Robotic and Sensor Technologies in Environmental Exploration and Monitoring
A topical collection in Sensors (ISSN 1424-8220). This collection belongs to the section "Physical Sensors".
Viewed by 87062
Share This Topical Collection
Editors
 Dr. Jacopo Aguzzi
Dr. Jacopo Aguzzi
Dr. Jacopo Aguzzi
E-Mail
Website
Collection Editor
1. Instituto de Cièncias del Mar (ICM-CSIC), Renewable Marine Resources ("Functioning and Vulnerability of Marine Ecosystems" Group), I E-08003 Barcelona, Spain
2. Stazione Zoologica Anton Dohrn, 80122 Naples, Italy
Interests: ecological monitoring; biological indicators; fisheries; cabled video-observatories; autonomous robotic platforms
Special Issues, Collections and Topics in MDPI journals
 Dr. Corrado Costa
Dr. Corrado Costa
Dr. Corrado Costa
E-Mail
Website
Collection Editor
Council for Agricultural Research and Analysis of the Agrarian Economy (CREA), Research Center for Engineering and Food Processing, 00015 Rome, Italy
Interests: multivariate modelling; open source; logistics; traceability; hyperspectral imaging; RGB imaging; IoT; digital agriculture
 Dr. Valerio Funari
Dr. Valerio Funari
Dr. Valerio Funari
E-Mail
Website
Collection Editor
Institute of Marine Sciences-National Research Council ISMAR-CNR, Via P. Gobetti 101, 40129 Bologna, Italy
Interests: geochemistry to waste management; analytical chemistry; mineralogy; marine geology; bio-hydrometallurgy; environmental magnetism
Topical Collection Information
Dear Colleagues,
The aim of this Topical Collection is to create a highly transdisciplinary discussion forum among scientists and engineers on robotic and sensor technologies for the autonomous exploration, environmental monitoring, and in situ manipulation of terrestrial and marine ecosystems. Applications can be presented in relation to different platform designs (including the biomimicking ones), energy systems (e.g., fuel cells), and navigation and data collection procedures (including storage, transmission, communication, and virtual-control interfaces). Fields of relevance can be the surveillance of maritime industrial activities, precision agriculture developments, exploration and assessment of marine and terrestrial georesources, exo-oceans exploration (e.g., for Enceladus or Europa), and the spatiotemporally intensive measurements of ecosystems and their biodiversity or services (e.g., in situ biological sampling and fishery-independent stock assessment). Technologies for marine litter and microplastics quantification and removal are also welcome. New sensor technologies or innovative applications of already existing ones (e.g., LiDAR, multispectral, and optoacoustic imaging) are welcome. Special preference will be given to new ecogenomic sensor applications
Dr. Jacopo Aguzzi
Dr. Corrado Costa
Dr. Sergio Stefanni
Dr. Valerio Funari
Collection Editors
Manuscript Submission Information
Manuscripts should be submitted online at www.mdpi.com by registering and logging in to this website. Once you are registered, click here to go to the submission form. All submissions that pass pre-check are peer-reviewed. Accepted papers will be published continuously in the journal (as soon as accepted) and will be listed together on the collection website. Research articles, review articles as well as short communications are invited. For planned papers, a title and short abstract (about 250 words) can be sent to the Editorial Office for assessment.
Submitted manuscripts should not have been published previously, nor be under consideration for publication elsewhere (except conference proceedings papers). All manuscripts are thoroughly refereed through a single-blind peer-review process. A guide for authors and other relevant information for submission of manuscripts is available on the Instructions for Authors page. Sensors is an international peer-reviewed open access semimonthly journal published by MDPI.
Please visit the Instructions for Authors page before submitting a manuscript.
The Article Processing Charge (APC) for publication in this open access journal is 2600 CHF (Swiss Francs).
Submitted papers should be well formatted and use good English. Authors may use MDPI's
English editing service prior to publication or during author revisions.
Published Papers (12 papers)
Open AccessArticle
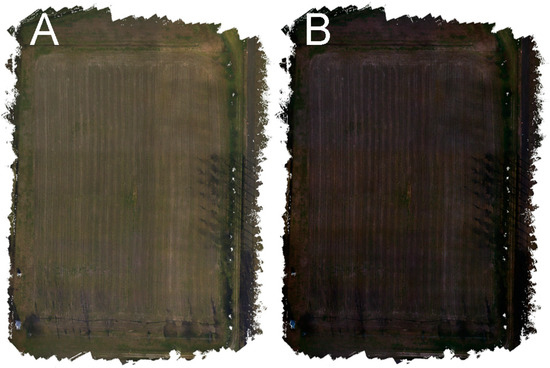
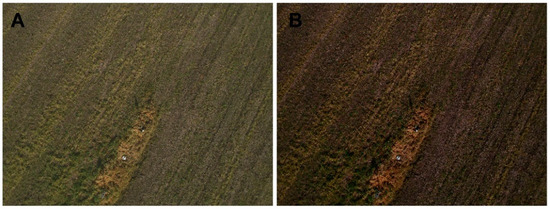
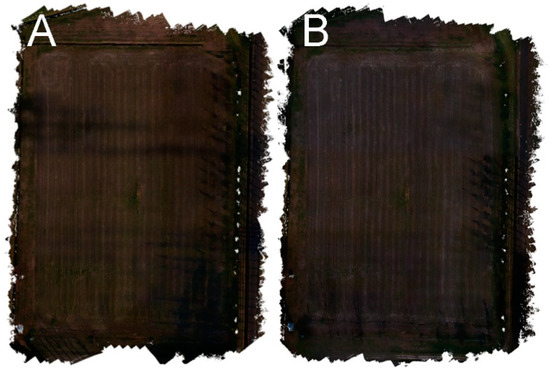
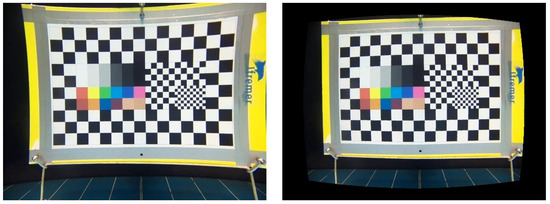
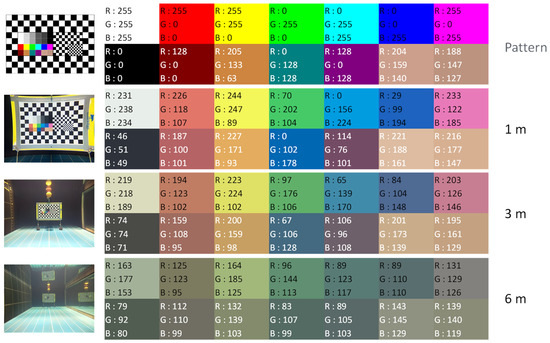
Advantages in Using Colour Calibration for Orthophoto Reconstruction
by
Francesco Tocci, Simone Figorilli, Simone Vasta, Simona Violino, Federico Pallottino, Luciano Ortenzi and Corrado Costa
Cited by 10 | Viewed by 2373
Abstract
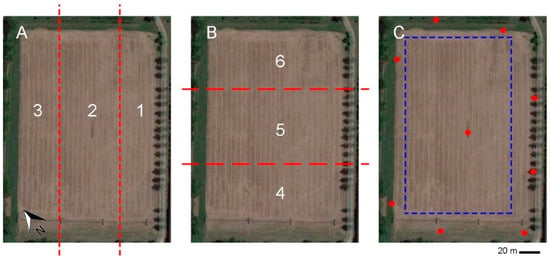
UAVs are sensor platforms increasingly used in precision agriculture, especially for crop and environmental monitoring using photogrammetry. In this work, light drone flights were performed on three consecutive days (with different weather conditions) on an experimental agricultural field to evaluate the photogrammetric performances
[...] Read more.
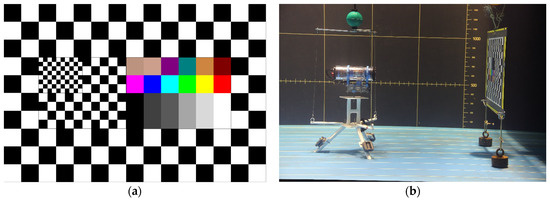
UAVs are sensor platforms increasingly used in precision agriculture, especially for crop and environmental monitoring using photogrammetry. In this work, light drone flights were performed on three consecutive days (with different weather conditions) on an experimental agricultural field to evaluate the photogrammetric performances due to colour calibration. Thirty random reconstructions from the three days and six different areas of the field were performed. The results showed that calibrated orthophotos appeared greener and brighter than the uncalibrated ones, better representing the actual colours of the scene. Parameter reporting errors were always lower in the calibrated reconstructions and the other quantitative parameters were always lower in the non-calibrated ones, in particular, significant differences were observed in the percentage of camera stations on the total number of images and the reprojection error. The results obtained showed that it is possible to obtain better orthophotos, by means of a calibration algorithm, to rectify the atmospheric conditions that affect the image obtained. This proposed colour calibration protocol could be useful when integrated into robotic platforms and sensors for the exploration and monitoring of different environments.
Full article
►▼
Show Figures
Open AccessArticle
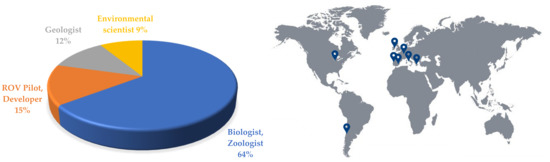
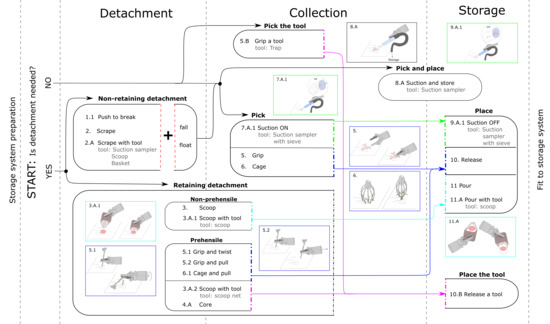
Marine Robotics for Deep-Sea Specimen Collection: A Taxonomy of Underwater Manipulative Actions
by
Angela Mazzeo, Jacopo Aguzzi, Marcello Calisti, Simonepietro Canese, Michela Angiolillo, A. Louise Allcock, Fabrizio Vecchi, Sergio Stefanni and Marco Controzzi
Cited by 11 | Viewed by 6099
Abstract
In order to develop a gripping system or control strategy that improves scientific sampling procedures, knowledge of the process and the consequent definition of requirements is fundamental. Nevertheless, factors influencing sampling procedures have not been extensively described, and selected strategies mostly depend on
[...] Read more.
