Abstract
The auxiliary problem principle has been widely applied in power systems to solve the multi-area economic dispatch problem. Although the effectiveness and correctness of the auxiliary problem principle method have been demonstrated in relevant literatures, the aspect connected with accurate estimate of its convergence rate has not yet been established. In this paper, we prove the convergence rate of the auxiliary problem principle method.
1. Introduction
The auxiliary problem principle (APP) [1], originally proposed by G. Cohen in [2], has a wide range of applications in the power systems field [3,4,5,6,7,8]. In fact, the mathematical formulation of multi-area economic dispatch problem can be expressed as follows.
For solving (1), the corresponding APP iterative scheme can be expressed as follows.
Although the APP iterative scheme is known to be an efficient approach for the convex problem with separable operators [9], the theoretical analysis of its convergence rate has not been established and applied in the literature.
In 2004, Nemirovski gave a proof to show that prox-type method has the convergence rate for variational inequalities with Lipschitz continuous monotone operators, where n denotes the iteration number [10]. Then, for the same problem, the convergence rate of the projection and contraction method was proved in [11]. Inspired by these literatures, taking advantage of the variational inequality approach, the accurate estimate of alternating direction method’s convergence rate has made considerable headway in recent years. To be more exact, in 2012, Bingsheng He’s analysis indicated that the Douglas-Rachford alternating direction method has the convergence rate [12]. After that, in 2014, Yuan Shen and Minghua Xu studied the convergence rate of Ye-Yuan’s modified alternating direction method of multipliers [13].
In this paper, our aim is to investigate the convergence rate of the iterative scheme APP under the framework of variational inequality. In fact, problem (1) is equivalent to solving the following variational inequality (VI) problem: Find such that
Then, the compact form of (5)–(7) can be expressed as follows.
2. The Convergence Analysis of APP
In this section, we give a convergence analysis of iterative scheme APP under the framework of variational inequality. Meanwhile, the analysis is useful for the accurate estimate of APP’s convergence rate in thr next section. Throughout this paper, we assume the solution set of VI problem (8) is nonempty and denoted by . denotes an arbitrary (but fixed) point in the solution set .
Lemma 1.
A single iteration of APP
is equivalent to
Proof of Lemma 1.
Adding a quadratic term to the objective function (11) without changing its optimization result, then (11) can be expressed as follows.
Considering the following equation
Then, combing (15) and (16), we obtain
Removing the constant term , we get
Analogously, we have
as we wanted to prove. Thus Lemma 1 is proved. □
Lemma 2.
Let sequence is generated by the iterative scheme APP. We denote and , then we get
where
Proof of Lemma 2.
According to the description of Lemma 1 and using variational inequality approach, solving (11) and (12) is equivalent to solving which satisfies following inequalities,
Considering
Thus, the following result is given by utilizing (23)–(25)
Setting in (26), we get
Mapping F is monotone, we have
According to (8), we get
Combing (27)–(29), we get
Using (30), we obtain
Based on the above discussion, the proof of Lemma 2 is completed. □
If matrices A and B are full rank, for , we can get , and the equality hold up if and only if . It is clear that matrix M is positive definite matrix and (20) is Fejér monotone. We get
Furthermore, for general matrices A and B, (20) can be rewritten as follows.
It is clear that (33) is Fejér monotone, so we get
Lemma 3.
Let sequence is generated by the iterative scheme APP. If
then, is the solution of VI problem (8).
Proof of Lemma 3.
According to [14], solving (8) is equivalent to finding a zero point of e(w).
where denotes the projection on Ω. denotes the gradient of .
Based on the iterative scheme APP and the projection equation, we obtain
Recall (37), we get,
and hence,
Replacing the first in by (38) and using
We get
Similarly, replacing the first in by (39) and using (42), we get
Combining (41), (43) and (44), we obtain
and using
Hence, we need only prove that if satisfies
then, is the solution of problem (8).
Therefore, the proof of lemma 3 is completed. □
3. The Convergence Rate Analysis of APP
In this section, we first introduce Lemma 4 which is originally described as Theorem 2.1 in [12]. Lemma 4 provides a basic property for the solution set of VI problem.
Lemma 4.
The solution set of VI problem is convex and can be characterized as,
Lemma 4 demonstrates, for , if there is a point satisfying
then, iterative scheme APP has convergence rate.
Lemma 5.
Let sequence be generated by APP algorithm, we get
Proof of Lemma 5.
Using the following equation [12],
where H is a symmetric and positive semidefinite matrix.
