Abstract
Rapid changes in forces and the resulting changes in acceleration, jerk and higher order derivatives can have undesired consequences beyond the effect of the forces themselves. Jerk can cause injuries in humans and racing animals and induce fatigue cracks in metals and other materials, which may ultimately lead to structure failures. This is a reason that it is used within standards for limits states. Examples of standards which use jerk include amusement rides and lifts. Despite its use in standards and many science and engineering applications, jerk is rarely discussed in university science and engineering textbooks and it remains a relatively unfamiliar concept even in engineering. This paper presents a literature review of the jerk and higher derivatives of displacement, from terminology and historical background to standards, measurements and current applications.
1. Introduction
Jerk—the time derivative of acceleration—is an important consideration for many applications in science and engineering. For example, jerk has long been used as a design factor to ensure ride comfort, e.g., in amusement rides [1,2,3,4,5,6,7], ships [8,9,10], lifts/elevators [11] and buses [12], and there are many reasons to believe that the relevance of jerk—and higher derivatives of displacement—will increase. A number of ISO standards also refer to jerk [13,14,15,16,17,18,19].
Displacement, velocity and acceleration are well known concepts for everyone who has studied physics at secondary level, whereas jerk—the time derivative of acceleration—and higher derivatives are rarely mentioned, let alone discussed, even in university physics or engineering textbooks. This omission was pointed out three decades ago by Sandin [20], who only found one reference to jerk [21] in a dozen reviewed text books. In addition, in an earlier article for university physics teachers [22], Schot presented the concept and also discussed the radial and tangential components of jerk. However, despite this early effort for jerk to be included in text books, jerk is not yet discussed in physics and engineering courses, except for a few textbooks [23,24,25]. The lack of detail in textbooks also contributes to some confusion concerning terminology.
Higher derivatives have been discussed by Thompson in a conference presentation [26], where he argued that since immediate acceleration onsets have a detrimental effect on equipment, acceleration should be ramped up by placing a limit on jerk. He then proposed an alternative strategy, claimed to be even better, which is ramping up jerk by placing a limit on its higher derivatives of snap, crackle and pop. However, the details of his studies are beyond the scope of this work.
Jerk and higher derivatives of acceleration are relevant for understanding the impact of motion and vibrations in a wide range of applications, as reviewed in this paper [1,2,3,4,5,6,7,8,9,10,11,12,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80,81,82,83,84,85,86,87,88,89,90,91,92,93,94,95,96,97,98,99,100,101,102,103,104,105,106,107,108,109,110,111,112,113,114,115,116,117,118,119,120,121,122,123,124,125,126,127,128,129,130,131,132,133,134,135,136,137,138,139,140,141,142,143,144,145,146,147,148,149,150,151,152,153,154,155,156,157,158,159,160,161,162,163,164,165,166,167,168,169,170,171,172,173,174,175,176,177,178,179,180,181,182,183,184,185,186,187,188,189,190,191,192,193,194,195]
The considerable interest is also reflected in the large number of downloads (>100,000) of a 2016 paper on jerk and higher derivatives [1].
To support secondary school teachers and university lecturers who would like to introduce the concept of jerk, as well as higher derivatives, in their science or engineering courses, we have conducted a thorough systematic review, from terminology and historical background to standards, measurements and current applications. The articles are divided, based on the applications of jerk, into twenty-one categories. Each article is ranked against where it is published using Scientific Journal Rankings (SJR)—Scimago index, from the quartiles Q1 to Q4, where Q1 is occupied by the top 25% of journals, Q2 by the top 25% to 50% and so on. We used N/A for thesis, reports, and conferences and journals where we were unable find any information with regards to their quality. Other sources are also included in the reference list. The rationale for including these sources is the scarcity of research on jerk. It is then the responsibility of the reader to evaluate the articles against their own objective. A number of papers have been included which use the concept of jerk, even if they don’t explicitly mention the term or only refer to it briefly.
Background
There is a limited number of good textbooks about the history of mechanics. The best are probably Szabo [196] (in German) and Dugas [197] (in French and translated into English [198]). Although these books contain a lot of interesting information, neither covers jerk or higher derivatives.
Newton’s second law of motion is commonly written as , i.e., “force equals mass times acceleration”, although Newton did not use the term acceleration in his equations but stated that the rate of change in momentum is equal to the applied force. The concept of acceleration was formalized by Pierre Varignon (1654–1722) [199]. Before the second world war German engineers, including Melchior [200] and Schlobach [201], pointed at applications of jerk for handheld machines.
One aspect that is frequently overlooked is terminology. By standardizing terminology, misunderstandings could be avoided, communication between scientists from different disciplines could be enabled, and searches on the global network would be facilitated. The term “jerk” for the first derivative of acceleration seems to be most widely used. However, alternative terms like “acceleration onset rate” are also used, e.g., Whinnery et al. [202], ISO 2041 [13] and a report by NASA [94].
The higher derivatives are less familiar, and different terminologies have been used by different groups. The term “jounce” is sometimes used to describe the fourth derivative of position, and in some Japanese articles it is referred to as “jerk-dot” [148,173,175].
In this work, we will use the more common terms “snap”, “crackle” and “pop” for the 4th–6th derivatives (named after pictorial characters on Kellogs’ Corn Flakes packages from the thirties). For the 7th–10th derivatives, the terms “lock”, “drop”, “shock” and “put” have been proposed informally, although we have been unable to find them in the literature.
2. Method
Articles in the period from 2015 to 2020 with the term “jerk” mentioned in the title were looked up in an electronic database (Scholar.google.com), excluding citations and patents. There were 550 results. The initial 550 articles was refined by excluding 129 based on title, non-English language and duplication. Of the remaining 421 articles, 147 articles were excluded in a more detailed subsequent assessment that included a review of the abstracts and conclusions, and their source, i.e., low-quality journals/conferences. Of the remaining 274 remaining articles, 139 articles that referred to jerk in the context of chaotic systems and nonlinear dynamics were excluded. Terms signaling this context include jerk system, hyper-jerk system, chaotic jerk-system, jerk attractors, jerk circuit, jerk dynamics, jerk map, jerk function, jerk oscillators and jerk equations, and traffic jerk model (n = 17) articles that used jerk in the context of weightlifting were removed, since this refers to a weightlifting technique rather than the jerk itself.
In addition to the articles emerging from this database search, the authors were aware of 84 articles before 2015, as well as articles where jerk was not mentioned in the title. These articles have been included in the review. The inclusion-exclusion criteria flow chart is given in Figure 1.
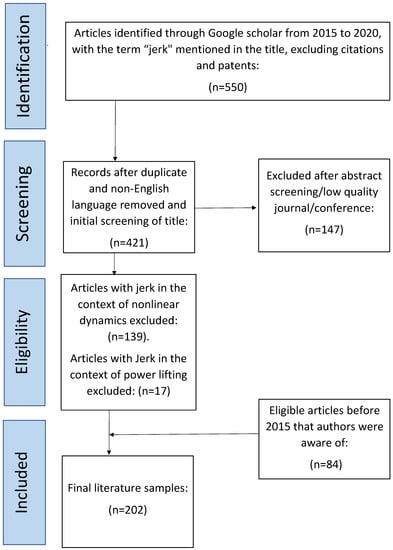
Figure 1.
Systematic review ‘inclusion-exclusion criteria’ flow chart.
After reviewing the collected literature (n = 202) and those articles that the author were aware of, the applications of jerk were categorised into 20 categories.
Categorisation of Jerk Applications
The 21 jerk categories chosen with their respective references were:
- Jerk in advanced manufacturing [27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80,81,82,83,84,85,86,87,88,89,90];
- Jerk in amusement rides [1,2,3,4,5,6,7,14];
- Jerk in cosmology and space technology [91,92,93,94];
- Jerk in criteria for discomfort [1,4,5,9,10,12,19,25,95,96,97,98,99,100,101,102,103,104,105,106,107,108,109,110,111,112,113,114,115,116,117,118,119,120,121,122,123,124,125,126,127,128,129,130,131];
- Jerk in equation of motion [132,133,134,135,136];
- Jerk in global positioning systems (GPS) [137,138];
- Jerk in human tolerance [202,203];
- Jerk in kinesiology [139,140,141,142,143,144,145,146,147];
- Jerk in measurement [148,149,150,151];
- Jerk in motion analysis [152,153];
- Jerk in ornithology [154];
- Jerk in racing [155,156,157,158,159,160];
- Jerk in sea-keeping [8,9,10,122,126,204];
- Jerk in seismic analysis [134,161,162,163,164,165,166,167,168,169,170];
- Jerk in shock response spectrum [8,205];
- Jerk in sport science [1,171,172];
- Jerk in standards [13,14,15,16,17,18,19]
- Jerk in structural health monitoring [173,174,175,176];
- Jerk in technical pain [177];
- Jerk in unmanned aerial vehicle (UAV) [11,178,179,180,181,182,183,184,185,186]; and
- Jerk in vehicles (ride comfort [12,15,17,19,25,45,95,98,99,100,101,102,103,104,105,106,108,109,111,112,113,115,118,119,120,121,123,124,125,127,128,129,130,131], anti-jerk controller design [95,98,99,100,101,102,109,111,119,120,130], autonomous vehicles [12,16,114,123,187,188], and other [111,187,189,190,191,192,193,194,195].
The next section presents brief summaries of the papers in the different categories.
