Abstract
We carried out a local comparison between two ninth convergence order schemes for solving nonlinear equations, relying on first-order Fréchet derivatives. Earlier investigations require the existence as well as the boundedness of derivatives of a high order to prove the convergence of these schemes. However, these derivatives are not in the schemes. These assumptions restrict the applicability of the schemes, which may converge. Numerical results along with a boundary value problem are given to examine the theoretical results. Both schemes are symmetrical not only in the theoretical results (formation and convergence order), but the numerical and dynamical results are also similar. We calculated the convergence radii of the nonlinear schemes. Moreover, we obtained the extraneous fixed points for the proposed schemes, which are repulsive and are not part of the solution space. Lastly, the theoretical and numerical results are supported by the dynamic results, where we plotted basins of attraction for a selected test function.
1. Introduction
Let be an operator, where and are Banach spaces and is an open convex subset of . F is a Fréchet differentiable operator at each point of . We use this scheme to find a solution of the nonlinear operator equation in the form
Newton’s scheme is most commonly used for solving such equations. However, it is only of order two under some conditions ([1,2,3]). It is defined as follows
There are several papers on the variation or modification of Newton’s scheme in real ([1,4]) and in Banach space ([5,6]) to achieve a higher order.
A plethora of iterative scheme of convergence orders three or higher [7,8,9,10,11,12,13,14] have been developed in the literature provided that . Third convergence order schemes, each involving two linear mapping inversions, are given by Cordero and Torregrosa [15], Homeier [9], Grau- Sanchez et al. [16] and Noor and Waseem [17].
Cordero et al. [18] developed a fourth-order converging scheme involving the computation of two operators, two derivatives (first) and one linear mapping inversion. Sharma and Gupta provided in [19] a fifth convergence order scheme requiring the evaluation of two operators, two derivative (first) and two linear operator inversions. Other such schemes can be found in [20] and the references therein. The convergence orders can be extended further if multistep schemes are introduced involving more than two or three steps. Let us revisit two such schemes as follows:
Let k be a natural number; and denote the iteration function of order q. Define the k step schemes for each
and
where we define , , and .
Notice that both the schemes require k function evaluations and two inverses per complete step. The convergence order is established by Xiao and Yin in [21,22], respectively. However, there exist limitations restricting the utilizations of the aforementioned schemes. Below is a list.
—The boundedness and existence of at least and even higher orders is assumed although only is on these schemes. There even exist equations on the real line, such as the results in the previous references, which cannot assure the convergence of the schemes to a solution of the equation Let .
Define the function as
The definition of the function F gives that . The function is not continuous at and solves the equation . Thus, all the results requiring the existence of at least the third derivative of F cannot assure the convergence of the afforementioned scheme to , although they may converge.
—A priori estimates of are not provided. Thus, it is not known in advance the number of iterations to be performed to satisfy a certain predecided error tolerance.
—There is no information about if there are solutions other than
—The results are restricted in .
Notice, however, that the schemes (1) and (2) are extended in the setting of Banach space. Limitations – constitute the motivation for writing this article. Moreover, the novelty of this article is that the items – are addressed positively as follows:
—The convergence is established using only , which is in these schemes, and the idea of generalized continuity [5,18,20].
—The number of iterations to reach a predecided error tolerance is calculated.
—The isolation of is addressed.
—The results are valid in Banach space.
The techniques to achieve the aforementioned objectives are demonstrated for some specializations of schemes (1) and (2). However, the technique can be analogously used on the rest of the schemes.
Let ;
; and
These iteration functions are of convergence order three. Therefore, (1) and (2) specialize to schemes of convergence order , since and . In particular, these specializations are of schemes (1) and (2), respectively.
The convergence order can be found using the following formula
or
These computations do not require the or (in the case of Formula (6)).
We study the ball convergence comparison of the two ninth-order iterative schemes
and
where is the Fréchet derivative of operator F at the point .
Numerical results consist of the comparative study of the proposed schemes along with Newton’s scheme by using the some test functions for nonlinear equations, systems of equations and a boundary value problem. One important characteristic of this work is the comparability of the dynamics of the proposed schemes along with Newton’s scheme for the solution of nonlinear equations.
2. Convergence: Scheme 1
We describe the ball convergence of proposed schemes (3) and (4), which are based on some real functions and positive parameters. Let .
Suppose:
(a) There exists a nondecreasing and continuous function (NDCF) from such that equation
has a minimal positive (MP) zero . Set . Consider (NDCF) function h from .
