1. Introduction
Controller parameter tuning [
1] is a major challenge in system control, following controller design. Usually, the designer relies on experience or fewer numerical attempts to determine the appropriate parameters. In fact, some adjustable parameters in the controller have a great influence on the final control effect, but it is more difficult to find the optimal values of the parameters mathematically. Meanwhile, in the case of multiple parameters affecting a system simultaneously, a direct solution is almost impossible. Therefore, it is necessary to design an optimization algorithm with both speed and high accuracy to seek the optimal parameters for the real-time changing control system.
Compared to other optimization problems, the optimization objective of a control system is difficult to be directly converted into a mathematical expression. Therefore, with the help of the concept of optimal control, the dynamic parameters such as the upward adjustment and response time of the system are expressed by performance indexes to measure the control effect. At the same time, due to the complexity of the optimization target and the performance index, the classical gradient-based algorithm takes a lot of time and easily falls into the complexity of the local optimum of the objective function, while the global optimum cannot be found. For this reason, to overcome the limitations of gradient-based, a meta-heuristic algorithm is introduced to solve this problem. As a whole, meta-heuristic algorithms can be roughly divided into two categories: (1) algorithms based on a single solution, such as the simulated annealing algorithm [
2], in which the performance of the algorithm is continuously improved by simulating the temperature change in a hot object, and (2) population-based metaheuristic algorithms such as Black Widow Optimization Algorithm (BWO) [
3], Seagull Optimization Algorithm (SOA) [
4], Butterfly Optimization Algorithm (BOA) [
5], Artificial Fishing Swarms Algorithm [
6], Beluga Whale Algorithm [
7] and African Vulture Optimization Algorithm (AVOA) [
8]. Group-based algorithms exhibit intelligence through group cooperation. The gray wolf optimization algorithm is an excellent group meta-heuristic algorithm first proposed by Seyedali Mirjalili in 2014. GWO [
9] is a search method to find the optimal solution, which is mainly achieved by simulating the social hierarchy and predatory behavior of gray wolf populations. It has the advantages of fast convergence speed, high convergence accuracy and a simple implementation process, and has been widely studied and emphasized. It has been widely applied in the fields of stress distribution [
10], blood pressure monitoring [
11], fault diagnosis [
12], power systems [
13], wind prediction [
14], etc., and has achieved remarkable results.
GWO’s impressive optimization results in diverse fields prove the algorithm’s remarkable versatility and scalability in tackling problems of varying dimensions and objectives. The control parameter optimization problem is riddled with hidden constraints, making it challenging for classical metaheuristic algorithms like SA and GA to identify suitable parameters and achieve superior planning results. Meanwhile, some algorithms with relatively high computational time complexity and low accuracy, such as the Artificial Bee Colony Algorithm (ABC) [
15], the Differential Evolutionary Algorithm (DE) [
16] and the Particle Swarm Algorithm (PSO) [
17], require high flight costs due to the short computational response time required for the control problem. GWO’s superior global search capability is a key advantage. It enables the algorithm to search globally for multiple objectives, maintaining diversity in the search space and avoiding local optima through group intelligence and competition. This ensures a high level of accuracy in the global search.
However, in practical applications, due to the complexity and variability of the optimization objectives of the control parameter optimization problem, the traditional GWO algorithm has limited adaptability when it comes to complex environmental factors and constraints, and it is easy for it to fall into local optimality, which affects the search accuracy. To solve the local optimum problem, researchers usually have the following two ideas to optimize the GWO algorithm:
(1) Optimize the position-update formula or form a new combined algorithm by introducing a simple adaptive mechanism into the GWO algorithm.
Xu et al. [
18] developed a stochastic convergence factor, and Zhang et al. [
19] assessed the performance of various adaptive convergence functions and identified the most suitable convergence function for the Gray Wolf algorithm. Liu et al. [
20] introduced a nonlinear adaptive convergence factor strategy that balanced the algorithm’s global and local search capabilities, and Zheng et al. [
21] applied tent chaotic mappings, which improved the diversity of the initial populations, thereby enhancing the algorithm’s global search capacity. Chuen et al. [
22] designed a population initialization strategy based on SPM chaotic mapping. Madhiarasan et al. [
23] partitioned the population into three groups and optimized the algorithm parameters, thereby boosting the convergence rate. Di et al. [
24] proposed an adaptive search algorithm, which enhanced the algorithm’s global search capability and optimization search precision. To avoid the problem of random and blind searching in the iterative computation process, the chaotic mapping and the reverse learning mechanism are introduced into the improved optimization algorithm [
25].
(2) Optimization by mixing the optimal search strategies and ideas of different algorithms.
Saurav et al. [
24] integrate the reverse learning approach with the GWO algorithm, markedly enhancing the diversity of the initial population and expediting the algorithm’s precision. Liu et al. [
20] incorporate Powell’s algorithm into the Gray Wolf algorithm, leveraging its robust local search capability to compensate for the shortcomings of late convergence precision. Deng et al. [
26] introduce a damage repair operation in the large-scale domain search algorithm in the GA algorithm to address the deficiency in global search capability while further enhancing local search capability. Fariborz et al. [
27] incorporate a hybrid optimization algorithm, which facilitates information exchange between individuals and addresses the issue of slow convergence in the late stage. Wang et al. [
28] incorporate the somersault foraging strategy into the GWO algorithm to enhance population diversity, thereby preventing the algorithm from becoming trapped in a local optimum. She et al. [
29] incorporate a dimension learning strategy, which augments the algorithm’s global search capability. Li et al. [
30] improved the algorithm by integrating Levi’s flight and random swimming strategies, which augmented the algorithm’s local optimization capability and convergence speed. In Liang et al. [
31], the PSO algorithm was combined with the GWO algorithm, which resulted in an enhanced local search capability and accelerated convergence speed. Huang et al. [
32] improved the position update formula by combining the idea of individual superiority of the particle swarm algorithm, which led to an improved algorithmic model-solving ability. Zhang et al. [
33] introduced individual coding and POX cross-operation to overcome local stagnation and enhance global search ability. Considering that there are numerous parameters to be optimized in ADRC, an improved moth-flame optimization (MFO) is proposed to obtain ADRC parameters [
34].
Although the above methods provide two existing ideas and ways to solve the problem, the stability of single stratification may be insufficient, and the combination algorithm may affect the optimization searching effect to a certain extent due to the high time complexity and space complexity when performing the optimization objective calculation and parameter assignment. To address this problem, an improved sinusoidal gray wolf optimization algorithm (ISGWO) based on the improved sinusoidal algorithm combined with differential cross perturbation and symmetric particle crossing processing is proposed and applied to the optimization problem of control parameters.
The main contributions of this paper are as follows:
- (1)
A novel position-update formulation based on an improved sinusoidal algorithm is used to balance the global exploration and local convergence of the algorithm;
- (2)
The differential cross-perturbation strategy helps to improve the ability of the algorithm to please the local optimum;
- (3)
The particle crossing processing mechanism based on the symmetry idea helps the algorithm retain the best individual information and improve the convergence accuracy;
- (4)
The effectiveness of the ISGWO algorithm is verified through extensive statistical experiments, including CEC 2017 benchmarking and parameter-controlled optimization problems.
This paper is organized as follows.
Section 2 gives the optimization object and parameter selection.
Section 3 presents the basic mathematical model of GWO.
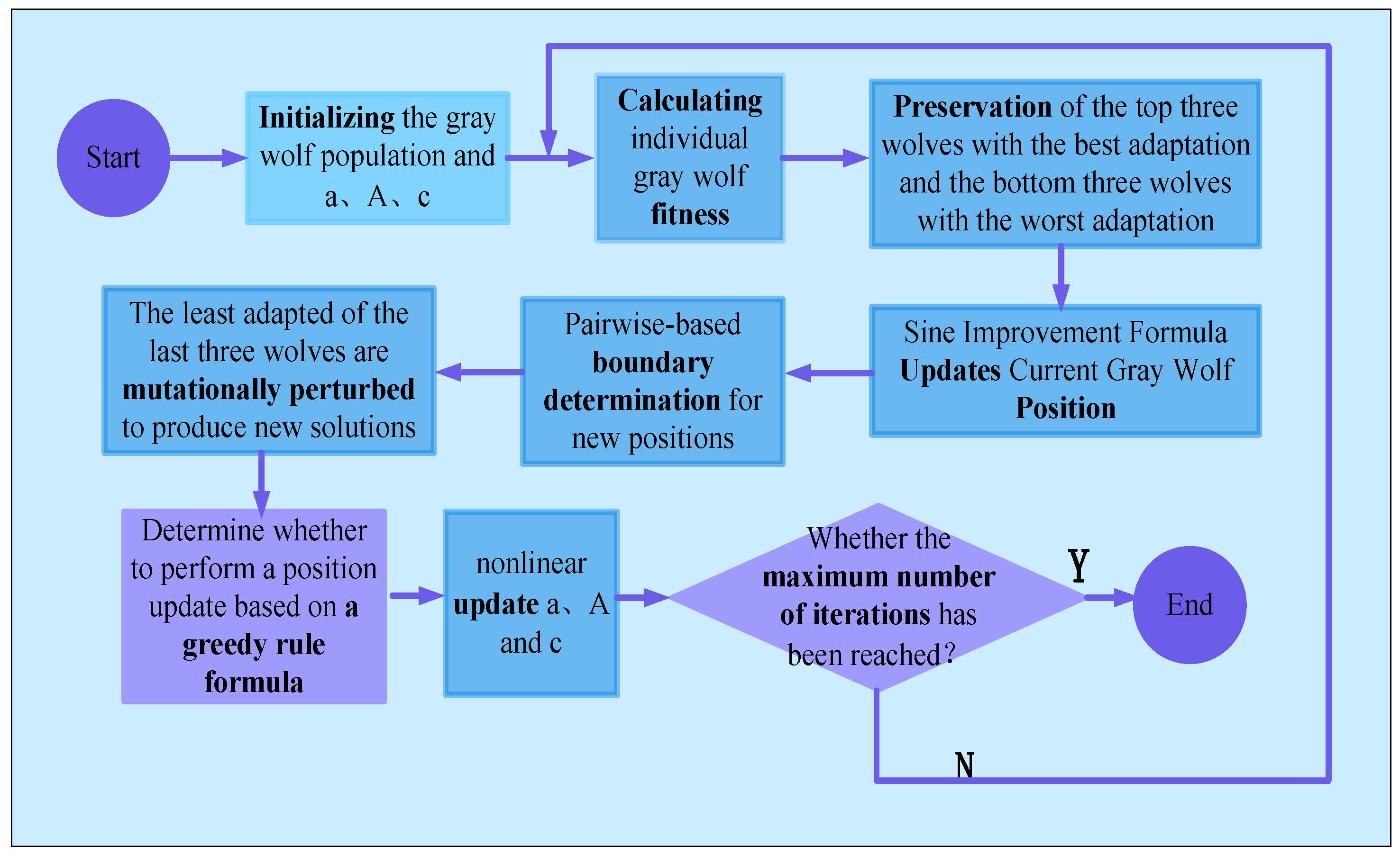
Section 4 details the design and construction of ISGWO.
Section 5 verifies the effectiveness of the ISGWO algorithm through simulation.
Section 6 summarizes the conclusions of this paper.
3. Basic Gray Wolf Optimization Algorithm
Under the harsh environment of nature, creatures, even if they do not have the high intelligence of human beings, have shown amazing group intelligence through continuous adaptation and cooperation under the incentive of the same goal, i.e., food. Based on the tightly organized system of wolf packs and their subtle collaborative hunting methods, a new group intelligence algorithm, the Gray Wolf Optimization Algorithm, is proposed in the literature.
The gray wolf population has a strict hierarchy, as shown in the diagram: the head wolf at the top of the pyramid is called , and is responsible for making decisions about hunting behavior, habitat, food allocation and other functions. Wolf is not necessarily the strongest wolf, but is the best leader and manager. The second tier of the pyramid is called , and is the replacement for when is missing from the peak. On the third level is , and takes orders from and . Older (less well-adapted) and are also relegated to the level. The lowest level, , is responsible for balancing relationships within the population.
The GWO algorithm simulates the hierarchy and hunting behavior of gray wolves in nature. The entire wolf pack is divided into
four groups. The first three groups are the best adapted three groups in order, and these three groups guide the other wolves (
) to search towards the target. During the optimization process, the wolves update the position of
. Equation (6) denotes the distance between individuals, and Equation (7) denotes the updating method of individual gray wolves:
where
denotes the distance of an individual from the food;
denotes the number of the current iteration;
. When
, the gray wolf pack expands its search range to find better food, which corresponds to local search;
, the gray wolf pack narrows its encirclement, which corresponds to local search;
. The convergence factor
is a linear decrease from 2 to 0 with the number of iterations.
is the position of the prey and
denotes the position vector for the gray wolf.
