
Photovoltaic Fuzzy Logical Control MPPT Based on Adaptive Genetic Simulated Annealing Algorithm-Optimized BP Neural Network

Abstract
:1. Introduction
2. Modelling of PV Power Generation System
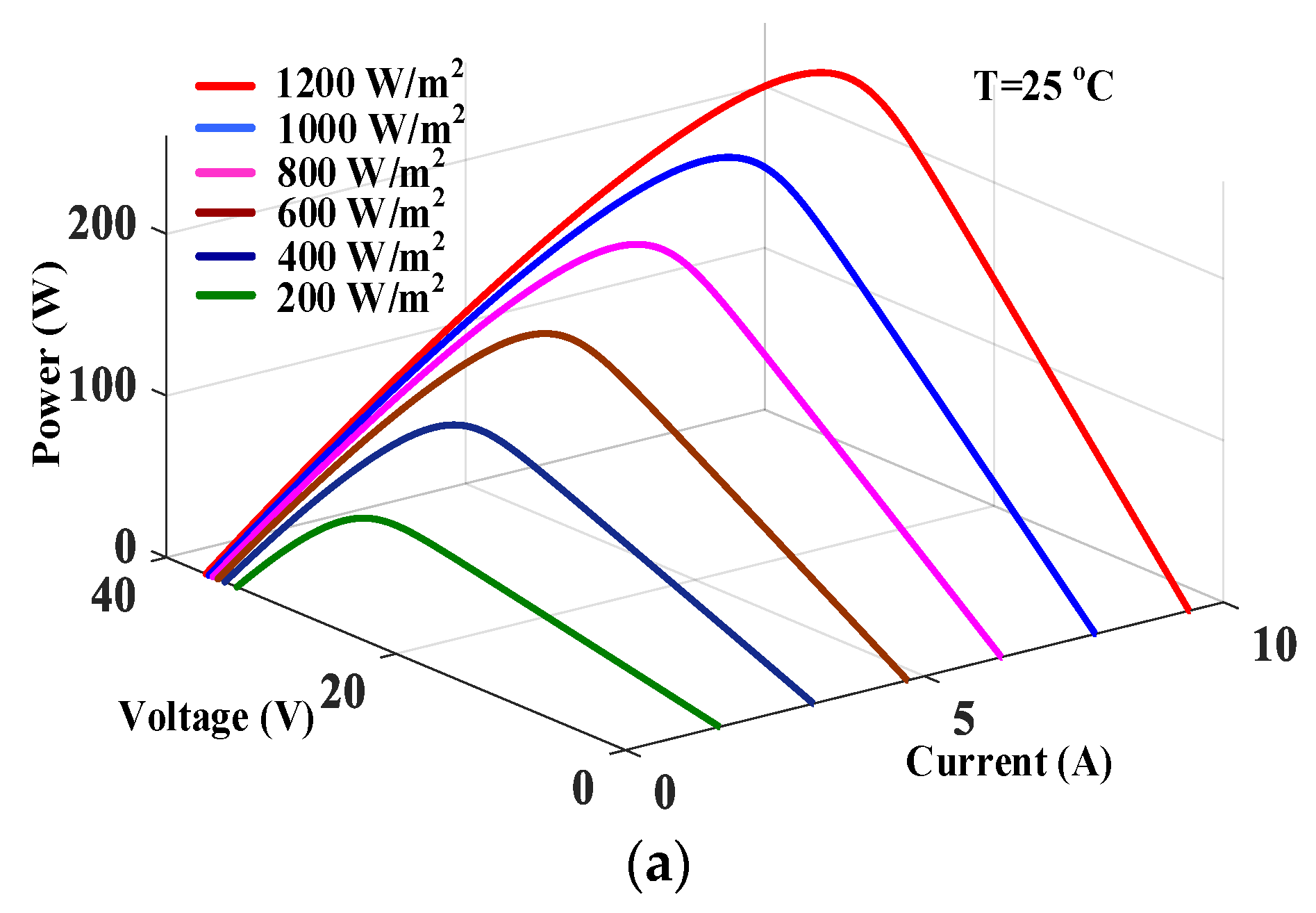
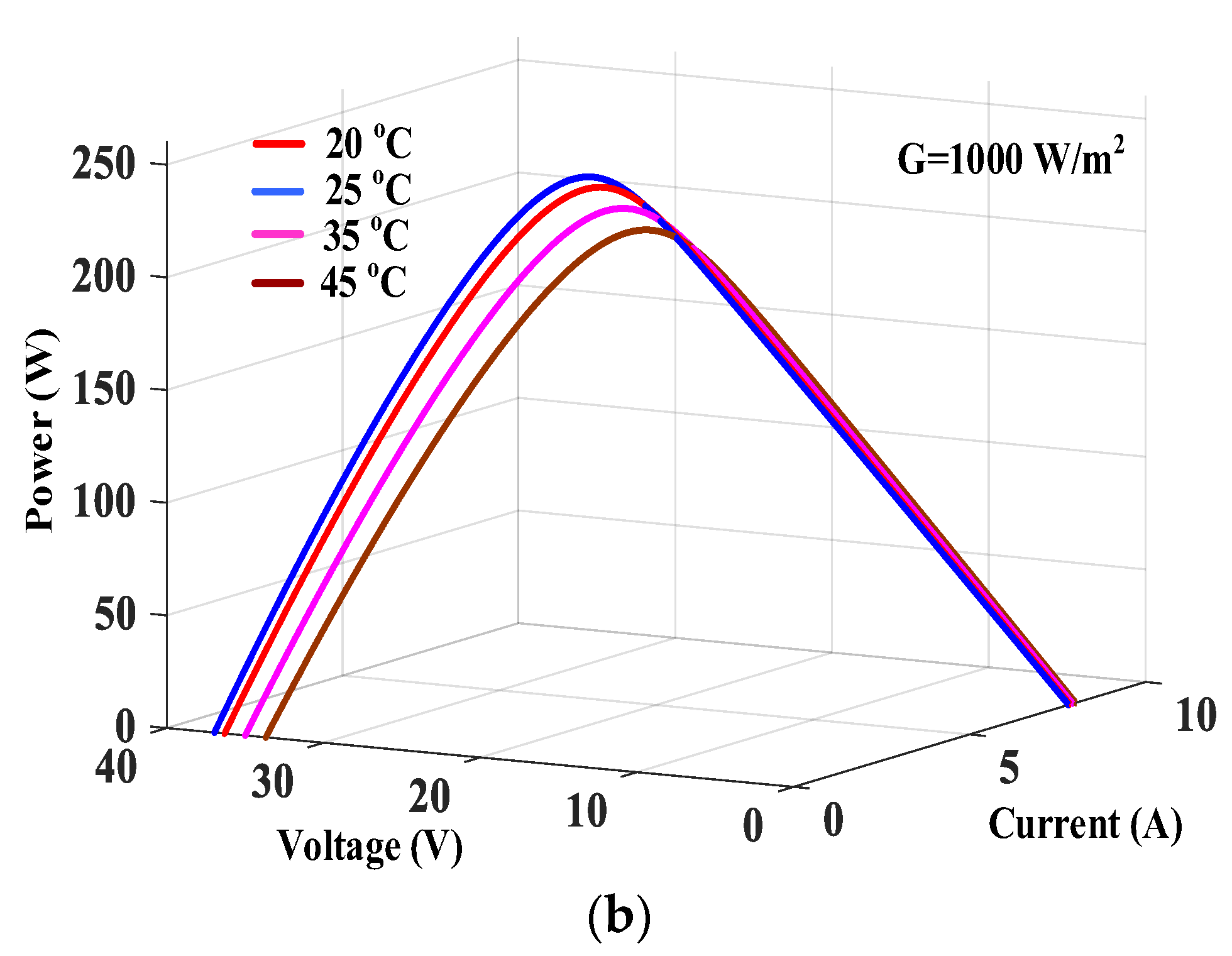
2.1. Mathematical Model of PV Cell
