
Historical and Current Landscapes of Autonomous Quadrotor Control: An Early-Career Researchers’ Guide



Abstract
1. Introduction
1.1. Motivation
- Are these controllers truly cutting-edge?
- Where should their focus be directed?
- How can they fine-tune the control parameters?
1.2. Contribution
- In Section 2, we present a brief historical overview that has significantly influenced the current control technologies applied to quadrotors.
- In Section 3, we provide a comprehensive data-based review of peer-reviewed literature on QTTC over the past decade. This review covers various aspects, including modeling, verification, control structures, control input terms, and techniques used to address under-actuation.
- In Section 4, we identify five major trends from the past decade to facilitate an improved analysis and grouping of papers based on their control objectives. Furthermore, we incorporate several tables to clearly illustrate the disparities in the performances among high-impact publications. This process highlights bottlenecks that impede progress in this field through data-based analysis and proposes solutions to address these challenges.
- In Section 5, we unveil the state-of-the-art control methods based on our comprehensive analysis. Additionally, we offer insights into the challenges associated with selecting an appropriate controller for a specific application and provide suggestions to overcome these hurdles.
2. A Brief Historical Overview of QTTC (Beginning to 2013)
3. Data-Based Review of QTTC (2014—Present)
4. Five Major Trends in the Last Decade
4.1. Toward Agile Flight
4.2. Optimal Control
- A time-optimal MPC aims to push the boundaries in agile flight, accomplishing a flight speed of 40 m/s. This model outperformed a human operator in a competitive drone-racing task [76]. The optimization problem is subject not only to the system dynamics, initial condition constraints, and input constraints but also to four additional constraints: progress evolution, boundary, sequence, and complimentary progress constraints. Despite using only 20 steps over 0.05 s, they consider the single-rotor thrust constraints rather than the four-dimensional continuous input space.
- A data-driven MPC utilized a Gaussian process (GP) to model the aerodynamic effects in agile flight [77]. They used a multiple shooting scheme, divided the prediction horizon into a sequence of shorter intervals, and formulated the optimization problem over these intervals. However, the algorithm was not executed onboard, and commands were only sent from the ground station.
- A policy-search-for-model-predictive-control framework consists of a parameterized MPC where the hard-to-optimize decision variables are represented as high-level policies. The quadrotor was shown to be agile enough to pass through swinging gates [87] (https://github.com/uzh-rpg/high_mpc) (last accessed on 16 February 2024).
4.3. Learning-Based Control
4.4. SMC and Bk Control Techniques

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Yr | Ctt | Model | CM, Gains | Ver | PS | m kg | Experiment Condition | Results, Code |
|---|---|---|---|---|---|---|---|---|---|
| [37] | 07 | 1100+ | ▲ ▲ ▲ | Integral Bk | ♦ | Cam | 0.52 | 2-meter Sq | MTE, 20 |
| [39] | 07 | 420+ | ▲ ▲ ▲ | PID | ♦ | GNSS | 2.5 | 0.8-meter Sq | MTE, 50 |
| [61] | 07 | <10 | - | HOTSMC | ♦ | Cam | - | moving target | MAE, [8, 15, 13] |
| [103] | 15 | 290+ | ▲ ▲ | LPC | ♦ | GNSS | 1.336 | Point Tracking, unknown wind | - |
| [104] | 15 | 170+ | ▲ ▲ ▲ | RISE, 9 | ♦ | Cam | 0.0045 | Rec (2.73 m, 0.2 m/s) | MTE [25, 50, 5] |
| [105] | 16 | 160+ | ▲ ▲ ▲ | T2FNN | ♦ | MC | 0.68 | Lem (3.2 m, 2 m/s) | RMSE 52.6 |
| [88] | 17 | 480+ | MF | DPG | ♦ | MC | 0.665 | Squ (1 m) | [C10] |
| [89] | 19 | 70+ | MF | single policy RL | ♦ | MC | {0.033 0.124} | Lem (1 m) | MSE {19 47}, [C11] |
| [106] | 20 | 90+ | ▲ ▲ ▲ | Bk-SMC, 12 | ♦ | GNSS | 2.5 | predetermined | - |
| [91] | 20 | 60+ | MF | PPO | ♦ | MC | 0.665 | Cir (2 m) | RMSE 14.56, [C12] |
| [107] | 20 | 20+ | ▲ ▲ ▲ | STSMC, 20 | ♦ | GNSS | 2.5 | Lem, Wind (3 m/s) | RMSE [21, 19, 16] |
| [98] | 20 | 20+ | ▲ ▲ ▲ | Sat Bk | ♦ | MC | 0.2 | Aggressive | - |
| [108] | 21 | 20+ | MF | DDPG | ♦ | GNSS | 0.2 | Hel, unknown wind | 11.4 |
| [109] | 21 | <10 | ▲ ▲ ▲ | AFTSMC, 14 | ♦ | GNSS | 2.5 | Cir (12 m) | RMSE [25, 22, 18] |
