficient of . The dynamic matrix of this system is
One can see that in this case, . We consider a couple of values of the driving noise intensity, corresponding to and . For , Condition (6) from Theorem 1 is fulfilled and therefore the solution is asymptotically stable in probability. This conclusion is illustrated in Figure 2, which presents the time responses of the states of the system. It can be shown that the case with too small σ fails to achieve SAR whereas the case with large enough σ achieves SAR.
Figure 2.
Second-order system subject to state-multiplicative noises of different intensities, (top) For , , SAR not attained, (bottom) For , , SAR attained.
Example 2.
We next consider a slightly modified version of the third-order chaos generator model of [25] with a single nonlinearity, described by System (4) and
where , and . The nonlinearity is . In order to apply the result of Theorem 2 together with its assumptions, one defined , , , and . Checking for different values of and , the feasibility of Inequality (10), which is linear with respect to the variables Λ and , one obtains that, for instance, for and , the conditions of Theorem 2 for asymptotic stability in probability of the considered system are accomplished by and , in which we used [26] to solve the linear matrix inequalities from the statement of Theorem 2.
Next, we simulate the above system for 1000 s with an integration step of 0.001 s with for s and for the rest of the time. The results are given in Figure 3 and Figure 4. The phase-plane (i.e., versus ) trajectories are depicted in Figure 3, and the components of the state vector as a function of time are depicted in Figure 4. It can be seen from these figures that the chaotic behavior characterizing the system without the state-multiplicative noise is replaced by a stable trajectory at s, in which SAR is attained. Thus, the feasibility of stabilization by multiplicative noise is demonstrated, using the stochastic control input .
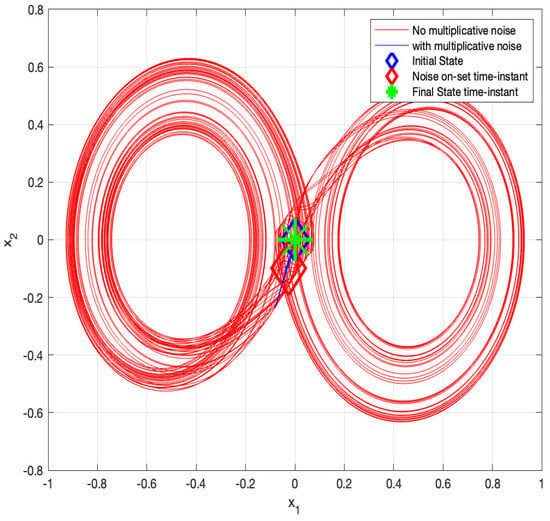
Figure 3.
vs. : Chaos stabilization using multiplicative noise, the original jumps to at s.
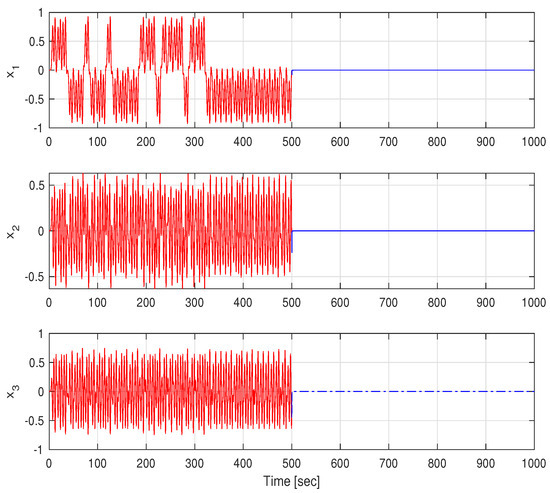
Figure 4.
States time responses before and after applying the state-multiplicative noise.
