1. Introduction
Noise commonly exists with the useful signal, and more noises in the system often lead to less channel capacity and worse detectability. People usually try to utilize a series of filters and algorithms to remove the unnecessary noise. Hence, understanding and mastering the distribution and characteristics of noise is an essential research topic in traditional signal detection theory. Nevertheless, although it may seem very counterintuitive, noise does play an active role in many signal processing problems, and the performance of some nonlinear systems can be enhanced via adding noise under certain conditions [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27]. The phenomenon that noise benefits system is the so-called stochastic resonance (SR), which was first proposed by Benzi
et al. [
1] in 1981 when they studied the periodic recurrence of ice gases. The positive effects of noise have drawn the attention of researchers in various fields. For example, the effect of SR on the global stability of complex networks is investigated in [
26]. Kohar and Sinha demonstrated how to utilize noise to make a bistable system behave as a memory device in [
27].
In the signal detection problem, researchers commonly care about how to increase the output signal-to-noise (SNR) [
7,
8,
9,
10,
11], the mutual information [
12,
13], or detection probability with a constant false alarm rate [
14,
15,
16,
17,
18,
19,
20], or how to decrease the Bayes risk [
21,
22] or the probability of error [
23] by adding additive noise to the input of system or changing the background noise level. As presented in [
8], the output SNR obtained by adding suitable noise to the input of system is higher than the input SNR. The research results in [
14] indicate that the detection probability of the sign detector can be increased by adding an appropriate amount of white Gaussian noise.
Depending on the detection metrics, the SR phenomenon for the hypothesis testing or detection problems are usually investigated according to the Bayesian, Minimax or Neyman–Pearson criteria. In [
23], the additive noise to optimize the performance of a suboptimal detector is explored according to Bayesian criterion under uniform cost assignment. It is demonstrated that the optimal noise to minimize the probability of error is a constant, and the improvability obtained by adding the constant noise can also be achieved via shifting the decision region without adding any additive noise. The probability distribution of the optimal additive noise to minimize Bayes risk is investigated in [
21] according to the restricted Bayesian criterion, which can be extended to Bayesian and Minimax criteria easily. For an M-ary hypothesis testing problem, the optimal noise is determined as a randomization of at most M mass points.
In [
15], a mathematical framework is established to search the optimal noise to maximize the detection probability based on Neyman–Pearson criterion. This leads to the very significant conclusion that the optimal noise is determined as the randomization of at most two discrete vectors. In addition, sufficient conditions whether the detection probability can or cannot be increased are given. However, from the perspective of Patel [
18], the proof of the optimal noise presented in [
15] has a little bit of a drawback. Moreover, the same noise enhanced problem for a fixed detector is researched through establishing a different mathematical framework in [
18], where the optimal noise to maximize detection probability is also proved as a random signal consisting of no more than two discrete points and the corresponding probabilities. The researchers in [
16] studied the noise enhanced detection performance for variable detectors according to the Neyman–Pearson criterion based on the results in [
15]. The optimal noise enhanced solution to maximize the detection probability is determined as a randomization of no more than two detector and constant vector pairs.
Through the comparison and analysis above, it is clear that most researchers have focused on the maximization of detection probability via additive noise and there are few studies which cover the field of the minimization of the false-alarm probability. We cannot exclude the possibility that the false-alarm probability can be decreased by adding noise without deteriorating the original detectability, especially for the case where the detection probability cannot be increased via adding any noise. For example, a noise enhanced model which can increase the detection probability and decrease the false-alarm probability simultaneously by adding noise is first formulated in [
25] for a fixed detector. In addition, the model is solved by a convex combination of the optimal noises for two limited cases,
i.e., the minimization of false-alarm probability and the maximization of detection probability. Nevertheless, it is obvious that the convex combination is usually not the optimal solution of the maximum overall improvement of the model. In this paper, we explore the optimal solution to maximize the overall improvement of detection and false-alarm probabilities directly instead of the convex combination. In practical applications, though the structure of the detector commonly cannot be replaced in many cases, some parameters of the detector can be varied to obtain a better performance. Moreover, the noise enhanced detection problems for a fixed detector can generally be achieved by simplifying the results for variable detectors directly. Thus, it is necessary to discuss the noise enhanced detection problems on the premise of variable detectors.
In order to obtain the optimal noise enhanced solution to maximize the overall improvement of detection and false-alarm probabilities for variable detectors under two inequality-constraints, we formulate a new framework to define six different disjoint sets of detector and discrete vector pairs based on the signs of the relative improvements of the detection and the false-alarm probabilities. Then we explore the optimal noise enhanced solutions for the maximum detection probability and the minimum false-alarm probability and give the corresponding algorithms in the new framework. Further, through some derivation, the optimal noise enhanced solution for the maximum overall improvement of detection and false-alarm probabilities is proved as a randomization of at most two detector and discrete vector pairs from two different sets, and the relationship among the three maximums is presented. In addition, the theoretical results for the case of allowing the randomization between detectors can be applied straightforwardly to the case where the randomization between detectors cannot be allowed. Namely, the optimization problem for variable detectors is simplified to choose a fixed detector and search the optimal additive noise when the randomization between detectors cannot be allowed. Actually, the maximization of detection probability in this paper is equivalent to the noise enhanced detection problem for variable detectors studied in [
16], which also needs all information of detection and false-alarm probabilities obtained by every detector and discrete vector pair. Indeed, the new framework subdivides the one set in [
16] into six subintervals. Based on the definition of the six sets, it is obvious that each detector and discrete vector pair as a component of additive noise is available, partially available, or unavailable to meet the two constraints. Then the available and partial available pairs can be utilized to construct the optimal noise enhanced solutions to satisfy different requirements. Namely, the division of six sets effectively provides the foundation for maximizing the relative improvements of detection and false-alarm probabilities, and the sum of them.
The main contributions of this paper can be summarized as follows:
Formulation of a new framework, where six different disjoint sets of detector and discrete vector pairs are defined according to two inequality-constraints.
Algorithms for the noise enhanced solutions to maximize the relative improvements of the detection and the false-alarm probabilities are given based on the new framework.
Noise enhanced solution of the maximum overall improvability is first provided based on the new framework and the relationship among the three maximums is explored.
Determination of the sufficient conditions for the improvability and nonimprovability under the two constraints.
The remainder of this paper is organized as follows: in
Section 2, three optimization problems for a binary hypothesis testing problem for a variable detector are proposed and the six disjoint sets of detector and discrete vector pairs are defined. In
Section 3, the optimal noise enhanced solutions for the three optimization problem are discussed when the randomization between detectors can or cannot be allowed and the corresponding algorithms are given. Numerical results are presented in
Section 4 and the conclusions are provided in
Section 5.
2. Problem Formulation
Consider a binary hypothesis testing problem as follows:
where
is the probability density function (pdf) of the observation
under
,
, and
. For any
, the probability of choosing
can be characterized by
and
. Generally,
is also treated as a decision function of the detector. In order to investigate the possible enhancement of detectability, a new noise modified observation
is obtained by adding an independent noise
to the original observation
,
i.e.,
. Correspondingly, the pdf of
under
can be expressed by the convolutions of
and
as below:
where
represents the symbol of convolution.
For the same detector, the decision function for
is the same as that for
. Then the detection and false-alarm probabilities based on the new noise modified observation
are calculated by:
According to the two constraints that
and
, where
and
represent the lower limit on the detection probability and the upper limit on the false-alarm probability, respectively, the following three important definitions are given by:
where
and
can be regarded as the relative improvements of the detection and false-alarm probabilities obtained by adding additive noise, respectively, and
is the sum of
and
.
