2. Exeter Transformation
Let be a triangle and its tangential triangle.
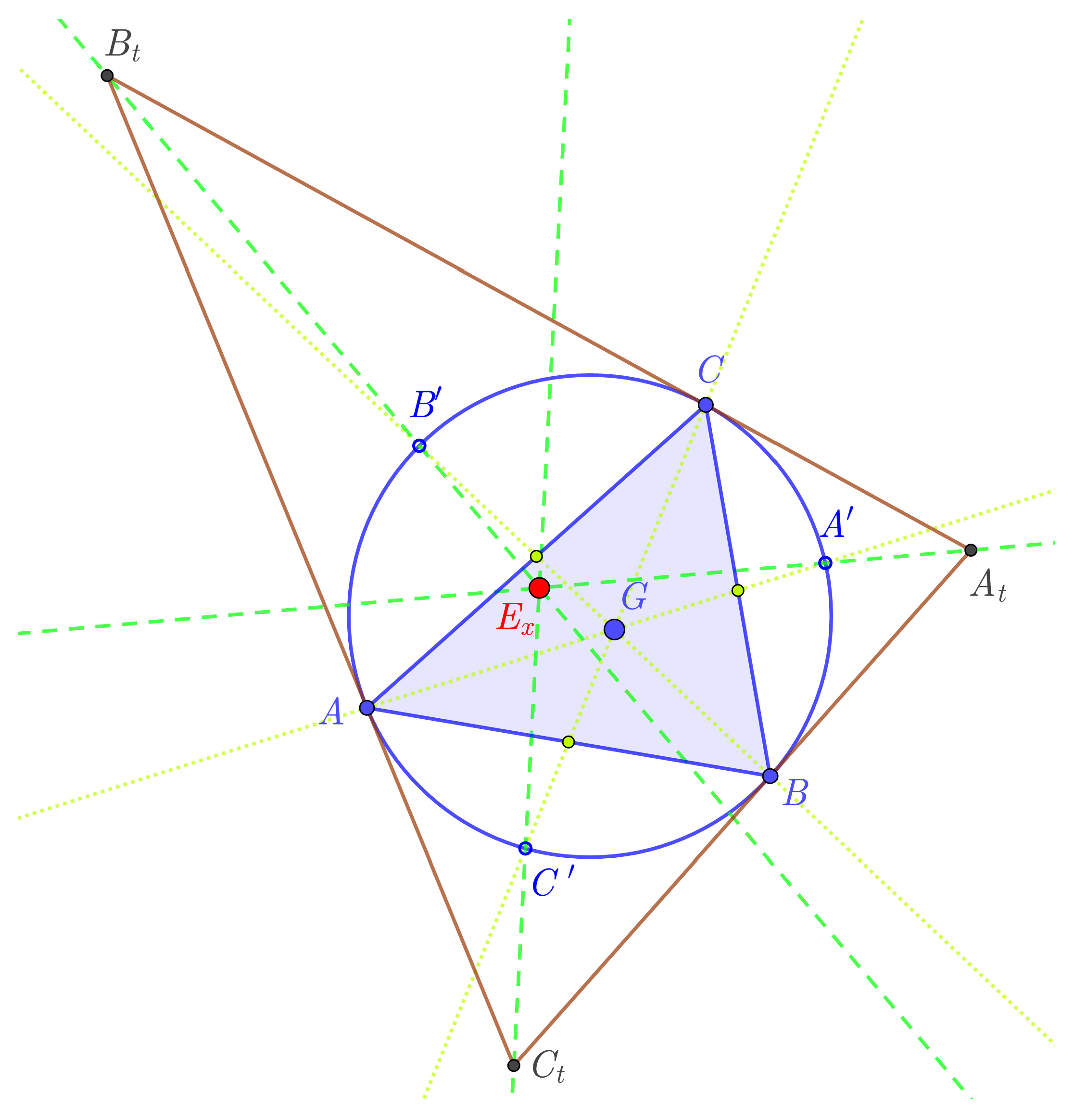
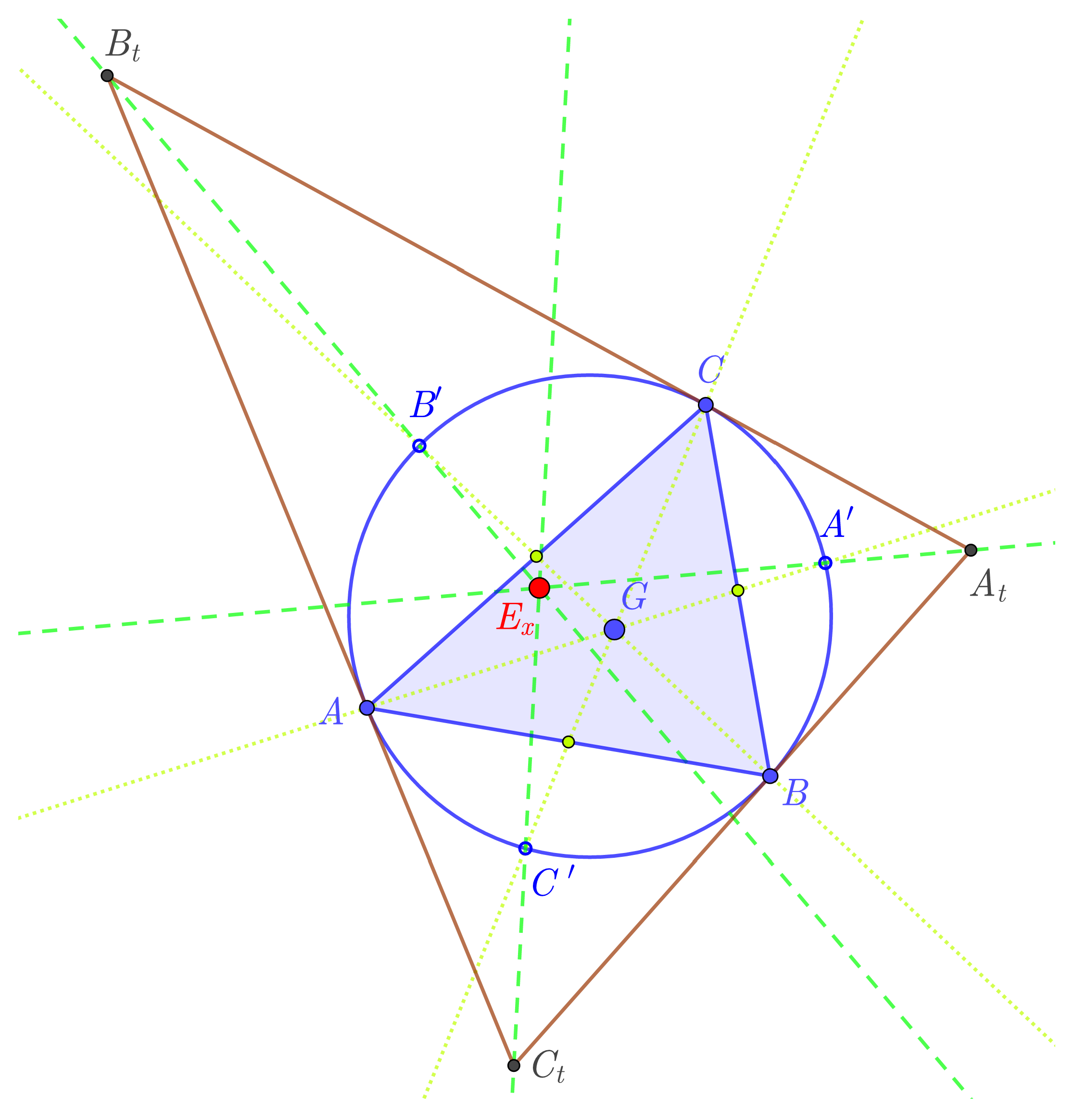
Definition 1 (Exeter point). Let G be the centroid of a triangle . Define to be the point (other than the polygon vertex A), where the triangle median through A meets the circumcircle of , and define and similarly. Three lines— , and —intersect at a point called the Exeter point of triangle ABC.
Therefore, Exeter point is the perspector of the circum-medial triangle , and the tangential triangle .
In
Figure 1, the centroid of the triangle
is signed as
G and the Exeter point as point
.