3. Results and Discussion
3.1. Jerk in Advanced Manufacturing
Jerk in advanced manufacturing can be categorised into jerk in industrial robots [27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63], machining [64,65,66,67,68,69,70,71,72,73,74,75,76,77,78], motors [79,80,81,82,83], and 3D printers [84,85,86,87,88,89,90].
3.1.1. Jerk in Industrial Robots
Jerk is mainly used to generate smooth trajectories in industrial robots (also referred to as manipulators) [27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63]. It is outside the scope and purpose of this paper to explain the jerk-controller. Details (author, source, SJR ranking and the title) of the Q1 articles are tabulated in Table 1.

Table 1.
Jerk in industrial robots.
As mentioned above, all of the cited reference used jerk as a limit for generating or controlling a smooth motion.
3.1.2. Jerk in 3D Printers
In recent years, jerk has been used in 3D printers [84,85,86,87,88,89,90]. One important consideration in 3D printing is that the term jerk, in the majority of 3D firmware, is defined in terms of the maximum “instantaneous” velocity change without consideration of the time required [84,90].
Inconsistent terminology causes confusion and needs to be addressed in the future. Notwithstanding, in an article on 3D printing by Hernandez [86], the actual jerk was considered (see Table 2).
Table 2.
Jerk in 3D printers.
3.1.3. Jerk in Machining
Jerk is recently used in generating smooth trajectories in machining [64,65,66,67,68,69,70,71,72,73,74,75,76,77,78]. Details of Q1 articles are tabulated in Table 3.
Table 3.
Jerk in machining.
3.1.4. Jerk in Motors
Jerk is also used in motors mostly a as a measure to control/generate smooth trajectories [79,80,81,82,83] (Table 4).
Table 4.
Jerk in motors.
3.2. Jerk in Amusement Rides
Jerk is rarely mentioned in textbooks but is quite an important physical parameter, as we quite often experience it in daily life. One important aspect of jerk is that jerk is an element in the comfort and safety of amusement rides, as well as reducing the need for equipment maintenance (Table 5).
Table 5.
Jerk in amusement rides.
3.3. Jerk in Cosmology and Space Technology
Jerk is used in cosmology as well as space technology. Details of articles which were eligible based on the inclusion criteria of the current work are given in Table 6.
Table 6.
Jerk in Cosmology and space technology.
3.4. Jerk in Criteria for Discomfort
Ride comfort is an important parameter in amusement rides [1,4,5], sea-keeping [9,10,122,126] and traditional land-based vehicles [12,25,45,95,98,99,100,101,102,103,104,105,106,108,109,111,112,113,115,118,119,120,121,123,124,125,127,128,129,130,131]. There are still discussions ongoing regarding the significance of jerk regarding ride comfort for vehicles, and jerk is probably a better measure for driving comfort than acceleration, as pointed out by van Santen [128] and confirmed, e.g., in the study by Grant and Haycock [107]. Jerk monitoring also offers insurance companies a way to follow up the behaviour of drivers, as a basis for car insurance pricing [195].
The Dutch institutes TNO and MARIN have initiated a joint project to study the impact of jerk on the comfort of passengers in a master thesis conducted by Werkman [10]. Details of this work are given in Section 3.4.2 of this paper.
Förstberg [104] investigated ride comfort and motion sickness in trains. The results indicated that “it is motion dose from horizontal jerk or horizontal acceleration as well as roll acceleration or roll velocity that is the primary causes of provocation.” Unfortunately, Förstberg passed away shortly after presenting his thesis.
Svensson and Ericsson [123] referred to concrete jerk values from American Association of State Highway and Transportation Official Standards (AASHTO; 2001) [206] in their master thesis. A value of lateral jerk ranging from 0.03 to 0.09 g/s has been used for highway design. Jia [25] claims that the jerk should be below 0.2 g/s in trains for passenger comfort. Martin and Litwhiler [118] investigated acceleration and jerk profiles in the metro-rail system in Washington DC and found jerk peaks of around 1.3 g/s.
Minimising the discomfort experienced during a journey between two points with the fixed travel time was studied by Anderson et al. [96]. They proposed jerk as a discomfort criteria. Their work was then revisited by Antonelli and Klotz [97] and Lemos [116] one and three years later, respectively. The jerk is proposed as a discomfort criteria. Antonelli and Klotz (2017) [97] and Lemos (2019) [116], commented on this work and mentioned that the integral of the square of acceleration and the integral of square of jerk should be considered as criteria for discomfort.
3.4.1. Jerk in Ride Comfort: Amusement Rides
Jerk is used as a ride comfort measure in amusement rides [1,4,5]. Details of studies mentioning jerk as a ride comfort parameter in amusement rides are given in Section 3.2, Table 5.
3.4.2. Jerk in Ride Comfort: Sea-Keeping
Jerk is used a ride comfort measure in sea-keeping [9,10,122,126]. Details of these studies are given in below Table 7.
Table 7.
Jerk as a criteria for discomfort: sea-keeping.
3.4.3. Jerk in Ride Comfort: Vehicles
Jerk has been used as a measure of ride comfort in vehicle engineering [9,10,122,126] and vehicle land-based traditional [12,25,45,95,98,99,100,101,102,103,104,105,106,108,109,111,112,113,115,118,119,120,121,123,124,125,127,128,129,130,131]. Details of studies in Q1–Q4 journals are given in Table 8.
Table 8.
Jerk as a criteria for discomfort: vehicles.
3.5. Jerk in Equation of Motion (EOM)
Jerk is proposed to be used in the EOM, and details of studies explored this can be found in Table 9. The idea has been discussed earlier but, to date, no concrete examples where someone claims that adding higher-order derivatives might explain the discrepancies between theory and observations, have been seen.
Table 9.
Jerk in EOM.
3.6. Jerk in GPS Applications
The following articles discussed use of jerk in Global Positioning Systems (GPS), mainly those types that should perform in harsh dynamic conditions such as satellite launch vehicles (Table 10).
Table 10.
Jerk in GPS application.
3.7. Jerk in Human Tolerance
Details of works studying human tolerance to jerk are given in Table 11.
Table 11.
Jerk in human tolerance.
3.8. Jerk In Kinesiology
Jerk has been used in different kinesiologies in different fields of clinical studies in sport science. Below, those works which studied jerk in kinesiology for different applications [139,140,141,142,143,144,145,146,147] have been captured (Table 12).
Table 12.
Jerk in kinesiology.
Recently, jerk has gained interest in non-clinical trials. For instance, in a recent study by Zhang [145,146,147], jerk was used as a measure to detect fatigue in workers.
3.9. Jerk in Measurement
Jerk is normally measured indirectly by calculating the derivative of acceleration, which is measured by accelerometers. Below, those studies that developed a device to measure jerk are tabulated (Table 13).
Table 13.
Jerk in measurement.
3.10. Jerk in Motion Analysis
In motion analysis application, jerk is used as s measure in machine learning classifiers [152,153] (Table 14).
Table 14.
Jerk in motion analysis.
3.11. Jerk in Ornithology
Ornithology is a branch of zoology which deals with birds. jerk has been used in one of the recent studies in this area, details of which are given in Table 15.
Table 15.
Jerk in ornithology.
3.12. Jerk in Greyhound Racing
One of the interesting applications (refer to Table 16) of jerk is in high-speed sprint racing, such as greyhound racing. Recent articles on racing greyhounds, mainly the one in Nature’s Scientific Report [160], clearly show its importance.
Table 16.
Jerk in greyhound racing.
3.13. Jerk in Sea-Keeping
Jerk in sea-keeping is considered in both passengers’ ride comfort and analysing shock spectrum in high-speed crafts [8,9,10,122,126,204] (Table 17).
Table 17.
Jerk in sea-keeping.
3.14. Jerk in Seismic Analysis
Seismic analysis is a subset of structural analysis and is the calculation of the response of a building structure to earthquakes. It is part of the process of structural design, earthquake engineering or structural assessment and retrofit in regions where earthquakes are prevalent [134,161,162,163,164,165,166,167,168,169,170] (Table 18).
Table 18.
Jerk in seismic analysis.
3.15. Jerk in Shock Response Spectrum
Equipment that is delivered to naval ships needs to be shockproof. The basic philosophy is that the equipment should withstand the same explosions as the ship itself (it would be unfortunate if the ship survived the blast, while it were impossible to operate since all equipment has been destroyed). Preferably, the shock-proofness of the equipment should be verified both theoretically and experimentally.
There are essentially three methods for theoretical verification, including:
- Static calculation, where you assume inertia forces of the mass times g in various directions;
- Calculation with shock response spectrum;
- Integration in the time domain.
Static calculations are easiest to carry out. In these calculations, neither the shape of the time history of the shock (e.g., blast or earthquake) nor the dynamic properties of the equipment under consideration (e.g., resonance frequencies) are taken into account. This means that you should normally have a considerable safety margin.
The shock response spectrum was invented by the Flemish-American engineer Maurice Anthony Binot (1905–1985). The basic idea is to draw a diagram that shows the maximum acceleration and relative displacement for a number of single-mass oscillators with various eigen frequencies for a certain shock time history. Normally, a simplified curve is drawn that might be an envelope for several time histories. This curve can be used to calculate the maximum amplitude for each eigenmode of the real equipment, and finally the contributions of each eigenmode can be added. There are different ways to add the contributions from the eigenmodes depending on how cautious you are. The very conservative approach is that you assume that, at some point in time, all the contributions of the eigenmodes are pointing in the same direction. This curve can not be used for testing, so a new time history curve has to be synthesised as input to that activity. It is out of the scope of this article to discuss details of this method, but it is interesting to point out that in these calculations jerk, etc., are implicitly taken into account.
