


Almost Surely Exponential Convergence Analysis of Time Delayed Uncertain Cellular Neural Networks Driven by Liu Process via Lyapunov–Krasovskii Functional Approach

{kind=link}
Abstract
:1. Introduction
- We investigate in-depth in this paper a class of DUCNNs driven by a canonical Liu process for the stability of their equilibrium states (or fixed points). As alluded to previously, the dynamics of NNs is inevitably influenced by a random (stochastic) environment. And analogously, humans’ subjective cognition based on intuition or inspection (in terms of belief degree) may have some influence on the structure of NNs when the workers are designing the NNs, and therefore have a certain influence on the dynamics of the constructed NNs. Therefore, the research results concerning uncertain NNs may be more suitable and reliable for the decision makers. Uncertainty theory laid the foundation (the notion of belief degree on measurable spaces) of the mathematical theory that are capable of portraying quantitatively humans’ subjective cognition. Therefore, it is of great importance to study uncertain NNs for the large time behavior of their state trajectories. By reviewing the existing references, we conclude that our research results in this paper seem to be new. For example, in comparison with Reference [23], in which stability criteria were provided in terms of moments, our aim in this paper is to provide a stability criterion in the sample sense for DUCNNs. For another example, in contrast with Reference [21], our concerned model DUCNNs include discrete time and finitely distributed time delay.
- Via applying the classical Contraction Mapping Principle, we establish a criterion (see Theorem 1 in Section 3), and prove that this criterion can guarantee that our concerned model DUCNNs have unique equilibrium states (or fixed points).
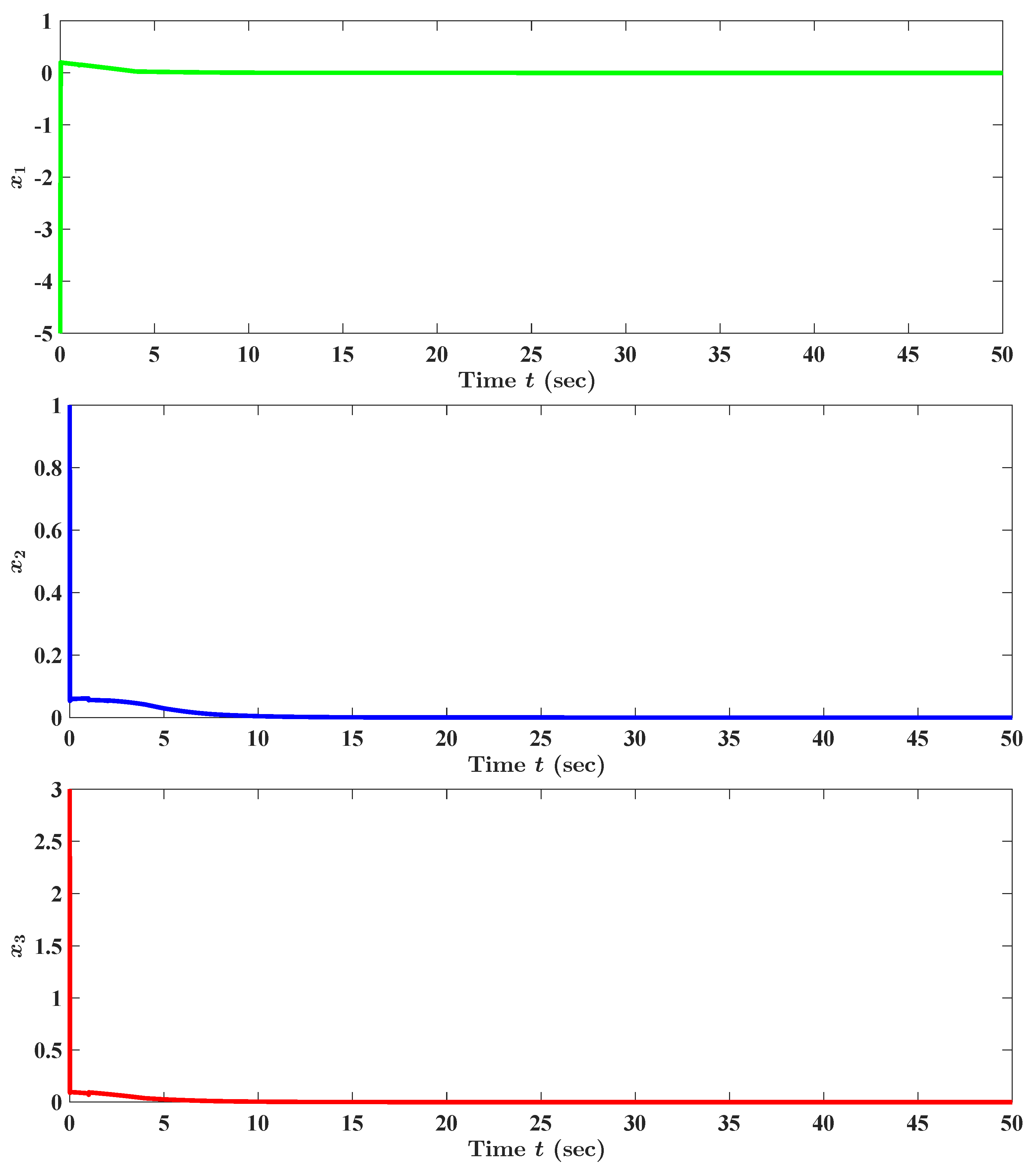
- We design meticulously a class of Lyapunov–Krasovskii functionals, which take into account the after-effect (or time delay) in our concerned model DUCNNs, analyze in detail our concerned model DUCNNs with these coined Lyapunov–Krasovskii functionals as the key tools, and establish a criterion to ensure that equilibrium states (or fixed points) of our concerned model DUCNNs be almost surely exponentially stable; see Theorem 2 in Section 3. We also come up with a specific example DUCNN to validate our theoretical results; see Section 4.
2. Preliminaries and Formulation of the Problems
2.1. Some Preliminaries
- (Normality). It holds always that ;
- (Self-duality). It holds always that for every event A in ;
- (Countable subadditivity). For every sequence in , it holds always that
- , and
- has stationary and independent increments;
