Abstract
The asymptotic behavior of discrete Riemann–Liouville fractional difference equations is a fundamental problem with important mathematical and physical implications. In this paper, we investigate a particular case of such an equation of the order subject to a given initial condition. We establish the existence of a unique solution expressed via a Mittag-Leffler-type function. The delta-asymptotic behavior of the solution is examined, and its convergence properties are rigorously analyzed. Numerical experiments are conducted to illustrate the qualitative features of the solution. Furthermore, a neural network-based approximation is employed to validate and compare with the analytical results, confirming the accuracy, stability, and sensitivity of the proposed method.
Keywords:
Mittag-Leffler function; delta behavior solution; fractional difference operator; neural network approximations MSC:
26A48; 26A51; 33B10; 39A12; 39B62; 68T07
1. Introduction
In recent years, the synergy between fractional calculus and machine learning has opened new research avenues for modeling and predicting complex dynamics in systems with memory and nonlocal behavior. Specifically, machine learning algorithms have been increasingly integrated with fractional-order models to improve prediction accuracy, system identification, and control under uncertainty [1,2]. In the real world, the performance of discrete fractional calculus is often not stable but is affected by a variety of factors [3,4,5,6]. Due to their extensive applications, fractional operators of discrete types such as Riemann–Liouville [7,8] and Liouville–Caputo [9,10] have attracted considerable interest from the research community. Numerous studies have explored both numerical methods and theoretical analysis for discrete fractional problems (DFPs) and various fractional difference systems; see [11,12,13,14,15]. These systems of fractional differential and difference equations can be modeled using Cauchy-type problems; see, for example, [16,17,18,19].
In fractional calculus theory, Mittag-Leffler (ML) functions are fundamental to introduce fractional operators and to study dynamical systems; see [20,21,22,23]. ML functions extend the traditional framework of discrete fractional calculus by introducing special function parameters that control the decay rate of the memory kernels. These special functions allow for more flexible modeling of discrete fractional operators with long-range memory effects, capturing wider ranges of behaviors beyond those described by classical fractional operators (Riemann–Liouville and Liouville–Caputo), such as Attangana–Baleanu and other generalized types of discrete fractional operators [24,25,26,27].
Recently, many studies have been actively conducted to analyze the existence and uniqueness for the DFP solutions. To the best of our knowledge, most of the existence and uniqueness of DFPs has been focusing on ML functions; see [28,29,30,31,32]. Furthermore, for DFPs of nabla types with some boundary and initial conditions [33,34,35,36], comparison theorems, sufficient and necessary conditions of the stability analyses, and behavior of solutions have been derived [37,38,39,40].
As there are few papers on studying asymptotic behavior of solutions for the DFP of delta type, our main effort in this paper is to design the behavior of solutions for the following DFP of delta type:
subject to a positive initial condition, as follows:
for .
The motivation behind this study lies in exploring the dynamic behavior of discrete fractional systems with Riemann–Liouville-type operators, particularly of the order , due to their rich mathematical structure and relevance in modeling memory effects. The novelty of this includes the derivation of a discrete Mittag-Leffler-type function and analysis of asymptotic behavior and convergence of the solution of DFP (1). Furthermore, we incorporate neural network approximations to benchmark the analytical results, highlighting the effectiveness and accuracy of the proposed approach.
The rest of our study can be summarized as follows: Section 2 details with the main definitions of discrete operators and Laplace transformations in the delta and nabla cases. In Section 3, the new special function (ML function) will be introduced, the asymptotic behavior and convergence of solutions are investigated for the half-order fractional model, and finally, the formula of solution is constructed. Section 4 presents two illustrative examples that demonstrate the convergence, stability, and instability behavior of the solution. Additionally, the results are compared with neural network approximations to validate the accuracy of the proposed analytical method. Finally, the conclusion will be outlined in the last section.
2. Preliminaries
Let with and . Then, the delta sum is defined by [7]
and the delta RL-difference, for , is defined in [9] by
where
for and y is defined on .
We recall the definition of -Laplace and ∇-Laplace transformations, which are defined in Theorem 2.2 and Theorem 3.65 in [7], respectively.
Lemma 1.
If , then the Δ-Laplace is given by
s.t. .
Furthermore, if , then the ∇-Laplace is given by
s.t. the series converges for each values of z.
