



Fractional-Order Control Algorithm for Tello EDU Quadrotor Drone Safe Landing during Disturbance on Propeller


 ,
,  , , ,
, , ,  and
and
Abstract
1. Introduction
2. Related Works
- The study aims to develop a comprehensive plan to ensure the safe landing of quadrotor drones in the event of propeller failure, using the Tello EDU quadrotor drone for testing control techniques in diverse indoor environments.
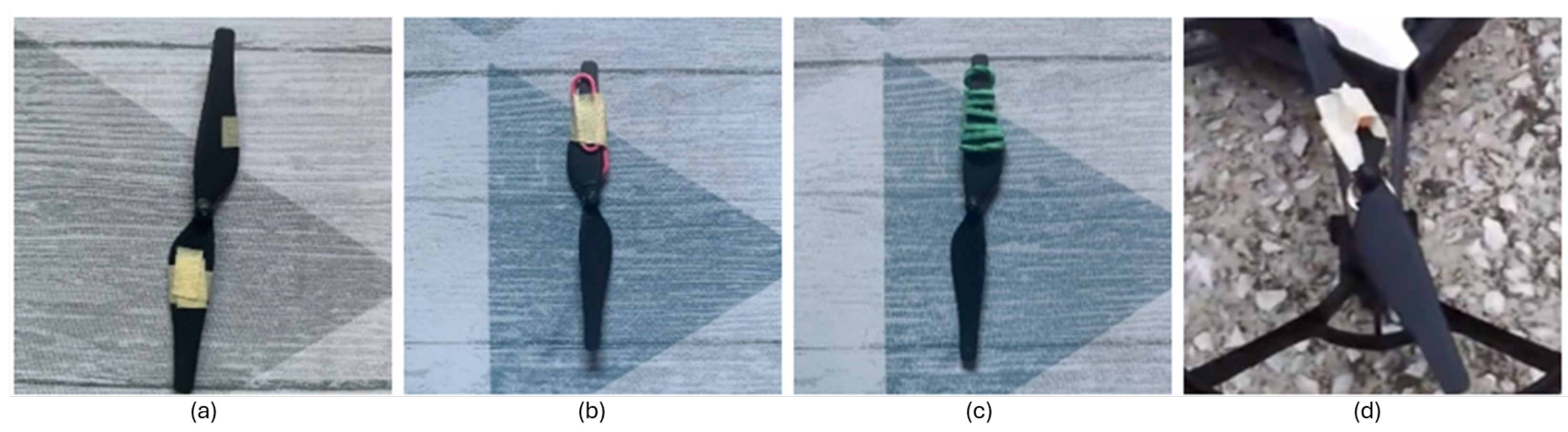
- Different propeller failure scenarios are created using commonly available materials (masking tape, paper clip, rubber band, and small stone) that affect the drone’s performance during the flight.
- The main goal is to develop a fractional-order PID (FOPID) control strategy to adapt the drone’s flight trajectory and orientation in case of propeller failure, ensuring a quadrotor drone’s stability and safe landing.
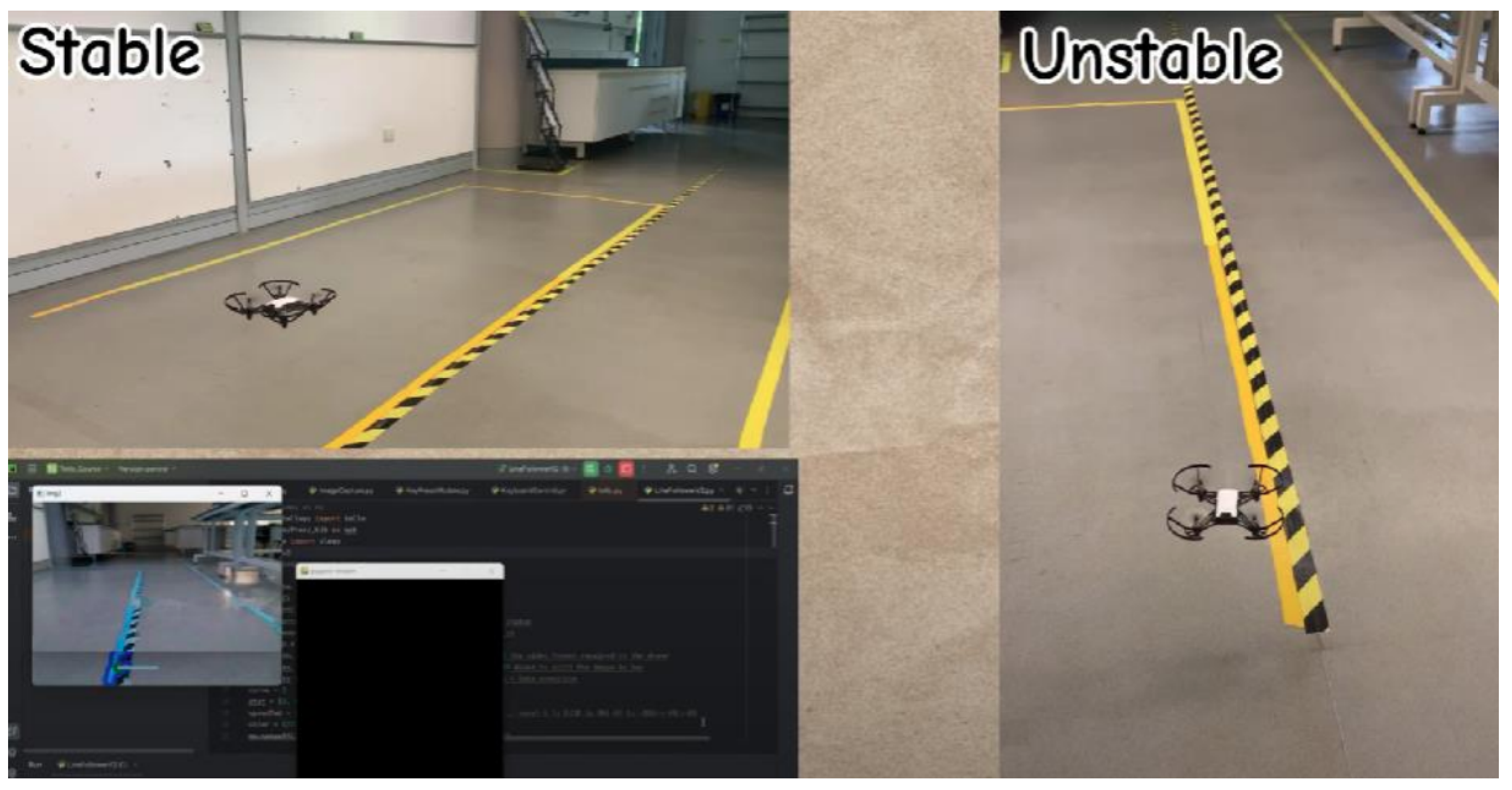
- The proposed FOPID is implemented on a real Tello EDU Quadrotor to test its ability to follow a designated line while experiencing propeller failures in guiding the drone along the intended path despite disturbances and instability caused by propeller loss, and it performed more effectively than the conventional PID.
