Separating Mesoscale and Submesoscale Flows from Clustered Drifter Trajectories


Abstract
1. Introduction
2. Modelling Framework
2.1. Local Taylor Expansion
- are observations from drifter k at time t;
- is the spatially homogeneous time-varying background flow;
- are the model parameters for the mesoscale flow;
- is the expansion location and has no consequence to the model, other than redefining ;
- are the residual ‘submesoscale’ velocities for each drifter, assumed to be zero-mean in time, but also zero-mean in space across drifters.
2.2. Diffusivity
2.3. Model Solutions
3. Estimation and Hierarchical Modelling
3.1. Parameter Estimation
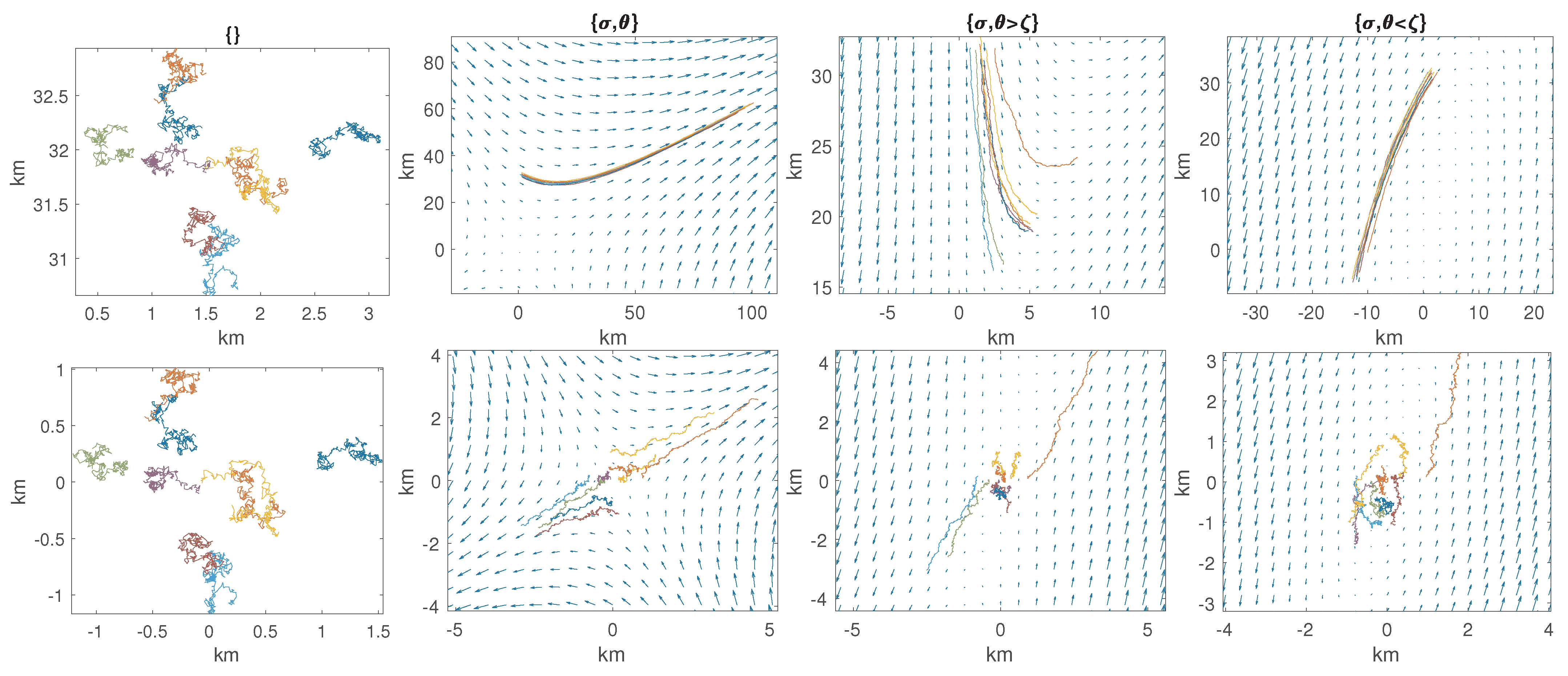
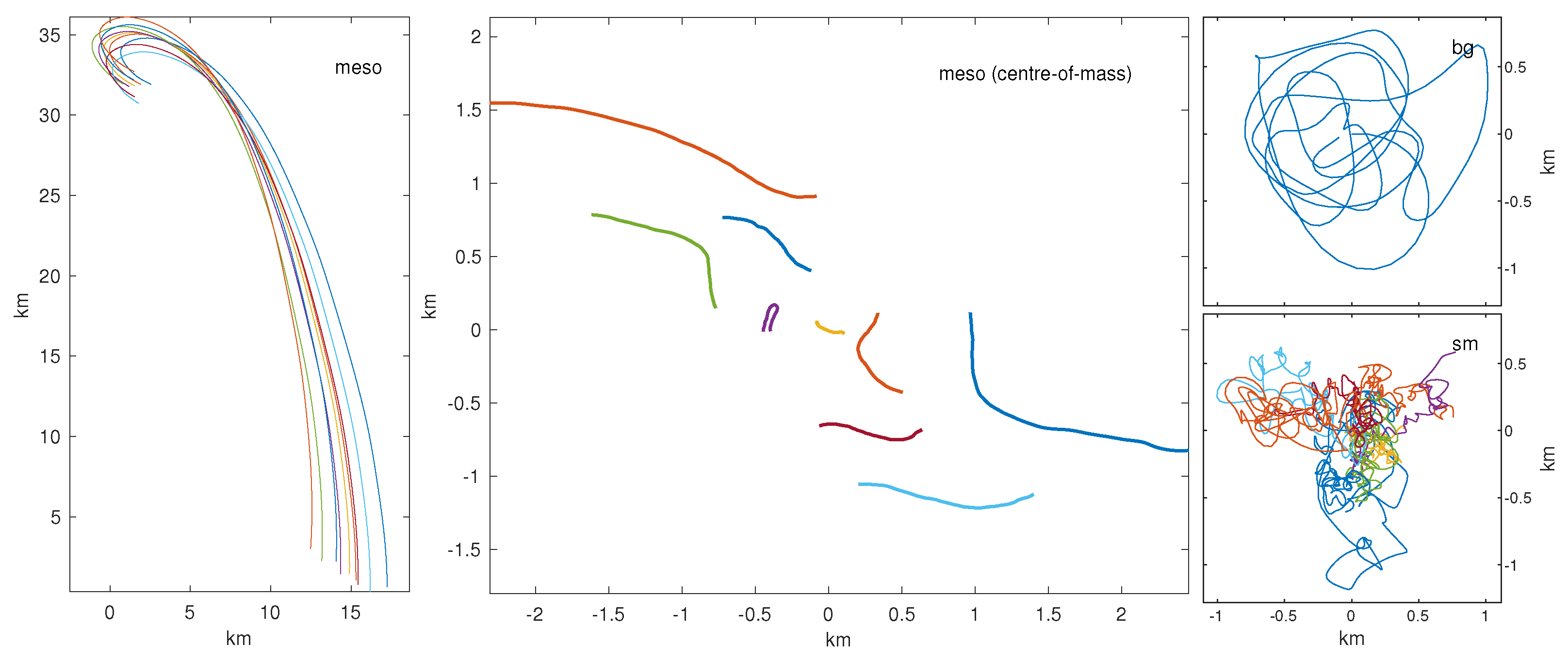
