Abstract
There is great focus on phenomena that depend on their past history or their past state. The mathematical models of these phenomena can be described by differential equations of a self-referred type. This paper is devoted to studying the solvability of a state-dependent integro-differential inclusion. The existence and uniqueness of solutions to a state-dependent functional integro-differential inclusion with delay nonlocal condition is studied. We, moreover, conclude the existence of solutions to the problem with the integral condition and the infinite-point boundary one. Some properties of the solutions are given. Finally, two examples illustrating the main result are presented.
Keywords:
nonlocal condition; infinite point; delay integral operator; differential inclusion; self-dependence MSC:
34A12; 34B18; 34B15; 34B10; 34D20
1. Introduction
A functional equation is an equation involving an unknown function at more than an argument value. In functional equations, argument deviations are the variations between the argument values of an unknown function and an independent variable t. The functional differential equation, or differential equations with diverging arguments, is created by combining the concepts of differential and functional equations. Functional differential equations are used to describe many phenomena in different sciences, see [1]. Nonlocal problems in mathematical physics are problems in which, unlike traditional boundary value conditions, the desired function’s values at distinct places of the boundary (and/or its values at the boundary and outside it) are related. In fact, it is reasonable to treat the theory of functional differential equations and the theory of nonlocal problems as one indivisible theory.
For various reasons, many researchers have been interested in researching the nonlocal problem of functional differential equations with infinite point conditions; see for example [2,3,4,5,6,7,8,9,10]. The deviation of the argument in the current literature’s differential and integral equations with diverging arguments usually concerns only the time itself, see [11,12]. In theory and practice, however, another case exists in which the deviating arguments are dependent on both the state variable y and the time t. Several studies devoted to such differential equations have lately been published, for example [13,14,15,16,17]. The first papers studying this class of functional equations with self-reference, Eder [18], studied the existence of the unique solution for the differential equation
Wang [19] studied the strong solution and maximal strong solution for the equation
where is continuous and monotone, and .
Feckan [20] studied the existence solution
Buica [13] studied the existence and continuous dependence of solutions, on of the functional differential equation
where and .
Stanek [21] studied global properties of decreasing solution of the equation
Stanek [16] studied global properties of solution of the functional differential equation
In this study, the initial value problem of the functional differential inclusion with self-dependence on a nonlinear delay integral operator
with the nonlocal condition
was investigated. We study the existence of the absolutely continuous solution and demonstrate the continuous dependence on and . Moreover, as applications, we study the nonlocal problem of Equation (1) with the integral condition
and with the infinite-point boundary condition
if is convergent.
The paper is organized as follows: In Section 2, the equivalence of the functional differential inclusion with state-dependence on the nonlinear delay integral operator (1) with the nonlocal condition (2) is given. In Section 3, we study the existence of absolutely continuous solutions to problem (1) and (2), and conclude the existence of solutions to problem (1) with the integral condition (3) and the infinite-point boundary condition (4). In Section 4, we establish the existence of exactly one solution for (1) and (2). In Section 5, the continuous dependence of the solution is studied. Finally, in Section 6, two examples are given to corroborate the main existence result and a numerical example is given to demonstrate the difference between the exact solution and numerical solution.
2. Auxiliary Results
Consider the following assumptions:
- (a)
- is nonempty, convex and closed .
- (b)
- is measurable in for every .
- (c)
- is upper semi continuous in y for every .
- (d)
- There exist a bounded measurable function and a positive constant b, such that
From the assumptions (a)–(d), we can deduce that there exists a , such that the following is satisfied:
- (1)
- satisfies Carathéodory condition:
- -
- For each is continuous;
- -
- For each is measurable;
- -
- There exist a bounded measurable function and a positive constant , such thatand the functional r satisfies the integro-differential equation
- (2)
- satisfies Carathéodory condition:
- -
- For each is continuous;
- -
- For each is measurable;
- -
- (3)
- is continuous and nondecreasing, .
- (4)
3. Existence of Solution
In the following theorem, using Schauder’s fixed point theorem, we establish the existence of at least one solution of (1) and (2).
Proof.
Now where
Then we have for
and so
Thus,
But
and so
Hence
Now, let such that , then
This proves that ; the class of functions is uniformly bounded and equi-continuous in .