The most straightforward method to carry out shock calculations is by integration in the time domain. Since the calculations are based on the time history, the derivatives of the acceleration are implicitly taken into account. The time history can, of course, directly be used as input to the test activity and comparison between calculations and measurements should be straightforward. The main drawback of this method is that it consumes a lot of computer power.
Studies that studied jerk in shock responses are listed in Table 19.
Table 19.
Jerk in shock response spectrum.
3.16. Jerk in Sport Science
Sport science is a general term which can include the science behind designing running shoes and studying the impact attenuation properties of greyhound’s surface. Those articles that passed the inclusion criteria of this work are tabulated in Table 20.
Table 20.
Jerk in sport science.
3.17. Jerk in Structural Health Monitoring
Vibration monitoring is another challenging area, e.g., it would be beneficial to be able to be able to identify the wear on gearboxes of wind power stations in due time. However, the application of higher-order derivatives of acceleration for damage detection requires further investigation. Using jerk as one parameter to be monitored has been suggested, e.g., by Zhang et al. (2012) [174] (Table 21).
Table 21.
Jerk in structural health monitoring.
3.18. Jerk in Technical Pain
Jerk was used to expand the understanding of researcher of sensed pain via a pain sensor where jerk was used as a biometric measure (Table 22).
Table 22.
Jerk in technical pain.
3.19. Jerk in UAV
Jerk, and even higher derivatives of it (aka jounce/snap), have been recently used in designing, testing and controlling UAVs [11,178,179,180,181,182,183,184,185,186] (Table 23).
Table 23.
Jerk in UAV.
3.20. Jerk in Vehicles-Land Based Traditional
Jerk in vehicles is mainly used for measuring the ride comfort [12,25,45,95,98,99,100,101,102,103,104,105,106,108,109,111,112,113,115,118,119,120,121,123,124,125,127,128,129,130,131]. It is also used as a controller design, referred to as an anti-jerk controller design [95,98,99,100,101,102,109,111,119,120,130]. Jerk is also used in autonomous vehicles [12,114,123,187,188], which is explained in the below sections.
3.20.1. Jerk in Vehicles: Ride Comfort
One of the main applications of jerk in vehicles is as criteria for discomfort. Details of these studies were given in Table 7.
3.20.2. Jerk in Vehicles: Autonomous Vehicles
Jerk in autonomous driving is used to evaluate the comfortable ride and safety of the passengers [12,114,123,187,188] (Table 24).
Table 24.
Jerk in autonomous vehicles.
4. Conclusions
The purpose of this work was to show the importance of jerk in the context of science and engineering, by conducting a thorough systematic review of recent academic articles (2015–2020) where the term ‘jerk’ was mentioned in the title. The quality of papers was assessed based on Scientific Journal Rankings (SJR)—Scimago index, from the quartiles Q1 to Q4, where Q1 is occupied by the top 25% of journals, Q2 by the top 25% to 50%, and so on. The articles were then categorised based on the application of jerk in twenty categories. The result of this systematic review showed that, although jerk is overlooked in secondary and higher education, jerk is ubiquitous. Road, rail and sea all have examples of a jerk, from crack initiation to ride comfort. Traditional printing and 3D-printing control systems all contain examples of a jerk. This review has provided a solid foundation for future research on the importance of jerk in different fields. It has identified research gaps which will assist researchers in creating a concise road map toward a more comprehensive study on jerk. The authors also emphasize that jerk is still essentially overlooked in secondary and higher education. This review provides support for teachers and textbook authors who may wish to include examples of jerk in their lessons and textbooks.
Jerk is all around as if we care to listen, feel, open our eyes and observe—from greyhound tracks to roller coasters.
Author Contributions
H.A. performed an initial literature search, including historical sources, and also followed up on some references in more detail through contacts with authors. A.-M.P. and D.E., following a collaboration of jerk in trampolines and roller coasters, initiated the research into jerk with a STEM educational context. D.E. suggested a more systematic literature review. H.H. did most of the searching, categorization and writing Conceptualization, H.H., D.E., A.-M.P. and H.A.; methodology, H.H. and D.E.; validation, H.H., D.E., A.-M.P. and H.A.; formal analysis, D.E., A.-M.P. and H.A.; investigation, H.H. and H.A.; resources, D.E.; data curation, H.H.; writing—original draft preparation, H.H. and H.A.; writing—review and editing, H.H., D.E., A.-M.P. and H.A.; visualization, H.H., D.E., A.-M.P. and H.A.; supervision, D.E.; project administration, H.H.; funding acquisition, D.E. All authors have read and agreed to the published version of the manuscript.
Funding
The work is funded by Greyhound Racing New South Wales with UTS institution reference of PRO17-3051.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Eager, D.; Pendrill, A.M.; Reistad, N. Beyond velocity and acceleration: Jerk, snap and higher derivatives. Eur. J. Phys. 2016, 37, 65–68. [Google Scholar] [CrossRef]
- Pendrill, A.M. Rollercoaster loop shapes. Phys. Educ. 2005, 40, 517. [Google Scholar] [CrossRef]
- Gierlak, P.; Szybicki, D.; Kurc, K.; Burghardt, A.; Wydrzyński, D.; Sitek, R.; Goczał, M. Design and dynamic testing of a roller coaster running wheel with a passive vibration damping system. J. Vibroeng. 2018, 20, 1129–1143. [Google Scholar] [CrossRef]
- Sicat, S.; Woodcock, K.; Ferworn, A. Wearable Technology for Design and Safety Evaluation of Rider Acceleration Exposure on Aerial Adventure Attractions. In Proceedings of the Annual Occupational Ergonomics and Safety Conference, Pittsburgh, PA, USA, 7–8 June 2018. [Google Scholar]
- Vaisanen, A. Design of Roller Coasters. Master’s Thesis, Aalto University, Espoo, Finland, 2018. [Google Scholar]
- Pendrill, A.M.; Eriksson, M.; Eriksson, U.; Svensson, K.; Ouattara, L. Students making sense of motion in a vertical roller coaster loop. Phys. Educ. 2019, 54, 065017. [Google Scholar] [CrossRef]
- Pendrill, A.M.; Eager, D. Velocity, acceleration, jerk, snap and vibration: Forces in our bodies during a roller coaster ride. Phys. Educ. 2020, 55, 065012. [Google Scholar] [CrossRef]
- Coats, T.W.; Haupt, K.D.; Murphy, H.P.; Ganey, N.C.; Riley, M.R. A Guide for Measuring, Analyzing, and Evaluating Accelerations Recorded During Seakeeping Trials of High-Speed Craft; Report; Naval Surface Warfare Center Carderock Division: Norfolk, VA, USA, 2016.
- Sosa, L.; Ooms, J. A Comfort Analysis of an 86 m Yacht Fitted with Fin Stabilizers Vs. Magnus-Effect Rotors; Report; The Society of Naval Architects and Marine Engineers: Alexandria, VA, USA, 2016. [Google Scholar]
- Werkman, J. Determining and Predicting the Seakeeping Performance of Ships Based on Jerk in the Ship Motions. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2019. [Google Scholar]
- Nemes, A.; Mester, G. Energy Efficient Feasible Autonomous Multi-Rotor Unmanned Aerial Vehicles Trajectories. In Proceedings of the 4th International Scientific Conference on Advances in Mechanical, Engineering, Debrecen, Hungary, 13–15 October 2016; pp. 369–376. [Google Scholar]
- Bae, I.; Moon, J.; Seo, J. Toward a Comfortable Driving Experience for a Self-Driving Shuttle Bus. Electronics 2019, 8, 943. [Google Scholar] [CrossRef]
- ISO-2041 Mechanical Vibration, Shock and Condition Monitoring—Vocabulary; Standard; International Organization for Standardization: Geneva, Switzerland, 2009.
- ISO/TC 17929 Biomechanical Effects on Amusement Ride Passengers; Standard; International Organization for Standardization: Geneva, Switzerland, 2014.
- ISO 11026 Heavy Commercial Vehicles and Buses—Test Method for Roll Stability—Closing-Curve Test; Standard; International Organization for Standardization: Geneva, Switzerland, 2010.
- ISO 15623 Intelligent Transport Systems—Forward Vehicle Collision Warning Systems—Performance Requirements and Test Procedures; Standard; International Organization for Standardization: Geneva, Switzerland, 2013.
- ISO 18737-1: Measurement of Ride Quality—Part 1: Lifts (Elevators); Standard; International Organization for Standardization: Geneva, Switzerland, 2012.
- ISO/TS 14649-201: Industrial Automation and Integration—Physical Device Control—Data Model for Computerized Numerical Controllers—Part 201: Machine Tool Data for Cutting Processes; Standard; International Organization for Standardization: Geneva, Switzerland, 2012.
- ISO 25745-2: Energy Performance of Lifts, Escalators and Moving Walks—Part 2: Energy Calculation and Classification for Lifts (Elevators); Standard; International Organization for Standardization: Geneva, Switzerland, 2015.