The convergence of the ∇-Laplace transformation can be stated in the following lemma.
Lemma 2
(see [7]). If the ∇-Laplace of is convergent to , for some , then we have
s.t. .
Next, the lemma finds the discrete Laplace of the solution of DFP (1).
Lemma 3.
3. Asymptotic Behavior of -Order
A special function used in our study is the following ML function:
for , where
according to [4,7]. In addition, it is clear that converges for .
Lemma 4.
Proof.
The proof is omitted as it is similar to Lemma 3.1 in [40]. □
Next, for , we expand our result for the asymptotic solution of DFP (1)–(2). This allows us to obtain some necessary properties of . For example, for large t, we will obtain the following:
- A sign condition and monotonicity result for whenever ;
- The asymptotic estimate of whenever .
Proof.
If we set and , then we see that
where
where
Therefore, becomes
One can observe that, for , we can deduce
where . As a result, by using (13) and , we see that
Considering (7), we have
From Lemma 3 and (12), we get that
It follows from (15) and (16) that
By using (14) and (17), we obtain
This ends our proof. □
Proof.
Note that if , then we have . Therefore, by considering (18), the desired results can be obtained. □
Corollary 3.
For . Then every solution of DFP
is unstable and oscillatory.
Next, by considering (14), we can obtain an asymptotic behavior of the ML function .
For , we denote
where
according to Definition 2.24 in [7].
Corollary 5.
If is the unique solution of DFP (10) and (11), then we can deduce the following theorem and corollary.
Theorem 2.
Assume that . Then satisfies
where .
Proof.
From (18), when , we obtain the desired result. □
Corollary 6.
Suppose that . Then can satisfy
and
Proof.
The desired results can be obtained according to (20). □
Remark 1.
The next theorem shows that tends to 0 depending on the following lemma and (14).
Lemma 5
(see [41], Stolz-Cesáro theorem, pp. 85–88). If there are two sequences of real numbers
such that is unbounded, strictly increasing and positive with
then
Theorem 3.
Proof.
Define , and as follows:
and
Then, for , we see that is positive, unbounded, and strictly increasing.
where we have used the Stirling formula (see [42])
and
By considering Lemma 5, we know that
Thus, one can have
In view of (18), we see that
Therefore, from (21) and (22), we have
Next, by further characterizing the asymptotic behavior of , we observe that
where the following is used:
as . Therefore, for large ℓ, we see that
By considering (22), we know, for large t, that
Because
where we have used ,
and
By the same way used for , for large ℓ, we can deduce that
Considering (22), we have that
or equivalently, is increasing for large ℓ and t. □
4. Applications
This section aims to illustrate the practical behavior of the solution to the discrete fractional problem discussed in the preceding results. Specifically, using Lemma 4, we derive a summation formula for computing the solution at discrete time points. The formula reveals that depends only on the initial value and is independent of the starting point a. We then explore the qualitative behavior of the solution based on the parameter k, highlighting cases where the solution tends to zero, becomes unbounded, or exhibits oscillatory stability or instability. Numerical examples, figures, and a comparison with neural network approximations are provided to validate and support the theoretical findings. For this, we let , for . Then, we can deduce from Lemma 4, a summation formula for (1) as follows:
Before starting to the examples, we should note, from (23), that depends on the initial value and is independent of the starting point a. Consequently, by considering [40], Corollary 3, Corollary 5, Theorem 2, and Theorem 3, the following results can be summarized: A solution of DFP (19)
- Tends to 0 if ;
- Tends to ∞ if ;
- Is oscillatorily unstable if . That is,and
- is oscillatory stable if . That is,and
- Tends to 0 if .
4.1. Neural Network Approximation
To support the analytical results, a feedforward neural network (NN) was used to approximate the solution of the discrete fractional problem. The NN was trained on data from the analytical solution, with normalized time inputs and corresponding values as targets. The network had one hidden layer with 20 neurons and sigmoid activation, and was trained using the Levenberg–Marquardt algorithm. The dataset was split into 70% training, 15% validation, and 15% testing. The trained NN closely matched the analytical solution across the domain, with small absolute errors and stable performance under varying conditions, confirming its effectiveness as a surrogate model for fractional discrete systems. Similar approaches to solving fractional differential equations using neural network approximations can be found in [43,44,45].