In order to develop a gripping system or control strategy that improves scientific sampling procedures, knowledge of the process and the consequent definition of requirements is fundamental. Nevertheless, factors influencing sampling procedures have not been extensively described, and selected strategies mostly depend on pilots’ and researchers’ experience. We interviewed 17 researchers and remotely operated vehicle (ROV) technical operators, through a formal questionnaire or in-person interviews, to collect evidence of sampling procedures based on their direct field experience. We methodologically analyzed sampling procedures to extract single basic actions (called atomic manipulations). Available equipment, environment and species-specific features strongly influenced the manipulative choices. We identified a list of functional and technical requirements for the development of novel end-effectors for marine sampling. Our results indicate that the unstructured and highly variable deep-sea environment requires a versatile system, capable of robust interactions with hard surfaces such as pushing or scraping, precise tuning of gripping force for tasks such as pulling delicate organisms away from hard and soft substrates, and rigid holding, as well as a mechanism for rapidly switching among external tools.
Full article
►▼
Show Figures
Open AccessSystematic Review
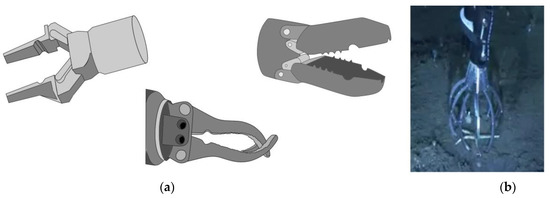
Marine Robotics for Deep-Sea Specimen Collection: A Systematic Review of Underwater Grippers
by
Angela Mazzeo, Jacopo Aguzzi, Marcello Calisti, Simonepietro Canese, Fabrizio Vecchi, Sergio Stefanni and Marco Controzzi
Cited by 59 | Viewed by 11788
Abstract
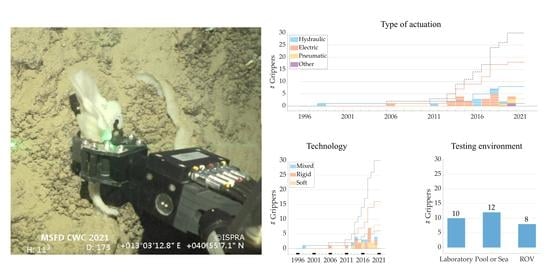
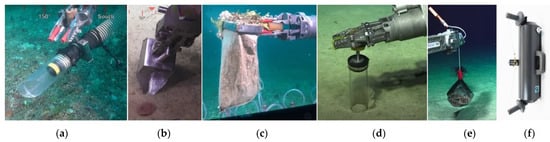
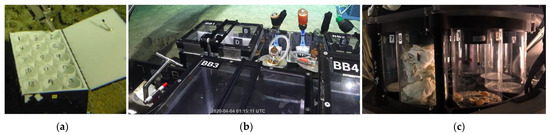
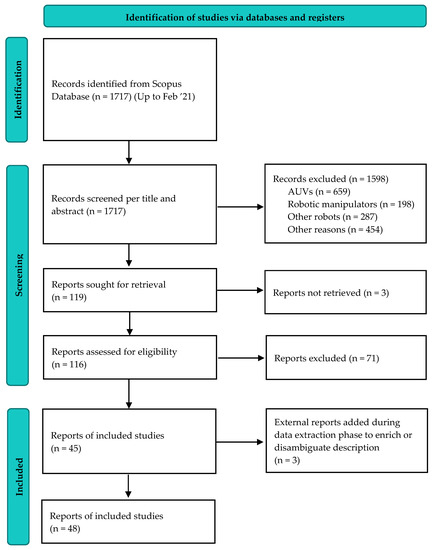
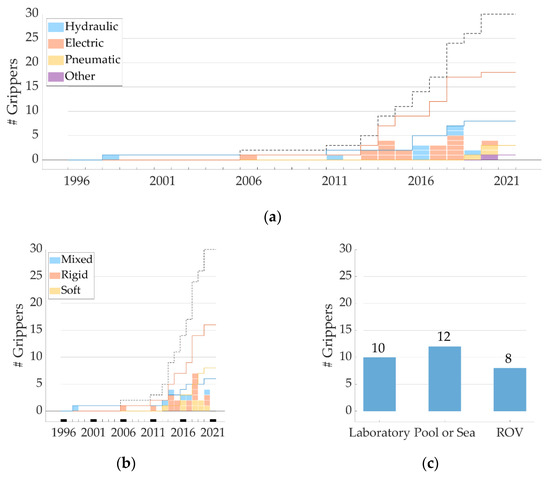
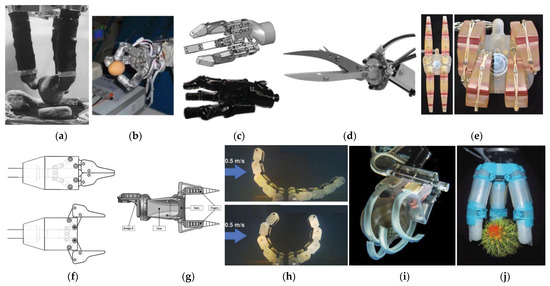
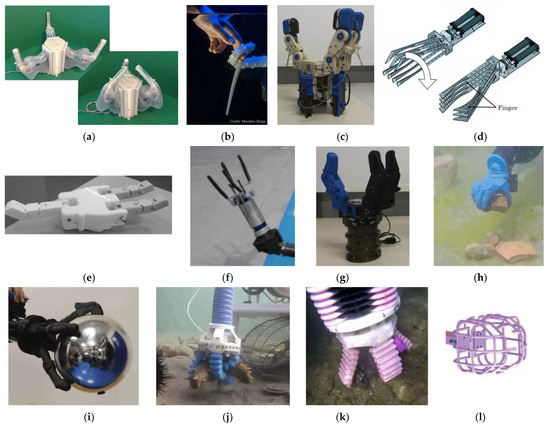
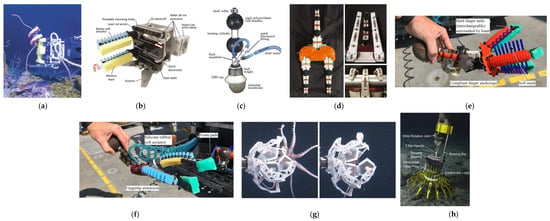
The collection of delicate deep-sea specimens of biological interest with remotely operated vehicle (ROV) industrial grippers and tools is a long and expensive procedure. Industrial grippers were originally designed for heavy manipulation tasks, while sampling specimens requires dexterity and precision. We describe the
[...] Read more.
The collection of delicate deep-sea specimens of biological interest with remotely operated vehicle (ROV) industrial grippers and tools is a long and expensive procedure. Industrial grippers were originally designed for heavy manipulation tasks, while sampling specimens requires dexterity and precision. We describe the grippers and tools commonly used in underwater sampling for scientific purposes, systematically review the state of the art of research in underwater gripping technologies, and identify design trends. We discuss the possibility of executing typical manipulations of sampling procedures with commonly used grippers and research prototypes. Our results indicate that commonly used grippers ensure that the basic actions either of gripping or caging are possible, and their functionality is extended by holding proper tools. Moreover, the approach of the research status seems to have changed its focus in recent years: from the demonstration of the validity of a specific technology (actuation, transmission, sensing) for marine applications, to the solution of specific needs of underwater manipulation. Finally, we summarize the environmental and operational requirements that should be considered in the design of an underwater gripper.
Full article
►▼
Show Figures
Open AccessArticle
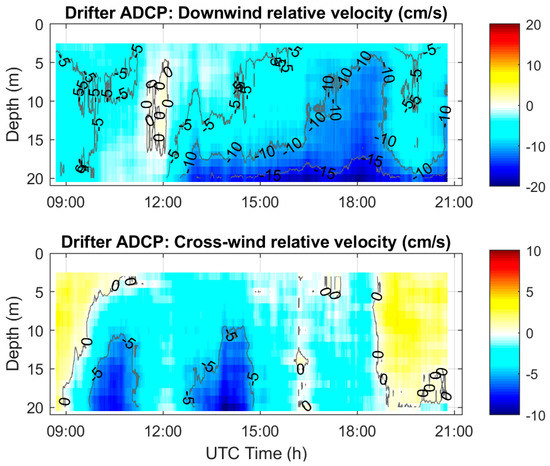
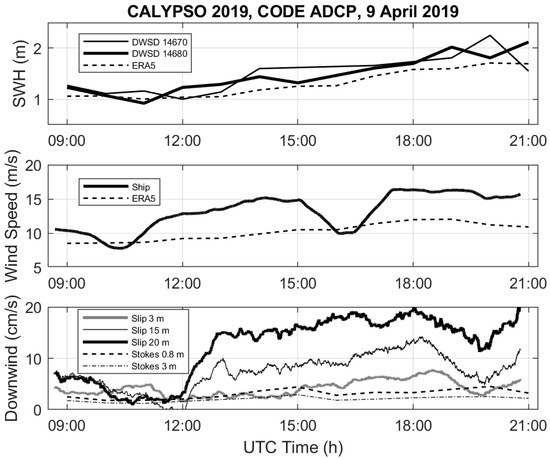
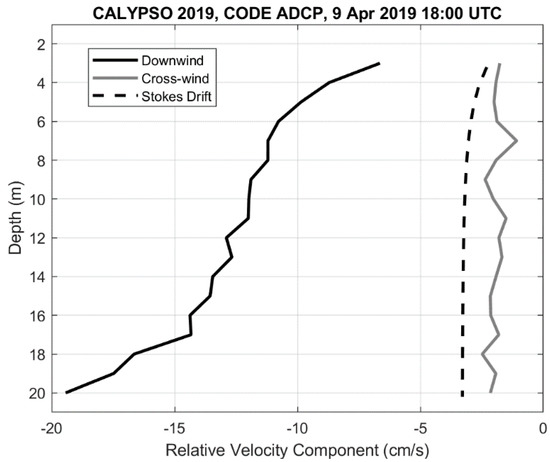
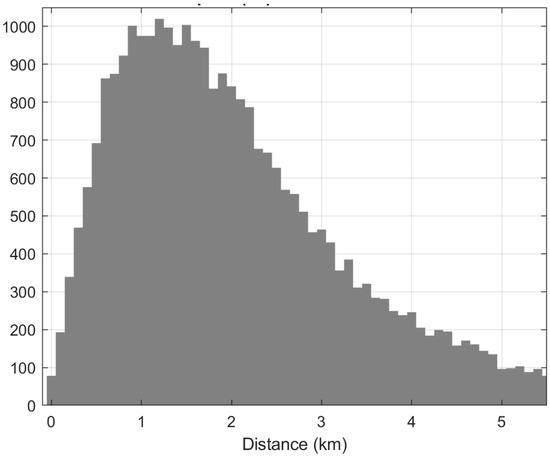
Comparing the Currents Measured by CARTHE, CODE and SVP Drifters as a Function of Wind and Wave Conditions in the Southwestern Mediterranean Sea
by
Pierre-Marie Poulain, Luca Centurioni and Tamay Özgökmen
Cited by 19 | Viewed by 3949
Abstract
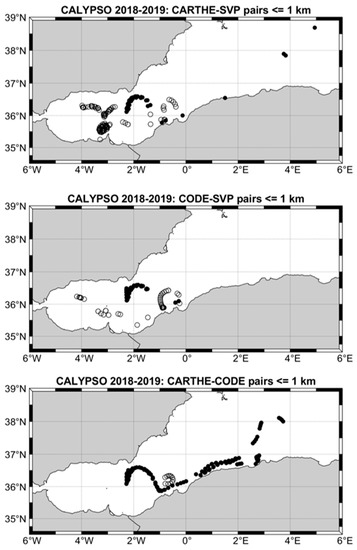
Instruments drifting at the ocean surface are quasi-Lagrangian, that is, they do not follow exactly the near-surface ocean currents. The currents measured by three commonly-used drifters (CARTHE, CODE and SVP) are compared in a wide range of sea state conditions (winds up to
[...] Read more.