- Sandin, T. The jerk. Phys. Teach. 1990, 28, 36–40. [Google Scholar] [CrossRef]
- Sears, F.W.; Zemansky, M.W.; Young, H.D. University Physics; Addison-Wesley: Boston, MA, USA, 1987. [Google Scholar]
- Schot, S.H. Jerk: The time rate of change of acceleration. Am. J. Phys. 1978, 46, 1090–1094. [Google Scholar] [CrossRef]
- Lalanne, C. Mechanical Vibration and Shock Analysis, Fatigue Damage; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Smith, J.D. Vibration Measurement and Analysis; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Jia, J. Essentials of Applied Dynamic Analysis; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Thompson, P.M. Snap crackle and pop. In Proceedings of the AIAA Southern California Aerospace Systems and Technology Conference, Hawthorne, CA, USA, 2011; Available online: http://www.justuslearning.com/wp-content/uploads/2013/12/AIAAOC_SnapCracklePop_docx.pdf (accessed on 21 October 2020).
- Besset, P.; Béarée, R. FIR filter-based online jerk-constrained trajectory generation. Control Eng. Pract. 2017, 66, 169–180. [Google Scholar] [CrossRef]
- Bianco, C.G.L.; Ghilardelli, F. A scaling algorithm for the generation of jerk-limited trajectories in the operational space. Robot. Comput.-Integr. Manuf. 2017, 44, 284–295. [Google Scholar] [CrossRef]
- Chen, S.L.; Li, X.; Teo, C.S.; Tan, K.K. Composite jerk feedforward and disturbance observer for robust tracking of flexible systems. Automatica 2017, 80, 253–260. [Google Scholar] [CrossRef]
- Chen, D.; Li, S.; Li, W.; Wu, Q. A multi-level simultaneous minimization scheme applied to jerk-bounded redundant robot manipulators. IEEE Trans. Autom. Sci. Eng. Comput. 2019, 17, 463–474. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, Y. Minimum jerk norm scheme applied to obstacle avoidance of redundant robot arm with jerk bounded and feedback control. IET Control Theory Appl. 2016, 10, 1896–1903. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, Y. Jerk-level synchronous repetitive motion scheme with gradient-type and zeroing-type dynamics algorithms applied to dual-arm redundant robot system control. Int. J. Syst. Sci. 2017, 48, 2713–2727. [Google Scholar] [CrossRef]
- Dai, C.; Lefebvre, S.; Yu, K.M.; Geraedts, J.M.; Wang, C.C. Planning Jerk-Optimized Trajectory With Discrete Time Constraints for Redundant Robots. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1711–1724. [Google Scholar] [CrossRef]
- Dong, H.; Cong, M.; Liu, D.; Wang, G. An effective technique to find a robot joint trajectory of minimum global jerk and distance. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 1327–1330. [Google Scholar]
- Duan, H.; Zhang, R.; Yu, F.; Gao, J.; Chen, Y. Optimal trajectory planning for glass-handing robot based on execution time acceleration and jerk. J. Robot. 2016, 2016, 9329131. [Google Scholar] [CrossRef]
- Feifei, L.; Fei, L. Time-jerk optimal planning of industrial robot trajectories. Int. J. Robot. Autom. 2016, 31, 1–7. [Google Scholar] [CrossRef]
- Glorieux, E.; Svensson, B.; Danielsson, F.; Lennartson, B. Simulation-based time and jerk optimisation for robotic press tending. In Proceedings of the 29th European Simulation and Modelling Conference, EUROSIS, Leicester, UK, 7–8 October 2015; pp. 377–384. [Google Scholar]
- Huang, J.; Hu, P.; Wu, K.; Zeng, M. Optimal time-jerk trajectory planning for industrial robots. Mech. Mach. Theory 2018, 121, 530–544. [Google Scholar] [CrossRef]
- Jiang, L.; Lu, S.; Gu, Y.; Zhao, J. Time-Jerk Optimal Trajectory Planning for a 7-DOF Redundant Robot Using the Sequential Quadratic Programming Method. In International Conference on Intelligent Robotics and Applications; Springer: Berlin/Heidelberg, Germany, 2017; pp. 343–353. [Google Scholar]
- Kaserer, D.; Gattringer, H.; Müller, A. Online Robot-Object Synchronization With Geometric Constraints and Limits on Velocity, Acceleration, and Jerk. IEEE Robot. Autom. Lett. 2018, 3, 3169–3176. [Google Scholar] [CrossRef]
- Kaserer, D.; Gattringer, H.; Müller, A. Nearly optimal path following with jerk and torque rate limits using dynamic programming. IEEE Trans. Robot. 2018, 35, 521–528. [Google Scholar] [CrossRef]
- Lange, F.; Albu-Schäffer, A. Path-accurate online trajectory generation for jerk-limited industrial robots. IEEE Robot. Autom. Lett. 2015, 1, 82–89. [Google Scholar] [CrossRef]
- Lange, F.; Suppa, M. Trajectory generation for immediate path-accurate jerk-limited stopping of industrial robots. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2021–2026. [Google Scholar]
- Lange, F.; Suppa, M. Trajectory Generation for Path-Accurate Jerk-Limited Sensor-Based Path Corrections of Robot Arms. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; p. 4087. [Google Scholar]
- Liu, L.; Chen, C.; Zhao, X.; Li, Y. Smooth trajectory planning for a parallel manipulator with joint friction and jerk constraints. Int. J. Control Autom. Syst. 2016, 14, 1022–1036. [Google Scholar] [CrossRef]
- Lu, S.; Li, Y. Minimum-Jerk Trajectory Planning of a 3-DOF Translational Parallel Manipulator. In Proceedings of the ASME 2015 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Boston, MA, USA, 2–5 August 2015. [Google Scholar]
- Lu, S.; Ding, B.; Li, Y. Minimum-jerk trajectory planning pertaining to a translational 3-degree-of-freedom parallel manipulator through piecewise quintic polynomials interpolation. Adv. Mech. Eng. 2020, 12, 1687814020913667. [Google Scholar] [CrossRef]
- Lu, S.; Zhao, J.; Jiang, L.; Liu, H. Solving the time-jerk optimal trajectory planning problem of a robot using augmented lagrange constrained particle swarm optimization. Math. Probl. Eng. 2017, 2017. [Google Scholar] [CrossRef]
- Palleschi, A.; Garabini, M.; Caporale, D.; Pallottino, L. Time-Optimal Path Tracking for Jerk Controlled Robots. IEEE Robot. Autom. Lett. 2019, 4, 3932–3939. [Google Scholar] [CrossRef]
- Park, B.J.; Lee, H.J.; Oh, K.K.; Moon, C.J. Jerk-Limited Time-Optimal Reference Trajectory Generation for Robot Actuators. Int. J. Fuzzy Log. Intell. Syst. 2017, 17, 264–271. [Google Scholar] [CrossRef]
- Rezaeifar, H.; Najafi, F. Path planning using via-points and Jerk-minimum method with static obstacles for a 7 DOF manipulator. Modares Mech. Eng. 2015, 15, 153–163. [Google Scholar]
- Rojas, R.A.; Garcia, M.A.R.; Wehrle, E.; Vidoni, R. A Variational Approach to Minimum-Jerk Trajectories for Psychological Safety in Collaborative Assembly Stations. IEEE Robot. Autom. Lett. 2019, 4, 823–829. [Google Scholar] [CrossRef]
- Rout, A.; Dileep, M.; Mohanta, G.B.; Deepak, B.; Biswal, B. Optimal time-jerk trajectory planning of 6 axis welding robot using TLBO method. Procedia Comput. Sci. 2018, 133, 537–544. [Google Scholar] [CrossRef]
- Rout, A.; Mohanta, G.B.; Gunji, B.M.; Deepak, B.; Biswal, B.B. Optimal time-jerk-torque trajectory planning of industrial robot under kinematic and dynamic constraints. In Proceedings of the 2019 9th Annual Information Technology, Electromechanical Engineering and Microelectronics Conference (IEMECON), Jaipur, India, 13–15 March 2015; pp. 36–42. [Google Scholar]
- Shi, X.; Fang, H.; Guo, W. Time-Energy-Jerk Optimal Trajectory Planning of Manipulators Based on Quintic NURBS. Mach. Des. Res. 2017, 2017, 45. [Google Scholar] [CrossRef]
- Shi, X.L.; Fang, H.G. Time-Energy-Jerk Optimal Planning of Industrial Robot Trajectories. Mach. Des. Manuf. 2018, 66. [Google Scholar] [CrossRef]
- Shimada, N.; Yoshioka, T.; Ohishi, K.; Miyazaki, T.; Yokokura, Y. Variable dynamic threshold of jerk signal for contact detection in industrial robots without force sensor. Electr. Eng. Jpn. 2015, 193, 43–54. [Google Scholar] [CrossRef]
- Wang, P.; Yang, H.; Xue, K. Jerk-optimal trajectory planning for stewart platform in joint space. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015; pp. 1932–1937. [Google Scholar]
- Yue, S.; Yinya, L.; Guoqing, Q.; Andong, S. Time-jerk Optimal Trajectory Planning for Industrial Robots Based on PSO Algorithm. Comput. Meas. Control 2017, 2017, 45. [Google Scholar]
