
Analytical Routes to Chaos and Controlling Chaos in Brushless DC Motors

Abstract
:1. Introduction
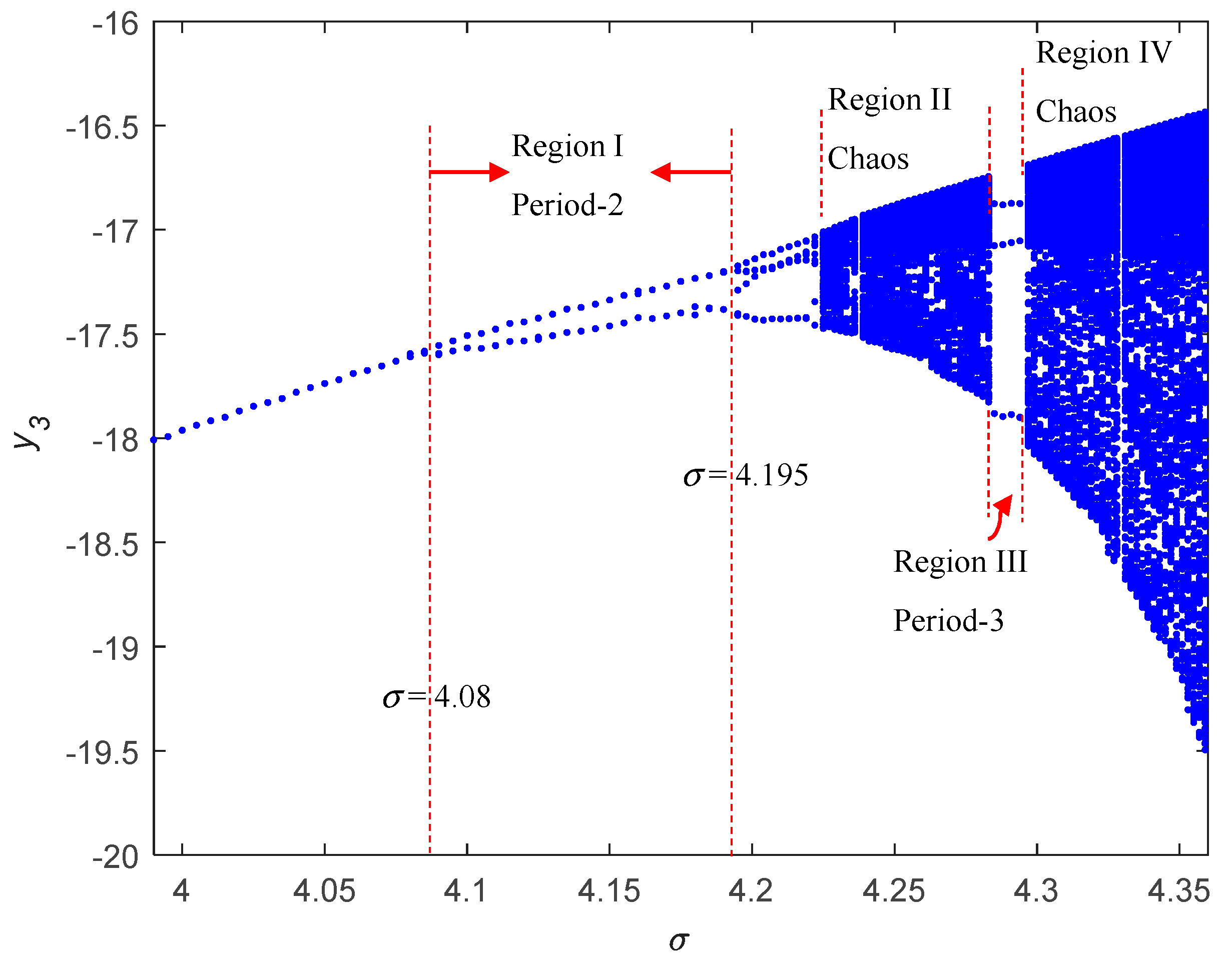
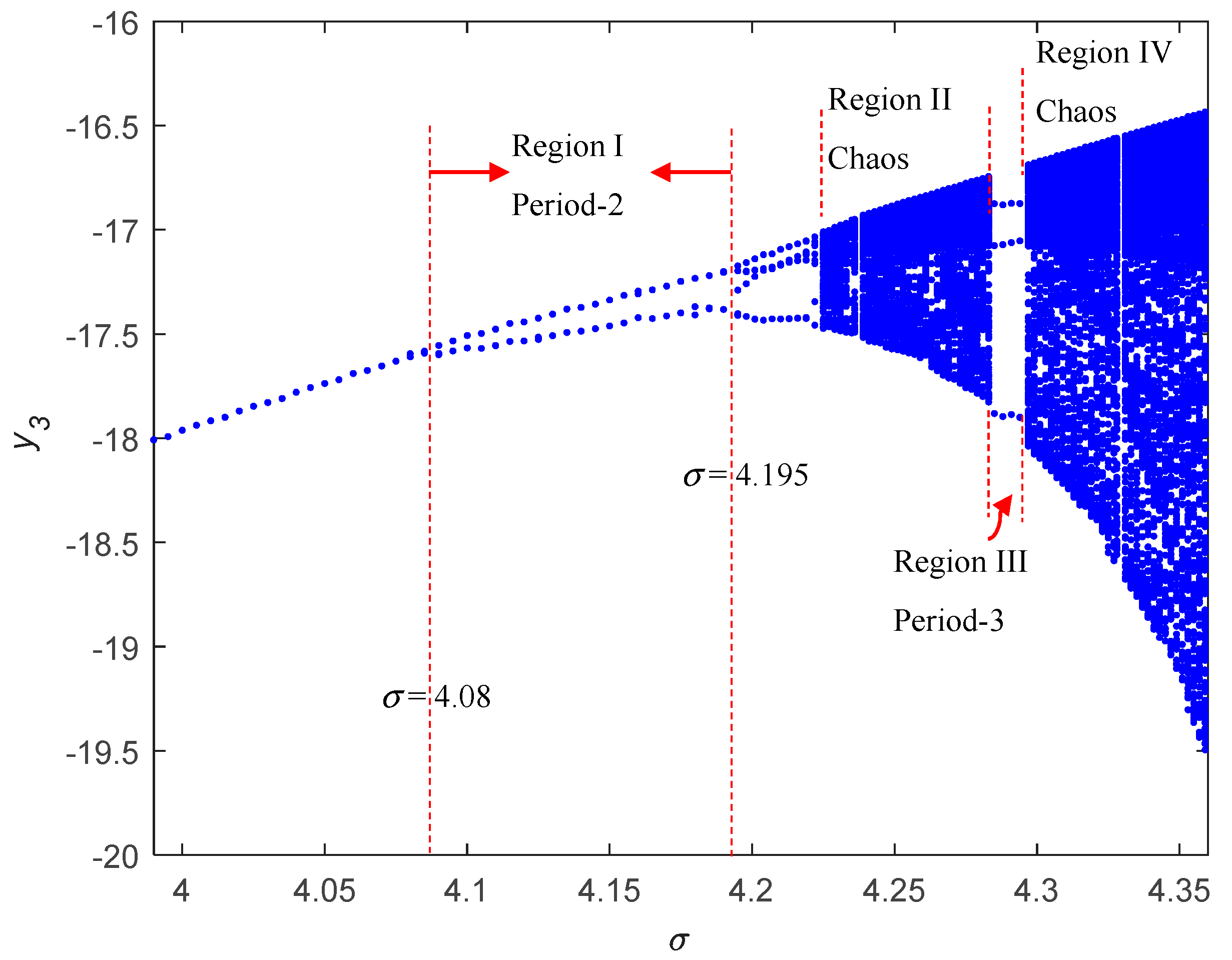
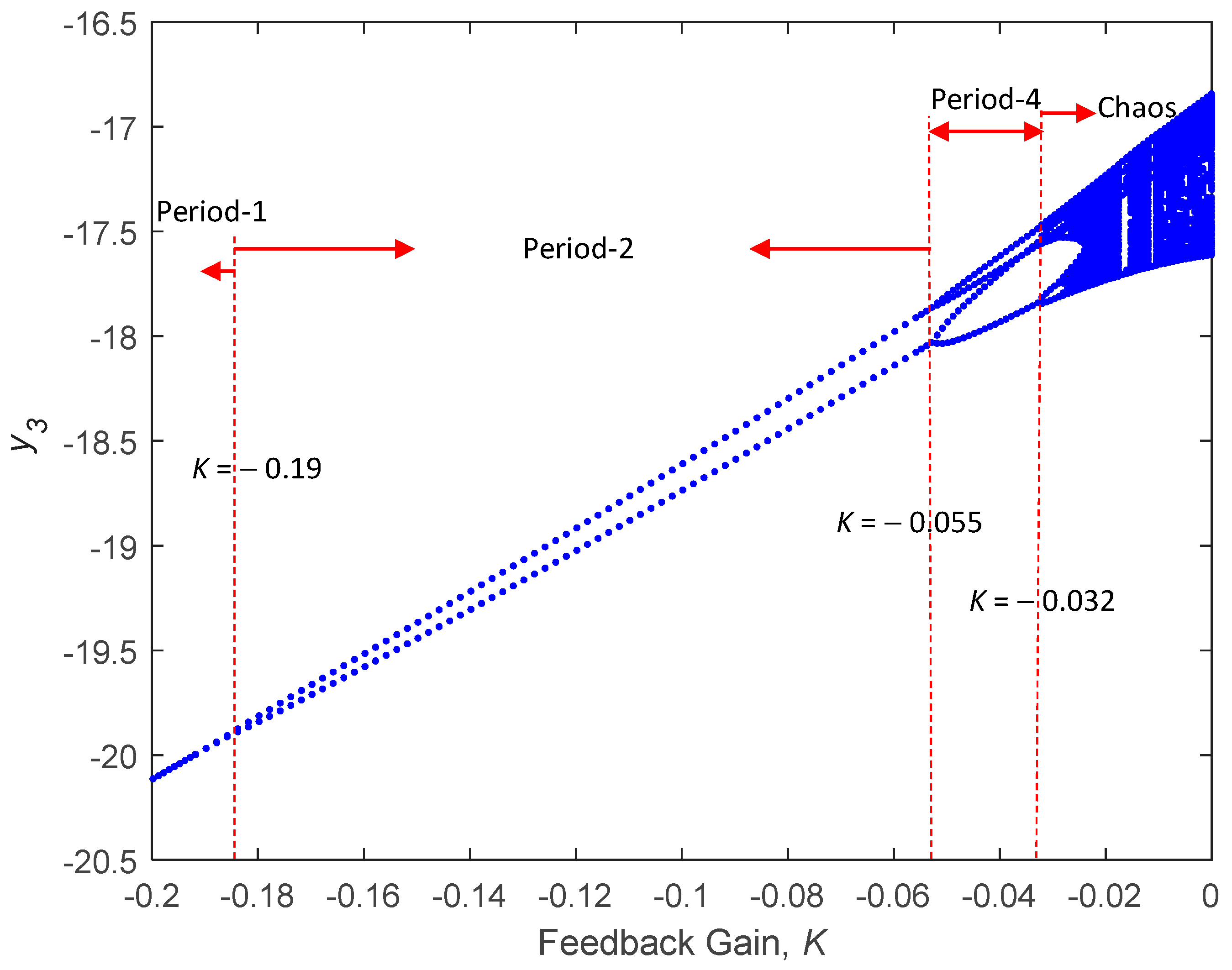
2. Description and Bifurcation Analysis of BLDCM
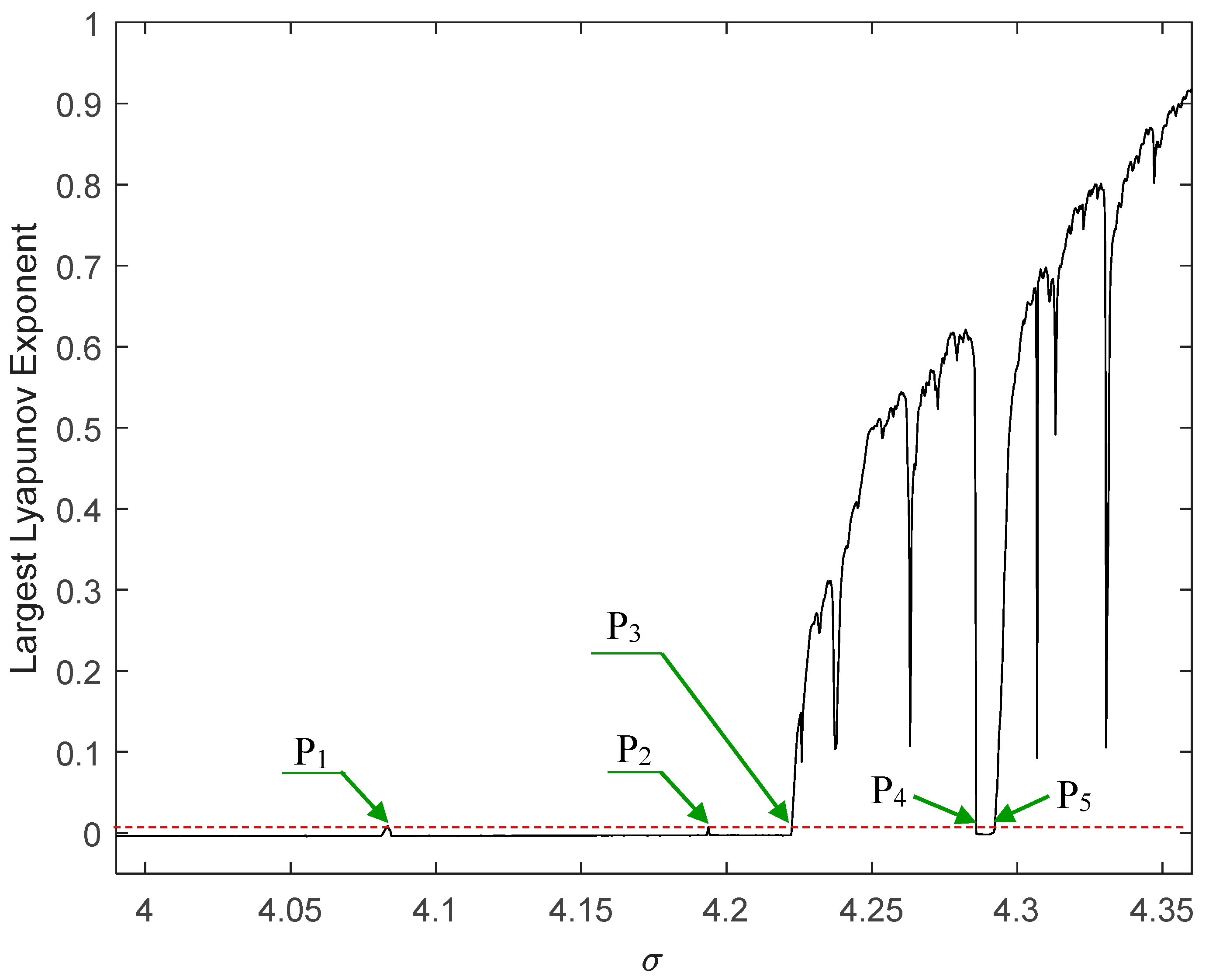
3. Lyapunov Exponents and Lyapunov Dimension for Examining Chaos in a BLDCM
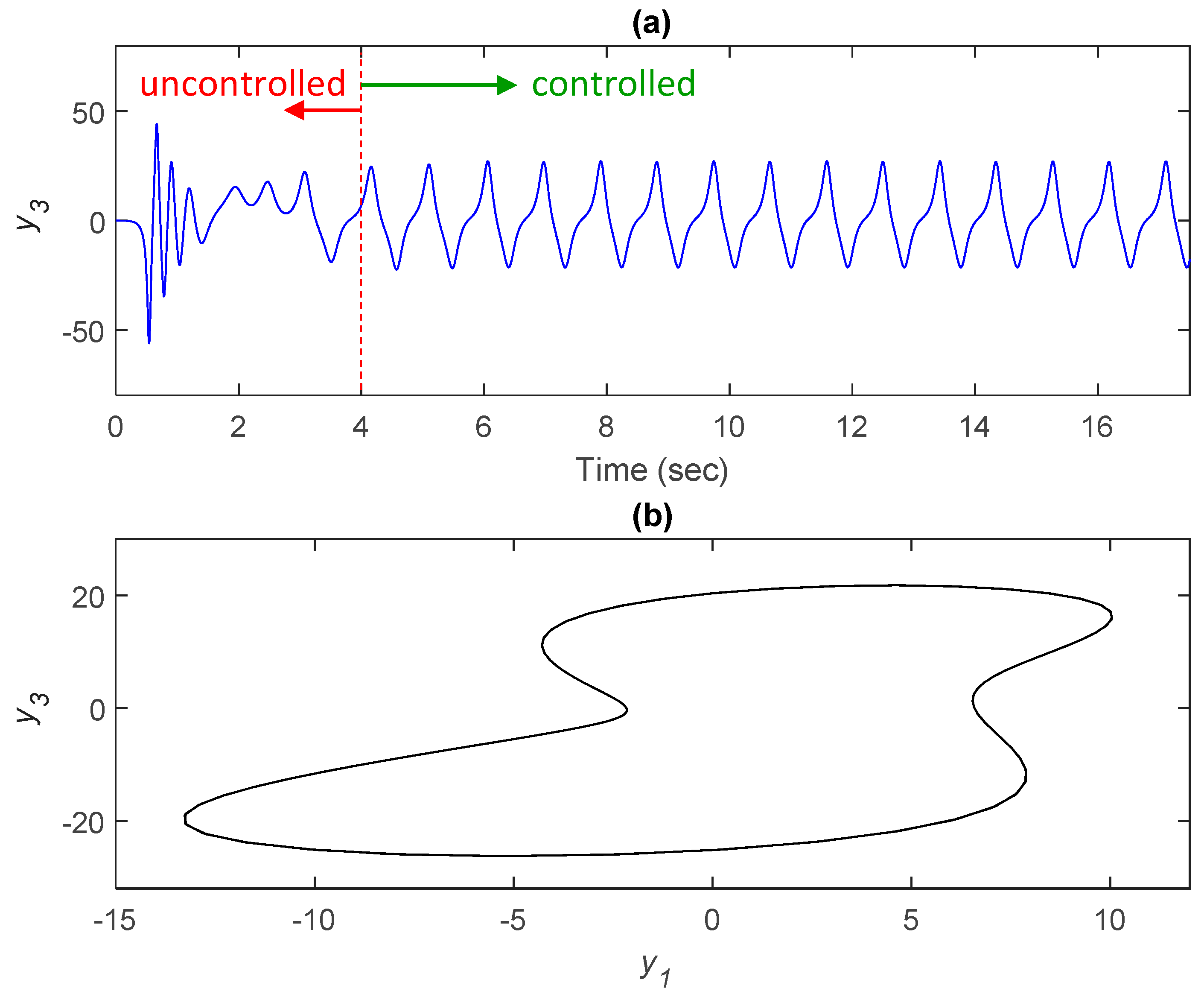
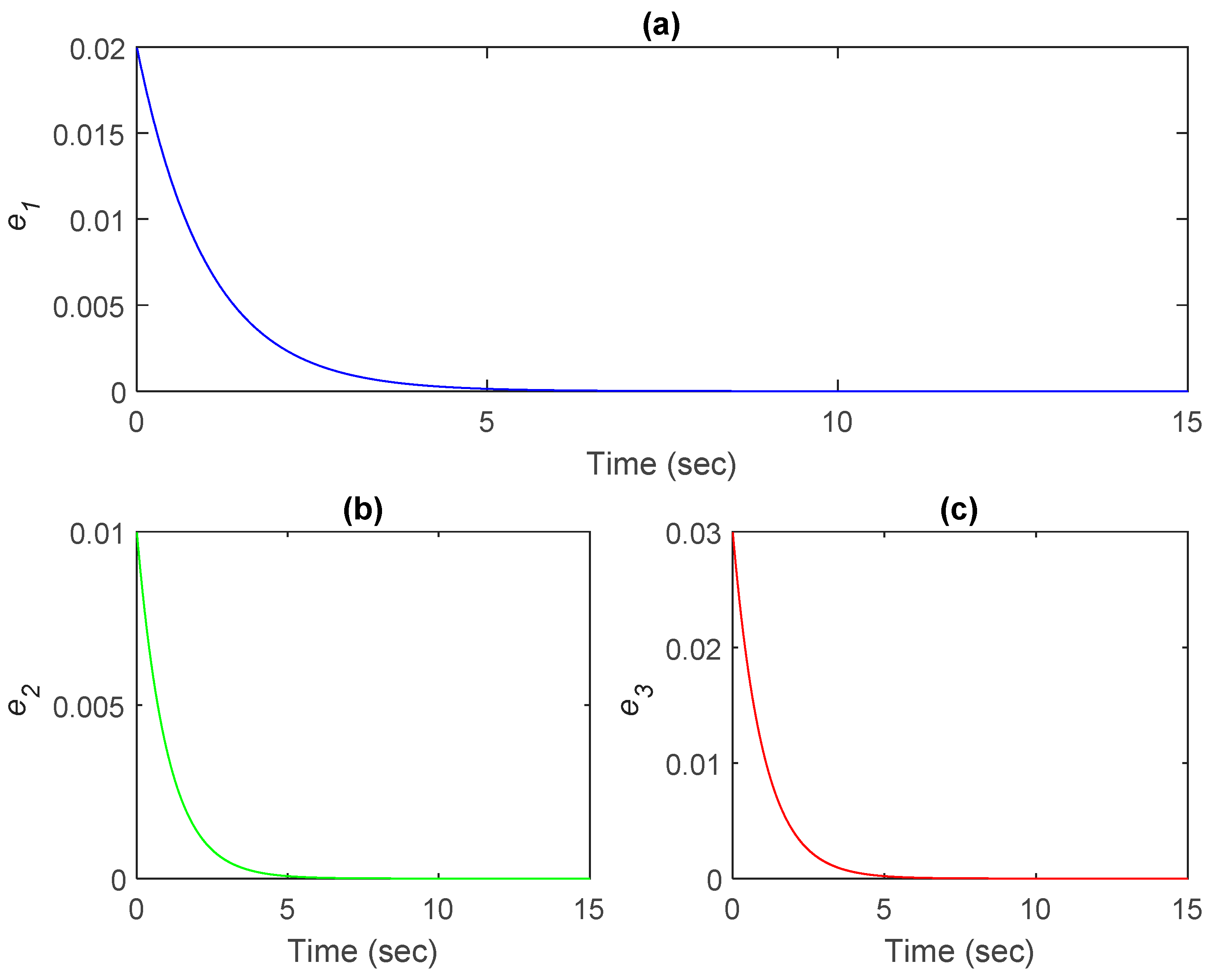
4. Controlling Chaos in BLDCM
5. Study of Parametric Perturbation in BLDCM
6. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Praveen, R.P.; Ravichandran, M.N.; Achari, V.T.S.; Raj, V.P.J. A novel slotless Halbach-array permanent-magnet brushless DC motor for spacecraft applications. IEEE Trans. Ind. Electron. 2012, 59, 3553–3560. [Google Scholar] [CrossRef]