3. Methodology
3.1. Quadrotor Drone’s Hardware and Software Configurations
3.2. Propeller Failure Scenarios
3.3. Controller Development
3.3.1. PID Controller
3.3.2. Fractional-Order PID Controller
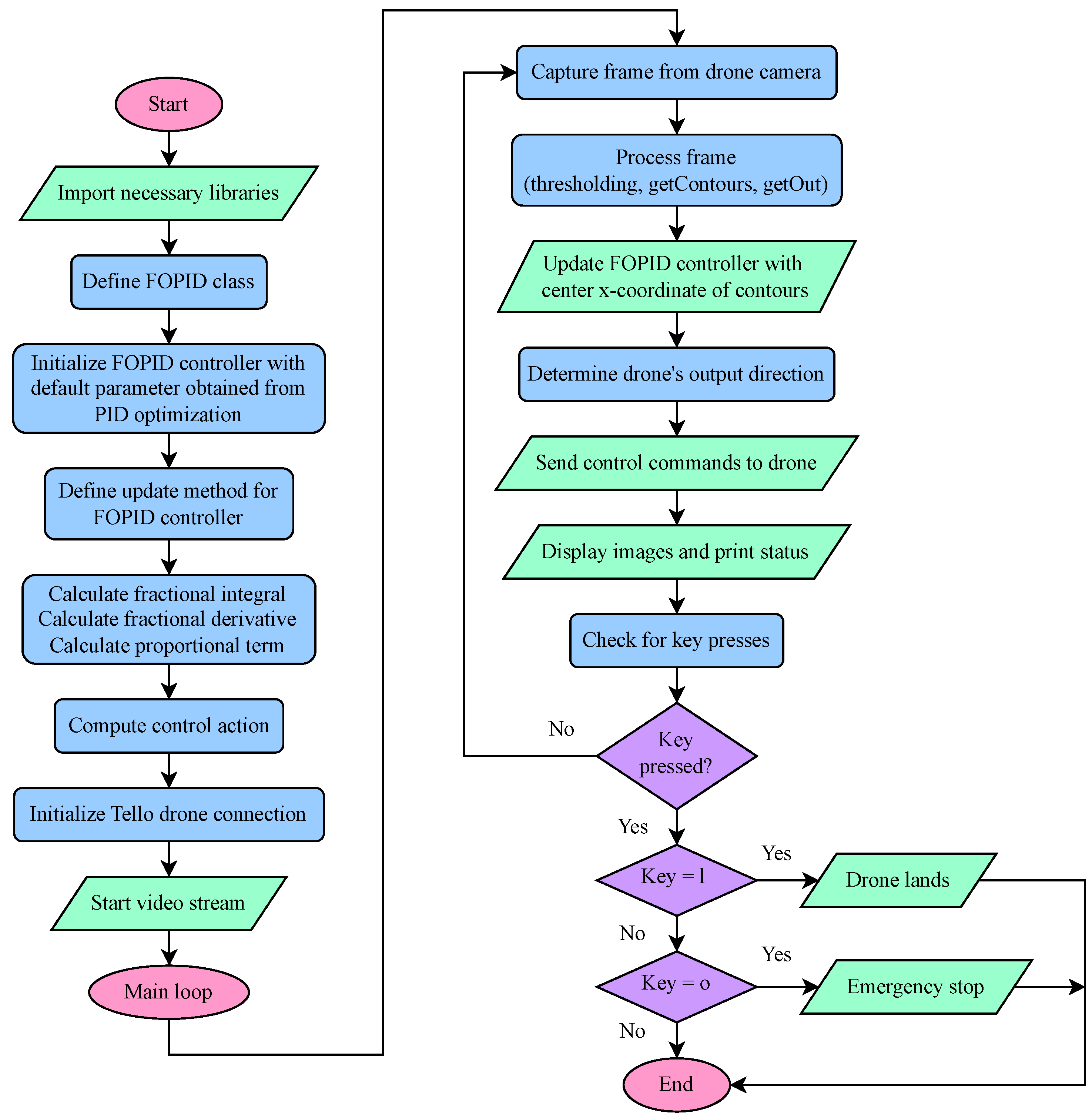
- Initialization: the FOPID controller is initialized with the PID parameters obtained from the auto-tune process and the chosen fractional orders.