- For every and every , the increment is a normal uncertain variable with expected value 0 and variance .
2.2. Formulation of the Problems and Main Assumptions
3. Main Results and the Proofs
4. Numerical Validation of the Theoretical Observations
5. Concluding Remarks
Author Contributions
Funding
Conflicts of Interest
References
- Chua, L.O.; Yang, L. Cellular neural networks: Theory. IEEE Trans. Circuits Syst. 1988, 35, 1257–1272. [Google Scholar] [CrossRef]
- Chua, L.O.; Yang, L. Cellular neural networks: Applications. IEEE Trans. Circuits Syst. 1988, 35, 1273–1290. [Google Scholar] [CrossRef]
- Wang, F.; Wang, C. Mean-square exponential stability of fuzzy stochastic BAM networks with hybrid delays. Adv. Differ. Equ. 2018, 2018, 235. [Google Scholar] [CrossRef]
- Wang, C.; Zhao, X.; Wang, Y. Finite-time stochastic synchronization of fuzzy bi-directional associative memory neural networks with Markovian switching and mixed time delays via intermittent quantized control. AIMS Math. 2023, 8, 4098–4125. [Google Scholar] [CrossRef]
- Kong, F.; Zhu, Q.; Wang, K.; Nieto, J.J. Stability analysis of almost periodic solutions of discontinuous BAM neural networks with hybrid time-varying delays and D operator. J. Frankl. Inst. 2019, 356, 11605–11637. [Google Scholar] [CrossRef]
- Yang, X.; Qi, Q.; Shi, P.; Xiang, Z.; Qing, L. Non-weighted L2-gain analysis for synchronization of switched nonlinear time-delay systems with random injection attacks. IEEE Trans. Circuits Syst. I Regul. Pap. 2023, 6, 3759–3769. [Google Scholar] [CrossRef]
- Wang, M.; Yang, X.; Mao, S.; Fai, K.; Yiu, C.; Park, J.H. Consensus of multi-agent systems with one-sided Lipschitz nonlinearity via nonidentical double event-triggered control subject to deception attacks. J. Frankl. Inst. 2023, 360, 6275–6295. [Google Scholar] [CrossRef]
- Zhang, M.; Yang, X.; Xiang, Z.; Liu, X. Consensus of nonlinear MAS via double nonidentical mode-dependent event-triggered switching control. Appl. Math. Comput. 2023, 453, 128085. [Google Scholar] [CrossRef]
- Zhang, M.; Yang, X.; Xiang, Z.; Sun, Y. Monotone decreasing LKF method for secure consensus of second-order mass with delay and switching topology. Syst. Control Lett. 2023, 172, 105436. [Google Scholar] [CrossRef]
- Guo, B.; Shi, P.; Zhang, C. Aperiodically intermittent control for synchronization of stochastic coupled networks with semi-Markovian jump and time delays. Nonlinear Anal. Hybrid Syst. 2020, 38, 100938. [Google Scholar] [CrossRef]
- Guo, B.; Xiao, Y. Synchronization of Markov switching inertial neural networks with mixed delays under aperiodically on-off adaptive control. Mathematics 2023, 11, 2906. [Google Scholar] [CrossRef]
