Morphological Computation: Synergy of Body and Brain


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. A Synergistic Perspective on Morphological Computation
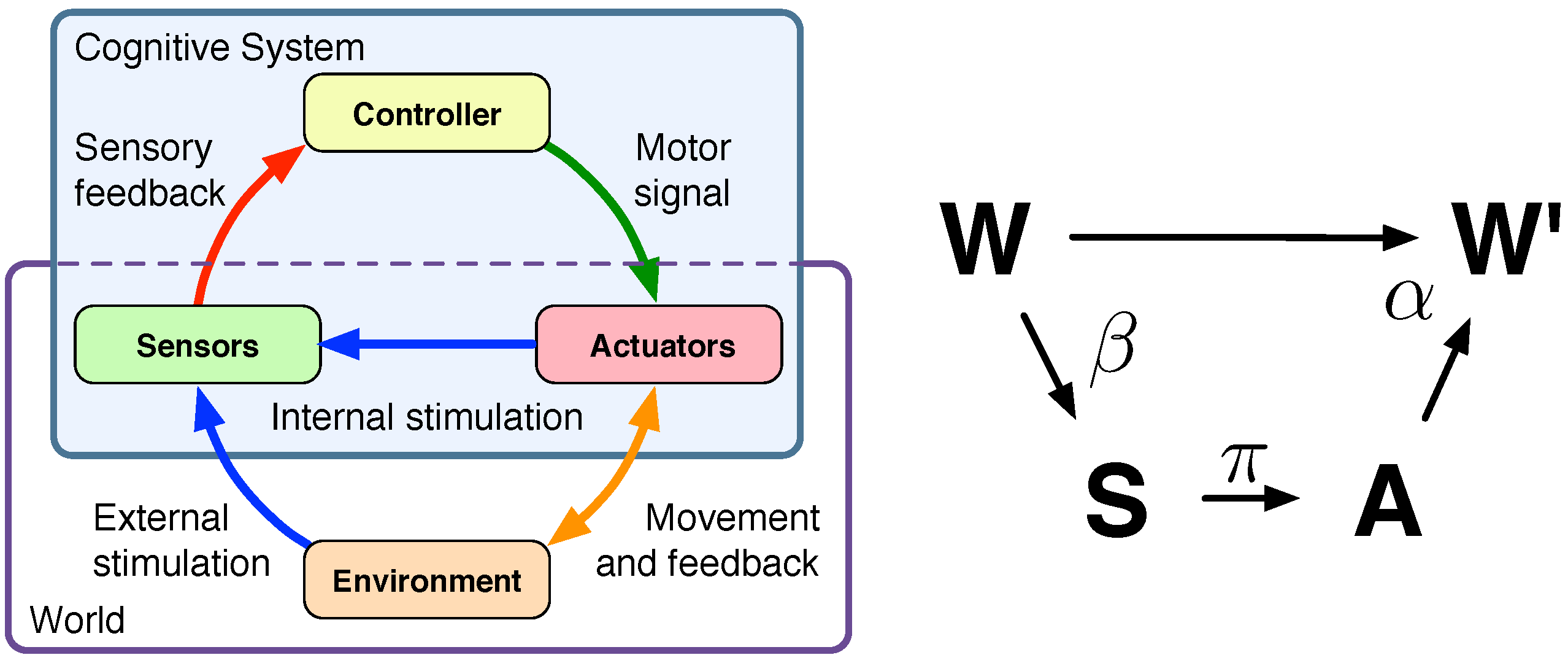
2.1. Causal Model of the Sensorimotor Loop
2.2. Quantifying Morphological Computation as Synergistic Information
2.3. Synergistic Information Based on the Decomposition of the Multivariate Mutual Information
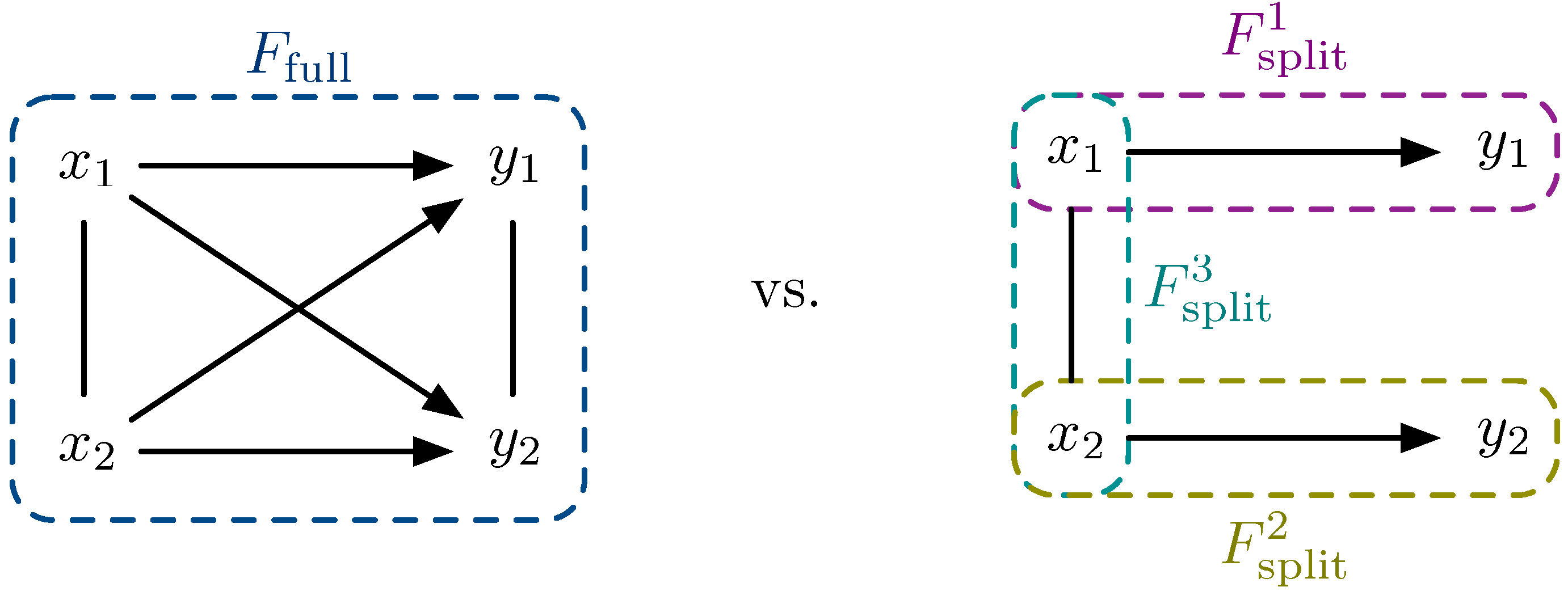
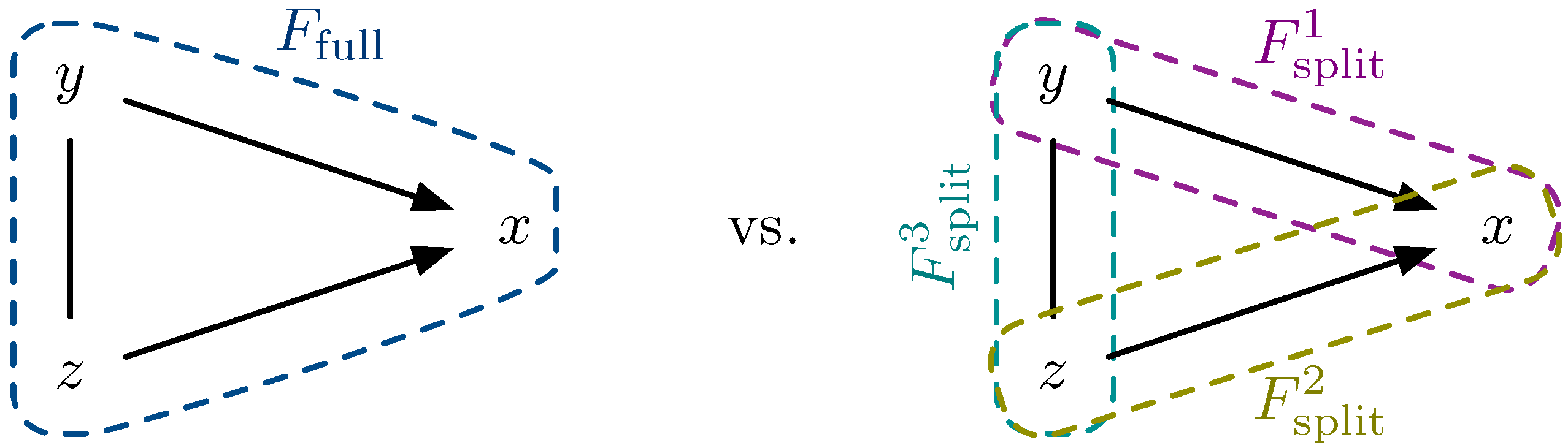
2.4. Synergistic Information as the Difference between the Whole and the Sum of Its Parts
2.5. Maximum Entropy Estimation with the Iterative Scaling Algorithm
3. Parametrised Model of the Sensorimotor Loop
3.1. Binary Model of the Sensorimotor Loop
3.1.1. Non-Binary Model of the Sensorimotor Loop
4. Numerical Simulations
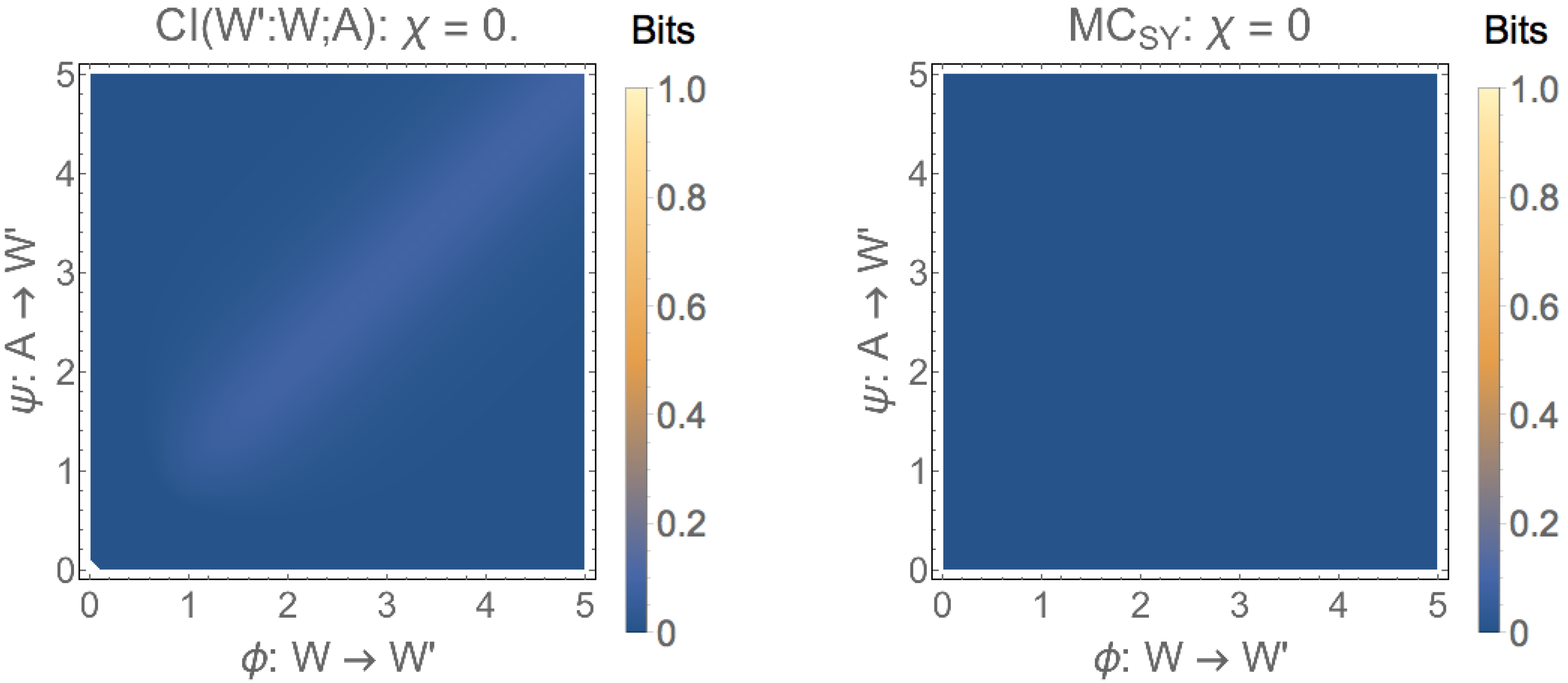
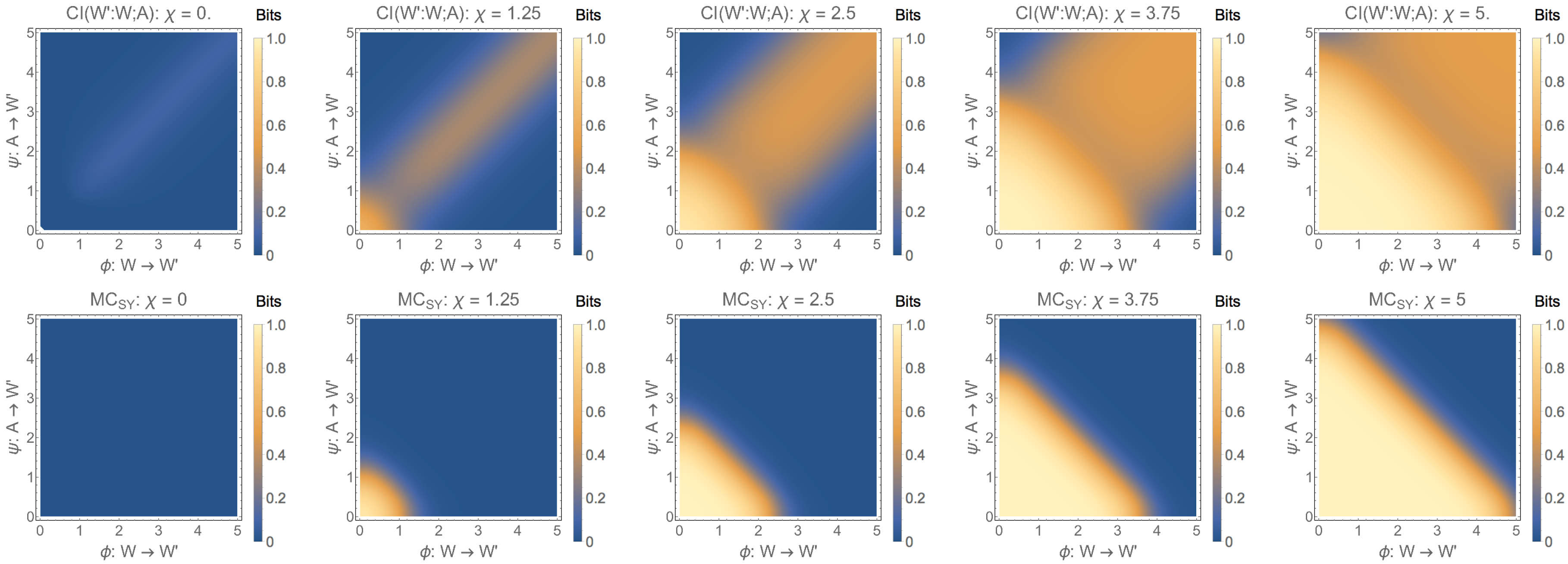
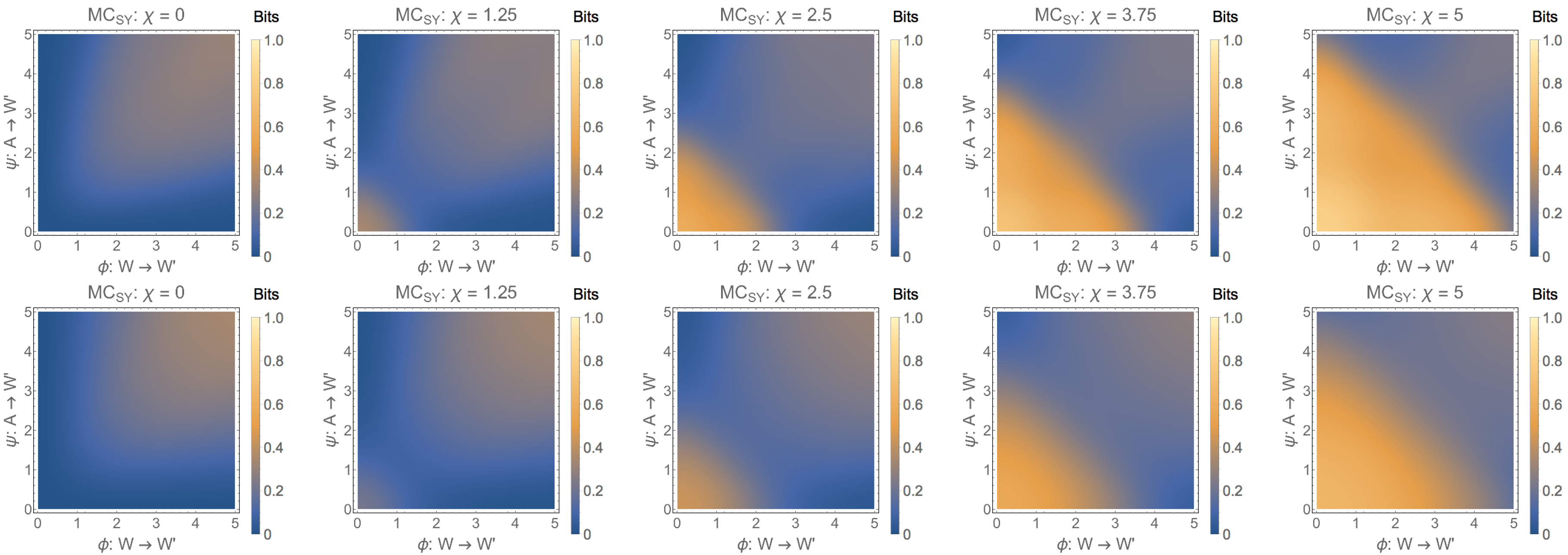
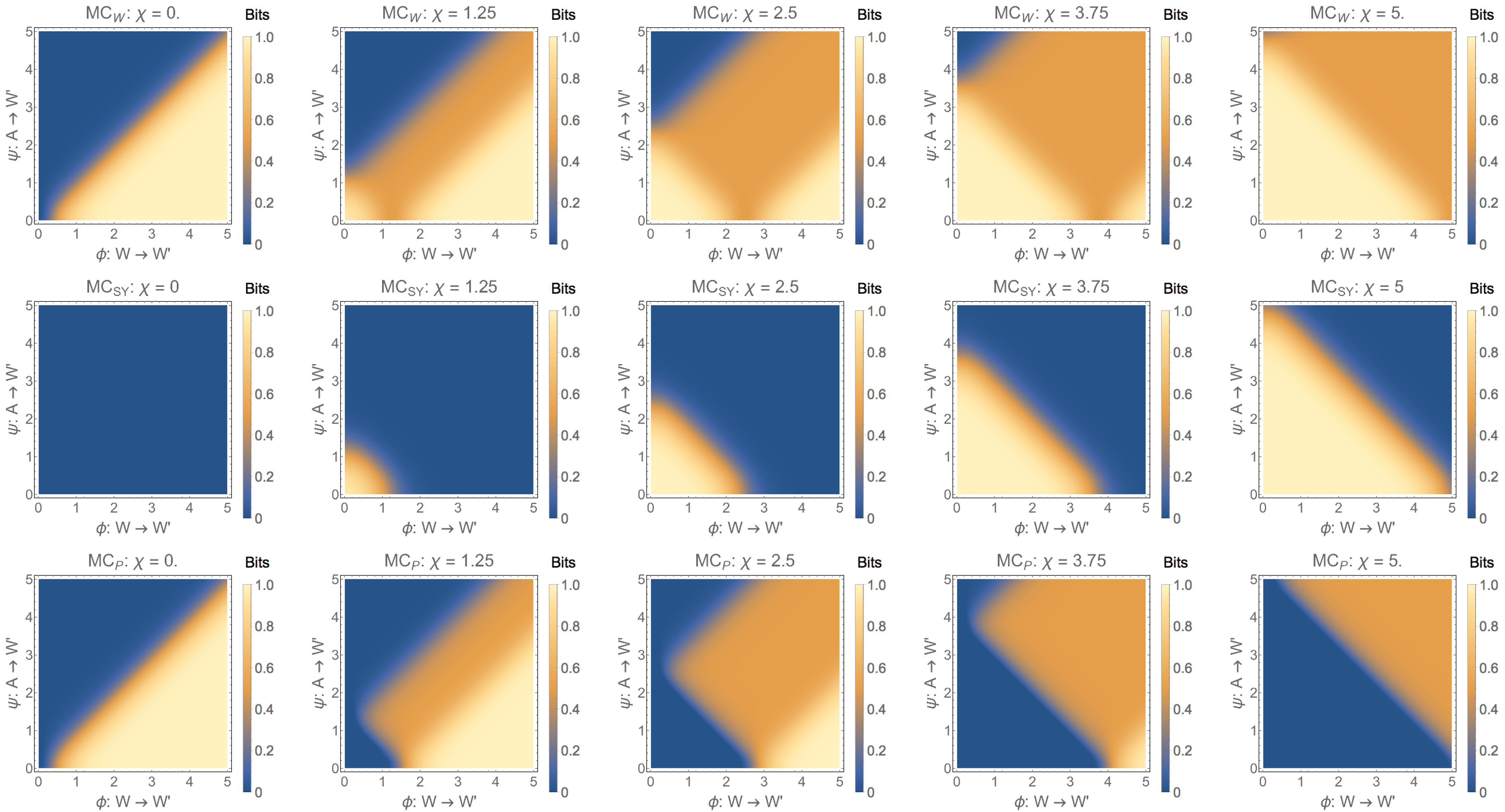
4.1. Results for the Binary Sensorimotor Loop
4.2. New Measure for Unique Information
5. Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ghazi-Zahedi, K.; Deimel, R.; Montúfar, G.; Wall, V.; Brock, O. Morphological Computation: The Good, the Bad, and the Ugly. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Valero-Cuevas, F.J.; Yi, J.W.; Brown, D.; McNamara, R.V.; Paul, C.; Lipson, H. The tendon network of the fingers performs anatomical computation at a macroscopic scale. IEEE Trans. Biomed. Eng. 2007, 54, 1161–1166. [Google Scholar] [CrossRef] [PubMed]