In many cases, though the structure of the detector cannot be substituted, some parameters of it can be varied, such as decision threshold. In addition, the whole detector can also be replaced in some special cases. Instead of a fixed decision function
, we suppose that there exist a set of candidate decision functions written as
and any
can be utilized. Then for any decision function
,
, the detection and false-alarm probabilities based on
can be obtained by replacing
with
,
i.e.:
When the additive noise is a discrete vector with pdf
, where
denotes the delta function,
i.e.,
only if
and
otherwise,
. The corresponding noise modified detection and false-alarm probabilities can be rewritten as:
Accordingly, under the constraints of
and
, the relative improvements of the detection and false-alarm probabilities corresponding to the additive noise with pdf
can be written as:
In order to make full use of the information gained by the discrete vector , we define the following six mutually disjoint sets for each according to the values of and denoted by , , , , , . Further, define and , then , where and .
Accordingly, a framework is formulated by defining the six different sets. As a result, the purpose of this paper is to investigate the optimal noise enhanced solutions for the maximum , and , respectively, under the two inequality-constraints based on the new framework. Obviously, whether the pair of is useful, partially useful or unuseful for the noise enhancement can be determined according to the definitions of the six sets. For instance, any detector and discrete pair of , and can meet the two constraints that and , the maximum may be obtained by a suitable detector and discrete pair of or , the maximum may be achieved by a detector and discrete pair of or , and the maximum may be reached by a suitable detector and discrete pair of , or . In the following sections, the corresponding theorems and algorithms are provided.
3. The Noise Enhanced Solutions
Let , and be the maximum achievable , and , respectively, which are obtained by adding a discrete vector as additive noise when the randomization between detectors is allowed. Namely, , and . If anyone of , and is less than zero, and cannot be obtained by adding any noise. So this paper is studied under the conditions that , and are greater than zero.
In general, when the randomization between different detectors is allowed, the noise enhanced solution can be viewed as a randomization of one or more detector and noise pairs with the corresponding weights. Suppose that the additive noise pdf is for any
,
, then
,
and
can be expressed as:
where
and
. Generally, the additive noise for any
can be viewed as a randomization of finite or infinite discrete vectors,
i.e.,
, where
and
, and
is a finite or infinite positive integer.
3.1. The Optimal Noise Enhanced Solution to Maximize zd
From Equation (15),
can be rewritten as:
Further,
can also be expressed by:
where
,
,
,
,
,
,
. Let
. In other words,
is obtained by the randomization of two detector and discrete vector pairs from two different sets,
i.e.,
and
. Then
is the convex combination of multiple
, which means that
can be obtained by the randomization of multiple different randomizations consisting of two detector and discrete vector pairs
,
from two different sets with the corresponding probabilities. From Equation (18), if there exists at least one detector and discrete vector pair which belongs to
, the constraints
and
can be satisfied by choosing the suitable detector and adding the discrete vector. Otherwise, according to Equation (19) and the definitions of
, a randomization of two detector and discrete vector pairs from two different sets may satisfy the two constraints
and
.
Let the maximum achievable
obtained by any noise solution under the two constraints that
and
be denoted by
. Define
be the set of all detector and discrete vector pairs corresponding to
. Then the following theorem and corollary hold and the corresponding proofs are presented in
Appendix A.
Theorem 1. can be achieved by the randomization of at most two detector and discrete vector pairs and from two different sets, i.e., and .
Corollary 1. (a) If there exists at least one pair of which belongs to can be obtained by selecting and . (b) When , the corresponding to is zero. (c) When is obtained by the randomization of and from or with the respective probabilities and , or the detector and discrete pair .
Next, we try to search the maximum achievable
obtained by the randomization of
and
from
,
or
when
. Generally, the corresponding
and
can be expressed by:
where
and
. Under the constraint that
, the Lagrangian of the optimization problem of maximizing
can be formulated as:
where
denotes the distribution of
and
. According to the Lagrange duality, we have:
So solving the optimal solution to maximize
is equivalent to finding
and
to make Equation (23) hold. Let us define an auxiliary function
such that:
Let
and
be the respective suprema of
over the sets
and
,
i.e.,
Due to
when
,
is a decreasing function of
. When
,
, which means
increases with
. Thus, there exists one
such that
,
i.e., there are
and
such that
. So the
and the
obtained by the randomization between
and
with the respective probabilities
and
can be calculated by:
Combined with Equations (27) and (28), the
and the randomization of
and
are the solution of Equation (23),
i.e.,
is the maximum achievable
obtained by the randomization of
and
from
,
or
when
. Based on the analysis above, Algorithm B1 is provided in
Appendix B to search the two detector and discrete vector pairs.
3.2. The Optimal Noise Enhanced Solution to Maximize zfa
In this subsection, the optimal noise enhanced solution to maximize is considered. Let the maximum achievable obtained by any noise solution under the two constraints that and be denoted by . Define . Then the following theorem and corollary hold and the corresponding proofs are omitted here, which are similar to Theorem 1 and Corollary 1, respectively.
Theorem 2. can be obtained by the randomization of at most two detector and discrete vector pairs and from two different sets, i.e., and .
Corollary 2. (a) If there exists at least one pair of which also belongs to , can be achieved by selecting and . (b) When , the corresponding to is zero. (c) When , is obtained by the randomization of from , or and with the respective probabilities and , or the detector and discrete pair .
Then we focus on the maximum
obtained by the randomization of
from
,
or
and
with respective probabilities
and
when
. The corresponding
and
can be expressed by:
where
and
. Under the constraint of
, the Lagrangian of the maximization of
is:
The Lagrange duality suggests that:
In order to solve Equation (32), let us define an auxiliary function
such that:
Suppose that
and
are the respective suprema of
over the sets
and
,
i.e.,
When
,
and then
increases with
. Since
when
,
decreases with
. So there exists a
such that
. Namely, there exist
and
such that
. The
and the
obtained by the randomization between
and
with the respective probabilities
and
can be calculated by:
From Equations (36) and (37), the
and the randomization of
and
are the solution of Equation (32),
i.e.,
is the maximum achievable
obtained by the randomization of
from
,
or
and
when
. According to the derivation above, Algorithm B2 presented in
Appendix B can be utilized to search the corresponding detector and discrete vector pairs.
3.3. The Optimal Noise Enhanced Solution to Maximize z
Let represent the maximum achievable under the two constraints that and . Define . Next, the optimal noise enhanced solution to maximize is explored in this subsection, the related theorem and corollary are provided as below.
Theorem 3. can be obtained by the randomization of at most two detector and discrete vector pairs and from two different sets such that , and . The proof of Theorem 3 is also similar to Theorem 1 and omitted here.
Corollary 3. (a) If there exists at least one pair of belongs to , the maximum can be realized by choosing and . (b) If , . (c) If and , we have . The proofs are provided in Appendix A. Especially, when , we can select the two pairs and directly, according to the analysis above and the properties of , to form an available noise enhanced solution to make the value of as greater as possible.
If , then we can let and . Since , the maximum is achieved when . The greater the value of , the greater the value of . So and can be selected as and , where .
Similarly, when , let and , where .
3.4. Sufficient Conditions for and
In this section, according to the analysis from
Section 3.1 to
Section 3.3 and the properties of the six sets, the sufficient conditions which can or cannot satisfy the two constraints
and
are determined as below.
Theorem 4. (a) If , any pair can meet and ; (b) When , if there exist and such that:then and can be realized by the randomization of and , otherwise there exists no noise enhanced solution to make and hold. The proofs are presented in Appendix A. When no randomization between detectors is allowed, only one detector can be selected to utilize. Suppose that the selected detector is , the conclusions for the case of allowing randomization between detectors can be applied to the case of nonrandomization between detectors straightforwardly by replacing with and , where .