2.2. Mathematical Model of Boost Converter
3. Related Works
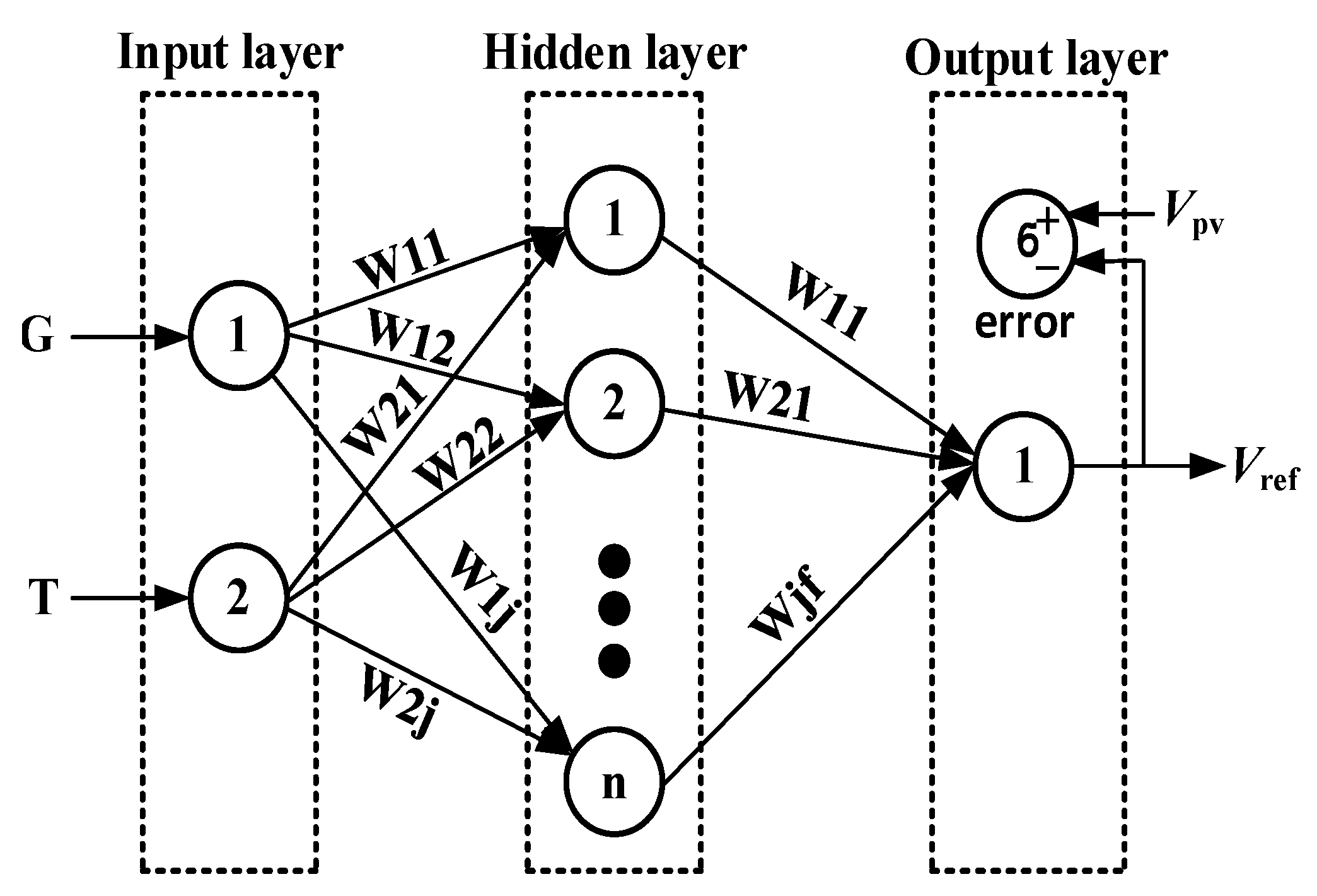
3.1. Artificial Neural Network (ANN)
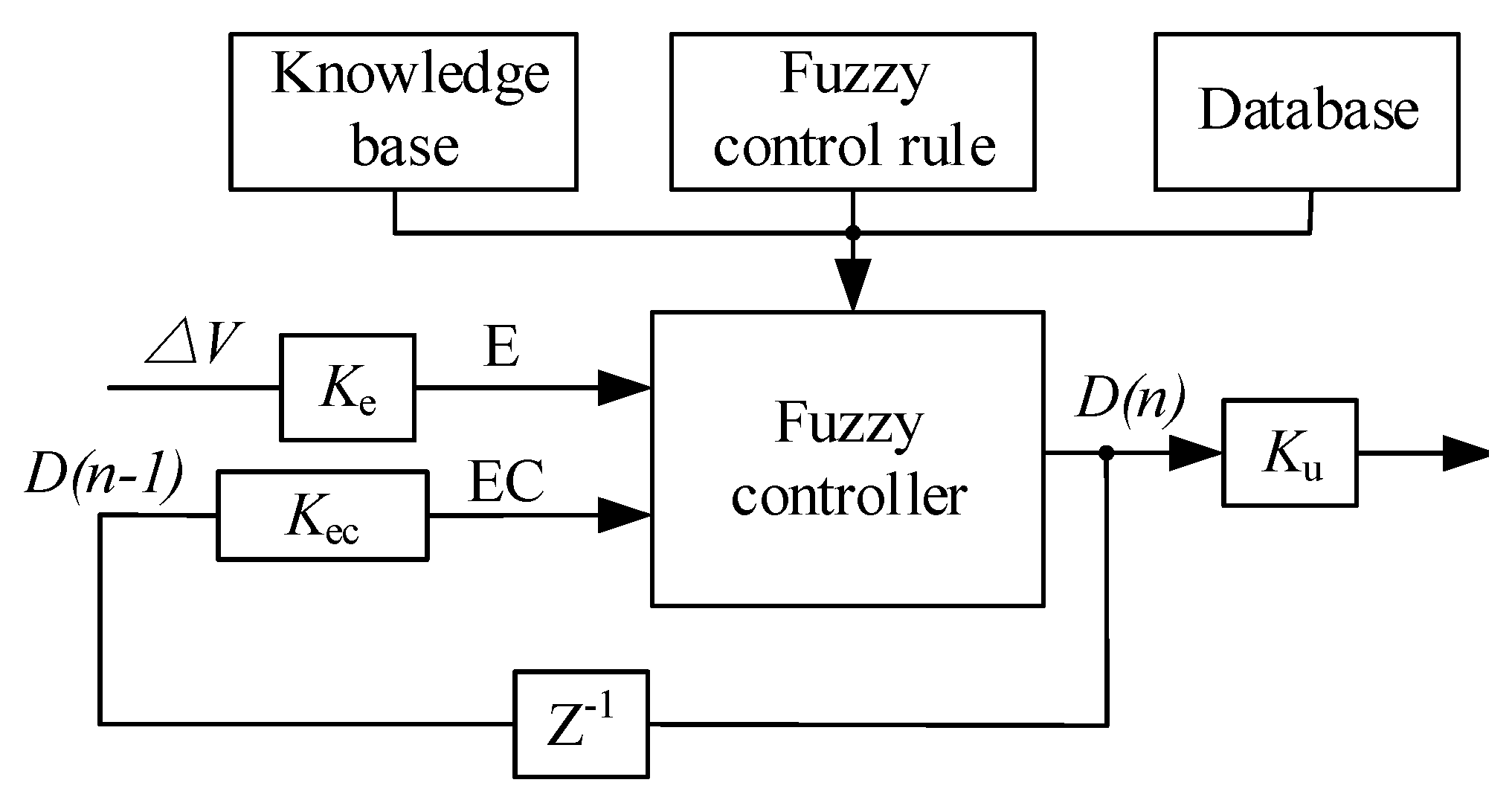
3.2. Fuzzy Logical Control (FLC)
3.3. Adaptive GA and SA Algorithm
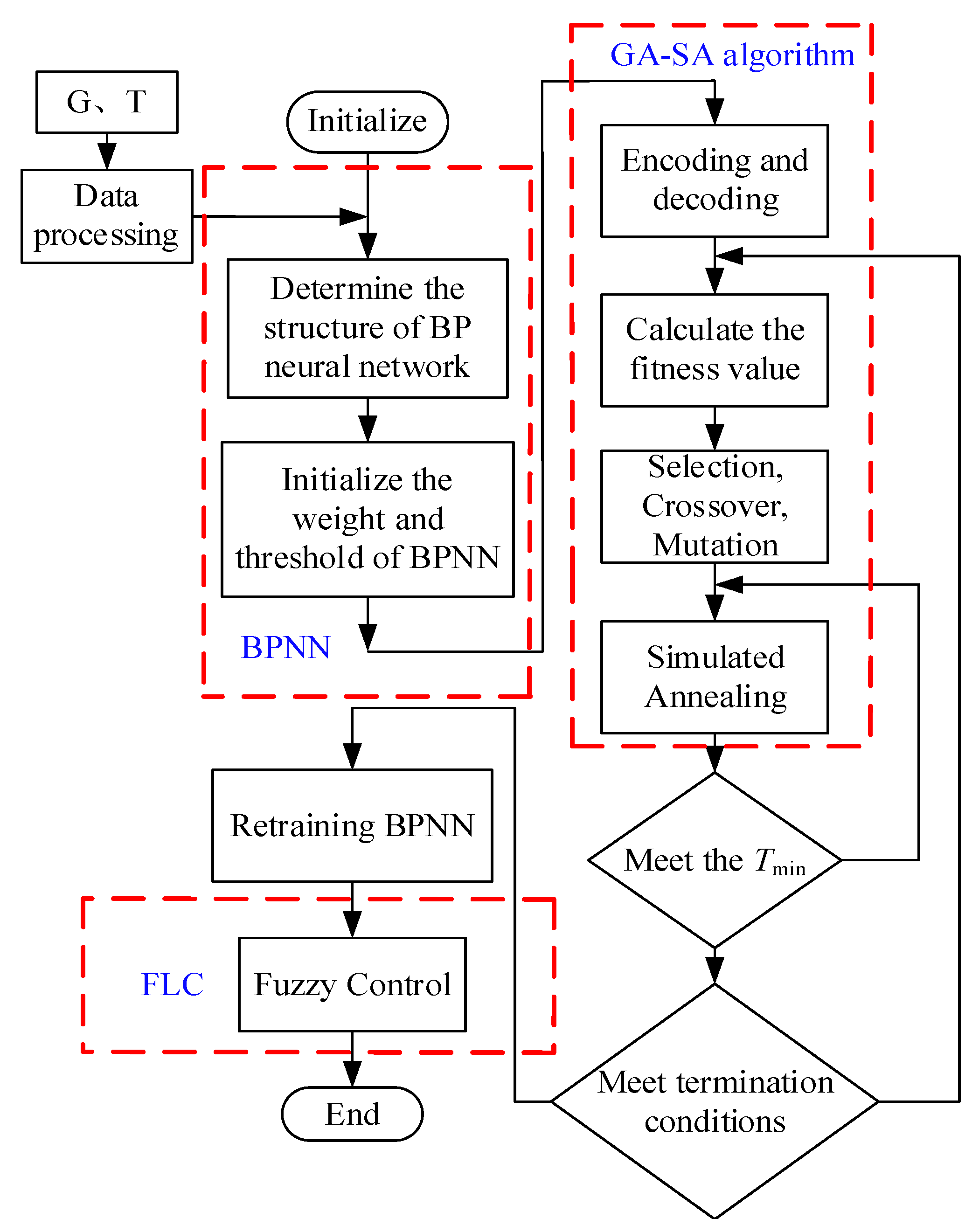
3.4. AGSA–BPNN–FLC Algorithm
- Confirm the BPNN structure and initialize parameters, such as population size nPop, maximum evolutionary generation Itmax, crossover probability Pc, variation probability Pm, initial annealing temperature T0, temperature attenuation coefficient k, maximum annealing number T_It and Markov chain length L.