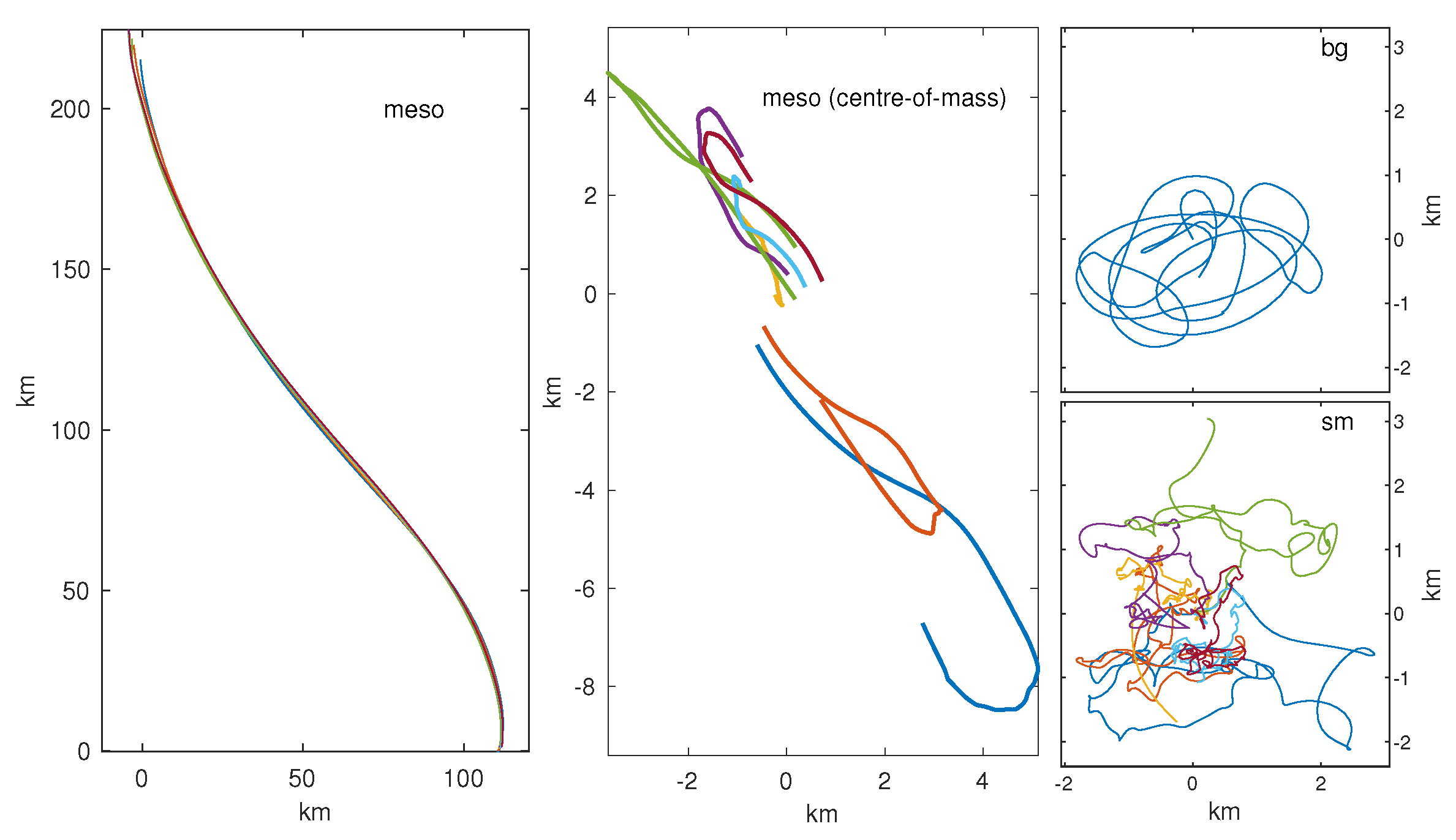
3.2. Flow Decomposition
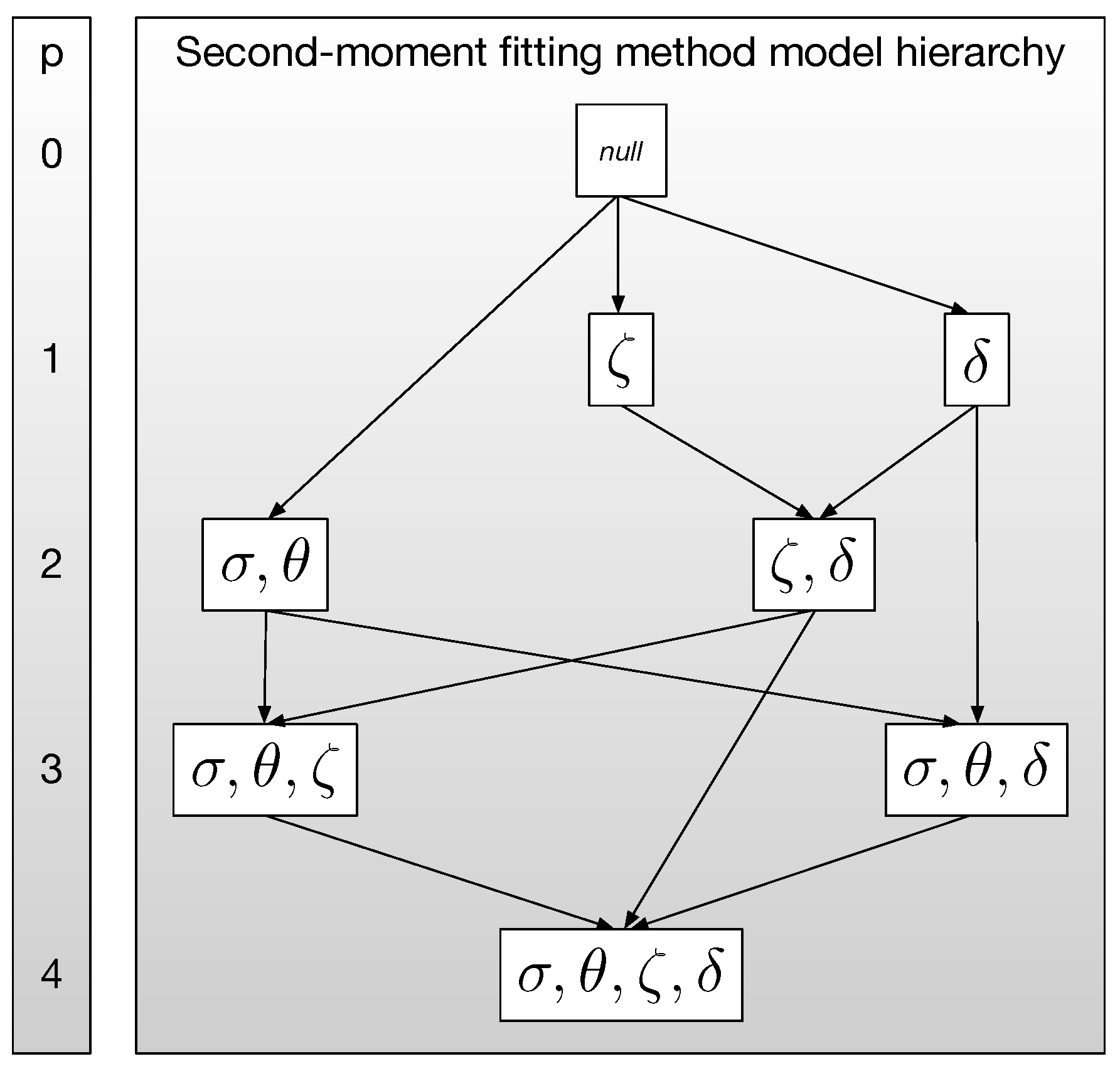
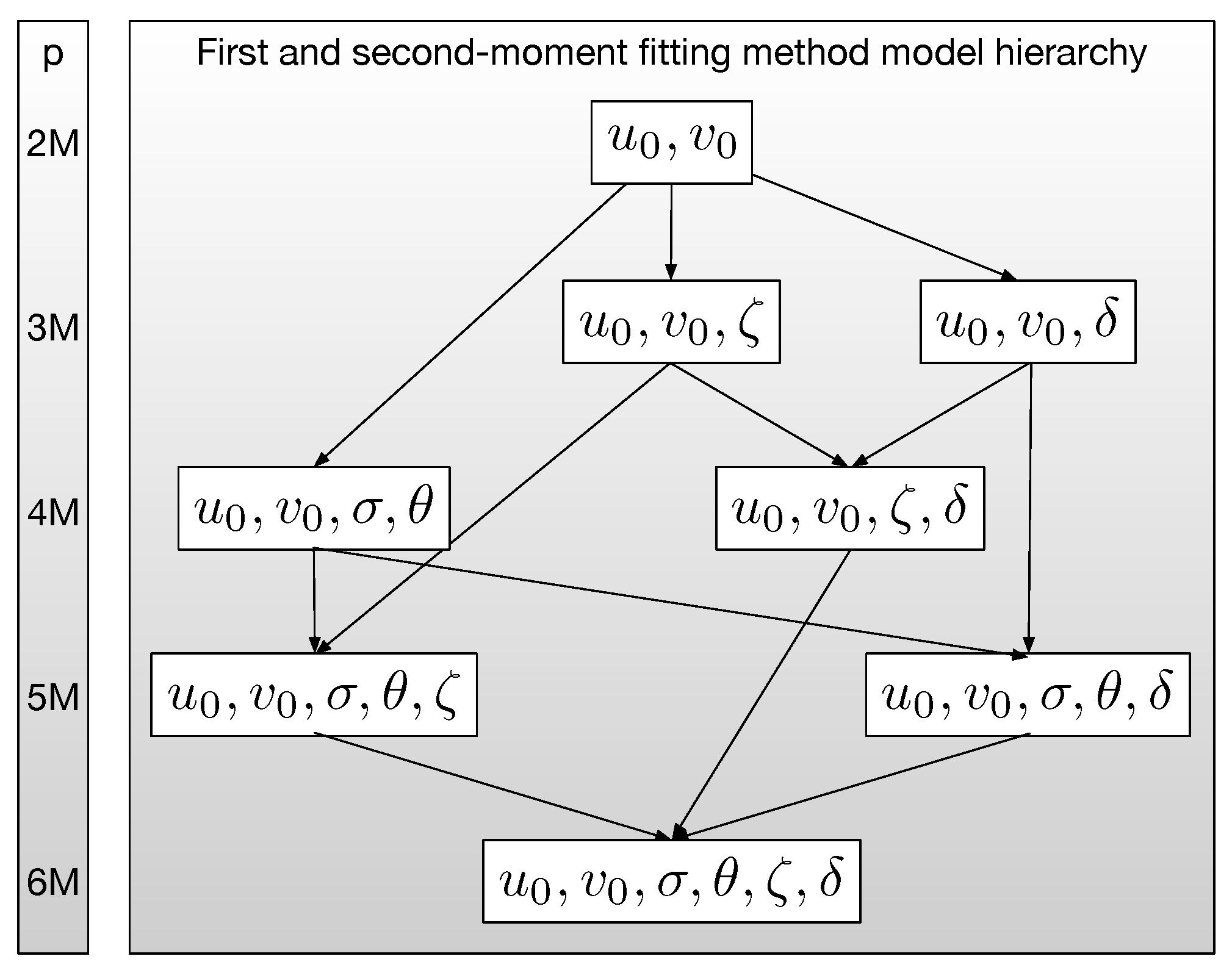
3.3. Hierarchical Modelling
3.4. Selecting between Hierarchies
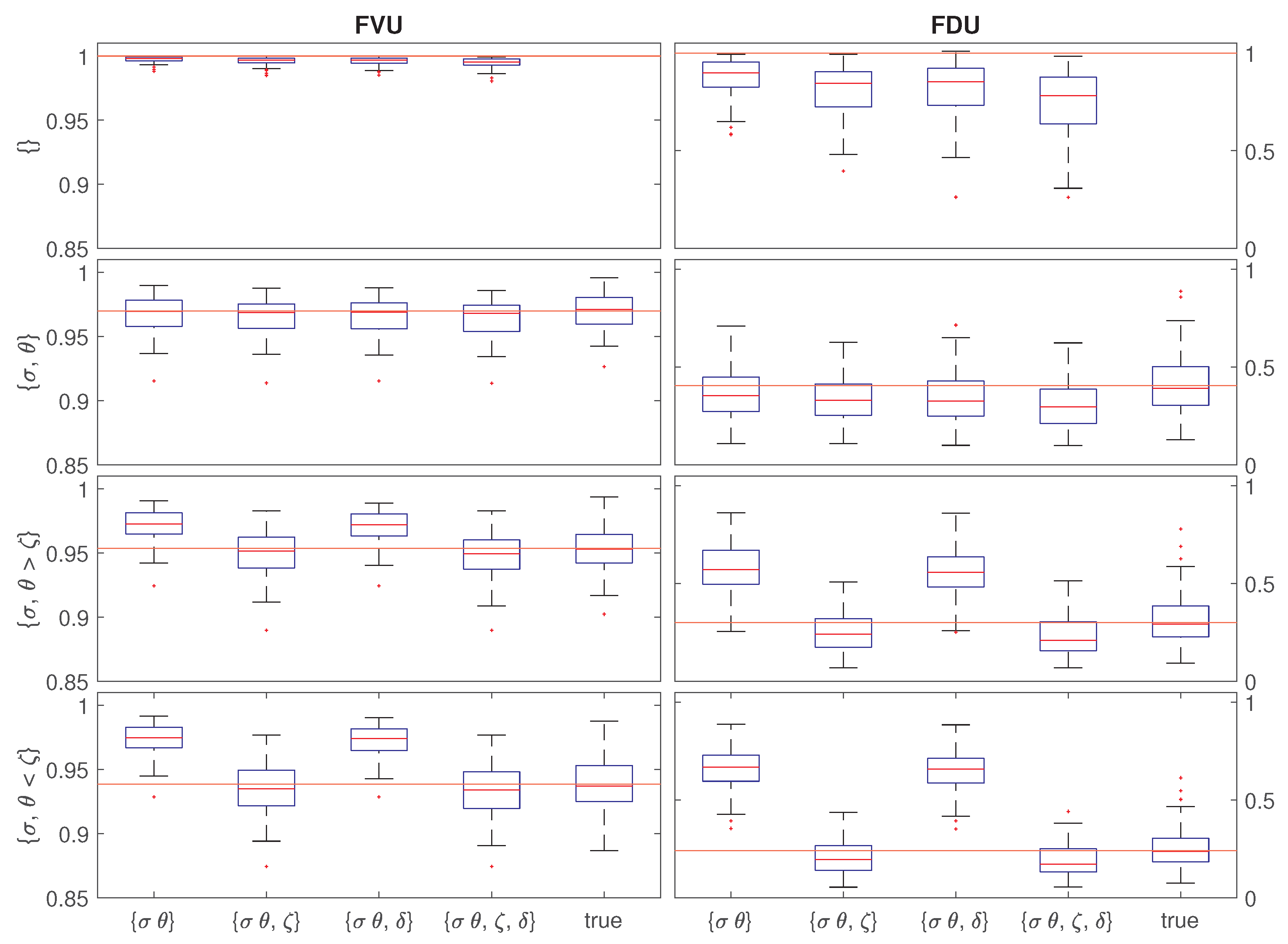
3.4.1. Fraction of Variance Unexplained (FVU)
3.4.2. Fraction of Diffusivity Unexplained (FDU)
4. Uncertainty Quantification and Capturing Temporal Evolution
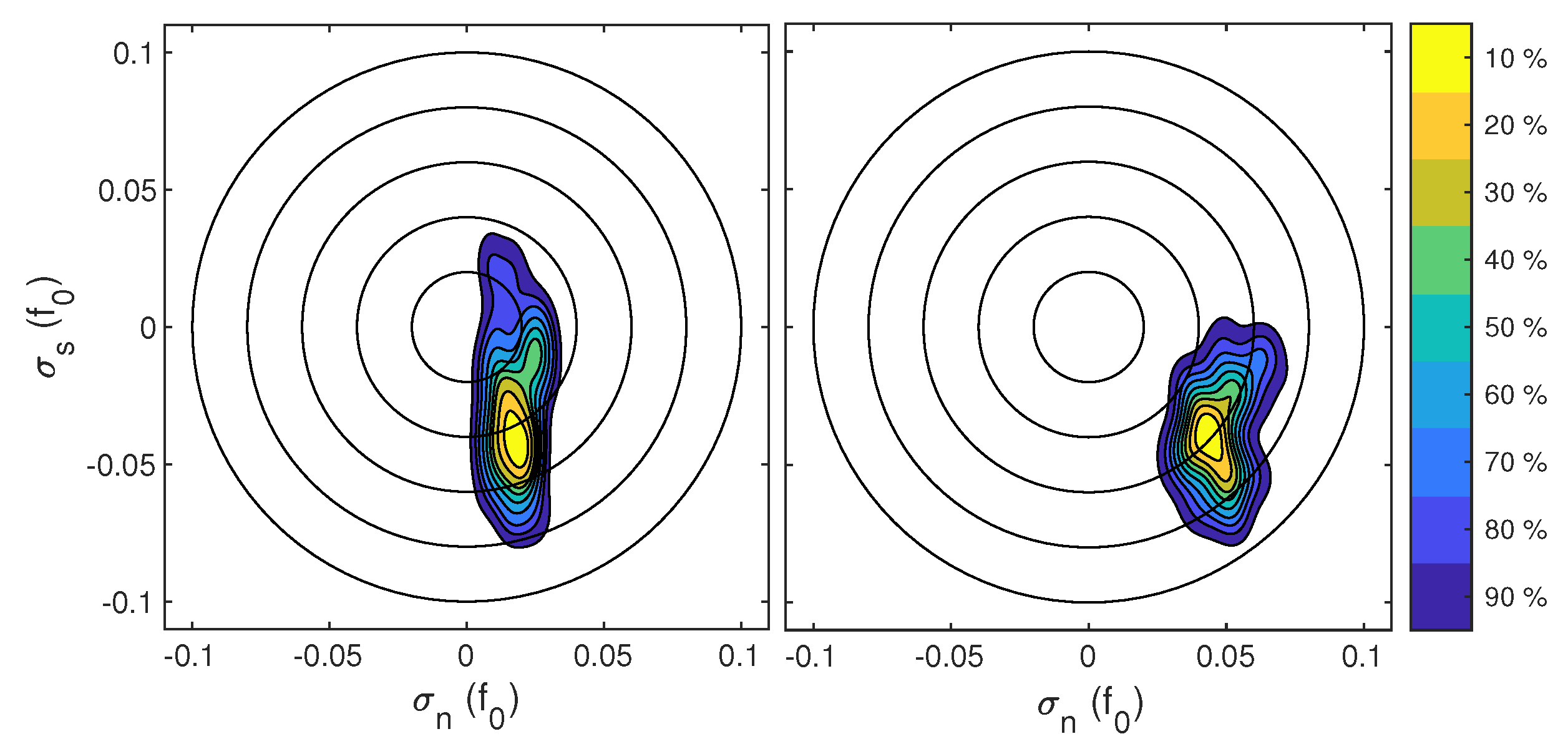
4.1. Uncertainty Quantification
4.2. Time-Evolving Parameters Using Rolling Windows
4.3. Slowly-Evolving Parameters Using Splines
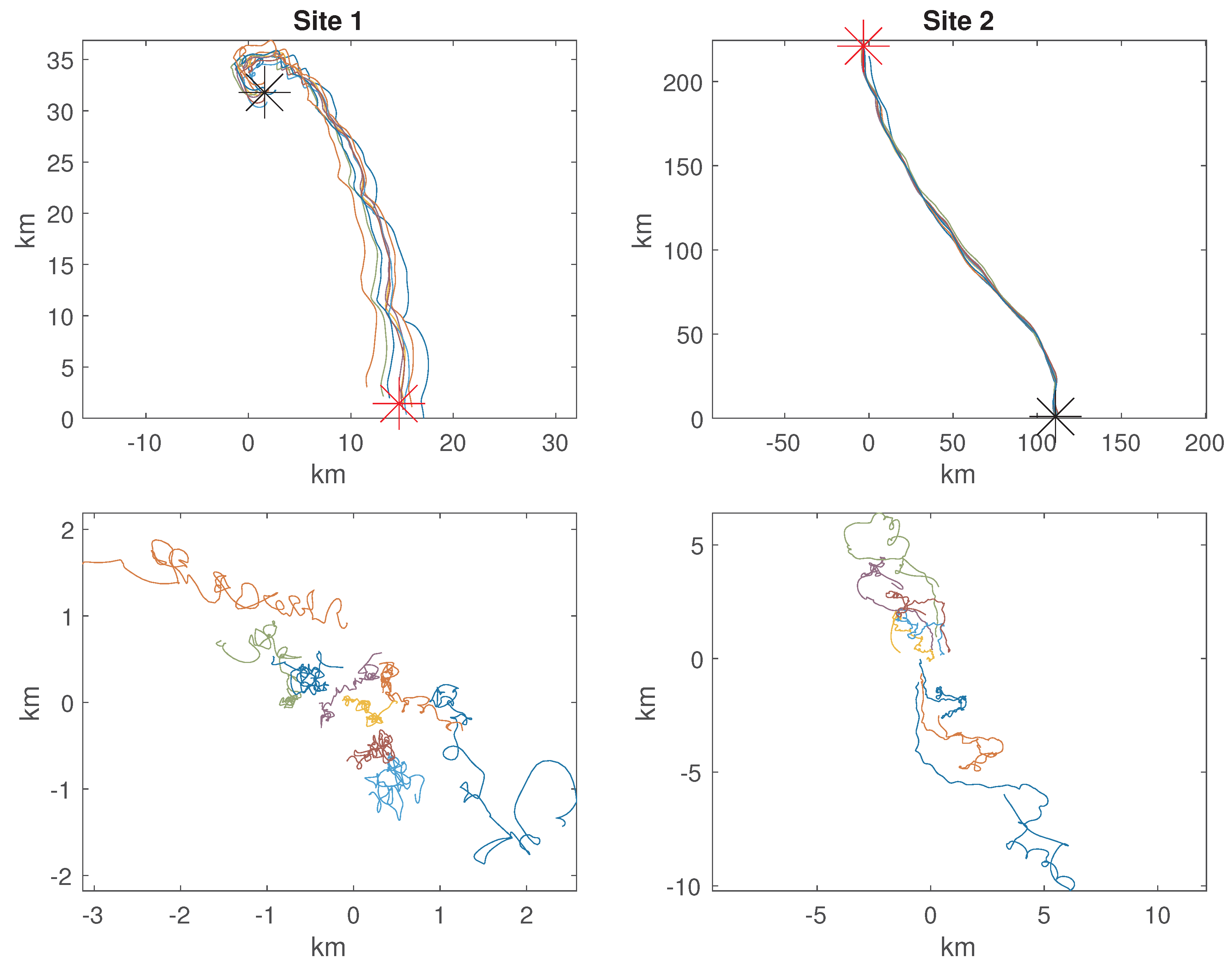
5. Application to the Latmix Experiment
5.1. Fixed Mesoscale Parameter Estimates
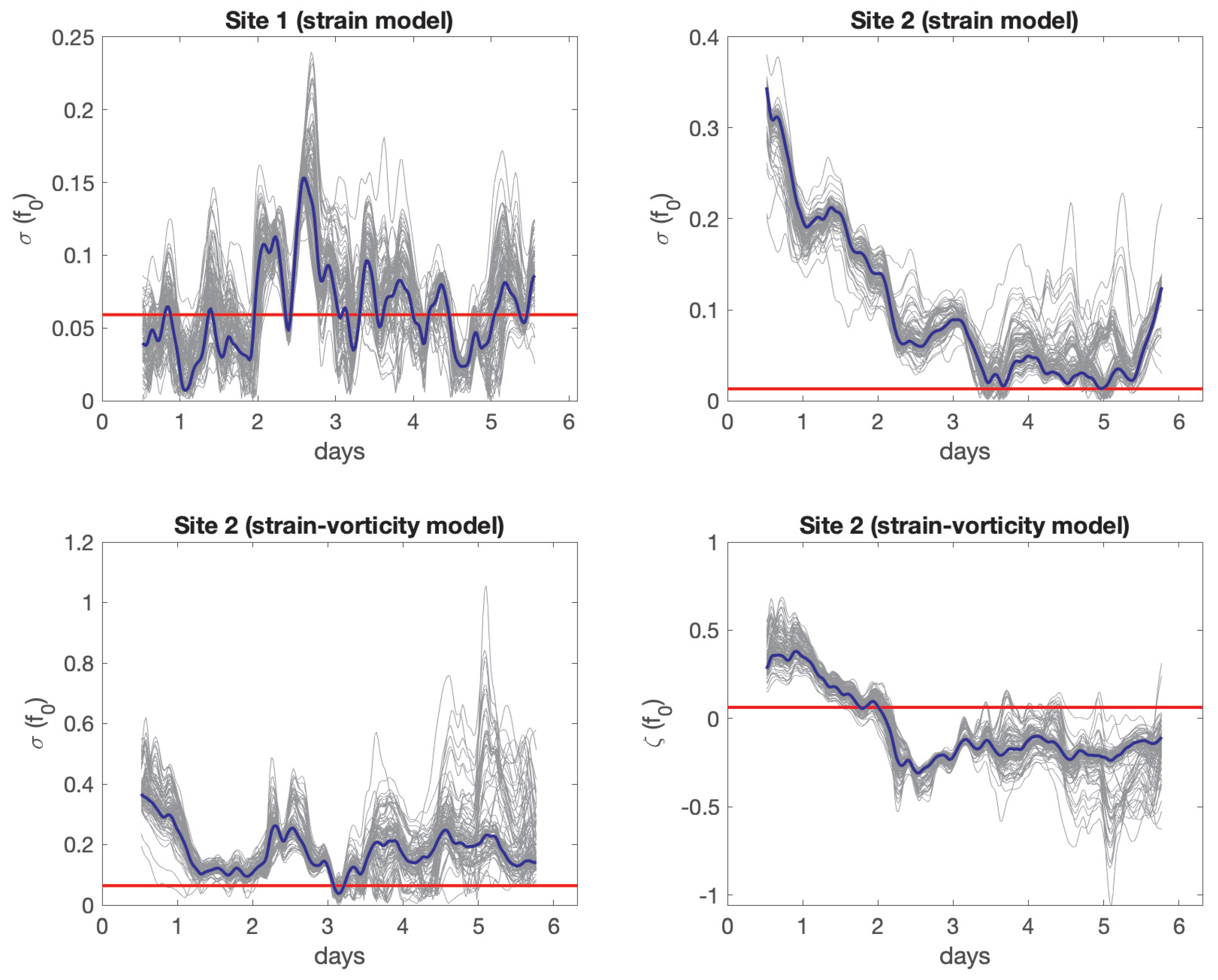