The cevian properties of medians and its intersection (centroid) in the previous definition enable us to generalize the point construction process and obtain a new point transformation in connection to a triangle and its tangential triangle :
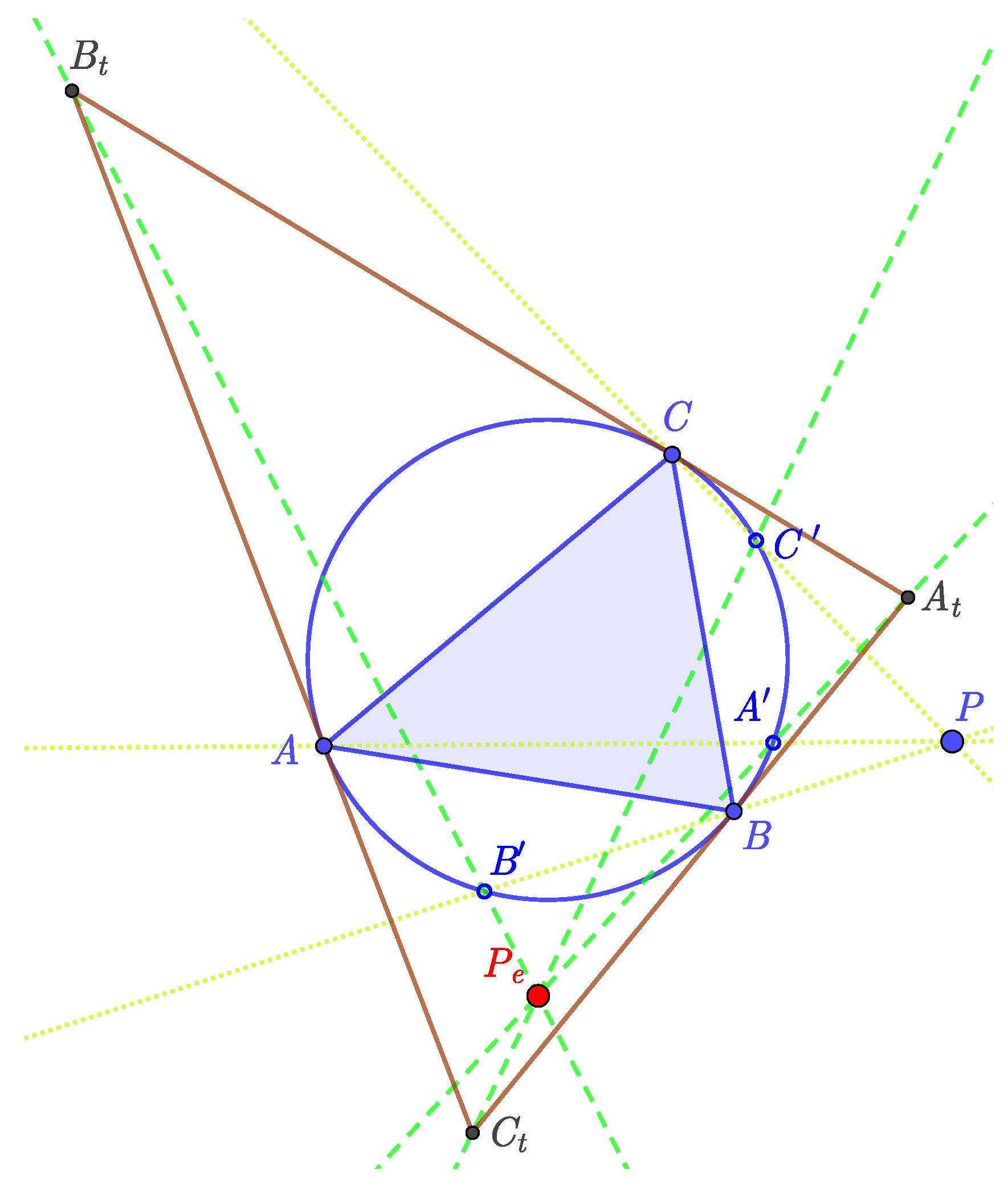
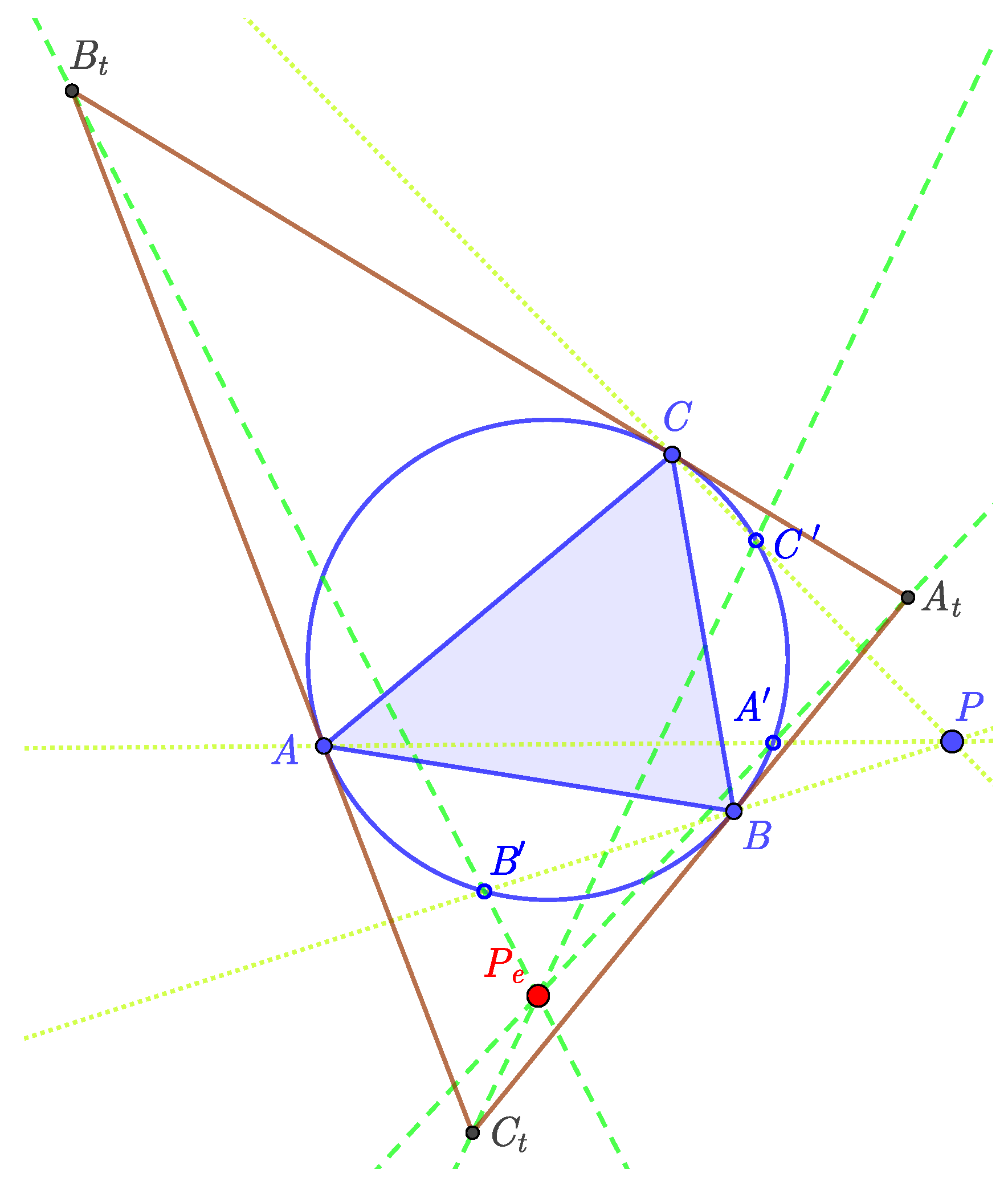
Definition 2 (Exeter transformation). Let P be an arbitrary point in the plane of the triangle . Define to be the point (other than the polygon vertex A) where the line meets the circumcircle of , and define and similarly. Three lines— , and —intersect at a point .
The transformation by which every point P is mapped onto the point by this process is called the Exeter transformation of the plane with respect to the triangle (see Figure 2). The first question naturally arises: are such three lines concurrent and we have a unique point for each P? For verifying our statements, we use an analytical way with barycentric coordinates.
Let
be the fundamental non-degenerate triangle with sidelengths
,
,
, where the barycentric coordinates of
A,
B and
C are
,
, and
, respectively. Let the angle
C be its largest (not smaller than the others) angle. Let
be the circumcircle of
with equation
and let the triangle
be the tangential triangle of
. Now, the sides of
are on the tangent lines to
at the vertices of
. Thus, if
is an acute triangle, then the incircle of
coincides with
(the triangle
is known as the Gergonne triangle of
). If
is an obtuse triangle, then
is one of the excircles of
. If
is right angled, then
is an ideal point. In all cases, the segment
touches the circle
at point
C. In the projective sense, the lines of the sides of
divide the plane into four subsets. One is bounded, the others are unbounded in the affine sense. Let
denote the subset which contains
.
The homogeneous barycentric coordinates of the vertices of
are
Points , and are also known as exsymmedian points with respect to . As usual, we denote the homogeneous barycentric coordinates by and the normalized (or absolute) barycentric coordinates by .
We consider an arbitrary point in the plane of triangle
where
,
,
and
, so at least two coordinates are not zero (
,
or
). Let the lines
,
, and
meet
at
,
, and
, respectively.
Lemma 1. The lines , and from Definition 2 are concurrent for all arbitrary point P.
Proof. The equation of the line is . Similarly, the equations of lines and are and , respectively. Their intersection points with the circumcircle are , , and .
The equation of line
is
. Similarly, the equations of lines
and
are
and
, respectively. We then have from their coefficients that
which implies the concurrency. □
Let the point of concurrence of lines
,
, and
be
(
Figure 2). The image of a point
P under the Exeter transformation with respect to triangle
is the point
. We denote it by
. Let
be the centroid of
(
in [
1]). Then
is the Exeter point (
in [
1]) of triangle
. That is why we call this transformation the Exeter transformation.
In the following, we examine the Exeter transformation and give some of its properties:
Theorem 1. The barycentric coordinates of , which is the image of (, , ) over the Exeter transformation with respect to the triangle , arewhere , and . Proof. As the lines
,
, and
are concurrent according to Lemma 1, in order to determine the intersection point of lines
,
we solve the system of their equations, and we obtain the concurrence point
with barycentric coordinates (
2). □
Remark 1. If (P is not on any sideline of ), then from (2) we have Remark 2. If a triangle is equilateral, so , then the barycentric coordinates of are , and if , then the normalized barycentric coordinates of arewhere If we used the planar by projective coordinates (obtained from a projective base given by the points where , and C are triangle vertices and the centroid G is the “unit” point), instead of the barycentric with respect to the triangle , we would notice that the projective coordinates are the same as barycentric in case , but this way we would lose the Euclidean metrical properties of the Exeter transformation. However, we could extend Theorem 1 to the projective plane. Thus, the Exeter transformation works if we consider any circumconic of a triangle A, B, C and its tangential triangle .
Corollary 1. The range of the Exeter transformation is .
Proof. We have to prove that is in . For this, we project the point from the vertices of to the sidelines of , namely, from the vertices , and to the sidelines of . We show that these projected points are on the sides of .