- The selection, crossover and mutation operations are carried out to generate the offspring populations, where the crossover and mutation probability are calculated according to Equations (5)–(7).
- The SA algorithm is adopted for individuals with high fitness value. According to the Equations (8) and (9), the deterioration solution is received with a certain probability p. If the real-time probability is greater than the reception probability p, the new solution is completely received; otherwise, the new solution is received with probability p.
- Determine whether the current temperature T is less than the final temperature Tmin. If T < Tmin, the algorithm ends; otherwise, return to step (3) to execute the SA algorithm.
- Judge whether the current iteration number It satisfies the maximum evolution algebra Itmax. If It < Itmax, then It = It + 1; otherwise, return to step (2).
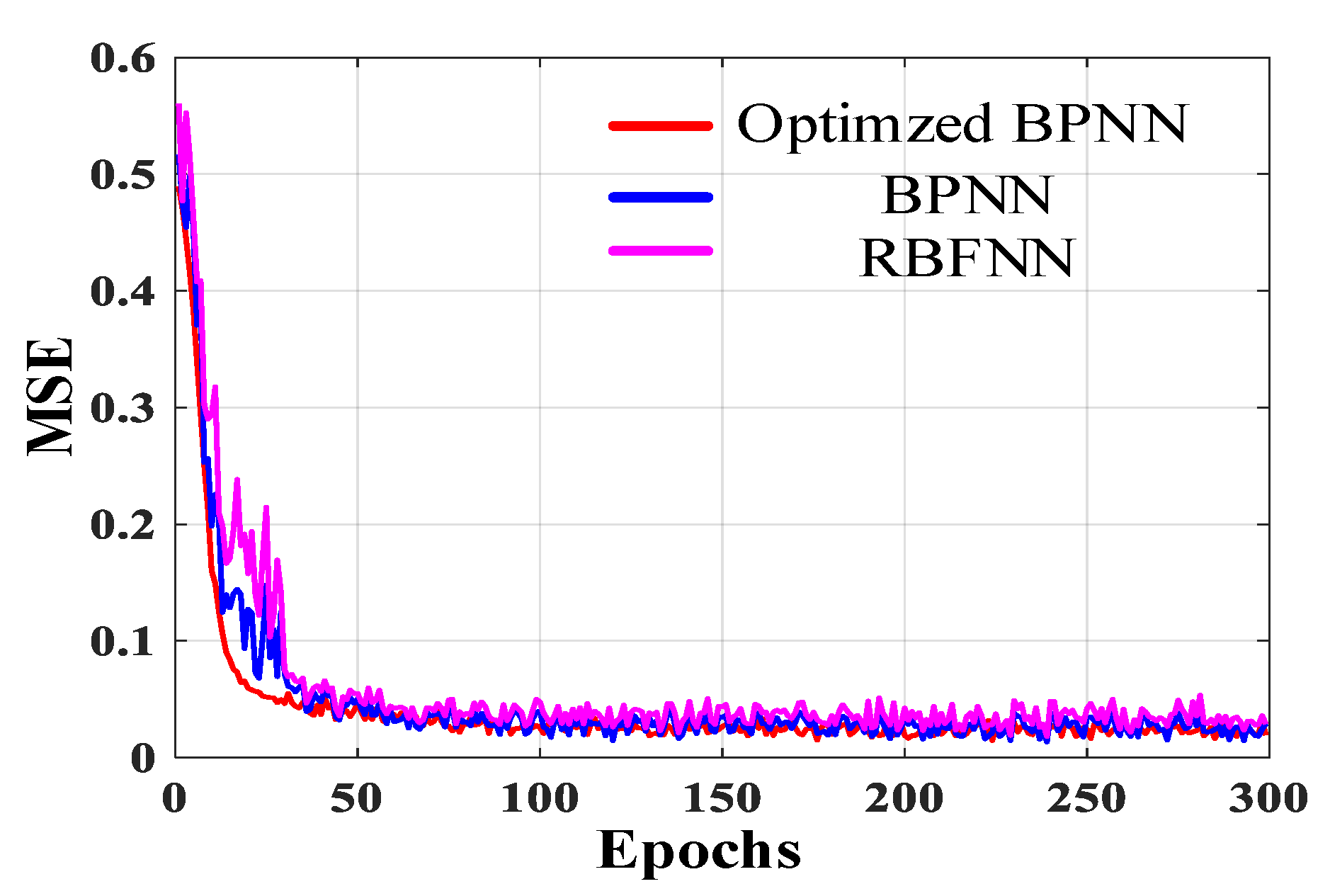
- The optimized BPNN is used to predict the MPP voltage (Vref).
- The voltage deviation ∆V = Vpv − Vref and D (n − 1) are employed as the inputs of FLC to obtain the duty ratio D (n) of the boost converter. Figure 10 shows the best performance curve of the optimized BPNN.