- Brown, E.; Rodenberg, N.; Amend, J.; Mozeika, A.; Steltz, E.; Zakin, M.R.; Lipson, H.; Jaeger, H.M. Universal robotic gripper based on the jamming of granular material. Proc. Natl. Acad. Sci. USA 2010, 107, 18809–18814. [Google Scholar] [CrossRef]
- Beal, D.N.; Hover, F.S.; Triantafyllou, M.S.; Liao, J.C.; Lauder, G.V. Passive propulsion in vortex wakes. J. Fluid Mech. 2006, 549, 385–402. [Google Scholar] [CrossRef]
- Liao, J.C.; Beal, D.N.; Lauder, G.V.; Triantafyllou, M.S. Fish Exploiting Vortices Decrease Muscle Activity. Science 2003, 302, 1566–1569. [Google Scholar] [CrossRef] [PubMed]
- Ziegler, M.; Iida, F.; Pfeifer, R. “Cheap” underwater locomotion: Roles of morphological properties and behavioral diversity. In Proceedings of the 9th International Conference on Climbing and Walking Robots, Brussels, Belgium, 12–14 September 2006. [Google Scholar]
- Zhao, Q.; Nakajima, K.; Sumioka, H.; Hauser, H.; Pfeifer, R. Spine dynamics as a computational resource in spine-driven quadruped locomotion. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1445–1451. [Google Scholar]
- Iida, F.; Pfeifer, R. “Cheap” rapid locomotion of a quadruped robot: Self-stabilization of bounding gait. In Proceedings of the International Conference on Intelligent Autonomous Systems, Tokyo, Japan, 7–9 March 2004; pp. 642–649. [Google Scholar]