For example, the barycentric coordinates of each point of the line are , where the parameter . If , then we have or , and in the case of the point coincides with C, which is one of the points of the circle . Thus, the parameters describe one of the segments , which is the side of . Now, we consider the equation of the line (in the proof of Lemma 1, it is the line ) and substitute into the equation. After a short calculation, we express , where . With similar calculation, we can prove that the other two projected points are on the sides of as well. □
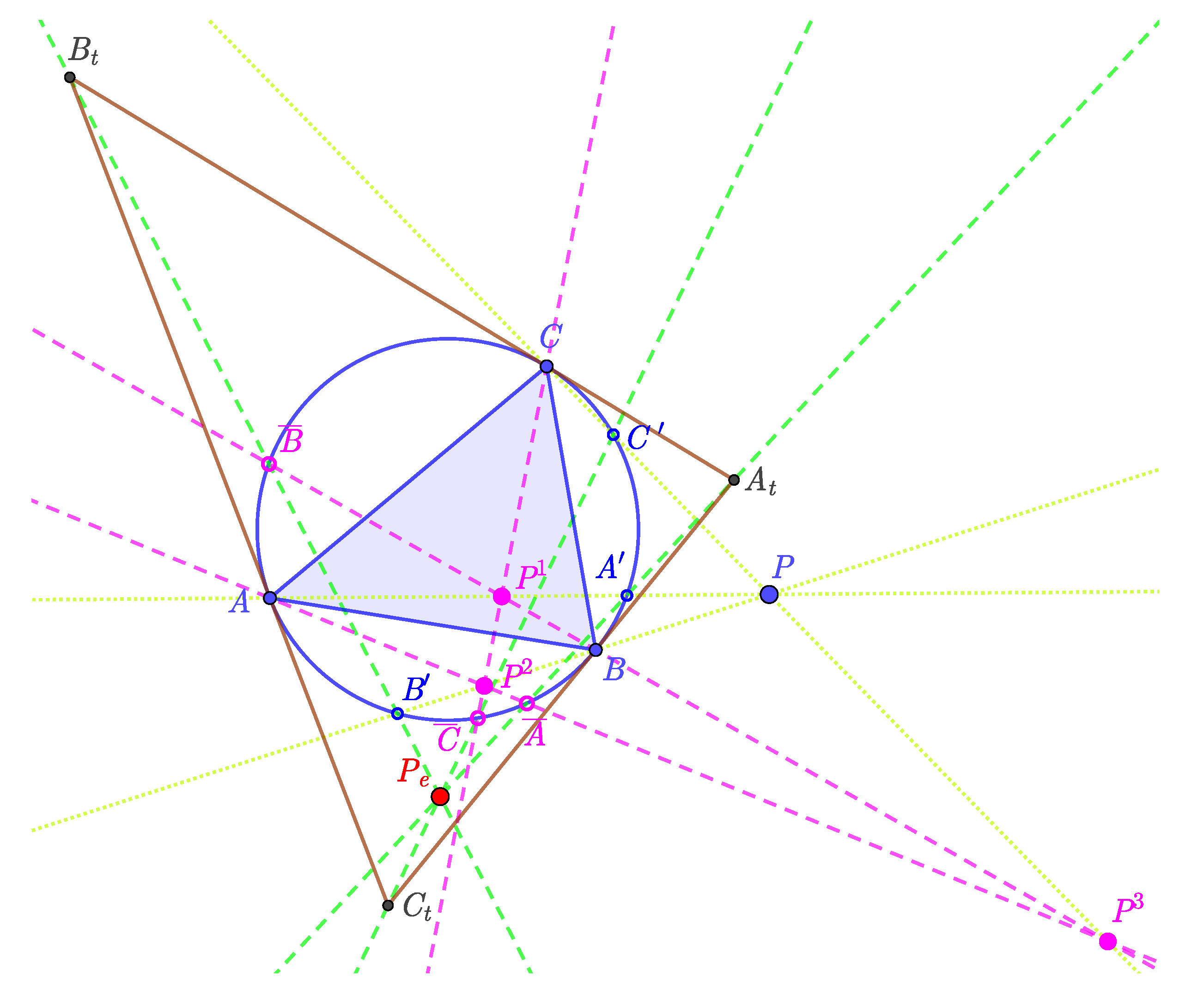
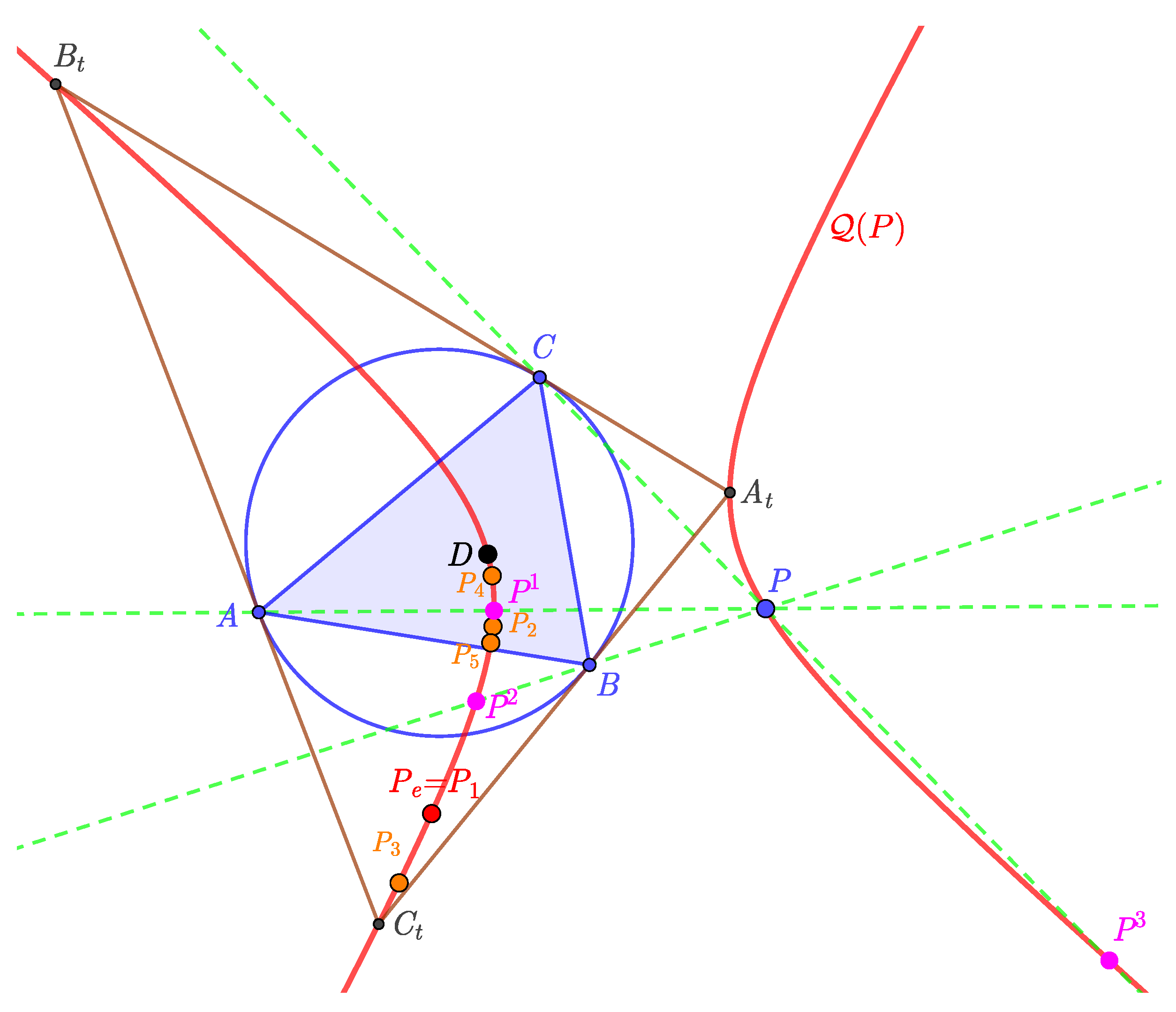
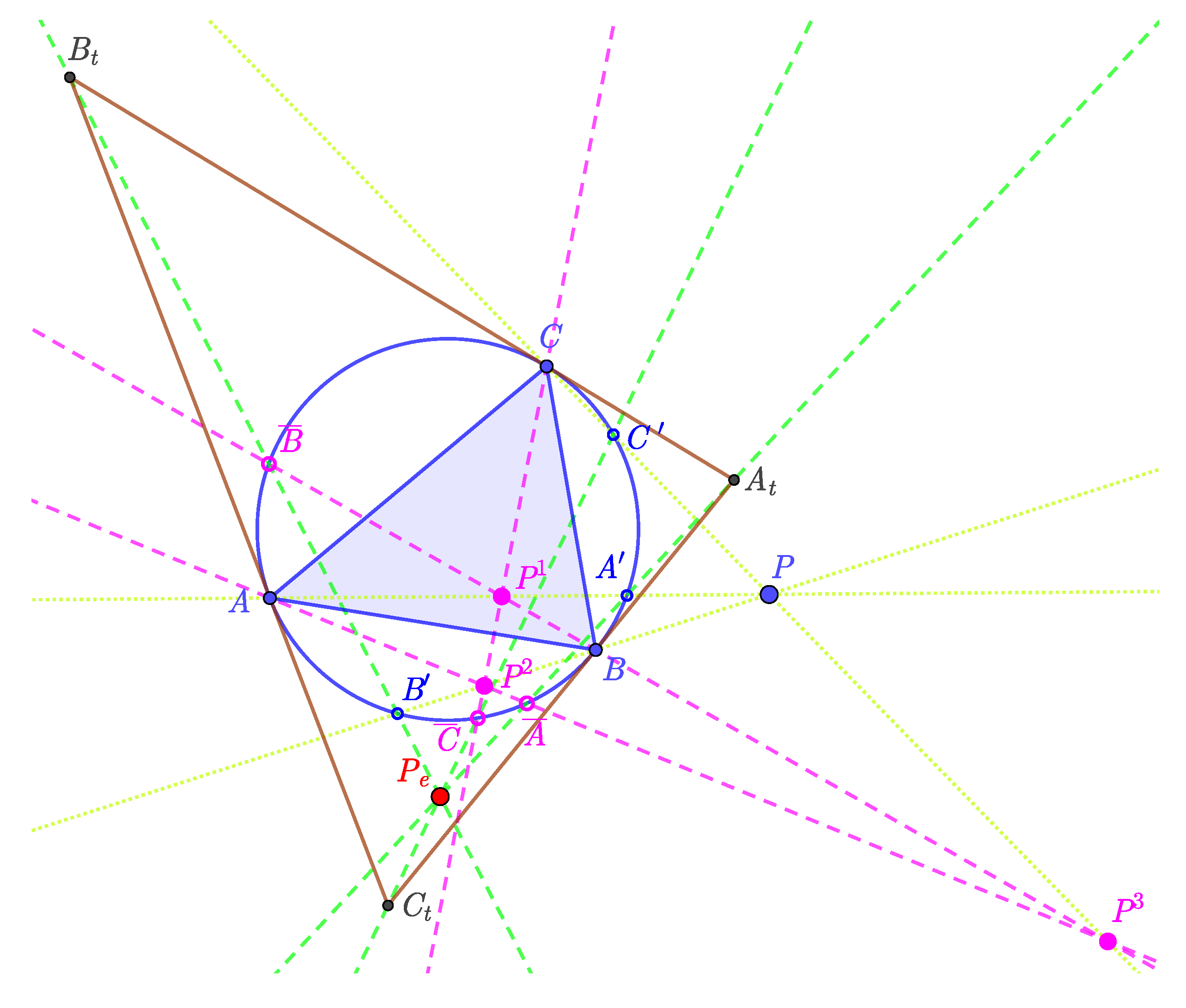
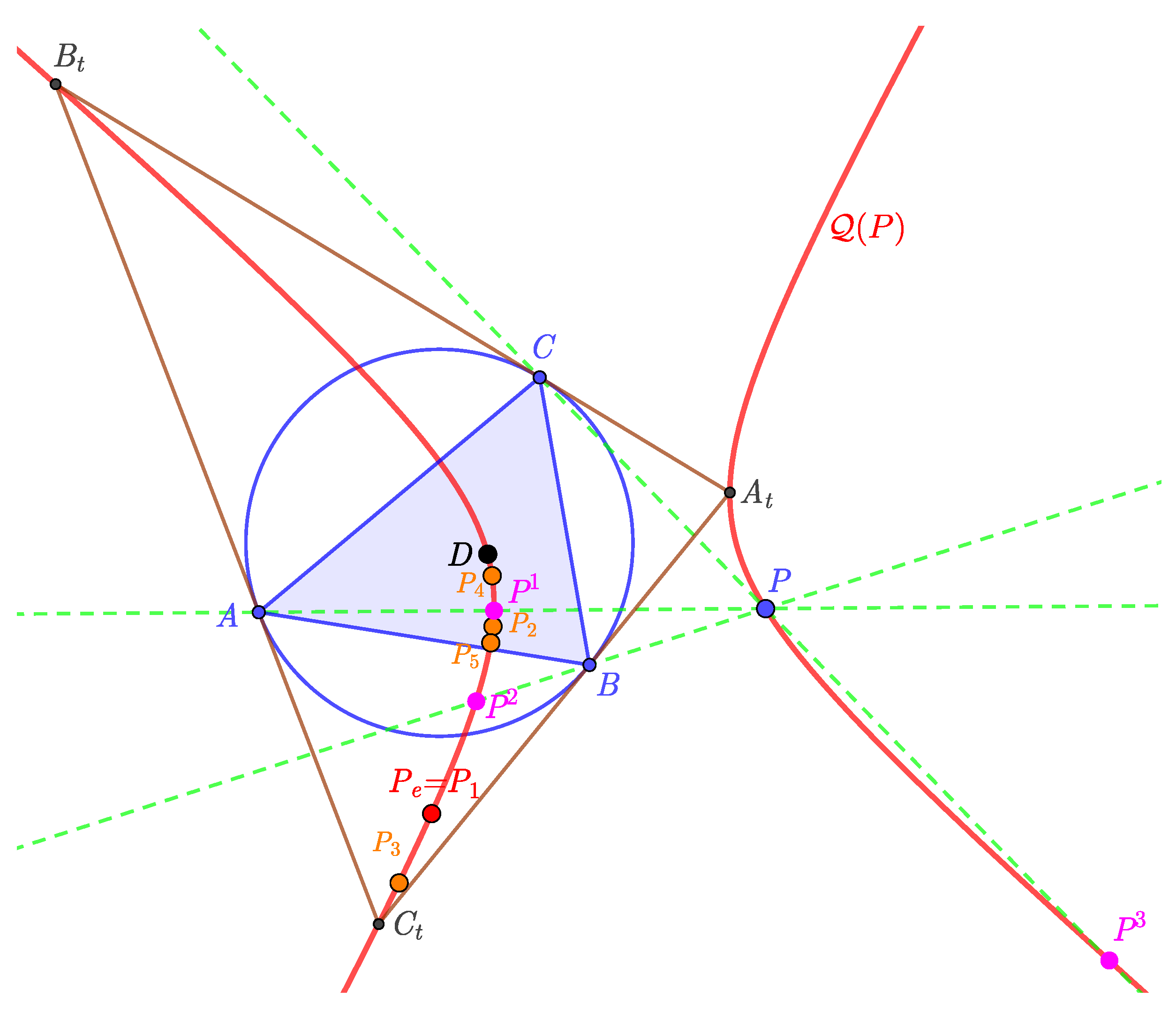
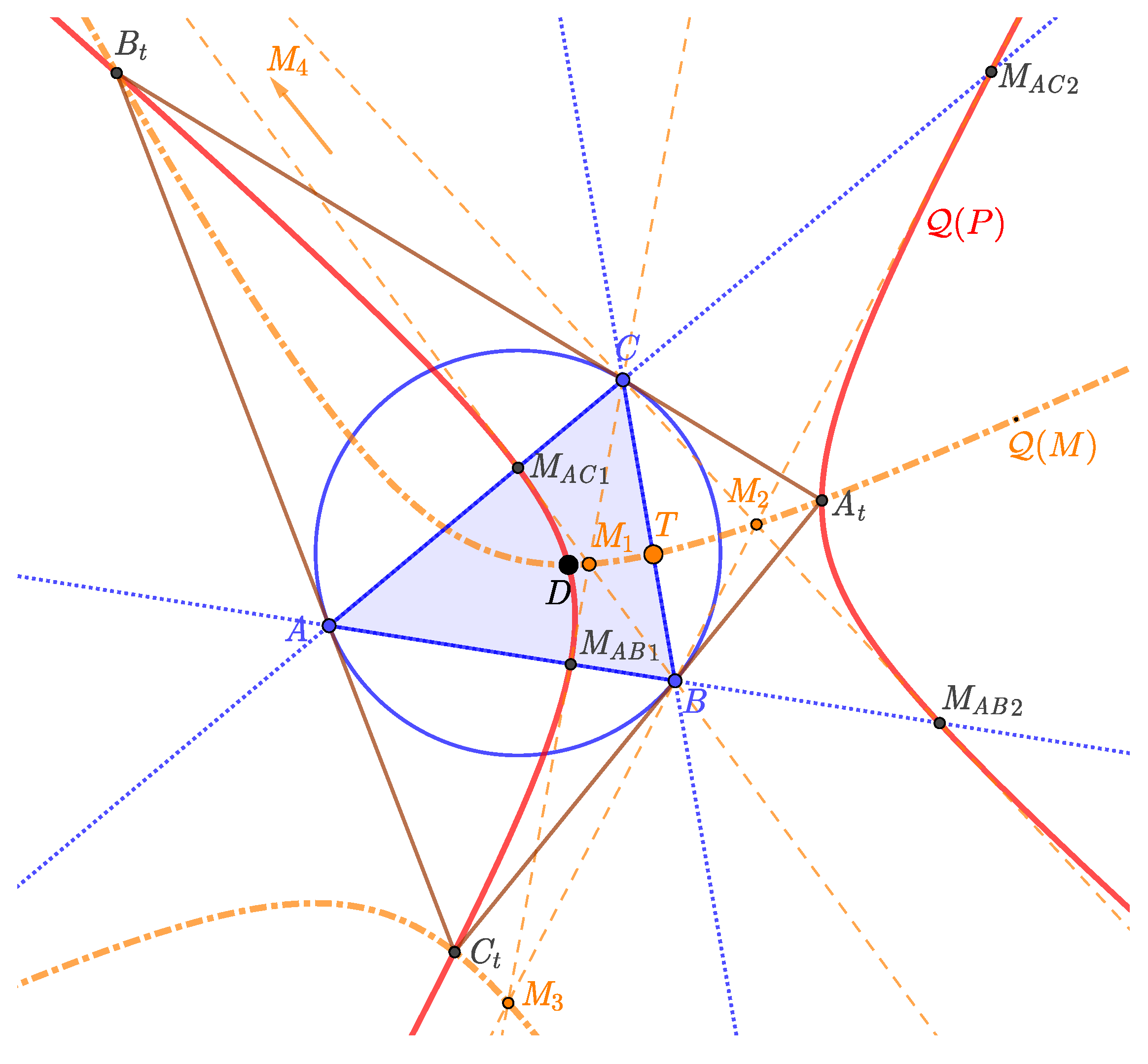
Corollary 2. If and , then , because (2) contains only even powers of the coordinates of P (recall ). Thus, generally, there are four points which have the same image with respect to the Exeter transformation. Let , , , and . Figure 3 shows the constructions of points
. For example, line
intersects
in point
as well, and the intersection point of lines
and
is
. Follow the construction of the image of
with respect to the Exeter transformation, then the result is
. Similarly, using
and
we obtain points
and
.
Corollary 3. If we consider the centroid of and the vertices of the anticomplementary triangle of with coordinates , , and , respectively, then their common image is the point , which is the Exeter point () of .
Theorem 2. The Exeter transformations of the lines , , and (except points A, B, C) are the points , and , respectively.
Proof. The equation of line
is
, so if
P is on line
then the coordinates are
. Therefore, from (
2), as
, we have
, where
. The proof is similar for the other lines. □
Corollary 4. If P is on one of the lines , or , then some points from among for coincide.
Corollary 5. If P, , , and are not on lines , , or , then they form a complete quadrangle with diagonal points A, B, and C.