4. Simulation Results and Discussion
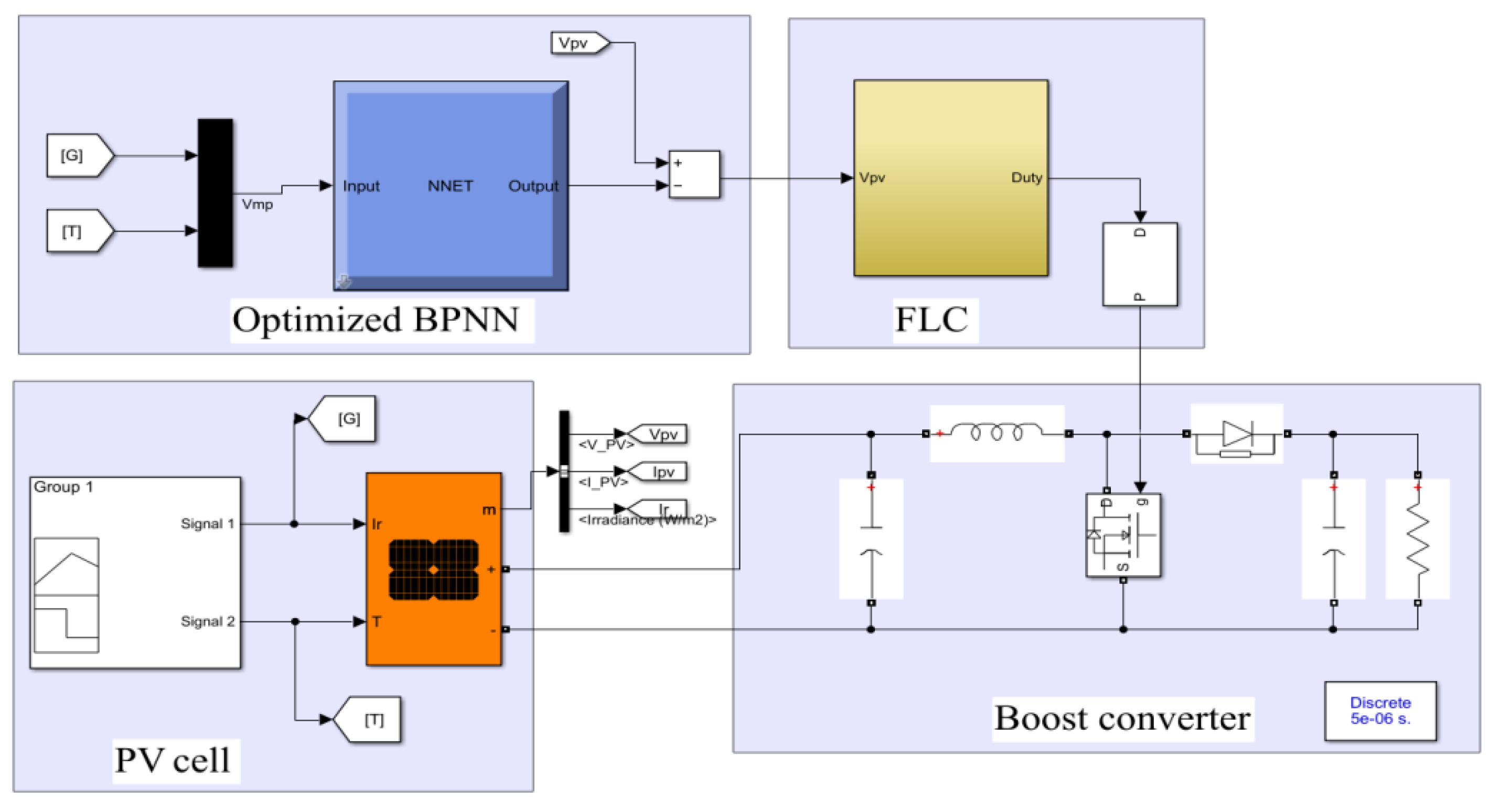
4.1. Datasets and Simulation Model
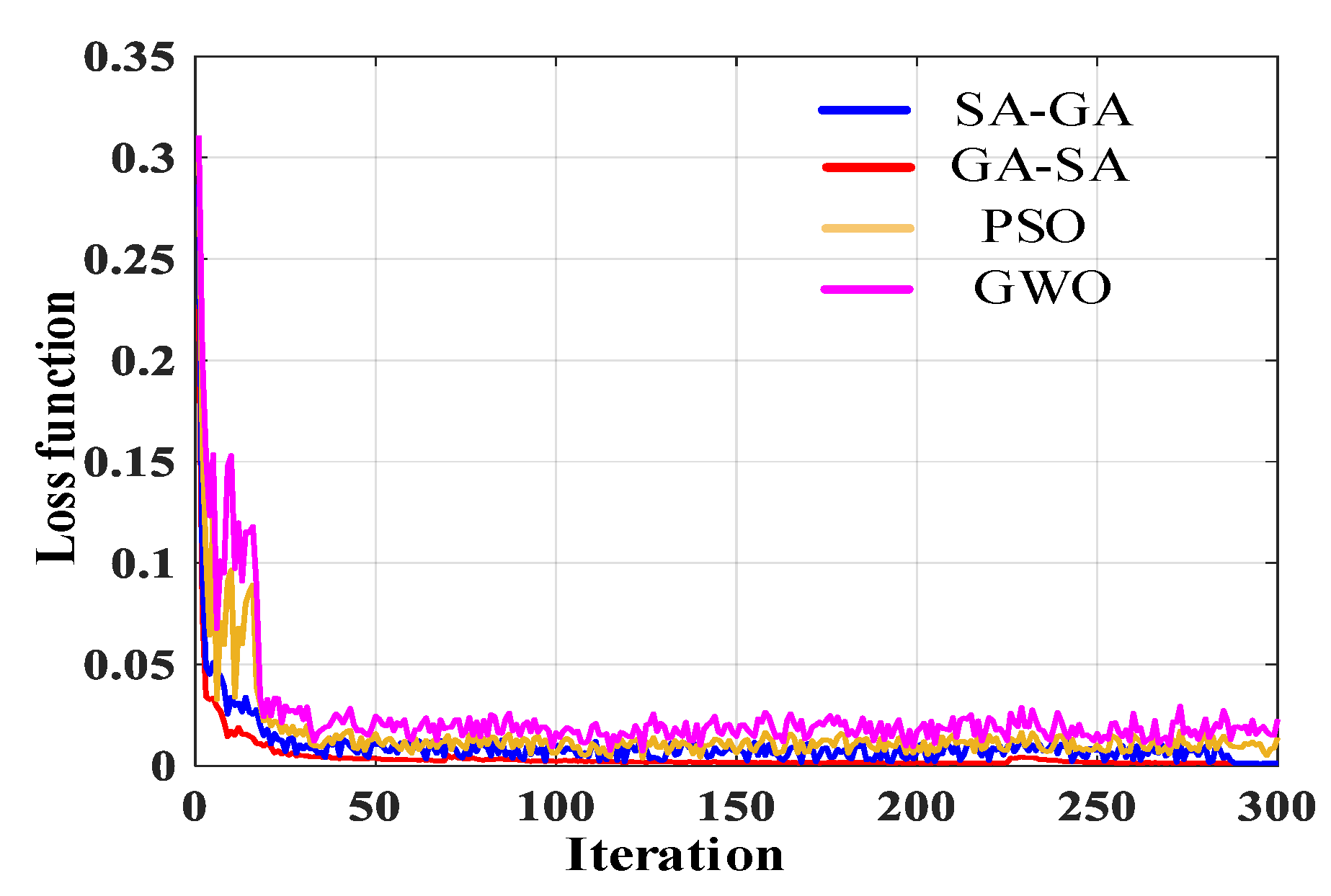
4.2. Optimized Results
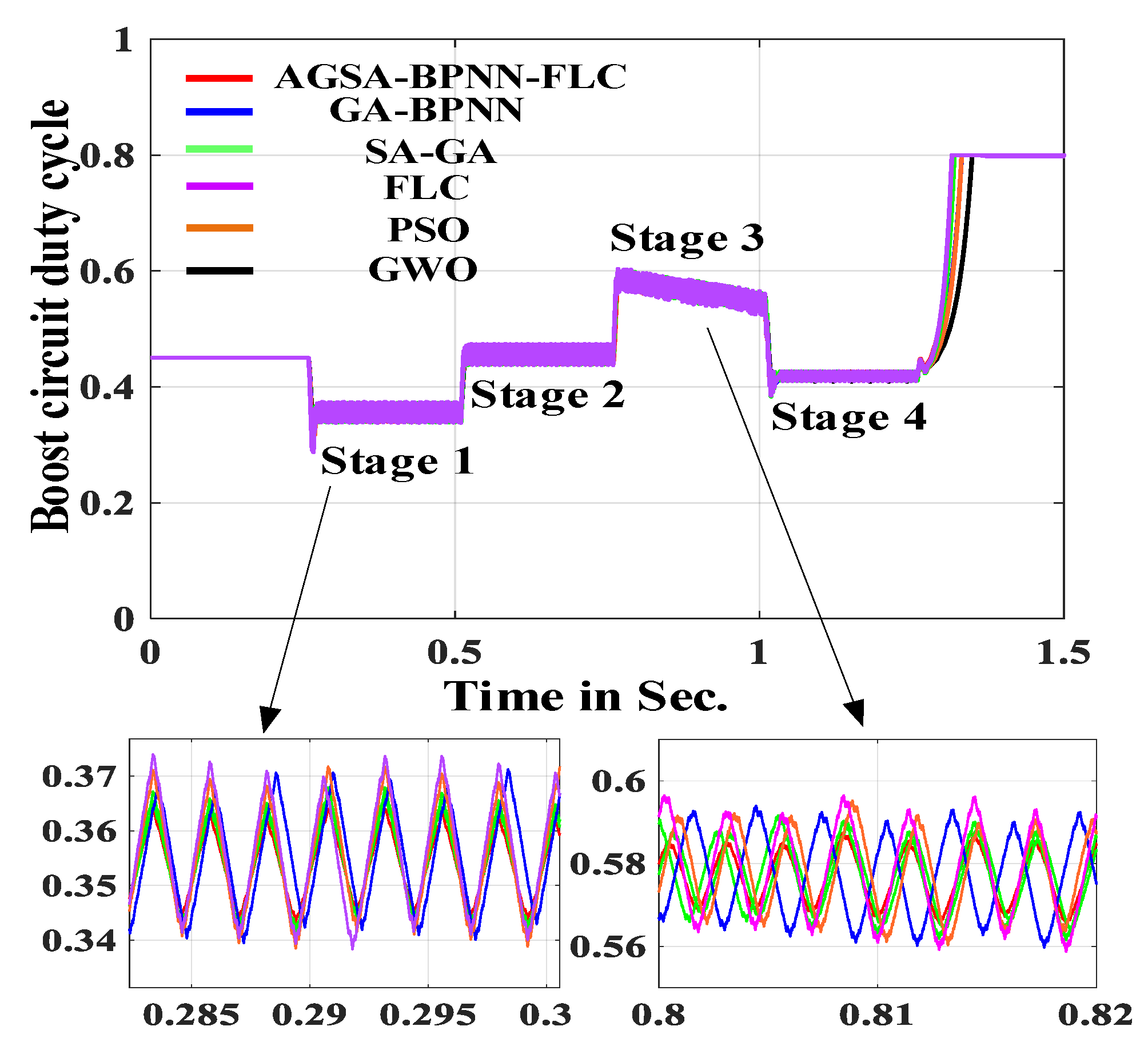
4.3. Simulation Results
5. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rabaia, M.K.H.; Abdelkareem, M.A.; Sayed, E.T.; Elsaid, K.; Chae, K.J.; Wilberforce, T.; Olabi, A.G. Environmental impacts of solar energy systems: A review. Sci. Total Environ. 2021, 754, 141989. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Hu, W.; Liu, Y. A novel smooth switching control strategy for multiple photovoltaic converters in DC microgrids. J. Power Electron. 2022, 22, 163–175. [Google Scholar] [CrossRef]
- Pandiyan, P.; Saravanan, S.; Prabaharan, N.; Tiwari, R.; Chinnadurai, T.; Babu, N.R.; Hossain, E. Implementation of different MPPT techniques in solar PV tree under partial shading conditions. Sustainability 2021, 13, 7208. [Google Scholar] [CrossRef]
- Çelik, Ö.; Zor, K.; Tan, A.; Teke, A. A novel gene expression programming-based MPPT technique for PV micro-inverter applications under fast-changing atmospheric conditions. Sol. Energy 2022, 239, 268–282. [Google Scholar] [CrossRef]
- Chiu, C.S.; Ngo, S. A Novel Algorithm-based MPPT Strategy for PV power systems under partial shading conditions. Elektron. Elektrotech. 2022, 28, 42–51. [Google Scholar] [CrossRef]
- Shukl, P.; Singh, B. Proficient operation of grid interfaced solar PV system for power quality improvement during adverse grid conditions. IET Gener. Transm. Dis. 2020, 14, 6330–6337. [Google Scholar] [CrossRef]
- Babes, B.; Boutaghane, A.; Hamouda, N. A novel nature-inspired maximum power point tracking controller based on ACO-ANN algorithm for photovoltaic system fed arc welding machines. Neural Comput. Appl. 2021, 16, 1–19. [Google Scholar] [CrossRef]
- Yousri, D.; Abd-Elaziz, M.; Mirjalili, S. Fractional-order calculus-based flower pollination algorithm with local search for global optimization and image segmentation. Knowl. Based Syst. 2020, 197, 105889–105925. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Y.G.; Burrage, K.; Tian, Y.C.; Lawson, B.; Ding, Z. An improved firefly algorithm for global continuous optimization problems. Expert Syst. Appl. 2020, 149, 113340–113368. [Google Scholar] [CrossRef]
- Celikel, R.; Yilmaz, M.; Gundogdu, A. A voltage scanning-based MPPT method for PV power systems under complex partial shading conditions. Renew. Energy 2022, 184, 361–373. [Google Scholar] [CrossRef]
- Motahhir, S.; El-Hammoumi, A.; El-Ghzizal, A. Photovoltaic system with quantitative comparative between an improved MPPT and existing INC and P&O methods under fast varying of solar irradiance. Energy Rep. 2018, 4, 341–350. [Google Scholar]