- McGeer, T. Passive walking with knees. In Proceedings of the International Conference on Robotics and Automation, Cincinnati, OH, USA, 13–18 May 1990; pp. 1640–1645. [Google Scholar]
- Rieffel, J.A.; Valero-Cuevas, F.J.; Lipson, H. Morphological communication: Exploiting coupled dynamics in a complex mechanical structure to achieve locomotion. J. R. Soc. Interface 2010, 7, 613–621. [Google Scholar] [CrossRef] [PubMed]
- Franceschini, N.; Pichon, J.M.; Blanes, C.; Brady, J. From insect vision to robot vision. Philos. Trans. R. Soc. B 1992, 337, 283–294. [Google Scholar] [CrossRef]
- Paul, C. Morphological computation: A basis for the analysis of morphology and control requirements. Robot. Auton. Syst. 2006, 54, 619–630. [Google Scholar] [CrossRef]
- Pfeifer, R.; Bongard, J.C. How the Body Shapes the Way We Think: A New View of Intelligence; The MIT Press (Bradford Books): Cambridge, MA, USA, 2006. [Google Scholar]
- Ghazi-Zahedi, K.; Haeufle, D.F.; Montufar, G.F.; Schmitt, S.; Ay, N. Evaluating Morphological Computation in Muscle and DC-motor Driven Models of Hopping Movements. Front. Robot. AI 2016, 3. [Google Scholar] [CrossRef]
- Zahedi, K.; Ay, N. Quantifying Morphological Computation. Entropy 2013, 15, 1887–1915. [Google Scholar] [CrossRef]
- Horsman, C.; Stepney, S.; Wagner, R.C.; Kendon, V. When does a physical system compute? Proc. R. Soc. A 2014, 470. [Google Scholar] [CrossRef] [PubMed]