4. Numerical Results
In this section, a binary hypothesis-testing problem is considered to verify the theoretical results explored in the previous sections. The binary hypotheses are given by:
where
,
is a known constant, and
are independent identically distributed (i.i.d.) symmetric Gaussian mixture noise samples such that:
where
. The test statistic of a suboptimal detector is shown as:
where
. From Equation (41), the test result in this case is obtained through twice decision. Firstly, use the sign detector
to determine the sign of each observation component
. Secondly, compute the proportion of the positive observation components in the observation vector and then compare it with the decision threshold
to obtain the final result.
Let , then the detector shown in Equation (41) can be substituted by two decision thresholds and , the corresponding decision function are and , respectively. When , the detector chooses only if and at the same time. When , the detector chooses if or . Assume be a discrete vector without any constraints. Then the detection and false-alarm probabilities of the sign detector choosing the noise modified observation component , , can be calculated by and , where , and . Further, the detection and false-alarm probabilities of for are computed as and , respectively. The detection and false-alarm probabilities of for can be expressed by and . Correspondingly, and , .
Let
and
. Under the two constraints that
and
, for any
, we can determine the six sets
,
, for
and
according to the definitions of the six sets and the values of
and
, respectively. Naturally, the six sets obtained by allowing the randomization between
and
can be determined by
,
. Afterwards, we can search the maximum
,
,
and the corresponding noise enhanced solutions according to the algorithm provided in
Section 3.
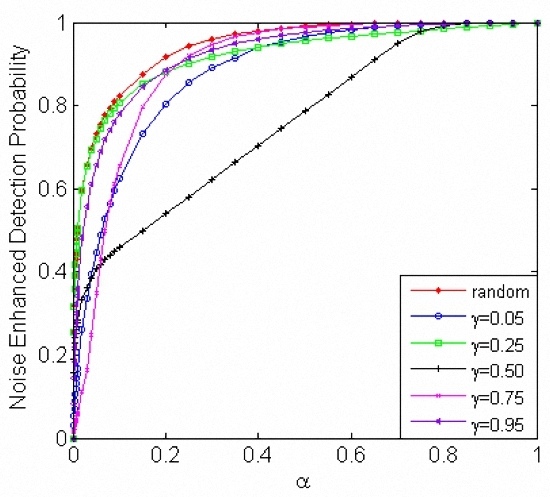
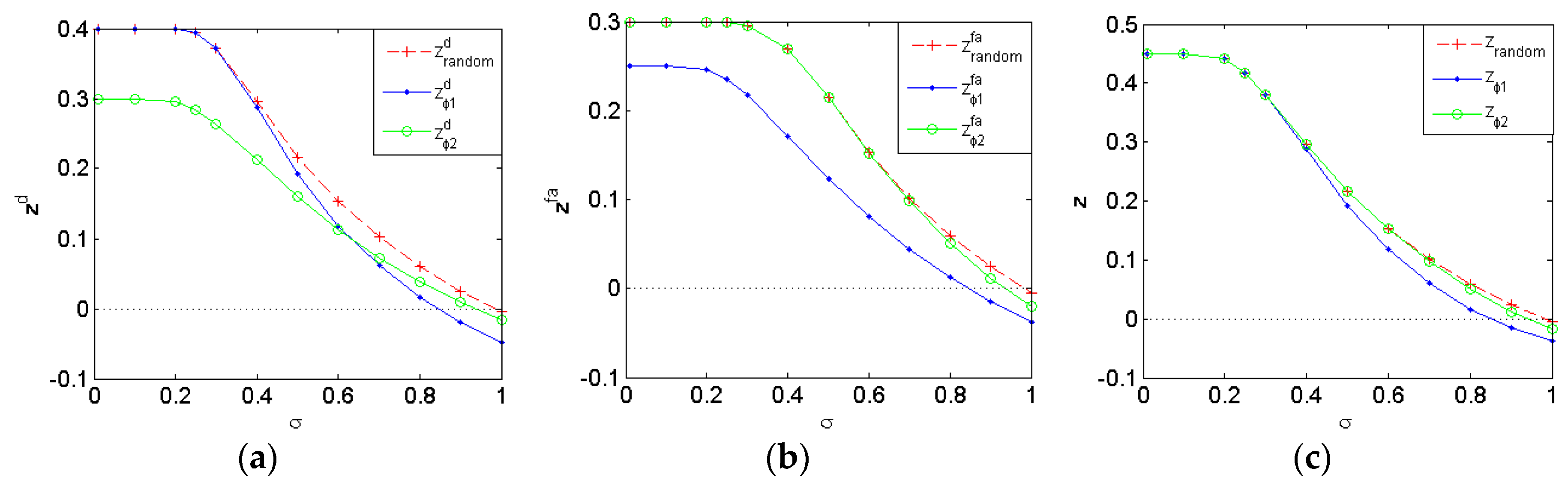
Figure 1 illustrates that the maximum achievable
,
and
for
,
and the case of allowing the randomization between
and
for different values of
when
and
. The
plotted in
Figure 1a is actually the relative improvement of the maximum achievable detection probability
compared to
under the constraint
,
i.e.,
. Hence,
and
can be realized only when
. As shown in
Figure 1a,
when
increases to a certain extent, which means the feasible range of
for the noise enhanced phenomenon is limited. When
is close to 0, the maximum achievable
for
is 0.3, which equals to that for the case of allowing the randomization between detectors, and the corresponding
is close to 1 while the maximum
for
can only reach 0.9. With the increase of
,
for
,
and the case of allowing the randomization between them gradually decrease. When,
the maximum achievable
for
is lower than that for the case of allowing the randomization between detectors. The maximum achievable
for
and
when
, and the maximum
for
is gradually greater than that for
when
. In particular, for the case where the randomization between detectors is allowed, the maximum achievable
decreases to 0 when
. Consequently, for
, the noise enhanced phenomenon, under the constraints
and
, can still happen through allowing the randomization between
and
, which is on account of the fusion of
and
,
, providing more available noise enhanced solutions.
The
depicted in
Figure 1b is actually the relative improvement of the minimum achievable false-alarm probability
compared to
under the constraint that
,
i.e.,
. Similarly, there exists noise enhanced solution to meet the two constraints
and
only if
. When
approaches to 0, the maximum
for
is equal to that for the case of allowing the randomization between
and
, the corresponding minimum
is close to 0 while the minimum
for
can only reach 0.1. From
Figure 1b, as
increases, the maximum achievable
for
,
and the case of allowing the randomization between them gradually decrease. The maximum achievable
for
and
are lower than zero when
, while
obtained in the case of allowing the randomization between
and
is still greater than zero for
. In other words, for
, compared to the nonrandomization case where the noise enhanced phenomenon cannot happen,
and
can still be realized by allowing the randomization between
and
.
From
Figure 1a,b, it is clear that under the constraints
and
, the maximum achievable
for
is greater than that for
and the minimum achievable
for
is smaller than that for
when
. In such case, we can choose
for a greater
or select
for a smaller
when the randomization between detectors cannot be allowed. As illustrated in
Figure 1c, the maximum
for
is equal to that for
. When
is close to 0, the maximum
for the case of allowing the randomization can reach
, which is greater than the corresponding maximum
and
. Obviously, there exists
to obtain the maximum
in the whole
. As
increases, the number of the elements in the set
decreases. When
,
, then the maximum
obtained in the case of allowing the randomization is equal to the maximum
or
according to Corollary 3,
i.e.,
.