When the gray wolf judges the position of the prey, the head wolf
leads
and
to guide the pack to surround the prey, because
is the closest to the prey, so the position of the three wolves is used to judge the approximate position of the prey and gradually approach the prey; the mathematical description of this is as follows:
where
denotes the current position of
,
denotes the current position of
and
denotes the current position of
.
denotes a random vector, and
denotes the current gray wolf position vector. This Equation defines the length and direction of the front progress of wolf
towards
, respectively.
After the fitness ranking, gray wolf individuals outside the top three randomly update their positions near prey (i.e., the optimal solution) under the guidance of the current best three wolves. The basic principle is the sum of three position difference vectors, adding random quantities to avoid falling into local optimal. The location update formula is shown below
5. Simulation Analysis
5.1. Experimental Environment and Parameter Settings
In this experiment, the test environment is a 64-bit Windows 10 operating system, and the experimental software is MATLAB R2016a to execute the algorithm operation. The processor is Intel(R) Core(TM)i7-8550U and RAM is 8192 MB. At the same time, to fully prove the feasibility and accuracy of the ISGWO algorithm, and also to ensure that the results of the algorithm operation are relatively fair, this paper will unify the test methods and test data of the algorithm in the simulation experiments. The number of populations is set to 100, the maximum number of iterations is 5000, and all experiments are run independently 20 times to prevent the influence of randomness in the algorithm running results, and the mean, standard deviation and average time of the experimental results are recorded.
5.2. Test Functions
In order to verify the applicability, effectiveness and efficiency of the ISGWO algorithm, 29 test functions in the CEC2017 test set are selected in this paper, and the specific information of the test functions is shown in
Table 4. Among them, F1–F2 are single-peak functions, F3–F9 are simple multi-peak functions, F10–F19 are hybrid functions and F20–F29 are composite functions
5.3. Analysis of Experimental Data
To verify whether the ISGWO algorithm has a more prominent performance of optimization search and whether it can master enough competitiveness in the core field of optimization algorithms, this paper mainly selects GWO, BGWO and FGWO to conduct comparative experiments. From the experimental intuition, this paper took the control algorithm, and e test function to obtain the mean, standard deviation and time as shown in the statistics of
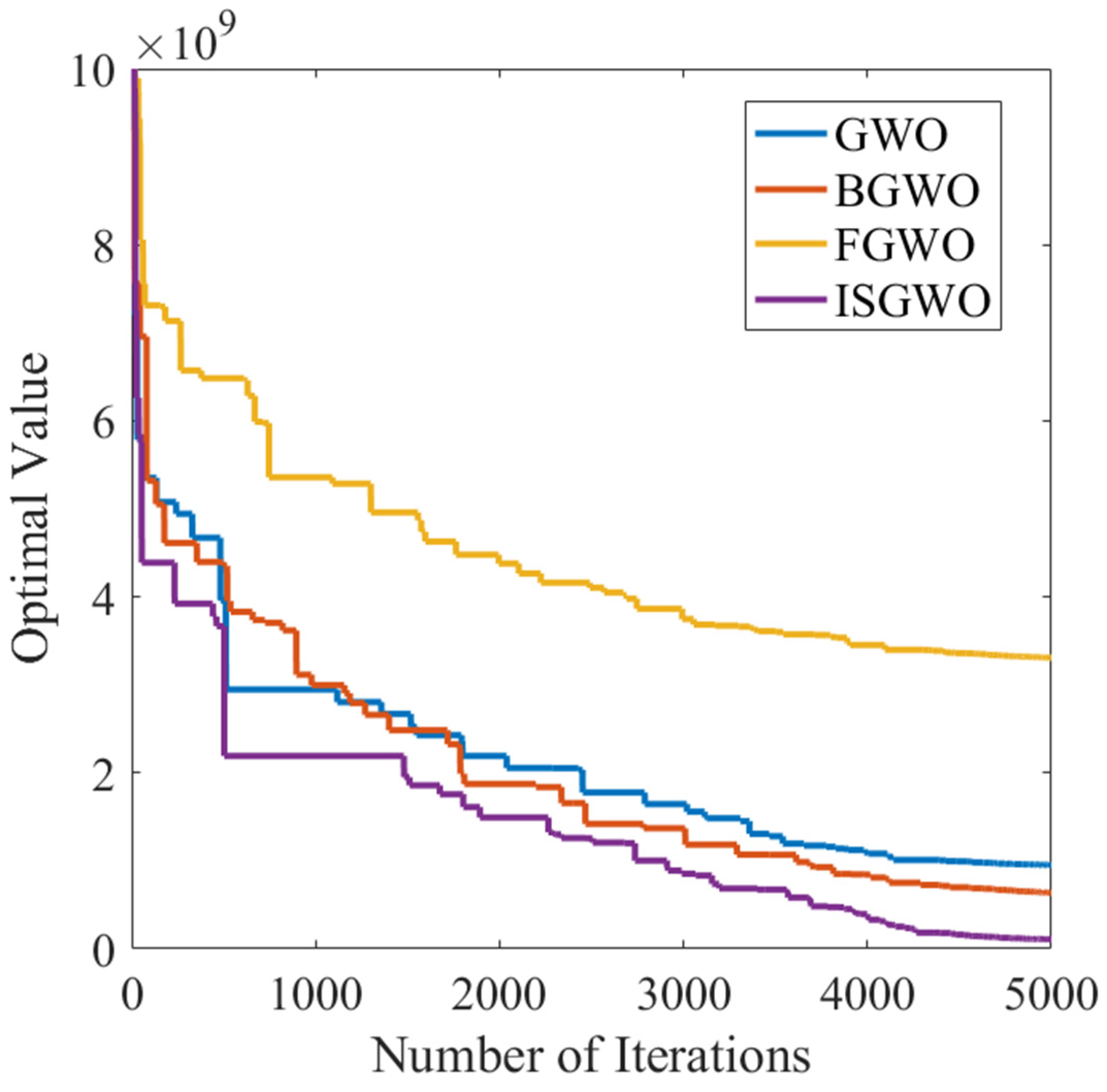
Table 5. At the same time, the convergence curve of each test function is plotted for convergence analysis, and the intercepted part is shown in
Figure 2 for space consideration.
Since the single-peak function has a unique global optimal solution, the data values of the F1–F2 counts can be used to determine the convergence of each of the tested algorithms during execution. Of the four compared algorithms, ISGWO has the best optimal solution search capability for the F2 function and exhibits the best accuracy in terms of standard deviation.
For simple multi-modal functions, i.e., the presence of multiple peaks in the function construction, this fully validates the algorithm’s ability to perform a global search. The statistical analysis of the test functions allows us to determine the accuracy of the algorithm. It can be seen that for simple multi-modal functions, there is a very small difference between the solution accuracies of the different algorithms, with an average difference of only one order of magnitude. Among the three evaluation metrics, ISGWO is in the leading position in terms of optimization accuracy and computation time in the test.
To test the optimization ability of the algorithms in large-scale and difficult environments, we will analyze the algorithmic accuracy for hybrid functions F5–F13 and combinatorial functions F14–F20. For hybrid functions, ISGWO shows good search ability and algorithmic stability. In F5–F13, the average solution accuracy of ISGWO in the F5 and F7 functions is closest to the theoretical optimal solution, showing the ability to find the optimal solution under large-scale complex conditions. The analysis results of the F16 function show that ISGWO outperforms the other algorithms in the three aspects of the mean, standard deviation and computational speed, demonstrating excellent robustness and stability in the hybrid test function.
Finally, by analyzing the accuracy values of complex functions F21–F29, we can see that as the difficulty of the test environment increases, the difference in the search accuracy of each comparative algorithm in the test function gradually decreases. In the F24 function, the mean and standard deviation values of the ISGWO algorithm reach the optimal values of the other algorithms. In the F21, F25, F26 and F28 functions, the ISGWO algorithm’s ability to solve these functions is significant and stable due to the small standard deviation values. However, ISGWO outperforms other algorithms in all aspects of control parameter tuning.
Combined with the convergence diagram, it can be seen that for the unimodal test function F1, the ISGWO algorithm not only has the fastest global convergence speed but also the smallest convergence value. This fully shows that ISGWO algorithm performs better in this kind of test function than other algorithms.
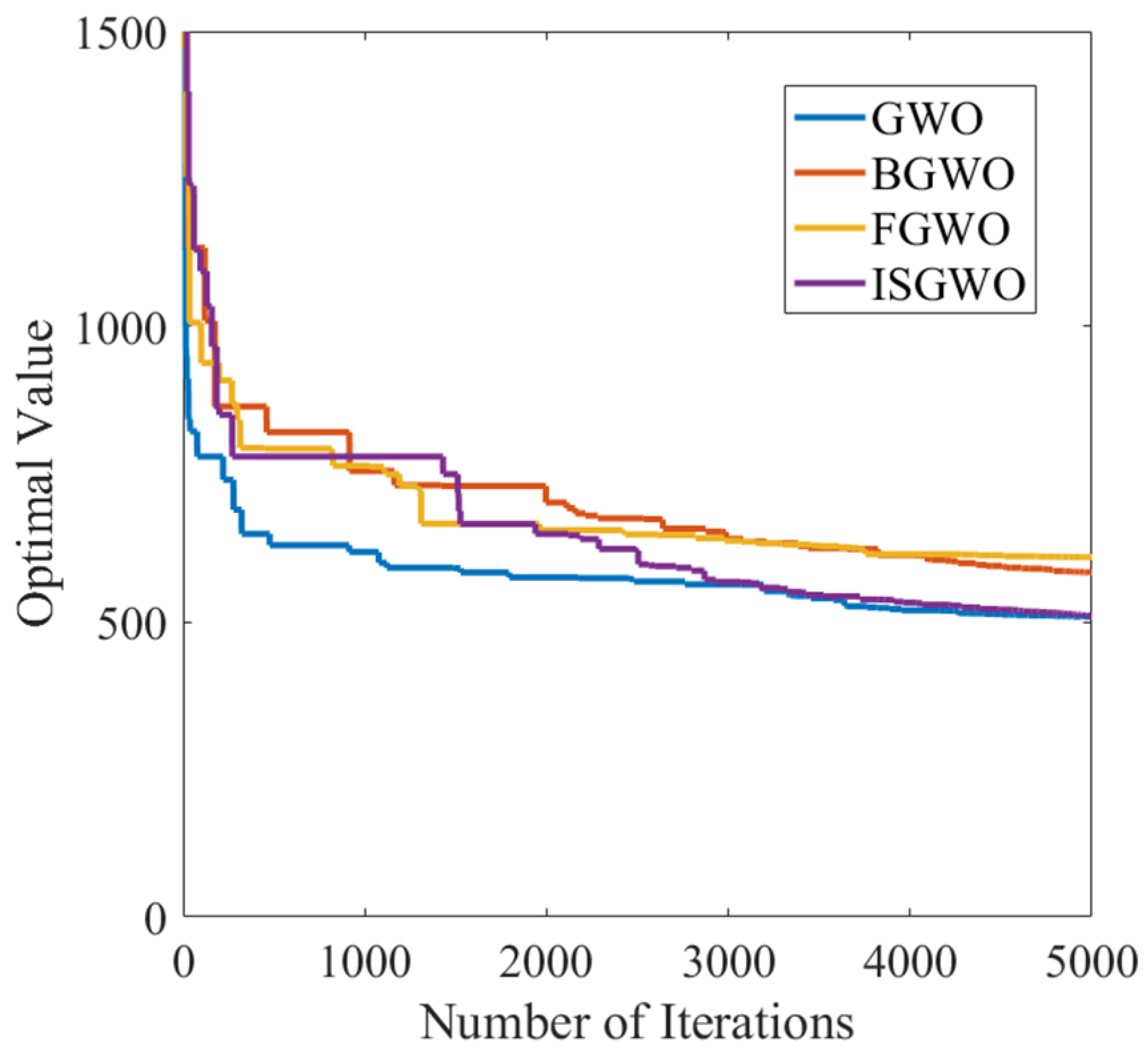
ISGWO also maintains the fastest convergence speed and small convergence value in the optimization process of multi-peak test function represented by F3 test function in
Figure 3. At the same time, the F4 test function shows the ability of ISGWO algorithm to find the best through strong local search in the later stage in
Figure 4. In addition, the optimization object in this paper is a complex system, and the performance of ISGWO in mixed functions and combined functions is more important.