- Müller, V.C.; Hoffmann, M. What is Morphological Computation? On How the Body Contributes to Cognition and Control. Artif. Life 2017, 23, 1–24. [Google Scholar] [CrossRef] [PubMed]
- Füchslin, R.M.; Dzyakanchuk, A.; Flumini, D.; Hauser, H.; Hunt, K.J.; Luchsinger, R.H.; Reller, B.; Scheidegger, S.; Walker, R. Morphological Computation and Morphological Control: Steps toward a Formal Theory and Applications. Artif. Life 2012, 19, 9–34. [Google Scholar] [CrossRef] [PubMed]
- Hauser, H.; Ijspeert, A.; Füchslin, R.M.; Pfeifer, R.; Maass, W. Towards a theoretical foundation for morphological computation with compliant bodies. Biol. Cybern. 2011, 105, 355–370. [Google Scholar] [CrossRef] [PubMed]
- Nowakowski, P.R. Bodily Processing: The Role of Morphological Computation. Entropy 2017, 19, 295. [Google Scholar] [CrossRef]
- Pfeifer, R.; Iida, F. Morphological computation: Connecting body, brain and environment. Jap. Sci. Mon. 2005, 58, 48–54. [Google Scholar]
- Pfeifer, R.; Lungarella, M.; Iida, F. Self-Organization, Embodiment, and Biologically Inspired Robotics. Science 2007, 318, 1088–1093. [Google Scholar] [CrossRef] [PubMed]
- Jaeger, H.; Haas, H. Harnessing Nonlinearity: Predicting Chaotic Systems and Saving Energy in Wireless Communication. Science 2004, 304, 78–80. [Google Scholar] [CrossRef] [PubMed]
- Maass, W.; Natschläger, T.; Markram, H. Real-Time Computing Without Stable States: A New Framework for Neural Computation Based on Perturbations. Neural Comput. 2002, 14, 2531–2560. [Google Scholar] [CrossRef] [PubMed]