- Fractional calculus: fractional integral and derivative terms were computed using trail-and-error method and special functions from the ’scipy’ library.
- Control law: the control law combines proportional, fractional integral, and fractional derivative terms to compute the control action.
- Implementation: the FOPID controller is utilized on the quadrotor using the ’djitellopy’ library for drone control. The controller adjusts the drone’s flight parameters in real-time to maintain stability.
3.4. Implementation on the Quadrotor
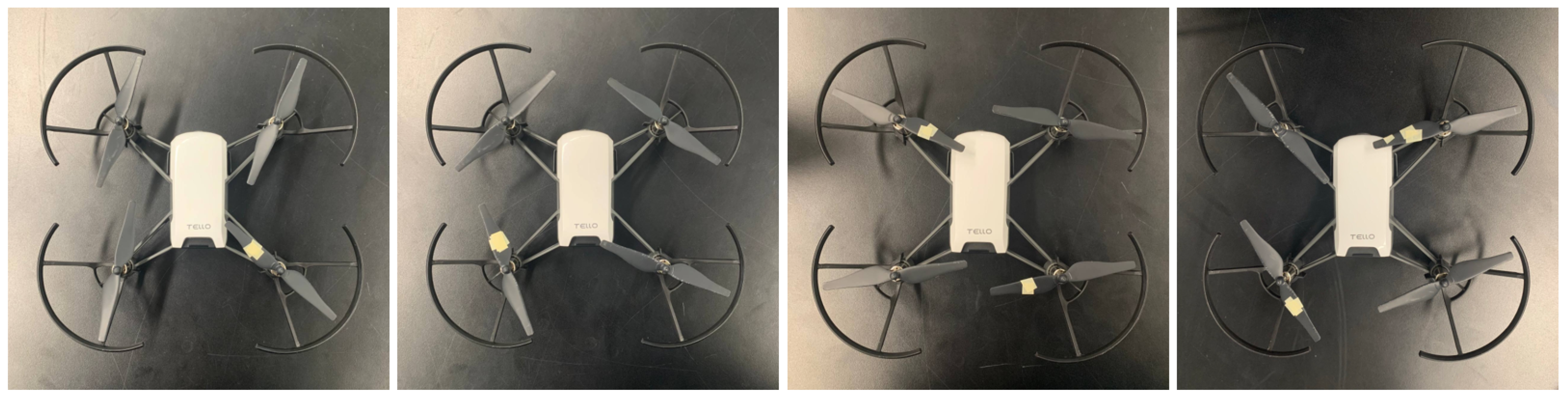
- Preliminary flight tests: Initial testing is conducted indoors to ensure the algorithms stabilize the drone in a controlled environment. Various propeller failure scenarios shown in Figure 6 were simulated to evaluate the controller’s ability to maintain stability and achieve safe landings.
- Line tracking tests: Subsequent testing is conducted under more challenging conditions. These tests were conducted using lightweight masking tape material (see Figure 2a) further evaluated the controllers’ robustness and responsiveness to visual environmental disturbances.
- Initialization:
- Flight control loop:
- Continuously capture the drone’s flight parameters (e.g., roll, pitch, yaw).
- Use the FOPID controller to compute the necessary control actions based on the current flight parameters.
- Adjust the drone’s real-time control inputs (e.g., roll, pitch, yaw) to maintain stability.
- Safety and monitoring:
- Implement safety checks to ensure the drone remains within operational limits.
- Monitor the drone’s battery level and other critical parameters like all four motor temperatures to prevent potential issues during flight.
4. Results and Discussions
4.1. Experimental Design and Cases
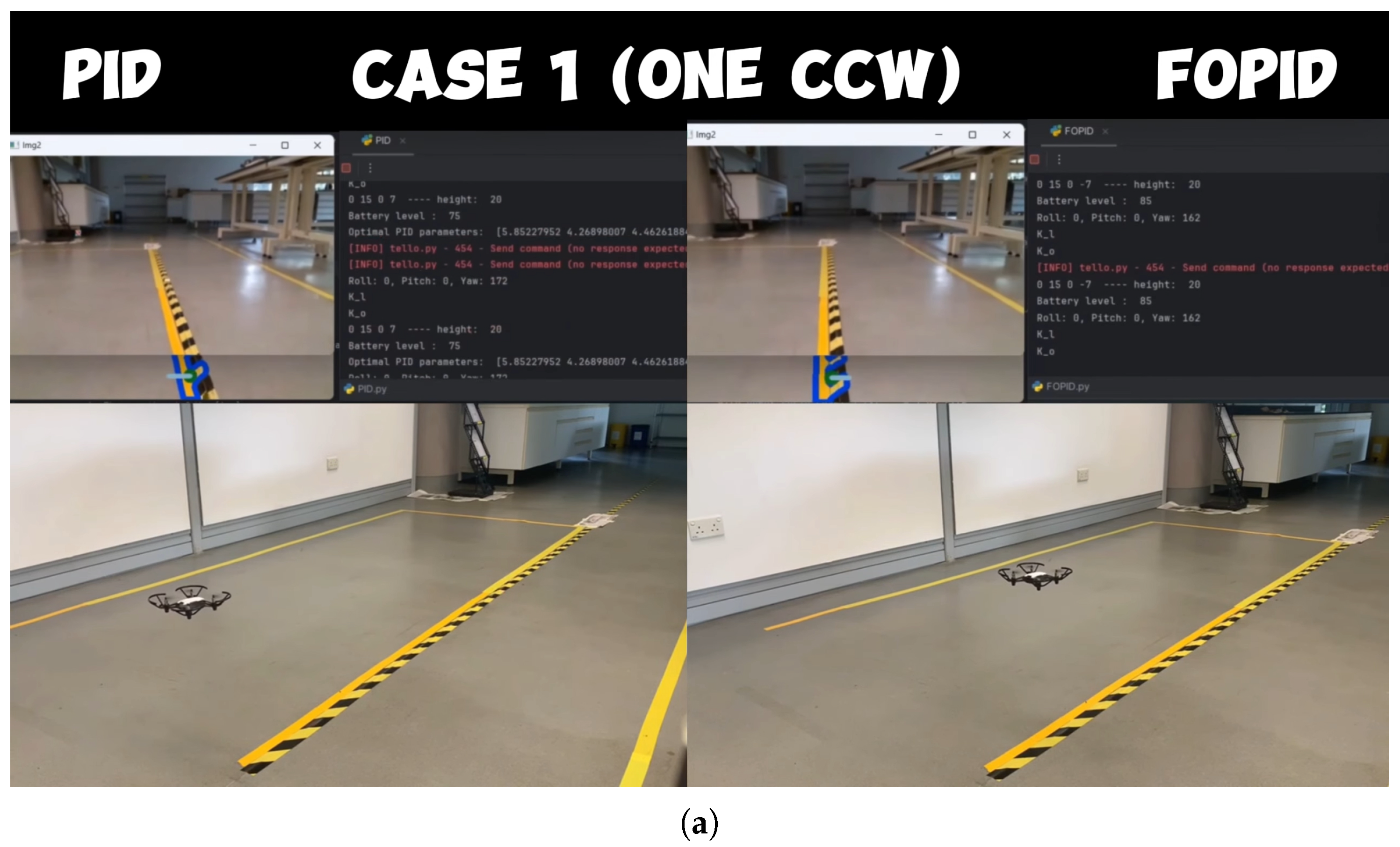
- Case 1: disturbance on one counter-clockwise propeller.
- Details: This case involves creating a disturbance on one of the drone’s counter-clockwise (CCW) propellers. The objective is to test the controller’s ability to stabilize the drone when only one of the CCW propellers is affected.
- Expected outcome: the controller should compensate for the disturbance and maintain a stable flight, achieving a safe landing.
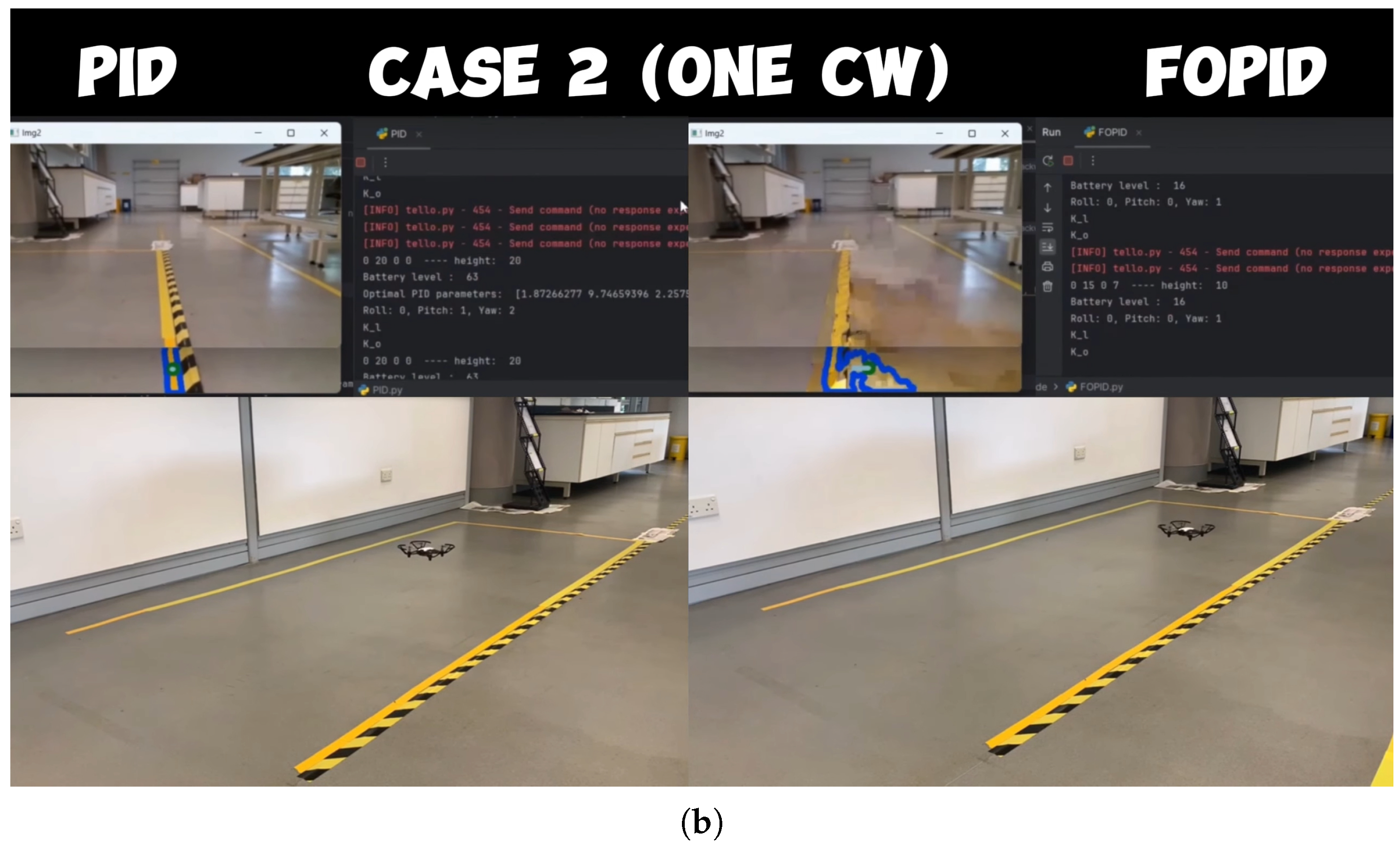
- Case 2: disturbance on one clockwise propeller.