- Li, X.; Rakkiyappan, R.; Balasubramaniam, P. Existence and global stability analysis of equilibrium of fuzzy cellular neural networks with time delay in the leakage term under impulsive perturbations. J. Frankl. Inst. 2011, 348, 135–155. [Google Scholar] [CrossRef]
- Gilli, M.; Biey, M.; Civalleri, P.P. On the existence of stable equilibrium points in cellular neural networks. In Proceedings of the IEEE International Symposium on Circuits and Systems, Phoenix-Scottsdale, AZ, USA, 26–29 May 2002; p. 7431968. [Google Scholar] [CrossRef]
- Zhou, L.; Hu, G. Almost sure exponential stability of neutral stochastic delayed cellular neural networks. J. Control Theory Appl. 2008, 6, 195–200. [Google Scholar] [CrossRef]
- Zhu, Q.; Li, X. Exponential and almost sure exponential stability of stochastic fuzzy delayed Cohen–Grossberg neural networks. Fuzzy Sets Syst. 2012, 203, 74–94. [Google Scholar] [CrossRef]
- Liu, B. Uncertainty Theory; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar] [CrossRef]
- Chen, X.; Ralescu, D.A. Liu process and uncertain calculus. J. Uncertain Anal. Appl. 2013, 1, 3. [Google Scholar] [CrossRef]
- Chen, X.; Liu, B. Existence and uniqueness theorem for uncertain differential equations. Fuzzy Optim. Decis. Mak. 2010, 9, 69–81. [Google Scholar] [CrossRef]
- Gao, R. Stability in mean for uncertain differential equation with jumps. Appl. Math. Comput. 2019, 346, 15–22. [Google Scholar] [CrossRef]
- Yao, K.; Ke, H.; Sheng, Y. Stability in mean for uncertain differential equation. Fuzzy Optim. Decis. Mak. 2015, 14, 365–379. [Google Scholar] [CrossRef]
- Jia, Z.; Li, C. Almost sure exponential stability of uncertain stochastic Hopfield neural networks based on subadditive measures. Mathematics 2023, 11, 3110. [Google Scholar] [CrossRef]
- Tao, N.; Ding, C.; Zhu, Y. Stability and attractivity in pessimistic value for uncertain dynamical system. J. Intell. Fuzzy Syst. 2022, 42, 3029–3036. [Google Scholar] [CrossRef]
- Lu, Z.; Zhu, Y. Asymptotic stability in pth moment of uncertain dynamical systems with time-delays. Math. Comput. Simul. 2023, 212, 323–335. [Google Scholar] [CrossRef]
- Lu, Q.; Zhu, Y. Finite-time stability in measure for Nabla uncertain discrete linear fractional order systems. Math. Sci. 2022. [CrossRef]
- Lu, Q.; Zhu, Y.; Li, B. Finite-time stability in mean for Nabla uncertain fractional order linear difference systems. Fractals 2021, 29, 2150097. [Google Scholar] [CrossRef]
- Lu, Z.; Zhu, Y.; Xu, Q. Asymptotic stability of fractional neutral stochastic systems with variable delays. Eur. J. Control 2021, 57, 119–124. [Google Scholar] [CrossRef]
- Lu, Q.; Zhu, Y. Finite-time stability of uncertain fractional difference equations. Fuzzy Optim. Decis. Mak. 2020, 57, 239–249. [Google Scholar] [CrossRef]
