
An Approximate Analytical View of Fractional Physical Models in the Frame of the Caputo Operator



Abstract
1. Introduction
2. Preliminaries
3. Construction of HPTM
4. Construction of YTDM
5. Convergence Analysis
6. Error Estimation
7. Test Examples
7.1. Example
- Application of HPTM
- Application of YTDM
7.2. Example
- Application of HPTM
- Application of YTDM
7.3. Example
- Application of HPTM
- Application of YTDM
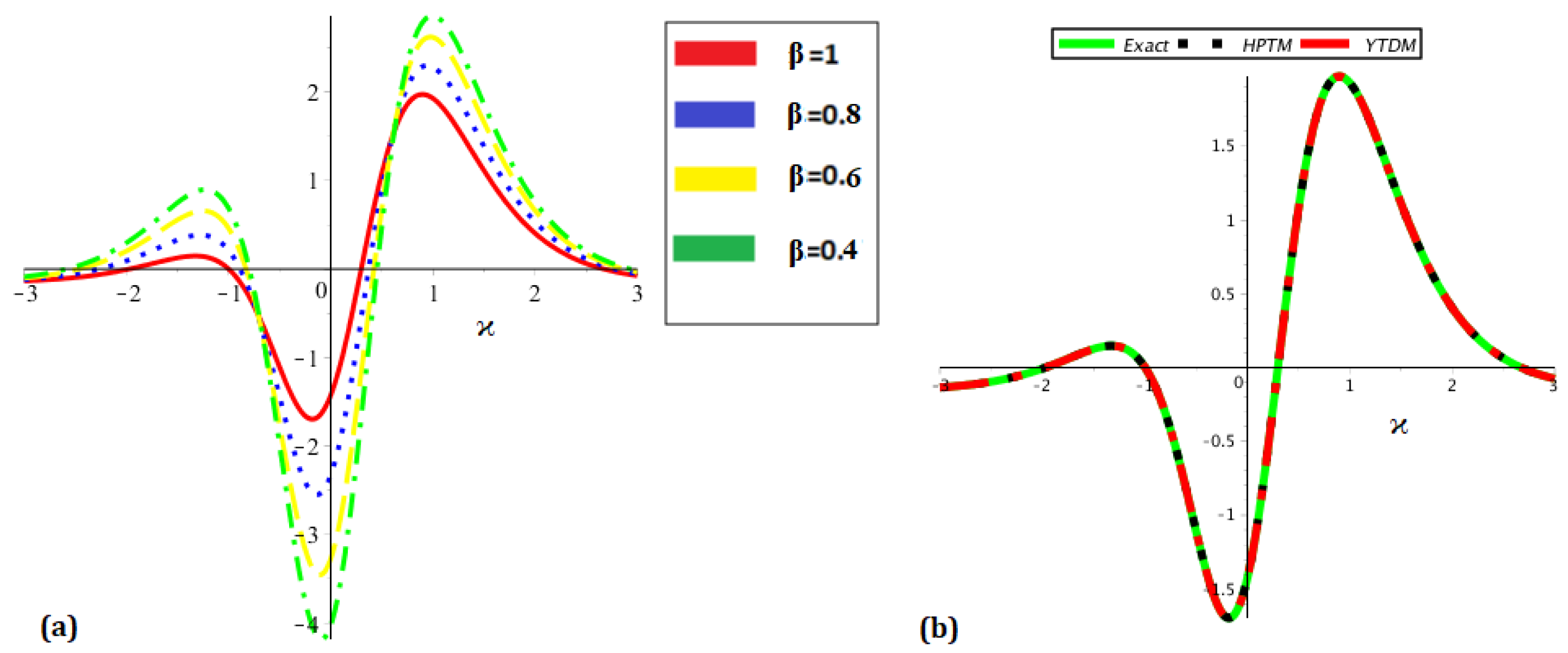
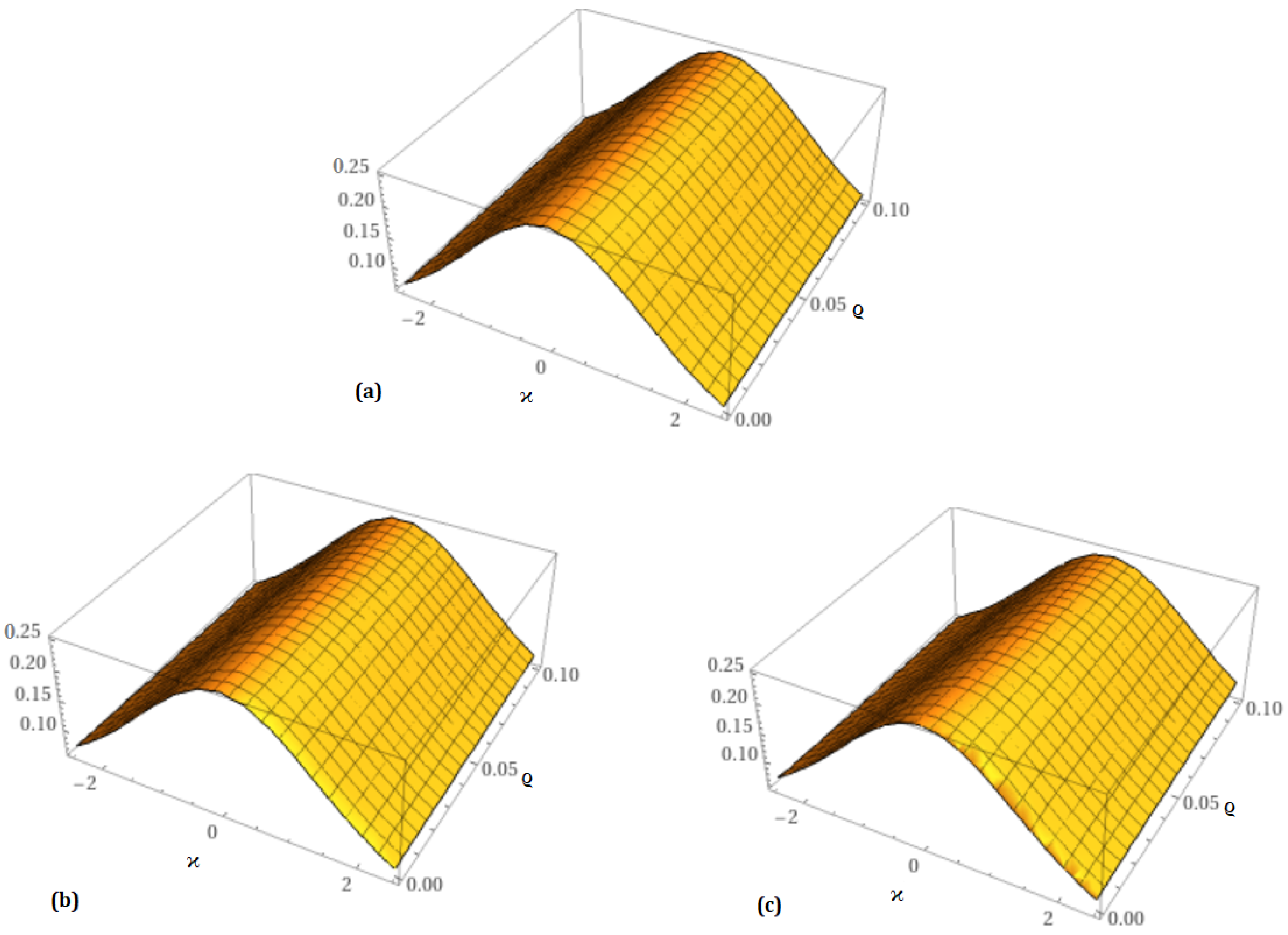
8. Physical Interpretation of Results
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Khatun, M.A.; Arefin, M.A.; Uddin, M.H.; İnç, M.; Akbar, M.A. An analytical approach to the solution of fractional-coupled modified equal width and fractional-coupled Burgers equations. J. Ocean. Eng. Sci. 2022, in press.