Here, setting , we get
Combining Lemma 2 and (52), we obtain
Based on the above discussion, the proof of Lemma 5 is completed. □
Lemma 6.
Let be generated by APP algorithm. For any integer ,
where , , n is the iteration number, denotes the initial point.
Proof of Lemma 6.
According to lemma 5, we sum the inequality (50) over , we obtain
(55) can be rewritten as,
Because
and , are convex functions, we have,
Combining (56) and (58), we obtain,
Based on above discussion, the proof of Lemma 6 is completed. □
According to Lemmas 4 and 5, it is found that iterative scheme APP has convergence rate in an ergodic sense.
4. Numerical Experiments
In this section, we present the 40-unit test system to show the efficiency of the auxiliary problem principle. To be exact, the test system consists of two areas (area 1 and area 2). There are 25 units and 15 units in area 1 and area 2 respectively. The corresponding mathematical formulation can be expressed as follows.
is the active output of unit i in this test system. Both and denote transfer power flow between two areas. , are given variable upper and lower limits, and are given fixed parameters for objective function as shown in Table 1 [15].

Table 1.
Data for 40-Unit test sysem.
APP algorithm is employed to solve the problem. Here, parameters are selected as penalty parameter and auxiliary problem principle parameter . Stop criterion is set to be
Figure 1 and Figure 2 reflect the convergence characteristic of objective function and stop criterion for this test system, respectively. It is clear that objective function is converged to the optimal solution and the stop criterion is very close to zero when the number of iterations reaches 20. The effectiveness and correctness of the auxiliary problem principle have been demonstrated.
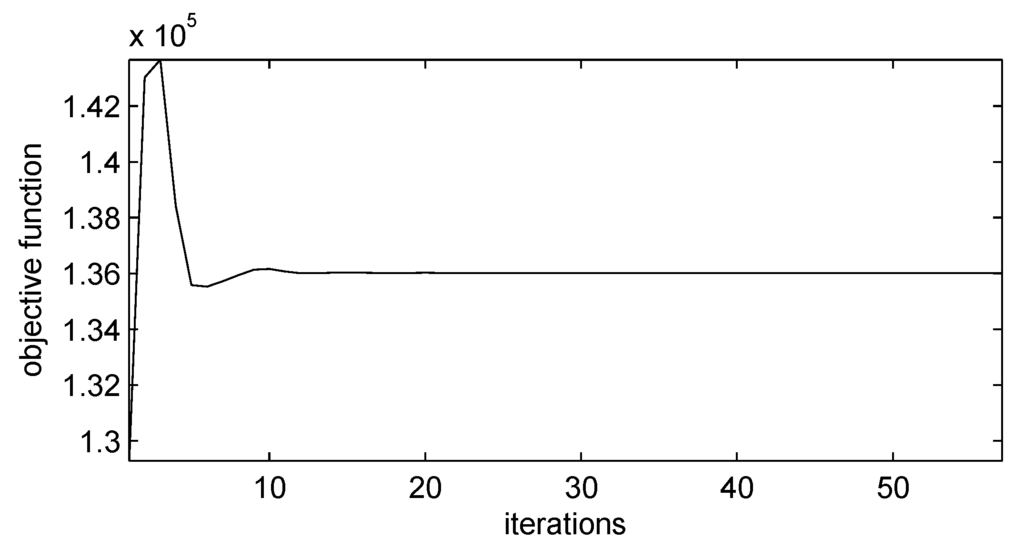
Figure 1.
Convergence characteristic of objective function.
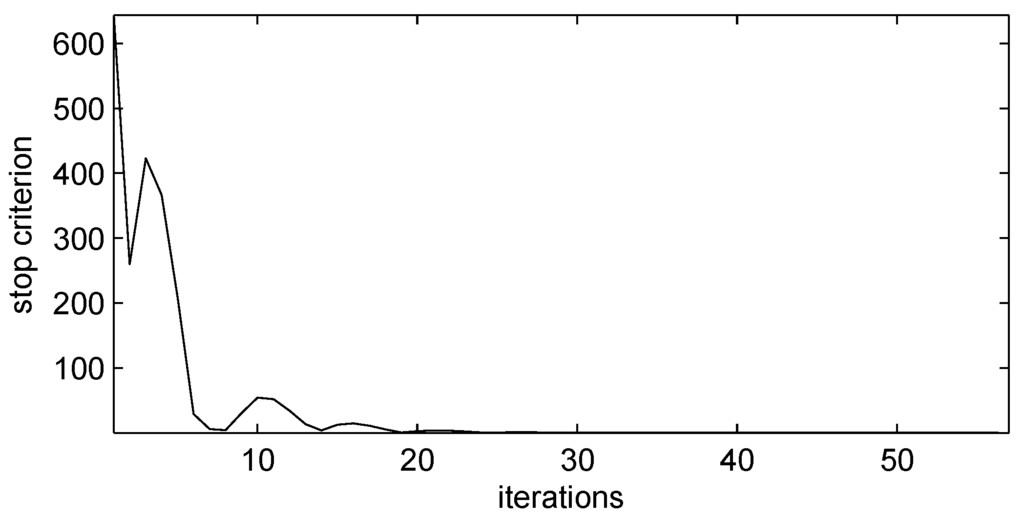
Figure 2.