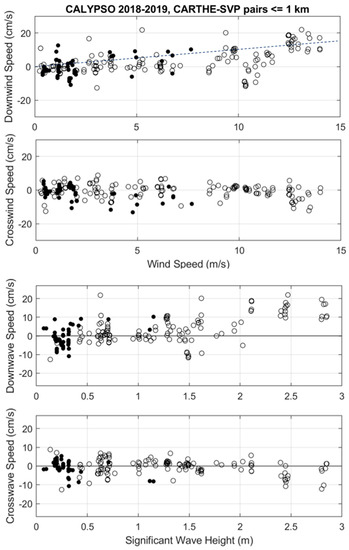
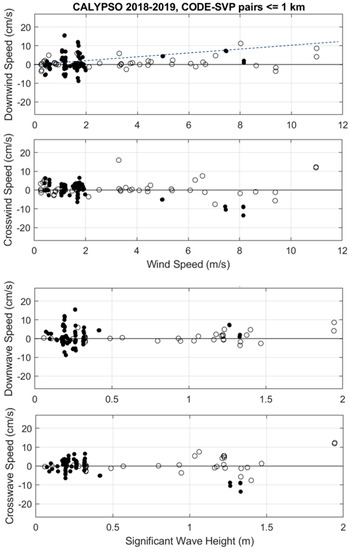
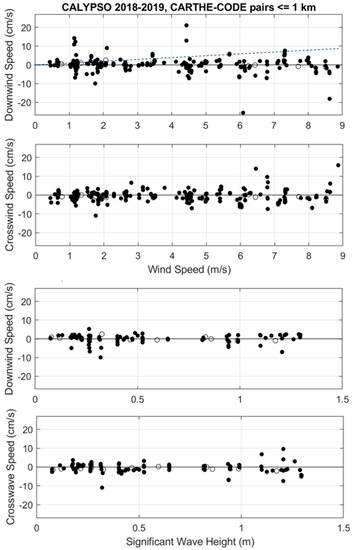
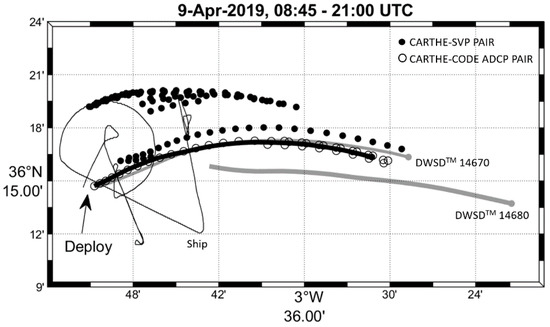
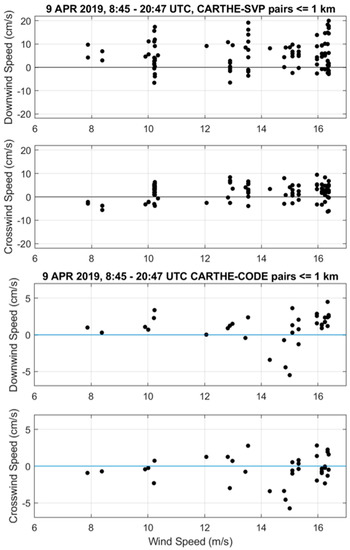
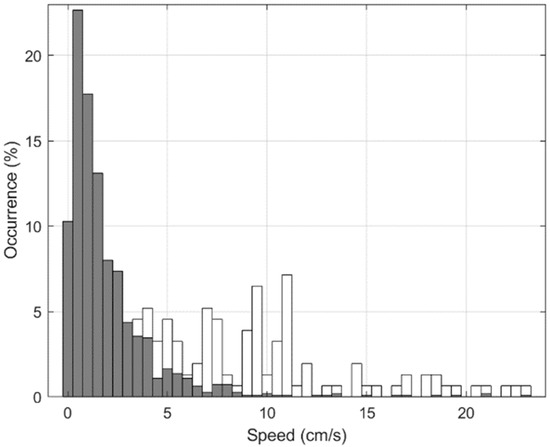
Instruments drifting at the ocean surface are quasi-Lagrangian, that is, they do not follow exactly the near-surface ocean currents. The currents measured by three commonly-used drifters (CARTHE, CODE and SVP) are compared in a wide range of sea state conditions (winds up to 17 m/s and significant wave height up to 3 m). Nearly collocated and simultaneous drifter measurements in the southwestern Mediterranean reveal that the CARTHE and CODE drifters measure the currents in the first meter below the surface in approximately the same way. When compared to SVP drogued at 15 m nominal depth, the CODE and CARTHE currents are essentially downwind (and down-wave), with a typical speed of 0.5–1% of the wind speed. However, there is a large scatter in velocity differences between CODE/CARTHE and SVP for all wind and sea state conditions encountered, principally due to vertical and horizontal shears not related to the wind. For the CODE drifter with wind speed larger than 10 m/s and significant wave height larger than 1 m, about 30–40% of this difference can be explained by Stokes drift.
Full article
►▼
Show Figures
Open AccessArticle
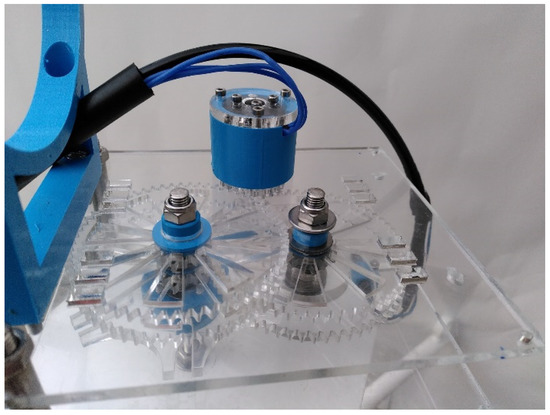
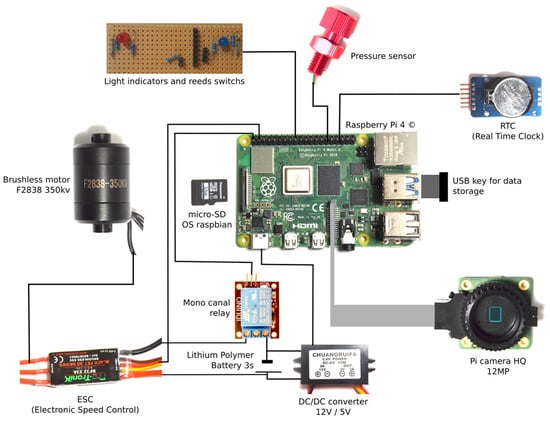
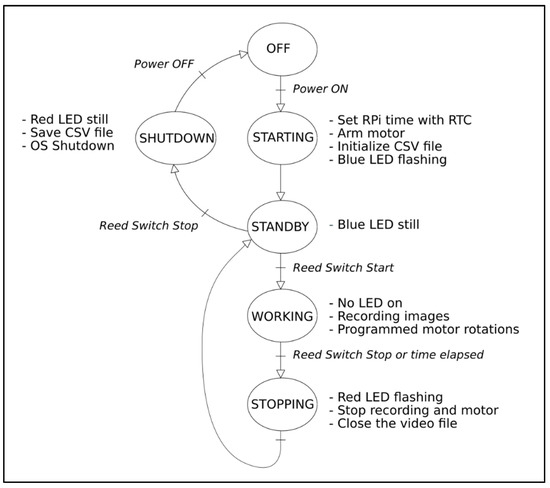
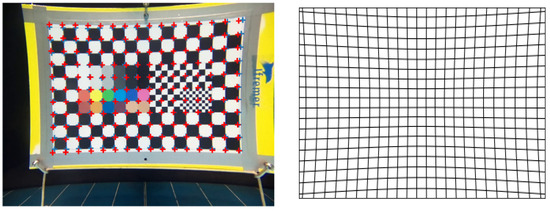
KOSMOS: An Open Source Underwater Video Lander for Monitoring Coastal Fishes and Habitats
by
Dominique Pelletier, Justin Rouxel, Olivier Fauvarque, David Hanon, Jean-Paul Gestalin, Morgann Lebot, Paul Dreano, Enora Furet, Morgan Tardivel, Yvan Le Bras, Coline Royaux and Guillaume Leguen
Cited by 8 | Viewed by 6955
Abstract
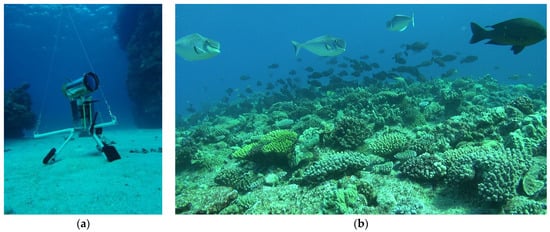
Background: Monitoring the ecological status of coastal ecosystems is essential to track the consequences of anthropogenic pressures and assess conservation actions. Monitoring requires periodic measurements collected in situ, replicated over large areas and able to capture their spatial distribution over time. This means
[...] Read more.
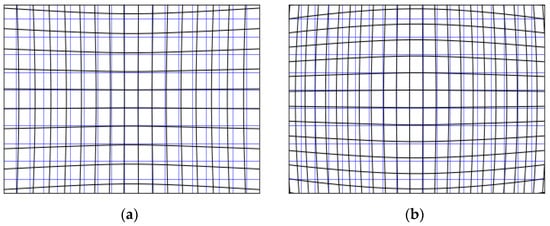
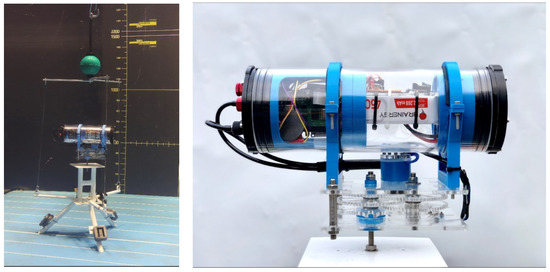
Background: Monitoring the ecological status of coastal ecosystems is essential to track the consequences of anthropogenic pressures and assess conservation actions. Monitoring requires periodic measurements collected in situ, replicated over large areas and able to capture their spatial distribution over time. This means developing tools and protocols that are cost-effective and provide consistent and high-quality data, which is a major challenge. A new tool and protocol with these capabilities for non-extractively assessing the status of fishes and benthic habitats is presented here: the KOSMOS 3.0 underwater video system. Methods: The KOSMOS 3.0 was conceived based on the pre-existing and successful STAVIRO lander, and developed within a digital fabrication laboratory where collective intelligence was contributed mostly voluntarily within a managed project. Our suite of mechanical, electrical, and software engineering skills were combined with ecological knowledge and field work experience. Results: Pool and aquarium tests of the KOSMOS 3.0 satisfied all the required technical specifications and operational testing. The prototype demonstrated high optical performance and high consistency with image data from the STAVIRO. The project’s outcomes are shared under a Creative Commons Attribution CC-BY-SA license. The low cost of a KOSMOS unit (~1400 €) makes multiple units affordable to modest research or monitoring budgets.