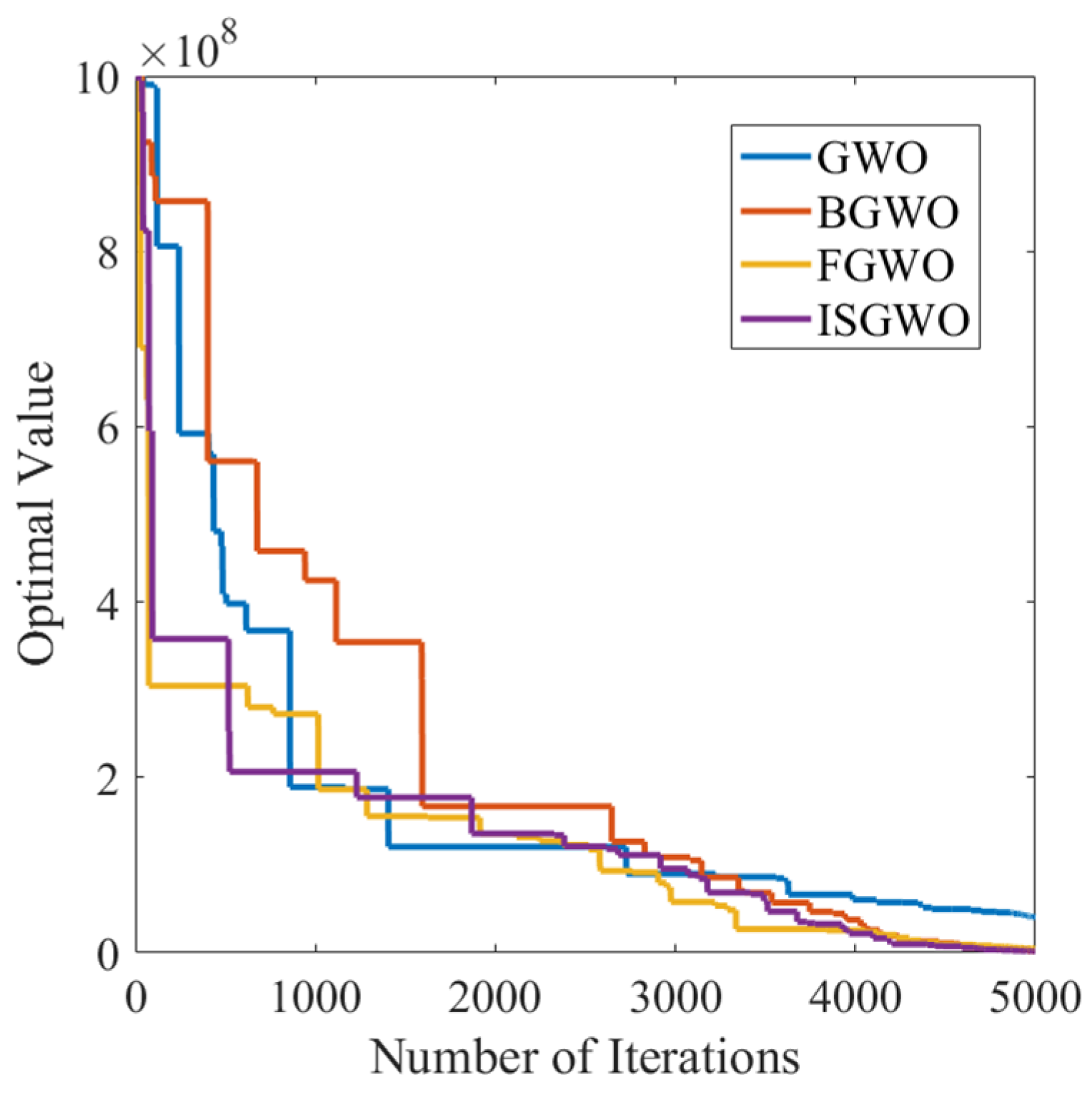
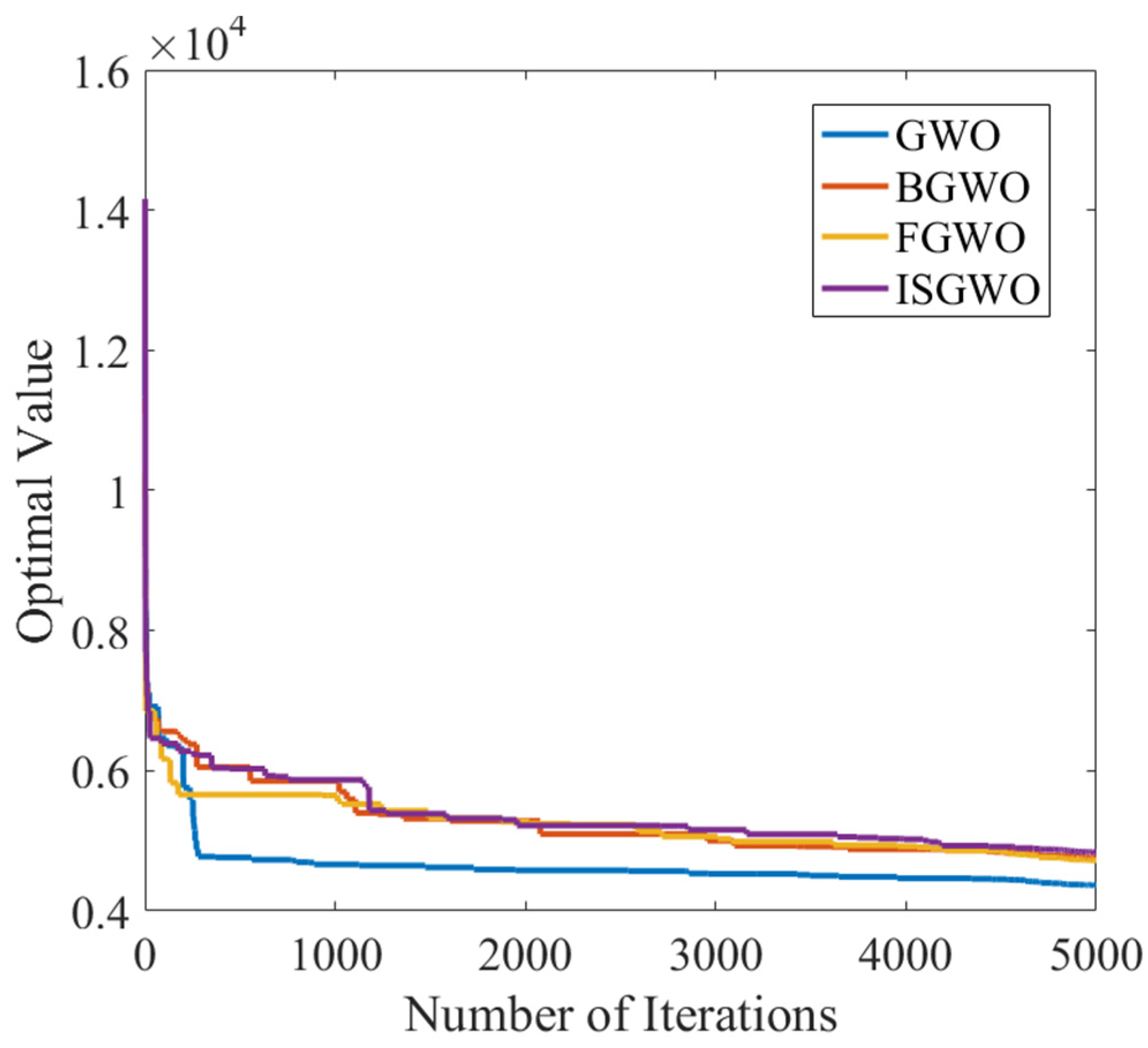
In the optimization process of the mixed function F12 in
Figure 5, ISGWO shows a fast convergence rate, which is not only fast in 10 iterations, but also far ahead in 800 iterations. In the optimization process of test function F16 in
Figure 6, the ISGWO algorithm avoids the trap of local optimization and finds the optimal solution with smaller adaptation value while ensuring fast convergence.
Finally, in the convergence of F21 in
Figure 7, the ISGWO algorithm shows a significant advantage in its ability to coordinate global and local search. This shows that ISGWO not only has a good balance of global exploration capability, but also has significant local exploitation performance in the optimization process of mixed function and combined function. The convergence analysis of the above four kinds of different test functions shows that ISGWO algorithm has good stable convergence and global searching ability from different angles.
5.4. Comprehensive Evaluation of Algorithms
According to CEC2017, the evaluation criteria will be divided into three sections:
1, The 25 points for the first part come from the sum of the mean error values for each test function
where
is the average of all counts and
is the combined error. The score for the first part can then be obtained:
2, The 25 points for the second part come from the ordering of the different algorithms in each test function
where
is the composite of all the rankings. The score for the second part can then be obtained:
3, The 50 points for the third part come from the runtime of the different algorithms in each test function
where
is the composite of all the rankings. The score for the second part is then available:
4, Finally, the three scores above are added together
Table 6 shows that the BGWO algorithm performs the best in terms of accuracy but has the worst speed. On the other hand, the FGWO algorithm excels in speed but lacks precision. In contrast, the proposed ISGWO algorithm achieves a balance between accuracy and speed, demonstrating significant performance improvement in the same order of magnitude as the best algorithm.
5.5. Optimization Analysis of Servo System Parameters
Although ISGWO performs well in test functions, performance in real systems is more important. According to literature [
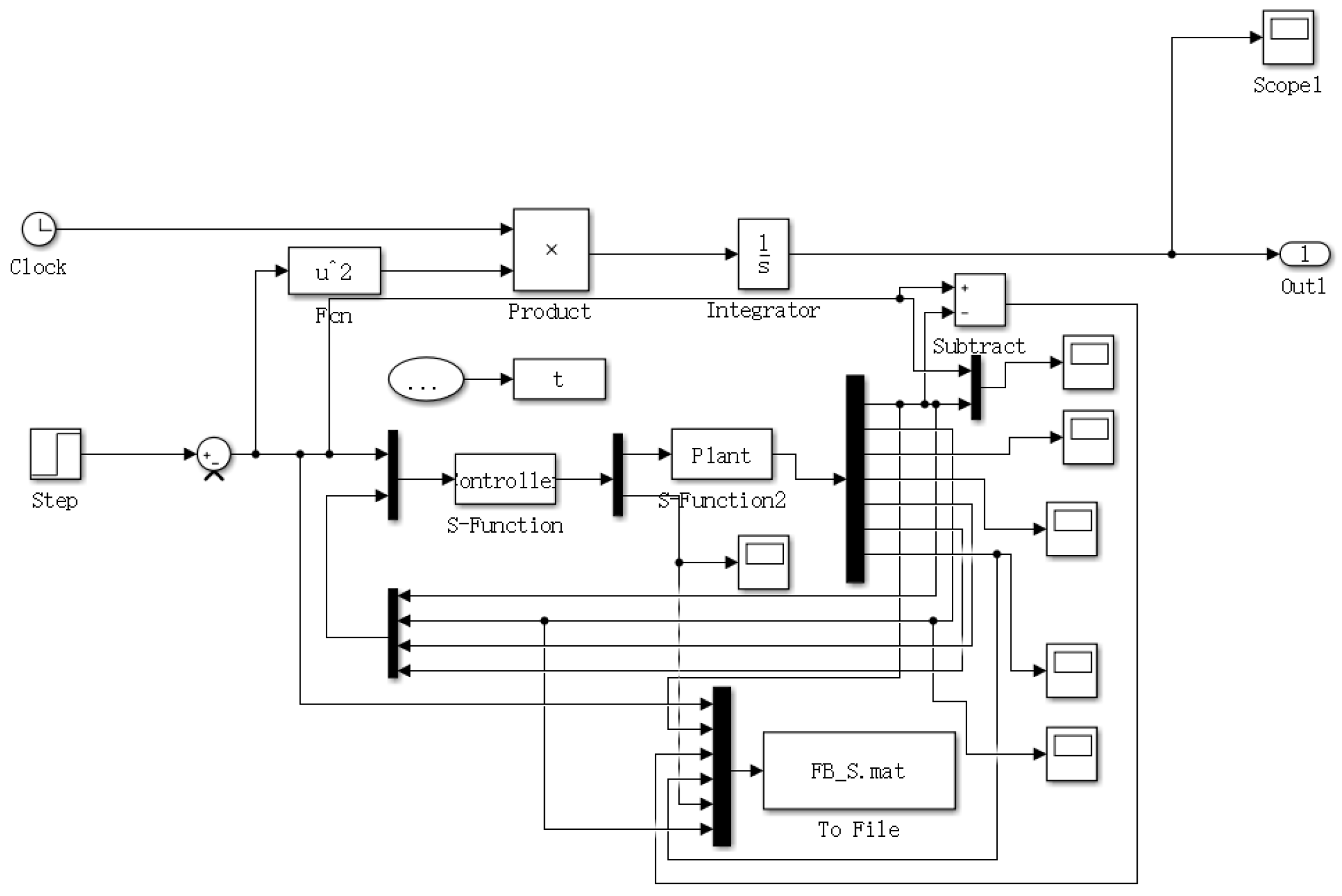
36], a control system is established as an optimization object, and the system parameters are shown in
Table 7. The overall structure of the control system and optimization function established in Simulink is shown in
Figure 8.