- Zeeshan, M.; Xu, H. Jerk-Bounded Trajectory Planning of Industrial Manipulators. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 1089–1096. [Google Scholar]
- Zhang, D.; Wu, F.; Li, R. Time-optimal and minimum-jerk trajectory planning of 3-DOF PM spherical motor. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; pp. 1843–1847. [Google Scholar]
- Zhang, Y.; Yang, M.; Qiu, B.; Luo, J.; Tan, H. Jerk-level solutions to manipulator inverse kinematics with mathematical equivalence of operations discovered. In Proceedings of the 2016 12th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD), Changsha, China, 13–15 August 2016; pp. 2121–2126. [Google Scholar]
- Zhao, R.; Sidobre, D. Trajectory smoothing using jerk bounded shortcuts for service manipulator robots. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 4929–4934. [Google Scholar]
- Zhang, L.; Du, J. Acceleration smoothing algorithm based on jounce limited for corner motion in high-speed machining. Int. J. Adv. Manuf. Technol. 2018, 95, 1487–1504. [Google Scholar] [CrossRef]
- Alzaydi, A. Time-optimal, minimum-jerk, and acceleration continuous looping and stitching trajectory generation for 5-axis on-the-fly laser drilling. Mech. Syst. Signal Process. 2019, 121, 532–550. [Google Scholar] [CrossRef]
- Besset, P.; Béarée, R.; Gibaru, O. FIR filter-based online jerk-controlled trajectory generation. In Proceedings of the 2016 IEEE International Conference on Industrial Technology (ICIT), Taipei, Taiwan, 14–17 March 2016; pp. 84–89. [Google Scholar]
- Bosetti, P.; Ragni, M. Milling Part Program Preprocessing for Jerk-limited, Minimum-time Tool Paths Based on Optimal Control Theory. IEEJ J. Ind. Appl. 2016, 5, 53–60. [Google Scholar] [CrossRef]
- Dumanli, A.; Sencer, B. Optimal high-bandwidth control of ball-screw drives with acceleration and jerk feedback. Precis. Eng. 2018, 54, 254–268. [Google Scholar] [CrossRef]
- Hashemian, A.; Bo, P.; Bartoň, M. Reparameterization of ruled surfaces: Toward generating smooth jerk-minimized toolpaths for multi-axis flank CNC milling. Comput.-Aided Des. 2020, 127, 102868. [Google Scholar] [CrossRef]
- Huang, J.; Zhu, L.M. Feedrate scheduling for interpolation of parametric tool path using the sine series representation of jerk profile. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2017, 231, 2359–2371. [Google Scholar] [CrossRef]
- Li, H.; Wu, W.J.; Rastegar, J.; Guo, A. A real-time and look-ahead interpolation algorithm with axial jerk-smooth transition scheme for computer numerical control machining of micro-line segments. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2019, 233, 2007–2019. [Google Scholar] [CrossRef]
- Lin, M.T.; Yu, N.T.; Chiu, W.T.; Lee, C.Y.; Lu, Y.M. A master-axis-based feedrate scheduling with jerk constraints for five-axis tool center point trajectory. In Proceedings of the 2015 IEEE International Conference on Automation Science and Engineering (CASE), Gothenburg, Sweden, 24–28 August 2015; pp. 111–116. [Google Scholar]
- Mutlu, M.K.; Keysan, O.; Ulutas, B. Limited-Jerk Sinusoidal Trajectory Design for FOC of PMSM with H-Infinity Optimal Controller. In Proceedings of the 2018 IEEE 18th International Power Electronics and Motion Control Conference (PEMC), Budapest, Hungary, 26–30 August 2018; pp. 704–710. [Google Scholar]
- Schroedter, R.; Roth, M.; Janschek, K.; Sandner, T. Flatness-based open-loop and closed-loop control for electrostatic quasi-static microscanners using jerk-limited trajectory design. Mechatronics 2018, 56, 318–331. [Google Scholar] [CrossRef]
- Weng, W.H.; Kuo, C.F.J. Jerk decision for free-form surface effects in multi-axis synchronization manufacturing. Int. J. Adv. Manuf. Technol. 2019, 105, 799–812. [Google Scholar] [CrossRef]
- Zhang, Y.; Ye, P.; Wu, J.; Zhang, H. An optimal curvature-smooth transition algorithm with axis jerk limitations along linear segments. Int. J. Adv. Manuf. Technol. 2018, 95, 875–888. [Google Scholar] [CrossRef]
- Zhang, Y.; Ye, P.; Zhang, H.; Zhao, M. A local and analytical curvature-smooth method with jerk-continuous feedrate scheduling along linear toolpath. Int. J. Precis. Eng. Manuf. 2018, 19, 1529–1538. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, M.; Ye, P.; Zhang, H. A G4 continuous B-spline transition algorithm for CNC machining with jerk-smooth feedrate scheduling along linear segments. Comput.-Aided Des. 2019, 115, 231–243. [Google Scholar] [CrossRef]
- Ansoategui, I.; Campa, F.J. Mechatronic Model Based Jerk Optimization in Servodrives with Compliant Load. In European Conference on Mechanism Science; Springer: Berlin/Heidelberg, Germany, 2018; pp. 45–52. [Google Scholar]
- Fang, J.H.; Guo, F.; Chen, Z.; Wei, J.H. Improved sliding-mode control for servo-solenoid valve with novel switching surface under acceleration and jerk constraints. Mechatronics 2017, 43, 66–75. [Google Scholar] [CrossRef]
- Liu, J.; Cai, S.; Chen, W.; Chen, I.M. Minimum-jerk trajectory generation and global optimal control for permanent magnet spherical actuator. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 2249–2254. [Google Scholar]
- Masoudi, S.; Feyzi, M.R.; Sharifian, M.B.B. Force ripple and jerk minimisation in double sided linear switched reluctance motor used in elevator application. IET Electr. Power Appl. 2016, 10, 508–516. [Google Scholar] [CrossRef]
- Wu, F.; Zhai, X.; Zhang, D.; Li, R. Minimum-Jerk Trajectory Planning of 3-DOF PM Spherical Motor. Small Spec. Electr. Mach. 2016, 10, 82–85. [Google Scholar]
- Bui, H.T. Toolpath Planning Methodology for Multi-Gantry Fused Filament Fabrication 3D Printing. Master’s Thesis, University of Arkansas, Fayetteville, AR, USA, 2019. [Google Scholar]
- Chen, S.L.; Ma, J.; Teo, C.S.; Kong, C.J.; Lin, W.; Tay, A.; Al Mamun, A. A constrained linear quadratic optimization approach to jerk decoupling cartridge design for vibration suppression. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Korea, 7–11 July 2015; pp. 1472–1477. [Google Scholar]
- Hernandez, D.D. Factors affecting dimensional precision of consumer 3D printing. Int. J. Aviat. Aeronaut. Aerosp. 2015, 2, 2. [Google Scholar] [CrossRef]
- Kamaldin, N.; Chen, S.L.; Teo, C.S.; Lin, W.; Tan, K.K. A novel adaptive jerk control with application to large workspace tracking on a flexure-linked dual-drive gantry. IEEE Trans. Ind. Electron. Autom. 2018, 66, 5353–5363. [Google Scholar] [CrossRef]
- Ma, J.; Chen, S.L.; Teo, C.S.; Kong, C.J.; Tay, A.; Lin, W.; Al Mamun, A. A constrained linear quadratic optimization algorithm toward jerk-decoupling cartridge design. J. Frankl. Inst. 2017, 354, 479–500. [Google Scholar] [CrossRef]
- Mab, J.; Chena, S.L.; SingTeoc, C.; Kongc, C.J.; Tayb, A.; Linc, W.; Al Mamunb, A. Constrained linear quadratic optimization for jerk-decoupling cartridge design. Precis. Motion Syst. Model. Control Appl. 2019, 2019, 13. [Google Scholar]
- Whyman, S.; Arif, K.M.; Potgieter, J. Design and development of an extrusion system for 3D printing biopolymer pellets. Int. J. Adv. Manuf. Technol. 2018, 96, 3417–3428. [Google Scholar] [CrossRef]
- Visser, M. Jerk, snap and the cosmological equation of state. Class. Quantum Gravity 2004, 21, 2603. [Google Scholar] [CrossRef]
- Hur-Diaz, S.; Wirzburger, J.; Smith, D. Three Axis Control of the Hubble Space Telescope Using Two Reaction Wheels and Magnetic Torquer Bars for Science Observations; Report; The National Aeronautics and Space Administration: Washington, DC, USA, 2008.
- Ramon, R.G. Model for Touchdown Dynamics of a Lander on the Solar Power Sail Mission. Master’s Thesis, Luleå University of Technology, Kingston, Jamaica, 2016. [Google Scholar]
- STD, N. 3001. NASA Space Flight Human-System Standard, Volume 2: Human Factors, Habitability, and Environmental Health; The National Aeronautics and Space Administration: Washington, DC, USA, 2011.