| [110] | 22 | 20+ | ▲ ▲ | NNMPC, 14 | ♦ | MC | - | Sinusoidal | RMSE [16, 20, 8], [C13] |
| [111] | 23 | <10 | ▲ ▲ | RISE + RL, 15 | ♦ | MC | 1.6 | Smooth, unknown wind | MTE [10, 11, 5] |
4.5. Supplementary Robust Techniques
4.5.1. Disturbance Estimation and Compensation
| Ref | Yr | Ctt | BsC | SpC | ACG | Ver | PS | m kg | Experiment Condition | Results | max PI |
|---|---|---|---|---|---|---|---|---|---|---|---|
| [126] | 14 | 470+ | ● | ◼ | +6 | ♦ | - | 1 | Sinusoidal | MTE 10 | - |
| [127] | 14 | 200+ | ● | ◼ | - | ♦ | MC | 0.08 | Lem (0.75 m) | MTE 7 | - |
| [128] | 14 | 110+ | ● | ◼ | +3 | ♦ | MC | 0.65 | Cir (0.9 m), Unknown m | - | - |
| [129] | 15 | 230+ | ● | ◼ | - | ♦ | MC | <1 | Varying m, wind (5 m/s) | - | - |
| [130] | 16 | 80+ | ● | ◼ | +1 | ♦ | MC | 1.4 | Squ (1 m) | RMSE [4.34, 3.68, 2.23] | 40% |
| [131] | 16 | 150+ | ● | ◼ | +3 | ♦ | GNSS | 0.67 | Squ (2 m), fan | MTE 20 | - |
| [132] | 16 | 100+ | ● | ◼◼ | +1 | ♦ | GNSS | 0.67 | Hov, wind (3.8 m/s), +52% m | MTE 15 | - |
| [133] | 17 | 140+ | ● | ◼ | +6 | ♦ | MC | 1.4 | Cir (1 m), fan | MTE [1.1, 1.6, 1.7] | 75% |
| [134] | 17 | 130+ | ● | ◼ | +6 | ♦ | GNSS | 3 | Rec (2 m), unknown wind | MTE [50, 50, 3] | - |
| [135] | 17 | 60+ | ● | ◼ | +6 | ♦ | GNSS | 2 | cubic spline, unknown wind | - | - |
| [136] | 17 | 30+ | ● | ◼ | - | ♦ | GNSS | 1.09 | Hel (6 m), unknown wind | - | - |
| [137] | 19 | 90+ | ● | ◼ | - | ♦ | MC | 1.75 | Cir (1), Touch | MTE 3 | 77% |
| [86] | 19 | 20+ | ● | ◼◼ | +3 | ♦ | MC | 0.7 | Line, wind (12 m/s) | MTE 10 | 74% |
| [138] | 20 | 90+ | ● | ◼ | +6 | ♦ | MC | 0.5 | Cir, [(2 m, 1.26 m/s)] | MAE 3.5 | 77% |
| [10] | 20 | 60+ | ● | ◼ | +3 | ♦ | MC | 1.4 | Hel | RMSE [2.28, 2.72, 0.97] | - |
| [139] | 20 | 40+ | ● | ◼ | +4 | ♦ | MC | 2.1 | Sine, wind (10 m/s) | RMSE 7 | 53% |
| [9] | 20 | 40+ | ● | ◼ | +3 | ♦ | Cam | 0.063 | Lissajous, fan | RMSE [5.8, 3.8, 2] | - |
| [140] | 20 | 20+ | ● | ◼◼ | +6 | ♦ | MC | 1.75 | Sine, wind (1.5 m/s) | MTE [9.7, 16, 4.12] | - |
| [141] | 20 | 10+ | ● | ◼ | - | ♦ | GNSS | - | Lem (5 m), unknown wind | - | - |
| [124] | 21 | 40+ | ● | ◼ | - | ♦ | GNSS | 0.38 | Squ (4 m), no wind | RMSE [43, 42, 4] | - |
| [90] | 21 | 20+ | ● | ◼ | - | ♦ | GNSS | 0.665 | Squ (10 m), wind (4.2 m/s) | RMSE 45 | 44% |
| [142] | 21 | <10 | ● | ◼ | +6 | ♦ | GNSS | - | Circ, unknown wind | MTE 200 | - |
| [143] | 21 | <10 | ● | ◼ | - | ♦ | GNSS | 1.346 | Hel, unknown wind | MTE 56 | 41% |
| [114] | 21 | <10 | ● | ◼ | - | ♦ | MC | 1.4 | Hel (0.6 m) | MTE [2.26, 2.04, 1.58] | - |
| [144] | 22 | 10+ | ● | ◼ | - | ♦ | GNSS | 1.5 | Cir (20 m), unknown wind | RMSE [25, 17, 16] | - |
| [145] | 22 | <10 | ● | ◼◼ | +15 | ♦ | MC | - | Sine, [+500g payload, wind (5 m/s)] | RMSE {7.5, 12.07, 9} | 48% |
| [79] | 22 | <10 | ● | ◼ | +3 | ♦ | MC | - | Cir (5 m), wind (4 m/s) | RMSE 9.2 | 30% |
| [146] | 22 | <10 | ● | ◼ | +4 | ♦ | GNSS | 2 | Sine (2 m), unknown wind | [20, 20, 8] | 67% |
| [147] | 22 | <10 | ● | ◼ | +6 | ♦ | MC | - | Lem, wind (2 m/s) | MAE [2.17, 1.11, 2.82] | - |
| [148] | 22 | <10 | ● | ◼ | - | ♦ | GNSS | 2.4 | Cir, wind (3 m/s) | MAE [23, 26, 32] | - |
| [149] | 22 | <10 | ● | ◼ | +4 | ♦ | MC | 1.79 | Lem | RMSE [4.75, 3.3, 1.32] | - |
| [150] | 23 | <10 | ● | ◼◼ | +30 | ♦ | MC | 0.25 | Lem, [0.5 m, +60-g payload, wind]) | MAE {6.8, 3.97, 3.93} | - |
| [99] | 23 | <10 | ● | ◼◼ | - | ♦ | MC | 0.72 | Lem, +0.045 kg payload | steady state error 5 | 55% |
4.5.2. Adaptation, a Delicate Solution for Uncertainty
4.5.3. Prescribed Performance Control: Bounded Tracking Error
5. Comparative Discussion
6. Future Directions and Suggestions
- (a)
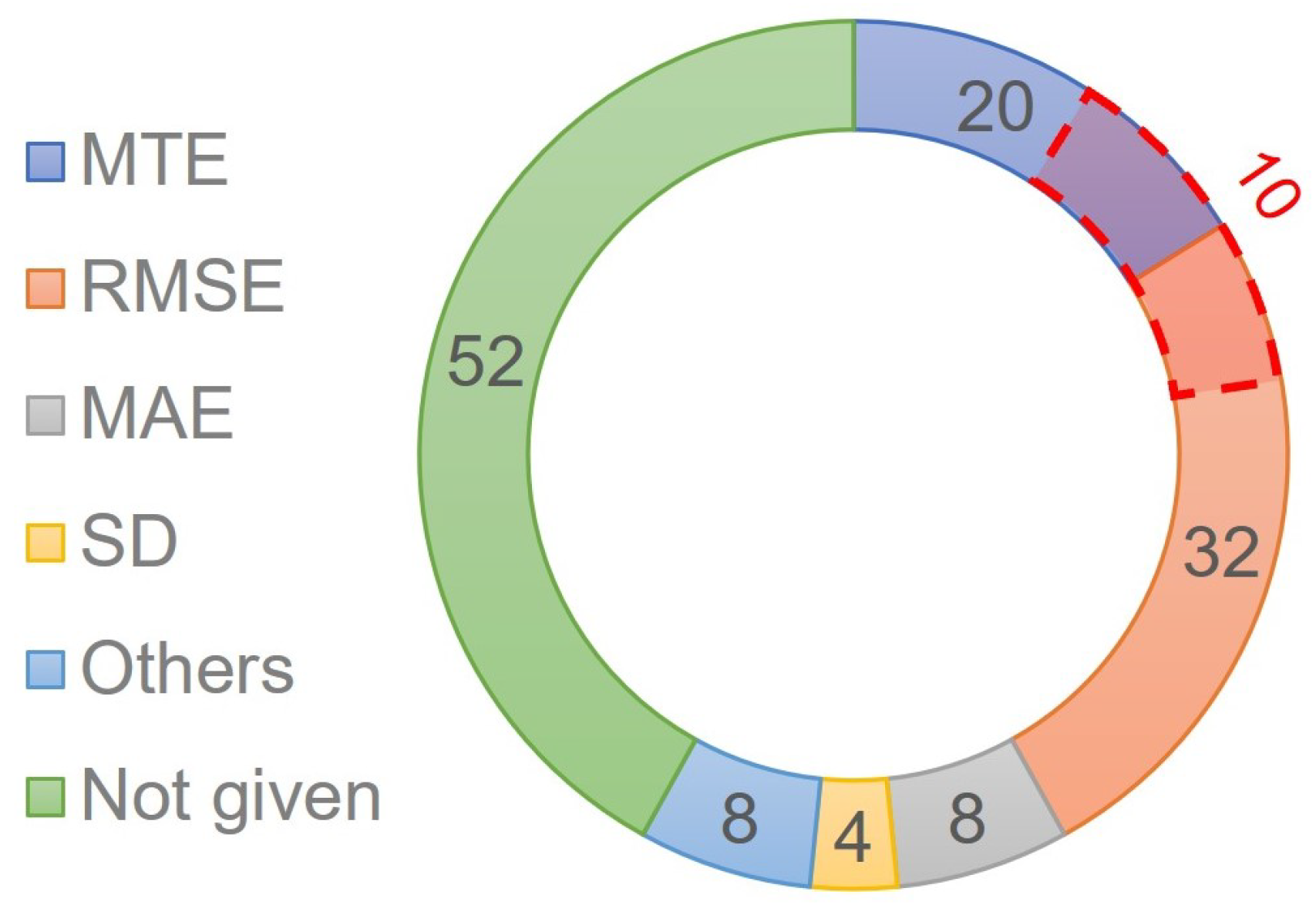
- Lack of standard for qualitative analysis: Some papers show promising results, but the majority of the published papers with experimental validation do not provide qualitative analysis, relying solely on performance figures for evaluation, as shown in Figure 8. This becomes challenging as accuracy is often evaluated in the order of a few centimeters.Complete qualitative analysis should include both RMSE and MTE to assess the performance and robustness of the control system. The RMSE represents the overall accuracy, while MTE captures the worst-case scenario of the trajectory-tracking task. According to those collected, only 10 papers [10,75,111,114,133,140,143,145,159,160] have presented both RMSE and MTE in their results, as shown in Figure 8.