Example 1.

We consider the DFP
- is oscillatorily stable for and ;
- is oscillatorily unstable for and ;
- will tend to 0 for and .
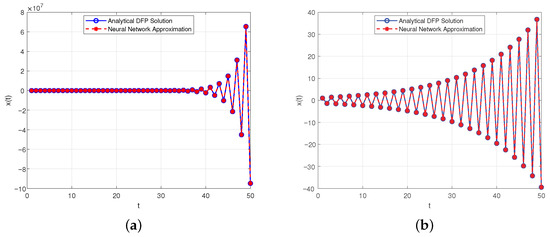
Figure 1.
Plot of (23) for and different k. (a) . (b) .
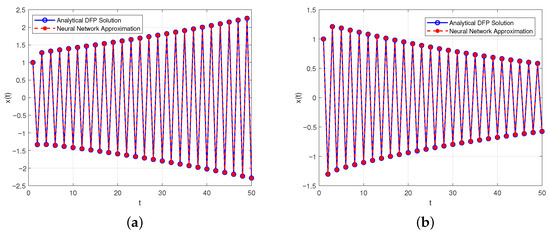
Figure 2.
Plot of (23) for and different k. (a) . (b) .
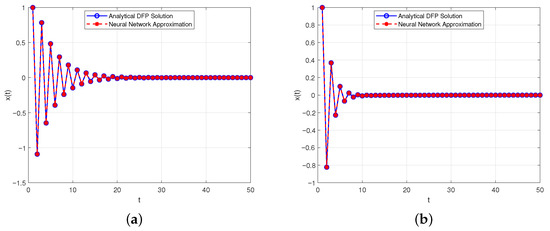
Figure 3.
Plot of (23) for and different k. (a) . (b) .
Example 1 investigates the behavior of the solution for various values of the parameter k, using the discrete fractional problem with the initial condition . The solution profiles shown in Figure 1, Figure 2 and Figure 3 illustrate distinct dynamic behaviors depending on the value of k. In Figure 1, for and , the solution exhibits oscillatorily stable behavior, with amplitudes that remain bounded and exhibit regular periodicity. Figure 2 shows a transition to oscillatory instability for and , where the amplitude of oscillations increases over time, indicating instability. In contrast, Figure 3 demonstrates that, for the larger values and , the solution decays and tends to zero, reflecting damping and asymptotic stability.
To further validate the numerical results, Table 1 compares the present method’s computed values of with those obtained using a neural network approximation for selected time points. The absolute error between the two methods remains consistently low (on the order of ), confirming the accuracy and reliability of the proposed approach. This agreement not only supports the theoretical analysis but also demonstrates the efficiency of the method in approximating discrete fractional models with high precision.
Table 1.
Comparison of the present method and neural network approximation for different k, with parameters , , and times .
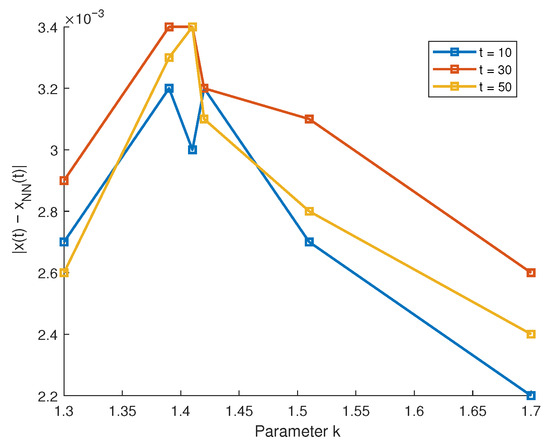
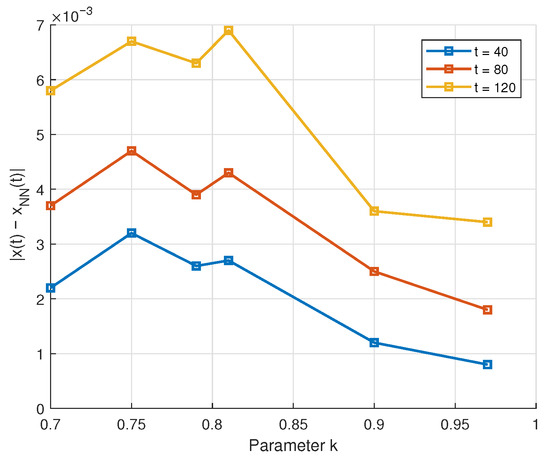
Figure 4 displays the absolute error for various values of k at for Example 1. The results show that the error remains small (approximately ) across all cases, indicating strong agreement between the proposed method and the neural network approximation. The error is stable with respect to k, confirming the accuracy and reliability of both approaches.