As a comparison,
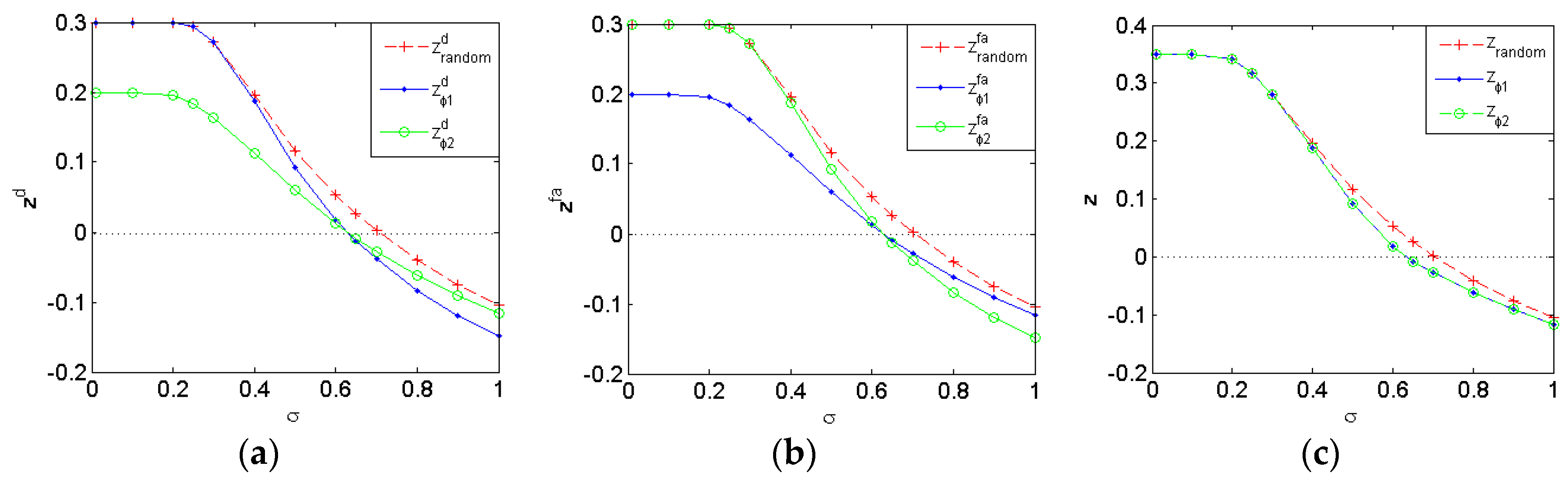
Figure 2 and
Figure 3 show the maximum achievable
,
and
for
,
and the case of allowing the randomization between them for different values of
when
,
and
,
, respectively. Compared
Figure 1a and
Figure 2a, both of them plot the
corresponding to the maximum
under the constraint
. So the
in the two figures indicate the same change trend. In
Figure 2b, the maximum
obtained for the case of allowing randomization between detectors equals to that for
when
. Compared to
Figure 1b, when
is close to 0, the minimum
in
Figure 2b for
still maintains zero, while the minimum
for
decreases from 0.1 to 0.05 as the corresponding
increases from 0.2 to 0.25. Further, compared the minimum
for
when
and
, they are equal when
and then the latter one is gradually greater than the former one as
increases, which is consistent with the description as shown in
Figure 1b and
Figure 2b. From the definition of
,
i.e.,
, with the decrease of
, the value of
increases and some
may change from negative to positive. In other words, the decrease of
changes the distribution of the detector and discrete pair
in
. For any
, some
belonged to
for
are reallocated to the set
or
when
decreases to 0.6. In addition, some
when
may belong to
or
when
. Further, these new elements in
can be utilized to construct more available noise enhanced solutions to obtain a superior false-alarm probability. However, we need to note that behind the improvement of
is the decrease of the corresponding
.
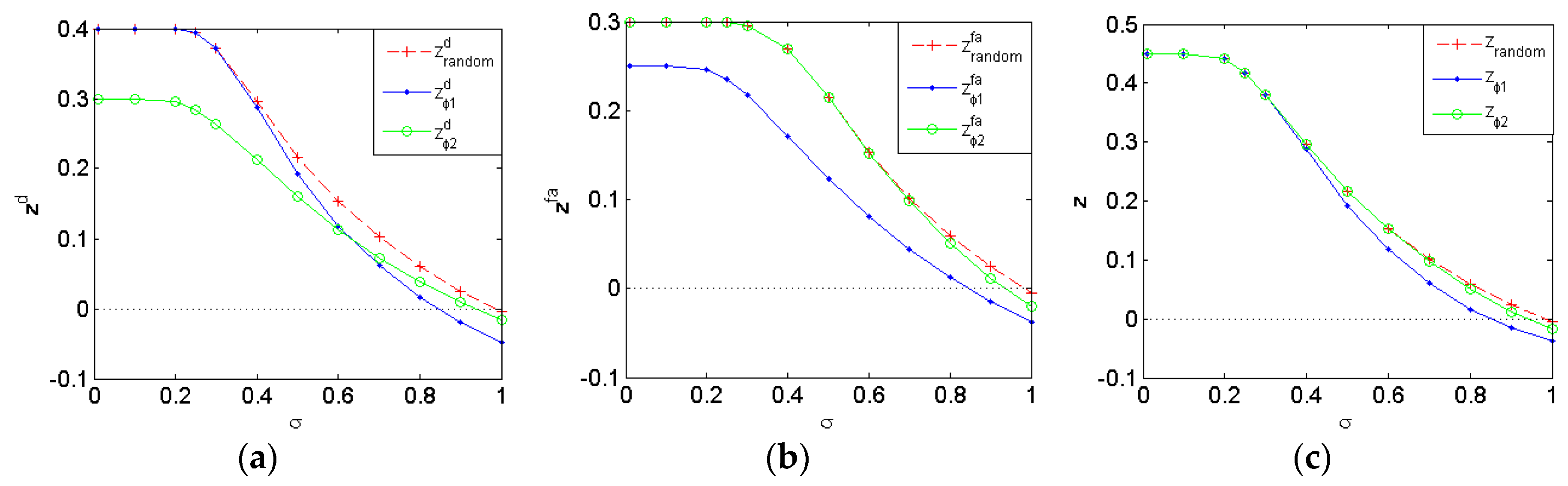
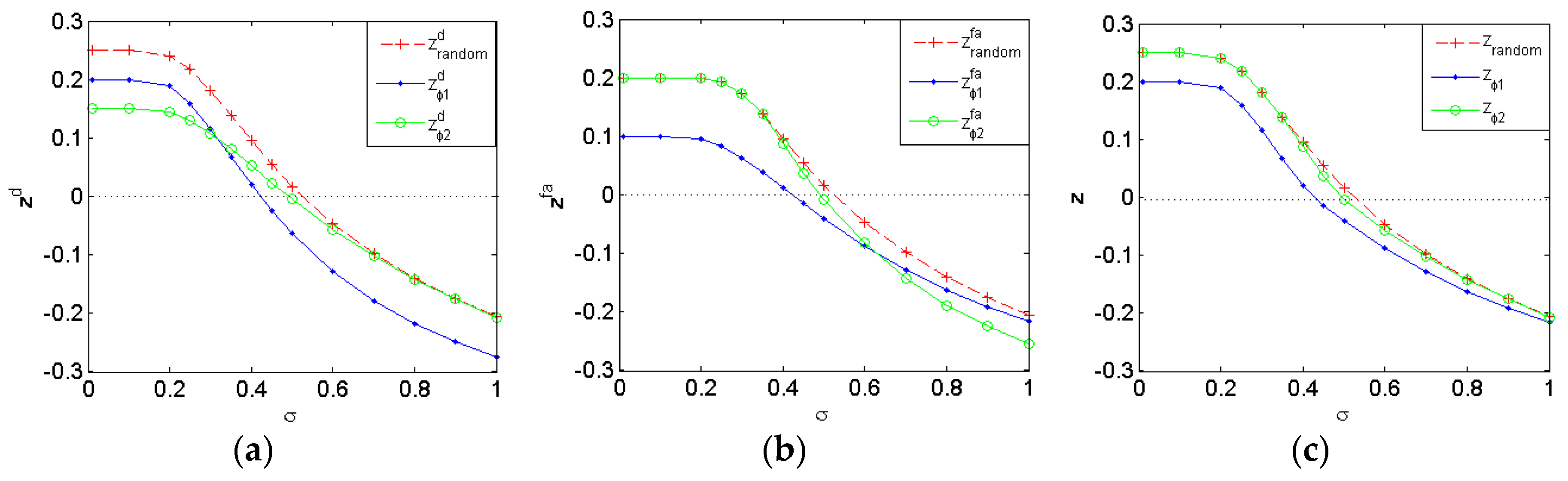
Compared
Figure 3 and
Figure 1, as
decreases from 0.3 to 0.2, some
will change from positive to negative,
i.e., the distribution of
changes. Consequently, for any
, there may be some
change to
and
,
change to
, or
change to
. As shown in
Figure 3a, when
closes to 0, the maximum available
for
,
and the case of allowing the randomization between them are 0.2, 0.15 and 0.25, and the corresponding maximum
can reach 0.9, 0.85 and 0.95, respectively. As
increases, the maximum
for
,
and the case of allowing the randomization decrease, where the maximum
decreases fastest for
and slowest for
. Further, the maximum achievable
for
is greater than that for
when
and the difference between the maximum
for
and the case of allowing the randomization are smaller and smaller with the increase of
. Compared
Figure 3b and
Figure 1b, both of them plot the
corresponding to the minimum
under the constraint
. Especially,
for any
,
i.e.,
according to Corollary 3. In addition, compared with
Figure 1, under the two constraints that
and
, the feasible ranges of
for
,
and the case of allowing the randomization between them become smaller.