Considering the optimization parameters as individual population individuals, the number of population individuals in the algorithm is uniformly 1 and the maximum number of iterations is 500.
Under the step input, the four optimization functions perform 500 iterations of each of the four parameters. The initial parameter values and optimization values are shown in
Table 8.
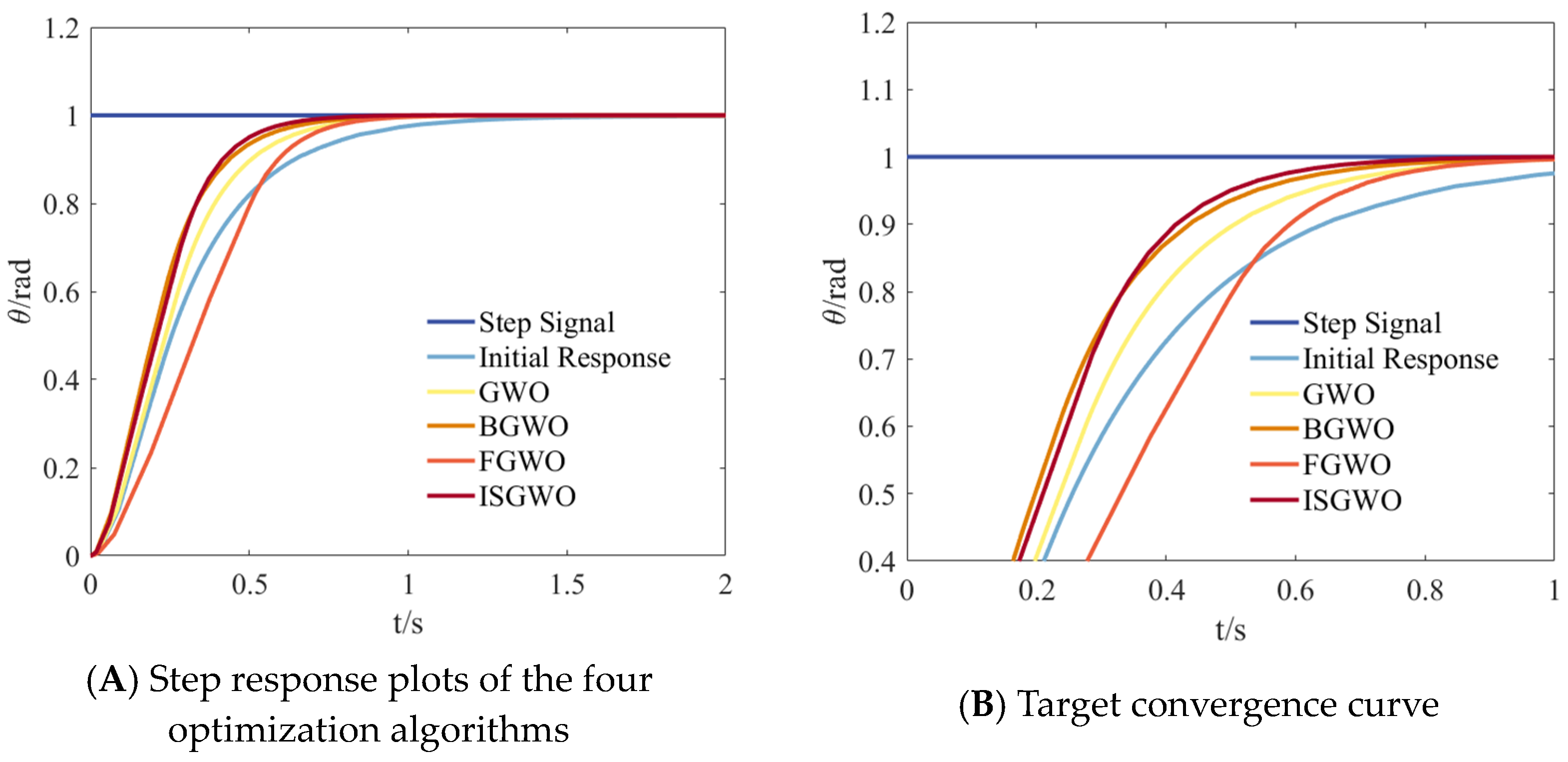
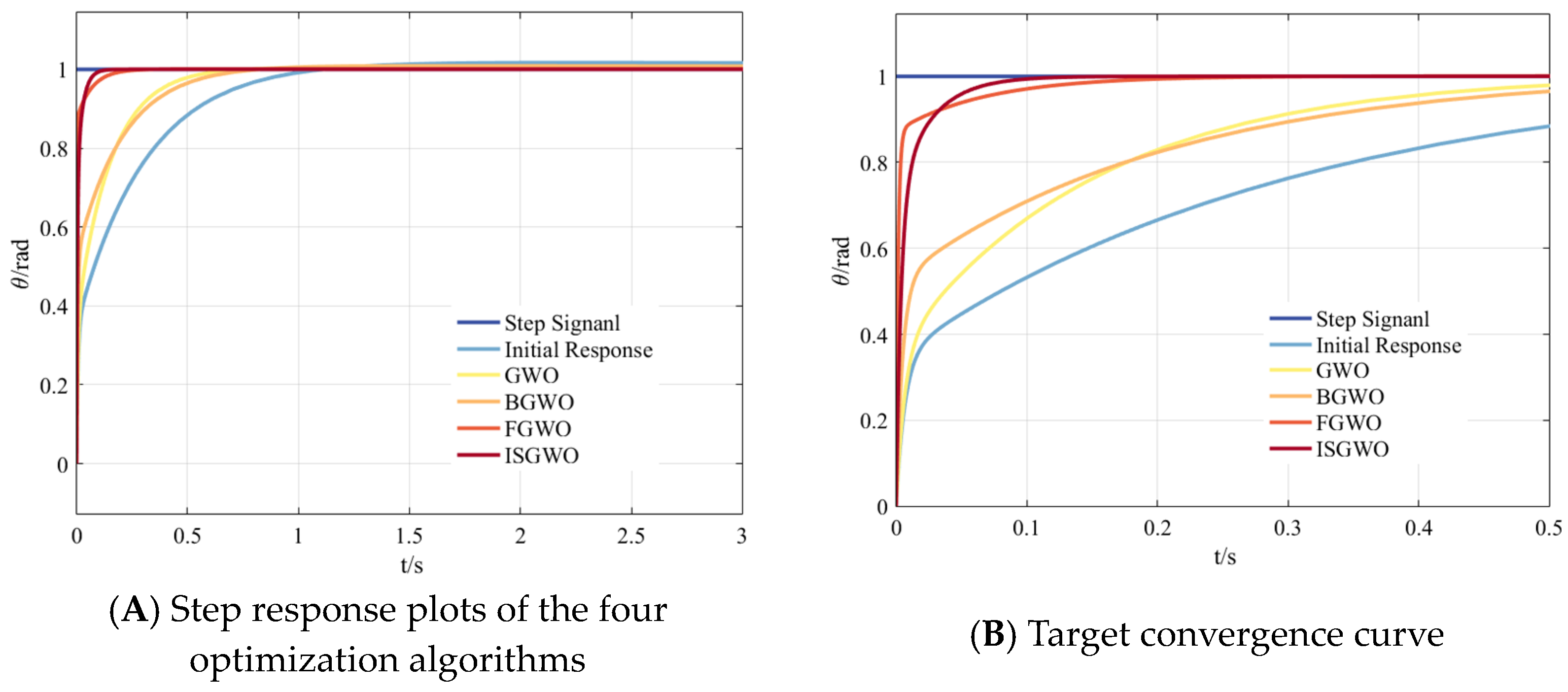
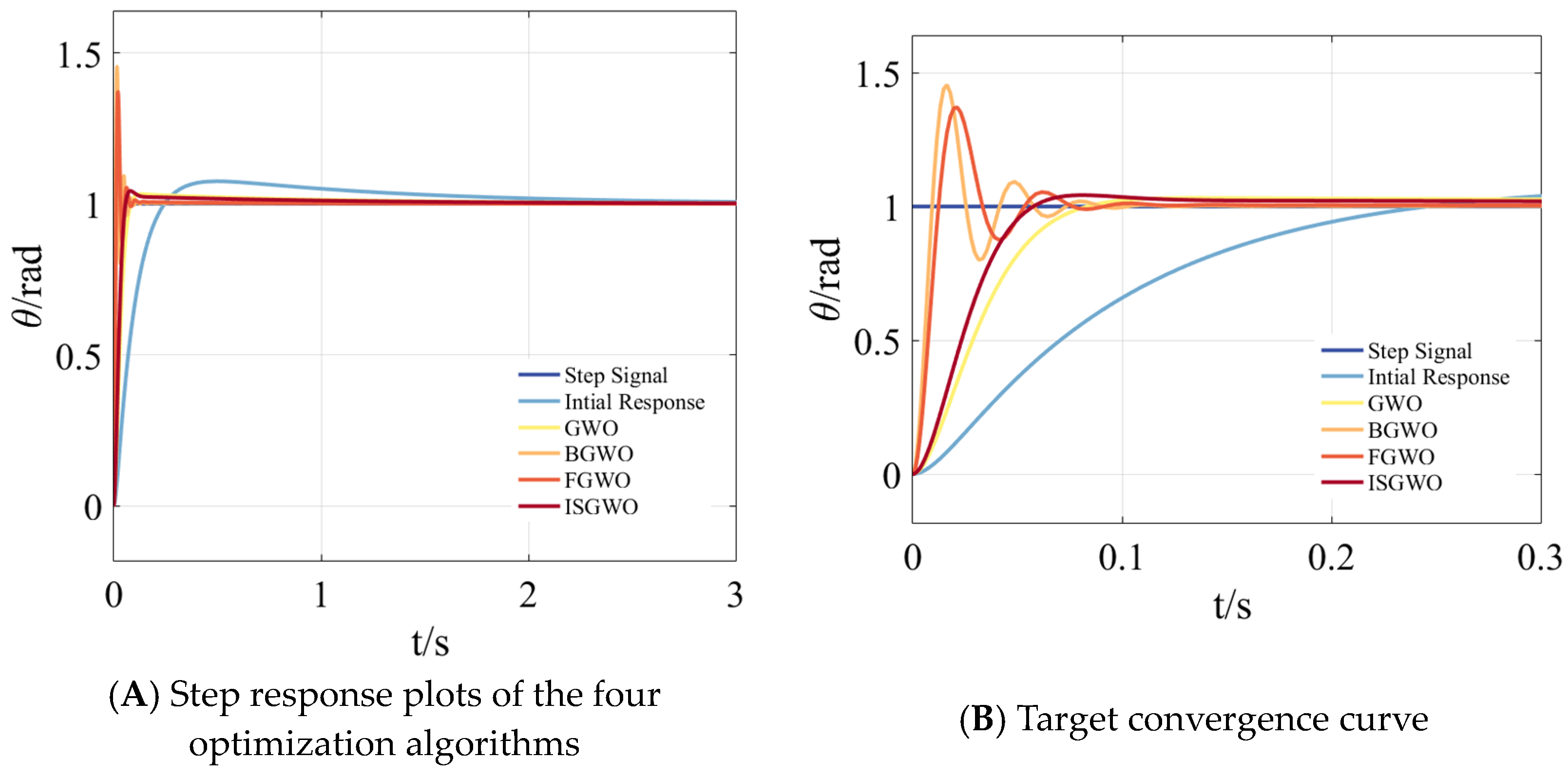
To make the optimization more intuitive, the step response generated based on the optimized parameters is shown in
Figure 9.
In
Figure 9A, comparing the initial response, each optimization algorithm generates a faster step response, FGWO algorithm has a slower initial response rate and ISGWO algorithm performs optimally in all aspects and can better achieve smooth and fast control of the system to meet the optimization requirements.