- Abuasaker, S. Anti-Jerk Controller with Optimisation-Based Self-Tuning. Ph.D. Thesis, University of Surrey, Guildford, UK, 2016. [Google Scholar]
- Anderson, D.; Desaix, M.; Nyqvist, R. The least uncomfortable journey from A to B. Am. J. Phys. 2016, 84, 690–695. [Google Scholar] [CrossRef]
- Antonelli, R.; Klotz, A.R. A smooth trip to Alpha Centauri: The least uncomfortable journey from A to B. Am. J. Phys. 2017, 85, 469–472. [Google Scholar] [CrossRef]
- Batra, M. Dynamics and Model-Predictive Anti-Jerk Control of Connected Electric Vehicles. Ph.D. Thesis, University of Waterloo, Waterloo, ON, Canada, 2018. [Google Scholar]
- Batra, M.; Maitland, A.; McPhee, J.; Azad, N.L. Non-linear model predictive anti-jerk cruise control for electric vehicles with slip-based constraints. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 3915–3920. [Google Scholar]
- Batra, M.; McPhee, J.; Azad, N.L. Anti-jerk model predictive cruise control for connected electric vehicles with changing road conditions. In Proceedings of the 2017 11th Asian Control Conference (ASCC), Gold Coast, QLD, Australia, 17–20 December 2017; pp. 49–54. [Google Scholar]
- Batra, M.; McPhee, J.; Azad, N.L. Anti-jerk dynamic modeling and parameter identification of an electric vehicle based on road tests. J. Comput. Nonlinear Dyn. 2018, 13, 101005. [Google Scholar] [CrossRef]
- Darokar, K.K. Automotive Driveline Backlash State and Size Estimator Design for Anti-Jerk Control. Master’s Thesis, Michigan Technology University, Houghton, MI, USA, 2019. [Google Scholar]
- Deshmukh, A.; Mulani, B.; Jadhav, N.; Parihar, A.S. Study of frequency characteristics of vehicle motions for the derivation of inherent jerk. Int. J. Passeng. Cars-Mech. Syst. 2016, 9, 419–423. [Google Scholar] [CrossRef]
- Förstberg, J. Ride Comfort and Motion Sickness in Tilting Trains. Ph.D. Thesis, Institutionen för Farkostteknik, Lund, Sweden, 2000. [Google Scholar]
- Gangadharan, K.; Sujatha, C.; Ramamurti, V. Experimental and analytical ride comfort evaluation of a railway coach. In Proceedings of the SEM ORG IMAC XXII, 2004, Conf. pp. 1–15. Available online: https://www.semanticscholar.org/paper/Experimental-and-Analytical-Ride-Comfort-Evaluation-Gangadharan/671e4c731e0ec2b4da82b0482373d61531730a9d?p2df (accessed on 21 October 2020).
- George, T.K.; Gadhia, H.M.; Sukumar, R.; Cabibihan, J.J. Sensing discomfort of standing passengers in public rail transportation systems using a smart phone. In Proceedings of the 2013 10th IEEE International Conference on Control and Automation (ICCA), Hangzhou, China, 12–14 June 2013; pp. 1509–1513. [Google Scholar]
- Grant, P.R.; Haycock, B. Effect of jerk and acceleration on the perception of motion strength. J. Aircr. 2008, 45, 1190–1197. [Google Scholar] [CrossRef]
- Hoberock, L.L. A Survey of Longitudinal Acceleration Comfort Studies in Ground Transportation Vehicles; Report; Council for Advanced Transportation Studies: Austin, TX, USA, 1976. [Google Scholar]
- Huang, W.; Wong, P.K.; Zhao, J.; Ma, X. Output-feedback model-reference adaptive calibration for map-based anti-jerk control of electromechanical automotive clutches. Int. J. Adapt. Control Signal Process. 2018, 32, 265–285. [Google Scholar] [CrossRef]
- Ikuhisa, K.; Lu, X.; Ota, T.; Hamada, H.; Kida, N.; Goto, A. Evaluation of Comfortable Using Jerk Method During Transfer Caring. In Congress of the International Ergonomics Association; Springer: Berlin/Heidelberg, Germany, 2018; pp. 178–188. [Google Scholar]
- Ismail, K.; Susanto, B.; Sholahuddin, U.; Sabar, M. Design of Motor Control Electric Push-Scooter using Accelerometer as Jerk Sensor. In Proceedings of the 2019 International Conference on Sustainable Energy Engineering and Application (ICSEEA), Tangerang, Indonesia, 23–24 October 2019; pp. 69–73. [Google Scholar]
- Khorram, B.; Af Wåhlberg, A.; Tavakoli Kashani, A. Longitudinal jerk and celeration as measures of safety in bus rapid transit drivers in Tehran. Theor. Issues Ergon. Sci. 2020, 21, 577–594. [Google Scholar] [CrossRef]
- Kilinc, A.S.; Baybura, T. Determination of minimum horizontal curve radius used in the design of transportation structures, depending on the limit value of comfort criterion lateral jerk. In TS06G-Engineering Surveying, Machine Control and Guidance; Rome, Italy. 2012. Available online: https://www.fig.net/resources/proceedings/fig_proceedings/fig2012/papers/ts06g/TS06G_kilinc_baybura_5563.pdf (accessed on 21 October 2020).
- Kruger, T.J. Graph-Based Speed Planning for Autonomous Driving. Master’s Thesis, Free University of Berlin, Berlin, Germany, 2019. [Google Scholar]
- Kushiro, I.; Suzuki, K. Mathematical model of skilled driver’s steering pattern based on minimum jerk model. Trans. Soc. Automot. Eng. Jpn. 2016, 47, 1103–1110. [Google Scholar]
- Lemos, N.A. On the least uncomfortable journey from A to B. Eur. J. Phys. 2019, 40, 055802. [Google Scholar] [CrossRef]
- Liu, Y.; Zuo, L. Mixed skyhook and power-driven-damper: A new low-jerk semi-active suspension control based on power flow analysis. J. Dyn. Syst. Meas. Control 2016, 138, 081009. [Google Scholar] [CrossRef]
- Martin, D.; Litwhiler, D.H. An Investigation of acceleration and jerk profiles of public transportation vehicles. In Proceedings of the ASEE Annual Conference and Exposition, Pittsburgh, PA, USA, 22–25 June 2008. [Google Scholar]
- Reddy, G.V.P. Control Oriented Modeling of an Automotive Drivetrain for Anti-Jerk Control. Master’s Thesis, Michigan Technological University, Houghton, MI, USA, 2018. [Google Scholar]
- Scamarcio, A.; Metzler, M.; Gruber, P.; De Pinto, S.; Sorniotti, A. Comparison of anti-jerk controllers for electric vehicles with on-board motors. IEEE Trans. Veh. Technol. 2020. [Google Scholar] [CrossRef]
- Sharma, S.K.; Chaturvedi, S. Jerk analysis in rail vehicle dynamics. Perspect. Sci. 2016, 8, 648–650. [Google Scholar] [CrossRef]
- Shigehiro, R.; Aguilar, G.D.; Kuroda, T. Evaluation method of seakeeping performance for training ships from the viewpoint of passenger comfort. Fish. Sci. 2002, 68, 1827–1830. [Google Scholar] [CrossRef][Green Version]
- Svensson, L.; Eriksson, J. Tuning for Ride Quality in Autonomous Vehicle: Application to Linear Quadratic Path Planning Algorithm. Master’s Thesis, Uppsala University, Uppsala, Sweden, 2015. [Google Scholar]
- Tawadros, P.; Awadallah, M.; Walker, P.; Zhang, N. Using a low-cost bluetooth torque sensor for vehicle jerk and transient torque measurement. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 423–437. [Google Scholar] [CrossRef]
- Tawadros, P.S. Powertrain Electrification for Jerk Reduction and Continuous Torque Delivery. Ph.D. Thesis, Universoty of Technology Sydney, Sydney, Australia, 2019. [Google Scholar]
- Tomi, T. A study on ship vibration and oscillation limits from the viewpoint of unpleasant feelings of passengers (1st report-The susceptibility of human beings to motions). Jpn. Soc. Nav. Archit. Ocean Eng. 1961, 104, 18–30. [Google Scholar]
- Vallee, P.; Robert, T. A numerical model to assess the risk of fall in public transportation—application to the influence of the Jerk in emergency braking. In Proceedings of the IRCOBI Conference, Lyon, France, 9–11 September 2015. [Google Scholar]
- Van Santen, G.W. Introduction to a Study of Mechanical Vibration: UDC No. 534.1: 621–752; Philips Technical Library: London, UK, 1953; Available online: https://science.sciencemag.org/content/120/3109/179.2 (accessed on 21 October 2020).
- Veerapaneni, N.V.M. Real-Time Minimum Jerk Optimal Trajectory Synthesis and Tracking for Ground Vehicle Applications. Master’s Thesis, University of Texas, Austin, TX, USA, 2018. [Google Scholar]
- Yamaguchi, A.; Ohishi, K.; Yokokura, Y.; Miyazaki, T.; Sasazaki, K. Backlash-based Shock Isolation Control for Jerk Reduction in Clutch Engagement. IEEJ J. Ind. Appl. 2019, 8, 160–169. [Google Scholar] [CrossRef]
- Zeng, X.; Cui, H.; Song, D.; Yang, N.; Liu, T.; Chen, H.; Wang, Y.; Lei, Y. Jerk analysis of a power-split hybrid electric vehicle based on a data-driven vehicle dynamics model. Energies 2018, 11, 1537. [Google Scholar] [CrossRef]
- Muszynska, A.; Bently, D. Frequency-swept rotating input perturbation techniques and identification of the fluid force models in rotor/bearing/seal systems and fluid handling machines. J. Sound Vib. 1990, 143, 103–124. [Google Scholar] [CrossRef]
- Muszynska, A.; Bently, D.E. Comments on Frequency Swept Rotating Input Perturbation Techniques and Identification of the Fluid Force Models in Rotor/bearing/seal Systems and Fluid Handling Machines; Report; 1991. Available online: https://ntrs.nasa.gov/citations/19920005152 (accessed on 21 October 2020).