Figure 4.
Plot of absolute error in a different value of k and time values for Example 1.
The sensitivity analysis results presented in Table 2 illustrate the impact of varying the parameters k and α on the accuracy of the neural network approximation at , with the fixed values for Example 1. As observed, for each fixed value of k, the absolute error increases with increasing α. This trend suggests that the fractional order α influences the complexity of the dynamic behavior, leading to a higher approximation error by the neural network. Conversely, for a fixed α, increasing the parameter k tends to reduce the approximation error, indicating that stronger damping (larger k) contributes to smoother system behavior, which is easier to learn by the network. These observations confirm that both parameters play a significant role in the model’s approximation performance and must be carefully considered in neural network-based solutions.
Table 2.
Sensitivity analysis: absolute error between analytical DFP solution and neural network prediction at for various k and values (with fixed ).
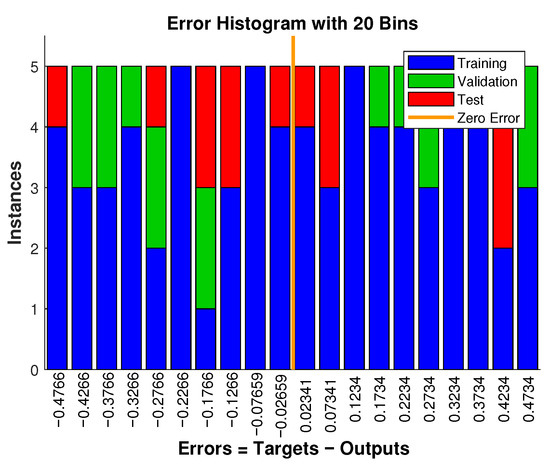
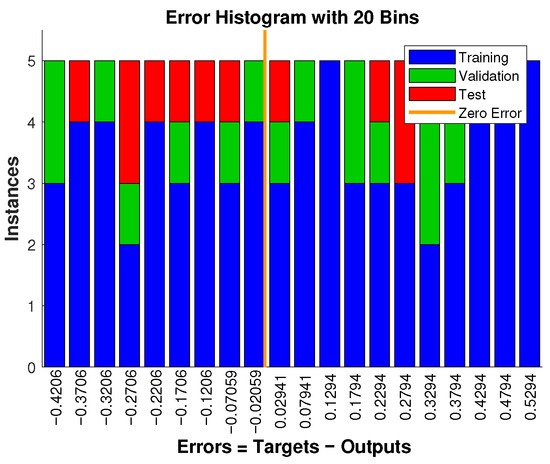
The histogram in Figure 5 illustrates the distribution of absolute errors in estimating the parameter k using the neural network model for Example 1. With 20 bins, the error values are tightly clustered around zero, demonstrating that the network effectively captures the relationship between the sampled solution values and the corresponding k. This confirms the network’s reliability in reverse-engineering the parameter from observed data.
Figure 5.
Histogram of absolute error between analytical and neural network solutions with 20 bins for Example 1.
Table 3 shows the effect of a varying parameter k on the neural network’s prediction accuracy for k under noisy initial conditions. The error tends to increase with larger values of k, indicating a slightly more challenging inverse problem for higher k, but the overall error remains relatively low, confirming the NN’s robustness.
Table 3.
Neural network prediction accuracy for various c values with noise level in initial condition for Example 1 (, ).
Example 2.
- is oscillatorily stable for and ;
- is oscillatorily unstable for and ;
- will tend to 0 for and .
Figure 6.
Comparison of analytical solution and neural network approximation for (23) with , and different k. (a) . (b) .