In conclusion, as
decreases, the values of
,
and
increase. This is mainly on account of the noise enhanced phenomenon generally occurs when the observation has multimodal pdf and the multimodal structure is more obvious for a smaller
[
21]. In order to investigate the simulation results of
Figure 1,
Figure 2 and
Figure 3 further,
Table 1,
Table 2 and
Table 3 present the optimal noise enhanced solutions to maximize
,
and
for
,
and the case of allowing the randomization, respectively, for different
when
and
.
It is worthy to note that the optimal noise enhanced solutions to maximize
,
and
, respectively, are not unique in many cases. Moreover, due to the property of the detector, the noise modified detectability for
,
, obtained by adding
is the same with that achieved via adding
. As a demonstration, for each
, there only lists one noise enhanced solution for the maximum
, as well as the maximum
and
. As shown in
Table 1,
Table 2 and
Table 3, the optimal noise enhanced solutions to maximize
,
and
, respectively, are the randomization of at most two detector and discrete vector pairs
and
from two different sets, which are consistent with Theorems 1–3.
Next, the noise enhanced solution for is taken as an example to illustrate firstly. When , the maximum obtained by is equal to the maximum obtained by .Through some calculations, is one of the discrete vectors to maximize , so is the optimal noise to maximize for when and . At the same time, the obtained by is also the maximum for , thus is the optimal noise to maximize for . Besides, the maximum obtained from and are smaller than the maximum for , then the maximum under the two constraints and is obtained by the randomization of from and from with probabilities 0.4 and 0.6, respectively. The case of is similar with the case of .
When
, both
and
are null, and the maximum
,
and
for
cannot be obtained by the discrete vector from
. Based on Theorems 1–3, the maximum
,
and
can be achieved by the randomization of two detector and discrete vector pairs from