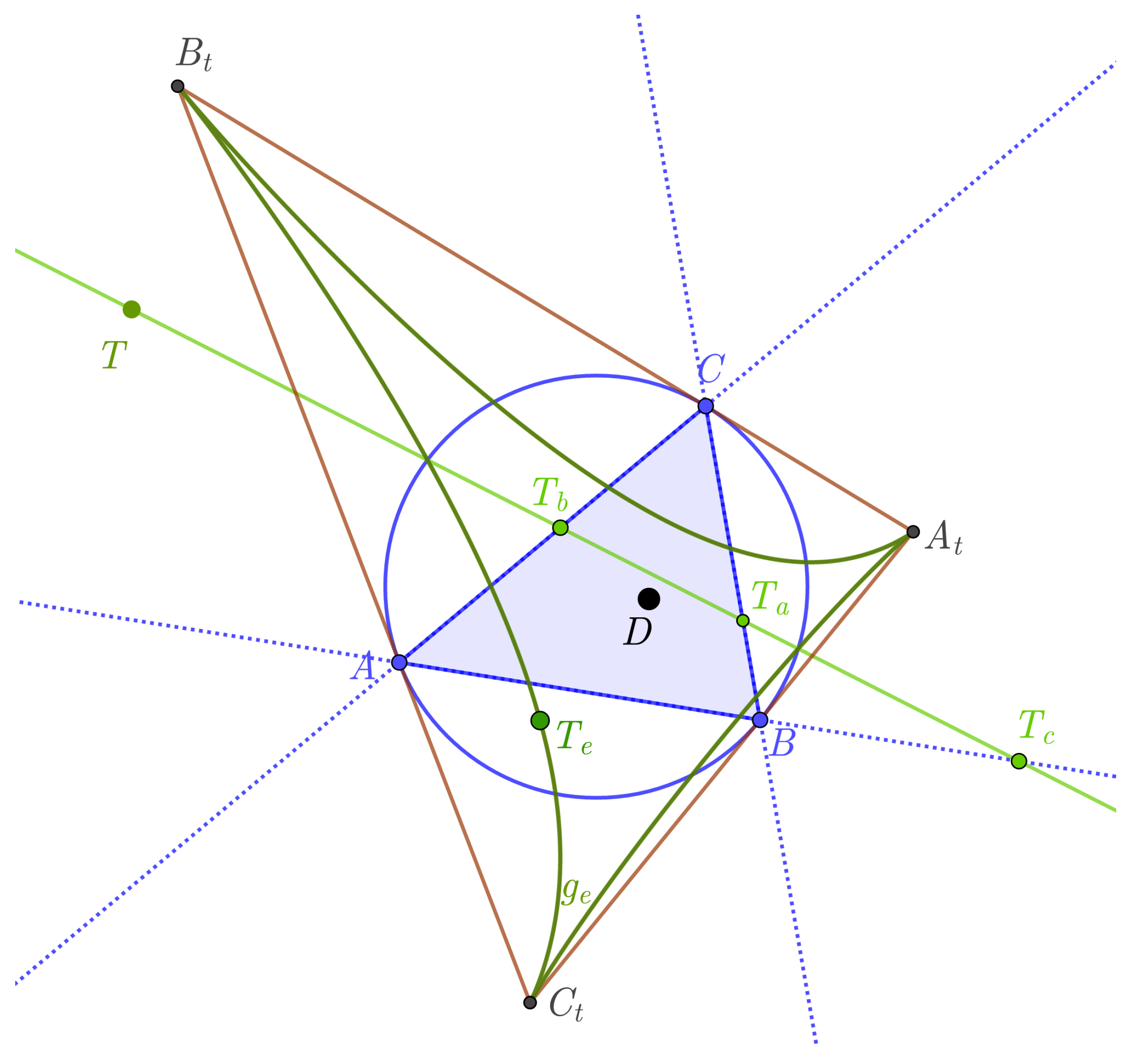
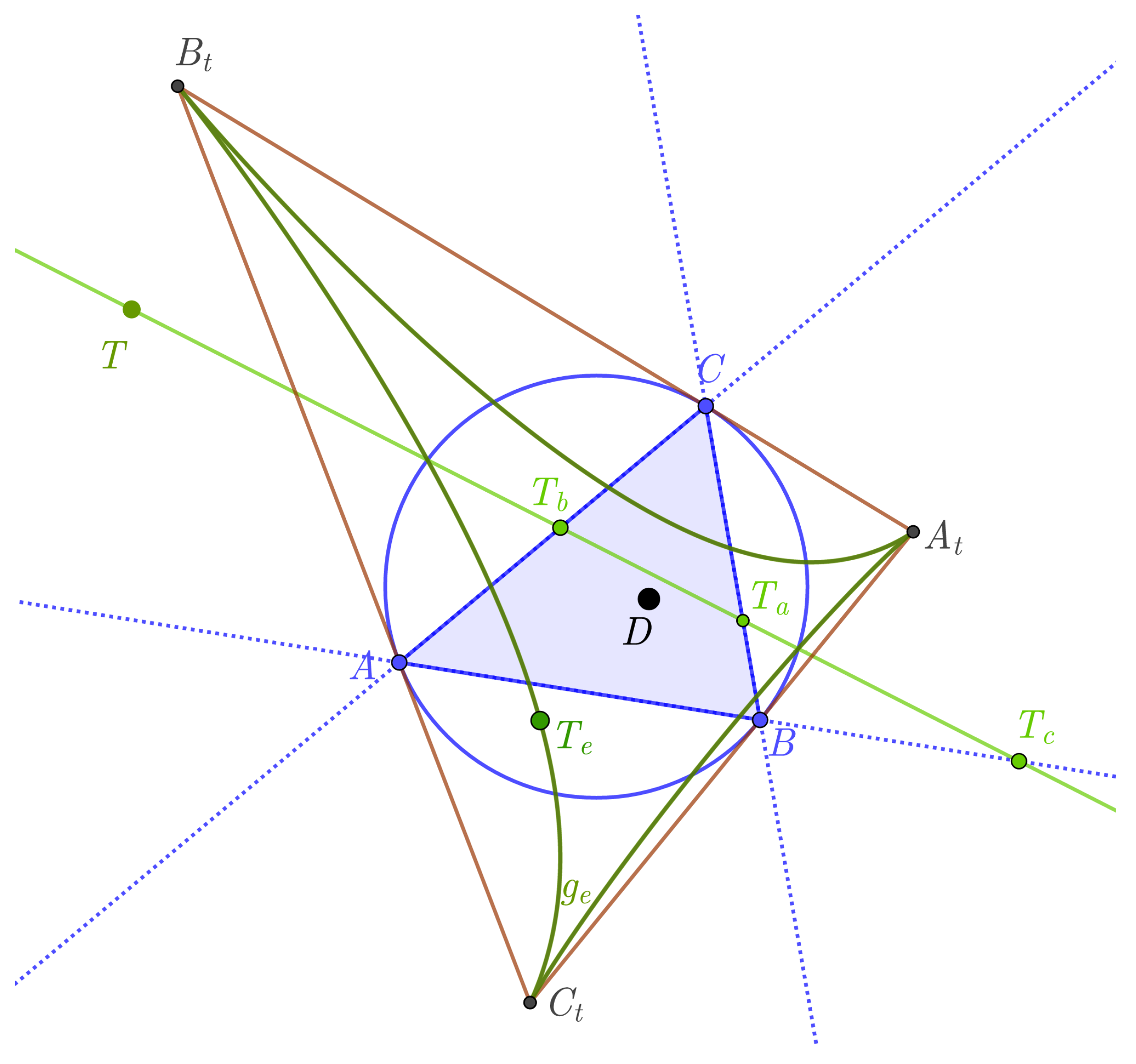
Theorem 3. The Exeter transformation of a line passing through neither points A, B, and C is a fourth-order curve incident with points , , and .
Proof. Without lost of generalization to give a general line
g we take the points
,
and
on lines
,
and
, respectively, with baricentric coordinates
,
and
, where
and
(
Figure 4). As
then
,
, and
are collinear if and only if
. Now, the equation of the line
g given by the points
,
, and
is, ex.,
Because the point
,
is incident with
g, then the parametric system of equations of the line
g with parameter
t can be considered as
,
,
, and the coordinates of the Exeter transformation of the point
T give the parametric system of equations of the Exeter transformation of the line
g. Thus, using for
T the Equation (
2) of the Exeter transformation, we have
where
,
, and
. As the degree of the polynomial
in variable
t is four (
and
are second degree polynomials), then all coordinates of
are polynomials in
t having degree four. Thus,
with points
, where
is a fourth-order curve. Moreover, according to Theorem 2 the images of
,
and
are
,
, and
, respectively (
Figure 4). □
2.1. Invariant Elements
Let
D be the symmedian point of
(
in [
1]). (The point of concurrence of lines
,
and
. Thus,
is perspective with
at the point
D. Furthermore, if
is acute, then
D is the Gergonne point of
, the point
in [
1].) It is well known that
Theorem 4. D is a fixed point of the Exeter transformation with respect to triangle ; moreover, .
Proof. It follows directly from Corollary 2. □
Theorem 5. The lines , , and are invariant lines with respect to the Exeter transformations. Their images are parts of . Moreover, if is acute, then the Exeter transformations of lines , , and are the segments , , and , respectively.
Proof. For example, let
P be on the line
. As lines
and
are the same, then
and
are on that line. Analytically, the equation of line
is
and the coordinates of its arbitrary point
P is
,
and its image with respect to (
2) is
, which is also on line
.
The proof is similar for the case of the other lines. □
Theorem 6. The circumcircle of triangle is fixed (all of its points are fixed, except A, B, and C) over the Exeter transformation, so .