Let , , then from assumptions and we obtain and as . Also
Now
Then as , the operator A is continuous.
- For the nonlocal integral condition, we present the following theorem.
Proof.
Let be the solution of the nonlocal problem (1) with (3). Let , h is an increasing function, , then, as the nonlocal condition (2) will be
and
This completes the proof. □
- For the infinite-point boundary condition, we present the following theorem.
4. Uniqueness of the Solution
Consider the following assumptions:
- (â)
- The set is nonempty, convex and closed .
- -
- is measurable in for every .
- -
- satisfies the Lipschitz condition with a positive constant b such thatwhere is the Hausdorff metric between the two subsets .
Remark 2.
From this assumptions we can deduce that there exists a function , such that
- (1*)
- is measurable in t for any and satisfies the Lipschitz condition
- (2*)
- is measurable in t for any and satisfies the Lipschitz condition
- (3*)
5. Continuous Dependence
Theorem 5.
Proof.
Let be a solution of the integral equation
such that then . Then
and so
Thus, we arrive at
which reduces to
Therefore, we obtain
Hence
Theorem 6.
6. Examples
Example 1.
Consider the differential equation
with condition
Set
Then
and also
Example 2.
Consider the differential equation
with condition
The integral equation
Set
Then
and also
Example 3.
Consider the differential equation
with condition
The integral equation
Set
Then
and also
It is clear that the assumptions – of Theorem 1 are satisfied with being measurably bounded, , . Therefore, by applying to Theorem 1, the given nonlocal problem (27) and (28) has a solution given by the integral solution (29).
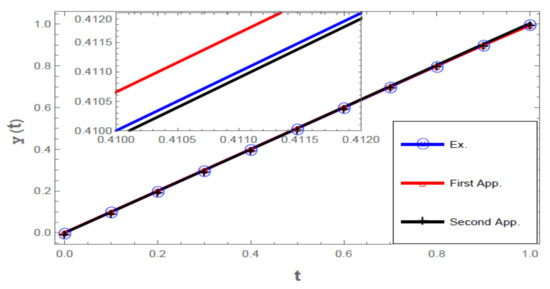
The exact solution of (27) and (28) is , we use Picard’s method to estimate the solution of (27) and (28).
and
Figure 1 shows the valuesobtained from the exact solution, the first and the second iterations for different values of t, the three lines in Figure 1 semi coincide; at the top of Figure 1, the lines have been enlarged to show the difference between them.
Figure 1.
Exact solution, first approximation and second approximation.
7. Conclusions
In this work, the existence of an absolutely continuous solution using Schauder’s fixed point theorem, the uniqueness solution and the continuous dependence of the functional differential inclusion with self-dependence on a nonlinear delay integral operator were studied. Some examples were introduced to illustrate the benefits of our results. Lastly, the Picard method was used to estimate the solution of a given example and plot the solution.
Author Contributions
A.M.A.E.-S. and R.G.A. directed the study and helped with the inspection. All the authors carried out the main results of this article, drafted the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This research has been funded by the Scientific Research Deanship at the University of Ha’il, Saudi Arabia, through project number RG-20 125.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
This research has been funded by the Scientific Research Deanship at the University of Ha’il, Saudi Arabia, through project number RG-20 125.
Conflicts of Interest
The authors declare that they have no competing interest. There are no non-financial competing interest (political, personal, religious, ideological, academic, intellectual, commercial or any other) to declare in relation to this manuscript.