Full article
►▼
Show Figures
Open AccessArticle
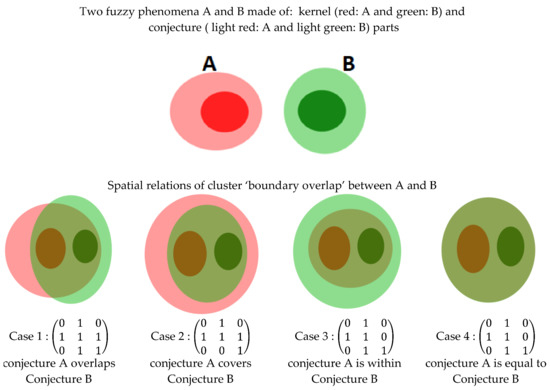
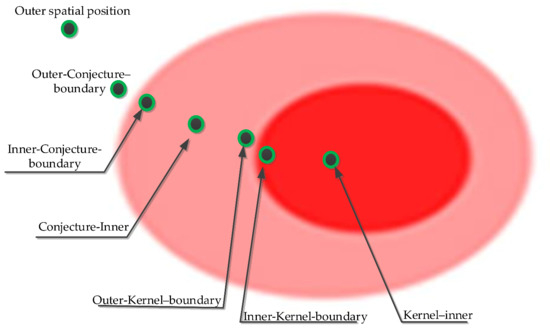
A Decentralized Fuzzy Rule-Based Approach for Computing Topological Relations between Spatial Dynamic Continuous Phenomena with Vague Boundaries Using Sensor Data
by
Roger Cesarié Ntankouo Njila, Mir Abolfazl Mostafavi and Jean Brodeur
Cited by 2 | Viewed by 3194
Abstract
Sensor networks (SN) are increasingly used for the observation and monitoring of spatiotemporal phenomena and their dynamics such as pollution, noise and forest fires. In multisensory systems, a sensor node may be equipped with different sensing units to observe and detect several spatiotemporal
[...] Read more.
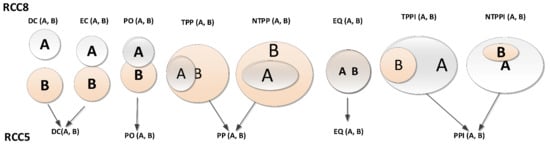
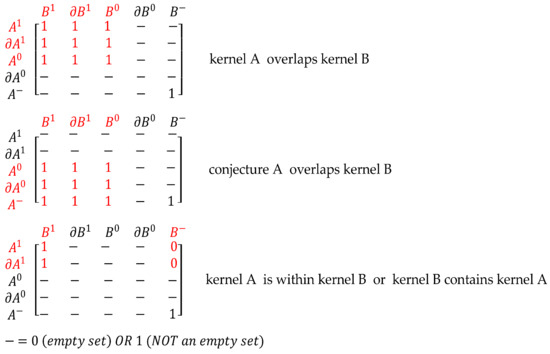
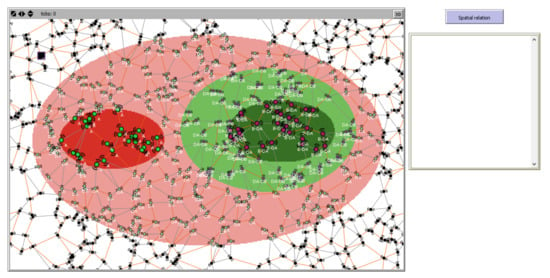
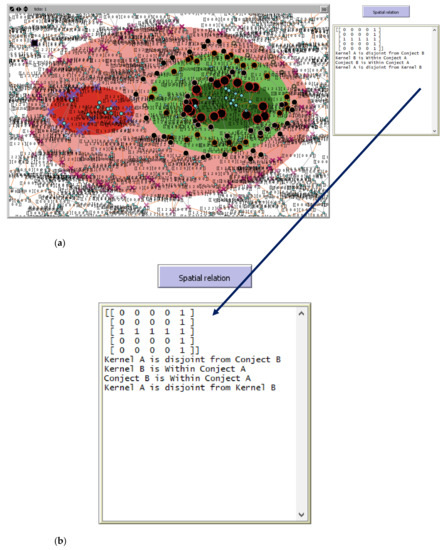
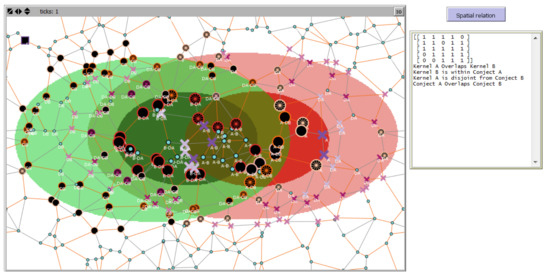
Sensor networks (SN) are increasingly used for the observation and monitoring of spatiotemporal phenomena and their dynamics such as pollution, noise and forest fires. In multisensory systems, a sensor node may be equipped with different sensing units to observe and detect several spatiotemporal phenomena at the same time. Simultaneous detection of different phenomena can be used to infer their spatial interactions over space and time. For this purpose, decentralized spatial computing approaches have shown their potential for effective reasoning on spatial phenomena within a sensor network. However, in most cases, spatial extents of continuous dynamic phenomena are uncertain, and their relations and interactions cannot be inferred by the existing approaches at the sensor node level. To address this limitation, in this paper, we propose and develop a decentralized fuzzy rule-based spatial reasoning approach to depict the spatial relations that hold between two evolving spatial phenomena with fuzzy boundaries. The proposed method benefits from a more adapted fuzzy-crisp representation of dynamic phenomena observed by SN where each vague phenomenon is composed of five distinguished zones including the kernel, conjecture and exterior zone and their boundaries. For each detected phenomenon, a sensor node will report one of these zones based on its location. Aggregation of the information reported from the sensor nodes allows reasoning on spatial relations between the observed phenomena and their evolution. Such spatial information provides users with more valuable near real-time information on the state of different phenomena that can be used for informed decision-making.
Full article
►▼
Show Figures
Open AccessArticle
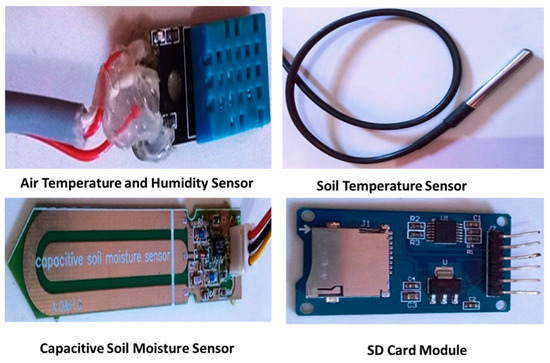
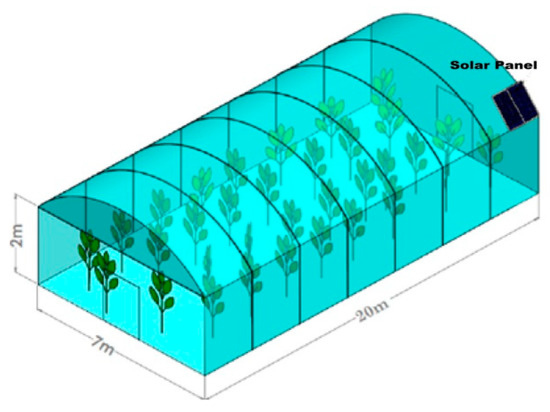
Designing Low-Cost Capacitive-Based Soil Moisture Sensor and Smart Monitoring Unit Operated by Solar Cells for Greenhouse Irrigation Management
by
Abdelaziz M. Okasha, Hasnaa G. Ibrahim, Adel H. Elmetwalli, Khaled Mohamed Khedher, Zaher Mundher Yaseen and Salah Elsayed
Cited by 42 | Viewed by 16854
Abstract
Precise and quick estimates of soil moisture content for the purpose of irrigation scheduling are fundamentally important. They can be accomplished through the continuous monitoring of moisture content in the root zone area, which can be accomplished through automatic soil moisture sensors. Commercial
[...] Read more.