Proof. The barycentric equation of
is
. If
is a point of
, then from
we have
Using (
2) we obtain
. Recall
, thus
. □
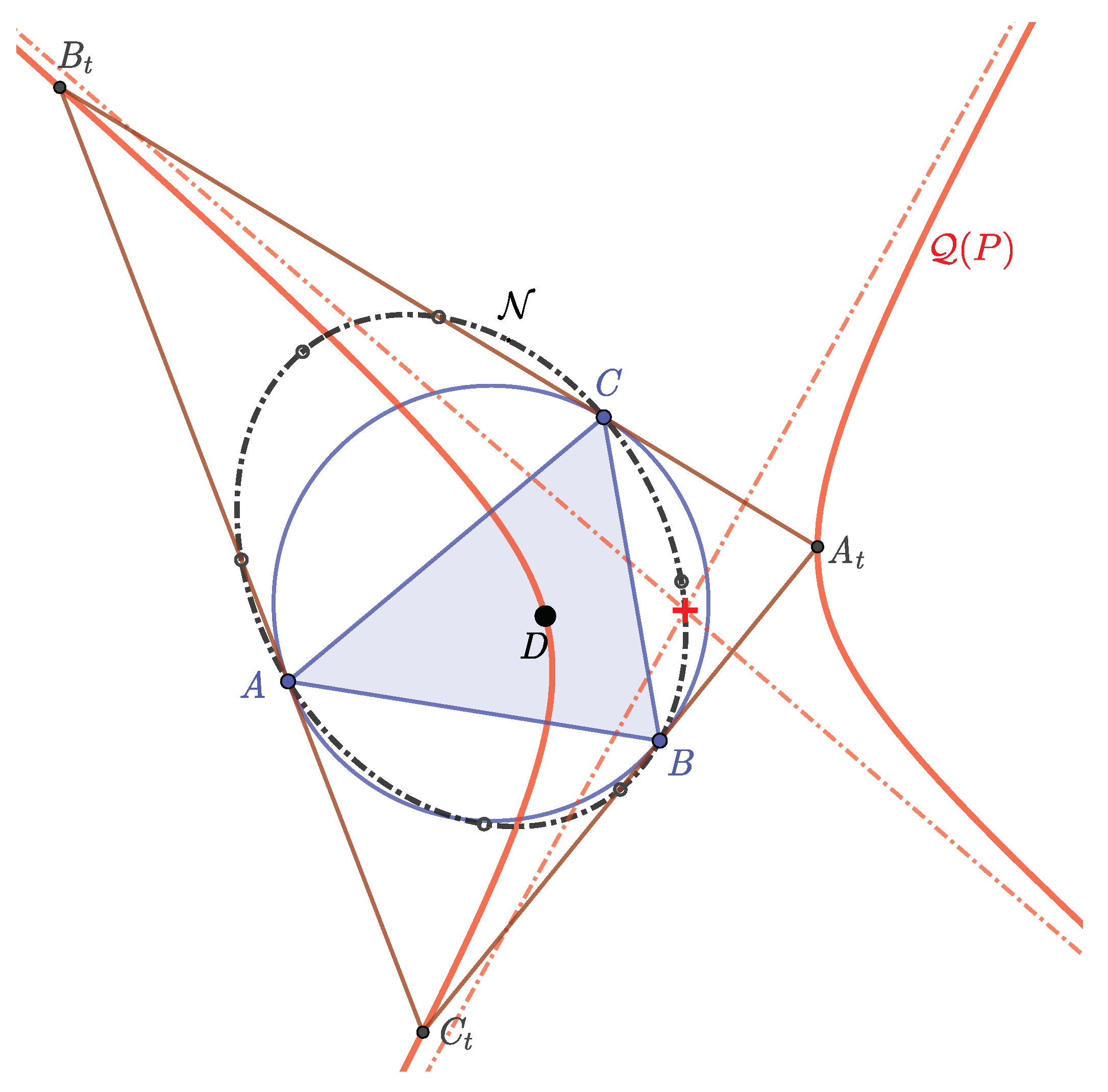
The points , , , and D determine a pencil of conic . Let denote the element of the pencil on which the point P lies. If is acute, then D is inside of the triangle , and the conics of the pencil are hyperbolas.
Theorem 7. The point and its image under the Exeter transformation with respect to triangle lie on the same conic of the pencil , so , and the equation of iswhereand are the barycentric coordinates of P. Proof. The equation of a conic is
Let
, without loss of generality. Substituting points
D,
,
,
, and
P into (
6) we have a system of five linear equations and after a homogenization the solution gives the Equation (
4) of
. Moreover, the coordinates of
satisfy the Equation (
4), so the image of
P is on
. □
Remark 3. If P is not on any sideline of , so , then the conic is non-degenerate.
Corollary 6. All conics (or degenerate conics-crossing lines at points A, B, or C) lying through the points , , and D are invariant. Furthermore, their fixed points are D and the intersection points with the circumcircle of .
Corollary 7. The images of lines , , and are parts of the lines , , and , respectively. Moreover, in the case of an acute they are the segments , , and , respectively.
Theorem 8. The image of the pencil of a line through A is a pencil of a line through and the corresponding lines intersect each other at the points of .
Proof. It is a simple corollary of the definition of the Exeter transformation. □
Let the point sequence () be the ith image of P. Thus, and .
Corollary 8. All elements of the point sequence () are on the same conic (see Figure 5). Proof. Every conic is clearly defined by five points. The conic is given by , , , D, and . From Theorem 7, we have that the point , the image of the point under the Exeter transformation, lies on the conic . Thus, , , , D, and also define . Recursively—using Theorem 7—we can prove that the point (and so ) lies on the conic as well. □
From Theorem 7 and Corollaries 2 and 8 we gain
Corollary 9. The points , , and are on the same conic .
Proof. If
and
,
, then not only
P satisfies the Equation (
4) of the conic
, but also each
does. □
Corollary 10. , , (See Figure 5). Proof. From Corollary 9, we know that, for example, the points and are on the same conic . The point lies on the line with the equation . Thus, they are concurrent. As a line has maximum two intersection points with a non-degenerate conic, the other intersection point of the line with must be . □
Corollary 11. The vertices of any complete quadrangle with diagonal points A, B, and C are on the same conic .
Proof. According to Corollary 10 and Corollary 5 we know that , lie on the same conic and (clearly) define a complete quadrangle with diagonal points A, B and C. Moreover, it is also well known that a complete quadrangle is clearly defined by three diagonal points and a vertex, i.e., A, B, C, and any point P, where P does not lie on the sidelines of the triangle . The corollary summarizes these statements. □
2.2. Tangent Lines
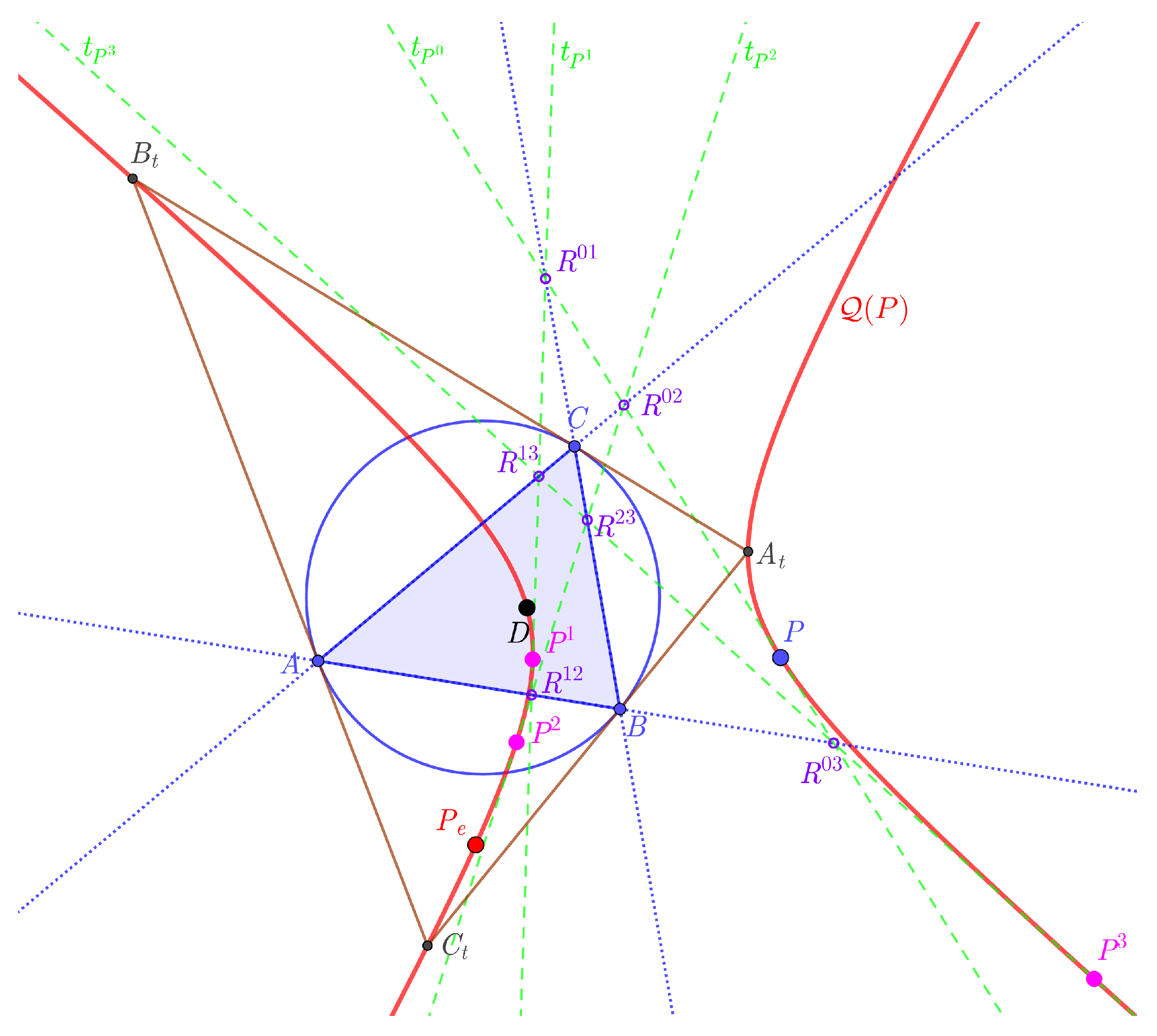
Let be a non-degenerate conic of the pencil . Let us denote by the tangent line to at a point .