(b) Equation
has an MP zero where
(c) Equation
has an MP zero denoted by , where
Set and . Consider (NDCF) from nondecreasing and continuous.
(d) Equation
has an MP zero denoted by , where
(e) Equation
has an MP zero denoted by . Set and .
(f) Equation
has an MP zero denoted by , where
(g) Equation
has an MP zero denoted by . Set and .
(h) Equation
has a minimal positive zero denoted by , where
We shall show that parameter , given by
is a convergence radius for scheme (3). By this definition, it follows for all that
and
Let and denote the open and closed balls in , respectively, of center and radius
Next, we list the hypotheses in hypothesis used in our convergence analysis. They relate to the functions as described previously.
Suppose:
is continuously differentiable and there exists a simple solution of equation .
For all ,
Set
For all ,
, where is to be determined.
There exists such that
Set
Based on hypothesis and the developed notation, we show the local convergence result for scheme (3).
Theorem 1.
Under the hypotheses in for , further suppose . Then, the sequence generated by scheme (3) starting at is well defined, remains in and converges at . Moreover, the following estimates hold true
where functions are defined earlier and r is given by (16). Furthermore, is unique as a solution of equation in the domain , given in .
Proof.
We shall prove items (22)–(25) using Induction. Consider . Then, using and , we have
Using the Banach lemma on invertible operators [12] and the preceding inequality, exists so that
In particular, if , exists, since . Then, the iterate exists by the first substep of scheme (3). We can write
So, by conditions , and (16) and (26),
Hence, the iterate and (22) is valid for n = 0. We should show is invertible, so and exist by scheme (3) for n = 0. Indeed, we have by , (17), (26) and (27)
Thus, the linear operator is invertible and
Then, using the second substep of schemes (3), (11), (21) (for i = 2), (23) (for , (26) and (28), we first have
So, we obtain, by using also the triangle inequality,
Hence, the iterate and (23) is valid for . By the third substep of scheme (3) for , we write
Then, using (12), (13), (16) (for ), (21) (for and (24)–(30), we have
So, the iterate and (24) holds true for n = 0. Similarly, if we exchange the role of with we first obtain
Hence, we see that
Replace and with and in the previous calculations to complete the induction for items (22)–(25). It then follows by the estimation
with , that and . Set for some with . Then, by , and , we see in turn that, in view of and ,
Therefore, from the invertability of M and the estimate , we conclude that . □
3. Convergence: Scheme 2
In a similar way, we provide the local convergence analysis for scheme (4). In this case, the functions , , and are defined as follows
Define by
where we suppose that the MP zero exits for equations
Then, we have, as in scheme (4),
Therefore, we have
Moreover, we can write
leading to
Next, by the third substep of scheme (4),
Hence, we have
Hence, we arrive at the local convergence result for scheme (4) corresponding to scheme (3).
Theorem 2.
Under hypotheses A with , choose . Then, the conclusions of Theorem 1 hold for scheme (4) but with and replacing and r, respectively.
4. Numerical Results
In this section, we study the efficiency of iterative proposed schemes (3) and (4). We performed a comparative study of schemes (3) and (4) along with the classical Newton’s scheme.
Example 1.

Let and be a function defined by
Then, F is Fréchet differentiable and its Fréchet derivative at any point is given by
We computed the numerical results with the help of MATLAB 2007 and the stopping criterion used for the computation is The initial approximation is 1.0 and approximate solution is 0. The numerical solutions for example 1 using the second-order Newton scheme and the proposed ninth-order scheme are given in Table 1. The numerical results in Table 1 reveal that the proposed schemes (3) and (4) perform with the same number of iterations with a little advantage to proposed scheme (3).
Table 1.
Comparison of different schemes for example 1.
Example 2.
Let and be an operator defined by
Then, F is Fréchet differentiable and its Fréchet derivative at any point is given by
We computed the numerical results with the help of MATLAB 2007 and the stopping criterion is The initial approximation is 3.5 and the approximate solution is 1.0. The numerical solutions for example 2 using different schemes are given in Table 2. The numerical results in Table 2 reveal that the proposed schemes (3) and (4) perform with the same number of iterations with a little advantage to proposed scheme (4).
Table 2.
Comparison of different schemes for example 2.
Example 3.
Let . Consider an operator defined by
The starting vector is [0.1, 0.1] and the approximate solution is [−0.2860321636288604, −0.11818560136979284]. The numerical solutions for example 3 using different methods are given in Table 3. The numerical results show that the proposed scheme (3) converges at the solution in fewer iterations in comparison with scheme (4).