References
- Hale, J.K. Theory of Functional Differential Equations; Springer: New York, NY, USA, 1977. [Google Scholar]
- El-Sayed, A.M.A.; Ahmed, R.G. Infinite point and Riemann–Stieltjes integral conditions for an integro–differential equation. Nonlinear Anal. Model. Control 2019, 24, 733–754. [Google Scholar] [CrossRef]
- El-Sayed, A.M.A.; Ahmed, R.G. Solvability of a coupled system of functional integro–differential equations with infinite point and Riemann–Stieltjes integral conditions. Appl. Math. Comput. 2020, 370, 124918. [Google Scholar] [CrossRef]
- El-Sayed, A.M.A.; Ahmed, R.G. Existence of Solutions for a Functional Integro-Differential Equation with Infinite Point and Integral Conditions. Int. J. Appl. Comput. Math. 2019, 5, 108. [Google Scholar] [CrossRef]
- El-Sayed, A.M.A.; Ahmed, R.G. Solvability of the functional integro-differential equation with self-reference and state-dependence. J. Nonlinear Sci. Appl. 2020, 13, 1–8. [Google Scholar] [CrossRef][Green Version]
- Srivastava, H.M.; El-Sayed, A.M.A.; Gaafar, F.M. A Class of Nonlinear Boundary Value Problems for an Arbitrary Fractional-Order Differential Equation with the Riemann-Stieltjes Functional Integral and Infinite-Point Boundary Conditions. Symmetry 2018, 10, 508. [Google Scholar] [CrossRef]
- Zhong, Q.; Zhang, X. Positive solution for higher-order singular infinite-point fractional differential equation with p-Laplacian. Adv. Differ. Equ. 2016, 2016, 11. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, L.; Wu, Y.; Zou, Y. Fixed-point theorems for systems of operator equations and their applications to the fractional differential equations. J. Funct. Spaces 2018, 2018, 7469868. [Google Scholar] [CrossRef]
- Ge, F.; Zhou, H.; Kou, C. Existence of solutions for a coupled fractional differential equations with infinitely many points boundary conditions at resonance on an unbounded domain. Differ. Equ. Dyn. Syst. 2019, 24, 395–411. [Google Scholar] [CrossRef]
- El-Owaidy, H.; El-Sayed, A.M.A.; Ahmed, R.G. On an Integro–Differential equation of arbitary (fractional) orders with nonlocal integral and Infinite Point boundary Conditions. Fract. Differ. Calc. 2019, 9, 227–242. [Google Scholar] [CrossRef]
- Bacotiu, C. Volterra-fredholm nonlinear systems with modified argument via weakly picard operators theory. Carpathian J. Math. 2008, 24, 1–9. [Google Scholar]
- Benchohra, M.; Darwish, M.A. On unique solvability of quadratic integral equations with linear modification of the argument. Miskolc Math. Notes 2009, 10, 3–10. [Google Scholar] [CrossRef]
- Buica, A. Existence and continuous dependence of solutions of some functional-differential equations. Semin. Fixed Point Theory A Publ. Semin. Fixed Point Theory-Cluj-Napoca 1995, 3, 1–14. [Google Scholar]
- El-Sayed, A.M.A.; El-Owaidy, H.; Ahmed, R.G. Solvability of a boundary value problem of self–reference functional differential equation with infinite point and integral conditions. J. Math. Comput. Sci. 2020, 21, 296–308. [Google Scholar] [CrossRef]
- Zhang, P.; Gong, X. Existence of solutions for iterative differential equations. Electron. J. Differ. Equ. 2014, 2014, 1–10. [Google Scholar]
- Stanek, S. Globel properties of solutions of the functional differenatial equation x(t)x′(t)=kx(x(t)),0<|k|<1. Funct. Differ. Equ. 2002, 9, 527–550. [Google Scholar]
- Berinde, V. Existence and approximation of solutions of some first order iterative differential equations. Miskolc Math. Notes 2010, 11, 13–26. [Google Scholar] [CrossRef]
- Eder, E. The functional differential equation x′(t)=x(x(t)). J. Differ. Equ. 1984, 54, 390–400. [Google Scholar] [CrossRef]
- Wang, K. On the equation x′(t)=f(x(x(t))). Funkcialaj Ekvacioj 1990, 33, 405–425. [Google Scholar]
- Feckan, M. On a certain type of functional differential equations. Math. Slovaca 1993, 43, 39–43. [Google Scholar]
- Stanek, S. Global properties of decreasing solutions of the equation x′(t)=x(x(t))+x(t). Funct. Differ. Equ. 1997, 4, 191–213. [Google Scholar]
- Kolomogorov, A.N.; Fomin, S.V.; Kirk, W.A. Inroductory Real Analysis; Dover Publication Inc.: Mineola, NY, USA, 1975. [Google Scholar]
- Goebel, K.; Kirk, W.A. Topics in Metric Fixed Point Theory; Cambirdge Universty Press: New York, NY, USA, 1990. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).