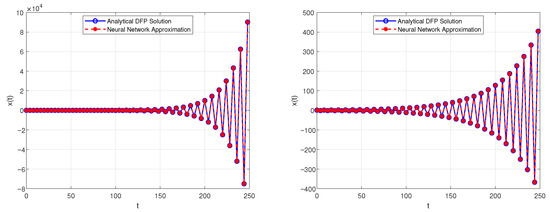
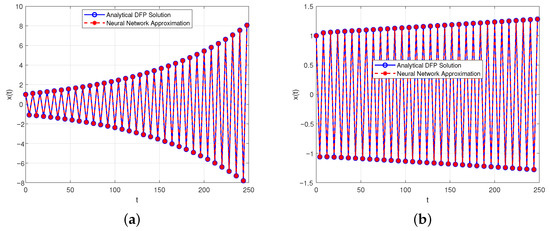
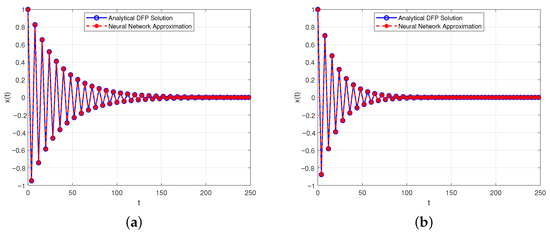
Figure 7.
Comparison of analytical solution and neural network approximation for (23) with , and different k. (a) . (b) .
Figure 8.
Comparison of analytical solution and neural network approximation for (23) with , and different k. (a) . (b) .
The numerical results demonstrate distinct dynamic behaviors of the solution for varying values of the parameter k. When and , the solution exhibits oscillatory stability, characterized by bounded fluctuations with an overall increasing tendency. As k increases to and , the solution becomes oscillatorily unstable, with a growing amplitude indicating divergence. For larger values such as and , the solution tends to zero, reflecting a decaying pattern.
These observations are well supported by the graphical comparisons in Figure 6, Figure 7 and Figure 8, where the present method and the neural network approximation show close agreement. This is further confirmed by the results in Table 4, where the absolute errors remain small, indicating the effectiveness and reliability of the neural network approach in approximating the discrete fractional problem.
Table 4.
Comparison of the present method and neural network approximation for different k, with parameters , , and .
Figure 9 presents the absolute error for different values of k at time levels for Example 2. The error remains within a small range, showing slightly increasing trends with time. Despite the longer time intervals and dynamic variations in the solution behavior, the neural network approximation closely matches the proposed method, confirming its effectiveness and accuracy.
Figure 9.
Plot of absolute error in different values of k and time values for Example 2.
The results presented in Table 5 show the absolute error between the analytical DFP solution and the neural network prediction at for various values of the parameters k and α, with fixed and for Example 2. It is evident that, for each fixed value of k, the absolute error increases as the fractional order α increases from 0.25 to 0.75. This indicates that higher fractional orders introduce greater complexity in the system dynamics, which challenges the neural network approximation. Additionally, for each fixed α, the absolute error tends to decrease as k increases from to , suggesting that larger values of k lead to smoother or more stable system behavior that the neural network can approximate more accurately. These observations emphasize the significant influence of both k and α on the approximation accuracy and highlight the importance of carefully selecting these parameters when modeling and approximating fractional dynamic systems.
Table 5.
Sensitivity analysis: absolute error between analytical DFP solution and neural network prediction at for various k and values with fixed and .
The histogram in Figure 10 illustrates the distribution of absolute errors in estimating the parameter k using the neural network model for Example 2. With 20 bins, the error values are tightly clustered around zero, demonstrating that the network effectively captures the relationship between the sampled solution values and the corresponding k. This confirms the network’s reliability in reverse-engineering the parameter from observed data.
Figure 10.
Histogram of absolute error between analytical and neural network solutions with 20 bins for Example 2.
Table 6 reports the mean absolute error of neural network predictions of the parameter k for Example 2 under the noisy initial condition . The results indicate a gradual increase in prediction error as c increases, reflecting the growing difficulty of parameter recovery in this fractional difference system. Despite the noise, the neural network remains effective across the tested parameter range.
Table 6.
Neural network prediction accuracy for various k values with noise level in initial condition for Example 2 (, ).
4.2. Algorithm for Solving the DFP and Neural Network Approximation
The following steps describe the procedure for solving the DFP and approximating the solution using a neural network, as follows:
Inputs: Initial value , parameters , and maximum time .