- Nadolski, R.; Ludwinek, K.; Staszak, J.; Jaśkiewicz, M. Utilization of BLDC motor in electrical vehicles. Prz. Elektrotechniczny 2012, 88, 180–186. [Google Scholar]
- Xiang, C.; Wang, X.; Ma, Y.; Xu, B. Practical modeling and comprehensive system identification of a BLDC motor. Math. Probl. Eng. 2015, 2015, 879581. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Goodman, A.; Gerada, C.; Fang, Y. A single sided matrix converter drive for a brushless DC motor in aerospace applications. IEEE Trans. Ind. Electron. 2011, 59, 3542–3552. [Google Scholar] [CrossRef]
- Srinivas, P. Design and FE Analysis of BLDC motor for electro-mechanical actuator. J. Electr. Syst. 2015, 11, 76–88. [Google Scholar]
- Jin, X.; Leng, J. Global exponential stabilization for brushless DC motors. Int. Core J. Eng. 2016, 2, 26–31. [Google Scholar]
- Gritli, H.; Belghith, S. Walking dynamics of the passive compass-gait model under OGY-based control: Emergence of bifurcations and chaos. Commun. Nonlinear Sci. 2017, 47, 308–327. [Google Scholar] [CrossRef]
- Sajid, M. Chaotic behaviour and bifurcation in real dynamics of two-parameter family of functions including logarithmic map. Abstr. Appl. Anal. 2020, 2020, 7917184. [Google Scholar] [CrossRef]
- Li, X.; Tan, Z.; Wang, X.; Liu, Y. Evolution of the discharge mode from chaos to an inverse period-doubling bifurcation in an atmospheric-pressure He/N2 dielectric barrier discharge in increasing nitrogen content. IEEE Trans. Plasma Sci. 2022, 50, 619–634. [Google Scholar] [CrossRef]
- Awal, N.M.; Epstein, I.R. Period-doubling route to mixed-mode chaos. Phys. Rev. E 2021, 104, 024211. [Google Scholar] [CrossRef]
- Chen, Z.; Xu, Y.; Ying, J. Analytical bifurcation tree of period-1 to period-4 motions in a 3-D brushless DC motor with voltage disturbance. IEEE Access 2020, 8, 129613–129625. [Google Scholar] [CrossRef]