Table 3.
Comparison of different schemes for example 3.
Example 4.
Consider the following boundary problem
We take and Here, and
We discretize the above problem by using the central difference schemes for the first and second-order derivatives, i.e.,
Thus, we have an nonlinear system:
Next, we solve the above problem for with the proposed scheme along with Newton’s scheme using the initial approximations . The solution [0.7321436796857499, 0.9820632479169275] of the problem is shown in Table 4 with and . From Table 4, it is confirmed that scheme (4) converges at the root in fewer iterations and, hence, scheme (4) is better than (3). Notice that accelerated methods are vital for multivariable problems (see, e.g., [23]).
Table 4.
Solution for example 4 (B V P) using the proposed scheme.
5. Extraneous Fixed Points
The Newton-like iterative schemes described in earlier sections may be viewed as fixed-point iteration:
Clearly, the root of is a fixed point in the scheme. If the right side of (37) also vanishes at some points for , then is also a fixed point in the scheme. These fixed points are known as extraneous fixed points (see [2]). Now, we describe the extraneous fixed points of some Newton-like scheme for .
Remark 1.
Newton’s scheme does not have any extraneous fixed points as for Newton’s scheme,
Theorem 3.
The proposed scheme given by Equation (3) has 106 extraneous fixed points.
Proof.
For proposed scheme (3), is given by the following equation . In this equation, the numerator is of degree 106 and, hence, proposed scheme (3) has 106 extraneous fixed points.
These fixed points are repulsive since the magnitude of the derivative at these points is . □
Theorem 4.
The proposed scheme given by Equation (4) has 129 extraneous fixed points.
Proof.
For proposed scheme (4), given by the following equation. . In this equation, the numerator is of degree 129 and, hence, proposed scheme (4) has 129 extraneous fixed points.