- (b)
- Lack of standard for robustness evaluation: Despite gathering data to evaluate each proposal, it is difficult to determine which methods have good robustness characteristics. The main reason is that each paper verifies their method using different quadrotors and experiment conditions.To address this issue, a standard for introducing disturbances and uncertainties based on quadrotor characteristics should be established. For instance, horizontal disturbance should be quantified in Newtons, relative to the drag-to-weight ratio, , whereas payload should be expressed as the ratio between total weight with the payload and the maximum thrust , .
- (c)
- Difficulty in reproducibility: Some papers do not disclose certain parameters, such as quadrotor mass, controller gains, wind disturbance speed, trajectory speed, controller frequency, position sensors, etc. This lack of transparency hinders the reproducibility of the paper, and this may prevent other researchers from building upon and improving the work. Another challenge in reproducibility is that one cannot guarantee that the results in Table 2 and Table 3 can be obtained due to the inherent variability introduced by factors such as quadrotor vehicle parameters, sensor types, trajectory specifications, and environmental conditions. While some researchers have proposed gain-tuning strategies for their method to enhance result reproducibility, it is noteworthy that the successful replication of outcomes is contingent upon the practitioner’s proficiency in parameter tuning, introducing a significant dependency on individual tuning skills for achieving the promised performance.One solution to these problems is providing an open-source implementation of their proposed controllers. This not only assists interested readers in replicating results for validation but also contributes to addressing potential issues. Utilizing platforms such as GitHub is highly advantageous, allowing interested individuals to engage in discussions, pose questions, and stay informed about the ongoing developments. This could also facilitate the transition of promising control technologies to actual deployment by addressing challenges.
- Can MPC and PD control defend their status as the preferred controllers due to their promise of optimal performance and simplicity?
- Will novel supplementary robust techniques aid existing or new control techniques in surpassing 15 cm accuracy and serve as platforms for applications requiring high accuracy?
- Can SMC and Bk control demonstrate their worthiness and be deployed in actual deployment?
- Will model-based control become obsolete as Lrn control introduces new capabilities in the future?
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Grzonka, S.; Grisetti, G.; Burgard, W. A fully autonomous indoor quadrotor. IEEE Trans. Robot. 2011, 28, 90–100. [Google Scholar] [CrossRef]
- Özbek, N.S.; Önkol, M.; Efe, M.Ö. Feedback control strategies for quadrotor-type aerial robots: A survey. Trans. Inst. Meas. Control 2016, 38, 529–554. [Google Scholar] [CrossRef]
- Kendoul, F. Survey of advances in guidance, navigation, and control of unmanned rotorcraft systems. J. Field Robot. 2012, 29, 315–378. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the unmanned aerial vehicles (UAVs): A comprehensive review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Mu, C.; Zhang, Y. Learning-based robust tracking control of quadrotor with time-varying and coupling uncertainties. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 259–273. [Google Scholar] [CrossRef] [PubMed]
- Wang, N.; Deng, Q.; Xie, G.; Pan, X. Hybrid finite-time trajectory tracking control of a quadrotor. ISA Trans. 2019, 90, 278–286. [Google Scholar] [CrossRef] [PubMed]
- Razmi, H.; Afshinfar, S. Neural network-based adaptive sliding mode control design for position and attitude control of a quadrotor UAV. Aerosp. Sci. Technol. 2019, 91, 12–27. [Google Scholar] [CrossRef]
- Wang, D.; Pan, Q.; Shi, Y.; Hu, J.; Zhao, C. Efficient nonlinear model predictive control for quadrotor trajectory tracking: Algorithms and experiment. IEEE Trans. Cybern. 2021, 51, 5057–5068. [Google Scholar] [CrossRef] [PubMed]
- Lu, Q.; Ren, B.; Parameswaran, S. Uncertainty and disturbance estimator-based global trajectory tracking control for a quadrotor. IEEE/ASME Trans. Mechatron. 2020, 25, 1519–1530. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Zhu, G.; Chen, X.; Li, Z.; Wang, C.; Su, C.Y. Compound adaptive fuzzy quantized control for quadrotor and its experimental verification. IEEE Trans. Cybern. 2021, 51, 1121–1133. [Google Scholar] [CrossRef]
- Han, H.; Cheng, J.; Xi, Z.; Yao, B. Cascade Flight Control of Quadrotors Based on Deep Reinforcement Learning. IEEE Robot. Autom. Lett. 2022, 7, 11134–11141. [Google Scholar] [CrossRef]
- Wang, N.; Su, S.F.; Han, M.; Chen, W.H. Backpropagating constraints-based trajectory tracking control of a quadrotor with constrained actuator dynamics and complex unknowns. IEEE Trans. Syst. Man. Cybern. Syst. 2019, 49, 1322–1337. [Google Scholar] [CrossRef]
- Yogi, S.C.; Behera, L.; Nahavandi, S. Adaptive Intelligent Minimum Parameter Singularity Free Sliding Mode Controller Design for Quadrotor. IEEE Trans. Autom. Sci. Eng. 2023. early access. [Google Scholar] [CrossRef]
- Wang, Z.; Zou, Y.; Liu, Y.; Meng, Z. Distributed control algorithm for leader–follower formation tracking of multiple quadrotors: Theory and experiment. IEEE/ASME Trans. Mechatron. 2020, 26, 1095–1105. [Google Scholar] [CrossRef]
- Rinaldi, M.; Primatesta, S.; Guglieri, G. A comparative study for control of quadrotor uavs. Appl. Sci. 2023, 13, 3464. [Google Scholar] [CrossRef]
- Maaruf, M.; Mahmoud, M.S.; Ma’arif, A. A survey of control methods for quadrotor uav. Int. J. Robot. Control. Syst. 2022, 2, 652–665. [Google Scholar] [CrossRef]
- Zuo, Z.; Liu, C.; Han, Q.L.; Song, J. Unmanned aerial vehicles: Control methods and future challenges. IEEE/CAA J. Autom. Sin. 2022, 9, 601–614. [Google Scholar] [CrossRef]
- Marshall, J.A.; Sun, W.; L’Afflitto, A. A survey of guidance, navigation, and control systems for autonomous multi-rotor small unmanned aerial systems. Annu. Rev. Control 2021, 52, 390–427. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Quyen, T.V.; Nguyen, C.V.; Le, A.M.; Tran, H.T.; Nguyen, M.T. Control algorithms for UAVs: A comprehensive survey. EAI Endorsed Trans. Ind. Netw. Intell. Syst. 2020, 7, e5. [Google Scholar] [CrossRef]
- Rubí, B.; Pérez, R.; Morcego, B. A survey of path following control strategies for UAVs focused on quadrotors. J. Intell. Robot. Syst. 2020, 98, 241–265. [Google Scholar] [CrossRef]