- Zhang, F.; Lin, D.; Xiao, M.; Li, H. Dynamical behaviors of the chaotic brushless DC motors model. Complexity 2016, 21, 79–85. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhao, K.; Liu, D. Chaotic dynamic analysis of brushless DC motor. J. Math. Inform. 2016, 5, 39–43. [Google Scholar]
- Wolf, A.; Swift, J.B.; Swinney, H.L.; Vastano, J.A. Determining Lyapunov exponent from a time series. Phys. D 1985, 16, 285–317. [Google Scholar] [CrossRef] [Green Version]
- Ge, Z.M.; Chang, C.M.; Chen, Y.S. Anti-control of chaos of single time scale brushless dc motors and chaos synchronization of different order systems. Chaos Soliton Fract. 2006, 27, 1298–1315. [Google Scholar] [CrossRef]
- Roy, P.; Ray, S.; Bhattacharya, S. Control of chaos in brushless DC motor design of adaptive controller following back-stepping method. In Proceedings of the 2014 International Conference on Control, Instrumentation, Energy and Communication (CIEC), Calcutta, India, 31 January–2 February 2014. [Google Scholar]
- Kose, E.; Muhurcu, A. The control of brushless DC motor for electric vehicle by using chaotic synchronization method. Stud. Inform. Control 2018, 27, 403–412. [Google Scholar] [CrossRef] [Green Version]
- Cai, C.; Xu, Z.; Xu, W. Converting chaos into periodic motion by state feedback control. Automatica 2002, 38, 1927–1933. [Google Scholar] [CrossRef]
- Chang, S.C.; Lin, H.P. Chaos attitude motion and chaos control in an automotive wiper system. Int. J. Solids Struct. 2004, 41, 3491–3504. [Google Scholar] [CrossRef]
- Chang, S.C. Adoption of state feedback to control dynamics of vehicle with steer-by-wire system. Proc. Inst. Mech. Eng. D J. Automob. Eng. 2007, 221, 1–12. [Google Scholar] [CrossRef]