and
. Further, the noise enhanced solutions for the maximum
and
have the same additive noise components,
i.e.,
and
, but with different probabilities. Moreover, according to Corollary 3(b),
. When the randomization between
and
is allowed, the
obtained by
is equal to the
obtained by
, and it is the maximum
obtained in
. According to Corollary 3(c), the maximum
,
and
can be obtained by the randomization of
and
with different probabilities. Especially, the probability
of
for the maximum
or
is unique, while the probability
of
for the maximum
can be chosen in a certain interval. When
, no noise enhanced solution exists to meet the two constraints for the nonrandomization case in
Table 1 and
Table 2, while there still exist noise enhanced solutions to improve the detectability under the same constraints by allowing randomization between
and
shown in
Table 3 and the corresponding solutions are also obtained according to Corollary 3(c).
In order to discuss the effect of the decision threshold
on the detection and false-alarm probabilities, the proposed noise enhanced method is operated on different values of
. Further, the relationships between the maximum achievable detection probability and
, the minimum achievable false-alarm probability and
are explored for different
. The different results of the original detector and the noise enhanced detector for different
are given in
Figure 4,
Figure 5 and
Figure 6.
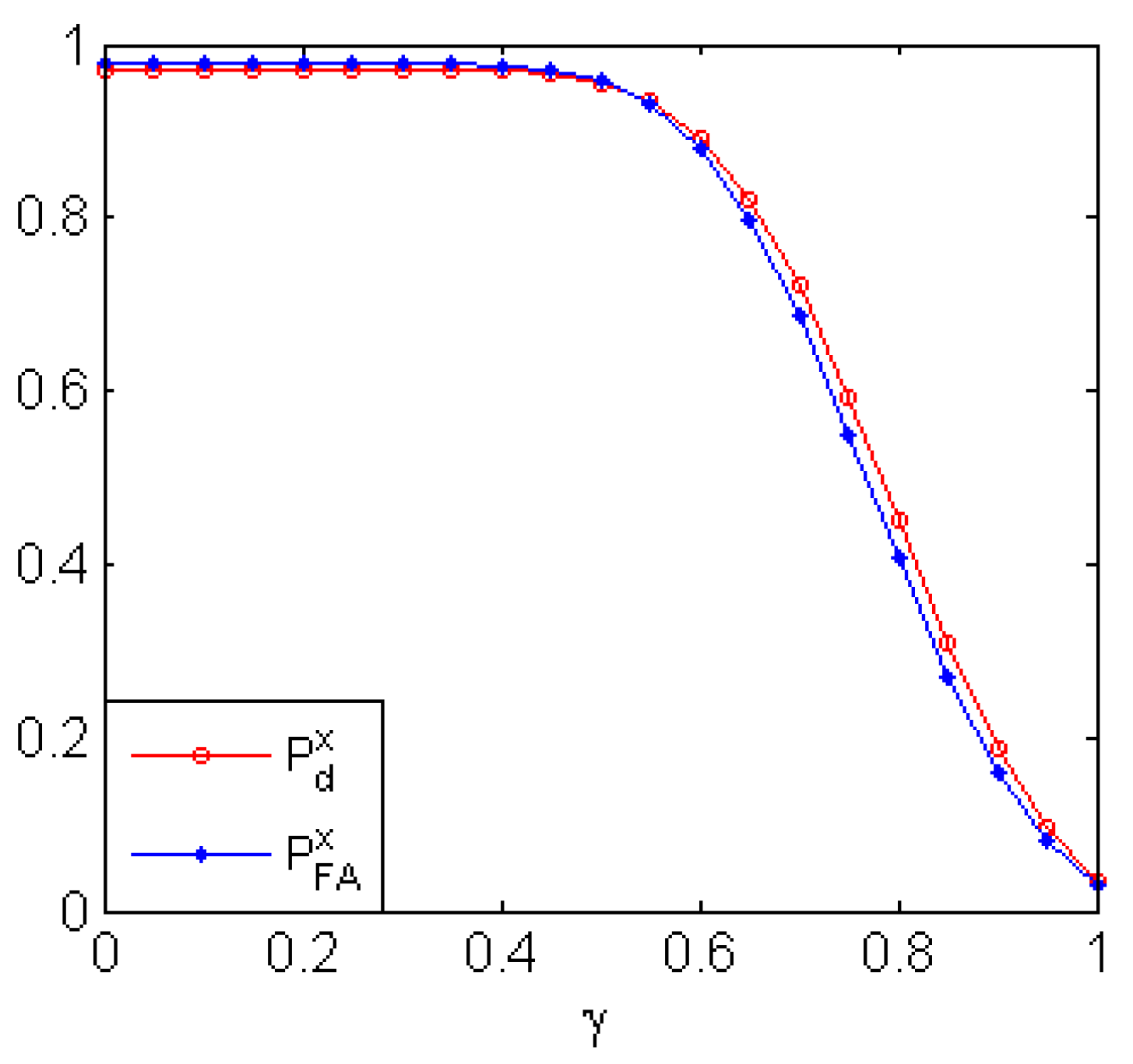
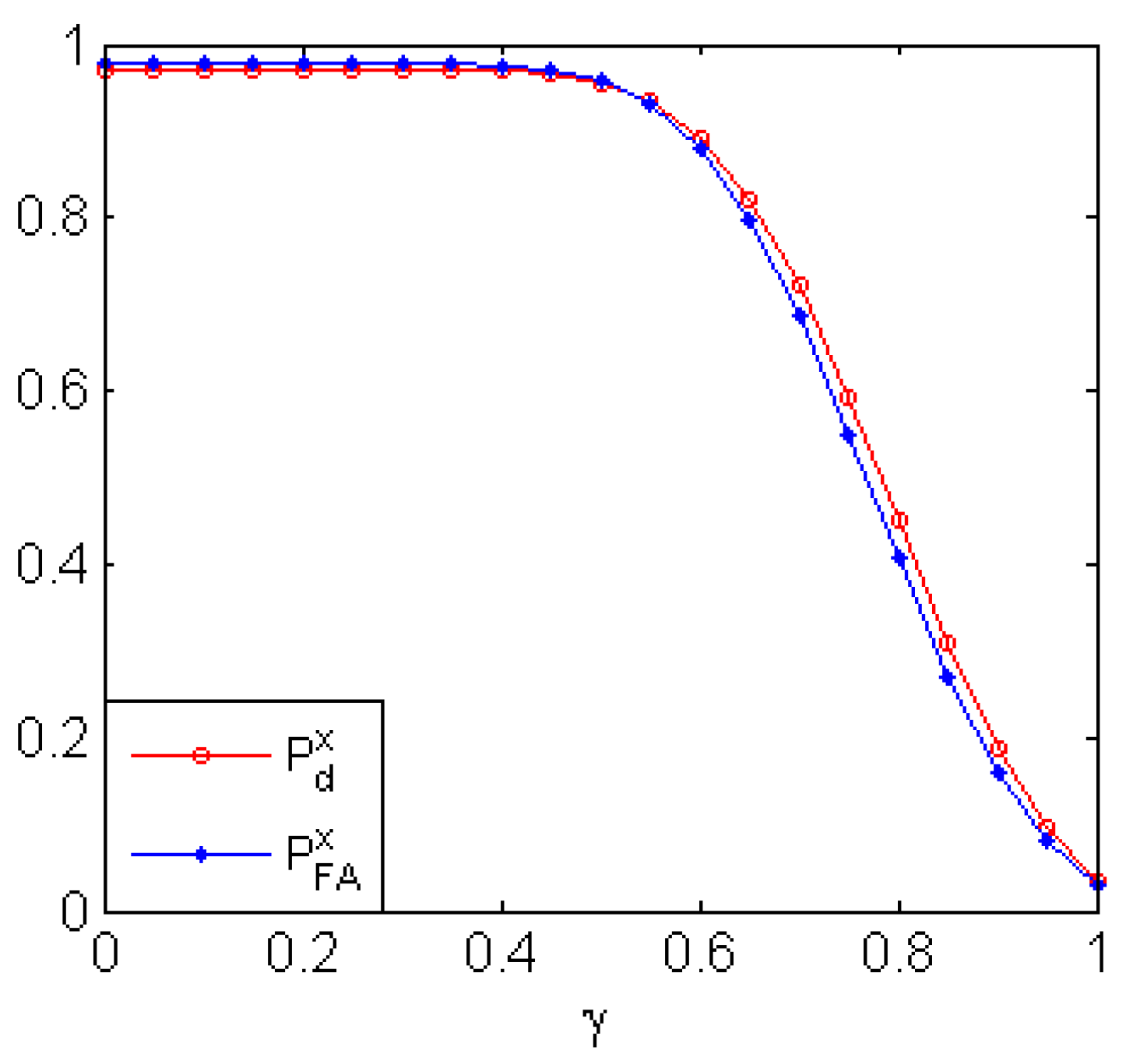
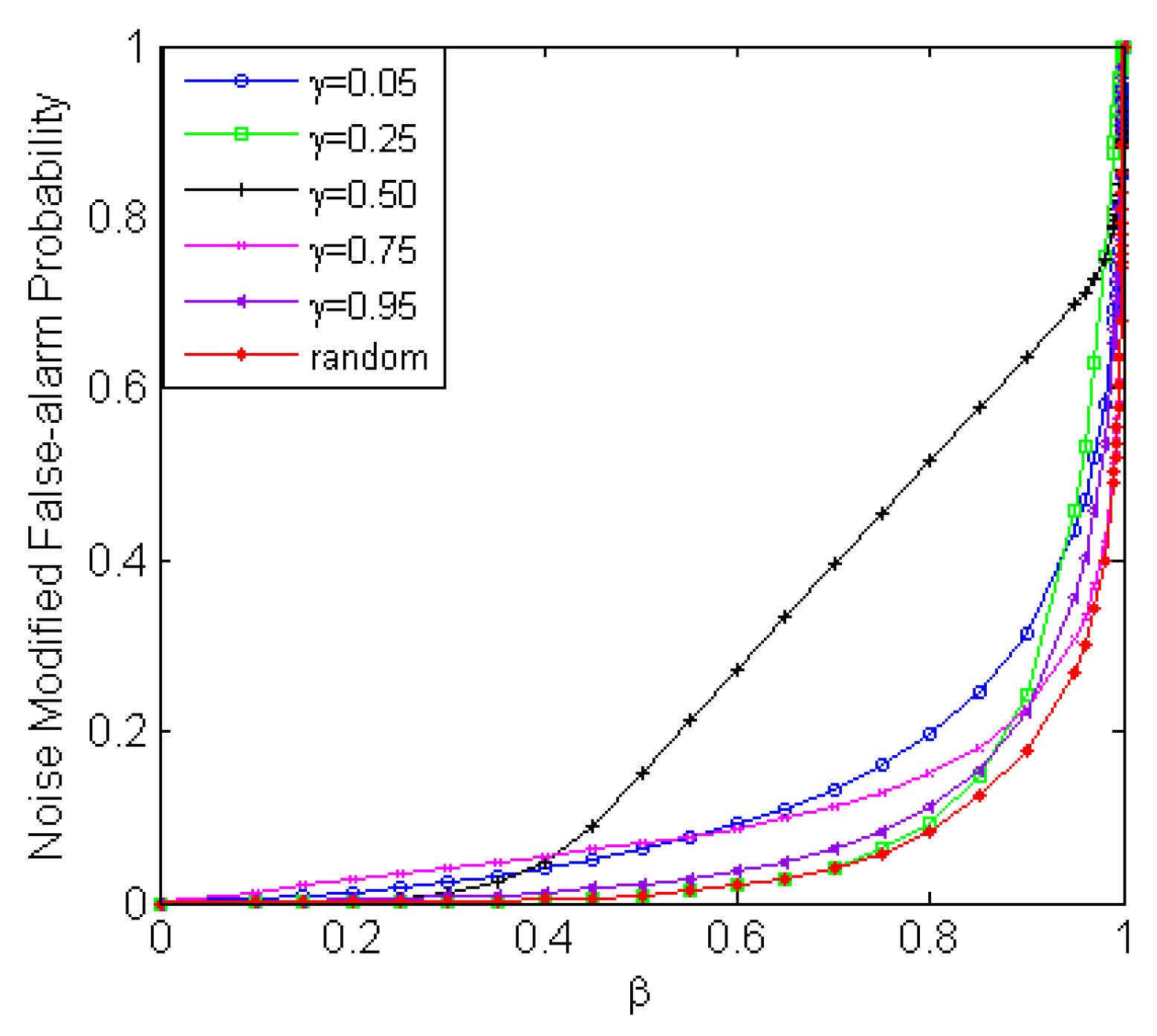
Figure 4 gives the original detection and false-alarm probabilities for different
when
. From
Figure 4, we can see that both the original detection and false-alarm probabilities decrease with the increase of
and the value of the original detection probability is close to that of the original false-alarm probability for any
. In other words, a better detection probability is obtained for a smaller
and a lower false-alarm probability is achieved for a greater
.