- Nakajima, K.; Hauser, H.; Kang, R.; Guglielmino, E.; Caldwell, D.G.; Pfeifer, R. Computing with a muscular-hydrostat system. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 1504–1511. [Google Scholar]
- Hauser, H.; Corucci, F. Morphosis—Taking Morphological Computation to the Next Level. In Soft Robotics: Trends, Applications and Challenges: Proceedings of the Soft Robotics Week, April 25-30, 2016, Livorno, Italy; Laschi, C., Rossiter, J., Iida, F., Cianchetti, M., Margheri, L., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 117–122. [Google Scholar]
- Nurzaman, S.G.; Yu, X.; Kim, Y.; Iida, F. Guided Self-Organization in a Dynamic Embodied System Based on Attractor Selection Mechanism. Entropy 2014, 16, 2592–2610. [Google Scholar] [CrossRef]
- Nurzaman, S.G.; Yu, X.; Kim, Y.; Iida, F. Goal-directed multimodal locomotion through coupling between mechanical and attractor selection dynamics. Bioinspir. Biomim. 2015, 10, 025004. [Google Scholar] [CrossRef] [PubMed]
- Pfeifer, R.; Iida, F.; Gòmez, G. Morphological computation for adaptive behavior and cognition. Int. Congr. Ser. 2006, 1291, 22–29. [Google Scholar] [CrossRef]
- Pfeifer, R.; Gómez, G. Morphological Computation—Connecting Brain, Body, and Environment; Springer: Berlin/Heidelberg, Germany, 2009; pp. 66–83. [Google Scholar]
- Clark, A. Being There: Putting Brain, Body, and World Together Again; MIT Press: Cambridge, MA, USA, 1996. [Google Scholar]