- Rafikov, M.; Balthazar, J.M. On an optimal control design for Rossler system. Phys. Lett. A 2004, 333, 241–245. [Google Scholar] [CrossRef]
- Rafikov, M.; Balthazar, J.M. On control and synchronization in chaotic and hyperchaotic systems via linear feedback control. Commun. Nonlinear Sci. Numer. Simul. 2008, 13, 1246–1255. [Google Scholar] [CrossRef]
- Rafikov, M.; Balthazar, J.M.; Tusset, A.M. An optimal linear control design for nonlinear systems. J. Braz. Soc. Mech. Sci. Eng. 2008, 30, 279–284. [Google Scholar] [CrossRef]
- Hemati, N.; Leu, M.C. A complete model characterization of brushless DC motors. IEEE Trans. Ind. Appl. 1992, 28, 172–180. [Google Scholar] [CrossRef]
- Hemati, N. Strange attractors in brushless DC motors. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1994, 41, 40–45. [Google Scholar] [CrossRef]
- Hemati, N. Dynamic analysis of brushless motors based on compact representations of the equations of motion. In Proceedings of the Conference Record of the 1993 IEEE Industry Applications Conference Twenty-Eighth IAS Annual Meeting, Toronto, ON, Canada, 2–8 October 1993. [Google Scholar]
- IMSL, Inc. User’s Manual−IMSL; MATH/LIBRARY: Houston, TX, USA, 1989. [Google Scholar]
- Guckenheimer, J.; Holmes, P. Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields; Springer: Berlin/Heidelberg, Germany; Dordrecht, The Netherlands; New York, NY, USA, 2013; Volume 42. [Google Scholar]
- Li, T.Y.; Yorke, J.A. Period three implies chaos. Am. Math. Mon. 1975, 82, 985–992. [Google Scholar] [CrossRef]
- Kaplan, J.L.; Yorke, J.A. Chaotic Behavior of Multidimensional Difference Equations, Lecture Notes in Mathematics; Springer: New York, NY, USA, 1979. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Hoboken, NJ, USA, 2002. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 60 | |
| 0.168 | |
| 20.66 | |
| 0.875 | |
| 0.26 | |
| 0.53 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, S.-C. Analytical Routes to Chaos and Controlling Chaos in Brushless DC Motors. Processes 2022, 10, 814. https://doi.org/10.3390/pr10050814
Chang S-C. Analytical Routes to Chaos and Controlling Chaos in Brushless DC Motors. Processes. 2022; 10(5):814. https://doi.org/10.3390/pr10050814
Chicago/Turabian StyleChang, Shun-Chang. 2022. "Analytical Routes to Chaos and Controlling Chaos in Brushless DC Motors" Processes 10, no. 5: 814. https://doi.org/10.3390/pr10050814
APA StyleChang, S.-C. (2022). Analytical Routes to Chaos and Controlling Chaos in Brushless DC Motors. Processes, 10(5), 814. https://doi.org/10.3390/pr10050814