- Zaman, U.H.M.; Arefin, M.A.; Akbar, M.A.; Uddin, M.H. Analyzing numerous travelling wave behavior to the fractional-order nonlinear Phi-4 and Allen-Cahn equations throughout a novel technique. Results Phys. 2022, 37, 105486. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999; Volume 198. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; John Wiley and Sons: New York, NY, USA, 1993. [Google Scholar]
- Oldham, K.B.; Spanier, J. The Fractional Calculus: Theory and Applications of Differentiation and Integration to Arbitrary Order; Academic Press: New York, NY, USA, 1974. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Saad, K.M. Comparative study on Fractional Isothermal Chemical Model. Alex. Eng. J. 2021, 60, 3265–3274. [Google Scholar]
- Saad, K.M.; Alqhtani, M. Numerical simulation of the fractal-fractional reaction diffusion equations with general nonlinear. AIMS Math. 2021, 6, 3788–3804. [Google Scholar]
- Loyinmi, A.C.; Gbodogbe, S.O.; Idowu, K.O. On the interaction of the human immune system with foreign body: Mathematical modeling approach. Kathmandu Univ. J. Sci. Eng. Technol. 2023, 17. [Google Scholar] [CrossRef]
- Ganie, A.H.; Mofarreh, F.; Khan, A. On new computations of the time-fractional nonlinear KdV-Burgers equation with exponential memory. Phys. Scr. 2024, 99, 045217. [Google Scholar]
- Ganie, A.H.; Mallik, S.; AlBaidani, M.M.; Khan, A.; Shah, M.A. Novel analysis of nonlinear seventh-order fractional Kaup-Kupershmidt equation via the Caputo operator. Bound. Value Probl. 2024, 2024, 87. [Google Scholar]
- Ganie, A.H.; Mofarreh, F.; Khan, A. A fractional analysis of Zakharov-Kuznetsov equations with the Liouville-Caputo operator. Axioms 2023, 12, 609. [Google Scholar] [CrossRef]
- Mishra, N.K.; AlBaidani, M.M.; Khan, A.; Ganie, A.H. Two novel computational techniques for solving nonlinear time-fractional Lax’s Korteweg-de Vries equation. Axioms 2023, 12, 400. [Google Scholar] [CrossRef]
- El-Ajou, A.; Saadeh, R.; Dunia, M.A.; Qazza, A.; Al-Zhour, Z. A new approach in handling one-dimensional time-fractional Schrödinger equations. AIMS Math. 2024, 9, 10536–10560. [Google Scholar]
- AlBaidani, M.M.; Ganie, A.H.; Khan, A. The dynamics of fractional KdV type equations occurring in magneto-acoustic waves through non-singular kernel derivatives. AIP Adv. 2023, 13, 115215. [Google Scholar] [CrossRef]
- AlBaidani, M.M.; Aljuaydi, F.; Alharthi, N.S.; Khan, A.; Ganie, A.H. Study of fractional forced KdV equation with Caputo-Fabrizio and Atangana-Baleanu-Caputo differential operators. AIP Adv. 2024, 14, 015340. [Google Scholar] [CrossRef]
- Ganie, A.H.; AlBaidani, M.M.; Khan, A. A comparative study of the fractional partial differential equations via novel transform. Symmetry 2023, 15, 1101. [Google Scholar] [CrossRef]
- Hirota, R. The Direct Method in Soliton Theory; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Hirota, R. Exact Solutions of the Sine-Gordon Equation for Multiple Collisions of Solitons. J. Phys. Soc. Jpn. 1972, 33, 1459–1463. [Google Scholar] [CrossRef]
- Hietarinta, J. A Search for Bilinear Equations Passing Hirota’s Three-Soliton Condition. I. KdV-Type Bilinear Equations. J. Math. Phys. 1987, 28, 1732–1742. [Google Scholar] [CrossRef]
- Fan, E.; Zhang, J. Applications of the Jacobi elliptic function method to special-type nonlinear equations. Phys. Lett. A 2002, 305, 383–392. [Google Scholar] [CrossRef]