- Inaudi, J.A.; Kelly, J.M. Hybrid isolation systems for equipment protection. Earthq. Eng. Struct. Dyn. 1993, 22, 297–313. [Google Scholar] [CrossRef]
- Funakoshi, D.; Okada, S.; Watanabe, T.; Seto, K. Levitation and Vibration Supression of an Elastic Rotor by Using Active Magnetic Bearings. In Proceedings of the ASME 2012 5th Annual Dynamic Systems and Control Conference Joint with the JSME 2012 11th Motion and Vibration Conference, Fort Lauderdale, FL, USA, 17–19 October 2012; pp. 61–65. [Google Scholar]
- Eager, D. Accelerometers used in the measurement of jerk, snap, and crackle. In Proceedings of the Australian Acoustical Society 2018 Annual Conference, Adelaide, Australia, 6–9 November 2018. [Google Scholar]
- Kwon, B.M.; Moon, J.H.; Choi, H.D. Performance analysis of the GPS receiver under high acceleration and jerk environments. In Proceedings of the Korean Institute of Navigation and Port Research Conference. 2006, Volume 2, pp. 279–283. Available online: https://www.koreascience.or.kr/article/CFKO200636035497527.page (accessed on 21 October 2020).
- Kwon, B.M.; Moon, J.H.; Choi, H.D.; Cho, G.R. Comparative Performance Analyses of GPS Receivers under High-Dynamic Conditions. In Proceedings of the 17th World Congress The International Federation of Automatic Control, Seoul, Korea, 6–11 July 2008; Volume 41, pp. 4725–4730. [Google Scholar]
- Fazio, P.; Granieri, G.; Casetta, I.; Cesnik, E.; Mazzacane, S.; Caliandro, P.; Pedrielli, F.; Granieri, E. Gait measures with a triaxial accelerometer among patients with neurological impairment. Neurol. Sci. 2013, 34, 435–440. [Google Scholar] [CrossRef]
- Lapinski, M.T. A Platform for High-Speed Bio-Mechanical Analysis Using Wearable Wireless Sensors. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2013. [Google Scholar]
- Aguirre, A. Evaluation of a Technological Device for Upper-Limb Motor Assessment. Ph.D. Thesis, San Francisco State University, San Francisco, CA, USA, 2016. [Google Scholar]
- Zhang, L.; Diraneyya, M.M.; Ryu, J.; Haas, C.T. Jerk as an indicator of physical exertion and fatigue. Autom. Constr. 2019, 104, 120–128. [Google Scholar] [CrossRef]
- Washington, J.K.; Oliver, G.D. Relationship of pelvis and torso angular jerk to hand velocity in female softball hitting. J. Sport. Sci. 2020, 38, 46–52. [Google Scholar] [CrossRef]
- de Lucena, D.S.; Stoller, O.; Rowe, J.B.; Chan, V.; Reinkensmeyer, D.J. Wearable sensing for rehabilitation after stroke: Bimanual jerk asymmetry encodes unique information about the variability of upper extremity recovery. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 1603–1608. [Google Scholar]
- Zhang, L.; Diraneyya, M.M.; Ryu, J.; Haas, C.T.; Abdel-Rahman, E. Assessment of Jerk as a Method of Physical Fatigue Detection. In Proceedings of the ASME 2018 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Quebec City, QC, Canada, 26–29 August 2018. [Google Scholar]
- Zhang, L.; Diraneyya, M.; Ryu, J.; Haas, C.; Abdel-Rahman, E. Automated Monitoring of Physical Fatigue Using Jerk. In Proceedings of the International Symposium on Automation and Robotics in Construction, Banff, AB, Canada, 21–24 May 2019; Volume 36, pp. 989–997. [Google Scholar]
- Zhang, L. Jerk as a Method of Identifying Physical Fatigue and Skill Level in Construction Work. Master’s Thesis, University of Waterloo, Waterloo, ON, Canada, 2019. [Google Scholar]
- Masuda, A.; Sone, A.; Matsuura, T. Development of Jerk Dot Sensor and Its Application to Condition Monitoring. In Proceedings of the Symposium on Evaluation and Diagnosis. pp. 118–121. Available online: https://www.jstage.jst.go.jp/article/jsmesed/2002.1/0/2002.1_118/_article/-char/ja/ (accessed on 21 October 2020).
- Orsagh, R.; Brown, D. Sensor for Measuring Jerk and a Method for Use Thereof. U.S. Patent Application 11/191, 2 February 2006. [Google Scholar]
- Xueshan, Y.; Xiaozhai, Q.; Lee, G.C.; Tong, M.; Jinming, C. Jerk and jerk sensor. In Proceedings of the 14th World Conference on Earthquake Engineering, Beijing, China, 12–17 October 2008. [Google Scholar]
- Manabe, T.; Wakui, S. Production and Application of Horizontal Jerk Sensor. In Proceedings of the 2018 International Conference on Advanced Mechatronic Systems (ICAMechS), Zhengzhou, China, 30 August–2 September 2018; pp. 298–303. [Google Scholar]
- Thompson, M. The application of motion capture to embodied music cognition research. Jyväskylä Stud. Humanit. 2012, 176, 146493785. [Google Scholar]
- Jongejan, B.; Paggio, P.; Navarretta, C. Classifying head movements in video-recorded conversations based on movement velocity, acceleration and jerk. In Proceedings of the 4th European and 7th Nordic Symposium on Multimodal Communication (MMSYM 2016), Copenhagen, Denmark, 29–30 September 2016; pp. 10–17. [Google Scholar]
- Sharker, S.I.; Holekamp, S.; Mansoor, M.M.; Fish, F.E.; Truscott, T.T. Water entry impact dynamics of diving birds. Bioinspiration Biomim. 2019, 14, 056013. [Google Scholar] [CrossRef]
- Hossain, M.; Hayati, H.; Eager, D. A Comparison of the Track Shape of Wentworth Park and Proposed Murray Bridge; Report; University of Technology Sydney: Sydney, Australia, 2016. [Google Scholar]
- Hayati, H.; Eager, D.; Jusufi, A.; Brown, T. A Study of Rapid Tetrapod Running and Turning Dynamics Utilizing Inertial Measurement Units in Greyhound Sprinting. In Proceedings of the ASME 2017 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Cleveland, OH, USA, 6–9 August 2017. [Google Scholar]
- Hayati, H.; Eager, D.; Stephenson, R.; Brown, T.; Arnott, E. The impact of track related parameters on catastrophic injury rate of racing greyhounds. In Proceedings of the 9th Australasian Congress on Applied Mechanics, Sydney, Australia, 27–29 November 2017; p. 311. [Google Scholar]
- Hayati, H.; Walker, P.; Mahdavi, F.; Stephenson, R.; Brown, T.; Eager, D. A comparative study of rapid quadrupedal sprinting and turning dynamics on different terrains and conditions: Racing greyhounds galloping dynamics. In Proceedings of the ASME 2018 International Mechanical Engineering Congress and Exposition, Pittsburgh, PA, USA, 11–14 November 2018. [Google Scholar]
- Mahdavi, F.; Hossain, M.I.; Hayati, H.; Eager, D.; Kennedy, P. Track Shape, Resulting Dynamics and Injury Rates of Greyhounds. In Proceedings of the ASME 2018 International Mechanical Engineering Congress and Exposition, Pittsburgh, PA, USA, 11–14 November 2018; p. V013T05A018. [Google Scholar]
- Hossain, I.; Eager, D.; Walker, P. Greyhound racing ideal trajectory path generation for straight to bend based on jerk rate minimization. Sci. Rep. 2020, 10, 7088. [Google Scholar] [CrossRef]
- Malushte, S.R. Prediction of Seismic Design Response Spectra Using Ground Characteristics. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 1987. [Google Scholar]
- Bertero, R.D.; Bertero, V.V. Performance-based seismic engineering: The need for a reliable conceptual comprehensive approach. Earthq. Eng. Struct. Dyn. 2002, 31, 627–652. [Google Scholar] [CrossRef]
- Geoffrey Chase, J.; Barroso, L.R.; Hunt, S. Quadratic jerk regulation and the seismic control of civil structures. Earthq. Eng. Struct. Dyn. 2003, 32, 2047–2062. [Google Scholar] [CrossRef]
- Tong, M.; Wang, G.Q.; Lee, G.C. Time derivative of earthquake acceleration. Earthq. Eng. Eng. Vib. 2005, 4, 1–16. [Google Scholar] [CrossRef]
- He, H.; Li, R.; Chen, K. Characteristics of jerk response spectra for elastic and inelastic systems. Shock Vib. 2015, 2015. Available online: https://www.hindawi.com/journals/sv/2015/782748/ (accessed on 21 October 2020). [CrossRef]
- Chakraborty, S.; Ray-Chaudhuri, S. Energy Transfer to High-Frequency Modes of a Building due to Sudden Change in Stiffness at Its Base. J. Eng. Mech. 2017, 143, 04017050. [Google Scholar] [CrossRef]
- Taushanov, A. Jerk Response Spectrum. Report. 2018. Available online: https://www.researchgate.net/profile/Alexander_Taushanov/publication/323150255_Jerk_Response_Spectrum/links/5a82e5040f7e9bda86a00d81/Jerk-Response-Spectrum.pdf (accessed on 21 October 2020).