- Kim, J.; Gadsden, S.A.; Wilkerson, S.A. A comprehensive survey of control strategies for autonomous quadrotors. Can. J. Electr. Comput. Eng. 2019, 43, 3–16. [Google Scholar] [CrossRef]
- Nascimento, T.P.; Saska, M. Position and attitude control of multi-rotor aerial vehicles: A survey. Annu. Rev. Control 2019, 48, 129–146. [Google Scholar] [CrossRef]
- Farid, G.; Hongwei, M.; Ali, S.M.; Liwei, Q. A review on linear and nonlinear control techniques for position and attitude control of a quadrotor. Control Intell. Syst. 2017, 45, 43–57. [Google Scholar]
- L’afflitto, A.; Anderson, R.B.; Mohammadi, K. An introduction to nonlinear robust control for unmanned quadrotor aircraft: How to design control algorithms for quadrotors using sliding mode control and adaptive control techniques [focus on education]. IEEE Control Syst. Mag. 2018, 38, 102–121. [Google Scholar] [CrossRef]
- Shraim, H.; Awada, A.; Youness, R. A survey on quadrotors: Configurations, modeling and identification, control, collision avoidance, fault diagnosis and tolerant control. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 14–33. [Google Scholar] [CrossRef]
- Lee, H.; Kim, H.J. Trajectory tracking control of multirotors from modelling to experiments: A survey. Int. J. Control Autom. Syst. 2017, 15, 281–292. [Google Scholar] [CrossRef]
- Chovancová, A.; Fico, T.; Hubinskỳ, P.; Duchoň, F. Comparison of various quaternion-based control methods applied to quadrotor with disturbance observer and position estimator. Robot. Auton. Syst. 2016, 79, 87–98. [Google Scholar] [CrossRef]
- Amin, R.; Aijun, L.; Shamshirband, S. A review of quadrotor UAV: Control methodologies and performance evaluation. Int. J. Autom. Control 2016, 10, 87–103. [Google Scholar] [CrossRef]
- Zulu, A.; John, S. A review of control algorithms for autonomous quadrotors. arXiv 2016, arXiv:1602.02622. [Google Scholar] [CrossRef]
- Hoffmann, G.; Huang, H.; Waslander, S.; Tomlin, C. Quadrotor helicopter flight dynamics and control: Theory and experiment. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2007; p. 6461. [Google Scholar]
- Mistler, V.; Benallegue, A.; M’sirdi, N. Exact linearization and noninteracting control of a 4 rotors helicopter via dynamic feedback. In Proceedings of the 10th IEEE International Workshop on Robot and Human Interactive Communication. Roman 2001 (Cat. no. 01th8591), Bordeaux, Paris, France, 18–21 September 2001; pp. 586–593. [Google Scholar]
- Altug, E.; Ostrowski, J.P.; Mahony, R. Control of a quadrotor helicopter using visual feedback. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 1, pp. 72–77. [Google Scholar]
- Hamel, T.; Mahony, R.; Lozano, R.; Ostrowski, J. Dynamic modelling and configuration stabilization for an X4-flyer. IFAC Proc. Vol. 2002, 35, 217–222. [Google Scholar] [CrossRef]
- Bouabdallah, S.; Murrieri, P.; Siegwart, R. Design and control of an indoor micro quadrotor. In Proceedings of the IEEE International Conference on Robotics and Automation, 2004, Proceedings. ICRA’04, New Orleans, LA, USA, 26 April–1 May 2004; Volume 5, pp. 4393–4398. [Google Scholar]
- Bouabdallah, S.; Noth, A.; Siegwart, R. PID vs. LQ control techniques applied to an indoor micro quadrotor. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2451–2456. [Google Scholar]
- Bouabdallah, S.; Siegwart, R. Backstepping and sliding-mode techniques applied to an indoor micro quadrotor. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 2247–2252. [Google Scholar]
- Bouabdallah, S.; Siegwart, R. Full control of a quadrotor. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 153–158. [Google Scholar]
- Adigbli, P.; Grand, C.; Mouret, J.B.; Doncieux, S. Nonlinear attitude and position control of a micro quadrotor using sliding mode and backstepping techniques. In Proceedings of the 7th European Micro Air Vehicle Conference (MAV07), Toulouse, France, 17–21 September 2007; pp. 1–9. [Google Scholar]
- Hoffmann, G.; Waslander, S.; Tomlin, C. Quadrotor helicopter trajectory tracking control. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; p. 7410. [Google Scholar]
- Huang, H.; Hoffmann, G.M.; Waslander, S.L.; Tomlin, C.J. Aerodynamics and control of autonomous quadrotor helicopters in aggressive maneuvering. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3277–3282. [Google Scholar]
- Waslander, S.; Wang, C. Wind disturbance estimation and rejection for quadrotor position control. In Proceedings of the AIAA Infotech@ Aerospace Conference and AIAA Unmanned… Unlimited Conference, Seattle, WA, USA, 6–9 April 2009; p. 1983. [Google Scholar]
- Madani, T.; Benallegue, A. Backstepping control for a quadrotor helicopter. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–13 October 2006; pp. 3255–3260. [Google Scholar]
- Madani, T.; Benallegue, A. Control of a quadrotor mini-helicopter via full state backstepping technique. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 1515–1520. [Google Scholar]
- Zuo, Z. Trajectory tracking control design with command-filtered compensation for a quadrotor. IET Control Theory Appl. 2010, 4, 2343–2355. [Google Scholar] [CrossRef]
- Kendoul, F.; Yu, Z.; Nonami, K. Guidance and nonlinear control system for autonomous flight of minirotorcraft unmanned aerial vehicles. J. Field Robot. 2010, 27, 311–334. [Google Scholar] [CrossRef]
- Lee, T.; Leok, M.; McClamroch, N.H. Geometric tracking control of a quadrotor UAV on SE (3). In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 5–17 December 2010; pp. 5420–5425. [Google Scholar]
- Lee, T.; Leok, M.; McClamroch, N.H. Nonlinear robust tracking control of a quadrotor UAV on SE (3). Asian J. Control 2013, 15, 391–408. [Google Scholar] [CrossRef]
- Mellinger, D.; Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2520–2525. [Google Scholar]
- Mahony, R.; Kumar, V.; Corke, P. Multirotor aerial vehicles: Modeling, estimation, and control of quadrotor. IEEE Robot. Autom. Mag. 2012, 19, 20–32. [Google Scholar] [CrossRef]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. Model predictive quadrotor control: Attitude, altitude and position experimental studies. IET Control. Theory Appl. 2012, 6, 1812–1827. [Google Scholar] [CrossRef]
- Alonso-Mora, J.; Breitenmoser, A.; Rufli, M.; Siegwart, R.; Beardsley, P. Multi-robot system for artistic pattern formation. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 4512–4517. [Google Scholar]
- Burri, M.; Nikolic, J.; Hürzeler, C.; Caprari, G.; Siegwart, R. Aerial service robots for visual inspection of thermal power plant boiler systems. In Proceedings of the 2012 2nd International Conference on Applied Robotics for the Power Industry (CARPI), Zurich, Switzerland, 11–13 September 2012; pp. 70–75. [Google Scholar]