- Kumar, K.; Babu, N.R.; Prabhu, K.R. Design and analysis of RBFN-based single MPPT controller for hybrid solar and wind energy system. IEEE Access 2017, 5, 15308–15317. [Google Scholar] [CrossRef]
- Feroz-Mirza, A.; Mansoor, M.; Ling, Q.; Khan, M.I.; Aldossary, O.M. Advanced variable step size incremental conductance MPPT for a standalone PV system utilizing a GA-tuned PID controller. Energies 2020, 13, 4153. [Google Scholar] [CrossRef]
- Saha, S.; Cintury, N.; Roy, C. A PSO Based MPPT Controller for Solar PV System at Variable Atmospheric Conditions. Adv. Comput. Paradig. Hybrid Intell. Comput. 2022, 12, 335–345. [Google Scholar]
- Zafar, M.H.; Khan, N.M.; Mirza, A.F.; Mansoor, M.; Akhtar, N.; Qadir, M.U.; Khan, N.A.; Moosavi, S.K.R. A novel meta-heuristic optimization algorithm based MPPT control technique for PV systems under complex partial shading condition. Sustain. Energy Tech. 2021, 47, 101367–101385. [Google Scholar]
- Kraiem, H.; Flah, A.; Mohamed, N.; Alowaidi, M.; Bajaj, M.; Mishra, S.; Sharma, M.; Sharma, S.K. Increasing electric vehicle autonomy using a photovoltaic system controlled by particle swarm optimization. IEEE Access 2021, 9, 72040–72054. [Google Scholar] [CrossRef]
- Sharma, A.; Dasgotra, A.; Tiwari, S.K.; Sharma, A.; Jately, V.; Azzopardi, B. Parameter extraction of photovoltaic module using tunicate swarm algorithm. Electronics 2021, 10, 878. [Google Scholar] [CrossRef]
- Liu, N.; Zhang, J.; Zhao, S.; Xu, J.; Wang, Y. A Novel MPPT Method Based on Large Variance GA-RBF-BP. In Proceedings of the IEEE 2017 Chinese Automation Congress, Jinan, China, 20–22 October 2017; pp. 3907–3911. [Google Scholar]
- Ouahib, G.; Ferhat, C.; Fatah, Y. Real-time implementation of a PSO-optimized fuzzy logic controller based on a MPPT algorithm using DSPACE board. Int. J. Elec. Eng. Educ. 2018, 18, 11–23. [Google Scholar]
- Elnozahy, A.; Yousef, A.M.; Abo-Elyousr, F.K.; Mohamed, M.; Abdelwahab, S.A.M. Performance improvement of hybrid renewable energy sources connected to the grid using artificial neural network and sliding mode control. J. Power Electron. 2021, 15, 1–14. [Google Scholar] [CrossRef]
- Ozdemir, S.; Altin, N.; Sefa, I. Fuzzy logic based MPPT controller for high conversion ratio quadratic boost converter. Int. J. Hydrogen Energy 2017, 42, 17748–17759. [Google Scholar] [CrossRef]
- Titri, S.; Larbes, C.; Toumi, K.Y.; Benatchba, K. A new MPPT controller based on the Ant colony optimization algorithm for Photovoltaic systems under partial shading conditions. Appl. Soft Comput. 2017, 58, 465–479. [Google Scholar] [CrossRef]
- Fan, Y.; Wang, P.; Heidari, A.A.; Chen, H.; Mafarja, M. Random reselection particle swarm optimization for optimal design of solar photovoltaic modules. Energy 2022, 239, 121865. [Google Scholar] [CrossRef]
- Al-Qaness, M.A.; Ewees, A.A.; Fan, H.; AlRassas, A.M.; Elaziz, M. Modified aquila optimizer for forecasting oil production. Geo-Spat. Inf. Sci. 2022, 5, 1–17. [Google Scholar] [CrossRef]