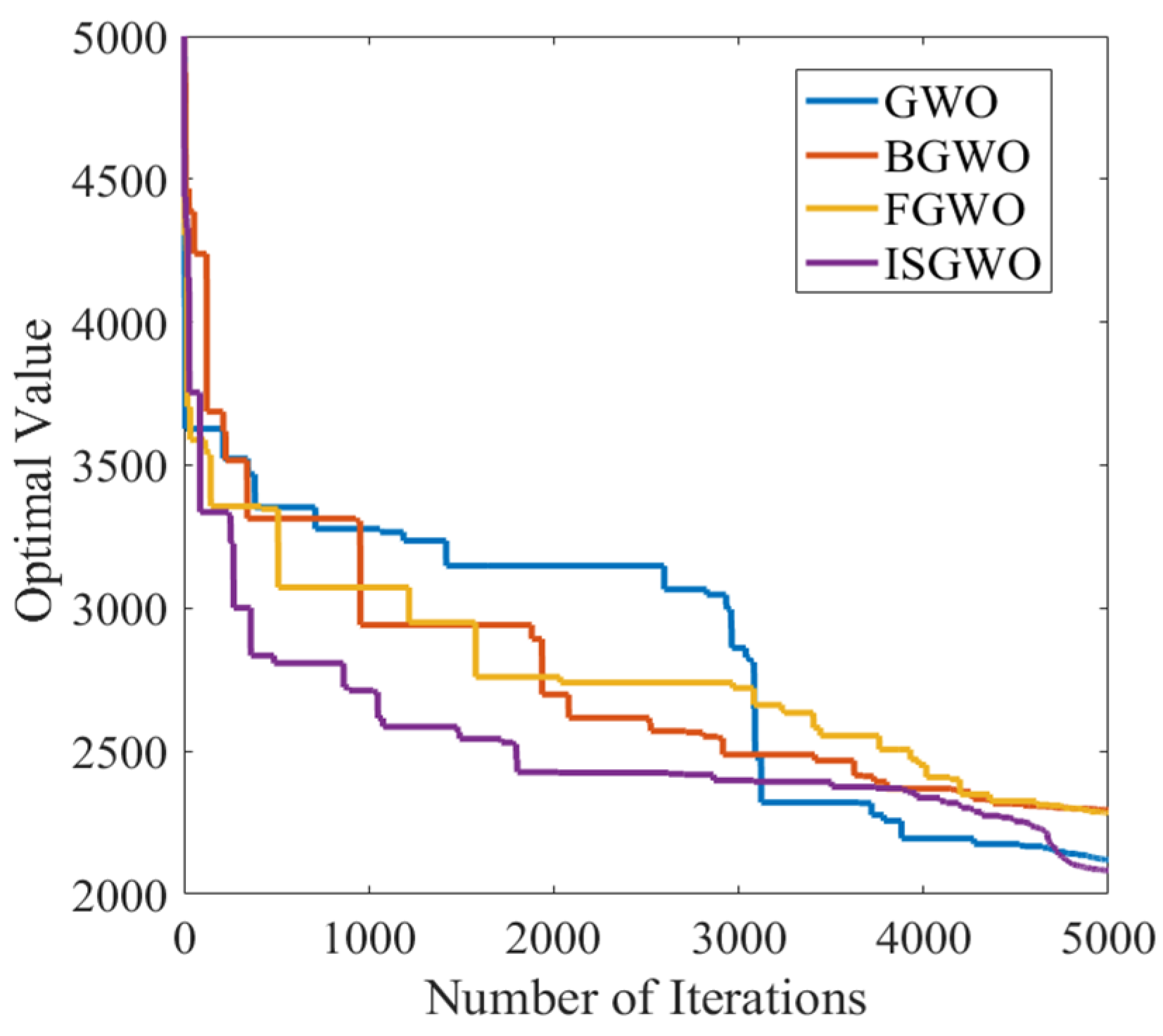
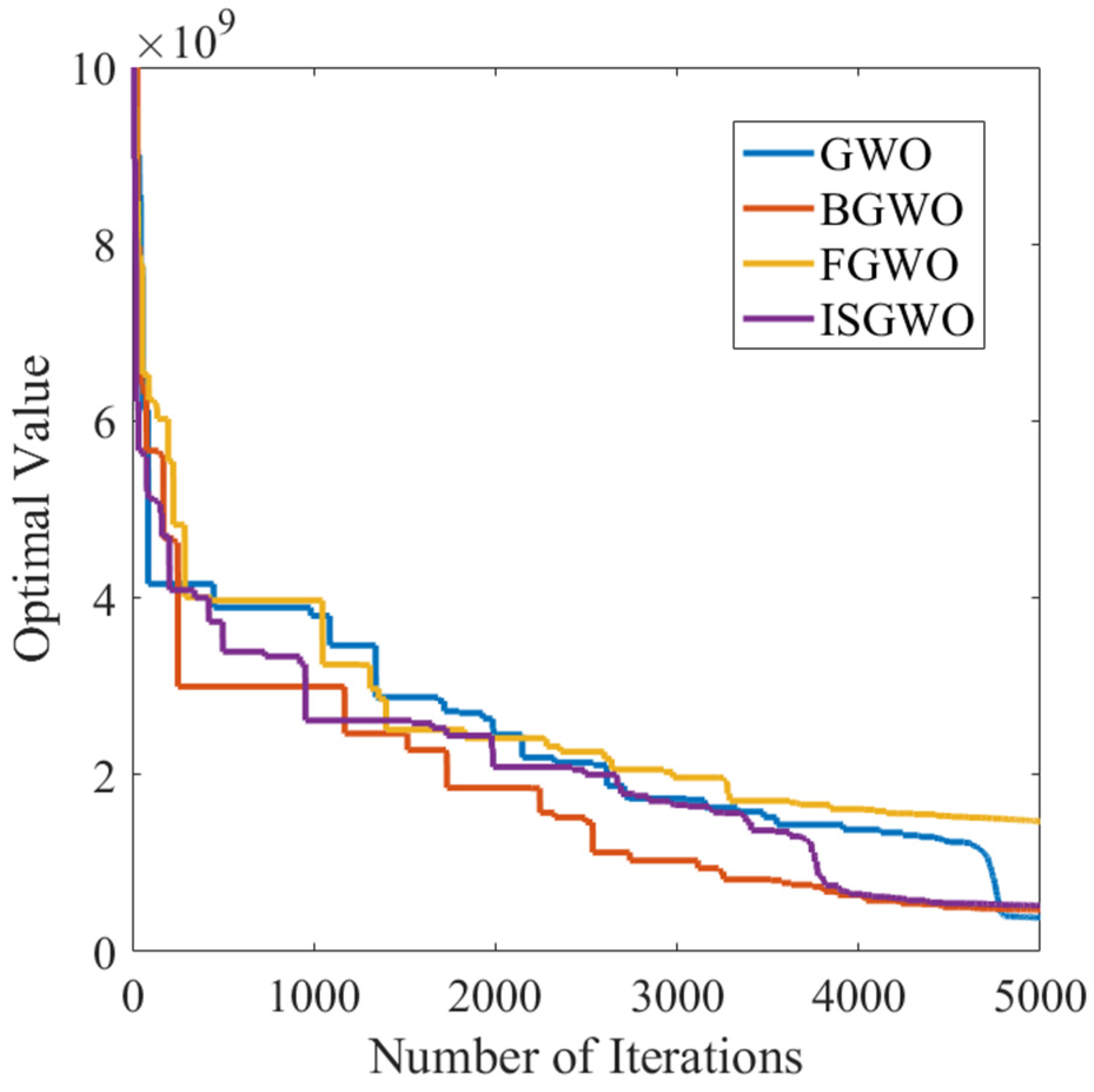
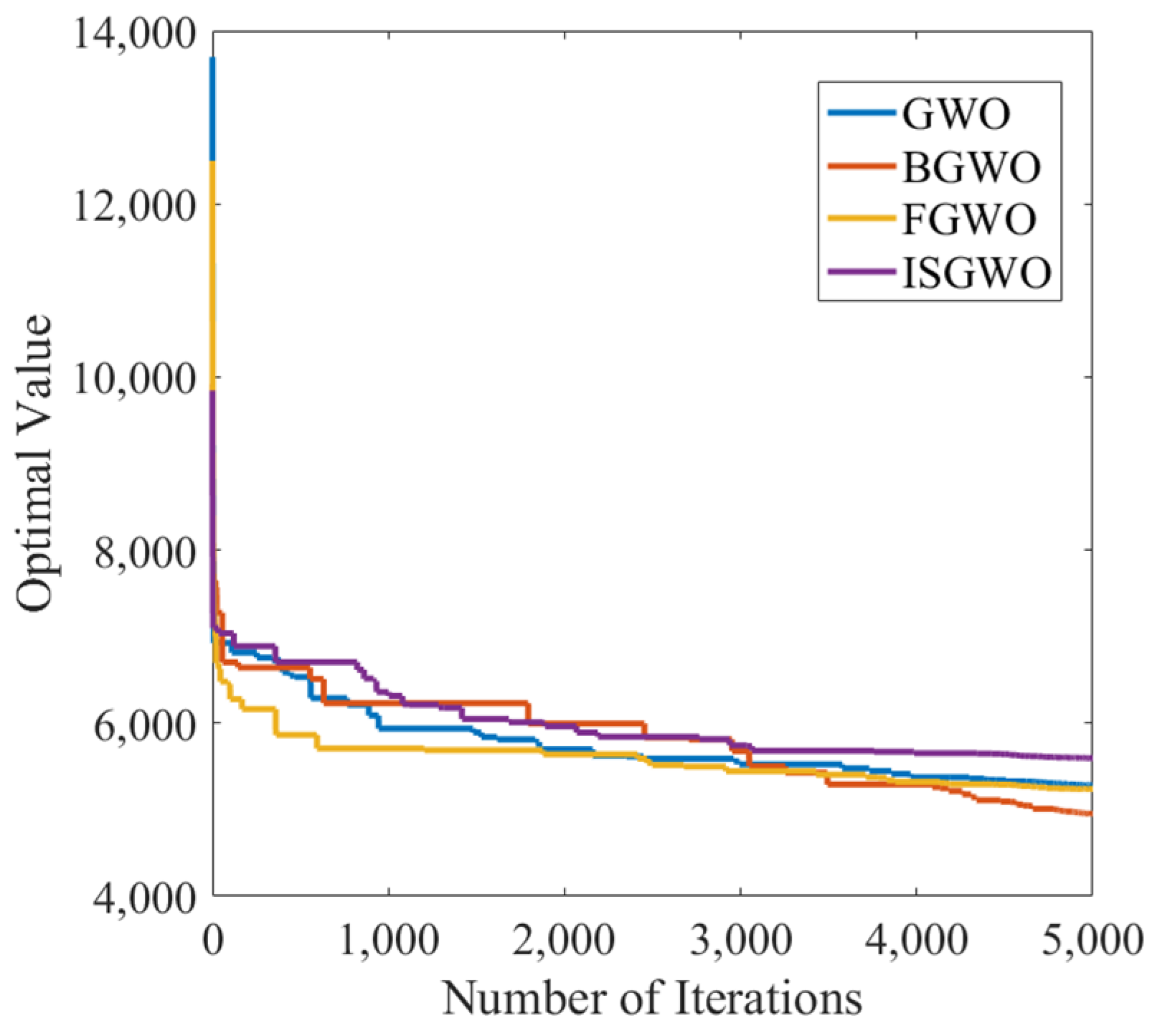
It can be seen from
Figure 10 that the convergence speed of GWO decreases in steps, FGWO can reach convergence faster but with a larger convergence value, BGWO converges slower and has a larger final convergence value. The algorithm in this paper has the fastest convergence speed and the best convergence value.