8. Conclusions
The phenomenon of Stochastic Antiresonance (SAR) for a class of systems with sector-bounded nonlinearities has been considered. The stochastic stability is analyzed using a specific non-quadratic version of a Lur’e-type function for the considered application. This analysis leads to sufficient conditions for stability that are expressed as Linear Matrix Inequalities (LMIs), which, in turn, can be solved using standard convex optimization packages. Using those LMIs, one can determine the intensity of the state-multiplicative noise that stabilizes a noise-free unstable system, including systems that exhibit a chaotic behavior. One such system has been numerically simulated in which it has been shown that stability is attained (i.e., oscillations decay) shortly after the onset of the state-multiplicative noise, namely achieving SAR. The intensity of the applied noise that achieves SAR is in accordance to the LMI conditions. The considered class of systems with sector-bounded nonlinearities correspond to a large number of practical applications. However, although the presented developments do not yet comply with biological neuron models, the success in stability analysis and SAR demonstration encourages further research to treat more general models, such as [3], and more complex ones, on the way of using noise in neuromodulation and other applications, serving as a means of control rather than as a destructive effect. The possible modeling approach for such systems, may apply approximate replacement of continuous nonlinearities not complying with the sector conditions with function-fitting neural networks of a single hidden layer through a sector-bounded activation function and a linear output layer. The latter modeling approach is left as a topic for future research. One may also consider exploring possible SAR in other fields, e.g., aero-elastic systems, where Stochastic Resonance emerges as a response to additive noise [27]. Subsequent developments may be dedicated to the case when the linear terms of System (4) are replaced by nonlinear functions satisfying some smoothness, boundedness, and commutation assumptions, as considered in [28]. Furthermore, alternative stability analysis approaches can be used, using, for instance, the almost global stochastic stability conditions derived in [29].
Author Contributions
Conceptualization, A.-M.S. and I.Y.; methodology, A.-M.S. and I.Y.; software, A.-M.S. and I.Y.; validation, A.-M.S. and I.Y.; formal analysis, A.-M.S. and I.Y.; investigation, A.-M.S. and I.Y.; writing—original draft preparation, A.-M.S. and I.Y.; writing—review and editing, A.-M.S. and I.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Data Availability Statement
The paper contains all the data needed for reproducting the presented numerical results.
Conflicts of Interest
Isaac Yaesh was employed by the company Elbit Systems. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Appendix A
In the following, we will prove that if the conditions of Theorem 2 are fulfilled, then the solution is also exponentially p-stable for . To this end, the following definition is recalled (see, e.g., [18]).
Definition A1.
The solution of the system (4) is called:
- (a)
- p-stable for if for , in which denotes the solution of the system (4) with the initial condition at ;
- (b)
- Asymptotically p-stable, if it is p-stable and if for ;
- (c)
- Exponentially p-stable, if there exist , such that .
The following result (e.g., [16,18]) provides the condition for exponential p-stability of the solution .
Proposition A1.
It will be shown that the conditions of Proposition A1 are fulfilled for . Indeed, consider the function defined by Equation (12). Since , the results show that .
Furthermore, using the fact that and that , the following inequalities hold
from which one deduces that and, therefore, the conditions (A1) are fulfilled. In order to prove condition (A2), one notices that a small enough may be taken such that if is replaced by , the inequality (20) holds for any . Therefore, the inequality of form (19) with the additional term in the left-hand-side is also true. After multiplying this latest inequality by , following the same steps as in the proof of Theorem 2 but in reverse order, it follows that . and, therefore, taking into account that, and Condition (15), one concludes that Condition (A2) is also accomplished for .
The above developments are concluded in the following result.
Corollary A1.
If the conditions of Theorem 2 are accomplished, then the solution of the stochastic system, System (4), with is exponentially p-stable where , for any sector-type nonlinearities , satisfying the conditions and , .