- Kushleyev, A.; Mellinger, D.; Powers, C.; Kumar, V. Towards a swarm of agile micro quadrotors. Auton. Robot. 2013, 35, 287–300. [Google Scholar] [CrossRef]
- Sreenath, K.; Michael, N.; Kumar, V. Trajectory generation and control of a quadrotor with a cable-suspended load-a differentially-flat hybrid system. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4888–4895. [Google Scholar]
- Shen, S.; Mulgaonkar, Y.; Michael, N.; Kumar, V. Vision-Based State Estimation and Trajectory Control Towards High-Speed Flight with a Quadrotor. Robot. Sci. Syst. 2013, 1, 32. [Google Scholar]
- Powers, C.; Mellinger, D.; Kushleyev, A.; Kothmann, B.; Kumar, V. Influence of aerodynamics and proximity effects in quadrotor flight. In Proceedings of the Experimental Robotics: The 13th International Symposium on Experimental Robotics, Québec City, QC, Canada, 18–21 June 2012; Springer: Berlin/Heidelberg, Germany, 2013; pp. 289–302. [Google Scholar]
- Alexis, K.; Papachristos, C.; Siegwart, R.; Tzes, A. Robust explicit model predictive flight control of unmanned rotorcrafts: Design and experimental evaluation. In Proceedings of the 2014 European Control Conference (ECC), Strasbourg, France, 24–27 June 2014; pp. 498–503. [Google Scholar]
- Kamel, M.; Burri, M.; Siegwart, R. Linear vs nonlinear mpc for trajectory tracking applied to rotary wing micro aerial vehicles. IFAC-PapersOnLine 2017, 50, 3463–3469. [Google Scholar] [CrossRef]
- Xu, R.; Ozguner, U. Sliding mode control of a quadrotor helicopter. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 4957–4962. [Google Scholar]
- Lee, D.; Jin Kim, H.; Sastry, S. Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter. Int. J. Control Autom. Syst. 2009, 7, 419–428. [Google Scholar] [CrossRef]
- Pham, H.T.; Dang, C.T.; Pham, T.B.; Truong, N.V. Hybrid Terminal Sliding Mode Control and quadrotor’s vision based ground object tracking. In Proceedings of the 2013 International Conference on Control, Automation and Information Sciences (ICCAIS), Nha Trang, Vietnam, 25–28 November 2013; pp. 334–340. [Google Scholar]
- Lim, H.; Park, J.; Lee, D.; Kim, H.J. Build your own quadrotor: Open-source projects on unmanned aerial vehicles. IEEE Robot. Autom. Mag. 2012, 19, 33–45. [Google Scholar] [CrossRef]
- Tomic, T.; Schmid, K.; Lutz, P.; Domel, A.; Kassecker, M.; Mair, E.; Grixa, I.L.; Ruess, F.; Suppa, M.; Burschka, D. Toward a fully autonomous UAV: Research platform for indoor and outdoor urban search and rescue. IEEE Robot. Autom. Mag. 2012, 19, 46–56. [Google Scholar] [CrossRef]
- Scholten, J.L.; Fumagalli, M.; Stramigioli, S.; Carloni, R. Interaction control of an UAV endowed with a manipulator. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4910–4915. [Google Scholar]
- Sa, I.; Corke, P. System identification, estimation and control for a cost effective open-source quadcopter. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St Paul, MI, USA, 14–18 May 2012; pp. 2202–2209. [Google Scholar]
- Mueller, M.W.; D’Andrea, R. Stability and control of a quadrocopter despite the complete loss of one, two, or three propellers. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 45–52. [Google Scholar]
- Escareño, J.; Salazar, S.; Romero, H.; Lozano, R. Trajectory control of a quadrotor subject to 2D wind disturbances: Robust-adaptive approach. J. Intell. Robot. Syst. 2013, 70, 51–63. [Google Scholar] [CrossRef]
- Goodarzi, F.A.; Lee, D.; Lee, T. Geometric adaptive tracking control of a quadrotor unmanned aerial vehicle on SE (3) for agile maneuvers. J. Dyn. Syst. Meas. Control 2015, 137, 091007. [Google Scholar] [CrossRef]
- Baca, T.; Loianno, G.; Saska, M. Embedded model predictive control of unmanned micro aerial vehicles. In Proceedings of the 2016 21st International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 29 August–1 September 2016; pp. 992–997. [Google Scholar]
- Loianno, G.; Brunner, C.; McGrath, G.; Kumar, V. Estimation, control, and planning for aggressive flight with a small quadrotor with a single camera and IMU. IEEE Robot. Autom. Lett. 2016, 2, 404–411. [Google Scholar] [CrossRef]
- Svacha, J.; Mohta, K.; Kumar, V. Improving quadrotor trajectory tracking by compensating for aerodynamic effects. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 860–866. [Google Scholar]
- Faessler, M.; Franchi, A.; Scaramuzza, D. Differential flatness of quadrotor dynamics subject to rotor drag for accurate tracking of high-speed trajectories. IEEE Robot. Autom. Lett. 2018, 3, 620–626. [Google Scholar] [CrossRef]
- Mohta, K.; Watterson, M.; Mulgaonkar, Y.; Liu, S.; Qu, C.; Makineni, A.; Saulnier, K.; Sun, K.; Zhu, A.; Delmerico, J.; et al. Fast, autonomous flight in GPS-denied and cluttered environments. J. Field Robot. 2018, 35, 101–120. [Google Scholar] [CrossRef]
- Mohta, K.; Sun, K.; Liu, S.; Watterson, M.; Pfrommer, B.; Svacha, J.; Mulgaonkar, Y.; Taylor, C.J.; Kumar, V. Experiments in fast, autonomous, gps-denied quadrotor flight. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 7832–7839. [Google Scholar]
- Tal, E.; Karaman, S. Accurate tracking of aggressive quadrotor trajectories using incremental nonlinear dynamic inversion and differential flatness. IEEE Trans. Control. Syst. Technol. 2020, 29, 1203–1218. [Google Scholar] [CrossRef]
- Foehn, P.; Romero, A.; Scaramuzza, D. Time-optimal planning for quadrotor waypoint flight. Sci. Robot. 2021, 6, eabh1221. [Google Scholar] [CrossRef] [PubMed]
- Torrente, G.; Kaufmann, E.; Föhn, P.; Scaramuzza, D. Data-driven MPC for quadrotors. IEEE Robot. Autom. Lett. 2021, 6, 3769–3776. [Google Scholar] [CrossRef]
- Hanover, D.; Foehn, P.; Sun, S.; Kaufmann, E.; Scaramuzza, D. Performance, precision, and payloads: Adaptive nonlinear mpc for quadrotors. IEEE Robot. Autom. Lett. 2021, 7, 690–697. [Google Scholar] [CrossRef]
- Jia, J.; Guo, K.; Yu, X.; Zhao, W.; Guo, L. Accurate high-maneuvering trajectory tracking for quadrotors: A drag utilization method. IEEE Robot. Autom. Lett. 2022, 7, 6966–6973. [Google Scholar] [CrossRef]
- Lu, G.; Xu, W.; Zhang, F. On-manifold model predictive control for trajectory tracking on robotic systems. IEEE Trans. Ind. Electron. 2022, 70, 9192–9202. [Google Scholar] [CrossRef]
- Gomaa, M.A.; De Silva, O.; Mann, G.K.; Gosine, R.G. Computationally Efficient Stability-Based Nonlinear Model Predictive Control Design for Quadrotor Aerial Vehicles. IEEE Trans. Control Syst. Technol. 2022, 31, 615–630. [Google Scholar] [CrossRef]