- Details: This case involves creating a disturbance on one of the drone’s clockwise (CW) propellers. Likewise, in case 1, the objective is to assess the controller’s ability to handle a single-propeller disturbance on a CW propeller.
- Expected outcome: the controller should successfully counteract the disturbance, ensuring the drone remains stable and lands safely.
- Case 3: disturbance on both counter-clockwise propellers.
- Details: In this scenario, disturbances are introduced to both drones’ CCW propellers. This case tests the controller’s performance under more severe conditions, as both CCW propellers are affected simultaneously.
- Expected outcome: the controller needs to show its robustness by stabilizing the drone, even when faced with the disturbance caused by the dual propellers, so that the drone can safely land.
- Case 4: disturbance on both clockwise propellers.
- Details: This case involves disturbances on both drones’ CW propellers. As with case 3, this scenario presents a challenging condition where the controller must manage dual-propeller disturbances on the CW side.
- Expected outcome: the controller is expected to mitigate the disturbances and maintain flight stability, culminating in a safe landing.
4.2. Line Tracking Under Disturbed and Undisturbed Conditions
4.3. Controller Performance
- Case 1: https://youtu.be/O75SCfhuQqI (accessed on 15 August 2024).
- Case 2: https://youtu.be/_K_Hev007IA (accessed on 15 August 2024).
- Case 3: https://youtu.be/Sxe4myqIjKs (accessed on 15 August 2024).
- Case 4: https://youtu.be/NRb0vmyMmgw (accessed on 15 August 2024).
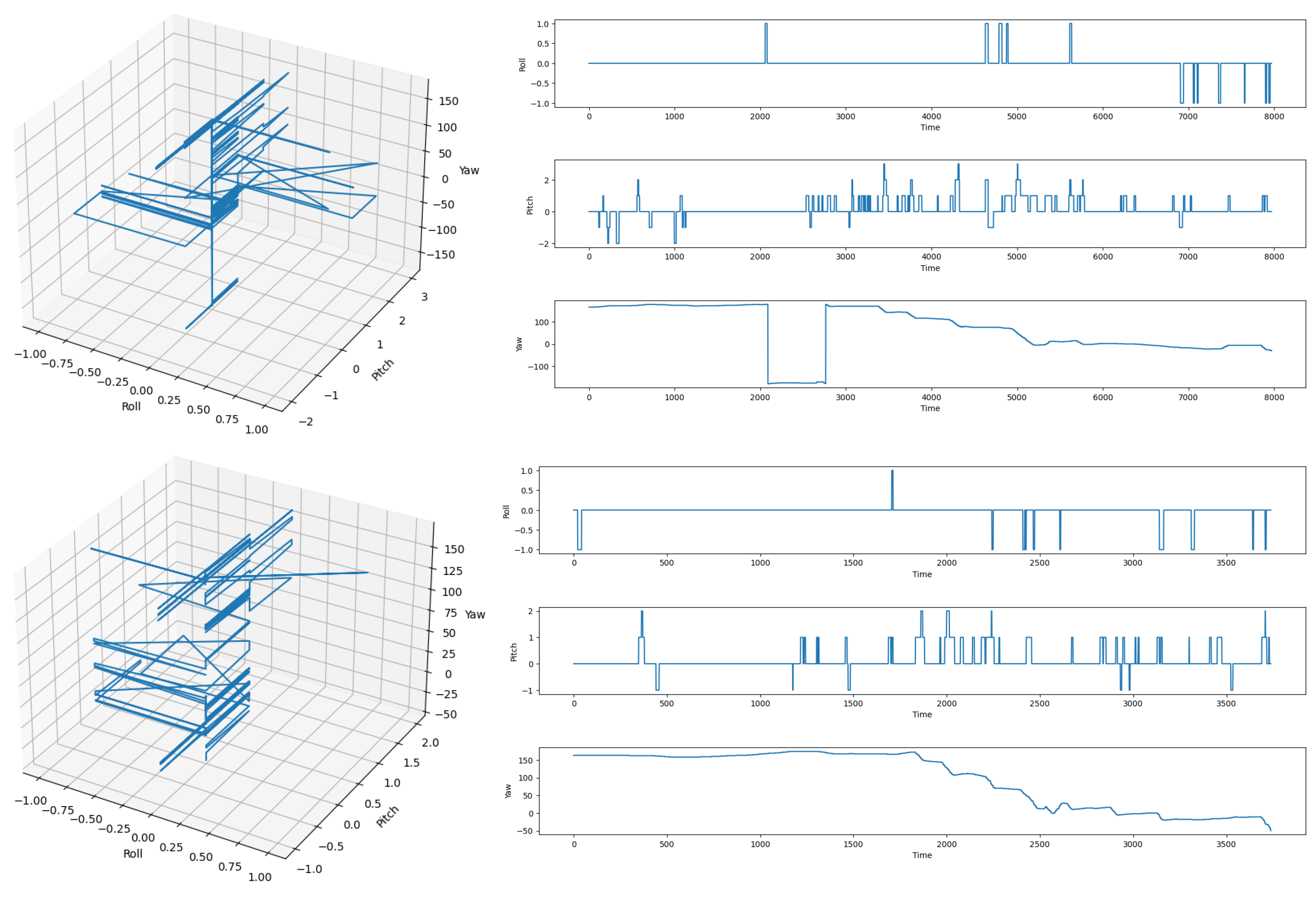
4.3.1. Case 1: Disturbance on One Counter-Clockwise Propeller
4.3.2. Case 2: Disturbance on One Clockwise Propeller
4.3.3. Case 3: Disturbance on Both Counter-Clockwise Propellers
4.3.4. Case 4: Disturbance on Both Clockwise Propellers
4.4. Comparative Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the unmanned aerial vehicles (UAVs): A comprehensive review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Laghari, A.A.; Jumani, A.K.; Laghari, R.A.; Nawaz, H. Unmanned aerial vehicles: A review. Cogn. Robot. 2023, 3, 8–22. [Google Scholar] [CrossRef]
- Del Cerro, J.; Cruz Ulloa, C.; Barrientos, A.; de León Rivas, J. Unmanned aerial vehicles in agriculture: A survey. Agronomy 2021, 11, 203. [Google Scholar] [CrossRef]
- Wandelt, S.; Wang, S.; Zheng, C.; Sun, X. Aerial: A meta review and discussion of challenges toward unmanned aerial vehicle operations in logistics, mobility, and monitoring. IEEE Trans. Intell. Transp. Syst. 2023. [Google Scholar] [CrossRef]
- Lopez-Sanchez, I.; Moreno-Valenzuela, J. PID control of quadrotor UAVs: A survey. Annu. Rev. Control 2023, 56, 100900. [Google Scholar] [CrossRef]
- Zhou, X.; Yu, X.; Guo, K.; Zhou, S.; Guo, L.; Zhang, Y.; Peng, X. Safety flight control design of a quadrotor UAV with capability analysis. IEEE Trans. Cybern. 2021, 53, 1738–1751. [Google Scholar] [CrossRef]
- Carlos, B.B.; Franchi, A.; Oriolo, G. Towards Safe Human-Quadrotor Interaction: Mixed-Initiative Control via Real-Time NMPC. IEEE Robot. Autom. Lett. 2021, 6, 7611–7618. [Google Scholar] [CrossRef]
- Wang, B.; Shen, Y.; Zhang, Y. Active fault-tolerant control for a quadrotor helicopter against actuator faults and model uncertainties. Aerosp. Sci. Technol. 2020, 99, 105745. [Google Scholar] [CrossRef]
- Guo, K.; Zhang, W.; Zhu, Y.; Jia, J.; Yu, X.; Zhang, Y. Safety control for quadrotor UAV against ground effect and blade damage. IEEE Trans. Ind. Electron. 2022, 69, 13373–13383. [Google Scholar] [CrossRef]
- Ullah, S.; Alghamdi, H.; Algethami, A.A.; Alghamdi, B.; Hafeez, G. Robust Control Design of Under-Actuated Nonlinear Systems: Quadcopter Unmanned Aerial Vehicles with Integral Backstepping Integral Terminal Fractional-Order Sliding Mode. Fractal Fract. 2024, 8, 412. [Google Scholar] [CrossRef]