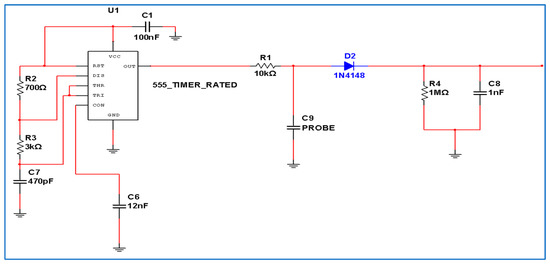
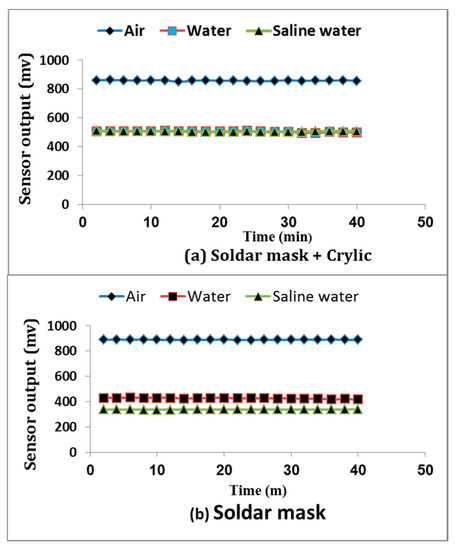
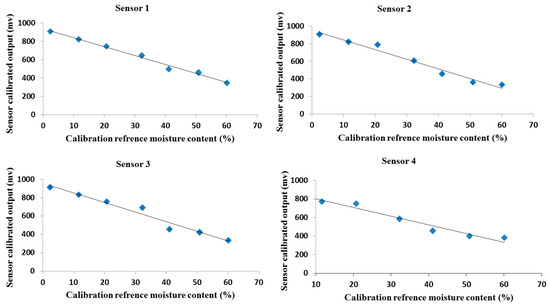
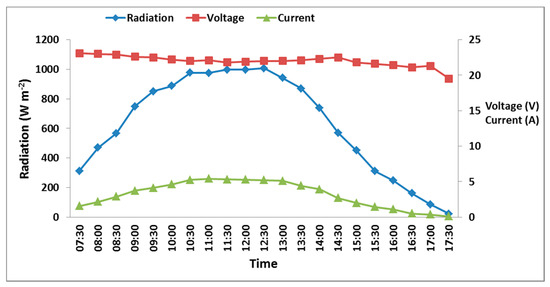
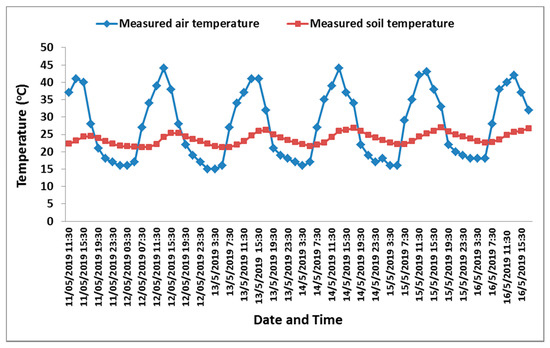
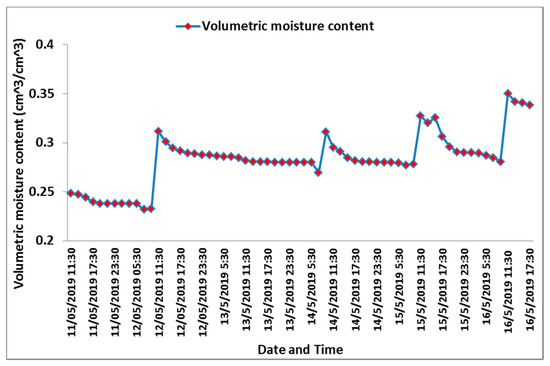
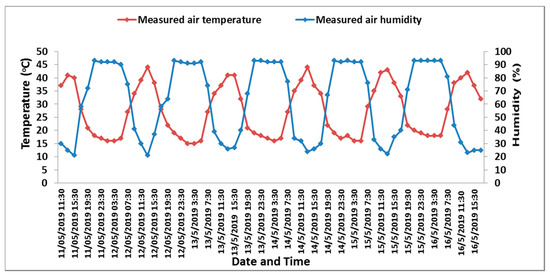
Precise and quick estimates of soil moisture content for the purpose of irrigation scheduling are fundamentally important. They can be accomplished through the continuous monitoring of moisture content in the root zone area, which can be accomplished through automatic soil moisture sensors. Commercial soil moisture sensors are still expensive to be used by famers, particularly in developing countries, such as Egypt. This research aimed to design and calibrate a locally manufactured low-cost soil moisture sensor attached to a smart monitoring unit operated by Solar Photo Voltaic Cells (SPVC). The designed sensor was evaluated on clay textured soils in both lab and controlled greenhouse environments. The calibration results demonstrated a strong correlation between sensor readings and soil volumetric water content (
θV). Higher soil moisture content was associated with decreased sensor output voltage with an average determination coefficient (
R2) of 0.967 and a root-mean-square error (RMSE) of 0.014. A sensor-to-sensor variability test was performed yielding a 0.045 coefficient of variation. The results obtained from the real conditions demonstrated that the monitoring system for real-time sensing of soil moisture and environmental conditions inside the greenhouse could be a robust, accurate, and cost-effective tool for irrigation management.
Full article
►▼
Show Figures
Open AccessArticle
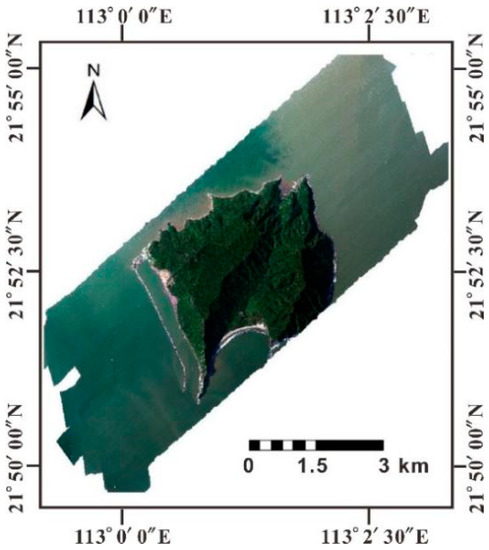
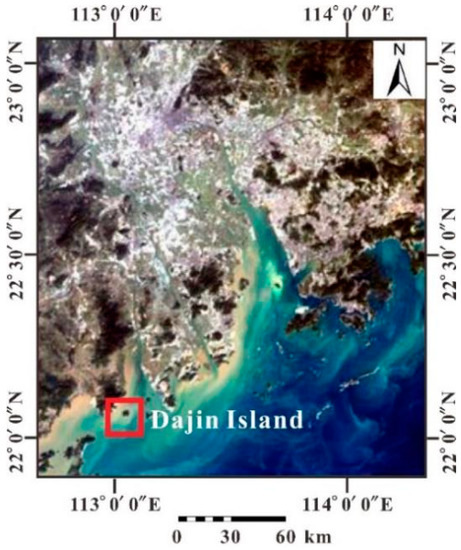
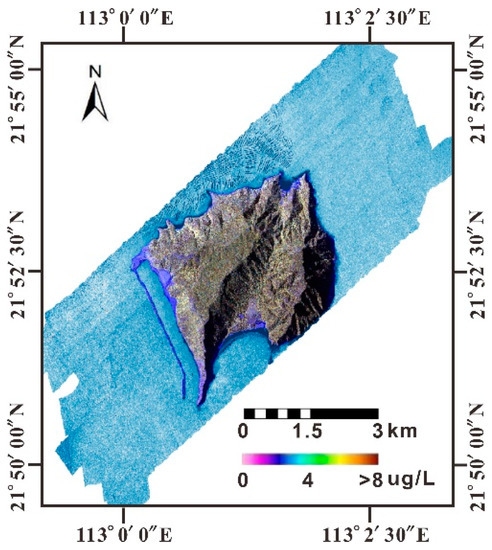
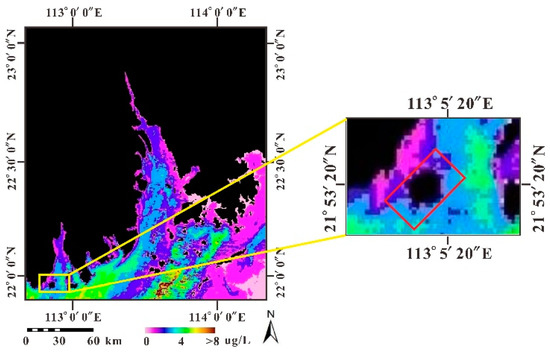
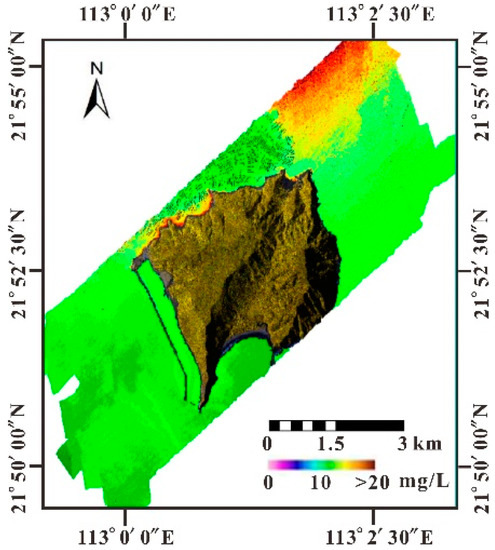
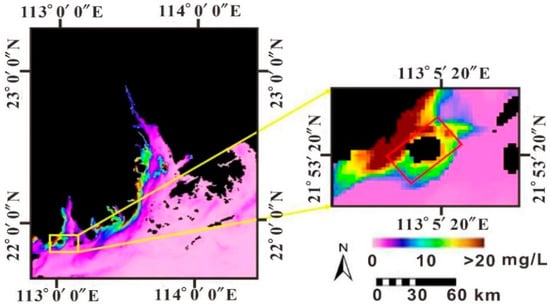
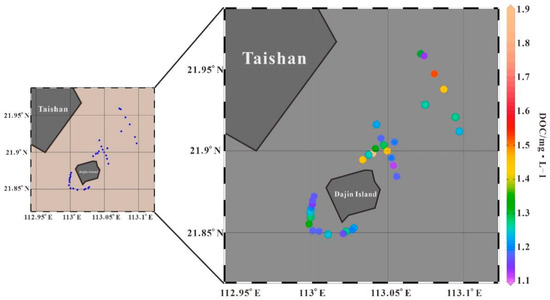
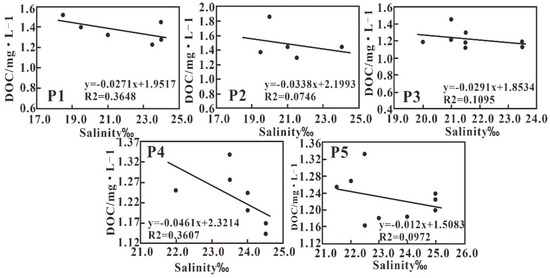
Assessment of Eutrophication and DOC Sources Tracing in the Sea Area around Dajin Island Using CASI and MODIS Images Coupled with CDOM Optical Properties
by
Shuchang Ma, Xiaoyu Zhang, Yixuan Xiong, Guorong Huang, Yachao Han and Valerio Funari
Cited by 5 | Viewed by 3477
Abstract
The sea area around Dajin Island in the Pearl River Estuary is the second-largest habitat in China for the Indo-Pacific humpback dolphin (Sousa Chinensis). However, the rapid economic development of this area brings potential threats to the aquatic ecology around Dajin Island. Real-time
[...] Read more.