Since the magnitude of the derivative at these points is , these fixed points are repulsive. □
Remark 2.
As the magnitude of the derivative at these points is , these fixed points are repulsive. These fixed points can be seen in the basins of attraction plot for example 3 (), Figure 2 (see Section 6.2).
6. Dynamics of Scheme
We studied the dynamics and fractal patterns of the functions in example 1 and example 2 ( ) by using proposed iterative schemes (3) and (4) along with Newton’s scheme. The dynamical analysis help us to study the convergence and stability of the schemes (see [6]).
6.1. For Example 1
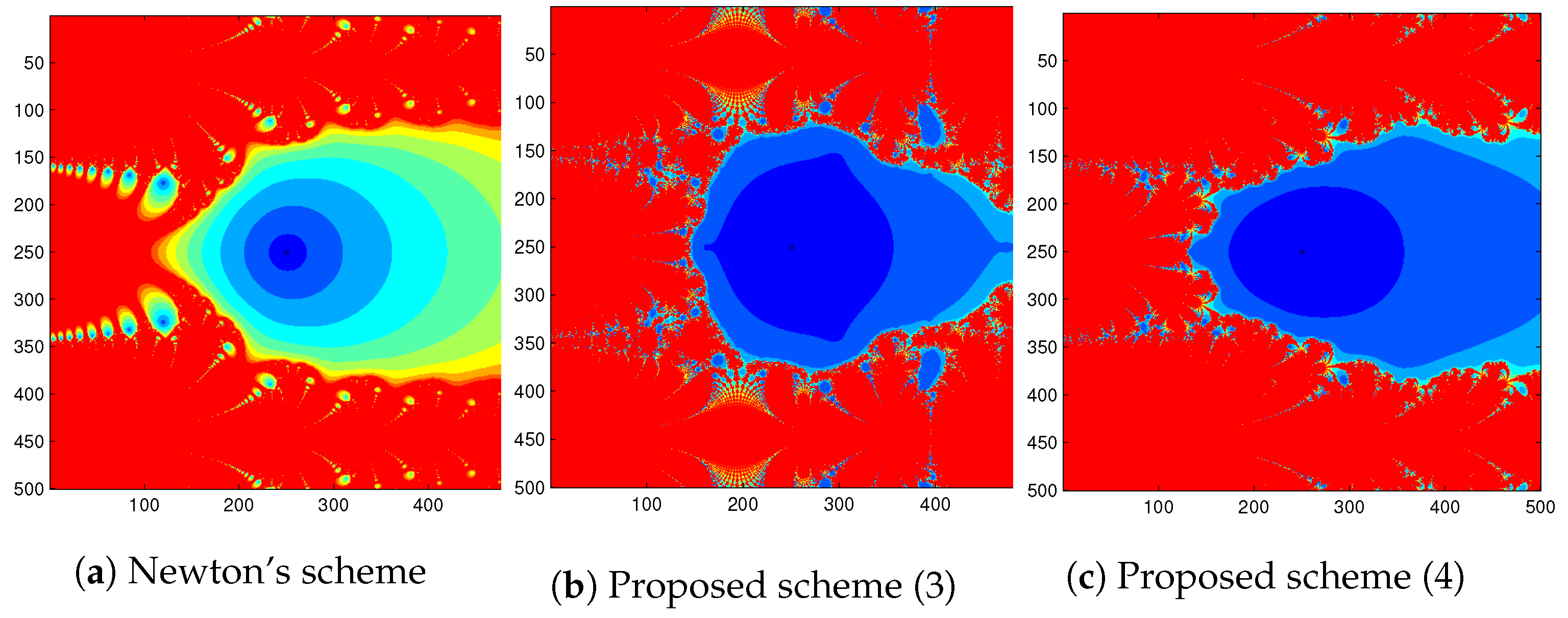
We considered a square of points with a tolerance- and a maximum of 11 iterations to study the dynamics of the function . We described the basins of attraction with a fixed color for the second-order Newton scheme, the ninth-order proposed scheme (3) and the ninth-order proposed scheme (4) for finding complex roots of the above-mentioned functions (Figure 1).
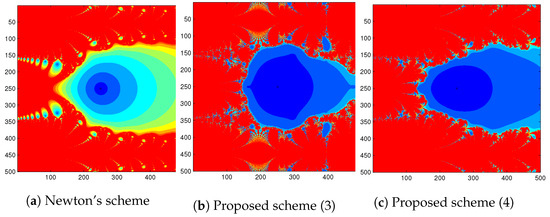
Figure 1.
Basin of attraction for with different schemes.
- 1.
- The basins for all the iterative schemes contain a fractal Julia set and the basins of all the schemes look almost similar.
- 2.
- The basins of attraction of the second-order Newton scheme contain a higher number of orbits and are less dark in comparison with the ninth-order schemes.
- 3.
- Again, the Fatou set with blue color shows the basins of the schemes. The blue-colored area shows that the proposed scheme (4) contains the Fatou set with bigger and darker orbits.
6.2. For Example 2
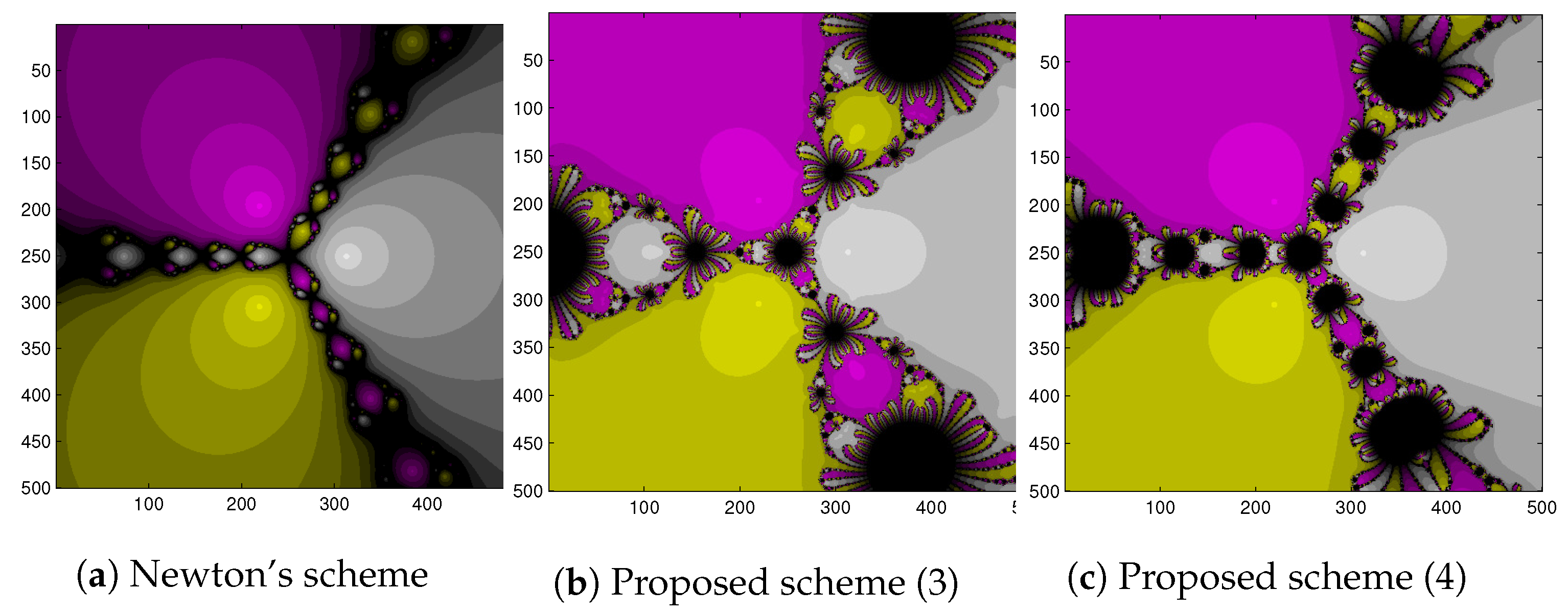
We plotted the fractal pattern graph of example 2 ( ) for the different iterative schemes under the same previous conditions with a different color fixed to each root of the basins of attraction.