- Papandreou, I.; Papagiannopoulos, G. On the jerk spectra of some inelastic systems subjected to seismic motions. Soil Dyn. Earthq. Eng. 2019, 126, 105807. [Google Scholar] [CrossRef]
- Yaseen, A.A.; Ahmed, M.S.; Al-Kamaki, Y.S.S. Jerk Performance as Seismic Intensity Measure. In Proceedings of the 3rd International Conference on Recent Innovations in Engineering, Duhok, Iraq, 9–10 September 2020. [Google Scholar]
- Sofronie, R. On the Seismic Jerk. J. Geol. Resour. Eng. Comput. 2017, 4, 147–152. [Google Scholar] [CrossRef]
- Savage, J. The Science of Running Shoes. Technical Report. Available online: http://fellrnr.com/wiki/The_Science_of_Running_Shoes (accessed on 20 October 2020).
- Hayati, H.; Eager, D.; Walker, P. An impact attenuation surfacing test to analyse the dynamic behaviour of greyhound racetrack sand surface. In Proceedings of the World Engineers Convention, Melbourne, Australia, 20–22 November 2019; p. 391. [Google Scholar]
- Sone, A.; Masuda, A.; Matsuura, T.; Yamamura, T.; Yamada, M.; Yamamoto, S. Detection of structural damages by jerk-dot sensors. Trans. Nippon Kikai Gakkai Ronbunshu C Hen 2004, 16, 1318–1323. [Google Scholar]
- Zhang, Z.; Verma, A.; Kusiak, A. Fault analysis and condition monitoring of the wind turbine gearbox. IEEE Trans. Energy Convers. 2012, 27, 526–535. [Google Scholar] [CrossRef]
- Iyama, J.; Wakui, M. Threshold value and applicable range of nonlinear behavior detection method using second derivative of acceleration. Jpn. Archit. Rev. 2019, 2, 153–165. [Google Scholar] [CrossRef]
- Sumathy, M.; Kilicman, A.; Manuel, M.M.S.; Mary, J. Qualitative study of Riccati difference equation on maneuvering target tracking and fault diagnosis of wind turbine gearbox. Cogent Eng. 2019, 6, 1621423. [Google Scholar] [CrossRef]
- Ostermeyer, G.P.; Schiefer, F. On Pain Detection in Multibody Systems. In Applied Mechanics and Materials; Trans Tech Publications: Stafa-Zurich, Switzerland, 2008; Volume 9, pp. 115–126. Available online: https://www.scientific.net/AMM.9.115 (accessed on 21 October 2020).
- Fiori, S.; Sabino, N.; Bonci, A. In-Lab Drone’s Attitude Maneuvering Fluency Evaluation by a Gyroscopic Lurch Index. In Proceedings of the 10th International Conference on Circuits, Systems, Signals and Telecommunications, Barcelona, Spain, 13–15 February 2016; pp. 37–46. [Google Scholar]
- Guye, K. Development of an Indoor Multirotor Testbed for Experimentation on Autonomous Guidance Strategies. Master’s Thesis, South Dakota State University, Brookings, SD, USA, 2018. [Google Scholar]
- Lai, S.P.; Lan, M.l.; Li, Y.x.; Chen, B.M. Safe navigation of quadrotors with jerk limited trajectory. Front. Inf. Technol. Electron. Eng. 2019, 20, 107–119. [Google Scholar] [CrossRef]
- Luukkonen, T. Modelling and control of quadcopter. Indep. Res. Proj. Appl. Math. 2011, 22. Available online: https://sal.aalto.fi/publications/pdf-files/eluu11_public.pdf (accessed on 21 October 2020).
- Phang, S.K.; Lai, S.; Wang, F.; Lan, M.; Chen, B.M. Systems design and implementation with jerk-optimized trajectory generation for UAV calligraphy. Mechatronics 2015, 30, 65–75. [Google Scholar] [CrossRef]
- Rakgowa, T.; Wong, E.K.; Sim, K.S.; Nia, M. Minimal jerk trajectory for quadrotor VTOL procedure. In Proceedings of the 2015 IEEE International Symposium on Robotics and Intelligent Sensors (IRIS), Langkawi, Malaysia, 18–20 October 2015; pp. 284–287. [Google Scholar]
- Rousseau, G.; Maniu, C.S.; Tebbani, S.; Babel, M.; Martin, N. Quadcopter-performed cinematographic flight plans using minimum jerk trajectories and predictive camera control. In Proceedings of the 2018 European Control Conference (ECC), Limassol, Cyprus, 12–15 June 2018; pp. 2897–2903. [Google Scholar]
- Silva, J.P.; De Wagter, C.; de Croon, G. Quadrotor Thrust Vectoring Control with Time and Jerk Optimal Trajectory Planning in Constant Wind Fields. Unmanned Syst. 2018, 6, 15–37. [Google Scholar] [CrossRef]
- Tal, E.; Karaman, S. Accurate tracking of aggressive quadrotor trajectories using incremental nonlinear dynamic inversion and differential flatness. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC), Miami Beach, FL, USA, 17–19 December 2018; pp. 4282–4288. [Google Scholar]
- Perri, S.; Bianco, C.G.L.; Locatelli, M. Jerk bounded velocity planner for the online management of autonomous vehicles. In Proceedings of the 2015 IEEE International Conference on Automation Science and Engineering (CASE), Gothenburg, Sweden, 24–28 August 2015; pp. 618–625. [Google Scholar]
- Raineri, M.; Bianco, C.G.L. Jerk limited planner for real-time applications requiring variable velocity bounds. In Proceedings of the 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE), Vancouver, BC, Canada, 22–26 August 2019; pp. 1611–1617. [Google Scholar]
- Bisoffi, A.; Biral, F.; Da Lio, M.; Zaccarian, L. Longitudinal jerk estimation for identification of driver intention. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Las Palmas, Spain, 15–18 September 2015; pp. 1855–1861. [Google Scholar]
- Bisoffi, A.; Biral, F.; Da Lio, M.; Zaccarian, L. Longitudinal jerk estimation of driver intentions for advanced driver assistance systems. IEEE/ASME Trans. Mechatron. 2017, 22, 1531–1541. [Google Scholar] [CrossRef]
- Feng, F.; Bao, S.; Sayer, J.R.; Flannagan, C.; Manser, M.; Wunderlich, R. Can vehicle longitudinal jerk be used to identify aggressive drivers? An examination using naturalistic driving data. Accid. Anal. Prev. 2017, 104, 125–136. [Google Scholar] [CrossRef]
- Hasan, N. Relationship between Twist, Jerk, and Speed: Twist-Tolerance Values and Measuring Chords. J. Transp. Eng. Part A Syst. 2020, 146, 04020005. [Google Scholar] [CrossRef]
- Itkonen, T.H.; Pekkanen, J.; Lappi, O.; Kosonen, I.; Luttinen, T.; Summala, H. Trade-off between jerk and time headway as an indicator of driving style. PLoS ONE 2017, 12, e0185856. [Google Scholar] [CrossRef]
- Mousavi, S.M. Identifying High Crash Risk Roadways through Jerk-Cluster Analysis. Master’s Thesis, Louisiana State University, Baton Rouge, LA, USA, 2015. [Google Scholar]
- Weidner, W.; Transchel, F.W.; Weidner, R. Telematic driving profile classification in car insurance pricing. Ann. Actuar. Sci. 2017, 11, 213–236. [Google Scholar] [CrossRef]
- Szabó, I. Geschichte der Mechanischen Prinzipien und Ihrer Wichtigsten Prinzipien; Birkhäuser: Basel, Switzerland, 1977. [Google Scholar]
- Dugas, R. Histoire de la Mechanique; Éditions de Griffon: Neuchâtel, Switzerland, 1955. [Google Scholar]
- Dugas, R. History of Mechanics, translation by John Maddox of Histoire de la Mechanique; Dover: London, UK, 1988. [Google Scholar]
- Wikipedia Contributors. Pierre Varignon—Wikipedia, The Free Encyclopedia. 2018. Available online: https://en.wikipedia.org/wiki/Pierre_Varignon (accessed on 28 May 2020).
- Melchior, P. Zeitschfrift Ver. Dtsch. Ing. 1928, 72, 1842.
- Schlobach. Gluckauf. Berg- und Huttenmännischen Zeitschrift 1928, 73, 16. [Google Scholar]
- Whinnery, T.; Forster, E.M. The+ Gz-induced loss of consciousness curve. Extrem. Physiol. Med. 2013, 2, 19. [Google Scholar] [CrossRef] [PubMed]
- McKenney, W.R. Human Tolerance to Abrupt Accelerations: A Summary of the Literature; Report; Dynamic Science Inc. Avser Facility: Phoenix, AZ, USA, 1970. [Google Scholar]
- Coats, T.W.; Riley, M.R. A Comparison of Shock Isolated Seat and Rigid Seat Acceleration Responses to Wave Impacts in a High-Speed Craft; Report; Naval Surface Warfare Center: Carderock, VA, USA, 2018. [Google Scholar]
- Riley, M.R.; Haupt, K.D.; Ganey, H.C.; Coats, T.W. Laboratory Test Requirements for Marine Shock Isolation Seats; Report; Naval Surface Warfare Center Carderock Division: Norfolk, VA, USA, 2018. [Google Scholar]
- AASHTO-2001. American Association of State Highway and Transportation Officials; Washington, DC, USA, 2001. Available online: https://www.transportation.org/ (accessed on 21 October 2020).
- Wasserstein, R.L.; Lazar, N.A. The ASA statement on p-values: Context, process, and purpose. Am. Stat. 2016, 70, 129–133. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).