References
- Wellens, T.; Vyacheslav, S.; Buchleitner, B. Stochastic resonance. Rep. Prog. Phys. 2004, 67, 45. [Google Scholar] [CrossRef]
- Kalashnikov, V.L. Chaotic, Stochastic Resonance, and Anti-Resonance Phenomena in Optics. In Resonance; Intechopen: Rijeka, Croatia, 2017. [Google Scholar] [CrossRef][Green Version]
- Borkowski, L.S. Multimodal transition and stochastic antiresonance in squid giant axons. arXiv 2010, arXiv:1006.1069v. [Google Scholar] [CrossRef] [PubMed]
- Sundeep, S.; Wang, J.B.; Griffo, A.; Alvarez-Gonzales, F. Anti-resonance phenomenon and peak voltage stress within PWM inverter fed stator winding. IEEE Trans. Ind. Electron. 2021, 68, 11826–11836. [Google Scholar] [CrossRef]
- Jeong, W.B.; Yoo, W.S.; Kim, J.Y. Sensitivity analysis of anti-resonance frequency for vibration test control of a fixture. Ksme Int. J. 2003, 17, 1732–1738. [Google Scholar] [CrossRef]
- Kremer, E. Stochastic Resonances and Antiresonances in Rotating Mechanisms. In Advances in Nonlinear Dynamics; Lacarbonara, W., Balachandran, B., Leamy, M.J., Ma, J., Tenreiro Machado, J.A., Stepan, G., Eds.; NODYCON Conference Proceedings Series; Springer: Cham, Switzerland, 2022. [Google Scholar]
- Fyon, A.; Sacre, P.; Franci, A.; Drion, G. Reliable neuromodulation from adaptive control of ion channel expression. In Proceedings of the 22nd IFAC World Congress, Yokohama, Japan, 9–14 July 2023. [Google Scholar]
- Haykin, S. Neural Networks—A Comprehensive Foundation; Prentice-Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Cabrera, J.L.; Bormann, R.; Eurich, C.; Ohira, T.; Milton, J. State-dependent noise and human balance control. Fluct. Noise Lett. 2001, 4, L107–L118. [Google Scholar] [CrossRef]
- Cabrera, J.L.; Milton, J.G. On-Off Intermitency in a Human Balancing Task. Phys. Rev. Lett. 2002, 89, 15870. [Google Scholar] [CrossRef] [PubMed]
- Lure, A.I.; Postnikov, V.N. On the theory of stability of control systems. Appl. Math. Mech. 1944, 8, 246–248. (In Russian) [Google Scholar]
- Aĭzerman, M.A.; Gantmakher, F.R. Absolute Stability of Regulator Systems; Holden Day: San Francisco, CA, USA, 1964. [Google Scholar]
- Popov, V.-M. Hyperstability of Control Systems; Springer: New York, NY, USA, 1973. [Google Scholar]
- Yakubovich, V.A.; Leonov, G.A.; Gelig, A.K. Stability of Stationary Sets in Control Systems with Discontinuous Nonlinearities; World Scientific: Singapore, 2004. [Google Scholar]
- Friedman, A. Stochastic Differential Equations and Applications; Academic Press: Cambridge, MA, USA, 1975. [Google Scholar]
- Mao, X. Stability of Stochastic Differential Equations with Respect to Semimartingales; Longman Scientific & Technical: Essex, UK, 1991. [Google Scholar]
- Oksendal, B. Stochastic Differential Equations; Springer: Berlin/Heidelberg, Germany, 1998. [Google Scholar]
- Khasminskii, R. Stochastic Stability of Differential Equations, 2nd ed.; Springer: New York, NY, USA, 2012. [Google Scholar]
- Stoica, A.-M.; Yaesh, I. Markovian Jump-delayed Hopfield Networks with Multiplicative Noise. Automatica 2008, 44, 2157–2162. [Google Scholar] [CrossRef]
- Jazwinski, A.H. Stochastic Processes and Filtering Theory; Academic Press: Cambridge, MA, USA, 1970. [Google Scholar]
- Shaikhet, L. Some Unsolved Problems in Stability and Optimal Control Theory of Stochastic Systems. Mathematics 2022, 10, 474. [Google Scholar] [CrossRef]
- Banjerdpongchai, D.; Kimura, H. Robust Analysis of Discrete-Time Lur’e Systems with Slope Restrictions using Convex Optimization. Asian J. Control 2002, 4, 119–126. [Google Scholar] [CrossRef]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- Cybenko, G. Approximation by Superpositions of a Sygmoidal Function. Math. Control Signals Syst. 1989, 2, 303–314. [Google Scholar] [CrossRef]
- Kwok, H.S.; Zhong, G.Q.; Tang, W.K.S. Use of Neurons in Chaos Generation. In Proceedings of the ICONS 2003, Faro, Portugal, 26–27 June 2003. [Google Scholar]
- Löfberg, J. YALMIP: A Toolbox for Modeling and Optimization in MATLAB. In Proceedings of the CACSD Conference, Taipei, Taiwan, 2–4 September 2004. [Google Scholar]
- Varun, H.S.; Aswathy, M.S.; Sarkar, S. Stochastic Resonance in a Parametrically Perturbed Aeroelastic System. In Proceedings of the ENOC 2020, Lyon, France, 5–10 July 2020. [Google Scholar]
- Freedman, M.I.; Willems, J.C. Smooth Representation of Systems with Differential Inputs. IEEE Trans. Autom. Control 1978, 23, 16–21. [Google Scholar] [CrossRef]
- Van Handel, R. Almost global stochastic stability. Siam J. Control Optim. 2006, 45, 1297–1313. [Google Scholar] [CrossRef][Green Version]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).