- Robles-Algarín, C.; Taborda-Giraldo, J.; Rodriguez-Alvarez, O. Fuzzy logic based MPPT controller for a PV system. Energies 2017, 10, 2036. [Google Scholar] [CrossRef] [Green Version]
- Ramadan, H.S. Optimal fractional order PI control applicability for enhanced dynamic behavior of on-grid solar PV systems. Int. J. Hydrogen Energy 2017, 42, 4017–4031. [Google Scholar] [CrossRef]
- Arulmurugan, R. Optimization of perturb and observe based fuzzy logic MPPT controller for independent PV solar system. WSEAS Trans. Power Syst. 2020, 19, 159–167. [Google Scholar] [CrossRef]
- Ali, M.N.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M. Promising MPPT Methods Combining Metaheuristic, fuzzy and ANN Techniques for Grid-Connected Photovoltaic. Sensors 2021, 21, 1244. [Google Scholar] [CrossRef]
- Song, L.; Huang, L.; Long, B.; Li, F. A genetic-algorithm-based DC current minimization scheme for transformless grid-connected PV inverters. Energies 2020, 13, 746. [Google Scholar] [CrossRef] [Green Version]
- Lyden, S.; Galligan, H.; Haque, M.E. A hybrid simulated annealing and perturb and observe maximum power point tracking method. IEEE Syst. J. 2020, 15, 4325–4333. [Google Scholar] [CrossRef]
- Obiora, V.; Saha, C.; Bazi, A.A.; Guha, K. Optimisation of solar photovoltaic (PV) parameters using meta-heuristics. Microsyst. Technol. 2021, 27, 3161–3169. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PV Cell Parameters | Value | Boost Converter Parameters | Value |
|---|---|---|---|
| Open circuit voltage Uoc/V | 37.3 | Capacitor filter C1/μF | 150 |
| Short circuit current Isc/A | 8.66 | Boost inductaor L/mH | 2.7 |
| MPP voltage Ump/V | 30.7 | Output resistant R/Ω | 25 |
| MPP current Imp/A | 8.15 | Output capacitor C2/μF | 150 |
| Uoc temperature coefficient/(%/deg.c) | −0.3609 | — | — |
| Isc temperature coefficient/(%/deg.c) | 0.08699 | — | — |
| Maximum power Pm/W | 250.205 | — | — |
| E/EC | NB | NM | NS | Z0 | PS | PM | PB |
|---|---|---|---|---|---|---|---|
| NB | NB | NB | NB | NM | NM | NM | NB |
| NM | NB | NB | NM | NS | NS | NS | NM |
| NS | NB | NS | NS | Z0 | NS | NS | NM |
| Z0 | NS | NS | NS | Z0 | PS | PS | PS |
| PS | PM | PS | PS | PS | PM | PB | PB |
| PM | PB | PM | PS | PS | PM | PB | PB |
| PB | PB | PB | PB | PM | PS | PM | PB |
| Parameters | Value |
|---|---|
| Hiddennnum | 30 |
| Epochs | 1000 |
| Population size nPop | 50 |
| Maximum number of iterations Itmax | 100 |
| Initial temperature T0 | 100 |
| Markov chain L | 10 |
| Temperature attenuation coefficient k | 0.85 |
| Maximum annealing times T_It | 10 |
| MPPT Algorithm | Amplitude of Power Oscillation/W | Tracking Time/s | Efficiency/% | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Stage 1 | Stage 2 | Stage 3 | Stage 4 | Stage 1 | Stage 2 | Stage 3 | Stage 4 | Stage 1 | Stage 2 | Stage 3 | Stage 4 | |||||