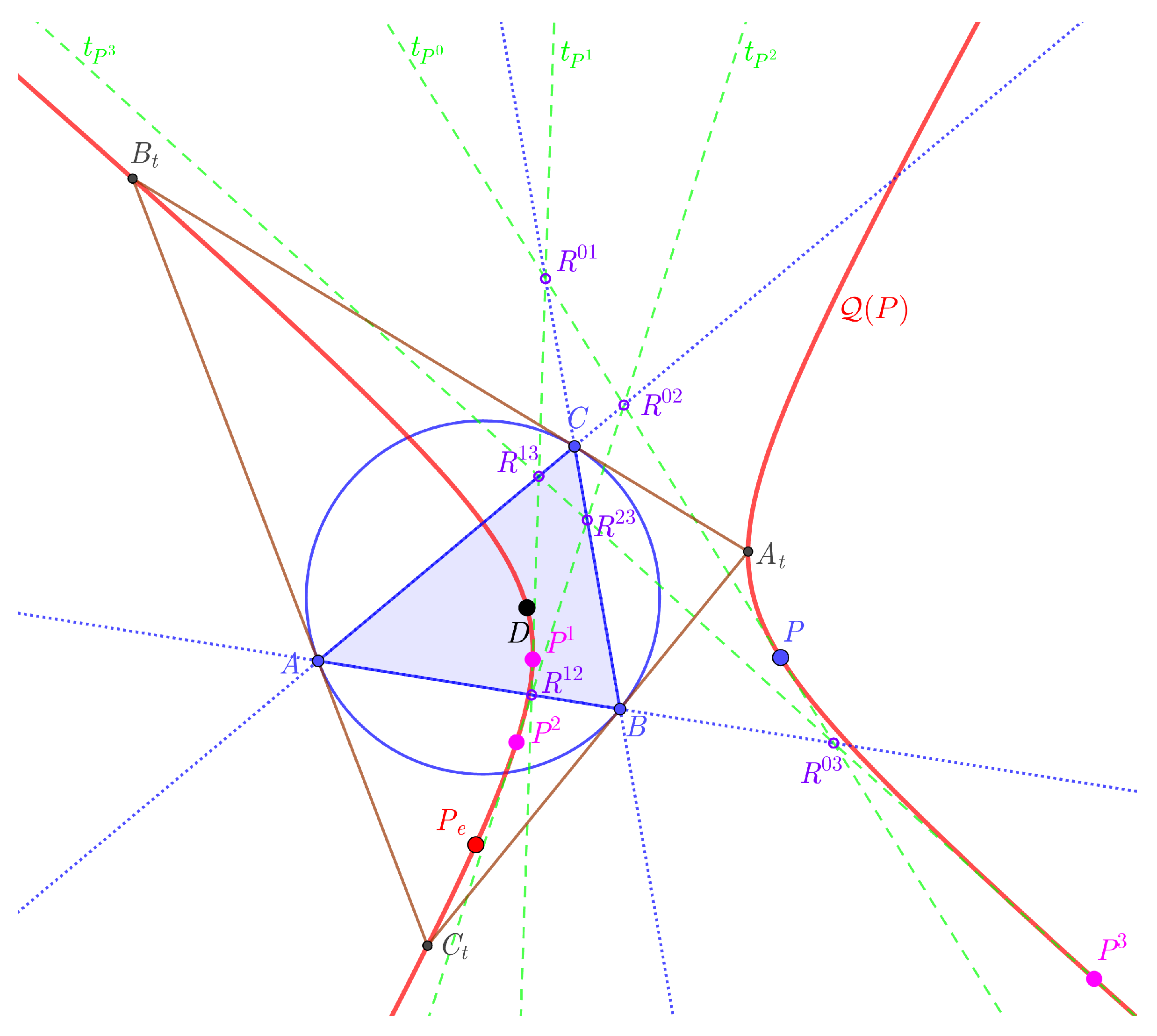
Theorem 9. If the points , are mapped onto the same point by the Exeter transformation with respect to triangle , then the intersection points of the tangent lines , , , and are on the lines of the sides of triangle .
Proof. Let us consider an arbitrary line with barycentric equation
. If it is passing through the point
, then
. Moreover, the equation of the pencil of lines at
is
where
q and
r are the barycentric coordinates of the lines from the pencil. To derive the tangent line among them, we consider the system of Equations (
4) and (
7). If its discriminant is zero and we put
, then using (
5) we have
Finally, the equation of
is
Similarly, the equations of the pencil of lines at , and , respectively, are , and . Moreover, the equations of lines , , and , respectively, are , and .
Let the point
be the intersection of
and
. From the equations of lines we have that
, which is on the line
(
Figure 6).
The proof is similar in the case of the other intersection points. Moreover, the intersection points are , , , , and . □
Remark 4. The points and A, B, and C define a complete quadrilateral with diagonal points and projective harmonic conjugate point pairs with respect to the diagonal points. For example, in Figure 6, the points , , , and form a complete quadrilateral with diagonal points A, , ; B which is the projective harmonic conjugate of A with respect to and ; and C is the projective harmonic conjugate of A with respect to and . Their cross-ratio is . Corollary 12. The intersection of any two lines , , , and are on one of the sidelines of triangle .
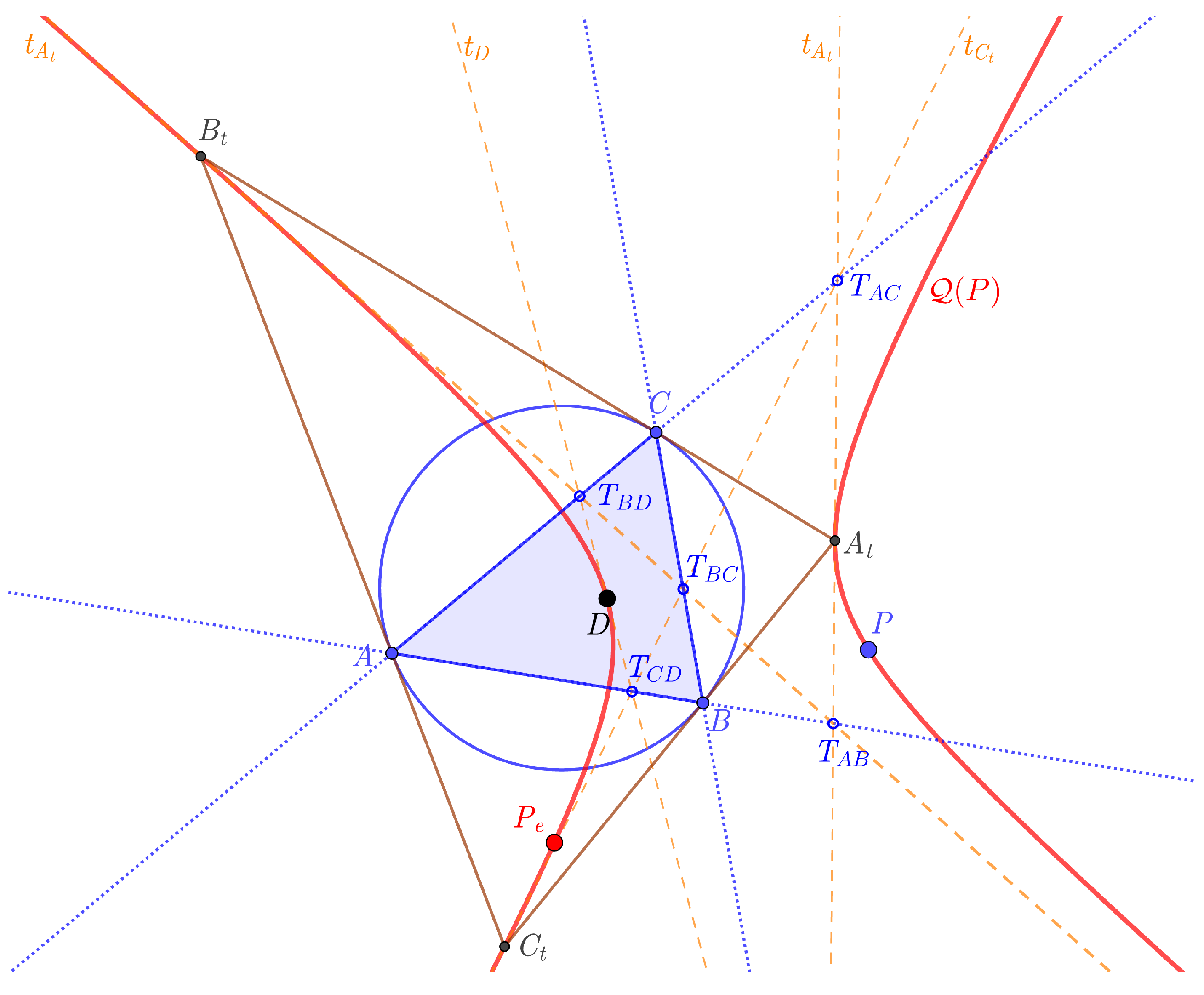
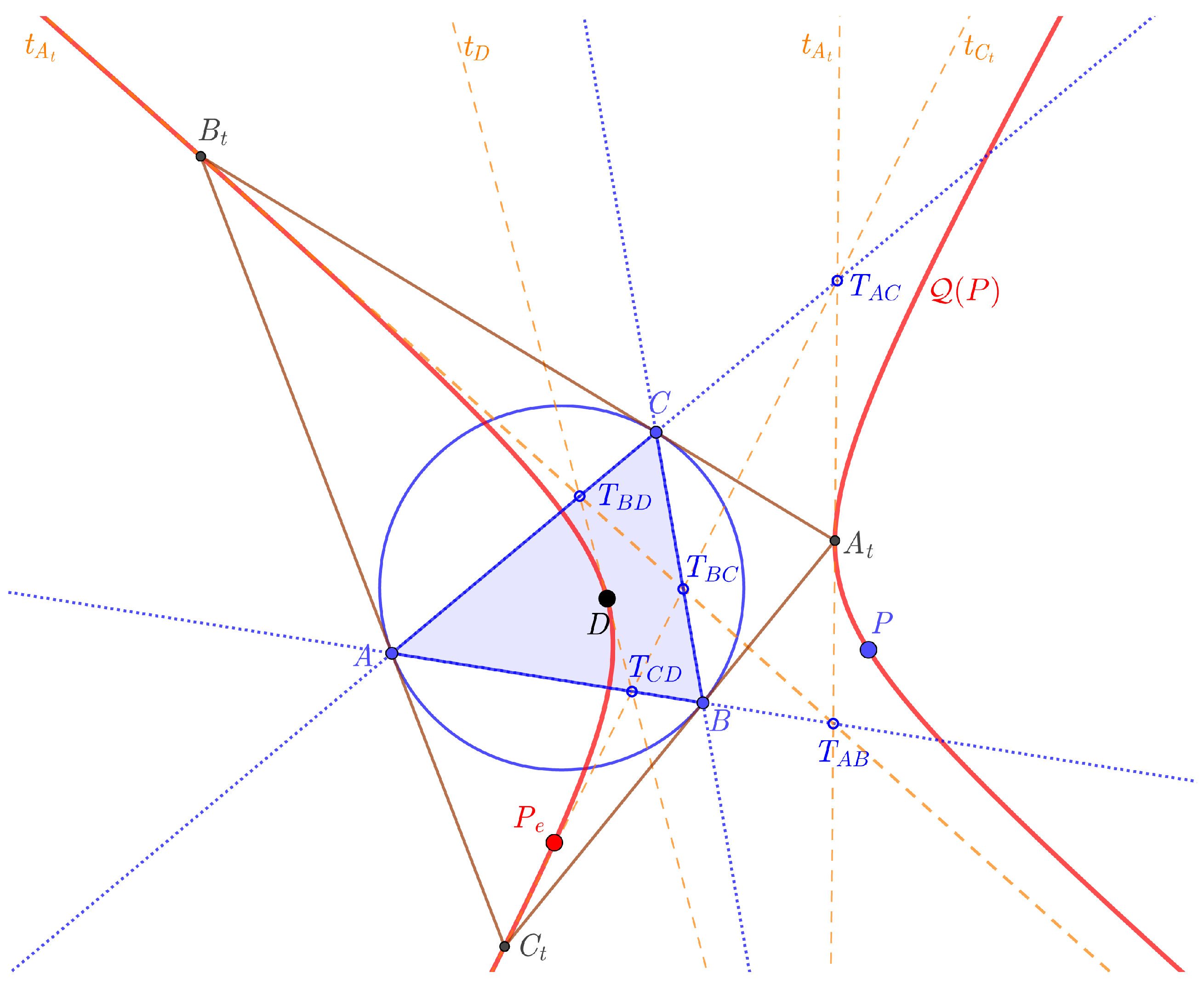
Proof. Considering Theorem 4, we obtain the statement from Theorem 9 (see
Figure 7). Moreover, the equations of
,
,
, and
, respectively, are
,
,
, and
. Their intersection points are
,
,
,
,
,
. □
Let
and
be the intersection points of line
and the non-degenerate
. Let us define similarly the points
,
,
, and
. Their coordinates from Equation (
4) are
,
,
,
,
, and
. (Recall
.) Naturally,
does not intersect the lines of the sides of
at the same time, for example,
could not be positive and negative at the same time. Thus, at most four points exist at the same time among the above points. See
Figure 8, when
intersects the lines
and
, so
,
and then
.