- Liu, W.; Ren, Y.; Zhang, F. Integrated Planning and Control for Quadrotor Navigation in Presence of Suddenly Appearing Objects and Disturbances. IEEE Robot. Autom. Lett. 2023, 9, 899–906. [Google Scholar] [CrossRef]
- Song, Y.; Romero, A.; Müller, M.; Koltun, V.; Scaramuzza, D. Reaching the limit in autonomous racing: Optimal control versus reinforcement learning. Sci. Robot. 2023, 8, eadg1462. [Google Scholar] [CrossRef]
- Jia, J.; Guo, K.; Yu, X.; Guo, L.; Xie, L. Agile flight control under multiple disturbances for quadrotor: Algorithms and evaluation. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3049–3062. [Google Scholar] [CrossRef]
- Foehn, P.; Kaufmann, E.; Romero, A.; Penicka, R.; Sun, S.; Bauersfeld, L.; Laengle, T.; Cioffi, G.; Song, Y.; Loquercio, A.; et al. Agilicious: Open-source and open-hardware agile quadrotor for vision-based flight. Sci. Robot. 2022, 7, eabl6259. [Google Scholar] [CrossRef]
- Hentzen, D.; Stastny, T.; Siegwart, R.; Brockers, R. Disturbance estimation and rejection for high-precision multirotor position control. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 2797–2804. [Google Scholar]
- Song, Y.; Scaramuzza, D. Policy search for model predictive control with application to agile drone flight. IEEE Trans. Robot. 2022, 38, 2114–2130. [Google Scholar] [CrossRef]
- Hwangbo, J.; Sa, I.; Siegwart, R.; Hutter, M. Control of a quadrotor with reinforcement learning. IEEE Robot. Autom. Lett. 2017, 2, 2096–2103. [Google Scholar] [CrossRef]
- Molchanov, A.; Chen, T.; Hönig, W.; Preiss, J.A.; Ayanian, N.; Sukhatme, G.S. Sim-to-(multi)-real: Transfer of low-level robust control policies to multiple quadrotors. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 59–66. [Google Scholar]
- Pi, C.H.; Ye, W.Y.; Cheng, S. Robust quadrotor control through reinforcement learning with disturbance compensation. Appl. Sci. 2021, 11, 3257. [Google Scholar] [CrossRef]
- Pi, C.H.; Hu, K.C.; Cheng, S.; Wu, I.C. Low-level autonomous control and tracking of quadrotor using reinforcement learning. Control Eng. Pract. 2020, 95, 104222. [Google Scholar] [CrossRef]
- Fu, J.; Song, Y.; Wu, Y.; Yu, F.; Scaramuzza, D. Learning deep sensorimotor policies for vision-based autonomous drone racing. arXiv 2022, arXiv:2210.14985. [Google Scholar]
- Loquercio, A.; Kaufmann, E.; Ranftl, R.; Müller, M.; Koltun, V.; Scaramuzza, D. Learning high-speed flight in the wild. Sci. Robot. 2021, 6, eabg5810. [Google Scholar] [CrossRef] [PubMed]
- Greatwood, C.; Richards, A.G. Reinforcement learning and model predictive control for robust embedded quadrotor guidance and control. Auton. Robot. 2019, 43, 1681–1693. [Google Scholar] [CrossRef]
- Zhang, T.; Kahn, G.; Levine, S.; Abbeel, P. Learning deep control policies for autonomous aerial vehicles with mpc-guided policy search. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 528–535. [Google Scholar]
- Song, Y.; Scaramuzza, D. Learning high-level policies for model predictive control. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 7629–7636. [Google Scholar]
- Yuan, Z.; Hall, A.W.; Zhou, S.; Brunke, L.; Greeff, M.; Panerati, J.; Schoellig, A.P. Safe-control-Gym: A unified benchmark suite for safe learning-based control and reinforcement learning in robotics. IEEE Robot. Autom. Lett. 2022, 7, 11142–11149. [Google Scholar] [CrossRef]
- Xie, W.; Yu, G.; Cabecinhas, D.; Cunha, R.; Silvestre, C. Global saturated tracking control of a quadcopter with experimental validation. IEEE Control Syst. Lett. 2020, 5, 169–174. [Google Scholar] [CrossRef]
- Zhu, X.Z.; Cabecinhas, D.; Xie, W.; Casau, P.; Silvestre, C.; Batista, P.; Oliveira, P. Kalman–Bucy filter-based tracking controller design and experimental validations for a quadcopter with parametric uncertainties and disturbances. Int. J. Syst. Sci. 2023, 54, 17–41. [Google Scholar] [CrossRef]
- Aguiar, A.P.; Hespanha, J.P. Trajectory-tracking and path-following of underactuated autonomous vehicles with parametric modeling uncertainty. IEEE Trans. Autom. Control 2007, 52, 1362–1379. [Google Scholar] [CrossRef]
- Rw, B. Asymptotic Stability and Feedback Stabilization, Differential Geometric Control Theory. Birkhauser 1983, 181, 181–191. [Google Scholar]
- Xie, W.; Cabecinhas, D.; Cunha, R.; Silvestre, C. Adaptive backstepping control of a quadcopter with uncertain vehicle mass, moment of inertia, and disturbances. IEEE Trans. Ind. Electron. 2022, 69, 549–559. [Google Scholar] [CrossRef]
- Choi, Y.C.; Ahn, H.S. Nonlinear control of quadrotor for point tracking: Actual implementation and experimental tests. IEEE/ASME Trans. Mechatron. 2015, 20, 1179–1192. [Google Scholar] [CrossRef]
- Zhang, X.; Xian, B.; Zhao, B.; Zhang, Y. Autonomous flight control of a nano quadrotor helicopter in a GPS-denied environment using on-board vision. IEEE Trans. Ind. Electron. 2015, 62, 6392–6403. [Google Scholar] [CrossRef]
- Kayacan, E.; Maslim, R. Type-2 fuzzy logic trajectory tracking control of quadrotor VTOL aircraft with elliptic membership functions. IEEE/ASME Trans. Mechatron. 2016, 22, 339–348. [Google Scholar] [CrossRef]
- Xu, L.X.; Ma, H.J.; Guo, D.; Xie, A.H.; Song, D.L. Backstepping sliding-mode and cascade active disturbance rejection control for a quadrotor UAV. IEEE/ASME Trans. Mechatron. 2020, 25, 2743–2753. [Google Scholar] [CrossRef]
- Tripathi, V.K.; Kamath, A.K.; Behera, L.; Verma, N.K.; Nahavandi, S. Finite-time super twisting sliding mode controller based on higher-order sliding mode observer for real-time trajectory tracking of a quadrotor. IET Control Theory Appl. 2020, 14, 2359–2371. [Google Scholar] [CrossRef]
- Rubí, B.; Morcego, B.; Pérez, R. Deep reinforcement learning for quadrotor path following with adaptive velocity. Auton. Robot. 2021, 45, 119–134. [Google Scholar] [CrossRef]
- Tripathi, V.K.; Kamath, A.K.; Behera, L.; Verma, N.K.; Nahavandi, S. An adaptive fast terminal sliding-mode controller with power rate proportional reaching law for quadrotor position and altitude tracking. IEEE Trans. Syst. Man. Cybern. Syst. 2022, 52, 3612–3625. [Google Scholar] [CrossRef]
- Jiang, B.; Li, B.; Zhou, W.; Lo, L.Y.; Chen, C.K.; Wen, C.Y. Neural network based model predictive control for a quadrotor UAV. Aerospace 2022, 9, 460. [Google Scholar] [CrossRef]
- Hua, H.; Fang, Y. A Novel Reinforcement Learning-Based Robust Control Strategy for a Quadrotor. IEEE Trans. Ind. Electron. 2023, 70, 2812–2821. [Google Scholar] [CrossRef]
- Chen, F.; Lei, W.; Zhang, K.; Tao, G.; Jiang, B. A novel nonlinear resilient control for a quadrotor UAV via backstepping control and nonlinear disturbance observer. Nonlinear Dyn. 2016, 85, 1281–1295. [Google Scholar] [CrossRef]