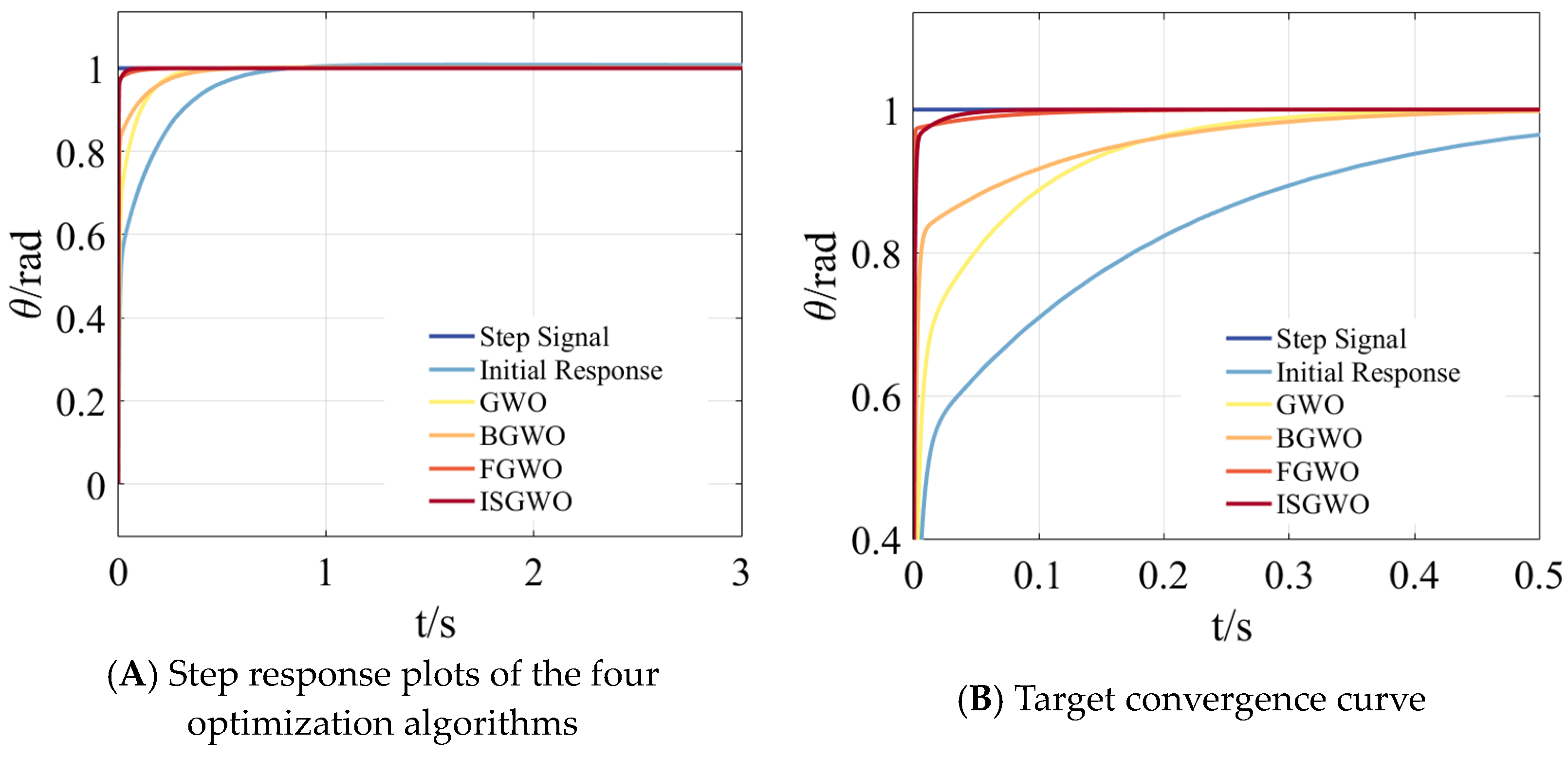
In
Figure 11A, compared with the initial response, each optimization algorithm can produce a faster step response, while the GWO algorithm has a slower initial response speed, FGWO has the fastest response speed, but the convergence speed is slow, and ISGWO can achieve the fastest convergence and meet the optimization requirements.
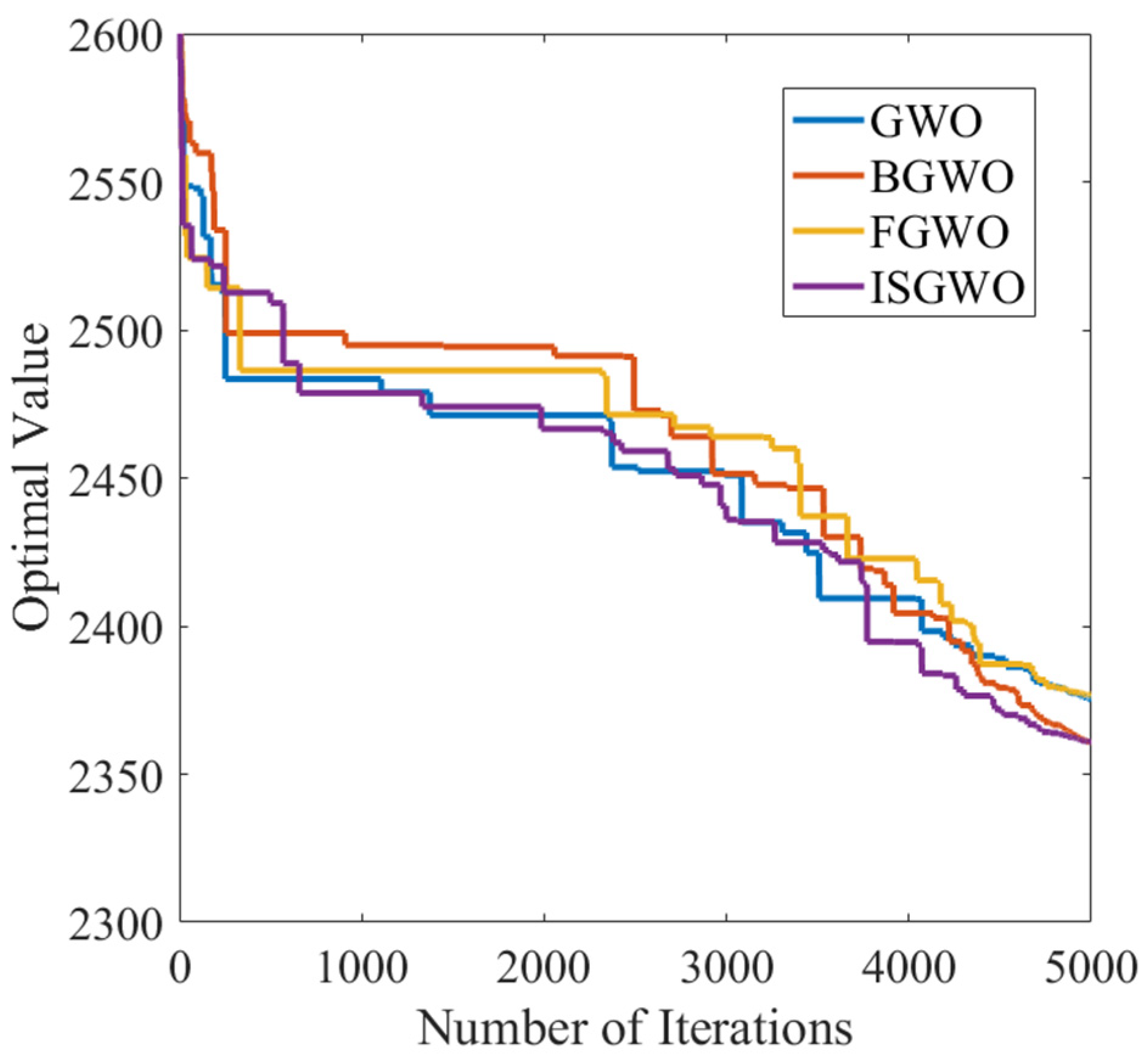
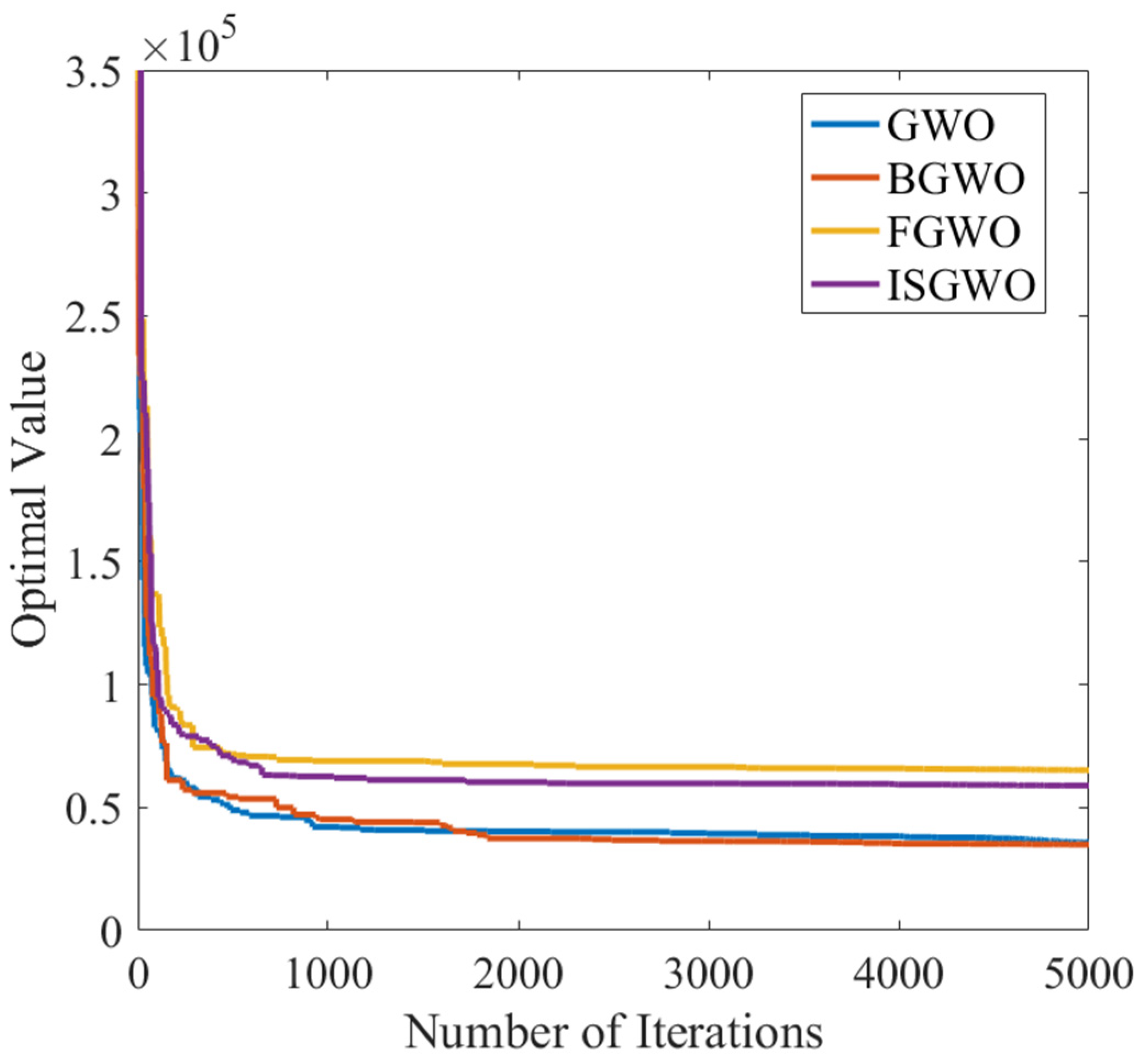
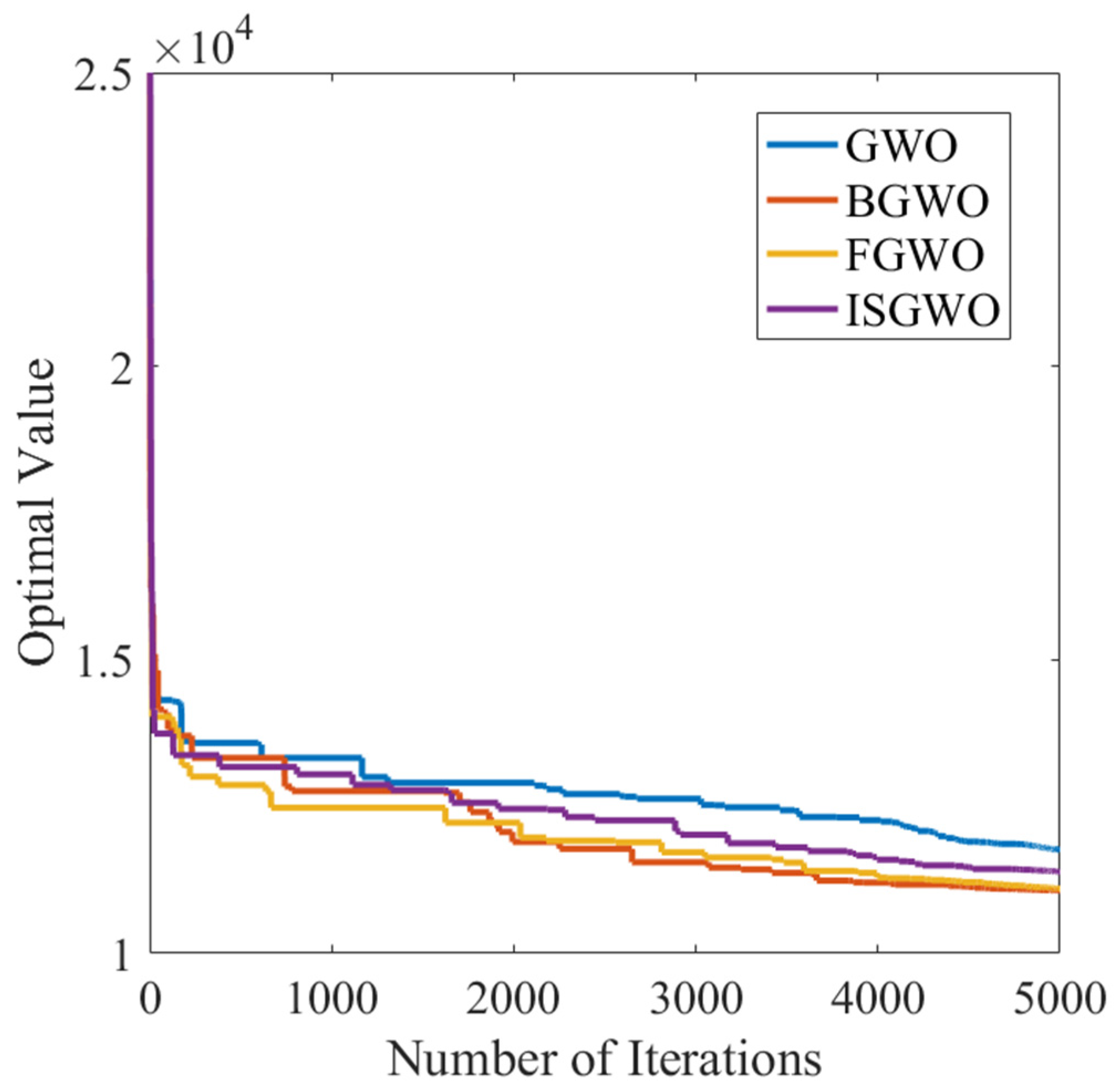
As it can be seen from
Figure 12, GWO has the slowest convergence speed, FGWO can achieve convergence faster, but the convergence value is large, and BGWO has a slower convergence speed, but the final convergence value is small. The algorithm in this paper has the fastest convergence speed.