Step 1: Compute the number of steps, as follows:
Step 2: Define time levels, as follows:
Step 3: Initialize the solution array with .
Step 4: For each to , compute the following:
Step 5: Normalize time values, as follows:
Step 6: Prepare training data for the neural network, as follows:
Step 7: Define a feedforward neural network with one hidden layer of size 20.
Step 8: Set the data division, as follows:
- Training ratio: 70%;
- Validation ratio: 15%;
- Testing ratio: 15%.
Step 9: Train the neural network using .
Step 10: Predict the values using the trained network.
Step 11: Compute the absolute error at each time level, as follows:
Outputs: The approximated values , predicted values , and absolute error at each time point.
5. Conclusions and Future Direction
This paper has studied the discrete fractional problem of the order given by
for . We established the existence and uniqueness of the solution, which was expressed in terms of a Mittag-Leffler-type function suitable for discrete fractional calculus. The asymptotic behavior of the solution was rigorously analyzed, showing convergence properties under various parameter regimes. Additionally, numerical experiments, including comparisons with neural network approximations, were performed to validate the theoretical findings. The close agreement between analytical and neural results confirms the reliability, accuracy, and efficiency of the proposed method. Several examples were presented to illustrate the behavior of the solution under different conditions, including oscillatory stability, instability, and convergence to zero.
The analysis presented in this study can be generalized in several ways. For instance, the consideration of discrete generalized operators with exponential or Mittag-Leffler kernels (see [46,47]) could lead to a deeper understanding of the asymptotic behavior of solutions.
Author Contributions
Conceptualization, P.O.M., A.A.L. and M.R.A.; funding acquisition, A.A.L.; investigation, M.A.Y. and S.M.A.; project administration, S.M.A.; software, M.R.A. and M.A.Y.; Writing—original draft, P.O.M. and M.A.Y.; Writing—review and editing, A.A.L., M.R.A. and S.M.A. All authors have read and agreed to the published version of the manuscript.
Funding
The publication of this paper was supported by the University of Oradea.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Acknowledgments
The authors would like to acknowledge the Deanship of Graduate Studies and Scientific Research, Taif University, for funding this work.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Raubitzek, S.; Mallinger, K.; Neubauer, T. Combining Fractional Derivatives and Machine Learning: A Review. Entropy 2023, 25, 35. [Google Scholar] [CrossRef] [PubMed]
- Walasek, R.; Gajda, J. Fractional differentiation and its use in machine learning. Int. J. Adv. Eng. Sci. Appl. Math. 2021, 13, 270–277. [Google Scholar] [CrossRef]
- Chen, C. Discrete Caputo Delta Fractional Economic Cobweb Models. Qual. Theory Dyn. Syst. 2023, 22, 8. [Google Scholar] [CrossRef]
- Abdeljawad, T. Different type kernel h-fractional differences and their fractional h-sums. Chaos Solit. Fract. 2018, 116, 146–156. [Google Scholar] [CrossRef]
- Baleanu, D.; Wu, G.C. Some further results of the Laplace transform for variable-order fractional difference equations. Fract. Calc. Appl. Anal. 2019, 22, 1641–1654. [Google Scholar] [CrossRef]
- Dhawan, S.; Jonnalagadda, J.M. Nontrivial solutions for arbitrary order discrete relaxation equations with periodic boundary conditions. J. Anal. 2024, 32, 2113–2133. [Google Scholar] [CrossRef]
- Goodrich, C.S.; Peterson, A.C. Discrete Fractional Calculus; Springer: New York, NY, USA, 2015. [Google Scholar]