- Ay, N.; Zahedi, K. On the causal structure of the sensorimotor loop. In Guided Self-Organization: Inception; Prokopenko, M., Ed.; Springer: Berlin, Germany, 2014; Volume 9. [Google Scholar]
- Ghazi-Zahedi, K.; Rauh, J. Quantifying Morphological Computation based on an Information Decomposition of the Sensorimotor Loop. In Proceedings of the 13th European Conference on Artificial Life (ECAL 2015), York, UK, 20–24 July 2015; pp. 70–77. [Google Scholar]
- Bertschinger, N.; Rauh, J.; Olbrich, E.; Jost, J.; Ay, N. Quantifying Unique Information. Entropy 2014, 16, 2161–2183. [Google Scholar] [CrossRef]
- Ay, N. Information Geometry on Complexity and Stochastic Interaction. Entropy 2015, 17, 2432–2458. [Google Scholar] [CrossRef]
- Perrone, P.; Ay, N. Hierarchical Quantification of Synergy in Channels. Front. Robot. AI 2016, 2, 35. [Google Scholar] [CrossRef]
- Von Foerster, H. On Self-Organizing Systems and Their Environments. In Understanding Understanding; Springer: New York, NY, USA, 2003; pp. 1–19. [Google Scholar]
- Von Uexkuell, J. A Stroll Through the Worlds of Animals and Men. In Instinctive Behavior; Schiller, C.H., Ed.; International Universities Press: New York, NY, USA, 1957; pp. 5–80. [Google Scholar]
- Ay, N.; Löhr, W. The Umwelt of an embodied agent—A measure-theoretic definition. Theory Biosci. 2015, 134, 105–116. [Google Scholar] [CrossRef] [PubMed]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; MIT Press: Cambridge, CA, USA, 1998. [Google Scholar]