The basins of attraction for schemes to find the complex roots of example 2 () are shown in Figure 2. We can see that there are no extraneous fixed points for the second-order Newton scheme, which is in agreement with the findings of the section Extraneous Fixed Points. Again, there are 106 extraneous fixed points for the proposed ninth-order scheme (3) and 129 extraneous fixed points for the proposed ninth-order scheme (4). Since, the magnitude of the derivative at these points is , these fixed points are repulsive. Thus, we see that scheme (3) is better in terms of extraneous fixed points.
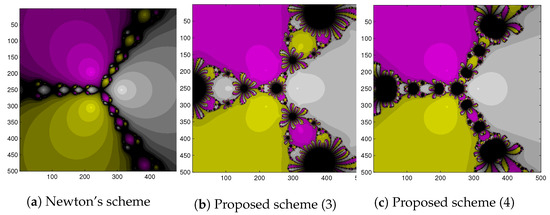
Figure 2.
Basin of attraction for with different schemes.
7. Convergence Radii
In the next two examples, we compute the convergence radii for proposed schemes (3) and (4).
Example 5.
By the example in the Section 1, conditions (A) are satisfied if we choose and Then, by solving the convergence radii, we have
and
Example 6.
Let and be the space of continuous functions on the interval with the max-norm and . Define by
Then, the Fréchet derivative is given as
for all . Then, conditions (A) are satisfied if we choose and
Then, we have
and
8. Conclusions
We developed two ninth-order Newton-like schemes for solving nonlinear equations in Banach space and discussed the ball convergence analysis for both of them. We performed a local convergence comparison with the use of only the first-order derivative. The study is used to prove the convergence for scheme (3) and scheme (4) under weak conditions, extending the usage of these schemes. Earlier work relies on the existence and boundedness of , which is not in these schemes. Thus, these results are not applicable in cases where these hypothesis are violated. However, these schemes may converge. We checked the theoretical results by using the numerical examples along with the boundary value problem. We also examined the numerical results with the basins of attraction for some selected examples. All the results (theoretical, numerical, dynamical) are generative for the advanced study of higher-order Newton-like schemes. The new approach is applicable in other schemes. This is revealing for our future research.