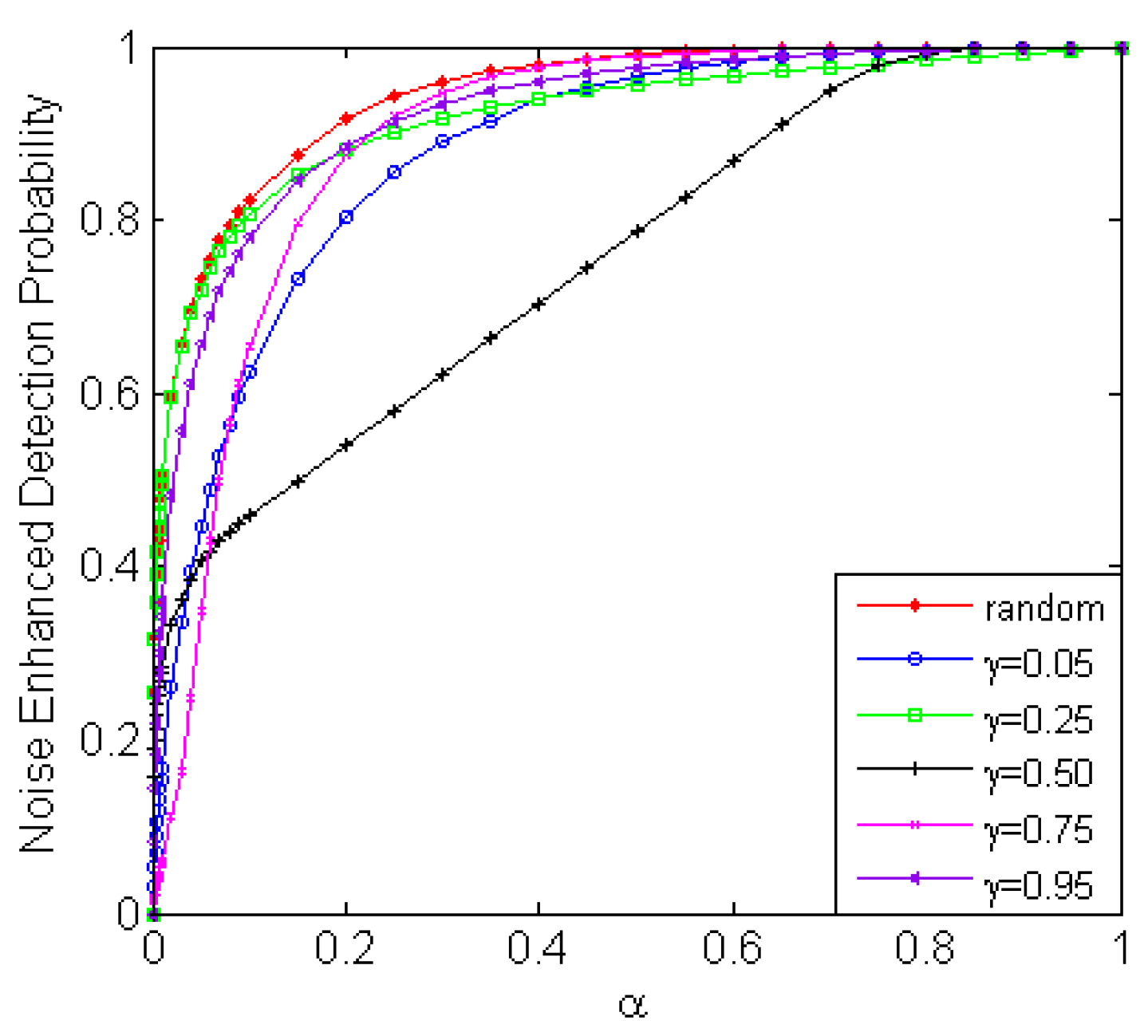
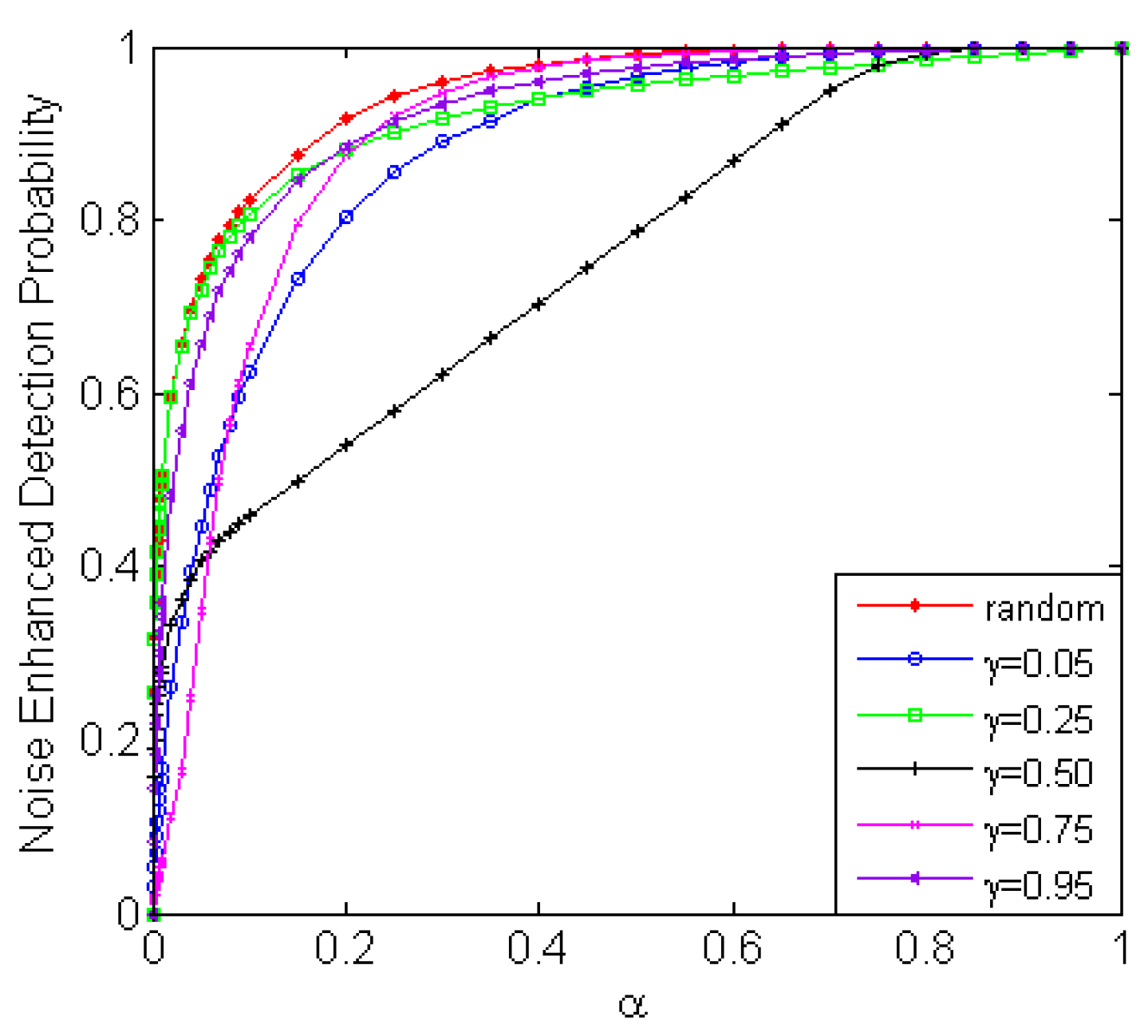
Figure 5 plots the maximum achievable
obtained by adding noise as a function of
for
and
, and the case of allowing the randomization between thresholds, when
,
,
and
. Compared
Figure 5 with
Figure 4, the detection probabilities for
and 0.75 can be increased significantly by adding suitable additive noises with a lower false-alarm probability.