| Proposed algorithm | 0.73 | 0.75 | 0.81 | 0.75 | 0.003 | 0.002 | 0.002 | 0.003 | 99.6 | 99.5 | 99.6 | 99.5 | ||||
| SA–GA | 1.23 | 1.26 | 1.30 | 1.28 | 0.008 | 0.009 | 0.008 | 0.006 | 98.1 | 97.9 | 98.2 | 98.3 | ||||
| GA–BPNN | 1.76 | 1.9 | 1.86 | 1.74 | 0.009 | 0.008 | 0.009 | 0.008 | 97.83 | 97.3 | 97.8 | 97.2 | ||||
| PSO | 1.85 | 1.87 | 1.93 | 1.88 | 0.013 | 0.010 | 0.012 | 0.015 | 97.3 | 97.1 | 97.3 | 97.4 | ||||
| GWO | 2.11 | 2.17 | 2.25 | 2.19 | 0.018 | 0.012 | 0.014 | 0.016 | 96.9 | 96.8 | 97.1 | 96.8 | ||||
| FLC | 4.8 | 5.6 | 5.4 | 4.93 | 0.021 | 0.023 | 0.045 | 0.032 | 96.1 | 96.2 | 96.4 | 96.3 | ||||
| MPPT Algorithm | Steady state oscillation rate (%) | Maximum power deviation/W | ||||||||||||||
| Stage 1 | Stage 2 | Stage 3 | Stage 4 | Stage 1 | Stage 2 | Stage 3 | Stage 4 | |||||||||
| Proposed algorithm | 0.3 | 0.38 | 0.41 | 0.35 | 0.07 | 0.11 | 0.13 | 0.09 | ||||||||
| SA–GA | 0.71 | 0.73 | 0.75 | 0.74 | 0.21 | 0.27 | 0.33 | 0.25 | ||||||||
| GA–BPNN | 0.93 | 0.91 | 0.96 | 0.89 | 0.34 | 0.41 | 0.45 | 0.37 | ||||||||
| PSO | 1.13 | 1.17 | 1.21 | 1.15 | 0.64 | 0.67 | 0.71 | 0.65 | ||||||||
| GWO | 1.25 | 1.27 | 1.32 | 1.23 | 0.71 | 0.75 | 0.82 | 0.73 | ||||||||
| FLC | 3.5 | 3.8 | 3.7 | 3.5 | 1.2 | 1.4 | 1.5 | 1.3 | ||||||||
| Indicator | Friedman Test | Kruskal–Wallis Test | p Value | ||
|---|---|---|---|---|---|
| Mean Square | P | Mean Square | P | P | |
| Amplitude of power oscillation | 0.4167 | 0.0083 | 3.079 | 0.0003 | 0.0061 |
| Tracking time | 1.5722 | 0.0076 | 3.938 | 0.0006 | 0.0093 |
| Efficiency | 1.1719 | 0.0446 | 3.257 | 0.0007 | 0.0321 |
| Steady state oscillation rate | 0.6556 | 0.0072 | 1.639 | 0.0004 | 0.0083 |
| Maximum power deviation | 0.8652 | 0.0004 | 1.854 | 0.0005 | 0.0045 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Wang, Y.-J.; Zhang, Y.; Yu, T. Photovoltaic Fuzzy Logical Control MPPT Based on Adaptive Genetic Simulated Annealing Algorithm-Optimized BP Neural Network. Processes 2022, 10, 1411. https://doi.org/10.3390/pr10071411
Zhang Y, Wang Y-J, Zhang Y, Yu T. Photovoltaic Fuzzy Logical Control MPPT Based on Adaptive Genetic Simulated Annealing Algorithm-Optimized BP Neural Network. Processes. 2022; 10(7):1411. https://doi.org/10.3390/pr10071411
Chicago/Turabian StyleZhang, Yan, Ya-Jun Wang, Yong Zhang, and Tong Yu. 2022. "Photovoltaic Fuzzy Logical Control MPPT Based on Adaptive Genetic Simulated Annealing Algorithm-Optimized BP Neural Network" Processes 10, no. 7: 1411. https://doi.org/10.3390/pr10071411
APA StyleZhang, Y., Wang, Y.-J., Zhang, Y., & Yu, T. (2022). Photovoltaic Fuzzy Logical Control MPPT Based on Adaptive Genetic Simulated Annealing Algorithm-Optimized BP Neural Network. Processes, 10(7), 1411. https://doi.org/10.3390/pr10071411