- Tao, N.; Zhu, Y. Stability and attractivity in optimistic value for dynamical systems with uncertainty. Int. J. Gen. Syst. 2016, 45, 418–433. [Google Scholar] [CrossRef]
- Jia, Z.; Liu, X. Uncertain stochastic hybrid age-dependent population equation based on subadditive measure: Existence, uniqueness and exponential stability. Symmetry 2023, 15, 1512. [Google Scholar] [CrossRef]
- Li, H.; Zhu, Q. The pth moment exponential stability and almost surely exponential stability of stochastic differential delay equations with Poisson jump. J. Math. Anal. Appl. 2019, 471, 197–210. [Google Scholar] [CrossRef]
- Liu, L.; Zhu, Q. Almost sure exponential stability of numerical solutions to stochastic delay Hopfield neural networks. Appl. Math. Comput. 2015, 266, 698–712. [Google Scholar] [CrossRef]
- Wang, B.; Zhu, Q. The novel sufficient conditions of almost sure exponential stability for semi-Markov jump linear systems. Syst. Control Lett. 2020, 137, 104622. [Google Scholar] [CrossRef]
- Cong, S. Almost sure stability criterion for continuous-time linear systems with uniformly distributed uncertainty. Automatica 2023, 149, 110848. [Google Scholar] [CrossRef]
- Sun, X.; Zhao, D. An augmented result on almost sure exponential stability of semi-Markov jump systems. Syst. Control Lett. 2023, 171, 105414. [Google Scholar] [CrossRef]
- Shu, Y.; Li, B. Existence and uniqueness of solutions for uncertain nonlinear switched systems. Automatica 2023, 149, 110803. [Google Scholar] [CrossRef]
- Yao, K.; Gao, J.; Gao, Y. Some stability theorems of uncertain differential equation. Fuzzy Optim. Decis. Mak. 2013, 12, 3–13. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Jia, Z.; Zhang, Y.; Zhao, X. Almost Surely Exponential Convergence Analysis of Time Delayed Uncertain Cellular Neural Networks Driven by Liu Process via Lyapunov–Krasovskii Functional Approach. Entropy 2023, 25, 1482. https://doi.org/10.3390/e25111482
Wang C, Jia Z, Zhang Y, Zhao X. Almost Surely Exponential Convergence Analysis of Time Delayed Uncertain Cellular Neural Networks Driven by Liu Process via Lyapunov–Krasovskii Functional Approach. Entropy. 2023; 25(11):1482. https://doi.org/10.3390/e25111482
Chicago/Turabian StyleWang, Chengqiang, Zhifu Jia, Yulin Zhang, and Xiangqing Zhao. 2023. "Almost Surely Exponential Convergence Analysis of Time Delayed Uncertain Cellular Neural Networks Driven by Liu Process via Lyapunov–Krasovskii Functional Approach" Entropy 25, no. 11: 1482. https://doi.org/10.3390/e25111482
APA StyleWang, C., Jia, Z., Zhang, Y., & Zhao, X. (2023). Almost Surely Exponential Convergence Analysis of Time Delayed Uncertain Cellular Neural Networks Driven by Liu Process via Lyapunov–Krasovskii Functional Approach. Entropy, 25(11), 1482. https://doi.org/10.3390/e25111482