- Liu, H.; Li, B.; Xiao, B.; Ran, D.; Zhang, C. Reinforcement learning-based tracking control for a quadrotor unmanned aerial vehicle under external disturbances. Int. J. Robust Nonlinear Control 2023, 33, 10360–10377. [Google Scholar] [CrossRef]
- Bektash, O.; Pedersen, J.N.; Gomez, A.R.; la Cour-Harbo, A. Automated emergency landing system for drones: SafeEYE project. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1056–1064. [Google Scholar]
- Jung, W.; Bang, H. Fault and failure tolerant model predictive control of quadrotor UAV. Int. J. Aeronaut. Space Sci. 2021, 22, 663–675. [Google Scholar] [CrossRef]
- Lee, S.J.; Jang, I.; Kim, H.J. Fail-safe flight of a fully-actuated quadrotor in a single motor failure. IEEE Robot. Autom. Lett. 2020, 5, 6403–6410. [Google Scholar] [CrossRef]
- Vong, C.H.; Ryan, K.; Chung, H. Trajectory tracking control of quadcopters under tunnel effects. Mechatronics 2021, 78, 102628. [Google Scholar] [CrossRef]
- Lin, J.; Wang, Y.; Miao, Z.; Zhong, H.; Fierro, R. Low-complexity control for vision-based landing of quadrotor UAV on unknown moving platform. IEEE Trans. Ind. Inform. 2021, 18, 5348–5358. [Google Scholar] [CrossRef]
- Kumar, A. Real-time performance comparison of vision-based autonomous landing of quadcopter on a ground moving target. IETE J. Res. 2023, 69, 5455–5472. [Google Scholar] [CrossRef]
- Sonugür, G. A Review of quadrotor UAV: Control and SLAM methodologies ranging from conventional to innovative approaches. Robot. Auton. Syst. 2023, 161, 104342. [Google Scholar] [CrossRef]
- Hedayatpour, M.; Mehrandezh, M.; Janabi-Sharifi, F. Precision modeling and optimally-safe design of quadcopters for controlled crash landing in case of rotor failure. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 5206–5211. [Google Scholar]
- Yoo, J.; Jang, D.; Kim, H.J.; Johansson, K.H. Hybrid reinforcement learning control for a micro quadrotor flight. IEEE Control Syst. Lett. 2020, 5, 505–510. [Google Scholar] [CrossRef]
- Zhou, L.; Pljonkin, A.; Singh, P.K. Modeling and PID control of quadrotor UAV based on machine learning. J. Intell. Syst. 2022, 31, 1112–1122. [Google Scholar] [CrossRef]
- Espinoza, J.; Hakim, N.; Tan, D.; Wilson, T.; Bingi, K.; Khan, E.; Masrura, S. Fractional-Order PID Control of Quadrotor Drone. In Proceedings of the 2023 Innovations in Power and Advanced Computing Technologies (i-PACT), Kuala Lumpur, Malaysia, 8–10 December 2023; pp. 1–6. [Google Scholar]
- Labbadi, M.; Boukal, Y.; Cherkaoui, M.; Djemai, M. Fractional-order global sliding mode controller for an uncertain quadrotor UAVs subjected to external disturbances. J. Frankl. Inst. 2021, 358, 4822–4847. [Google Scholar] [CrossRef]
- Pouzesh, M.; Mobayen, S. Event-triggered fractional-order sliding mode control technique for stabilization of disturbed quadrotor unmanned aerial vehicles. Aerosp. Sci. Technol. 2022, 121, 107337. [Google Scholar] [CrossRef]
- Timis, D.D.; Muresan, C.I.; Dulf, E.H. Design and experimental results of an adaptive fractional-order controller for a quadrotor. Fractal Fract. 2022, 6, 204. [Google Scholar] [CrossRef]
- Saif, A.W.A.; Gaufan, K.B.; El-Ferik, S.; Al-Dhaifallah, M. Fractional order sliding mode control of quadrotor based on fractional order model. IEEE Access 2023, 11, 79823–79837. [Google Scholar] [CrossRef]
- Setyawan, G.E.; Kurniawan, W.; Gaol, A.C.L. Linear quadratic regulator controller (LQR) for AR. Drone’s safe landing. In Proceedings of the 2019 International Conference on Sustainable Information Engineering and Technology (SIET), Lombok, Indonesia, 28–30 September 2019; pp. 228–233. [Google Scholar]