5.2. Time-Evolving Parameters Using Rolling Windows
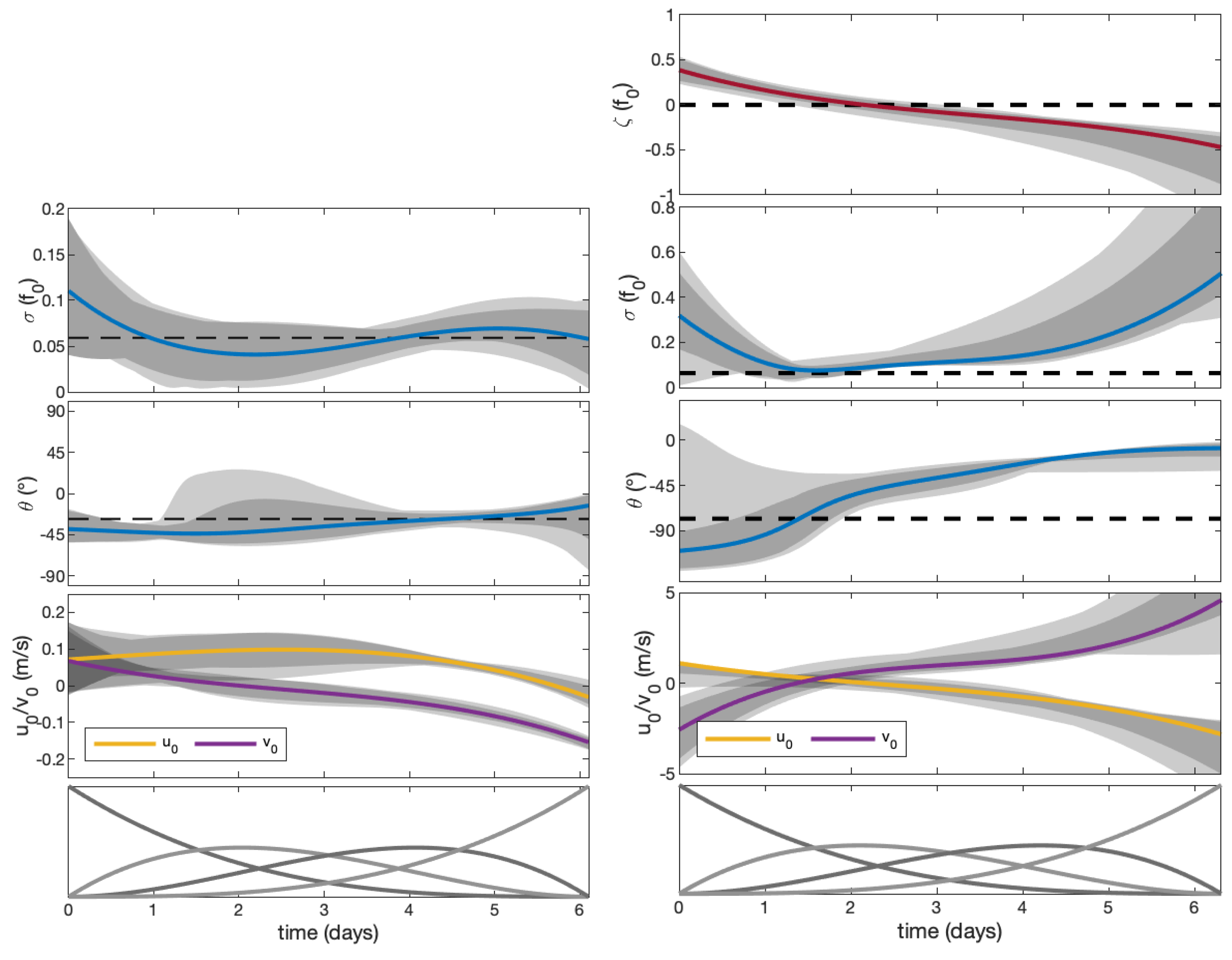
5.3. Slowly-Evolving Parameters Using Splines
6. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Sensitivity Analyses



References
- Shcherbina, A.Y.; Sundermeyer, M.A.; Kunze, E.; D’Asaro, E.; Badin, G.; Birch, D.; Brunner-Suzuki, A.M.E.G.; Callies, J.; Cervantes, B.T.K.; Claret, M.; et al. The LatMix summer campaign: Submesoscale stirring in the upper ocean. Bull. Am. Meteorol. Soc. 2015, 96, 1257–1279. [Google Scholar] [CrossRef]
- Poje, A.C.; Özgökmen, T.M.; Lipphardt, B.L.; Haus, B.K.; Ryan, E.H.; Haza, A.C.; Jacobs, G.A.; Reniers, A.J.H.M.; Olascoaga, M.J.; Novelli, G.; et al. Submesoscale dispersion in the vicinity of the Deepwater Horizon spill. Proc. Natl. Acad. Sci. USA 2014, 111, 12693–12698. [Google Scholar] [CrossRef] [PubMed]