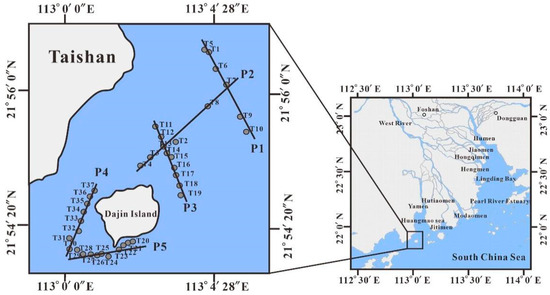
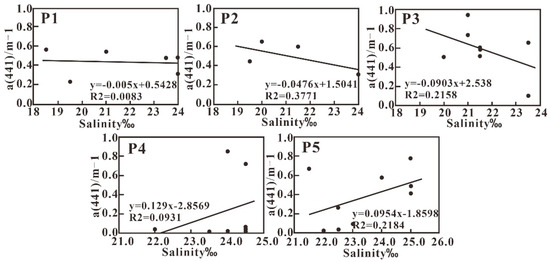
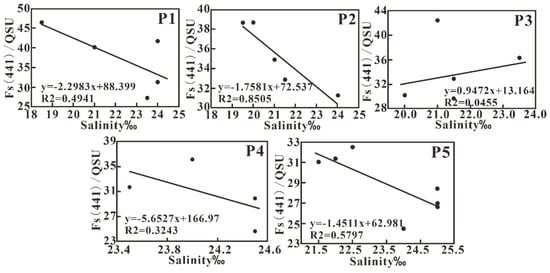
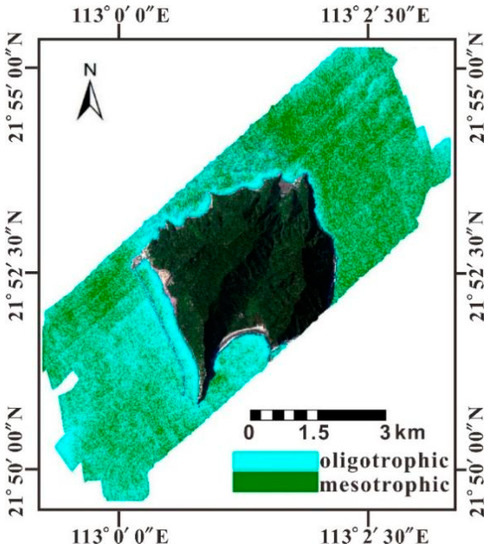
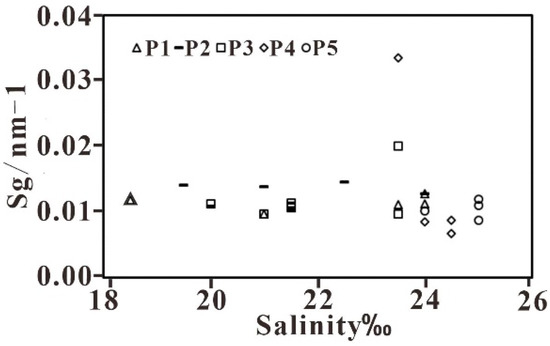
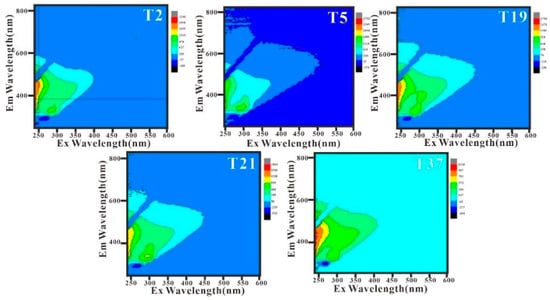
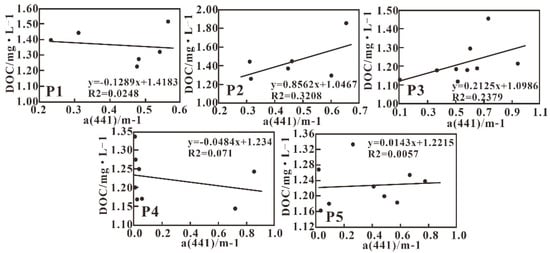
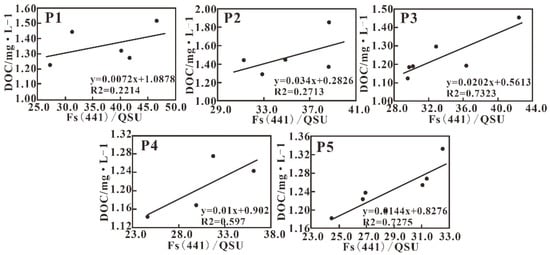
The sea area around Dajin Island in the Pearl River Estuary is the second-largest habitat in China for the Indo-Pacific humpback dolphin (Sousa Chinensis). However, the rapid economic development of this area brings potential threats to the aquatic ecology around Dajin Island. Real-time monitoring and evaluation of the ecological health of the sea area are urgent. In this study, band ratio and single-band inversion algorithms were performed to obtain Chlorophyll-a (Chl-a) and Suspended Sediment Concentration (SSC), relying on both Compact Airborne Spectrographic Imager (CASI) and Moderate resolution Imaging Spectrometer (MODIS) images. The CASI/Chl-a with high spatial resolution was adopted to assess the eutrophication status, while the dissolved organic carbon (DOC) concentration and chromophoric dissolved organic matter (CDOM) optical properties were used to derive the material composition and sources. The results suggest that the study area is under a low to medium eutrophication state with evenly distributed low Chl-a concentration. However, higher Chl-a is observed in the outer estuary with MODIS/Chl-a. The relatively high DOC concentration, especially in the north, where aquaculture is practiced, and near the estuary’s main axis, i.e., east Dajin Island, indicates that the eutrophication state might be underestimated using satellite chlorophyll alone. CDOM optical properties indicated that terrestrial materials are the DOC’s primary material sources, but the DOC derived from fishery aquaculture cannot be ignored. The low Chl-a concentration is likely due to the turbulent hydrodynamic regime caused by jet flow and reciprocating flow in this marine area. Comprehensive observation, including the assessment of different technological platforms, is suggested for the aquatic environment.
Full article
►▼
Show Figures
Open AccessCommunication
Methodology for Addressing Infectious Aerosol Persistence in Real-Time Using Sensor Network
by
Sepehr Makhsous, Joelle M. Segovia, Jiayang He, Daniel Chan, Larry Lee, Igor V. Novosselov and Alexander V. Mamishev
Cited by 17 | Viewed by 7166
Abstract
Human exposure to infectious aerosols results in the transmission of diseases such as influenza, tuberculosis, and COVID-19. Most dental procedures generate a significant number of aerosolized particles, increasing transmission risk in dental settings. Since the generation of aerosols in dentistry is unavoidable, many
[...] Read more.
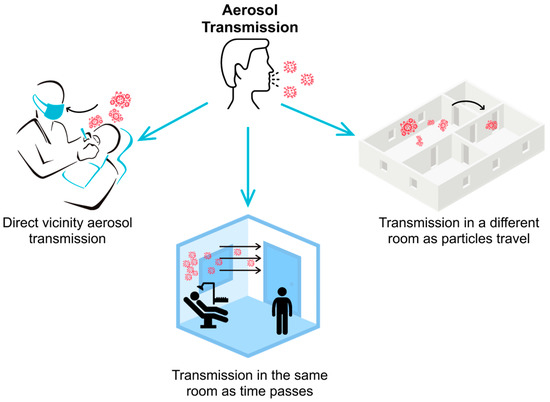
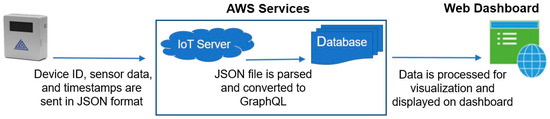
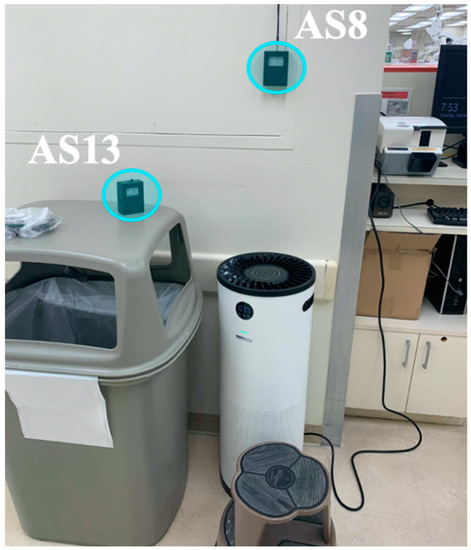
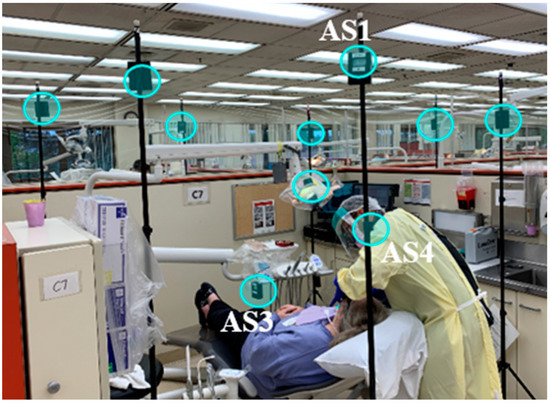
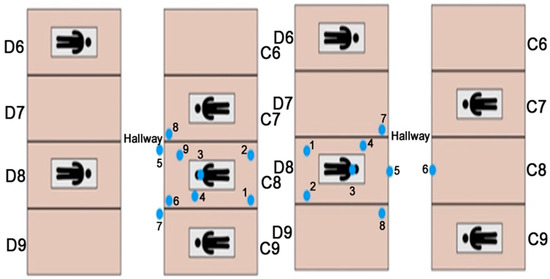
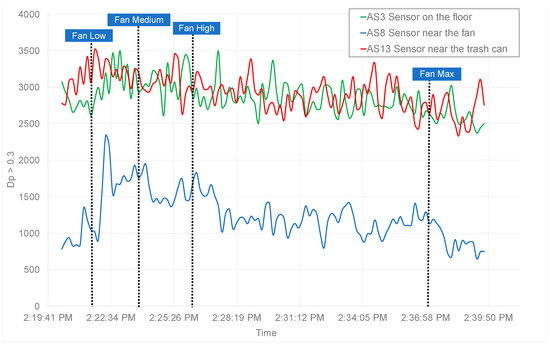
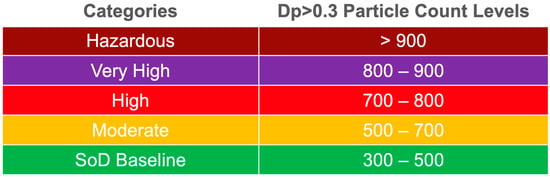
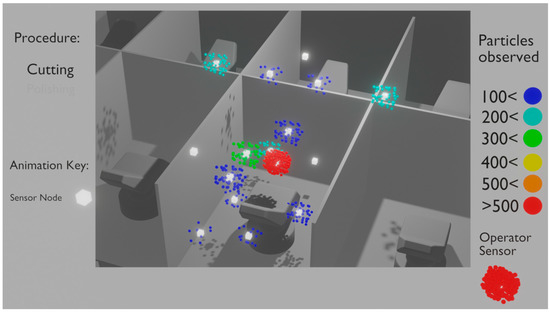
Human exposure to infectious aerosols results in the transmission of diseases such as influenza, tuberculosis, and COVID-19. Most dental procedures generate a significant number of aerosolized particles, increasing transmission risk in dental settings. Since the generation of aerosols in dentistry is unavoidable, many clinics have started using intervention strategies such as area-filtration units and extraoral evacuation equipment, especially under the relatively recent constraints of the pandemic. However, the effectiveness of these devices in dental operatories has not been studied. Therefore, the ability of dental personnel to efficiently position and operate such instruments is also limited. To address these challenges, we utilized a real-time sensor network for assessment of aerosol dynamics during dental restoration and cleaning producers with and without intervention. The strategies tested during the procedures were (i) local area High-Efficiency Particle Air (HEPA) filters and (ii) Extra-Oral Suction Device (EOSD). The study was conducted at the University of Washington School of Dentistry using a network of 13 fixed sensors positioned within the operatory and one wearable sensor worn by the dental operator. The sensor network provides time and space-resolved particulate matter (PM) data. Three-dimensional (3D) visualization informed aerosol persistence in the operatory. It was found that area filters did not improve the overall aerosol concentration in dental offices in a significant way. A decrease in PM concentration by an average of 16% was observed when EOSD equipment was used during the procedures. The combination of real-time sensors and 3D visualization can provide dental personnel and facility managers with actionable feedback to effectively assess aerosol transmission in medical settings and develop evidence-based intervention strategies.