- Lee, S.; Kwon, Y. Safe landing of drone using AI-based obstacle avoidance. Int. J. Mech. Eng. Robot. Res. 2020, 9, 1495–1501. [Google Scholar] [CrossRef]
- Shi, G.; Shi, X.; O’Connell, M.; Yu, R.; Azizzadenesheli, K.; Anandkumar, A.; Yue, Y.; Chung, S.J. Neural lander: Stable drone landing control using learned dynamics. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 9784–9790. [Google Scholar]
- Altınuç, K.O.; Khan, M.U.; Iqbal, J. Avoiding contingent incidents by quadrotors due to one or two propellers failure. PLoS ONE 2023, 18, e0282055. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Z.; Liu, Y. A smart landing platform with data-driven analytic procedures for UAV preflight safety diagnosis. IEEE Access 2021, 9, 154876–154891. [Google Scholar] [CrossRef]
- Arasanipalai, R.; Agrawal, A.; Ghose, D. Mid-flight propeller failure detection and control of propeller-deficient quadcopter using reinforcement learning. arXiv 2020, arXiv:2002.11564. [Google Scholar]
- Liu, H.; Man, M.H.C.; Low, K.H. UAV airborne collision to manned aircraft engine: Damage of fan blades and resultant thrust loss. Aerosp. Sci. Technol. 2021, 113, 106645. [Google Scholar] [CrossRef]
- Merheb, A.R.; Noura, H.; Bateman, F. Emergency control of AR drone quadrotor UAV suffering a total loss of one rotor. IEEE/ASME Trans. Mechatron. 2017, 22, 961–971. [Google Scholar] [CrossRef]
- Toufaili, H.E. Quadcopter Collision Recovery under Loss of One Propeller; McGill University (Canada): Montréal, QC, Canada, 2019. [Google Scholar]
- Iskandar, M.; Bingi, K.; Prusty, B.R.; Omar, M.; Ibrahim, R. Artificial intelligence-based human gesture tracking control techniques of Tello EDU Quadrotor Drone. In Proceedings of the International Conference on Green Energy, Computing and Intelligent Technology (GEn-CITy 2023), Iskandar Puteri, Malaysia, 10–12 July 2023; Volume 2023, pp. 123–128. [Google Scholar]
- Iskandar, M.; Bingi, K.; Ibrahim, R.; Omar, M.; Devan, P.A.M. Hybrid Face and Eye Gesture Tracking Algorithm for Tello EDU RoboMaster TT Quadrotor Drone. In Proceedings of the 2023 Innovations in Power and Advanced Computing Technologies (i-PACT), Kuala Lumpur, Malaysia, 8–10 December 2023; pp. 1–6. [Google Scholar]
- Kasraoui, A.; Bingi, K.; Ibrahim, R.; Omar, M.; Devan, P.A.M.; Prusty, B.R. Tracking Control of Tello EDU Quadrotor Drone Using Image Thresholding. In Proceedings of the 2023 Innovations in Power and Advanced Computing Technologies (i-PACT), Kuala Lumpur, Malaysia, 8–10 December 2023; pp. 1–6. [Google Scholar]
- Bingi, K.; Ibrahim, R.; Karsiti, M.N.; Hassan, S.M.; Harindran, V.R. Fractional-Order Systems and PID Controllers; Springer: Berlin/Heidelberg, Germany, 2020; Volume 264. [Google Scholar]
- Bingi, K.; Rajanarayan Prusty, B.; Pal Singh, A. A review on fractional-order modelling and control of robotic manipulators. Fractal Fract. 2023, 7, 77. [Google Scholar] [CrossRef]
- Rodriguez, A.A.; Shekaramiz, M.; Masoum, M.A. Computer Vision-Based Path Planning with Indoor Low-Cost Autonomous Drones: An Educational Surrogate Project for Autonomous Wind Farm Navigation. Drones 2024, 8, 154. [Google Scholar] [CrossRef]
- Lionel, N.; Bingi, K.; Ibrahim, R.; Korah, R.; Kumar, G.; Prusty, B.R. Autonomous Inspection of Solar Panels and Wind Turbines Using YOLOv8 with Quadrotor Drones. In Proceedings of the 2024 9th International Conference on Mechatronics Engineering (ICOM), Kuala Lumpur, Malaysia, 13–14 August 2024; pp. 322–326. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Drone | Objective | Control Technique | Tool | Validation Method |
|---|---|---|---|---|---|
| [9] | Custom made drone | To counteract the ground effect after blade damage | Disturbance observer PID control, H∞ and Sliding mode observer | - | Experiment |
| [12] | DJI Matrice 600 | Emergency landing system | if/else and Neutral network | Python | Experiment |