In
Figure 13A, compared with the initial response, each optimization algorithm can produce a faster step response, while the initial response speed of GWO algorithm is slower but also improved. Although FGWO has the fastest response speed, its curve is not smooth enough, and ISGWO can achieve the fastest convergence and meet the optimization requirements.
As shown in
Figure 14, FGWO can reach convergence faster, while BGWO has a slower convergence speed, but the final convergence value is small. The convergence rate of the algorithm in this paper is the fastest, and although the convergence value is large, it is maintained at a reasonable level.
In
Figure 15, compared with the initial response, each optimization algorithm can produce a faster step response, while the initial response speed of the GWO algorithm is slower, and FGWO has the fastest response speed but larger fluctuation. As shown in
Figure 15B, ISGWO can achieve the fastest convergence and small overshoot, which meets the optimization requirements.
It can be seen from
Figure 16 that GWO has the fastest convergence speed, but the convergence value is larger. FGWO has the slowest convergence speed, but the convergence value is small. The algorithm proposed in this paper has the fastest convergence speed and a smaller final value.
Under the sinusoidal input, the four optimization functions perform 500 iterations of each of the four parameters. The initial parameter values and optimization values are shown in
Table 9.
In order to better verify the superiority of the ISGWO algorithm in parameter optimization, we change the input to a sinusoidal input.
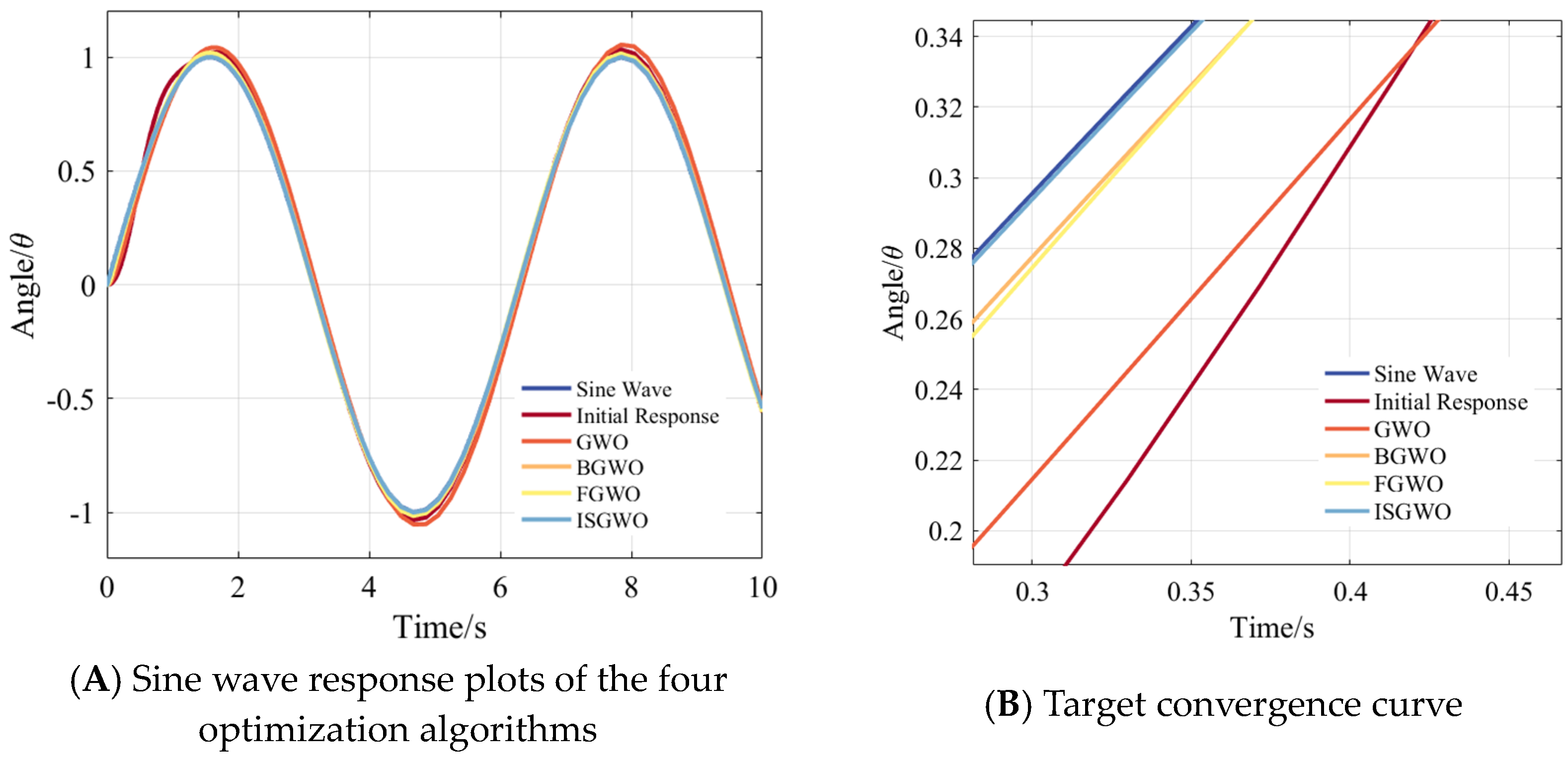
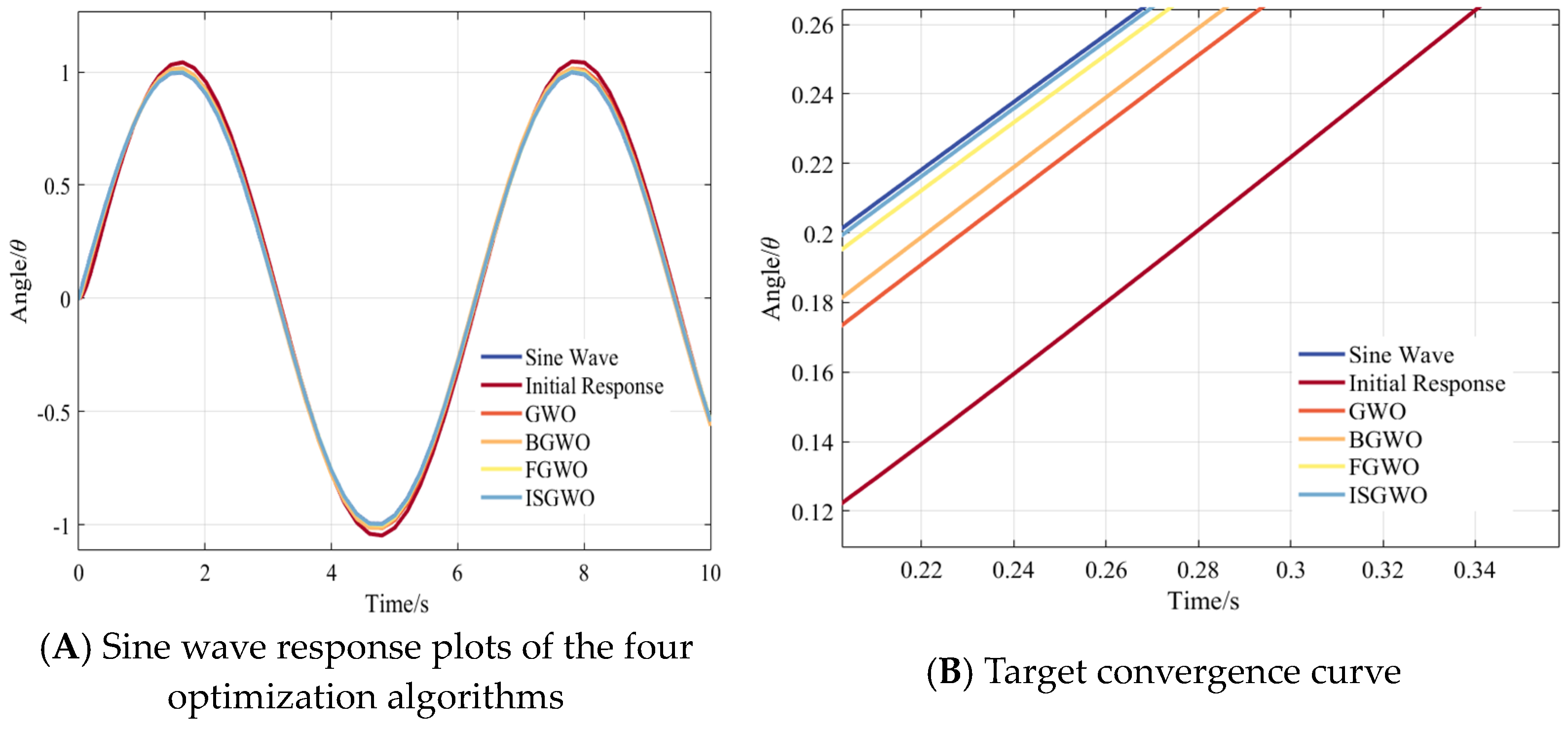
In
Figure 17A, comparing the initial responses, each optimization algorithm tracks the input sinusoidal curve better, the performance of the FGWO algorithm and ISGWO algorithm are not different from each other and the ISGWO algorithm has the smallest stabilization error, which satisfies the optimization requirements.
From
Figure 18, it can be seen that GWO has the fastest convergence speed, but the final convergence value is larger; FGWO can reach convergence faster, but the convergence value is larger. The algorithm in this paper has the smallest final convergence value and can reach a better convergence value in a shorter number of iterations.
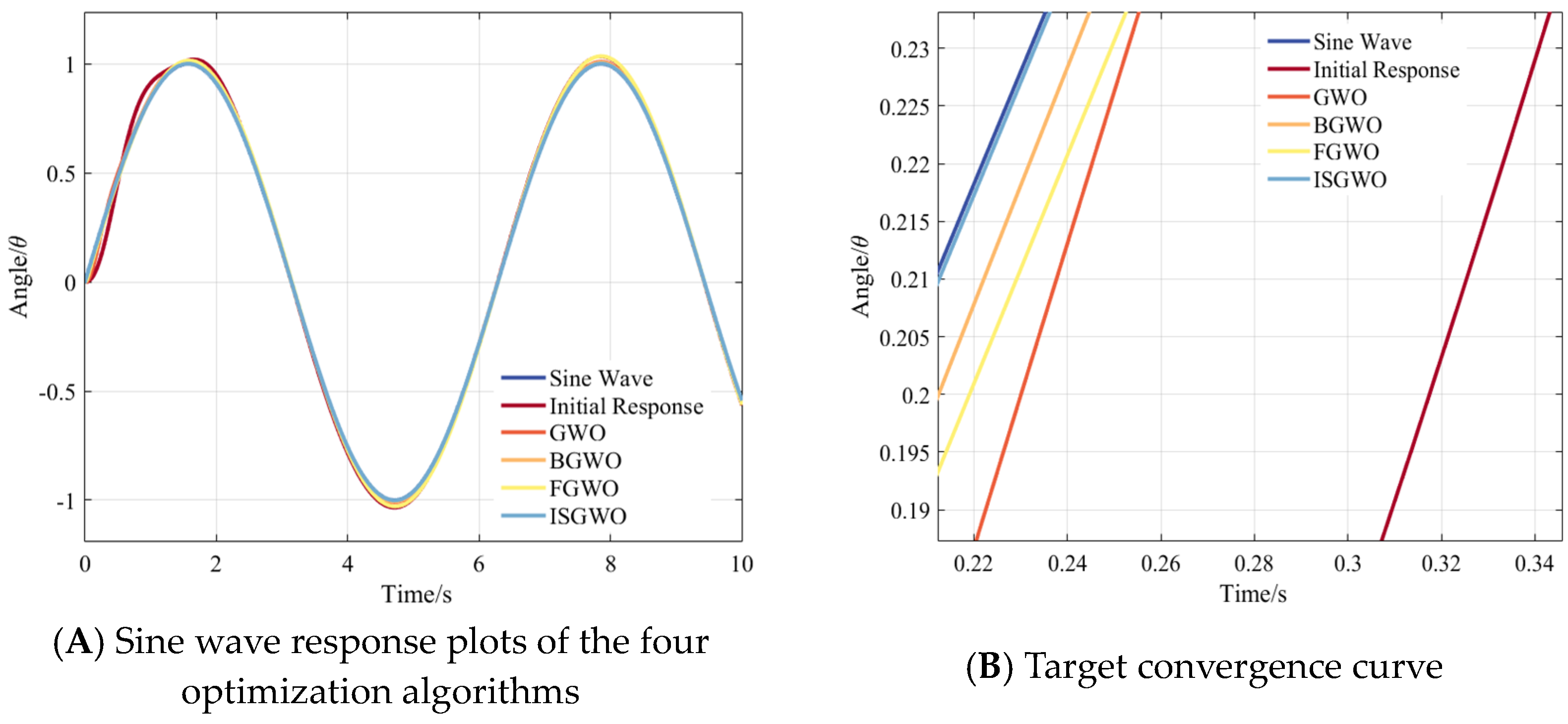
Similarly, we changed the input to a sinusoidal input to strengthen the verification of the superiority of the ISGWO algorithm. In
Figure 19A, the stability error of each optimization algorithm is reduced compared to the initial response, and among them the ISGWO algorithm has the smallest stability error and converges faster to meet the optimization requirements.