- Malfliet, W.; Hereman, W. The tanh method: I. Exact solutions of nonlinear evolution and wave equations. Phys. Scr. 1996, 54, 563. [Google Scholar] [CrossRef]
- Salupere, A. The pseudospectral method and discrete spectral analysis. In Applied Wave Mathematics: Selected Topics in Solids, Fluids, and Mathematical Methods; Springer: Berlin/Heidelberg, Germany, 2009; pp. 301–333. [Google Scholar]
- Zhang, S.L.; Wu, B.; Lou, S.Y. Painlevé analysis and special solutions of generalized Broer-Kaup equations. Phys. Lett. A 2002, 300, 40–48. [Google Scholar] [CrossRef]
- Oqielat, M.A.N.; Eriqat, T.; Al-Zhour, Z.; El-Ajou, A.; Odibat, Z. Laplace Residual Power Series Solutions of the Fractional Modified KdV System with Physical Applications. Int. J. Appl. Comput. Math. 2025, 11, 12. [Google Scholar] [CrossRef]
- Yadav, J.U.; Singh, T.R. Alternative Variational Iteration Elzaki Transform Method for Solving Time-Fractional Generalized Burgers-Fisher Equation in Porous Media Flow Modeling. Math. Methods Appl. Sci. 2025, 2025. [Google Scholar] [CrossRef]
- Aboodh, K.S. Solving porous medium equation using Aboodh transform homotopy perturbation method. Am. J. Appl. Math. 2016, 4, 271–276. [Google Scholar] [CrossRef]
- Gao, H.; Pandey, R.K.; Lodhi, R.K.; Jafari, H. Solution of Time-Fractional Black-Scholes Equations via Homotopy Analysis Sumudu Transform Method. Fractals 2025. [Google Scholar] [CrossRef]
- Wang, P.; Feng, X.; He, S. A q-homotopy analysis transformation method for solving (2+1)-dimensional coupled fractional nonlinear Schrodinger equations. Int. J. Geom. Methods Mod. Phys. 2025. [Google Scholar] [CrossRef]
- Ganie, A.H.; Khan, A.; Alharthi, N.S.; Tolasa, F.T.; Jeelani, M.B. Comparative Analysis of Time-Fractional Coupled System of Shallow-Water Equations Including Caputo’s Fractional Derivative. J. Math. 2024, 2024, 2440359. [Google Scholar] [CrossRef]
- Ganie, A.H.; Mofarreh, F.; Alharthi, N.S.; Khan, A. Novel computations of the time-fractional chemical Schnakenberg mathematical model via non-singular kernel operators. Bound. Value Probl. 2025, 2025, 2. [Google Scholar]
- Aychluh, M.; Ayalew, M. The Fractional Power Series Method for Solving the Nonlinear Kuramoto-Sivashinsky Equation. Int. J. Appl. Comput. Math. 2025, 11, 29. [Google Scholar] [CrossRef]
- Awadalla, M.; Ganie, A.H.; Fathima, D.; Khan, A.; Alahmadi, J. A mathematical fractional model of waves on Shallow water surfaces: The Korteweg-de Vries equation. AIMS Math. 2024, 9, 10561–10579. [Google Scholar]
- Dodd, R.K.; Gibbon, J.D. The prolongation structure of a higher order Korteweg-de Vries equation. Proc. R. Soc. Lond. A 1977, 358, 287–296. [Google Scholar]
- Caputo, M. Linear models of Dissipation whose Q is almost Frequency independent II. Geophys. J. R. Astr. Soc. 1967, 13, 529–539. [Google Scholar]
- Caudrey, P.J.; Dodd, R.K.; Gibbon, J.D. A new hierarchy of Korteweg-de Vries equations. Proc. R. Soc. Lond. A 1976, 351, 407–422. [Google Scholar]
- Singh, H.; Kumar, D.; Pandey, R.K. An efficient computational method for the time-space fractional Klein-Gordon equation. Front. Phys. 2020, 8, 281. [Google Scholar]
- He, J.-H. Homotopy Perturbation Technique. Comput. Methods Appl. Mech. Eng. 1999, 178, 257–262. [Google Scholar]
- He, J.-H. Variational Iteration Method—A kind of nonlinear analytical technique: Some examples. Int. J. Non-Linear Mech. 1999, 34, 699–708. [Google Scholar]