- Ramirez-Rodriguez, H.; Parra-Vega, V.; Sanchez-Orta, A.; Garcia-Salazar, O. Robust backstepping control based on integral sliding modes for tracking of quadrotors. J. Intell. Robot. Syst. 2014, 73, 51–66. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Zhu, G.; Chen, X.; Su, C.Y. Discrete-time adaptive neural tracking control and its experiments for quadrotor unmanned aerial vehicle systems. IEEE/ASME Trans. Mechatron. 2023, 28, 1201–1212. [Google Scholar] [CrossRef]
- Jiang, T.; Lin, D.; Song, T. Finite-time backstepping control for quadrotors with disturbances and input constraints. IEEE Access 2018, 6, 62037–62049. [Google Scholar] [CrossRef]
- Liu, K.; Wang, R. Antisaturation command filtered backstepping control-based disturbance rejection for a quadarotor UAV. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3577–3581. [Google Scholar] [CrossRef]
- Younes, Y.A.; Drak, A.; Noura, H.; Rabhi, A.; Hajjaji, A.E. Robust model-free control applied to a quadrotor UAV. J. Intell. Robot. Syst. 2016, 84, 37–52. [Google Scholar] [CrossRef]
- Zheng, E.H.; Xiong, J.J.; Luo, J.L. Second order sliding mode control for a quadrotor UAV. ISA Trans. 2014, 53, 1350–1356. [Google Scholar] [CrossRef]
- Xiong, J.J.; Zheng, E.H. Position and attitude tracking control for a quadrotor UAV. ISA Trans. 2014, 53, 725–731. [Google Scholar] [CrossRef] [PubMed]
- Jayakrishnan, H. Position and attitude control of a quadrotor UAV using super twisting sliding mode. IFAC-PapersOnLine 2016, 49, 284–289. [Google Scholar] [CrossRef]
- Xu, B. Composite learning finite-time control with application to quadrotors. IEEE Trans. Syst. Man. Cybern. Syst. 2017, 48, 1806–1815. [Google Scholar] [CrossRef]
- Jia, Z.; Yu, J.; Mei, Y.; Chen, Y.; Shen, Y.; Ai, X. Integral backstepping sliding mode control for quadrotor helicopter under external uncertain disturbances. Aerosp. Sci. Technol. 2017, 68, 299–307. [Google Scholar] [CrossRef]
- Xiong, J.J.; Zhang, G.B. Global fast dynamic terminal sliding mode control for a quadrotor UAV. ISA Trans. 2017, 66, 233–240. [Google Scholar] [CrossRef] [PubMed]
- Nekoukar, V.; Dehkordi, N.M. Robust path tracking of a quadrotor using adaptive fuzzy terminal sliding mode control. Control Eng. Pract. 2021, 110, 104763. [Google Scholar] [CrossRef]
- Ríos, H.; Falcón, R.; González, O.A.; Dzul, A. Continuous sliding-mode control strategies for quadrotor robust tracking: Real-time application. IEEE Trans. Ind. Electron. 2019, 66, 1264–1272. [Google Scholar] [CrossRef]
- Zhao, B.; Xian, B.; Zhang, Y.; Zhang, X. Nonlinear robust adaptive tracking control of a quadrotor UAV via immersion and invariance methodology. IEEE Trans. Ind. Electron. 2014, 62, 2891–2902. [Google Scholar] [CrossRef]
- Cabecinhas, D.; Cunha, R.; Silvestre, C. A nonlinear quadrotor trajectory tracking controller with disturbance rejection. Control Eng. Pract. 2014, 26, 1–10. [Google Scholar] [CrossRef]
- Ha, C.; Zuo, Z.; Choi, F.B.; Lee, D. Passivity-based adaptive backstepping control of quadrotor-type UAVs. Robot. Auton. Syst. 2014, 62, 1305–1315. [Google Scholar] [CrossRef]
- Islam, S.; Liu, P.X.; El Saddik, A. Robust control of four-rotor unmanned aerial vehicle with disturbance uncertainty. IEEE Trans. Ind. Electron. 2015, 62, 1563–1571. [Google Scholar] [CrossRef]
- Ma, D.; Xia, Y.; Li, T.; Chang, K. Active disturbance rejection and predictive control strategy for a quadrotor helicopter. IET Control Theory Appl. 2016, 10, 2213–2222. [Google Scholar] [CrossRef]
- Liu, H.; Li, D.; Zuo, Z.; Zhong, Y. Robust three-loop trajectory tracking control for quadrotors with multiple uncertainties. IEEE Trans. Ind. Electron. 2016, 63, 2263–2274. [Google Scholar] [CrossRef]
- Wang, C.; Song, B.; Huang, P.; Tang, C. Trajectory tracking control for quadrotor robot subject to payload variation and wind gust disturbance. J. Intell. Robot. Syst. 2016, 83, 315–333. [Google Scholar] [CrossRef]
- Xiao, B.; Yin, S. A new disturbance attenuation control scheme for quadrotor unmanned aerial vehicles. IEEE Trans. Ind. Inform. 2017, 13, 2922–2932. [Google Scholar] [CrossRef]
- Liu, H.; Zhao, W.; Zuo, Z.; Zhong, Y. Robust control for quadrotors with multiple time-varying uncertainties and delays. IEEE Trans. Ind. Electron. 2017, 64, 1303–1312. [Google Scholar] [CrossRef]
- Zuo, Z.; Mallikarjunan, S. L1 Adaptive Backstepping for Robust Trajectory Tracking of UAVs. IEEE Trans. Ind. Electron. 2016, 64, 2944–2954. [Google Scholar] [CrossRef]
- Li, C.; Zhang, Y.; Li, P. Full control of a quadrotor using parameter-scheduled backstepping method: Implementation and experimental tests. Nonlinear Dyn. 2017, 89, 1259–1278. [Google Scholar] [CrossRef]
- Chen, M.; Xiong, S.; Wu, Q. Tracking flight control of quadrotor based on disturbance observer. IEEE Trans. Syst. Man. Cybern. Syst. 2019, 51, 1414–1423. [Google Scholar] [CrossRef]
- Guo, K.; Jia, J.; Yu, X.; Guo, L.; Xie, L. Multiple observers based anti-disturbance control for a quadrotor UAV against payload and wind disturbances. Control Eng. Pract. 2020, 102, 104560. [Google Scholar] [CrossRef]
- Bisheban, M.; Lee, T. Geometric adaptive control with neural networks for a quadrotor in wind fields. IEEE Trans. Control. Syst. Technol. 2020, 29, 1533–1548. [Google Scholar] [CrossRef]
- Hua, H.; Fang, Y.; Zhang, X.; Lu, B. A novel robust observer-based nonlinear trajectory tracking control strategy for quadrotors. IEEE Trans. Control Syst. Technol. 2020, 29, 1952–1963. [Google Scholar] [CrossRef]
- Cervantes-Rojas, J.S.; Muñoz, F.; Chairez, I.; González-Hernández, I.; Salazar, S. Adaptive tracking control of an unmanned aerial system based on a dynamic neural-fuzzy disturbance estimator. ISA Trans. 2020, 101, 309–326. [Google Scholar] [CrossRef]
- Chen, Z.; Nian, X.; Xu, P.; Wu, H. Robust Adaptive Tracking Control of a Quadrotor Helicopter with Uncertainties. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 June 2021; p. 7748. [Google Scholar]
- Liu, P.; Ye, R.; Shi, K.; Yan, B. Full backstepping control in dynamic systems with air disturbances optimal estimation of a quadrotor. IEEE Access 2021, 9, 34206–34220. [Google Scholar] [CrossRef]
- Chen, L.; Liu, Z.; Dang, Q.; Zhao, W.; Wang, G. Robust trajectory tracking control for a quadrotor using recursive sliding mode control and nonlinear extended state observer. Aerosp. Sci. Technol. 2022, 128, 107749. [Google Scholar] [CrossRef]
- Liang, W.; Chen, Z.; Yao, B. Geometric adaptive robust hierarchical control for quadrotors with aerodynamic damping and complete inertia compensation. IEEE Trans. Ind. Electron. 2022, 69, 13213–13224. [Google Scholar] [CrossRef]