- Danca, M.-F.; Jonnalagadda, J.M. On the Solutions of a Class of Discrete PWC Systems Modeled with Caputo-Type Delta Fractional Difference Equations. Fractal Fract. 2023, 7, 304. [Google Scholar] [CrossRef]
- Guirao, J.L.G.; Mohammed, P.O.; Srivastava, H.M.; Baleanu, D.; Abualrub, M.S. A relationships between the discrete Riemann-Liouville and Liouville-Caputo fractional differences and their associated convexity results. AIMS Math. 2022, 7, 18127–18141. [Google Scholar] [CrossRef]
- Ikram, A. Lyapunov inequalities for nabla Caputo boundary value problems. J. Differ. Equ. Appl. 2018, 25, 757–775. [Google Scholar] [CrossRef]
- Atici, F.; Sengul, S. Modeling with discrete fractional equations. J. Math. Anal. Appl. 2010, 369, 1–9. [Google Scholar] [CrossRef]
- Silem, A.; Wu, H.; Zhang, D.-J. Discrete rogue waves and blow-up from solitons of a nonisospectral semi-discrete nonlinear Schrödinger equation. Appl. Math. Lett. 2021, 116, 107049. [Google Scholar] [CrossRef]
- Cabada, A.; Dimitrov, N. Nontrivial solutions of non-autonomous Dirichlet fractional discrete problems. Fract. Calc. Appl. Anal. 2020, 23, 980–995. [Google Scholar] [CrossRef]
- Mohammed, P.O.; Agarwal, R.P.; Yousif, M.A.; Al-Sarairah, E.; Lupas, A.A.; Abdelwahed, M. Theoretical Results on Positive Solutions in Delta Riemann-Liouville Setting. Mathematics 2024, 12, 2864. [Google Scholar] [CrossRef]
- Wang, P.; Liu, X.; Anderson, D.R. Fractional averaging theory for discrete fractional-order system with impulses. Chaos 2024, 34, 013128. [Google Scholar] [CrossRef] [PubMed]
- Eidelman, S.D.; Kochubei, A.N. Cauchy problem for fractional diffusion equations. J. Differ. Equ. 2004, 199, 211–255. [Google Scholar] [CrossRef]
- Karimova, E.; Ruzhansky, M.; Tokmagambetov, N. Cauchy type problems for fractional differential equations. Integral Transforms Spec. Funct. 2022, 33, 47–64. [Google Scholar] [CrossRef]
- Boutiara, A.; Rhaima, M.; Mchiri, L.; Makhlouf, A.B. Cauchy problem for fractional (p,q)-difference equations. AIMS Math. 2023, 8, 15773–15788. [Google Scholar] [CrossRef]
- Cinque, F.; Orsingher, E. Analysis of fractional Cauchy problems with some probabilistic applications. J. Math. Anal. Appl. 2024, 536, 128188. [Google Scholar] [CrossRef]
- Abdeljawad, T. Fractional difference operators with discrete generalized Mittag-Leffler kernels. Chaos Solit. Fract. 2019, 126, 315–324. [Google Scholar] [CrossRef]
- Mohammed, P.O.; Goodrich, C.S.; Hamasalh, F.K.; Kashuri, A.; Hamed, Y.S. On positivity and monotonicity analysis for discrete fractional operators with discrete Mittag-Leffler kernel. Math. Meth. Appl. Sci. 2022, 45, 6391–6410. [Google Scholar] [CrossRef]
- Nagai, A. Discrete Mittag–Leffler function and its applications. Publ. Res. Inst. Math. Sci. Kyoto Univ. 2003, 1302, 1–20. [Google Scholar]
- Awadalla, M.; Mahmudov, N.I.; Alahmadi, J. A novel delayed discrete fractional Mittag-Leffler function: Representation and stability of delayed fractional difference system. J. Appl. Math. Comput. 2024, 70, 1571–1599. [Google Scholar] [CrossRef]
- Saenko, V.V. The calculation of the Mittag–Leffler function. Int. J. Comput. Math. 2022, 99, 1367–1394. [Google Scholar] [CrossRef]
- Wu, G.C.; Baleanu, D.; Zeng, S.D.; Luo, W.H. Mittag–Leffler function for discrete fractional modelling. J. King Saud Univ. Sci. 2016, 28, 99–102. [Google Scholar] [CrossRef]
- Mohammed, P.O.; Abdeljawad, T.; Hamasalh, F.K. Discrete Prabhakar fractional difference and sum operators. Chaos Solit. Fractals 2021, 150, 111182. [Google Scholar] [CrossRef]
- Abdeljawad, T.; Baleanu, D. Discrete fractional differences with nonsingular discrete Mittag-Leffler kernels. Adv. Differ. Equ. 2016, 232, 2016. [Google Scholar]