- Adomian, G. (Ed.) Solving Frontier Problems of Physics: The Decomposition Method; Springer: Dordrecht, The Netherlands, 1994. [Google Scholar]
- Jin, L. Application of the Variational Iteration Method for solving the fifth order Caudrey-Dodd-Gibbon Equation. Int. Math. Forum 2010, 5, 3259–3265. [Google Scholar]
- Wazwaz, A.M. Analytical study of the fifth order integrable nonlinear evolution equations by using the tanh method. Appl. Math. Comput. 2006, 174, 289–299. [Google Scholar]
- Xu, Y.-G.; Zhou, X.-W.; Yao, L. Solving the fifth order Caudrey- Dodd-Gibbon (CDG) equation using the exp-function method. Appl. Math. Comput. 2008, 206, 70–73. [Google Scholar]
- Wazwaz, A.M. Multiple-soliton solutions for the fifth order Caudrey-Dodd-Gibbon (CDG) equation. Appl. Math. Comput. 2008, 197, 719–724. [Google Scholar]
- Podlubny, I.; Kacenak, M. Isoclinal matrices and numerical solution of fractional differential equations. In Proceedings of the 2001 European Control Conference (ECC), Porto, Portugal, 4–7 September 2001. [Google Scholar]
- Yang, X.J.; Baleanu, D.; Srivastava, H.M. Local fractional laplace transform and applications. In Local Fractional Integral Transforms and Their Applications; Elsevier: Amsterdam, The Netherlands, 2016; p. 147178. [Google Scholar]
- Cooper, G.J. Error bounds for numerical solutions of ordinary differential equations. Numer. Math. 1971, 18, 162–170. [Google Scholar]
- Warne, P.G.; Warne, D.P.; Sochacki, J.S.; Parker, G.E.; Carothers, D.C. Explicit a-priori error bounds and adaptive error control for approximation of nonlinear initial value differential systems. Comput. Math. Appl. 2006, 52, 1695–1710. [Google Scholar]
- Yüzbaşi, Ş. A numerical approach for solving a class of the nonlinear Lane-Emden type equations arising in astrophysics. Math. Methods Appl. Sci. 2011, 34, 2218–2230. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (Appro) | (Exact) | ||||
|---|---|---|---|---|---|
| 0.0 | 0.8412492045 | 0.8412821476 | 0.8413116951 | 0.8413381923 | 0.8413382266 |
| 0.1 | 0.8347832441 | 0.8346459868 | 0.8345135197 | 0.8343858026 | 0.8343849486 |
| 0.2 | 0.8089819894 | 0.8086852743 | 0.8084011555 | 0.8081292105 | 0.8081276073 |
| 0.3 | 0.7658214625 | 0.7653876267 | 0.7649732281 | 0.7645774965 | 0.7645753904 |
| 0.4 | 0.7084342409 | 0.7078937677 | 0.7073781753 | 0.7068864044 | 0.7068840866 |
| 0.5 | 0.6406493580 | 0.6400366044 | 0.6394525467 | 0.6388959115 | 0.6388936545 |
| 0.6 | 0.5664939123 | 0.5658429627 | 0.5652228708 | 0.5646322278 | 0.5646302394 |
| 0.7 | 0.4897564694 | 0.4890978532 | 0.4884707464 | 0.4878736802 | 0.4878720841 |
| 0.8 | 0.4136762461 | 0.4130348823 | 0.4124244238 | 0.4118434074 | 0.4118422460 |
| 0.9 | 0.3407780718 | 0.3401724392 | 0.3395961584 | 0.3390478223 | 0.3390470757 |
| 1.0 | 0.2728373544 | 0.2722796467 | 0.2717490940 | 0.2712443819 | 0.2712439912 |
| Exact Solution | Our Methods Solution | Our Methods Error | LRPSM Error | HASTM Error | NTDM Error | ||
|---|---|---|---|---|---|---|---|
| 0.5 | 0 | 0.6280127585 | 0.6280127585 | 0.0000000000 | 0.0000000000 | 0.0000000000 | 0.0000000000 |
| 0.01 | 0.6388936545 | 0.6388959115 | 2.256967 | 2.26691 | 3.51211 | 6.63723 | |
| 0.02 | 0.6496327491 | 0.6496508562 | 1.810706 | 1.81241 | 2.81021 | 7.7452 | |
| 0.03 | 0.6602163246 | 0.6602775927 | 6.126800 | 6.12895 | 9.48603 | 1.38205 | |
| 0.04 | 0.6706305549 | 0.6707761209 | 1.455658 | 1.45589 | 2.24888 | 1.17 | |
| 0.05 | 0.6808615377 | 0.6811464403 | 2.849025 | 2.84925 | 4.39294 | 1.8875 | |