Author Contributions
Conceptualization, I.K.A., M.K.S. and S.R.; methodology, I.K.A., M.K.S. and S.R.; software, I.K.A., M.K.S. and S.R.; validation, I.K.A., M.K.S. and S.R.; formal analysis, I.K.A., M.K.S. and S.R.; investigation, I.K.A., M.K.S. and S.R.; resources, I.K.A., M.K.S. and S.R.; data curation, I.K.A., M.K.S. and S.R.; writing—original draft preparation, I.K.A., M.K.S. and S.R.; writing—review and editing, I.K.A., M.K.S. and S.R.; visualization, I.K.A., M.K.S. and S.R.; supervision, I.K.A., M.K.S. and S.R.; project administration, I.K.A., M.K.S. and S.R.; funding acquisition, I.K.A., M.K.S. and S.R. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Singh, M.K. A Six-order variant of Newton’s method for solving non linear equations. Comput. Meth. Sci. Technol. 2009, 15, 185–193. [Google Scholar] [CrossRef]
- Vrscay, E.R.; Gilbert, W.J. Extraneous fixed points, basin boundaries and chaotic dynamics for Schroder and Konig rational iteration functions. Numer. Math. 1987, 52, 1–16. [Google Scholar] [CrossRef]
- Wang, K.; Kou, J.; Gu, C. Semilocal convergence of a sixth-order jarrat method in Banach spaces. Numer. Algorithms 2011, 57, 441456. [Google Scholar] [CrossRef]
- Singh, M.K.; Singh, A.K. Variant of Newton’s Method Using Simpson’s 3/8th Rule. Int. J. Appl. Comput. 2020, 6, 20. [Google Scholar] [CrossRef]
- Argyros, I.K. Convergence and Applications of Newton-Type Iterations; Springer: Berlin, Germany, 2008. [Google Scholar]
- Argyros, I.K.; Magrenan, A.A. Iterative Methods and Their Dynamics with Applications: A Contemporary Study; Taylor and Francis: Boca Raton, FL, USA, 2017. [Google Scholar]
- Cordero, A.; Torregrosa, J.R. Variants of Newton’s method using fifth-order quadrature formulas. Appl. Math. Comput. 2007, 190, 686–698. [Google Scholar] [CrossRef]
- Grau-Sánchez, M.; Grau, A.; Noguera, M. On the computational efficiency index and some iterative methods for solving systems of nonlinear equations. J. Comput. Appl. Math. 2011, 236, 1259–1266. [Google Scholar] [CrossRef]
- Homeier, H.H.H. A modified Newton method with cubic convergence: The multivariable case. J. Comput. Appl. Math. 2004, 169, 161–169. [Google Scholar] [CrossRef]
- Homeier, H.H.H. On Newton-type methods with cubic convergence. J. Comput. Appl. Math. 2005, 176, 425–432. [Google Scholar] [CrossRef]
- Jarratt, P. Some fourth order multipoint iterative methods for solving equations. Math. Comput. 1996, 20, 434–437. [Google Scholar] [CrossRef]
- Kantorovich, L.V.; Akilov, G.P. Funtional Analysis; Pergamon Press: Oxford, UK, 1982. [Google Scholar]
- Xiao, X.Y.; Yin, H.W. Accelerating the convergence speed of iterative methods for solving nonlinear systems. Appl. Math. Compt. 2018, 333, 8–19. [Google Scholar] [CrossRef]
- Xiao, X.Y.; Yin, H. Achieving higher order of convergence for solving systems of nonlinear equations. Appl. Math. Compt. 2017, 311, 251–261. [Google Scholar] [CrossRef]
- Cordero, A.; Torregrosa, J.R. Variants of Newton’s method for functions of several variables. Appl. Math. Comput. 2006, 183, 199–208. [Google Scholar] [CrossRef]
- Sharma, J.R.; Guha, R.K.; Sharma, R. An efficient fourth order weighted-Newton method for systems of nonlinear equations. Numer. Algorithms 2013, 62, 307–323. [Google Scholar] [CrossRef]
- Noor, M.A.; Waseem, M. Some iterative methods for solving a system of nonlinear equations. Comput. Math. Appl. 2009, 57, 101–106. [Google Scholar] [CrossRef]
- Cordero, A.; Martínez, E.; Torregrosa, J.R. Iterative methods of order four and five for systems of nonlinear equations. J. Comput. Appl. Math. 2009, 231, 541–551. [Google Scholar] [CrossRef]
- Sharma, J.R.; Gupta, P. An efficient fifth order method for solving systems of nonlinear equations. Comput. Math. Appl. 2014, 67, 591–601. [Google Scholar] [CrossRef]
- Argyros, I.K. Computational Theory of Iterative Methods, Series: Studies in Computational Mathematics; Elsevier Publishing Company: New York, NY, USA, 2007. [Google Scholar]
- Xiao, X.Y.; Yin, H.W. A new class of methods with higher order of convergence for solving systems of nonlinear equations. Appl. Math. Comput. 2015, 264, 300–309. [Google Scholar] [CrossRef]
- Xiao, X.Y.; Yin, H.W. Increasing the order of convergence for iterative methods to solve nonlinear systems. Calcolo 2016, 53, 285–300. [Google Scholar] [CrossRef]
- Sandor, K. Optimizing single Slater determinant for electronic Hamiltonian with Lagrange multipliers and Newton-Raphson methods as an alternative to ground state calculations via Hartree-Fock self consistent field. AIP Conf. Proc. 2019, 2116, 450030. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).