- Gonçalves, R.C.; Iskandarani, M.; Özgökmen, T.; Thacker, W.C. Reconstruction of submesoscale velocity field from surface drifters. J. Phys. Oceanogr. 2019, 49, 941–958. [Google Scholar] [CrossRef]
- Mahadevan, A.; Pascual, A.; Rudnick, D.L.; Ruiz, S.; Tintoré, J.; D’Asaro, E. Coherent pathways for vertical transport from the surface ocean to interior. Bull. Am. Meteorol. Soc. 2020, 101, E1996–E2004. [Google Scholar] [CrossRef]
- Beron-Vera, F.J.; LaCasce, J.H. Statistics of simulated and observed pair separations in the Gulf of Mexico. J. Phys. Oceanogr. 2016, 46, 2183–2199. [Google Scholar] [CrossRef]
- Pearson, J.; Fox-Kemper, B.; Barkan, R.; Choi, J.; Bracco, A.; McWilliams, J.C. Impacts of convergence on structure functions from surface drifters in the Gulf of Mexico. J. Phys. Oceanogr. 2019, 49, 675–690. [Google Scholar] [CrossRef]
- Sundermeyer, M.A.; Price, J.F. Lateral mixing and the North Atlantic Tracer Release Experiment: Observations and numerical simulations of Lagrangian particles and a passive tracer. J. Geophys. Res. 1998, 103, 21481–21497. [Google Scholar] [CrossRef]
- Sundermeyer, M.A.; Ledwell, J.R. Lateral dispersion over the continental shelf: Analysis of dye release experiments. J. Geophys. Res. 2001, 106, 9603–9621. [Google Scholar] [CrossRef]
- Garrett, C. On the initial streakness of a dispersing tracer in two-and three-dimensional turbulence. Dyn. Atmos. Ocean. 1983, 7, 265–277. [Google Scholar] [CrossRef]