- Schreiber, T. Measuring Information Transfer. Phys. Rev. Lett. 2000, 85, 461–464. [Google Scholar] [CrossRef] [PubMed]
- Bossomaier, T.; Barnett, L.; Harré, M.; Lizier, J.T. An Introduction to Transfer Entropy; Springer: Berlin, Germany, 2016. [Google Scholar]
- Tishby, N.; Pereira, F.C.; Bialek, W. The information bottleneck method. In Proceedings of the 37th Annual Allerton Conference on Communication, Control and Computing, Monticello, IL, USA, 29 September–1 October 1999; pp. 368–377. [Google Scholar]
- Griffith, V.; Koch, C. Quantifying Synergistic Mutual Information; Springer: Berlin/Heidelberg, Germany, 2014; pp. 159–190. [Google Scholar]
- Williams, P.L.; Beer, R.D. Nonnegative Decomposition of Multivariate Information. arXiv 2010, arXiv:10042515. [Google Scholar]
- Harder, M.; Salge, C.; Polani, D. Bivariate measure of redundant information. Phys. Rev. E 2013, 87, 012130. [Google Scholar] [CrossRef] [PubMed]
- Griffith, V.; Chong, E.K.P.; James, R.G.; Ellison, C.J.; Crutchfield, J.P. Intersection Information Based on Common Randomness. Entropy 2014, 16, 1985–2000. [Google Scholar] [CrossRef]
- Bell, A.J. The co-information lattice. In Proceedings of the Fifth International Workshop on Independent Component Analysis and Blind Signal Separation: ICA 2003, Nara, Japan, 1–4 April 2003. [Google Scholar]
- Amari, S.I. Information Geometry and Its Applications; Springer: Berlin, Germany, 2016. [Google Scholar]