- Li, S.; Sun, Z. A generalized proportional integral observer–based robust tracking design approach for quadrotor unmanned aerial vehicle. Int. J. Adv. Robot. Syst. 2022, 19, 17298806221117052. [Google Scholar] [CrossRef]
- Zhang, X.; Zhuang, Y.; Zhang, X.; Fang, Y. A Novel Asymptotic Robust Tracking Control Strategy for Rotorcraft UAVs. IEEE Trans. Autom. Sci. Eng. 2023, 20, 2338–2349. [Google Scholar] [CrossRef]
- Yogi, S.C.; Kamath, A.K.; Singh, P.; Behera, L. Trajectory Tracking Control of a Quadrotor UAV using an Auto-tuning Robust Sliding Mode Controller. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 345–353. [Google Scholar]
- Lopez-Sanchez, I.; Moyrón, J.; Moreno-Valenzuela, J. Adaptive neural network-based trajectory tracking outer loop control for a quadrotor. Aerosp. Sci. Technol. 2022, 129, 107847. [Google Scholar] [CrossRef]
- Kong, L.; Reis, J.; He, W.; Silvestre, C. Experimental Validation of a Robust Prescribed Performance Nonlinear Controller for an Unmanned Aerial Vehicle With Unknown Mass. IEEE/ASME Trans. Mechatron. 2023. early access. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust adaptive backstepping fast terminal sliding mode controller for uncertain quadrotor UAV. Aerosp. Sci. Technol. 2019, 93, 105306. [Google Scholar] [CrossRef]
- Shao, X.; Liu, J.; Cao, H.; Shen, C.; Wang, H. Robust dynamic surface trajectory tracking control for a quadrotor UAV via extended state observer. Int. J. Robust Nonlinear Control 2018, 28, 2700–2719. [Google Scholar] [CrossRef]
- Wang, R.; Liu, J. Trajectory tracking control of a 6-DOF quadrotor UAV with input saturation via backstepping. J. Frankl. Inst. 2018, 355, 3288–3309. [Google Scholar] [CrossRef]
- Zuo, Z.; Wang, C. Adaptive trajectory tracking control of output constrained multi-rotors systems. IET Control Theory Appl. 2014, 8, 1163–1174. [Google Scholar] [CrossRef]
- Song, Y.; He, L.; Zhang, D.; Qian, J.; Fu, J. Neuroadaptive fault-tolerant control of quadrotor UAVs: A more affordable solution. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 1975–1983. [Google Scholar] [CrossRef] [PubMed]
- Mofid, O.; Mobayen, S. Adaptive sliding mode control for finite-time stability of quad-rotor UAVs with parametric uncertainties. ISA Trans. 2018, 72, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Baca, T.; Petrlik, M.; Vrba, M.; Spurny, V.; Penicka, R.; Hert, D.; Saska, M. The MRS UAV system: Pushing the frontiers of reproducible research, real-world deployment, and education with autonomous unmanned aerial vehicles. J. Intell. Robot. Syst. 2021, 102, 26. [Google Scholar] [CrossRef]
- Baca, T.; Hert, D.; Loianno, G.; Saska, M.; Kumar, V. Model predictive trajectory tracking and collision avoidance for reliable outdoor deployment of unmanned aerial vehicles. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 6753–6760. [Google Scholar]
- Yang, J.; Cai, Z.; Zhao, J.; Wang, Z.; Ding, Y.; Wang, Y. INDI-based aggressive quadrotor flight control with position and attitude constraints. Robot. Auton. Syst. 2023, 159, 104292. [Google Scholar] [CrossRef]
- El Houm, Y.; Abbou, A.; Labbadi, M.; Cherkaoui, M. Optimal new sliding mode controller combined with modified supertwisting algorithm for a perturbed quadrotor UAV. Int. J. Aerosp. Eng. 2020, 2020, 1–10. [Google Scholar] [CrossRef]


| Variable | Meaning | Variable | Meaning |
|---|---|---|---|
| position | f | input force | |
| v | velocity | input torque | |
| a | acceleration | d | disturbance force |
| attitude angles | position error | ||
| angular rate | desired value of ⋄ | ||
| motor angular speed | estimated ⋄ | ||
| m | mass | P gain | |
| aerodynamic param | D gain | ||
| I | moment of inertia | k | design parameters |
| motor’s I | observer/Bk variables | ||
| g | gravitational acc | method-dependent variables |
| Ref. | Yr | Ctt | Model | CM | Information | Ver | PS | m kg | max v, a | Exp Con | Results | Github |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| [48] | 11 | 2k+ | ▲ ▲ | ● | PA, Geo | ♦ | MC | 0.5 | 3.6 | HST | MTE 8 | Maintained |
| [50] | 11 | 390+ | ▲ ▲ | ● | MPC, | ♦ | MC | 1.1 | - | Line, wind | MTE 2.64 | N/A |
| [57] | 14 | 20+ | ▲ ▲ ▲ | ● | MPC, | ♦ | MC | 0.65 | 1 | Hel, fan P | - | [C1], Last 2016 |
| [68] | 15 | 100+ | ▲ ▲ ▲ | ● ● | PA, Geo | ♦ | MC | 0.76 | 1 | Lissajous | - | [C2], Last 2022 |
| [69] | 16 | 120+ | ▲ ▲ | ● | MPC, , 2.2s | ♦ | MC | - | - | Outdoors | SD 13 | [C3], Last 2018 |
| [70] | 16 | 280+ | ▲ ▲ | ● | PA, Geo | ♦ | Cam | 0.25 | 5, 1.5 g | HST | - | N/A |
| [58] | 17 | 190+ | ▲ ▲ ▲ ▲ | ● | MPC, , 2-s | ♦ | MC | 3.42 | - | HST, wind | RMSE 7.1 | [C4], Last 2018 |
| [71] | 17 | 50+ | ▲ ▲ ▲ | ● | PA, Geo | ♦ | - | - | 4 | HST | RMSE 6.5 | N/A |
| [72] | 17 | 260+ | ▲ ▲ ▲ | ● | PA, Geo | ♦ | MC | 0.61 | 5, 1.8 g | Lem | MTE 2.23 | [C5], Last 2021 |
| [73] | 18 | 170+ | ▲ ▲ | ● | PA, Geo | ♦ | Cam | 0.61 | 7 | HST | - | [C6], Last 2023 |
| [74] | 18 | 40+ | ▲ ▲ ▲ | ● | PA, Geo | ♦ | Cam | - | 15 | HST | MTE 100 | [C6], Last 2023 |
| [75] | 20 | 130+ | ▲ ▲ ▲ | ● | PA, VI | ♦ | Cam | - | 12.9, 2.1 g | HST | RMSE 6.6 | N/A |
| [76] | 21 | 90+ | ▲ ▲ | ● | MPC, , 0.05-s | ♦ | MC | 1 | 18, 4 g | HST | - | [C7], Last 2021 |
| [77] | 21 | 120+ | ▲ ▲ | ●● | MPC, , 0.05-s | ♦ | MC | 1 | 12, 4 g | Lem | RMSE 2.4 | [C8], Last 2021 |
| [78] | 21 | 40+ | ▲ ▲ | ●● | MPC, , 0.05-s | ♦ | MC | 0.75 | 20, 4 g | HST | MTE 50 | N/A |
| [79] | 22 | <10 | ▲ ▲ ▲ ▲ | ● ● | PA, Geo | ♦ | MC | - | 4 | Cir, wind | RMSE 9 | N/A |
| [80] | 23 | <10 | ▲ ▲ | ● | MPC, | ♦ | MC | 1.1 | 5, 2 g | HST | MTE 8 | N/A |
| [81] | 23 | <10 | ▲ ▲ ▲ | ● | MPC, shortest possible N | ♦ | MC | 0.71 | - | Cir | MTE 5 | N/A |
| [82] | 23 | <10 | ▲ ▲ ▲ | ● | MPC, comp. of N | ♦ | LiDAR | 1.5 | 5.86 | HST | - | [C9], Last 2023 |
| [83] | 23 | 10+ | - | ● | RL, Gate Progress Objective | ♦ | MC | 0.52 | 30, 12 g | HST | - | N/A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Asignacion, A., Jr.; Satoshi, S. Historical and Current Landscapes of Autonomous Quadrotor Control: An Early-Career Researchers’ Guide. Drones 2024, 8, 72. https://doi.org/10.3390/drones8030072
Asignacion A Jr., Satoshi S. Historical and Current Landscapes of Autonomous Quadrotor Control: An Early-Career Researchers’ Guide. Drones. 2024; 8(3):72. https://doi.org/10.3390/drones8030072
Chicago/Turabian StyleAsignacion, Abner, Jr., and Suzuki Satoshi. 2024. "Historical and Current Landscapes of Autonomous Quadrotor Control: An Early-Career Researchers’ Guide" Drones 8, no. 3: 72. https://doi.org/10.3390/drones8030072
APA StyleAsignacion, A., Jr., & Satoshi, S. (2024). Historical and Current Landscapes of Autonomous Quadrotor Control: An Early-Career Researchers’ Guide. Drones, 8(3), 72. https://doi.org/10.3390/drones8030072