- Lodise, J.; Özgökmen, T.; Gonçalves, R.C.; Iskandarani, M.; Lund, B.; Horstmann, J.; Poulain, P.M.; Klymak, J.; Ryan, E.H.; Guigand, C. Investigating the formation of submesoscale structures along mesoscale fronts and estimating kinematic quantities using Lagrangian drifters. Fluids 2020, 5, 159. [Google Scholar] [CrossRef]
- Early, J.J.; Sykulski, A.M. Smoothing and interpolating noisy GPS data with smoothing splines. J. Atmos. Ocean. Technol. 2020, 37, 449–465. [Google Scholar] [CrossRef]
- Okubo, A.; Ebbesmeyer, C.C. Determination of vorticity, divergence, and deformation rates from analysis of drogue observations. Deep Sea Res. Oceanogr. Abstr. 1976, 23, 349–352. [Google Scholar] [CrossRef]
- Kloeden, P.E.; Platen, E. Numerical Solution of Stochastic Differential Equations; Springer Science & Business Media: Berlin, Germany, 2013; Volume 23. [Google Scholar]
- LaCasce, J. Statistics from Lagrangian observations. Prog. Oceanogr. 2008, 77, 1–29. [Google Scholar] [CrossRef]
- Lilly, J.M.; Sykulski, A.M.; Early, J.J.; Olhede, S.C. Fractional Brownian motion, the Matérn process, and stochastic modeling of turbulent dispersion. Nonlinear Process. Geophys. 2017, 24, 481–514. [Google Scholar] [CrossRef]
- Haynes, P.H. Vertical Shear Plus Horizontal Stretching as a Route to Mixing. Available online: http://www.soest.hawaii.edu/PubServices/2001pdfs/Haynes.pdf (accessed on 30 December 2020).