- Oizumi, M.; Tsuchiya, N.; Amari, S.I. Unified framework for information integration based on information geometry. Proc. Natl. Acad. Sci. USA 2016, 113, 14817–14822. [Google Scholar] [CrossRef] [PubMed]
- Kanwal, M.S.; Grochow, J.A.; Ay, N. Comparing Information-Theoretic Measures of Complexity in Boltzmann Machines. Entropy 2017, 19, 16. [Google Scholar] [CrossRef]
- Darroch, J.N.; Ratcliff, D. Generalized Iterative Scaling for Log-Linear Models. Ann. Math. Stat. 1972, 43, 1470–1480. [Google Scholar] [CrossRef]
- Csiszár, I. I-Divergence Geometry of Probability Distributions and Minimization Problems. Ann. Probab. 1975, 3, 146–158. [Google Scholar] [CrossRef]
- Ghazi-Zahedi, K. Entropy++ GitHub Repository. Available online: http://github.com/kzahedi/entropy (accessed on 25 August 2017).








© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghazi-Zahedi, K.; Langer, C.; Ay, N. Morphological Computation: Synergy of Body and Brain. Entropy 2017, 19, 456. https://doi.org/10.3390/e19090456
Ghazi-Zahedi K, Langer C, Ay N. Morphological Computation: Synergy of Body and Brain. Entropy. 2017; 19(9):456. https://doi.org/10.3390/e19090456
Chicago/Turabian StyleGhazi-Zahedi, Keyan, Carlotta Langer, and Nihat Ay. 2017. "Morphological Computation: Synergy of Body and Brain" Entropy 19, no. 9: 456. https://doi.org/10.3390/e19090456
APA StyleGhazi-Zahedi, K., Langer, C., & Ay, N. (2017). Morphological Computation: Synergy of Body and Brain. Entropy, 19(9), 456. https://doi.org/10.3390/e19090456