- Wei, Y.; Zhao, L.; Lu, J.; Cao, J. Stability and Stabilization for Delay Delta Fractional Order Systems: An LMI Approach. IEEE Trans. Circuits Syst. II: Express Br. 2023, 70, 4093–4097. [Google Scholar] [CrossRef]
- Jonnalagadda, J.M. A Comparison Result for the Nabla Fractional Difference Operator. Foundations 2023, 3, 181–198. [Google Scholar] [CrossRef]
- Mohammed, P.O.; Lizama, C.; Lupas, A.A.; Al-Sarairah, E.; Abdelwahed, M. Maximum and Minimum Results for the Green’s Functions in Delta Fractional Difference Settings. Symmetry 2024, 16, 991. [Google Scholar] [CrossRef]
- Gholami, Y. A uniqueness criterion for nontrivial solutions of the nonlinear higher-order ∇-difference systems of fractional-order. Fract. Differ. Calc. 2021, 11, 85–110. [Google Scholar] [CrossRef]
- Goodrich, C.S. A comparison result for the fractional difference operator. Int. J. Differ. Equ. 2011, 6, 17–37. [Google Scholar]
- Jia, B.; Du, F.; Erbe, L.; Peterson, A. Asymptotic behavior of nabla half order h-difference equations. JAAC 2018, 8, 1707–1726. [Google Scholar]
- Du, F.; Lu, J.-G. Explicit solutions and asymptotic behaviors of Caputo discrete fractional-order equations with variable coefficients. Chaos Solit. Fractals 2021, 153, 111490. [Google Scholar] [CrossRef]
- Jia, B.; Lynn, E.; Peterson, A. Comparison theorems and asymptotic behavior of solutions of discrete fractional equations. Electron. J. Qual. Theory Differ. Equ. 2015, 89, 1–18. [Google Scholar] [CrossRef]
- Jonnalagadda, J.M. Asymptotic behaviour of linear fractional nabla difference equations. Int. J. Differ. Equ. 2017, 12, 255–265. [Google Scholar]
- Wang, M.; Jia, B.; Du, F.; Liu, X. Asymptotic stability of fractional difference equations with bounded time delays. Fract. Calc. Appl. Anal. 2020, 23, 571–590. [Google Scholar] [CrossRef]
- Brackins, A. Boundary Value Problems of Nabla Fractional Difference Equations. Ph.D.Thesis, The University of Nebraska, Lincoln, NE, USA, 2014. [Google Scholar]
- Chen, C.; Bohner, M.; Jia, B. Existence and uniqueness of solutions for nonlinear Caputo fractional difference equations. Turk. J. Math. 2020, 44, 857–869. [Google Scholar] [CrossRef]
- Mohammed, P.O. On Asymptotic Behavior Solutions for Delta Fractional Differences. Commun. Nonlinear Sci. Numer. Simul.
- Muresan, M. A Concrete Approach to Classical Analysis; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Dutka, J. The early history of the factorial function. Arch. Hist. Exact Sci. 1991, 43, 225–249. [Google Scholar] [CrossRef]
- Javadi, R.; Mesgarani, H.; Nikan, O.; Avazzadeh, Z. Solving Fractional Order Differential Equations by Using Fractional Radial Basis Function Neural Network. Symmetry 2023, 15, 1275. [Google Scholar] [CrossRef]
- Sivalingam, S.M.; Kumar, P.; Govindaraj, V. A Neural Networks-Based Numerical Method for the Generalized Caputo-Type Fractional Differential Equations. Math. Comput. Simul. 2023, 213, 302–323. [Google Scholar]
- Allahviranloo, T.; Jafarian, A.; Saneifard, R.; Ghalami, N.; Measoomy Nia, S.; Kiani, F.; Fernandez-Gamiz, U.; Noeiaghdam, S. An Application of Artificial Neural Networks for Solving Fractional Higher-Order Linear Integro-Differential Equations. Bound. Value Probl. 2023, 2023, 74. [Google Scholar] [CrossRef]
- Mohammed, P.O.; Kürt, C.; Abdeljawad, T. Bivariate discrete Mittag-Leffler functions with associated discrete fractional operators. Chaos Solit. Fractals 2022, 165, 112848. [Google Scholar] [CrossRef]
- Mohammed, P.O.; Abdeljawad, T. Discrete generalized fractional operators defined using h-discrete Mittag-Leffler kernels and applications to AB fractional difference systems. Math. Meth. Appl. Sci. 2020, 46, 7688–7713. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).