Full article
►▼
Show Figures
Open AccessFeature PaperReview
Research Trends and Future Perspectives in Marine Biomimicking Robotics
by
Jacopo Aguzzi, Corrado Costa, Marcello Calisti, Valerio Funari, Sergio Stefanni, Roberto Danovaro, Helena I. Gomes, Fabrizio Vecchi, Lewis R. Dartnell, Peter Weiss, Kathrin Nowak, Damianos Chatzievangelou and Simone Marini
Cited by 27 | Viewed by 8795
Abstract
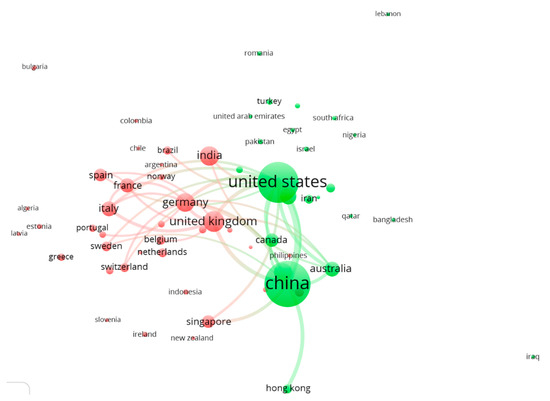
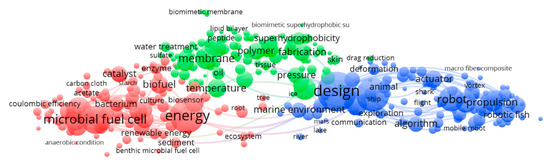
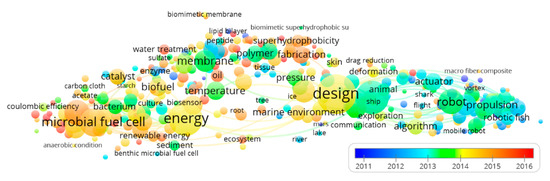
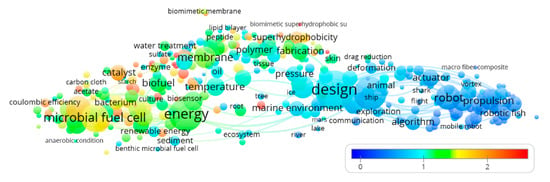
Mechatronic and soft robotics are taking inspiration from the animal kingdom to create new high-performance robots. Here, we focused on marine biomimetic research and used innovative bibliographic statistics tools, to highlight established and emerging knowledge domains. A total of 6980 scientific publications retrieved
[...] Read more.
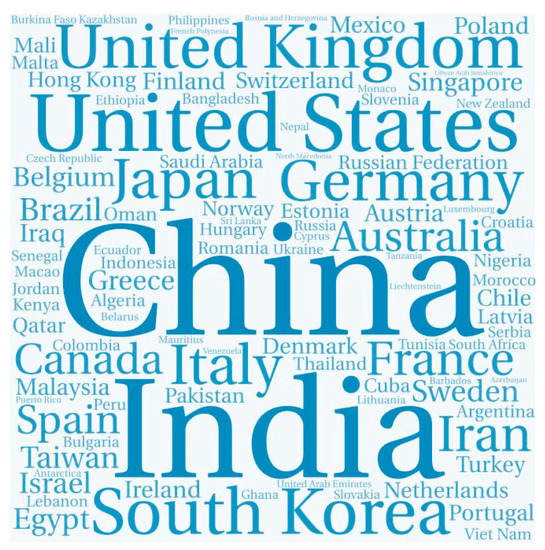
Mechatronic and soft robotics are taking inspiration from the animal kingdom to create new high-performance robots. Here, we focused on marine biomimetic research and used innovative bibliographic statistics tools, to highlight established and emerging knowledge domains. A total of 6980 scientific publications retrieved from the Scopus database (1950–2020), evidencing a sharp research increase in 2003–2004. Clustering analysis of countries collaborations showed two major Asian-North America and European clusters. Three significant areas appeared: (i) energy provision, whose advancement mainly relies on microbial fuel cells, (ii) biomaterials for not yet fully operational soft-robotic solutions; and finally (iii), design and control, chiefly oriented to locomotor designs. In this scenario, marine biomimicking robotics still lacks solutions for the long-lasting energy provision, which presently hinders operation autonomy. In the research environment, identifying natural processes by which living organisms obtain energy is thus urgent to sustain energy-demanding tasks while, at the same time, the natural designs must increasingly inform to optimize energy consumption.
Full article
►▼
Show Figures
Open AccessArticle
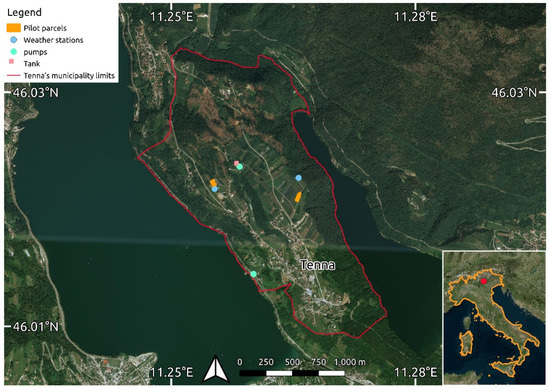
An Open Source Low-Cost Device Coupled with an Adaptative Time-Lag Time-Series Linear Forecasting Modeling for Apple Trentino (Italy) Precision Irrigation
by
Simone Figorilli, Federico Pallottino, Giacomo Colle, Daniele Spada, Claudio Beni, Francesco Tocci, Simone Vasta, Francesca Antonucci, Mauro Pagano, Marco Fedrizzi and Corrado Costa
Cited by 11 | Viewed by 4434
Abstract
Precision irrigation represents those strategies aiming to feed the plant needs following the soil’s spatial and temporal characteristics. Such a differential irrigation requires a different approach and equipment with regard to conventional irrigation to reduce the environmental impact and the resources use while
[...] Read more.
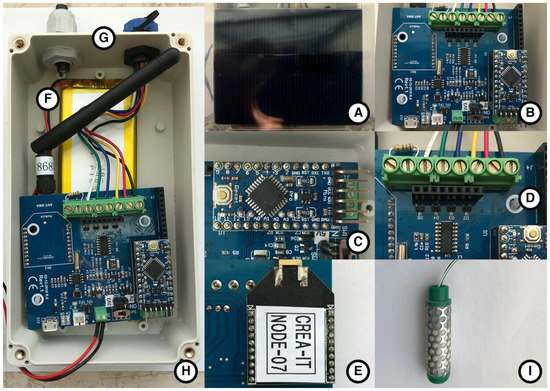
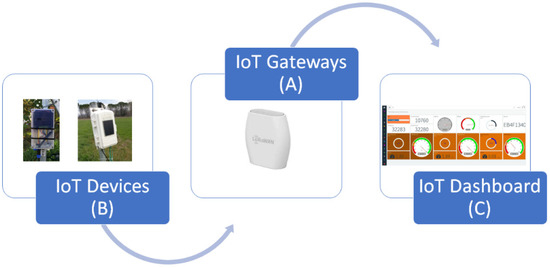
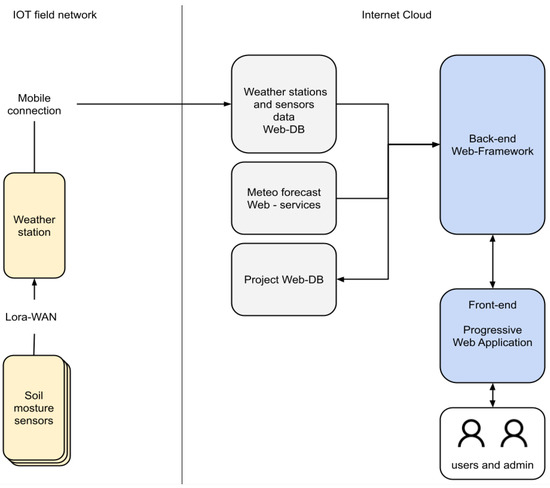
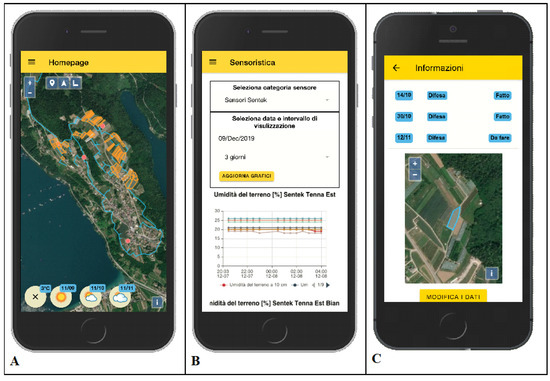
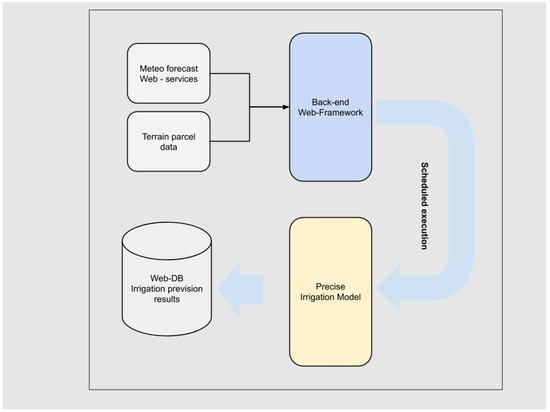
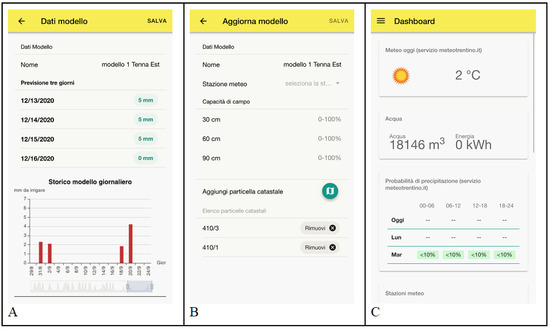
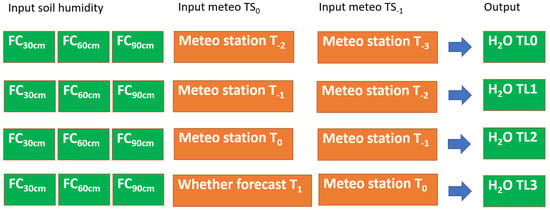
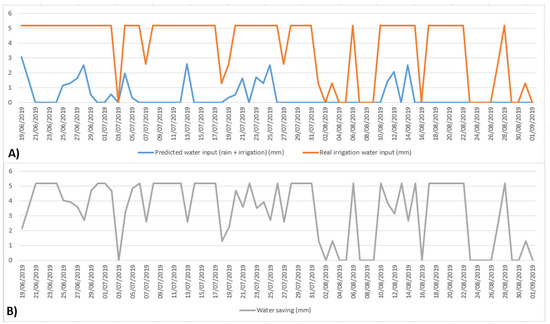
Precision irrigation represents those strategies aiming to feed the plant needs following the soil’s spatial and temporal characteristics. Such a differential irrigation requires a different approach and equipment with regard to conventional irrigation to reduce the environmental impact and the resources use while maximizing the production and thus profitability. This study described the development of an open source soil moisture LoRa (long-range) device and analysis of the data collected and updated directly in the field (i.e., weather station and ground sensor). The work produced adaptive supervised predictive models to optimize the management of agricultural precision irrigation practices and for an effective calibration of other agronomic interventions. These approaches are defined as adaptive because they self-learn with the acquisition of new data, updating the on-the-go model over time. The location chosen for the experimental setup is a cultivated area in the municipality of Tenna (Trentino, Alto Adige region, Italy), and the experiment was conducted on two different apple varieties during summer 2019. The adaptative partial least squares time-lag time-series modeling, in operative field conditions, was a posteriori applied in the consortium for 78 days during the dry season, producing total savings of 255 mm of irrigated water and 44,000 kW of electricity, equal to 10.82%.