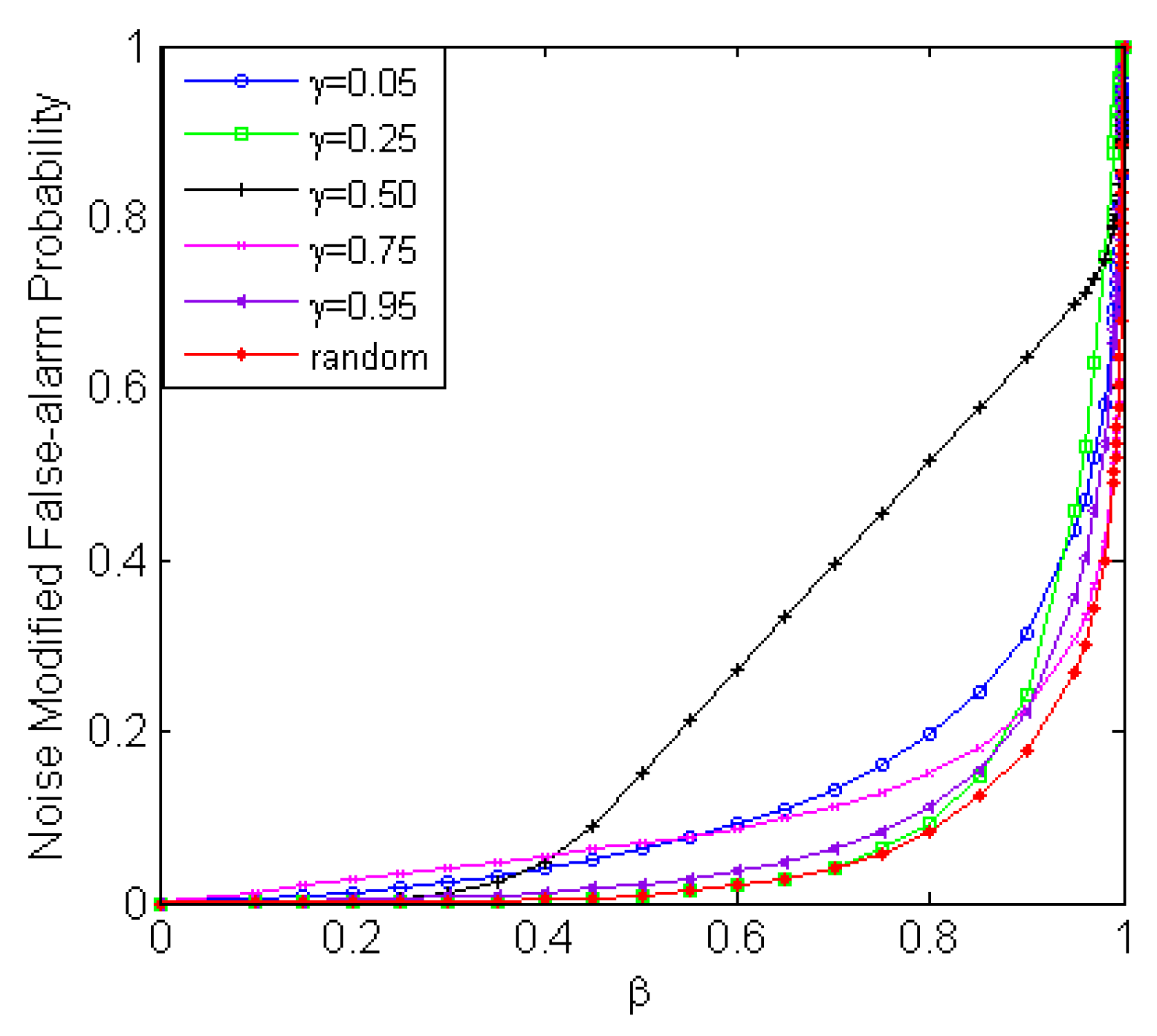
Figure 6 presents the minimum achievable
obtained by adding noise as a function of
for
and
, and the case of allowing the randomization between thresholds, when
,
,
and
. Comparing
Figure 6 with
Figure 4, the false-alarm probabilities for
, 0.25 and 0. 5 can be decreased significantly by adding suitable additive noises with a higher detection probability. From
Figure 5 and
Figure 6, different detection performance can be realized by adding noise. As shown in
Figure 5 and
Figure 6, for the cases of
and
, the detector of
shows the worst performance compared to others. Thus, in such cases,
is not a suitable threshold. From
Figure 5 and
Figure 6, different detection performance can be realized by adding noises. Namely, various noise enhanced solutions can be provided with our method to satisfy different performance requirements. As a result, for any decision threshold
, we can determine whether the performance of the detector can be improved or not, and search a noise enhanced solution to realize the improvement according to the method proposed in this paper.
It is worthy to note that there is no limit on the detector in the method proposed in this manuscript. Furthermore, it only depends on detector itself whether the detection performance of the detector can or cannot be improved by adding noise. The algorithms proposed in this paper not only provide ways to prove the improvability or nonimprovability, but also analyze how to search the optimal noise enhanced solutions. For any detector, no matter an optimal Neyman–Pearson (Bayesian, Minimax) detector or other suboptimal detector, we first calculate all information of
obtained by every detector and discrete vector pair
. Then, we divide each pair
into six sets according to the values of
and
, where
and
. If there exist detector and discrete vector pairs to satisfy the sufficient conditions as given in
Section 3.4, noise enhanced solutions to maximize
,
and
can be obtained according to
Section 3.1,
Section 3.2, and
Section 3.3, respectively, on the premise that
and
. Otherwise, no noise enhanced solution exists to satisfy
and
simultaneously.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}