| [19] | Quadrotor model | Safe landing using fixed tilting angle to the rotors | LQR control | - | Simulation |
| [27] | Parrot AR.Drone | Safe landing with minimal physical damage | Linear Quadratic Regulator (LQR) | MATLAB | Hardware-in-the-loop |
| [28] | Multirotor drone | Safe and obstacle avoidance landing using AI | Yolo v3 | OpenCV | Experiment |
| [29] | Intel Aero drone | Precise landing using neural control with ground effects | Feedback linearization controller | PyTorch | Simulation and Experiment |
| [30] | Custom made drone | To maintain drones position even upon losing one or two propellers | Fault-tolerant PID control and Model Predictive Control | MATLAB | Simulation and Experiment |
| [31] | Custom made drone | To perform safety checks and weight measurement on a landing platform | - | Python 3.7 | Simulation and Experiment |
| [32] | Quadrotor model | To identify propeller failures in mid-flight | Reinforcement Learning based PD Control | RaisimGym quadcopter environment | Simulation |
| [33] | DJI Phantom 3 model | UAV impact assessment on aircraft engines for safe operation | - | CFD Simulation | Simulation |
| [34] | AR Drone 2 | Emergency controller design for quadrotor to trirotor conversion to avoid total failure | PID | MATLAB | Experiment |
| [35] | Custom made drone | Develop a collision recovery control strategy upon impact with a wall | LQR control | MATLAB | Hardware-in-the-loop |
| Case | |||||
|---|---|---|---|---|---|
| Case 1 | 5.852 | 4.268 | 4.462 | 0.98 | 0.02 |
| Case 2 | 1.872 | 9.746 | 2.257 | 0.98 | 0.02 |
| Case 3 | 4.243 | 8.066 | 0.832 | 0.98 | 0.02 |
| Case 4 | 7.326 | 1.287 | 4.198 | 0.98 | 0.02 |
| Case | Controller | Graph Time Range | Actual Test Duration (Min) | Actual Test Duration (s) |
|---|---|---|---|---|
| Case 1 | PID | 0–8000 units | 2.03 | 121.8 |
| FOPID | 0–3500 units | 1.35 | 81 | |
| Case 2 | PID | 0–8000 units | 2.17 | 130.2 |
| FOPID | 0–4000 units | 2.11 | 126.6 | |
| Case 3 | PID | 0–5000 units | 1.58 | 94.8 |
| FOPID | 0–4000 units | 1.52 | 91.2 | |
| Case 4 | PID | 0–8000 units | 2.05 | 123 |
| FOPID | 0–3000 units | 1.22 | 73.2 |
| Case | Controller | Roll | Pitch | Yaw | Trajectory Stability |
|---|---|---|---|---|---|
| Case 1 | PID | High | High | High | Unstable |
| FOPID | Low | Low | Low | Smooth | |
| Case 2 | PID | High | High | High | Deviated |
| FOPID | Low | Low | Low | Steady | |
| Case 3 | PID | High | High | High | Oscillatory |
| FOPID | Low | Low | Low | Controlled | |
| Case 4 | PID | High | High | High | Chaotic |
| FOPID | Low | Low | Low | Controlled |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rosmadi, N.H.B.; Bingi, K.; Devan, P.A.M.; Korah, R.; Kumar, G.; Prusty, B.R.; Omar, M. Fractional-Order Control Algorithm for Tello EDU Quadrotor Drone Safe Landing during Disturbance on Propeller. Drones 2024, 8, 566. https://doi.org/10.3390/drones8100566
Rosmadi NHB, Bingi K, Devan PAM, Korah R, Kumar G, Prusty BR, Omar M. Fractional-Order Control Algorithm for Tello EDU Quadrotor Drone Safe Landing during Disturbance on Propeller. Drones. 2024; 8(10):566. https://doi.org/10.3390/drones8100566
Chicago/Turabian StyleRosmadi, Nurfarah Hanim Binti, Kishore Bingi, P. Arun Mozhi Devan, Reeba Korah, Gaurav Kumar, B Rajanarayan Prusty, and Madiah Omar. 2024. "Fractional-Order Control Algorithm for Tello EDU Quadrotor Drone Safe Landing during Disturbance on Propeller" Drones 8, no. 10: 566. https://doi.org/10.3390/drones8100566
APA StyleRosmadi, N. H. B., Bingi, K., Devan, P. A. M., Korah, R., Kumar, G., Prusty, B. R., & Omar, M. (2024). Fractional-Order Control Algorithm for Tello EDU Quadrotor Drone Safe Landing during Disturbance on Propeller. Drones, 8(10), 566. https://doi.org/10.3390/drones8100566