Convergence characteristic of stop criterion.
5. Conclusions
In this paper, taking advantage of special characterization of variational inequality solution set, we derive the convergence rate of the auxiliary problem principle.
Acknowledgments
The authors would like to thank the reviewers for their valuable comments and suggestions to improve the present work.
Author Contributions
This research was carried out in collaboration among all two authors. Yaming Ren designed the algorithm, analyzed the data and wrote the paper. Zhongxian Chen obtained the numerical experiments data and carried out the experiments. All authors have read and approved the final manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Cohen, G.; Zhu., D.L. Decomposition coordination methods in large scale optimization problems: The non-differentiable case and the use of augmented lagrangians. Adv. Large Scale Syst. 1984, 1, 203–266. [Google Scholar]
- Cohen, G. Auxiliary problem principle and decomposition of optimization problems. J. Optim. Theory Appl. 1980, 32, 277–305. [Google Scholar] [CrossRef]
- Jiang, Q.Y.; Zhou, B.R.; Zhang, M.Z. Parallel augment lagrangian relaxation method for transient stability constrained unit commitment. IEEE Trans. Power Syst. 2013, 28, 1140–1148. [Google Scholar] [CrossRef]
- Chung, K.H.; Kim, B.H.; Hur, D. Distributed implementation of generation scheduling algorithm on interconnected power systems. Energy Convers. Manag. 2011, 52, 3457–3464. [Google Scholar] [CrossRef]
- Liu, K.; Li, Y.; Sheng, W. The decomposition and computation method for distributed optimal power flow based on message passing interface (MPI). Int. J. Electr. Power Energy Syst. 2011, 33, 1185–1193. [Google Scholar] [CrossRef]
- Kim, B.H.; Baldick, R. A comparison of distributed optimal power flow algorithms. IEEE Trans. Power Syst. 2000, 15, 599–604. [Google Scholar] [CrossRef]
- Kim, B.H.; Baldick, R. Coarse-grained distributed optimal power flow. IEEE Trans. Power Syst. 1997, 12, 932–939. [Google Scholar] [CrossRef]
- Batut, J.; Renaud, A. Daily generation scheduling optimization with transmission constraints: A new class of algorithms. IEEE Trans. Power Syst. 1992, 7, 982–989. [Google Scholar] [CrossRef]
- Beltran, C.; Heredia, F.J. Unit commitment by augmented lagrangian relaxation: Testing two decomposition approaches. J. Optim. Theory Appl. 2002, 112, 295–314. [Google Scholar] [CrossRef]
- Nemirovski, A. Prox-method with rate of convergence O(1/t) for variational inequalities with Lipschitz continuous monotone operators and smooth convex-concave saddle point problems. SIAM J. Optim. 2004, 15, 229–251. [Google Scholar] [CrossRef]
- Cai, X.J.; Gu, G.Y.; He, B.S. On the O(1/t) convergence rate of the projection and contraction methods for variational inequalities with Lipschitz continuous monotone operators. Comput. Optim. Appl. 2014, 57, 339–363. [Google Scholar] [CrossRef]
- He, B.; Yuan, X. On the O(1/n) convergence rate of the douglas-rachford alternating direction method. SIAM J. Numer. Anal. 2012, 50, 700–709. [Google Scholar] [CrossRef]
- Shen, Y.; Xu, M.H. On the O(1/t) convergence rate of Ye-Yuan’s modified alternating direction method of multipliers. Appl. Math. Comput. 2014, 226, 367–373. [Google Scholar]
- He, B.S.; Yang, H.; Wang, S.L. Alternating direction method with self-adaptive penalty parameters for monotone variational inequalities. J. Optim. Theory Appl. 2000, 106, 337–356. [Google Scholar] [CrossRef]
- Chen, P.H.; Chang, H.C. Large-scale economic-dispatch by genetic algorithm. IEEE Trans. Power Syst. 1995, 10, 1919–1926. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).