- Lilly, J.M. Kinematics of a fluid ellipse in a linear flow. Fluids 2018, 3, 16. [Google Scholar] [CrossRef]
- Sykulski, A.M.; Olhede, S.C.; Lilly, J.M.; Danioux, E. Lagrangian time series models for ocean surface drifter trajectories. J. R. Stat. Soc. Ser. C 2016, 65, 29–50. [Google Scholar] [CrossRef]
- Sykulski, A.M.; Olhede, S.C.; Lilly, J.M.; Early, J.J. Frequency-domain stochastic modeling of stationary bivariate or complex-valued signals. IEEE Trans. Signal Process. 2017, 65, 3136–3151. [Google Scholar] [CrossRef]
- Botev, Z.I.; Grotowski, J.F.; Kroese, D.P. Kernel density estimation via diffusion. Ann. Stat. 2010, 38, 2916–2957. [Google Scholar] [CrossRef]
- Sundermeyer, M.A.; Birch, D.A.; Ledwell, J.R.; Levine, M.D.; Pierce, S.D.; Cervantes, B.T.K. Dispersion in the open ocean seasonal pycnocline at scales of 1–10 km and 1–6 days. J. Phys. Oceanogr. 2020, 50, 415–437. [Google Scholar] [CrossRef]
- Shcherbina, A.Y.; D’Asaro, E.A.; Lee, C.M.; Klymak, J.M.; Molemaker, M.J.; McWilliams, J.C. Statistics of vertical vorticity, divergence, and strain in a developed submesoscale turbulence field. Geophys. Res. Lett. 2013, 40, 4706–4711. [Google Scholar] [CrossRef]
- Lelong, M.P.; Cuypers, Y.; Bouruet-Aubertot, P. Near-inertial energy propagation inside a Mediterranean anticyclonic eddy. J. Phys. Oceanogr. 2020, 50, 2271–2288. [Google Scholar] [CrossRef]
- Early, J.J.; Lelong, M.P.; Sundermeyer, M.A. A generalized wave-vortex decomposition for rotating Boussinesq flows with arbitrary stratification. J. Fluid Mech. 2021. [Google Scholar] [CrossRef]
- Vieira, G.S.; Rypina, I.I.; Allshouse, M.R. Uncertainty quantification of trajectory clustering applied to ocean ensemble forecasts. Fluids 2020, 5, 184. [Google Scholar] [CrossRef]
- Ohlmann, J.C.; Molemaker, M.J.; Baschek, B.; Holt, B.; Marmorino, G.; Smith, G. Drifter observations of submesoscale flow kinematics in the coastal ocean. Geophys. Res. Lett. 2017, 44, 330–337. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strain-only Simulation | |||
| Simulated Bootstrap | N/A N/A | ||
| Strain-dominated Simulation | |||
| Simulated Bootstrap |
| Fixed Estimates (Site 1) | |||||||
| model | (m/s) | FVU | FDU | ||||
| 0 | 0 | −0.000137 | 0 | 0.974 | 1.000 | 1.001 | |
| 0 | 0 | 0 | 0.0493 | 0.361 | 0.983 | 0.371 | |
| 0.0591 | −27.8 | 0 | 0 | 0.188 | 0.976 | 0.193 | |
| 0.0785 | −15.3 | −0.0443 | 0 | 0.229 | 0.971 | 0.235 | |
| 0.0489 | −25.6 | 0 | 0.0137 | 0.174 | 0.976 | 0.179 | |
| 0.0711 | −12.2 | −0.0443 | 0.0137 | 0.216 | 0.971 | 0.221 | |
| Fixed Estimates (Site 2) | |||||||
| model | (m/s) | FVU | FDU | ||||
| 0 | 0 | 0.00613 | 0 | 4.011 | 0.999 | 1.000 | |
| 0 | 0 | 0 | 0.0125 | 1.886 | 0.997 | 0.470 | |
| 0.0131 | −67.0 | 0 | 0 | 1.906 | 0.996 | 0.475 | |
| 0.0642 | 78.0 | 0.0650 | 0 | 1.950 | 0.985 | 0.486 | |
| 0.0107 | −67.9 | 0 | 0.00258 | 1.874 | 0.996 | 0.467 | |
| 0.0637 | 77.0 | 0.0650 | 0.00258 | 1.919 | 0.985 | 0.478 | |
| Rolling Estimates (Site 1) | Rolling Estimates (Site 2) | ||||||
| model | (m/s) | FVU | FDU | (m/s) | FVU | FDU | |
| 0.995 | 0.992 | 1.022 | 2.924 | 0.872 | 0.729 | ||
| 0.325 | 0.974 | 0.334 | 2.341 | 0.838 | 0.584 | ||
| 0.183 | 0.961 | 0.188 | 1.680 | 0.710 | 0.419 | ||
| 0.282 | 0.937 | 0.290 | 0.825 | 0.675 | 0.206 | ||
| 0.147 | 0.966 | 0.151 | 1.753 | 0.704 | 0.437 | ||
| 0.248 | 0.941 | 0.255 | 0.722 | 0.669 | 0.180 | ||
| Spline Estimates (Site 1) | Spline Estimates (Site 2) | ||||||
| model | (m/s) | FVU | FDU | (m/s) | FVU | FDU | |
| 1.742 | 1.025 | 1.791 | 3.059 | 0.973 | 0.697 | ||
| 0.342 | 0.983 | 0.352 | 3.438 | 0.831 | 0.783 | ||
| 0.178 | 0.976 | 0.183 | 2.118 | 0.837 | 0.483 | ||
| 1.433 | 0.997 | 1.473 | 1.041 | 0.808 | 0.237 | ||
| 0.159 | 0.974 | 0.163 | 2.501 | 0.783 | 0.570 | ||
| 1.446 | 0.996 | 1.487 | 1.466 | 0.770 | 0.334 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oscroft, S.; Sykulski, A.M.; Early, J.J. Separating Mesoscale and Submesoscale Flows from Clustered Drifter Trajectories. Fluids 2021, 6, 14. https://doi.org/10.3390/fluids6010014
Oscroft S, Sykulski AM, Early JJ. Separating Mesoscale and Submesoscale Flows from Clustered Drifter Trajectories. Fluids. 2021; 6(1):14. https://doi.org/10.3390/fluids6010014
Chicago/Turabian StyleOscroft, Sarah, Adam M. Sykulski, and Jeffrey J. Early. 2021. "Separating Mesoscale and Submesoscale Flows from Clustered Drifter Trajectories" Fluids 6, no. 1: 14. https://doi.org/10.3390/fluids6010014
APA StyleOscroft, S., Sykulski, A. M., & Early, J. J. (2021). Separating Mesoscale and Submesoscale Flows from Clustered Drifter Trajectories. Fluids, 6(1), 14. https://doi.org/10.3390/fluids6010014