Theorem 10. The tangent lines to at points and are passing through the point C. Similarly, the tangent lines to at points , or , are passing through the points B or A, respectively.
Proof. The equations of the tangent lines at points and are and , respectively. Point C coincides with them. □
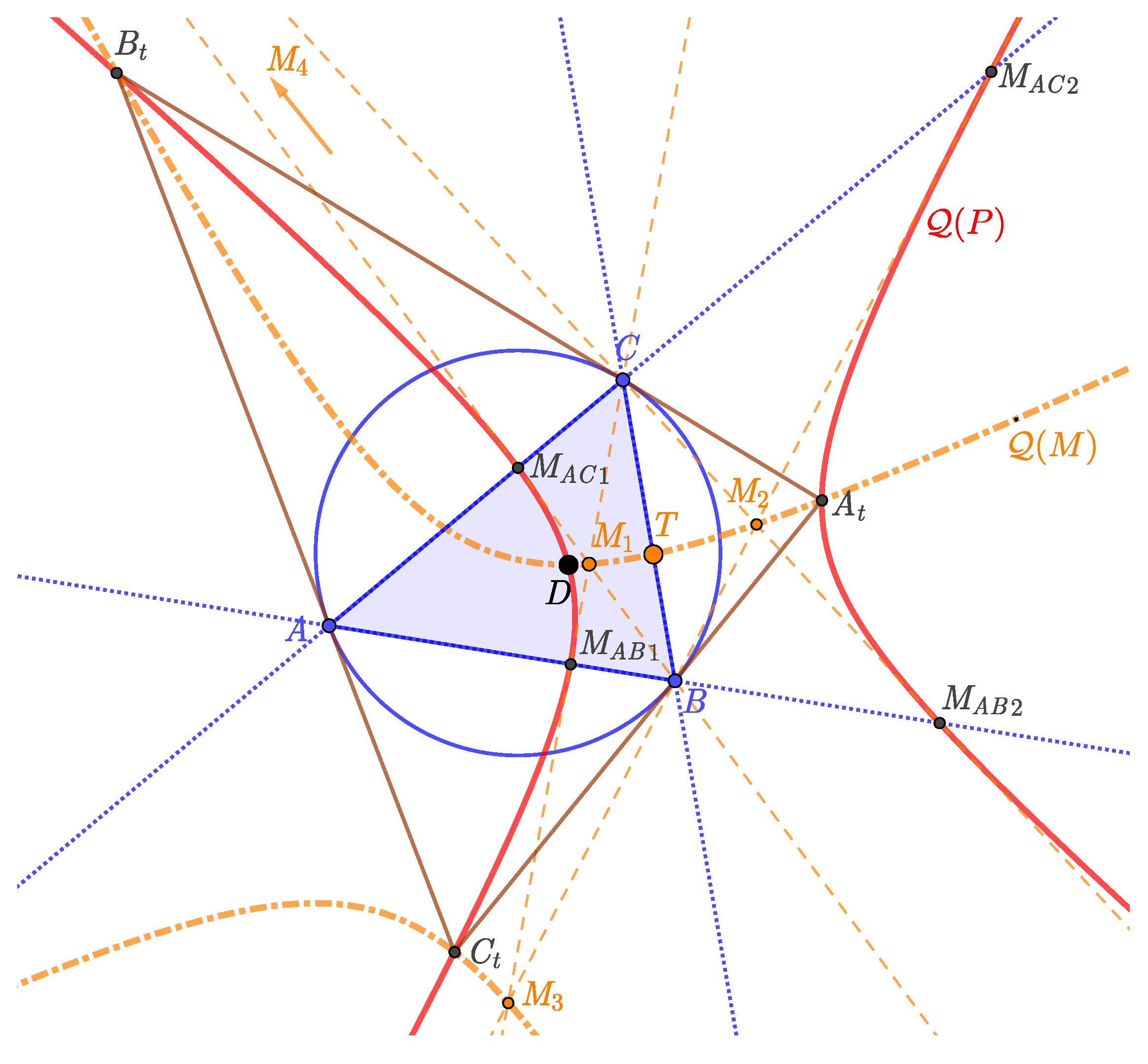
Let , , , and be the intersection points different from A, B, and C of the tangent lines at , , , , , and .
Theorem 11. The points , , and are on the same conic with one of the equationswhen does not intersect lines , , or , respectively. Proof. First, we consider the case of
Figure 8. The points
,
,
, and
define a complete quadrangle with diagonal points
A,
B, and
C and according to Corollary 11 they are on the same conic of
. The barycentric coordinates of
are
. The Equation (
8) is determined similarly to the equation of
in Theorem 7.
Second, when
does not intersect the lines
or
, respectively, the coordinates of
are
or
. They yield the Equations (
9) and (
10). □
Theorem 12. The Exeter transformations of , , , and are the same point T lying on one of the lines of . Moreover, T coincides with , , or , when does not intersect the lines , , or , respectively.
Proof. We use Corollaries 2 and 5. Analytically, for example, in case of
Figure 8,
. □
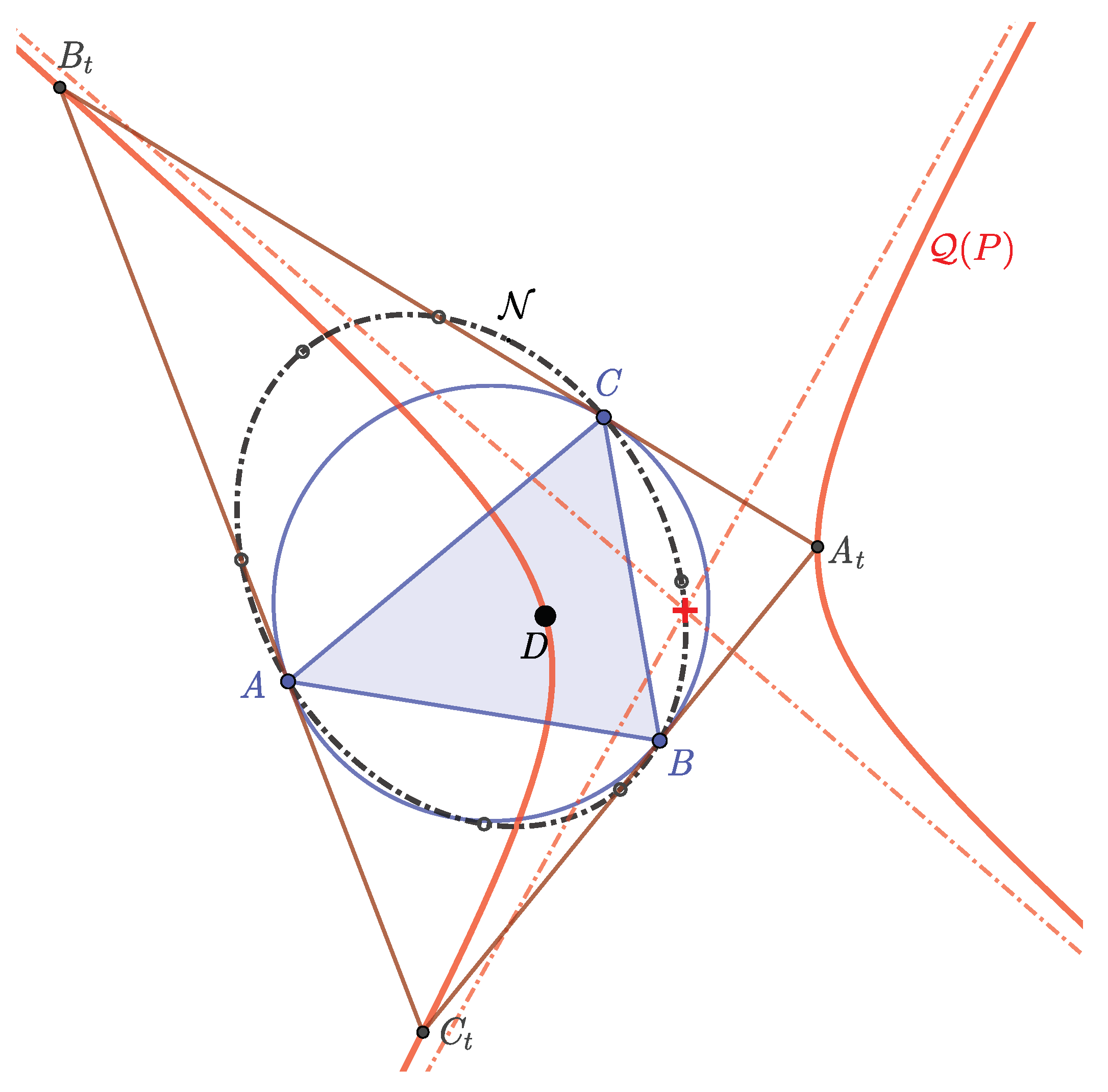
Let
be the nine-point conic determined by points
,
,
, and
D [
10]. Conic
is passing through the points
A,
B,
C, and the midpoints of all segments of points
,
,
, and
D. Moreover, it also well known that the center of a conic passing through points
,
,
, and
D is on the nine-point conic
[
10]. This proves the following theorem.
Theorem 13. The center of the conic is lying on the conic (Figure 9). With a short calculation, we have
for the equation of
and the coordinates of the center of
are




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}