From
Figure 20, it can be seen that GWO has the slowest convergence speed and the largest convergence value, and FGWO has a slower convergence speed but a smaller convergence value. The algorithm in this paper not only has the fastest convergence speed, but also the final convergence value is not much different from the minimum convergence value.
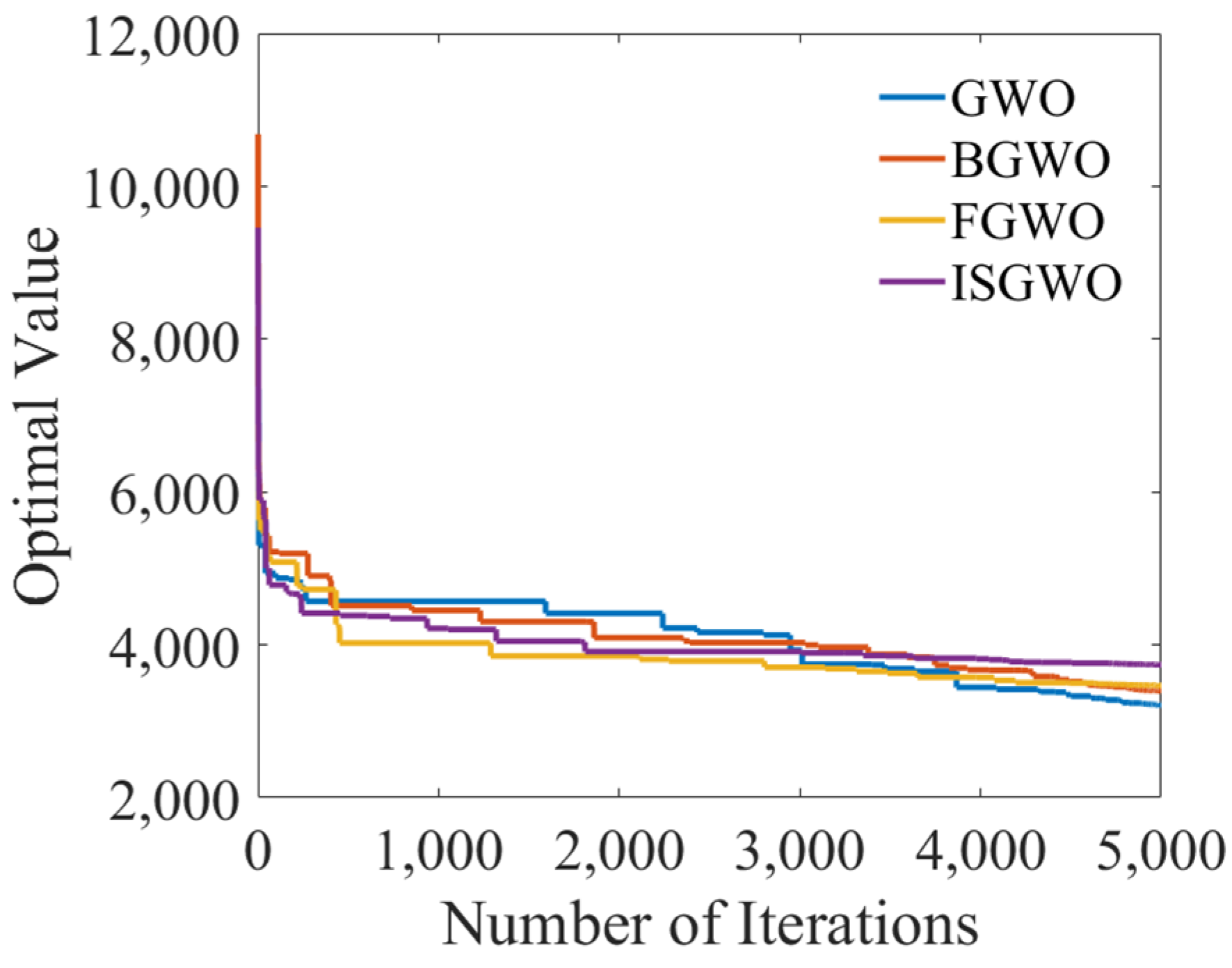
After changing the input to sinusoidal input, we can conclude from
Figure 21A that each optimization algorithm fits the input curve better compared to the initial response, and that the GWO algorithm has a slower but improved initial response. ISGWO can achieve the fastest convergence speed and possesses the smallest stabilization error, which basically fits the input curve exactly and meets the optimization requirements.
As shown in
Figure 22, GWO has the fastest convergence speed, but the late convergence is unstable. While BGWO has slower convergence speed, but the final convergence value is smaller. The algorithm in this paper has the fastest convergence speed, and the convergence value can reach a small level at a smaller number of iterations.
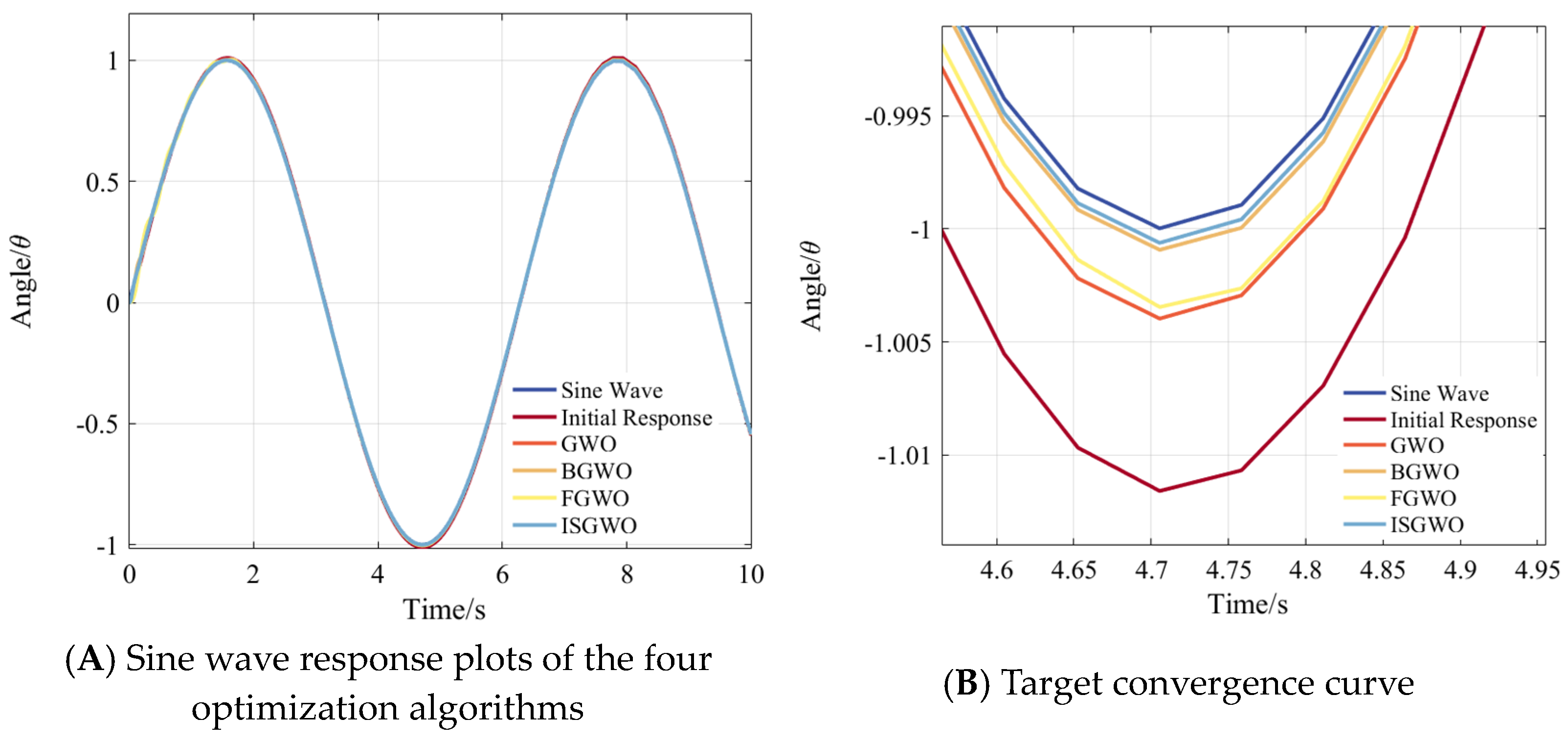
After replacing the input with sinusoidal input, from
Figure 23A we can see that each optimization algorithm tracks the input curve better compared to the initial response. the GWO algorithm fluctuates more and the stabilization error of BGWO is larger. As shown in
Figure 23B, ISGWO has the smallest stabilization error and less fluctuation, which satisfies the optimization requirements.
From
Figure 24, it can be seen that GWO has the slowest convergence speed, but the final convergence value is smaller, and FGWO has the slowest convergence speed, but the convergence value is smaller. The algorithm proposed in this paper has the fastest convergence speed, and although the final convergence value is larger, a more objective convergence value can be achieved at a smaller number of convergence times. Combining the performance of different types, the algorithm in this paper converges faster, is not easy to fall into the local optimum, and can find the control parameters with better control effect in the complex control environment.
6. Conclusions
For the problem of optimizing the synchronous control parameters of permanent magnet synchronous motors, we propose an improved sinusoidal optimization Gray Wolf algorithm. In the algorithm design, we introduce a position-update formula based on the improved sinusoidal to balance the exploratory and exploitative abilities of the algorithm in the process of finding the optimal solution. Meanwhile, to prevent the population individuals from crossing the boundary during the optimization process, we adopt a particle-crossing processing strategy based on the symmetry idea, which can update the position of the crossing individuals in time and retain the position information of the optimal individuals to maximize the retention of the current optimal solution, to improve the convergence speed of the algorithm to the optimal solution. Finally, we use the differential cross-perturbation strategy to move the three gray wolf individuals with the worst fitness out of the local optimal position to help the algorithm jump out of the local optimal position, to improve the search accuracy of the algorithm.
To evaluate the performance and effectiveness of the algorithm, ISGWO was tested against three gray wolf-related algorithms such as GWO, BGWO and FGWO with the help of CEC2017 benchmark test functions on the ISGWO, and the experimental results show that ISGWO maintains the leading level in search accuracy, algorithmic performance as well as search speed, and achieves several balances. The algorithm is applied to the parameter optimization problem of synchronous control, and the same three algorithms are selected for comparison. The experimental results show that ISGWO can find the smallest cost function value as well as the optimal parameter value the fastest under the same environment, thus proving the effectiveness and significance of the ISGWO algorithm in the synchronous control parameter optimization problem.
Although ISGWO has made some contributions to the problem of algorithm design and control parameter optimization, there are some limitations. Although high convergence accuracy and short computation time can be guaranteed at the same time in the control parameter optimization in this paper, the algorithm is not universal enough for different types of functions.
In future work, we will try to optimize multiple parameters or multiple function indicators simultaneously. This places higher demands on the optimization algorithm and requires optimization of its process to improve convergence accuracy and computation time.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}