| 1.0 | 0 | 0.2615393671 | 0.2615393671 | 0.0000000000 | 0.0000000000 | 0.0000000000 | 0.0000000000 |
| 0.01 | 0.2712439912 | 0.2712443819 | 3.906838 | 3.99819 | 1.41429 | 7.0112 | |
| 0.02 | 0.2810871794 | 0.2810904023 | 3.222867 | 3.23987 | 2.24888 | 2.78788 | |
| 0.03 | 0.2910662174 | 0.2910774282 | 1.121086 | 1.12342 | 3.81193 | 1.2331 | |
| 0.04 | 0.3011780846 | 0.3012054598 | 2.737526 | 2.74038 | 9.02767 | 1.1006 | |
| 0.05 | 0.3114194433 | 0.3114744970 | 5.505375 | 5.50858 | 1.76163 | 1.0116 |
| (Appro) | (Exact) | ||||
|---|---|---|---|---|---|
| 0.0 | 0.8412492045 | 0.8412821476 | 0.8413116951 | 0.8413381923 | 0.8413382266 |
| 0.1 | 0.8347832441 | 0.8346459868 | 0.8345135197 | 0.8343858026 | 0.8343849486 |
| 0.2 | 0.8089819894 | 0.8086852743 | 0.8084011555 | 0.8081292105 | 0.8081276073 |
| 0.3 | 0.7658214625 | 0.7653876267 | 0.7649732281 | 0.7645774965 | 0.7645753904 |
| 0.4 | 0.7084342409 | 0.7078937677 | 0.7073781753 | 0.7068864044 | 0.7068840866 |
| 0.5 | 0.6406493580 | 0.6400366044 | 0.6394525467 | 0.6388959115 | 0.6388936545 |
| 0.6 | 0.5664939123 | 0.5658429627 | 0.5652228708 | 0.5646322278 | 0.5646302394 |
| 0.7 | 0.4897564694 | 0.4890978532 | 0.4884707464 | 0.4878736802 | 0.4878720841 |
| 0.8 | 0.4136762461 | 0.4130348823 | 0.4124244238 | 0.4118434074 | 0.4118422460 |
| 0.9 | 0.3407780718 | 0.3401724392 | 0.3395961584 | 0.3390478223 | 0.3390470757 |
| 1.0 | 0.2728373544 | 0.2722796467 | 0.2717490940 | 0.2712443819 | 0.2712439912 |
| 0.0 | 0.9602125488 | 0.9643569874 | 0.9680748874 | 0.9714095642 | 0.9744000000 |
| 0.1 | 0.9904392302 | 0.9925362180 | 0.9943131706 | 0.9958075547 | 0.9970528593 |
| 0.2 | 1.0014573480 | 1.0013532710 | 1.0010595720 | 1.0006050540 | 1.0000151990 |
| 0.3 | 0.9922549156 | 0.9899921951 | 0.9876807940 | 0.9853390759 | 0.9829829438 |
| 0.4 | 0.9634794619 | 0.9592829050 | 0.9551749023 | 0.9511628260 | 0.9472525522 |
| 0.5 | 0.9173351619 | 0.9115676279 | 0.9060098467 | 0.9006588122 | 0.8955109712 |
| 0.6 | 0.8572164277 | 0.8503175576 | 0.8437251030 | 0.8374271840 | 0.8314122178 |
| 0.7 | 0.7871841277 | 0.7796080070 | 0.7724064574 | 0.7655607516 | 0.7590531407 |
| 0.8 | 0.7114189494 | 0.7035832173 | 0.6961618533 | 0.6891314651 | 0.6824701346 |
| 0.9 | 0.6337652853 | 0.6260180752 | 0.6186998385 | 0.6117845694 | 0.6052480500 |
| 1.0 | 0.5574285929 | 0.5500337403 | 0.5430621488 | 0.5364869364 | 0.5302831645 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
AlBaidani, M.M.; Ganie, A.H.; Khan, A.; Aljuaydi, F. An Approximate Analytical View of Fractional Physical Models in the Frame of the Caputo Operator. Fractal Fract. 2025, 9, 199. https://doi.org/10.3390/fractalfract9040199
AlBaidani MM, Ganie AH, Khan A, Aljuaydi F. An Approximate Analytical View of Fractional Physical Models in the Frame of the Caputo Operator. Fractal and Fractional. 2025; 9(4):199. https://doi.org/10.3390/fractalfract9040199
Chicago/Turabian StyleAlBaidani, Mashael M., Abdul Hamid Ganie, Adnan Khan, and Fahad Aljuaydi. 2025. "An Approximate Analytical View of Fractional Physical Models in the Frame of the Caputo Operator" Fractal and Fractional 9, no. 4: 199. https://doi.org/10.3390/fractalfract9040199
APA StyleAlBaidani, M. M., Ganie, A. H., Khan, A., & Aljuaydi, F. (2025). An Approximate Analytical View of Fractional Physical Models in the Frame of the Caputo Operator. Fractal and Fractional, 9(4), 199. https://doi.org/10.3390/fractalfract9040199