Full article
►▼
Show Figures
Open AccessArticle
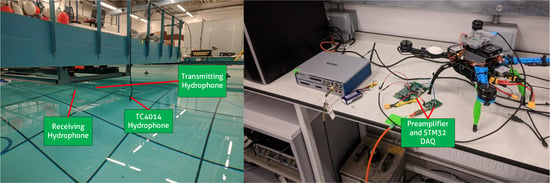
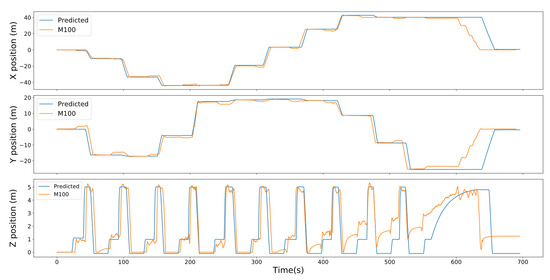
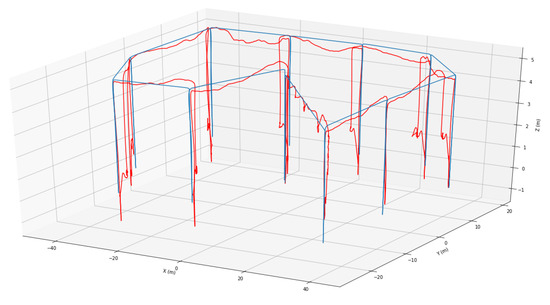
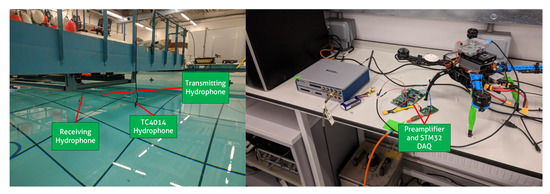
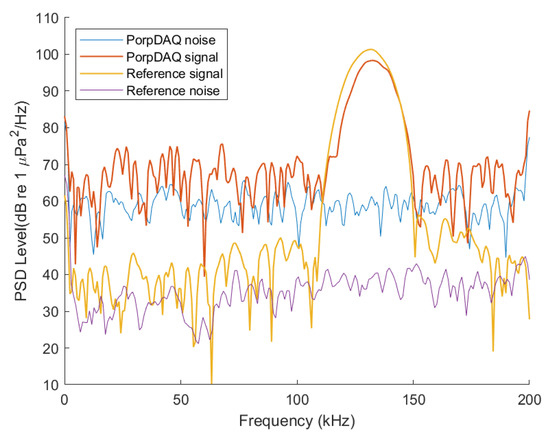
Autonomous Deployment of Underwater Acoustic Monitoring Devices Using an Unmanned Aerial Vehicle: The Flying Hydrophone
by
Daniel Babatunde, Simon Pomeroy, Paul Lepper, Ben Clark and Rebecca Walker
Cited by 6 | Viewed by 6088
Abstract
Unmanned aerial vehicles (UAV) are increasingly becoming a popular tool in the observation and study of marine mammals. However, the potential capabilities of these vehicles regarding autonomous operations are not being fully exploited for passive underwater acoustic monitoring in marine mammal research. This
[...] Read more.
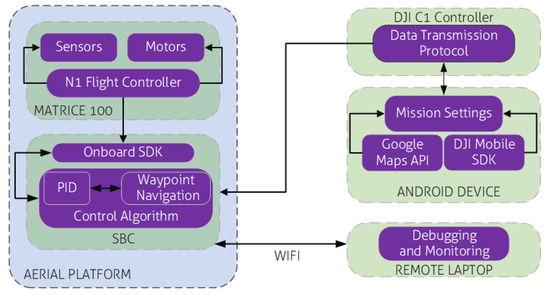
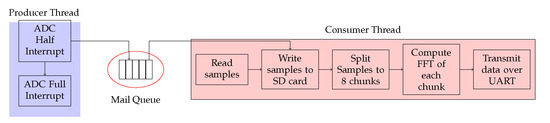
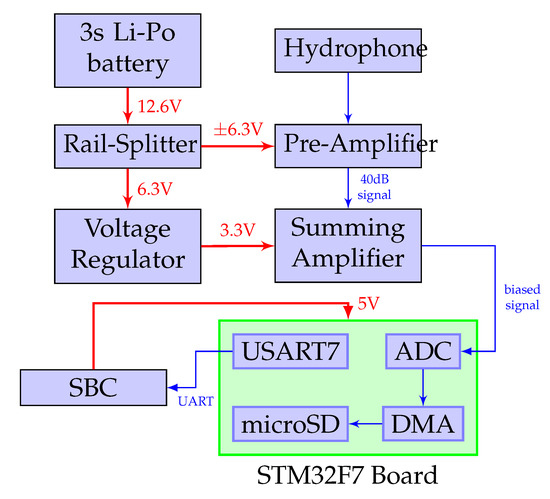
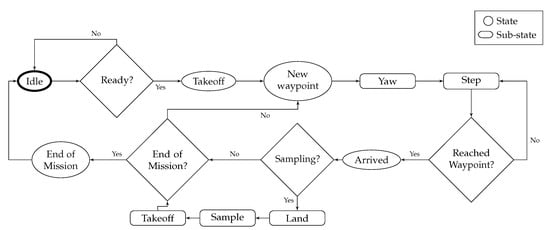
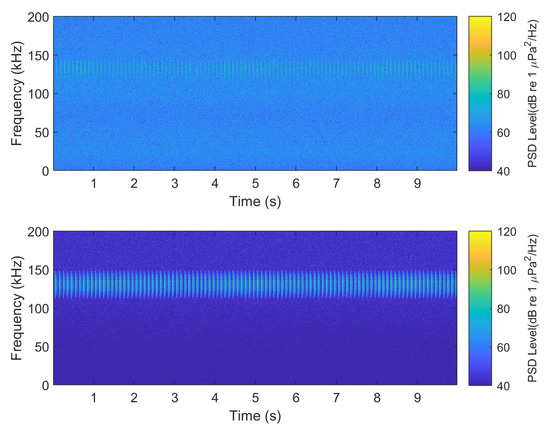
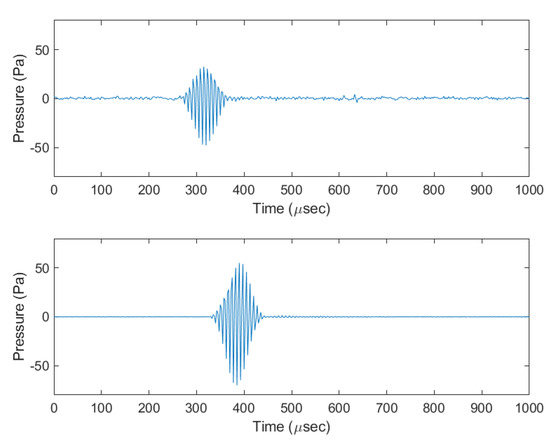
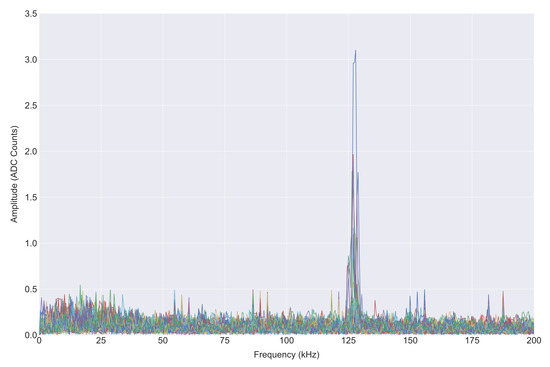
Unmanned aerial vehicles (UAV) are increasingly becoming a popular tool in the observation and study of marine mammals. However, the potential capabilities of these vehicles regarding autonomous operations are not being fully exploited for passive underwater acoustic monitoring in marine mammal research. This article presents results from the development of a UAV system equipped with an underwater acoustic recorder aimed at assisting with the monitoring of harbour porpoises in Special Areas of Conservation in the United Kingdom. The UAV is capable of autonomous navigation, persistent landing, take-off and automatic data acquisition at specified waypoints. The system architecture that enables autonomous UAV flight including waypoint planning and control is described. A bespoke lightweight underwater acoustic recorder (named the PorpDAQ) capable of transmitting the results of fast Fourier transforms (FFT) applied to incoming signals from a hydrophone was also designed. The system’s operation is successfully validated with a combination of outdoor experiments and indoor simulations demonstrating different UAVs capable of autonomously navigating and landing at specific waypoints while recording data in an indoor tank. Results from the recorder suggest that lightweight, relatively low-cost systems can be used in place of heavier more expensive alternatives.
Full article
►▼
Show Figures






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}